
Multiple Elimination Based on Mode Decomposition in the Elastic Half Norm Constrained Radon Domain


Abstract
:1. Introduction
2. Methods
2.1. Sparse Radon Transform with the Elastic Half-Norm Constraint
| Algorithm 1 The pseudocode for the proposed EH-SRT |
| Input: . Output: . Initialize: is the estimated Radon model of LSRT, , and |
| 1: for to do |
| 2: update the sparse Radon model with 3: update with Equations (14)–(17) 4: update with If Exit 5: end for |
2.2. Geometric Mode Decomposition
| Algorithm 2 The ADMM algorithm for the GMD-R problem | |
. is the Radon model of input data is the maximum iteration times. | |
| do | |
| do | |
| : | |
| 4: end for | |
| do | |
| : | |
| 7:
end for | |
| (22) | |
| 9: end for | |
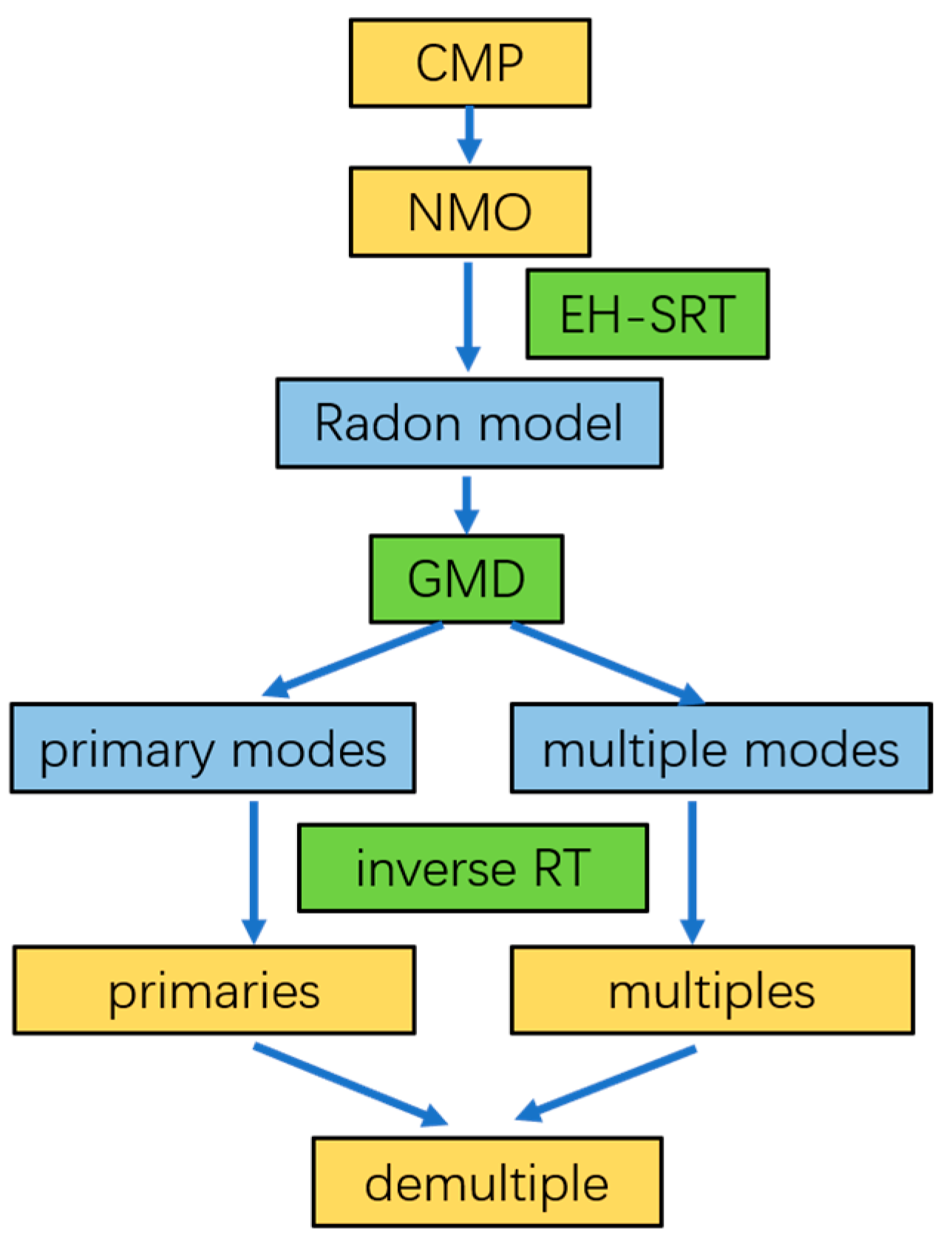
- (1)
- Apply NMO correction to the input CMP gather data and then calculate the Radon model using the LSRT;
- (2)
- By setting the number of decomposition modes to 2, perform GMD-R to the Radon model following Algorithm 2 and obtain the separated primary and multiple modes in the Radon domain;
- (3)
- Perform inverse RT to the separated primary modes and the demultiple result is finally obtained.
2.3. Improve GMD-R with the EH Norm Constraint Sparse Radon Transform
3. Numerical Examples
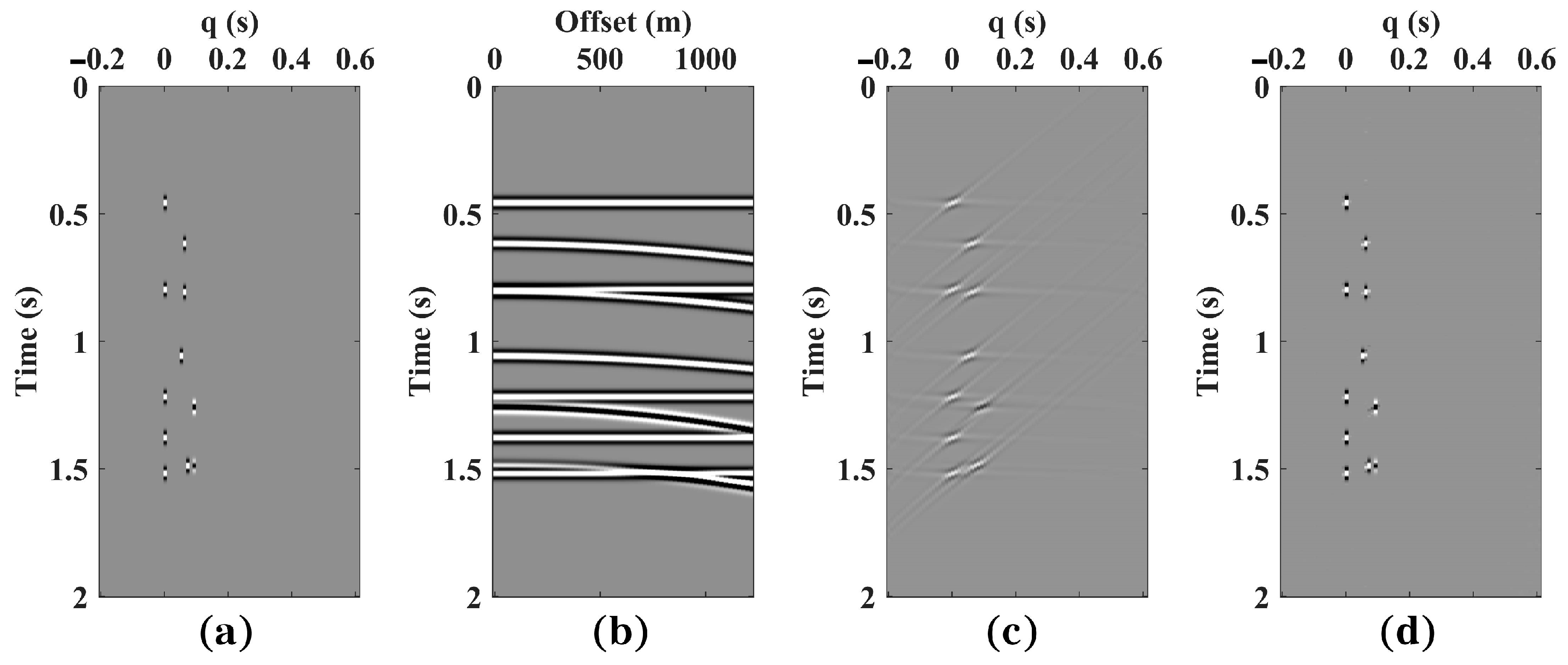
3.1. Synthetic Data 1 Test
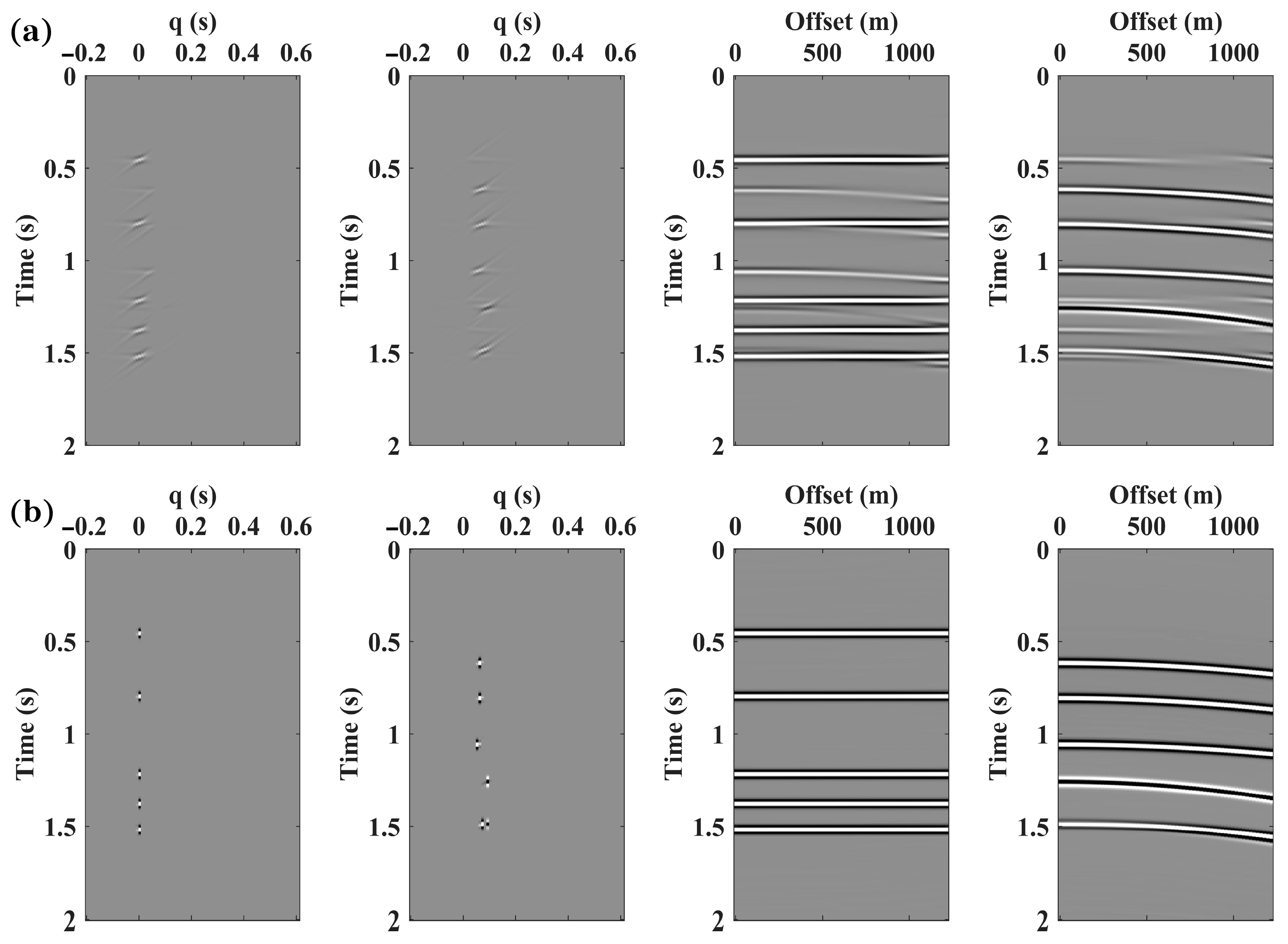
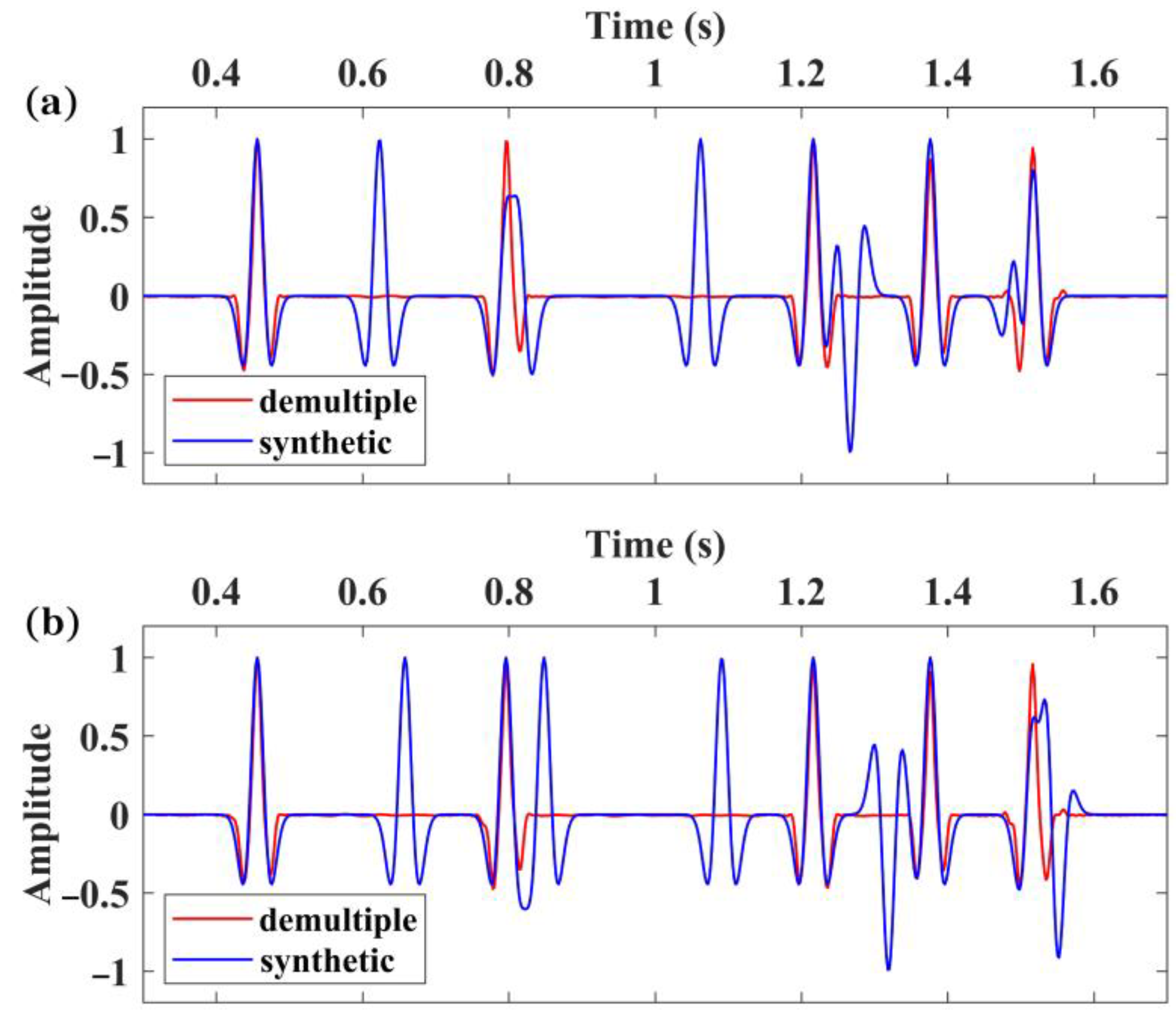
3.2. Synthetic Data 2 Test
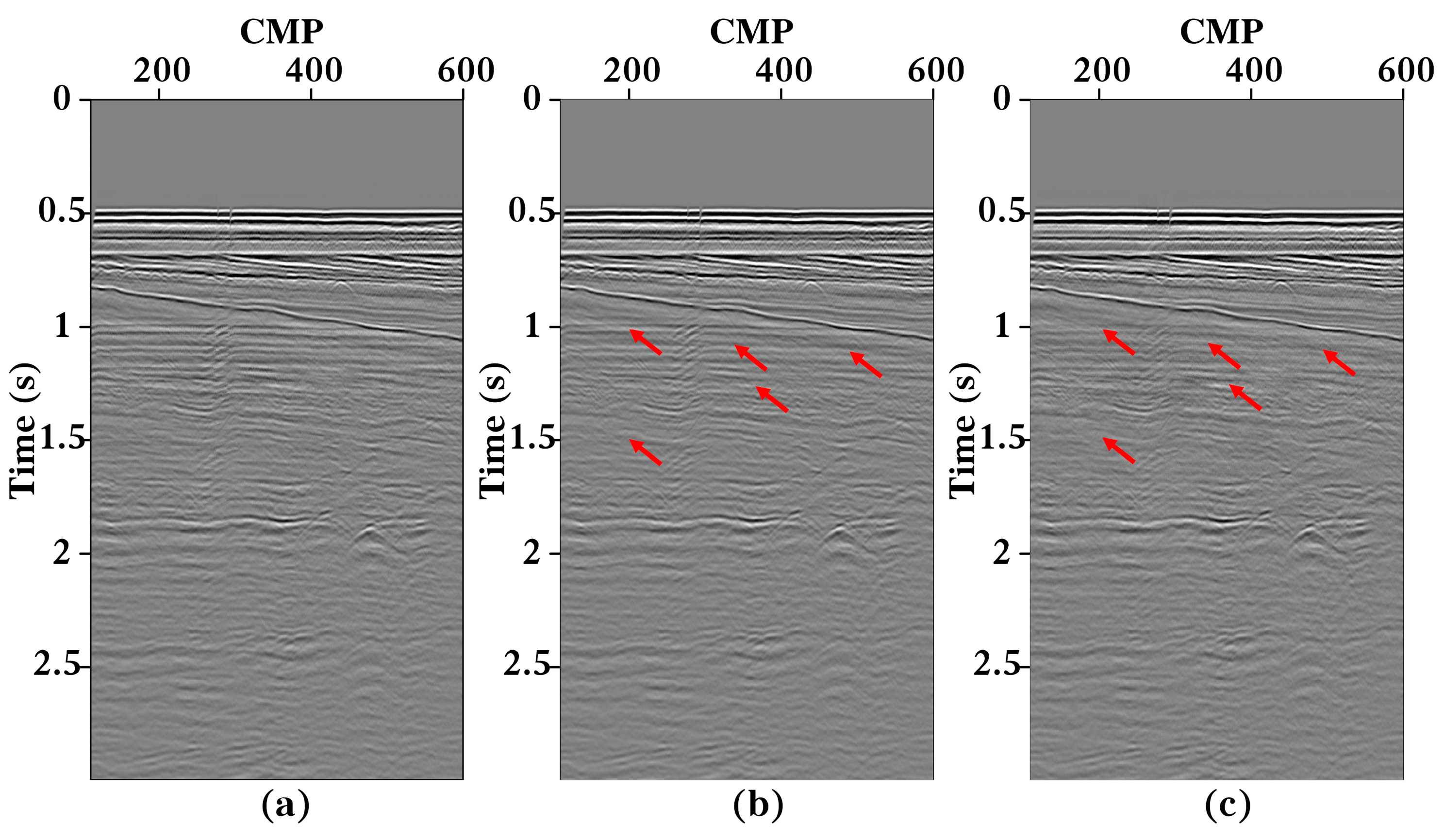
3.3. Field Data Test
4. Discussion
4.1. The Effect of the Number of Decomposed Modes
4.2. The Computational Efficiency of the ES-SRT and GMD
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yilmaz, Ö. Seismic Data Processing: Processing, Inversion, and Interpretation of Seismic Data; Society of Exploration Geophysicists: Houston, TX, USA, 2008; ISBN 978-1-56080-094-1. [Google Scholar]
- Zhang, Y.; Liu, Y.; Yi, J. Least-Squares Reverse-Time Migration of Water-Bottom-Related Multiples. Remote Sens. 2022, 14, 5979. [Google Scholar] [CrossRef]
- Bruno, P.P.G. Seismic Exploration Methods for Structural Studies and for Active Fault Characterization: A Review. Appl. Sci. 2023, 13, 9473. [Google Scholar] [CrossRef]
- Malehmir, A.; Durrheim, R.; Bellefleur, G.; Urosevic, M.; Juhlin, C.; White, D.J.; Milkereit, B.; Campbell, G. Seismic Methods in Mineral Exploration and Mine Planning: A General Overview of Past and Present Case Histories and a Look into the Future. Geophysics 2012, 77, WC173–WC190. [Google Scholar] [CrossRef]
- John, B.; Diebold; Paul, L. Stoffa The Traveltime Equation, Tau-Rho Mapping and Inversion of Common Midpoint Data. Geophysics 1981, 46, 238–254. [Google Scholar] [CrossRef]
- Trad, D.; Ulrych, T.; Sacchi, M. Latest Views of the Sparse Radon Transform. Geophysics 2003, 68, 386–399. [Google Scholar] [CrossRef]
- Wang, B.; Wang, J.; Li, J.; Guo, Z. Iterative Accurate Seismic Data Deblending by ASB-Based Robust Sparse Radon Transform. IEEE Trans. Geosci. Remote Sens. 2021, 60, 5902309. [Google Scholar] [CrossRef]
- Xue, Y.; Man, M.; Zu, S.; Chang, F.; Chen, Y. Amplitude-Preserving Iterative Deblending of Simultaneous Source Seismic Data Using High-Order Radon Transform. J. Appl. Geophys. 2017, 139, 79–90. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Y.; Zheng, Y.; Chang, X. Deblending Using a High-Resolution Radon Transform in a Common Midpoint Domain. J. Geophys. Eng. 2015, 12, 167–174. [Google Scholar] [CrossRef]
- Kabir, M.M.N.; Verschuur, D.J. Restoration of Missing Offsets by Parabolic Radon Transform1. Geophys. Prospect. 1995, 43, 347–368. [Google Scholar] [CrossRef]
- Trad, D.O.; Ulrych, T.J.; Sacchi, M.D. Accurate Interpolation with High-Resolution Time-Variant Radon Transforms. Geophysics 2002, 67, 25–26. [Google Scholar] [CrossRef]
- Verschuur, D.J. Seismic Multiple Removal Techniques: Past, Present and Future (EET 1); Earthdoc: Houten, The Netherlands, 2013; ISBN 978-90-73834-96-5. [Google Scholar]
- Foster, D.J.; Mosher, C.C. Suppression of Multiple Reflections Using the Radon Transform. Geophysics 1992, 57, 386–395. [Google Scholar] [CrossRef]
- Han, J.; van der Baan, M. Empirical Mode Decomposition for Seismic Time-Frequency Analysis. Geophysics 2013, 78, O9–O19. [Google Scholar] [CrossRef]
- Gómez, J.L.; Velis, D.R. A Simple Method Inspired by Empirical Mode Decomposition for Denoising Seismic Data. Geophysics 2016, 81, V403–V413. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.C.; Tung, C.C.; Liu, H.H. The Empirical Mode Decomposition and the Hilbert Spectrum for Nonlinear and Non-Stationary Time Series Analysis. Proc. Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Han, J.; Baan, M.V.D. Empirical Mode Decomposition and Robust Seismic Attribute Analysis. In Proceedings of the #90173 CSPG/CSEG/CWLS GeoConvention 2011, Calgary, AB, Canada, 9–11 May 2011. [Google Scholar]
- Dragomiretskiy, K.; Zosso, D. Variational Mode Decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- Liu, W.; Liu, Y.; Li, S.; Chen, Y. A Review of Variational Mode Decomposition in Seismic Data Analysis. Surv. Geophys. 2023, 44, 323–355. [Google Scholar] [CrossRef]
- Liu, W.; Duan, Z. Seismic Signal Denoising Using F-x Variational Mode Decomposition. IEEE Geosci. Remote Sens. Lett. 2020, 17, 1313–1317. [Google Scholar] [CrossRef]
- Yu, S.; Ma, J.; Osher, S. Geometric mode decomposition. Inverse Probl. Imaging 2018, 12, 831–852. [Google Scholar] [CrossRef]
- Boyd, S.; Parikh, N.; Chu, E.; Peleato, B.; Eckstein, J. Distributed Optimization and Statistical Learning via the Alternating Direction Method of Multipliers. Found. Trends® Mach. Learn. 2011, 3, 1–122. [Google Scholar]
- He, S.; Zheng, J.; Feng, M.; Chen, Y. Communication-Efficient Federated Learning with Adaptive Consensus ADMM. Appl. Sci. 2023, 13, 5270. [Google Scholar] [CrossRef]
- Lin, P.; Peng, S.; Li, C.; Xiang, Y.; Cui, X. Separation and Imaging of Seismic Diffractions Using Geometric Mode Decomposition. Geophysics 2023, 88, WA239–WA251. [Google Scholar] [CrossRef]
- Kabir, M.M.N.; Marfurt, K.J. Toward True Amplitude Multiple Removal. Lead. Edge 1999, 18, 66–73. [Google Scholar] [CrossRef]
- Sacchi, M.D.; Ulrych, T.J. High-Resolution Velocity Gathers and Offset Space Reconstruction. Geophysics 1995, 60, 1169–1177. [Google Scholar] [CrossRef]
- Cary, P.W. The Simplest Discrete Radon Transform. In SEG Technical Program Expanded Abstracts 1998; Society of Exploration Geophysicists: Houston, TX, USA, 1998; pp. 1999–2002. [Google Scholar]
- Schonewille, M.; Aaron, P. Applications of Time-Domain High-Resolution Radon Demultiple. In SEG Technical Program Expanded Abstracts 2007; Society of Exploration Geophysicists: Houston, TX, USA, 2007; pp. 2565–2569. [Google Scholar]
- Lu, W. An Accelerated Sparse Time-Invariant Radon Transform in the Mixed Frequency-Time Domain Based on Iterative 2D Model Shrinkage. Geophysics 2013, 78, V147–V155. [Google Scholar] [CrossRef]
- Gholami, A.; Sacchi, M.D. Time-Invariant Radon Transform by Generalized Fourier Slice Theorem. Inverse Probl. Imaging 2017, 11, 501–519. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, Y.; Lu, W.; Geng, J. A Robust and Efficient Sparse Time-Invariant Radon Transform in the Mixed Time–Frequency Domain. IEEE Trans. Geosci. Remote Sens. 2019, 57, 7558–7566. [Google Scholar] [CrossRef]
- Kazemi, N.; Sacchi, M.D. Offset-Extended Sparse Radon Transform: Application to Multiple Suppression in the Presence of Amplitude Variations with Offset. Geophysics 2021, 86, R293–R302. [Google Scholar] [CrossRef]
- Geng, W.; Chen, X.; Li, J.; Ma, J.; Tang, W.; Wu, F. Sparse Radon Transform in the Mixed Frequency-Time Domain with ℓ 1–2 Minimization. Geophysics 2022, 87, V545–V558. [Google Scholar] [CrossRef]
- Geng, W.; Li, J.; Chen, X.; Ma, J.; Xu, J.; Zhu, G.; Tang, W. 3D High-Order Sparse Radon Transform with L1–2 Minimization for Multiple Attenuation. Geophys. Prospect. 2022, 70, 655–676. [Google Scholar] [CrossRef]
- Chen, Y.; Pan, S.; Wu, Y.; Wei, Z.; Song, G. Direct Inversion Method of Brittleness Parameters Based on Reweighted Lp-Norm. Appl. Sci. 2023, 13, 246. [Google Scholar] [CrossRef]
- Li, J.; Sacchi, M.D. An Lp-Space Matching Pursuit Algorithm and Its Application to Robust Seismic Data Denoising via Time-Domain Radon transformsRobust Matching Pursuit Deblending. Geophysics 2021, 86, V171–V183. [Google Scholar] [CrossRef]
- Lan, N.; Zhang, F.; Li, C. Robust High-Dimensional Seismic Data Interpolation Based on Elastic Half Norm Regularization and Tensor Dictionary Learning. Geophysics 2021, 86, V431–V444. [Google Scholar] [CrossRef]
- Lan, N.; Zhang, F.; Xiao, K.; Zhang, H.; Lin, Y. Low-Dimensional Multi-Trace Impedance Inversion in Sparse Space with Elastic Half Norm Constraint. Minerals 2023, 13, 972. [Google Scholar] [CrossRef]
- Durrani, T.S.; Bisset, D. The Radon Transform and Its Properties. Geophysics 1984, 49, 1180–1187. [Google Scholar] [CrossRef]
- Schonewille, M.A.; Duijndam, A.J.W. Parabolic Radon Transform, Sampling and Efficiency. Geophysics 2001, 66, 667–678. [Google Scholar] [CrossRef]
- Abbad, B.; Ursin, B.; Porsani, M.J. A Fast, Modified Parabolic Radon Transform. Geophysics 2011, 76, V11–V24. [Google Scholar] [CrossRef]
- Verschuur, D.J. Surface-Related Multiple Elimination, an Inversion Approach. Ph.D. Thesis, Delft University of Technology, Delft, The Netherlands, 1991. [Google Scholar]
- Dragoset, B.; Verschuur, E.; Moore, I.; Bisley, R. A Perspective on 3D Surface-Related Multiple Elimination. Geophysics 2010, 75, 75A245–75A261. [Google Scholar] [CrossRef]
- Wang, P.; Jin, H.; Yang, M.; Xu, S. A Model-Based Water-Layer Demultiple Algorithm. First Break. 2014, 32, 63–68. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Data | Method | Computation Time (s) | Method | Computation Time (s) |
|---|---|---|---|---|
| Synthetic data 2 | LSRT | 1.08 | GMD-R | 2.17 |
| EH-SRT | 3.56 | GMD-R | 1.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, A.; Song, J.; Su, Y.; Hu, C. Multiple Elimination Based on Mode Decomposition in the Elastic Half Norm Constrained Radon Domain. Appl. Sci. 2023, 13, 11041. https://doi.org/10.3390/app131911041
Ma A, Song J, Su Y, Hu C. Multiple Elimination Based on Mode Decomposition in the Elastic Half Norm Constrained Radon Domain. Applied Sciences. 2023; 13(19):11041. https://doi.org/10.3390/app131911041
Chicago/Turabian StyleMa, An, Jianguo Song, Yufei Su, and Caijun Hu. 2023. "Multiple Elimination Based on Mode Decomposition in the Elastic Half Norm Constrained Radon Domain" Applied Sciences 13, no. 19: 11041. https://doi.org/10.3390/app131911041
APA StyleMa, A., Song, J., Su, Y., & Hu, C. (2023). Multiple Elimination Based on Mode Decomposition in the Elastic Half Norm Constrained Radon Domain. Applied Sciences, 13(19), 11041. https://doi.org/10.3390/app131911041