
Non-Parametric Calibration of the Inverse Kinematic Matrix of a Three-Wheeled Omnidirectional Mobile Robot Based on Genetic Algorithms



Abstract
Featured Application
Abstract
1. Introduction
New Contribution
2. Materials and Methods
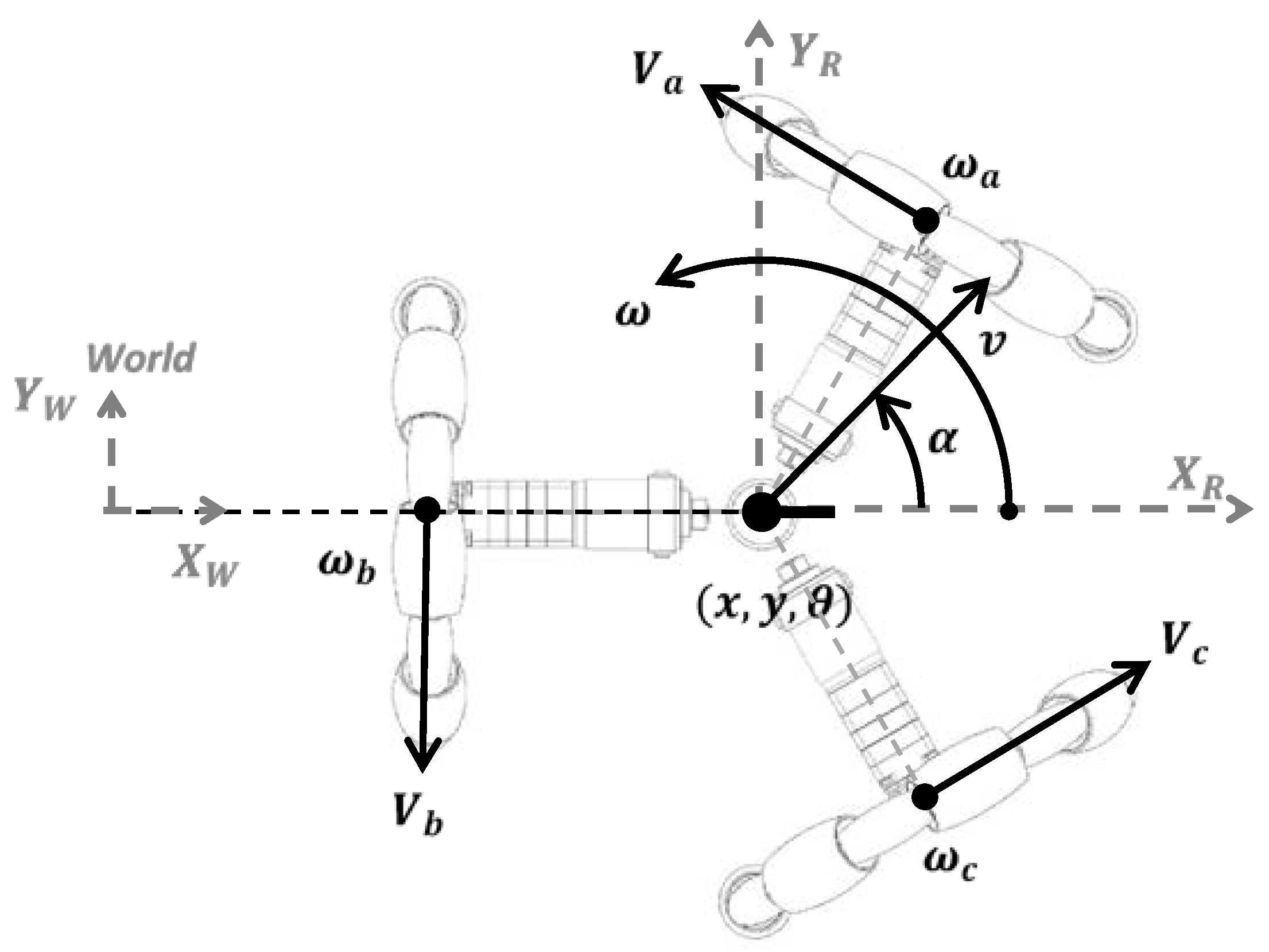
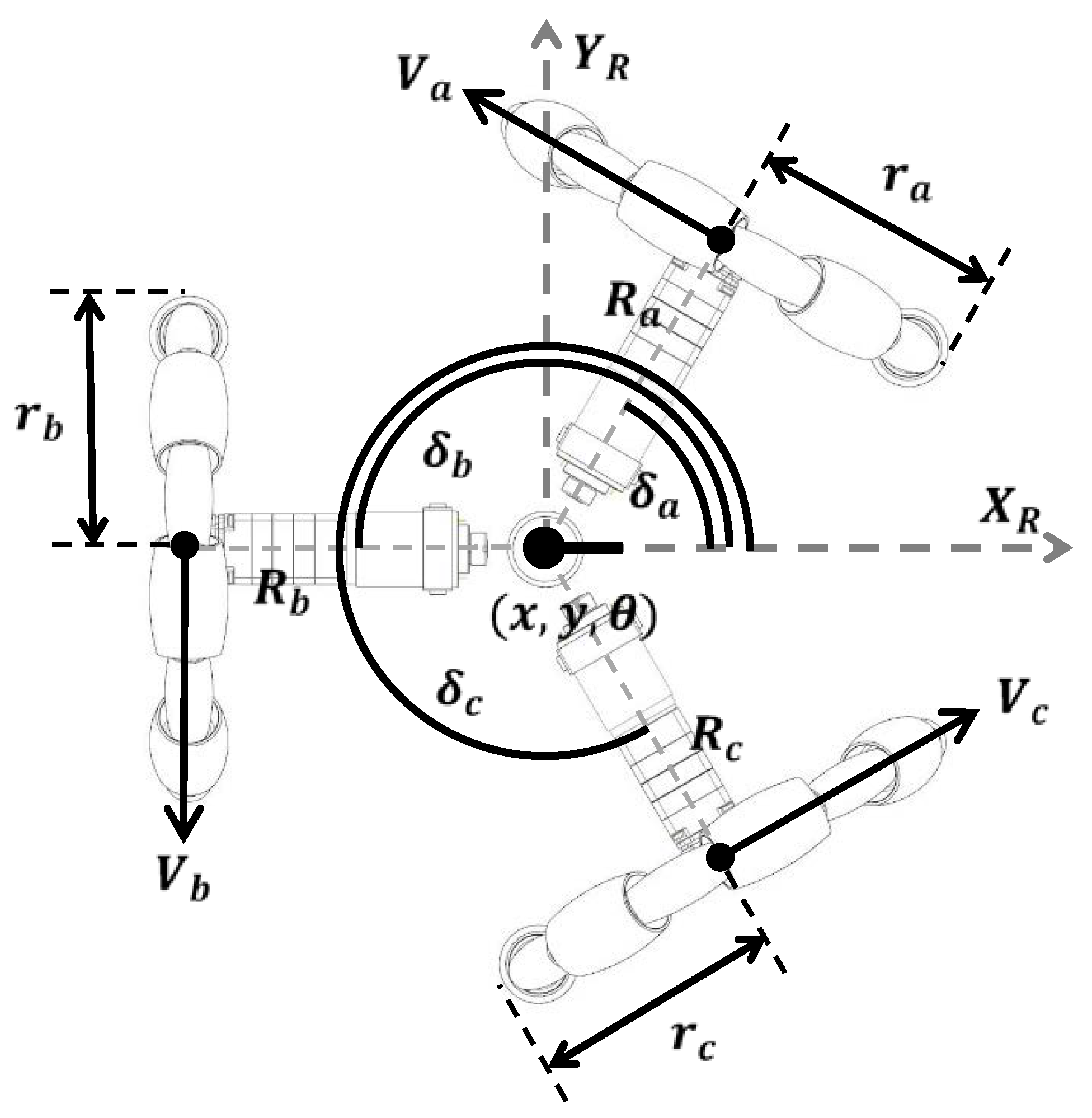
2.1. APR-02 Three-Wheeled Omnidirectional Mobile Robot
2.2. Odometry Estimation
2.3. Calibration Trajectories
2.4. Dataset of Training and Validation Trajectories
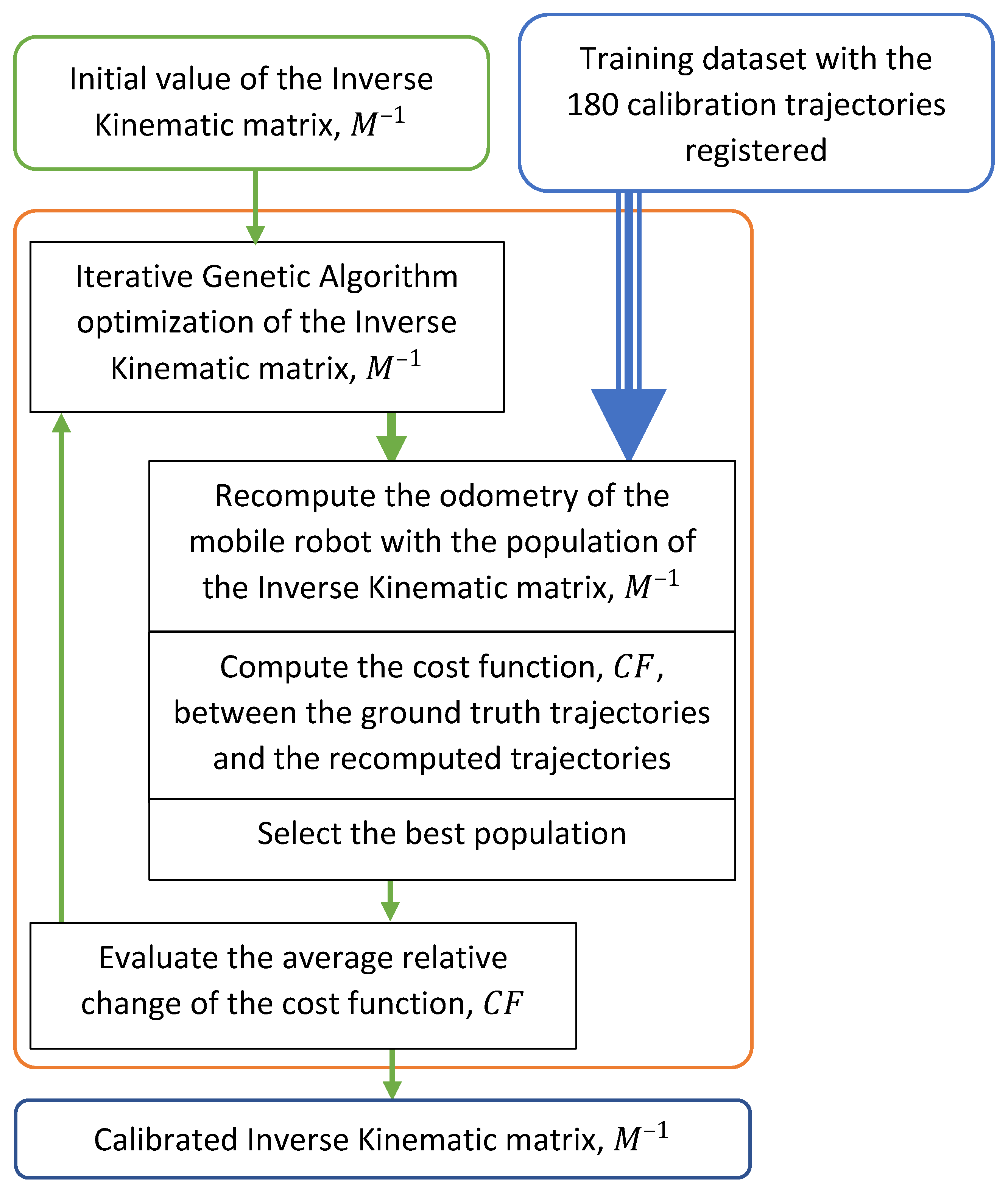
3. Procedure for Genetic Algorithm Calibration of the Inverse Kinematic Matrix
4. Results
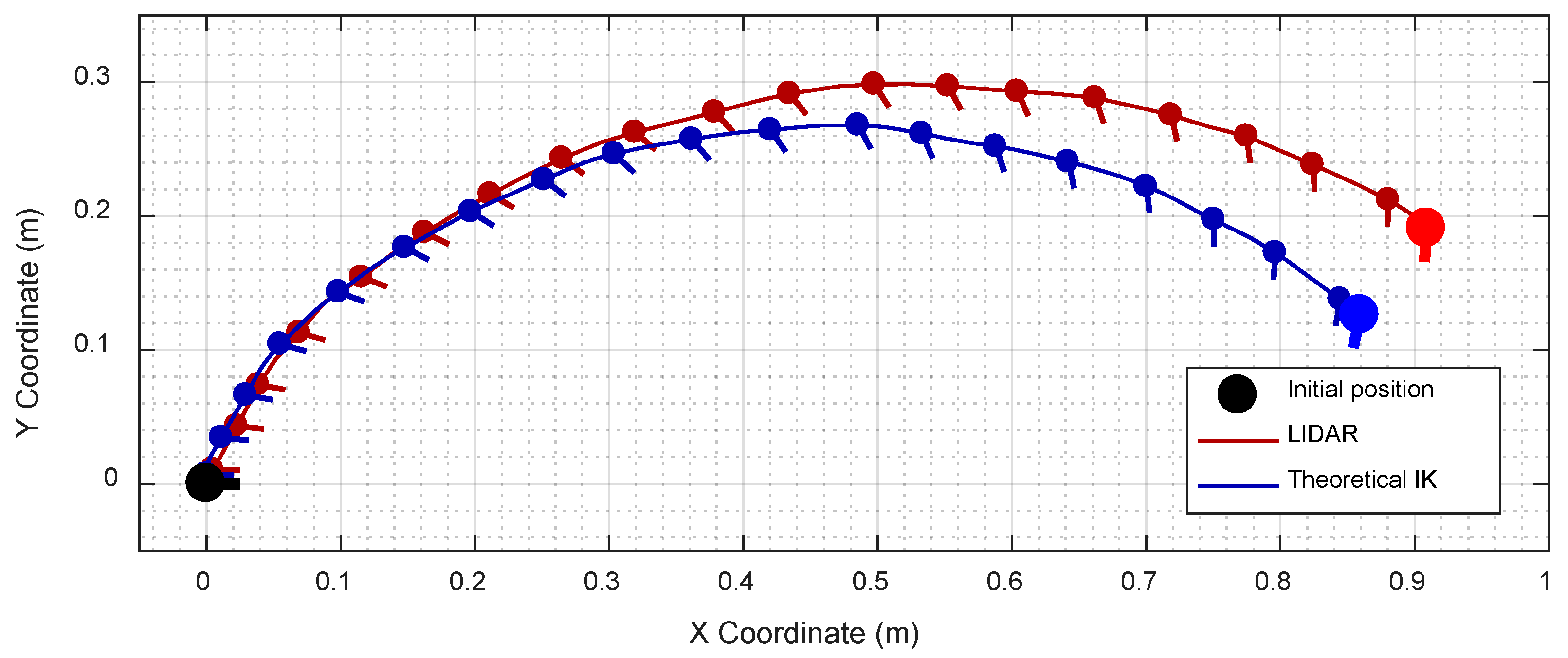
4.1. Reference Theoretical Value of the Inverse Kinematic Matrix
4.2. Reference Parametric Optimization of the Inverse Kinematic Matrix (from [17])
4.3. Non-Parametic Inverse Kinematic Matrix Calibrated with Genetic Algorithms
5. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Borenstein, J.; Feng, L. Measurement and correction of systematic odometry errors in mobile robots. IEEE Trans. Robot. Autom. 1996, 12, 869–880. [Google Scholar] [CrossRef]
- Štefek, A.; Pham, V.T.; Krivanek, V.; Pham, K.L. Optimization of Fuzzy Logic Controller Used for a Differential Drive Wheeled Mobile Robot. Appl. Sci. 2021, 11, 6023. [Google Scholar] [CrossRef]
- Ding, T.; Zhang, Y.; Ma, G.; Cao, Z.; Zhao, X.; Tao, B. Trajectory tracking of redundantly actuated mobile robot by MPC velocity control under steering strategy constraint. Mechatronics 2022, 84, 102779. [Google Scholar] [CrossRef]
- Thai, N.H.; Ly, T.T.K.; Dzung, L.Q. Trajectory tracking control for differential-drive mobile robot by a variable parameter PID controller. Int. J. Mech. Eng. Robot. Res. 2022, 11. [Google Scholar] [CrossRef]
- de Jesús Rubio, J.; Aquino, V.; Figueroa, M. Inverse kinematics of a mobile robot. Neural Comput. Appl. 2013, 23, 187–194. [Google Scholar] [CrossRef]
- Sousa, R.B.; Petry, M.R.; Moreira, A.P. Evolution of Odometry Calibration Methods for Ground Mobile Robots. In Proceedings of the IEEE International Conference on Autonomous Robot Systems and Competitions (ICARSC), Ponta Delgada, Portugal, 15–17 April 2020; pp. 294–299. [Google Scholar] [CrossRef]
- Hijikata, M.; Miyagusuku, R.; Ozaki, K. Wheel Arrangement of Four Omni Wheel Mobile Robot for Compactness. Appl. Sci. 2022, 12, 5798. [Google Scholar] [CrossRef]
- Maddahi, Y.; Maddahi, A.; Sepehri, N. Calibration of omnidirectional wheeled mobile robots: Method and experiments. Robotica 2013, 31, 969–980. [Google Scholar] [CrossRef]
- Lin, P.; Liu, D.; Yang, D.; Zou, Q.; Du, Y.; Cong, M. Calibration for Odometry of Omnidirectional Mobile Robots Based on Kinematic Correction. In Proceedings of the 14th International Conference on Computer Science & Education (ICCSE), Toronto, ON, Canada, 19–21 August 2019; pp. 139–144. [Google Scholar] [CrossRef]
- Maulana, E.; Muslim, M.A.; Hendrayawan, V. Inverse kinematic implementation of four-wheels mecanum drive mobile robot using stepper motors. In Proceedings of the 2015 International Seminar on Intelligent Technology and Its Applications (ISITIA), Surabaya, Indonesia, 20–21 May 2015; pp. 51–56. [Google Scholar] [CrossRef]
- Jia, Q.; Wang, M.; Liu, S.; Ge, J.; Gu, C. Research and development of mecanum-wheeled omnidirectional mobile robot implemented by multiple control methods. In Proceedings of the 2016 23rd International Conference on Mechatronics and Machine Vision in Practice (M2VIP), Nanjing, China, 28–30 November 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Xu, H.; Yu, D.; Wang, Q.; Qi, P.; Lu, G. Current Research Status of Omnidirectional Mobile Robots with Four Mecanum Wheels Tracking based on Sliding Mode Control. In Proceedings of the 2019 IEEE International Conference on Unmanned Systems and Artificial Intelligence (ICUSAI), Xi’an, China, 22–24 November 2019; pp. 13–18. [Google Scholar] [CrossRef]
- Li, Y.; Ge, S.; Dai, S.; Zhao, L.; Yan, X.; Zheng, Y.; Shi, Y. Kinematic Modeling of a Combined System of Multiple Mecanum-Wheeled Robots with Velocity Compensation. Sensors 2020, 20, 75. [Google Scholar] [CrossRef]
- Savaee, E.; Hanzaki, A.R. A New Algorithm for Calibration of an Omni-Directional Wheeled Mobile Robot Based on Effective Kinematic Parameters Estimation. J. Intell. Robot. Syst. 2021, 101, 28. [Google Scholar] [CrossRef]
- Bożek, A. Discovering Stick-Slip-Resistant Servo Control Algorithm Using Genetic Programming. Sensors 2022, 22, 383. [Google Scholar] [CrossRef]
- Prados Sesmero, C.; Buonocore, L.R.; Di Castro, M. Omnidirectional Robotic Platform for Surveillance of Particle Accelerator Environments with Limited Space Areas. Appl. Sci. 2021, 11, 6631. [Google Scholar] [CrossRef]
- Palacín, J.; Rubies, E.; Clotet, E. Systematic Odometry Error Evaluation and Correction in a Human-Sized Three-Wheeled Omnidirectional Mobile Robot Using Flower-Shaped Calibration Trajectories. Appl. Sci. 2022, 12, 2606. [Google Scholar] [CrossRef]
- Sharma, H.P.; Pant, M.; Agarwal, R.; Karatangi, S.V. Self-directed Robot for Car Driving Using Genetic Algorithm. In Technology Innovation in Mechanical Engineering. Lecture Notes in Mechanical Engineering; Chaurasiya, P.K., Singh, A., Verma, T.N., Rajak, U., Eds.; Springer: Singapore, 2022. [Google Scholar] [CrossRef]
- Tagliani, F.L.; Pellegrini, N.; Aggogeri, F. Machine Learning Sequential Methodology for Robot Inverse Kinematic Modelling. Appl. Sci. 2022, 12, 9417. [Google Scholar] [CrossRef]
- Zhu, Z.; Liu, Y.; He, Y.; Wu, W.; Wang, H.; Huang, C.; Ye, B. Fuzzy PID Control of the Three-Degree-of-Freedom Parallel Mechanism Based on Genetic Algorithm. Appl. Sci. 2022, 12, 11128. [Google Scholar] [CrossRef]
- Cardoza Plata, J.E.; Olguín Carbajal, M.; Herrera Lozada, J.C.; Sandoval Gutierrez, J.; Rivera Zarate, I.; Serrano Talamantes, J.F. Simulation and Implementation of a Mobile Robot Trajectory Planning Solution by Using a Genetic Micro-Algorithm. Appl. Sci. 2022, 12, 11284. [Google Scholar] [CrossRef]
- Rahmaniar, W.; Rakhmania, A. Mobile Robot Path Planning in a Trajectory with Multiple Obstacles Using Genetic Algorithms. J. Robot. Control. 2021, 3, 1–7. [Google Scholar] [CrossRef]
- Batlle, J.A.; Font-Llagunes, J.M.; Barjau, A. Calibration for mobile robots with an invariant Jacobian, Robot. Auton. Syst. 2010, 58, 10–15. [Google Scholar] [CrossRef]
- Clotet, E.; Martínez, D.; Moreno, J.; Tresanchez, M.; Palacín, J. Assistant Personal Robot (APR): Conception and Application of a Tele-Operated Assisted Living Robot. Sensors 2016, 16, 610. [Google Scholar] [CrossRef]
- Palacín, J.; Clotet, E.; Martínez, D.; Martínez, D.; Moreno, J. Extending the Application of an Assistant Personal Robot as a Walk-Helper Tool. Robotics 2019, 8, 27. [Google Scholar] [CrossRef]
- Palacín, J.; Martínez, D.; Clotet, E.; Pallejà, T.; Burgués, J.; Fonollosa, J.; Pardo, A.; Marco, S. Application of an Array of Metal-Oxide Semiconductor Gas Sensors in an Assistant Personal Robot for Early Gas Leak Detection. Sensors 2019, 19, 1957. [Google Scholar] [CrossRef]
- Penteridis, L.; D’Onofrio, G.; Sancarlo, D.; Giuliani, F.; Ricciardi, F.; Cavallo, F.; Greco, A.; Trochidis, I.; Gkiokas, A. Robotic and Sensor Technologies for Mobility in Older People. Rejuvenation Res. 2017, 20, 401–410. [Google Scholar] [CrossRef] [PubMed]
- Palacín, J.; Martínez, D.; Rubies, E.; Clotet, E. Suboptimal Omnidirectional Wheel Design and Implementation. Sensors 2021, 21, 865. [Google Scholar] [CrossRef]
- Bitriá, R.; Palacín, J. Optimal PID Control of a Brushed DC Motor with an Embedded Low-Cost Magnetic Quadrature Encoder for Improved Step Overshoot and Undershoot Responses in a Mobile Robot Application. Sensors 2022, 22, 7817. [Google Scholar] [CrossRef]
- Palacín, J.; Rubies, E.; Clotet, E.; Martínez, D. Evaluation of the Path-Tracking Accuracy of a Three-Wheeled Omnidirectional Mobile Robot Designed as a Personal Assistant. Sensors 2021, 21, 7216. [Google Scholar] [CrossRef]
- Lluvia, I.; Lazkano, E.; Ansuategi, A. Active Mapping and Robot Exploration: A Survey. Sensors 2021, 21, 2445. [Google Scholar] [CrossRef] [PubMed]
- Palacín, J.; Martínez, D.; Rubies, E.; Clotet, E. Mobile Robot Self-Localization with 2D Push-Broom LIDAR in a 2D Map. Sensors 2020, 20, 2500. [Google Scholar] [CrossRef] [PubMed]
- Popovici, A.-T.; Dosoftei, C.-C.; Budaciu, C. Kinematics Calibration and Validation Approach Using Indoor Positioning System for an Omnidirectional Mobile Robot. Sensors 2022, 22, 8590. [Google Scholar] [CrossRef]
- Mora, A.; Prados, A.; Mendez, A.; Barber, R.; Garrido, S. Sensor Fusion for Social Navigation on a Mobile Robot Based on Fast Marching Square and Gaussian Mixture Model. Sensors 2022, 22, 8728. [Google Scholar] [CrossRef]
- Fraser, A. Simulation of genetic systems by automatic digital computers. I. Introduction. Aust. J. Biol. Sci. 1957, 10, 484–491. [Google Scholar] [CrossRef]
- George, P.H. Styan, Hadamard products and multivariate statistical analysis. Linear Algebra Its Appl. 1973, 6, 217–240. [Google Scholar] [CrossRef]
- Boanta, C.; Brișan, C. Estimation of the Kinematics and Workspace of a Robot Using Artificial Neural Networks. Sensors 2022, 22, 8356. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Description |
|---|---|
| Target motion command for the robot : translational velocity of the displacement of the robot, (m/s) : angular orientation of the displacement, (°) : angular rotational speed of the robot during the displacement, (rad/s) : linear distance to be achieved during the displacement, (m) | |
| Target angular velocities for the wheels : target angular velocity defined for the motor of the wheel , computed when receiving the motion command, (rpm) | |
| Angular velocities of the wheels provided by the encoders : time the update was received, (s) : instantaneous angular velocity measured by the encoder of the motor , updated periodically at a frame rate of 10 ms, (rpm) | |
| Trajectory of the mobile robot estimated with the odometry : location of the robot, (m) : angular orientation of the robot, (°) | |
| Scans provided by the onboard LIDAR : time the scan was received, (s) : distance scan corresponding to the angular orientation , updated periodically at a frame rate from 200 to 300 ms, (mm) | |
| Ground Truth trajectory of the mobile robot estimated with SLAM : location of the robot, (m) : angular orientation of the robot, (°) |
| Improvement | |||
|---|---|---|---|
| Theoretical IK | 0.1234 | - | - |
| Parametric IK [17] | 0.1234 | 0.0215 | 82.61% |
| Non-parametric IK * | 0.1234 | 0.0215 * | 82.60% * |
| Improvement | |||
|---|---|---|---|
| Theoretical IK | 0.1251 | - | - |
| Parametric IK [17] | 0.1251 | 0.0229 | 81.68% |
| Non-parametric IK * | 0.1251 | 0.0227 * | 81.81% * |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palacín, J.; Rubies, E.; Bitrià, R.; Clotet, E. Non-Parametric Calibration of the Inverse Kinematic Matrix of a Three-Wheeled Omnidirectional Mobile Robot Based on Genetic Algorithms. Appl. Sci. 2023, 13, 1053. https://doi.org/10.3390/app13021053
Palacín J, Rubies E, Bitrià R, Clotet E. Non-Parametric Calibration of the Inverse Kinematic Matrix of a Three-Wheeled Omnidirectional Mobile Robot Based on Genetic Algorithms. Applied Sciences. 2023; 13(2):1053. https://doi.org/10.3390/app13021053
Chicago/Turabian StylePalacín, Jordi, Elena Rubies, Ricard Bitrià, and Eduard Clotet. 2023. "Non-Parametric Calibration of the Inverse Kinematic Matrix of a Three-Wheeled Omnidirectional Mobile Robot Based on Genetic Algorithms" Applied Sciences 13, no. 2: 1053. https://doi.org/10.3390/app13021053
APA StylePalacín, J., Rubies, E., Bitrià, R., & Clotet, E. (2023). Non-Parametric Calibration of the Inverse Kinematic Matrix of a Three-Wheeled Omnidirectional Mobile Robot Based on Genetic Algorithms. Applied Sciences, 13(2), 1053. https://doi.org/10.3390/app13021053