1. Introduction
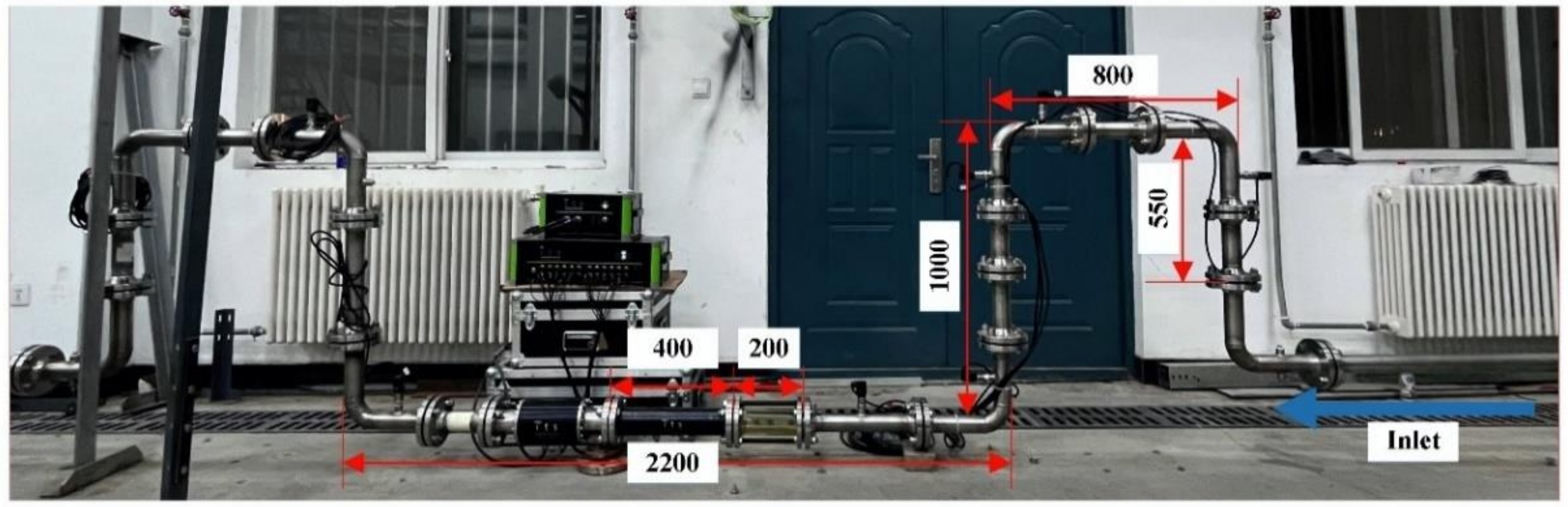
In the subsea production system, a jumper is a pipeline connecting the wellhead, Christmas tree, pipeline manifold, and pipeline terminal, transporting the extracted oil and gas. As shown in
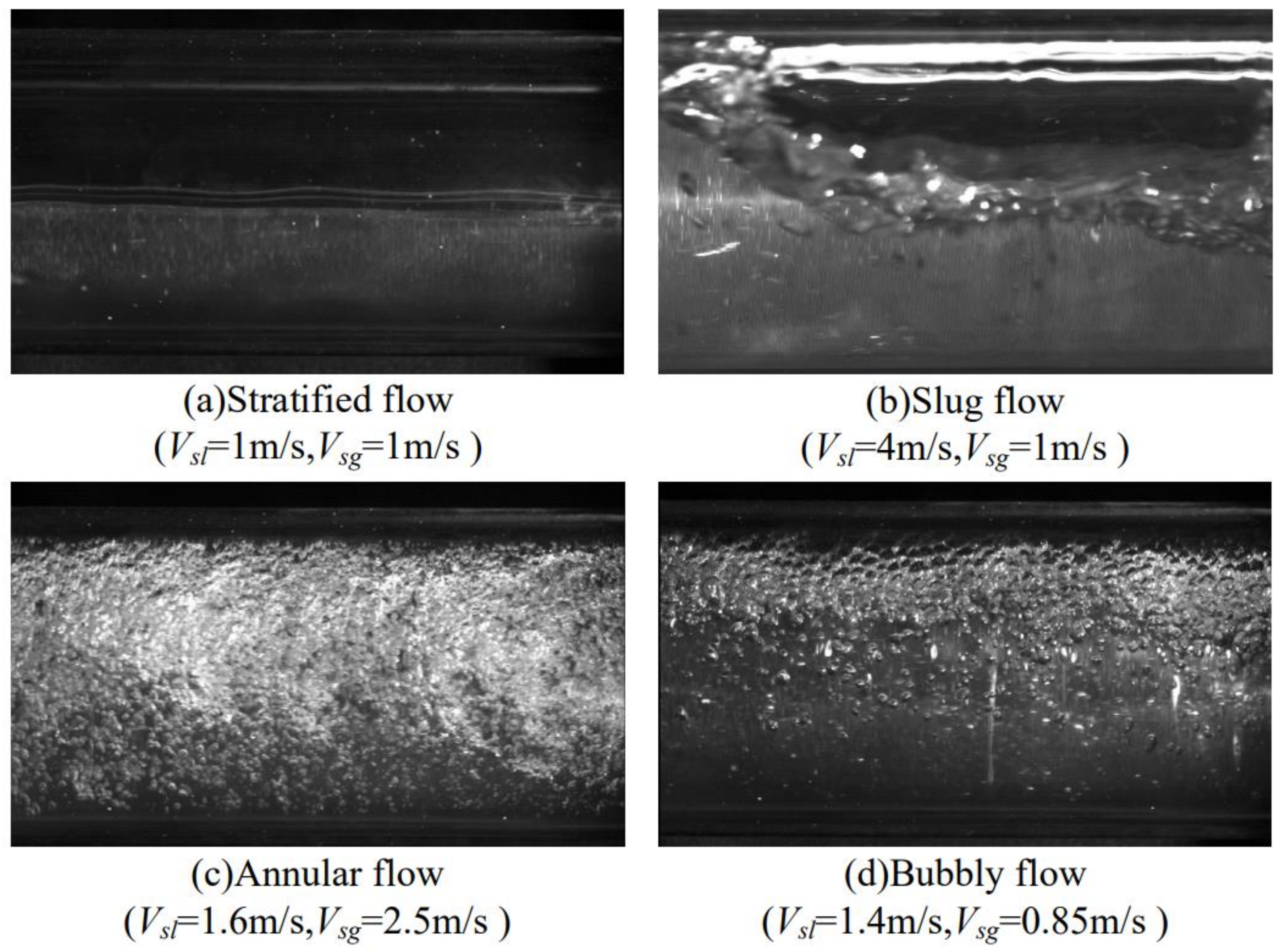
Figure 1, a typical M-shaped rigid jumper has multiple bending sections and long overhanging sections. The generation and transformation of flow patterns inside the jumper are closely related to variable gas–liquid velocities, different gas content rates, and pipe shapes and sizes. Stratified flow, slug flow, annular flow, and bubbly flow are commonly seen multiphase flow patterns inside subsea jumpers. The research of flow patterns is essential for understanding multiphase flow characteristics for the design and safety of underwater production systems and operation efficiency. It can also determine the potential dangerous factors and take corresponding protection measures [
1]. Therefore, it is important to study how the jumper’s internal flow pattern changes with the flow rate of gas or liquid.
The traditional gas–liquid two-phase flow pattern identification method is simplex and mainly relies on experimental data acquisition, in which researchers obtain flow pattern distribution diagrams of different flow patterns by experimental findings that describe how the flow patterns change and identify them from the practical level. The Baker flow pattern diagram [
3] and Mandhane flow pattern diagram [
4] are the most representative. However, this method has been gradually eliminated by scholars. As the classification of flow diagrams varies with the subjective perception of scholars and is based on the results of a few different kinds of fluids within a certain range of parameters, the applicability of flow diagrams is conditional. At present, the main flow pattern identification methods are direct observation and indirect measurement [
5]. Direct observation methods mainly include the visual method and high-speed camera method. This identification method is individually dependent and it is difficult to form a general identification standard for flow classification when using it. The indirect measurement method is based on data processing and analysis of the actual measurement signals of various extracted characteristics of different flow patterns. Carvalho et al. [
6] collected the vibration signals of two-phase flow in a vertical pipe and extracted the signals’ root mean square values and the Pearson correlation coefficients to accurately classify the studied cases. By using electrical capacitance tomography (ECT) based on fuzzy logic, Fiderek et al. [
7] were able to determine the flow patterns in vertical pipes and horizontal pipes with inner diameters of 38 mm, 60 mm, and 90 mm. Ma et al. [
8] identified five flow patterns according to the flow pattern maps, pressure drop, and power spectral density (PSD) distribution of pressure drop in a bent tube, studied the regularity characteristics of PSD skewness and multiscale entropy (MSE) rate, and the flow patterns in U-shaped tubes were identified objectively. However, this method of identifying flow patterns based on extracting features from sensor signals consumes a lot of time and effort in the pre-processing data stage, which reduces the efficiency of real-time identification.
A flow pattern recognition method based on deep learning has received wide attention. The deep learning model emphasizes the depth of model structure and the importance of feature learning, which can more profoundly depict data-rich information. To collect different photos of oil–water two-phase flow patterns, Du et al. [
9] set up an oil–water experiment platform. They used an image segmentation method based on the lowest gray level to extract the characteristics of the flow patterns. To extract image features, three common convolutional neural networks structures were used to identify typical oil–water two-phase flow patterns. OuYang et al. [
10] constructed a different deep neural network model. By importing two-phase flow conductivity signals into the bidirectional extended short-term memory network and CNN, considerable signal details were used to understand the depth characteristics of distinct flow patterns. The results show that the model can accurately identify complex flow patterns.
The aforementioned methods only use data from a single sensor and feature extraction of only one source of information, and do not fully utilize the rich understanding of the flow patterns in order to identify the feature fusion flow pattern. This can affect generalization performance of the recognition method, which means it is not fully applicable to different flow patterns. Therefore, the present study uses multi-sensor information fusion (MSIF) for flow pattern recognition to improve the model generalization performance.
Multi-sensor information fusion (MSIF) is widely used in the military [
11], medical field [
12], fault diagnosis [
13], intelligent transportation [
14], and many other applications. For flow pattern identification, Toye et al. [
15] combined X-ray chromatography imaging and capacitance chromatography imaging, and fused the acquired data to understand and study the gas–liquid distribution of the absorption column at the experimental monitoring point. Hjertaker et al. [
16] used a combination of capacitance tomography and γ-imaging systems in their oil–gas–water three-phase flow rate detection study. Combining the two modalities, three-phase rate and flow pattern were obtained.
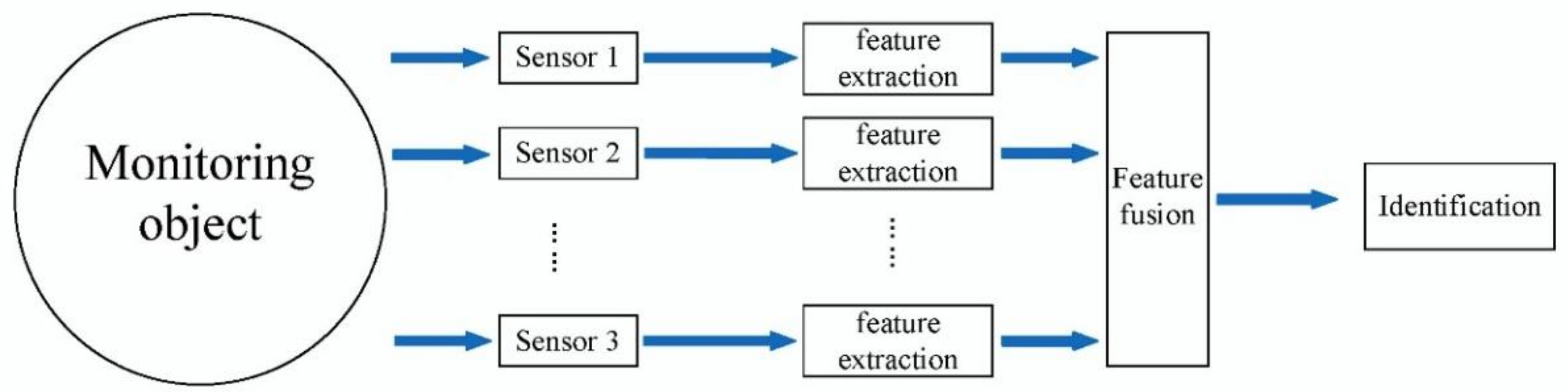
Up to now, data-level fusion, feature-level fusion, and decision-level fusion are the three main focuses of MSIF technology. Data-level fusion directly combines the original data from many sensors. Then feature vectors are extracted from the fusion data set for training and recognition, which requires two kinds of data from the same type of sensors and is computationally intensive. Decision-level fusion processes the data collected by all sensors for recognition, fuses the recognition results, and outputs the total decision results. It is greatly affected by the measurement target and has a high processing cost and the vast elements of the knowledge base. Feature-level fusion (
Figure 2) extracts features from the original data measured by each sensor, and then fuses the features extracted by each sensor into a feature vector to identify the target state.
Feature-level fusion technology is the most mature among the three levels of fusion. Since a complete set of proven feature association techniques has been established in feature fusion, the consistency of fused information can be guaranteed. Therefore, feature fusion is chosen as the mode of MSIF in the present research.
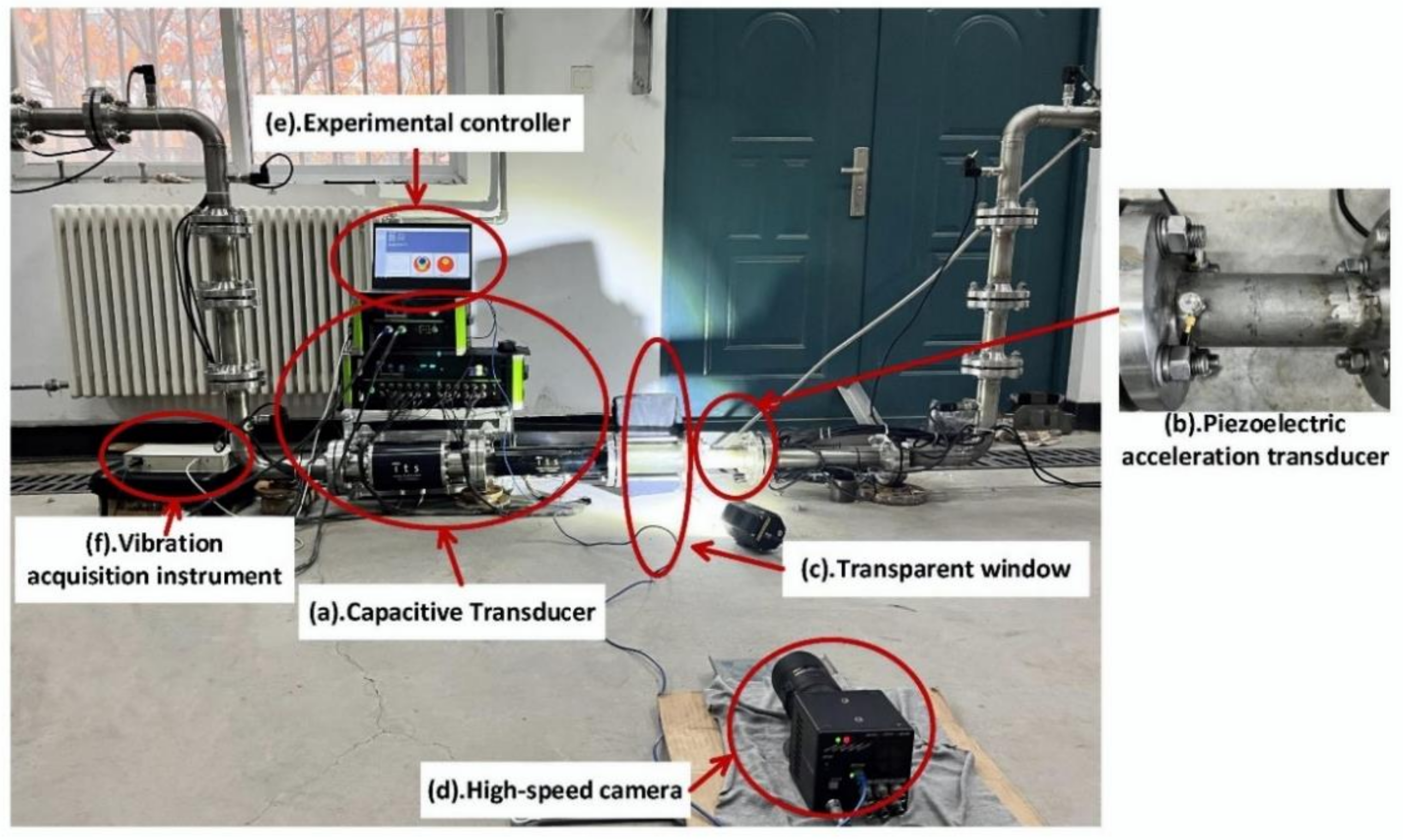
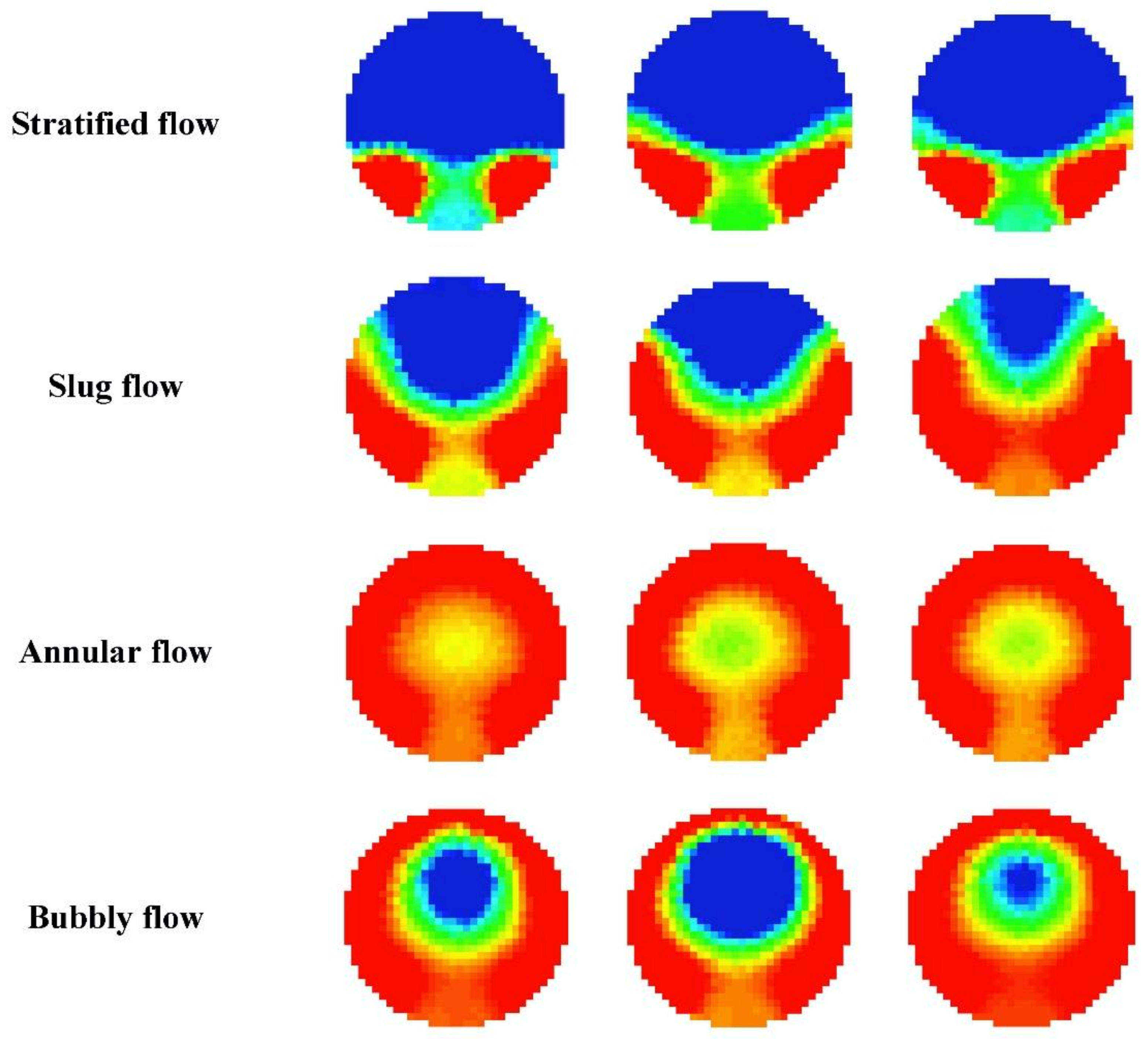
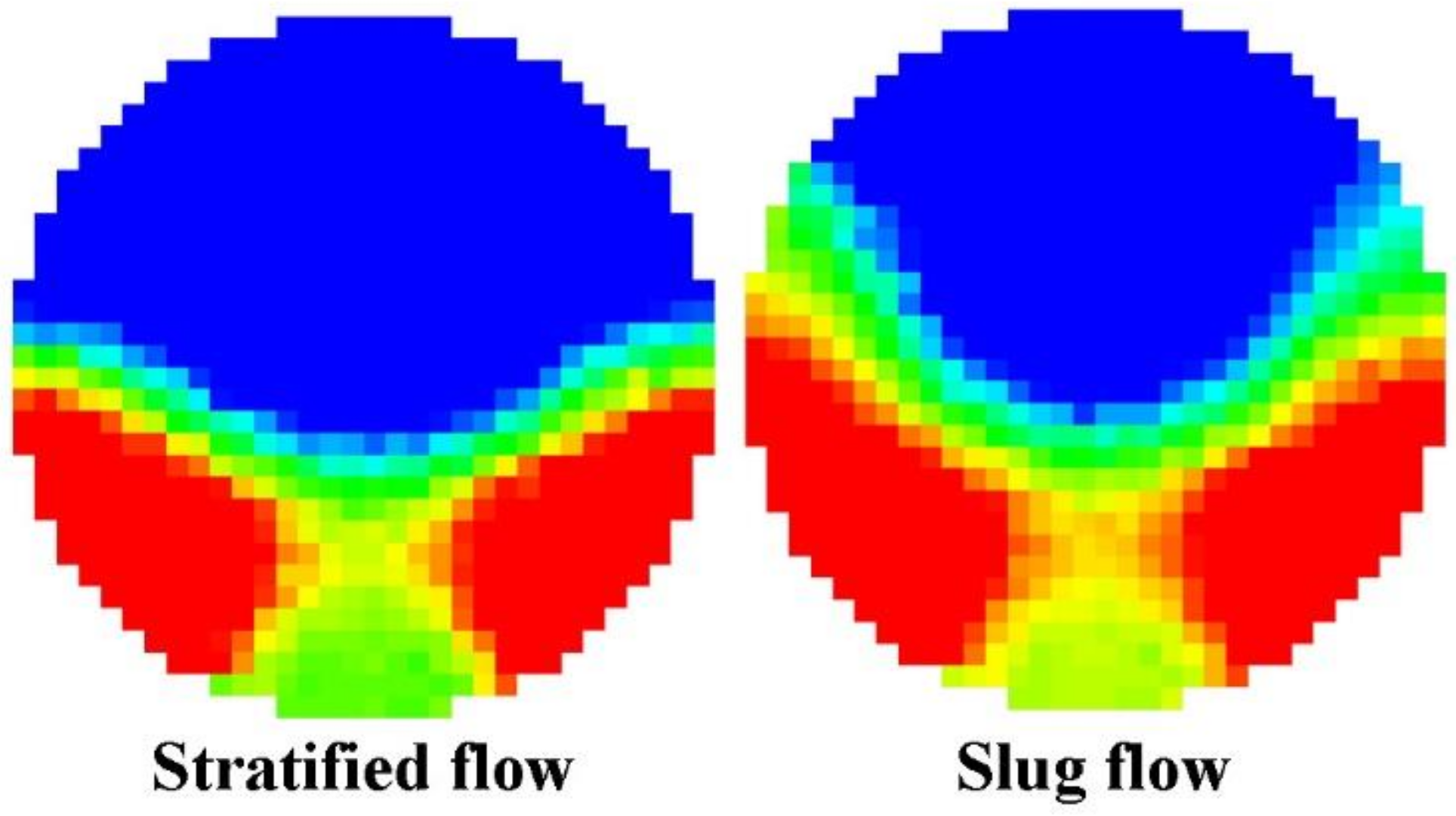
Deep learning has strong learning ability and good adaptability, and the disadvantages of single sensor testing simplex and incomplete information can be solved by multi-sensor information fusion technology. A convolutional neural network can automatically optimize features, remove noise, and obtain features. Therefore, the selected approach for the present work is based on CNN and feature fusion to identify the gas–liquid two-phase flow pattern of a subsea M-shaped rigid jumper. At the same time, the features of the flow vibration signal and capacitance chromatography signal are fused by correlation function. First, the experiment was conducted based on the multiphase flow experimental platform of Dalian Maritime University. Then a vibration signal acquisition system and a tomographic imaging acquisition system were built. Gas–liquid two-phase flow experiments were conducted simultaneously to obtain ECT image data sets and vibration signal data sets for four typical flow types: stratified flow, slug flow, annular flow, and bubbly flow. The convolution neural network structures suitable for signals and images were built to extract the features of two different signals, and the feature fusion was carried out at the complete connection layer. Finally, the integrated features were trained and classified.
The present study is structured as follows.
Section 2 covers the CNN theory, the feature fusion method, the capacitance tomography in, and the structure of the convolutional neural network fusion model proposed in this study.
Section 3 presents the experimental setup for multiphase flow, where four flow patterns are obtained in debugging conditions, and their corresponding tomographic images, vibration signals, and high-speed camera images are collected.
Section 4 analyzes the experimental findings and compares them to the findings utilizing solely ECT images. The conclusions of this effort are presented in
Section 5.
2. Methods
2.1. ECT Measurement Principle
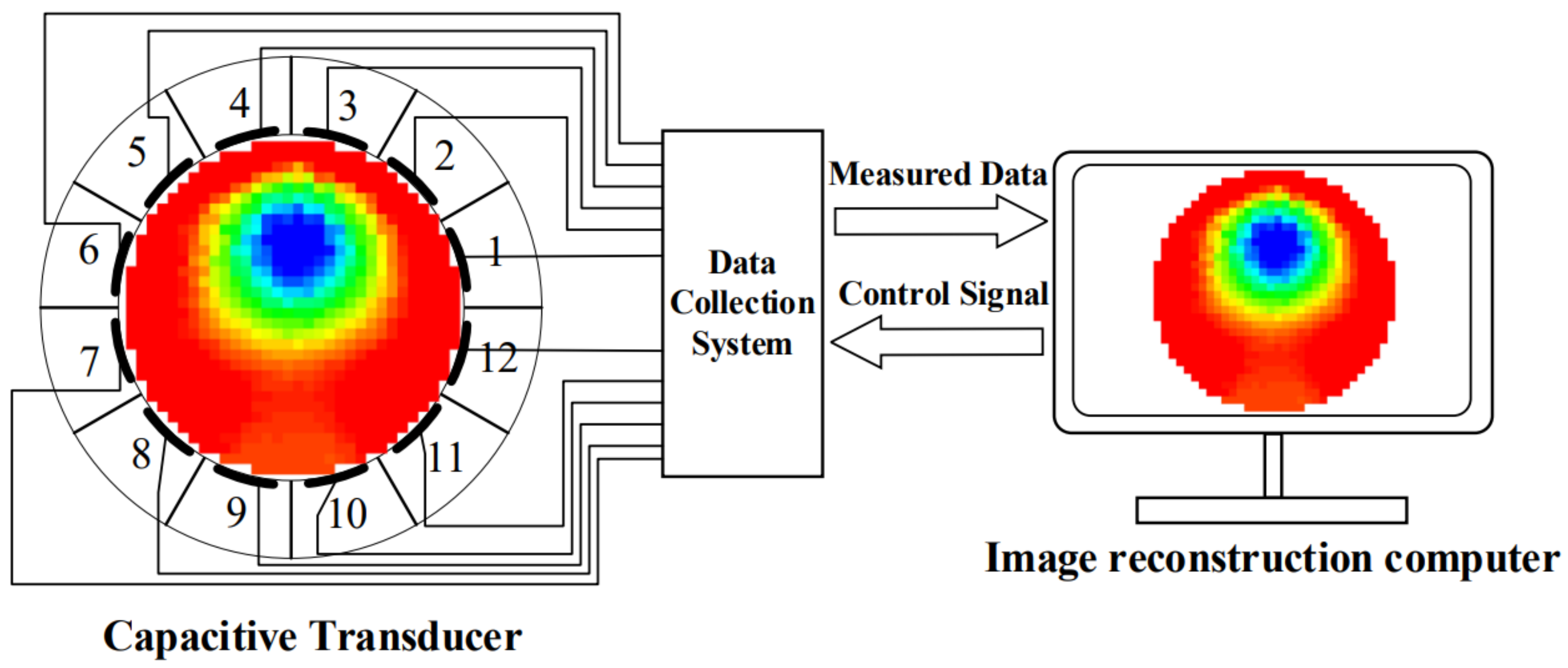
The three primary elements of a capacitance tomography imaging system are a capacitance tomography imaging sensor, a data acquisition system, and an image reconstruction system. A typical 12-electrode capacitance tomography imaging system is shown in
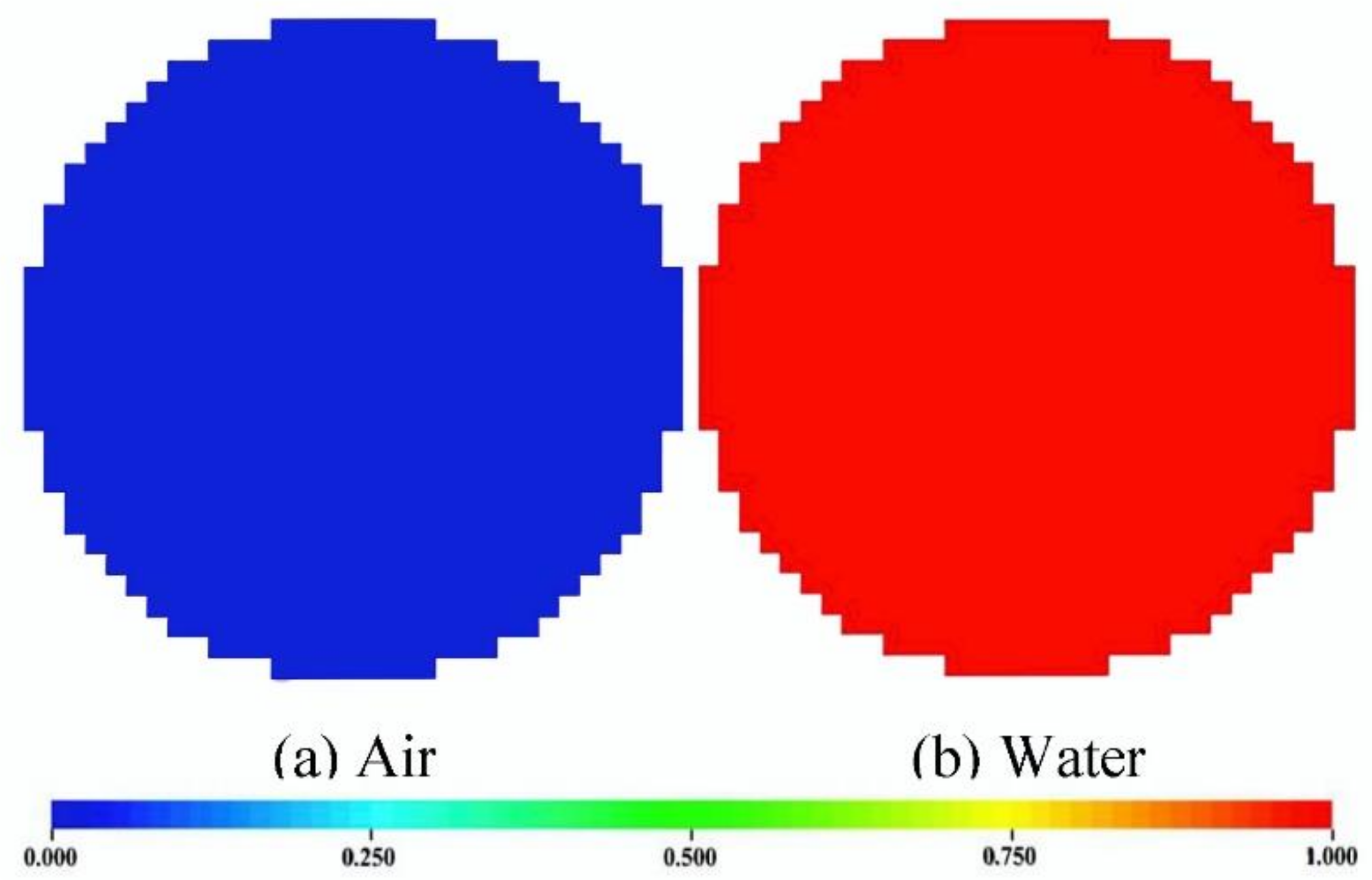
Figure 3. The capacitance chromatography imaging system measures the capacitance value inside the closed pipe based on the capacitance sensor array, and transmits it to the computer for secondary calculation after being processed by the data acquisition system, and finally the medium distribution image inside the pipe is reconstructed. The working principle is that when the medium concentration or medium distribution in the measured field changes, the capacitance sensor array detects the change in capacitance value, and the data acquisition system filters, transforms, and amplifies the capacitance value and then transmits it to the computer, which presents the projection distribution in the pipe according to the image reconstruction algorithm.
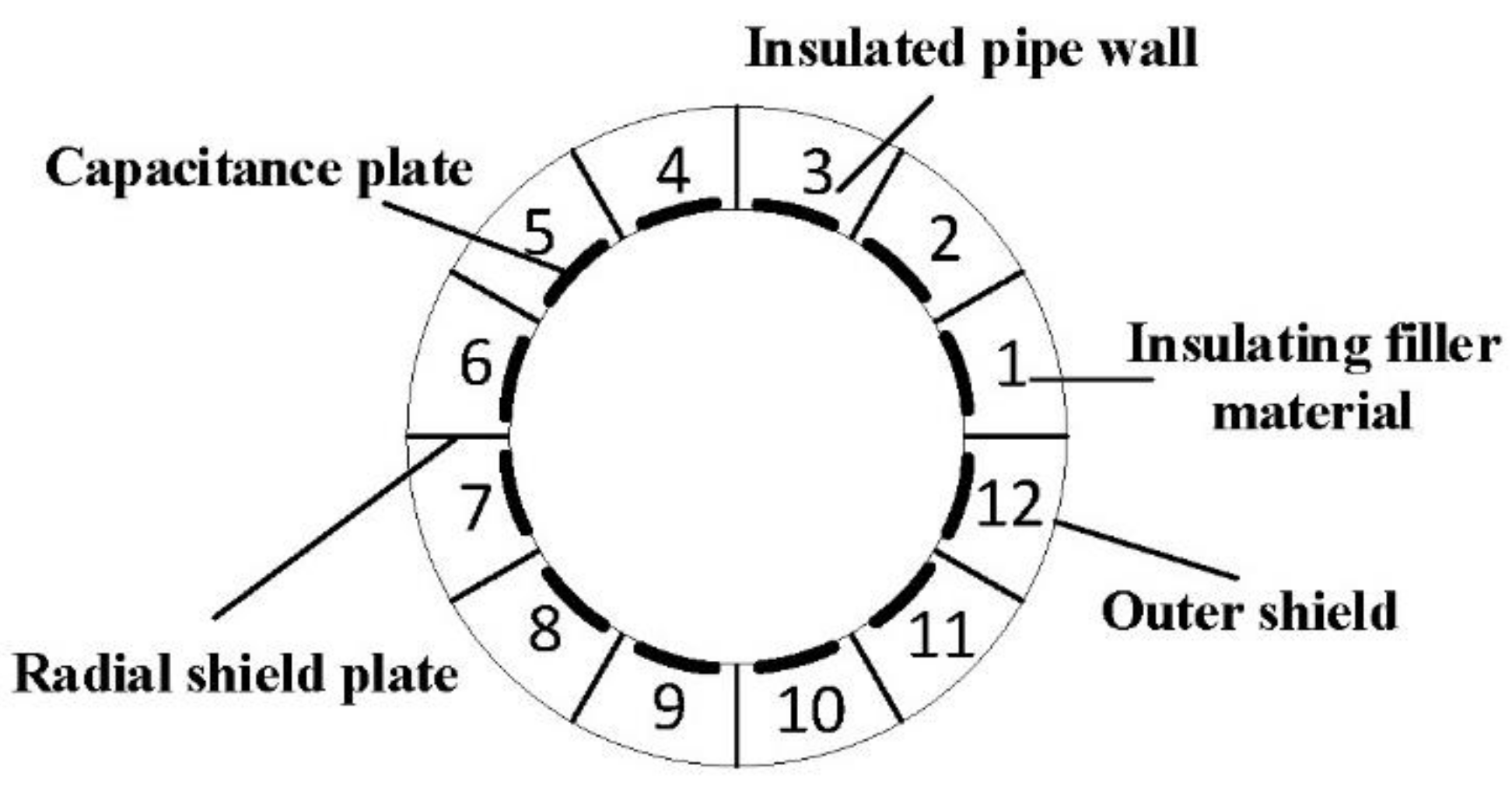
An array of ECT sensors is formed by adding electrodes uniformly on the outside of a multiphase flow pipe and applying electricity to the electrodes in turn to detect the capacitance values between the different electrodes to form the initial measurement data. Most of the current ECT capacitance sensors are 8 electrode, 12 electrode, and 16 electrode. This study is based on a typical 12-electrode ECT system, whose physical structure is shown in
Figure 4 in cross-section.
ECT capacitive sensors work with voltage excitation and capacitive output. The conventional single-electrode excitation method is used in this study. The internal electrode number of the capacitor sensor is shown in
Figure 4. In general, for an ECT system with
N electrodes,
M separate capacitance values will be accepted, and it is written as:
2.2. Mathematical Model of ECT
Assume that the volumes of the discrete and continuous phases of the two-phase flow are
and
(gas is referred to as a discrete phase in gas–water two-phase flow, and water is referred to as a continuous phase) The discrete phase’s permittivity is equal to
, while the continuous phase’s permittivity is equal to
, the discrete phase is uniformly distributed in the continuous phase, and the equation to calculate the equivalent dielectric constant ε as follows:
Thus, its capacitance value can be calculated:
where the concentration of the discrete phase is expressed as
. The equation for calculating the capacitance value shows that the phase concentration’s magnitude
β is connected to the capacitance value. There is a character constant
that determines the pole plate’s size. The effective area between the pole plates and the separation between the pole plates are some of the characteristics related to it.
Suppose that the pole plate length can be neglected in the axial direction of the tube, the phase distribution of the medium (multiphase flow) is constant in any cross-section of the tube. Ideally, the influence of the sensitivity distribution function on the medium distribution and the influence of the dielectric interference capacitance can be ignored, and the equation of capacitance
between any pair of plates in the pipeline is solved by ignoring the influence of dielectric interference capacitance.
where
, the numbering meaning is as defined above,
stands for pipe section, the dielectric constant of the medium at a particular spot is represented by the medium distribution function
in the pipe section, which represents the sensitivity function within the pipe.
is the sensitivity distribution function of the capacitor. In the 12-electrode ECT system, each pair of poles can measure 66 independent capacitances, represented by a 66-dimensional vector
, and a sensitivity distribution function is associated with each capacitance value
. According to (5), we can obtain Equation (6).
From Equation (6), it is clear that the goal of the ECT system’s image reconstruction is known and to solve for , and then use the medium distribution to rebuild the original flow pattern’s image.
Among them, one of the earliest and presently most popular basic imaging methods is the linear back projection technique, which is used by this ECT system. It determines the density value at that location in the pipe by adding up all of the projected rays there and then inverting them [
17]. The matrix form of the linear inverse projection is shown in Equation (6):
2.3. Convolutional Neural Network
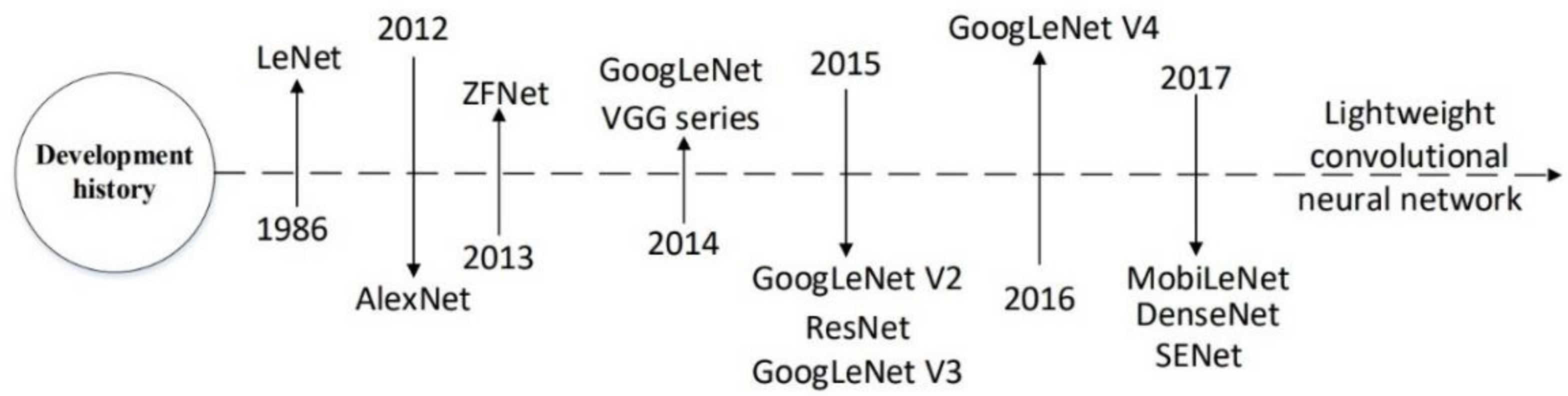
A convolutional neural network (CNN) is an effective feed-forward neural network with complex structure and convolutional computation. LeCun et al. [
18] invented the CNN deep learning algorithm in 1998, and the gradient algorithm was used to optimize the model. There are many typical network models, such as LeNet, AlexNet, VGGNet [
19], ResNet [
20], GoogleNet [
21], etc. The development history of network models is shown in
Figure 5. In the areas of target recognition, semantic segmentation, and image classification, CNN has so far produced several ground-breaking research findings.
Shared weights, pooling, and sparse concatenation are three ways that CNN differs from other deep learning algorithms (also known as local acceptance domain). It lessens dimensional sampling, lessens the dimensionality of the data in time and space, uses fewer training parameters, simplifies the network, and successfully prevents algorithm overfitting [
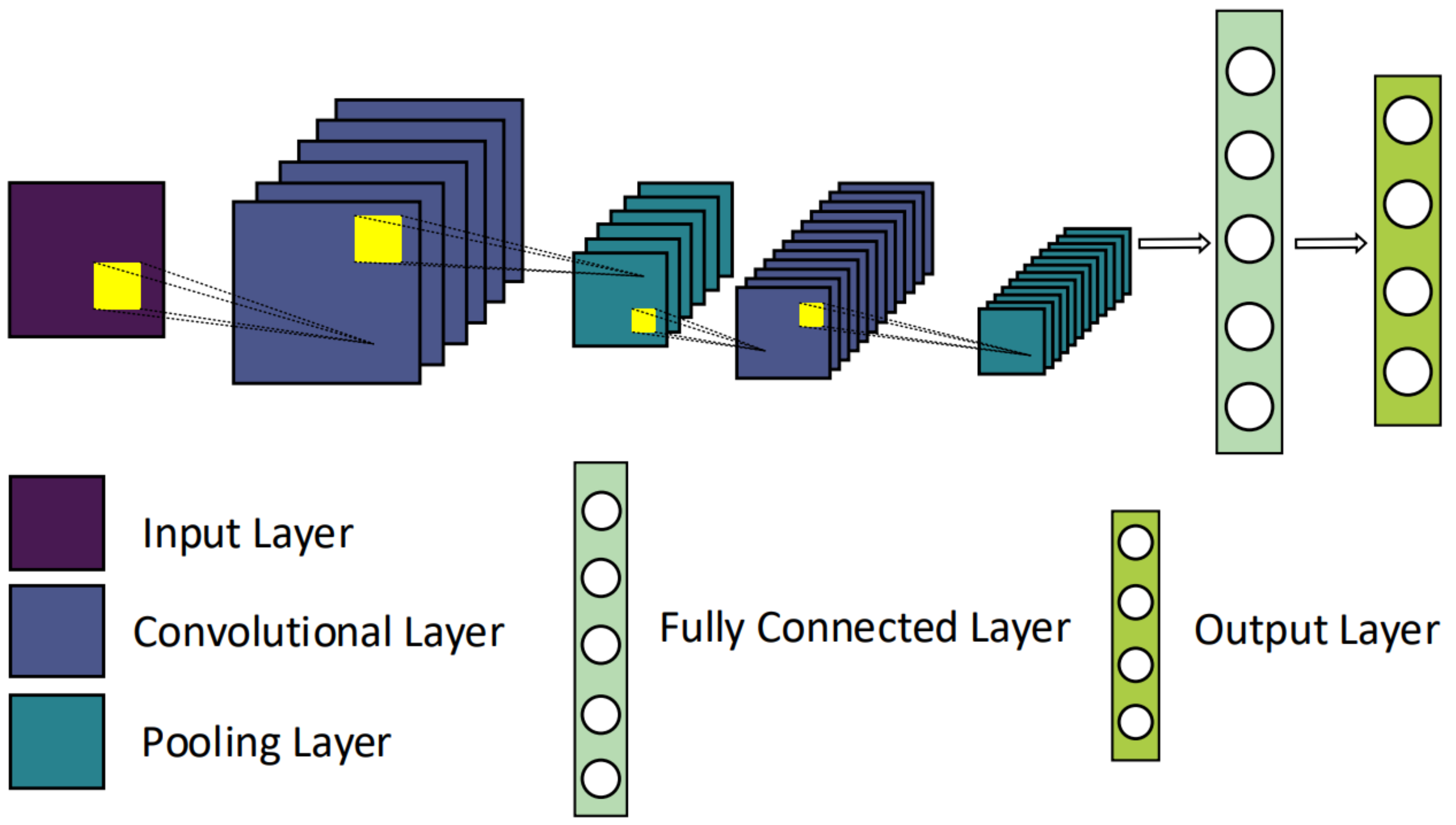
22]. The classification recognition model of CNN mainly consists of feature extraction of input data through convolutional and pooling layers, classification recognition by combining features and classifiers through fully connected layers. The topology of the traditional convolutional neural network model is represented by the input layer, convolution layer, pooling layer, fully connected layer, and output layer, as shown in
Figure 6. Convolutional layer, activation layer, and pooling layer repetition increase the network depth, which is the fundamental element of CNN. The convolutional layer uses multiple convolutional kernels to achieve enhancement, noise reduction, and feature extraction of images using a variety of approaches. The pooling layer, also known as downsampling, speeds up algorithm computation by extracting feature values, reducing the complexity of the computational network, and processing fewer data overall [
23]. The basic modules that implement CNN’s feature extraction function are the convolutional and pooling layers [
24].
2.4. Feature Fusion
Piezoelectric acceleration sensors and tomography pictures are combined after features are extracted. To this end, we calculated the feature vectors of the data collected by different sensors (i.e., vibration signals and ECT images). We spliced the single feature vectors in the data, which involved the same type in obtaining a new feature vector.
The feature vector is rich in feature information and can better identify flow patterns than the feature vector from information from a single sensor. In feature layer fusion, the key is to balance the feature vectors extracted from multiple sensor data. Multiple feature vectors have to balance in order to allow fused features to have the same numerical scale and length. Therefore, applying the min–max normalization technology [
25] to the obtained feature vectors and then joining them to synthesize a single vector is used. This approach aims to modify the individual feature vectors’ value ranges while converting those values into a fresh set of features with the same numerical scale. According to the formula in (7), the min–max normalization strategy preserves the original fractional distribution and converts the values to a standard range [0, 1].
where
is the value to be normalized,
is the normalized value,
denotes the function that generates
,
and
denote the minimum and maximum values of
for all possible values of
, respectively.
The size of the data feature vector acquired by the piezoelectric accelerometer for each vibration signal data is fixed; conversely, the feature vector of the ETC laminar imaging image is extracted. Firstly, it is necessary to ensure that the two types of signal data set input to the network model are consistent in number and keep the correspondence in the signal. Secondly, the two types of signal data feature sets are convolved, pooled, normalized, and processed through other series of operations to ensure that the feature vectors of the two signal data types have the same length. Finally, the feature vectors are connected for fusion.
2.5. Construction of Neural Network Based on Multi-Sensor Information Fusion
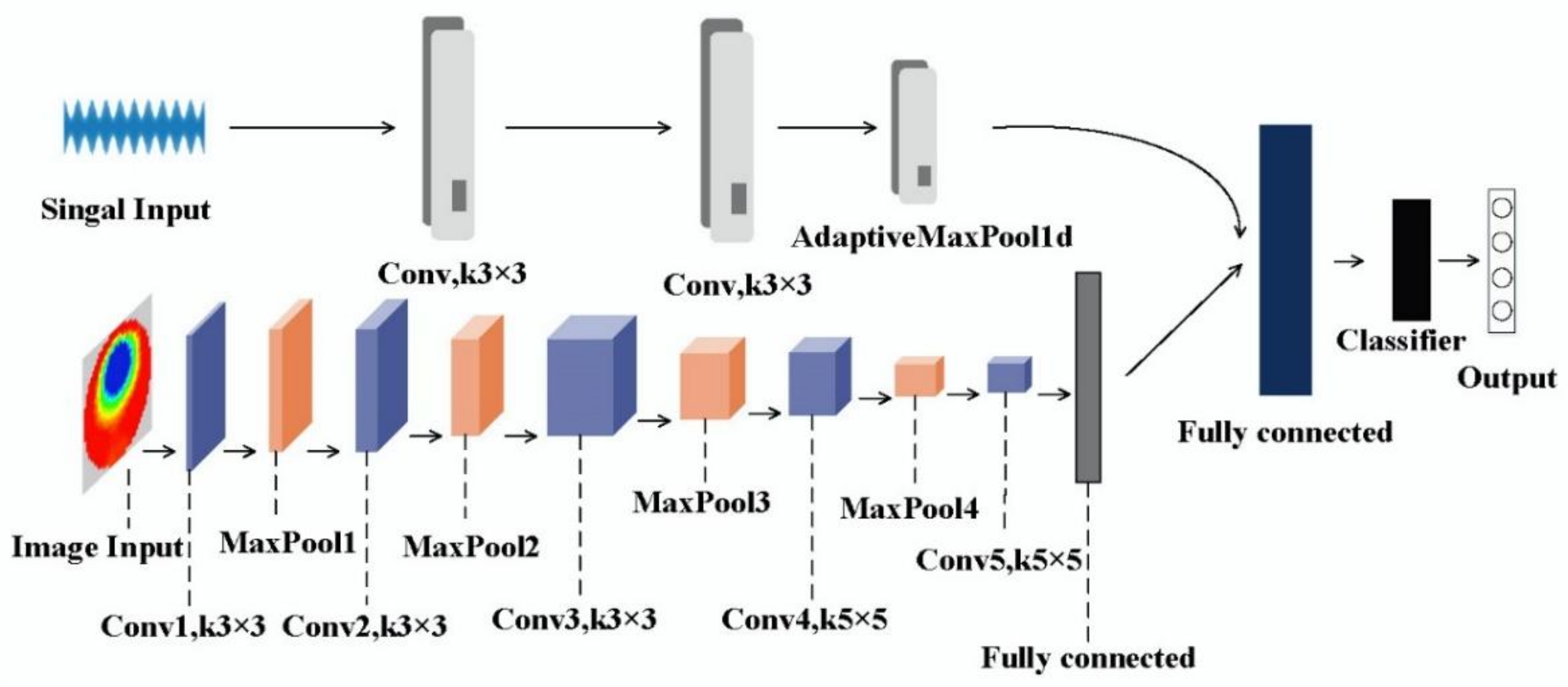
Two channels form the proposed convolutional neural network for flow pattern detection based on multi-sensor information fusion feature extraction of data samples collected by different sensors performed parallelly for the same flow condition, and then the extracted features from each channel are fused to achieve flow pattern recognition across the receiver two-phase flow using a classifier.
The proposed convolutional neural network model for multi-sensor feature fusion is divided into two channels. One channel is used to extract vibration signal features, and mainly consists of two convolutional layers, i.e., an adaptive pooling layer and a flattening layer. The batch normalization (BN), Leaky ReLu activation function, and one-dimensional convolutional module (Conv1d) are all included in the convolutional layer. The other channel is utilized to extract the ETC tomography image characteristics, which consist of five convolution layers, i.e., four maximum pooling layers and one fully connected layer. The convolutional layers include a two-dimensional convolutional module (Conv2d), batch normalization (BN), and ReLu activation function. Subsequently, the vibration signal features under different labels are first fused by concatenating, and then the fused signal features are combined with the picture features, and the flow patterns are classified by the fully connected layer, flatten layer, and sigmoid function. Weight variables that the convolutional neural network learned are trained to perform deep learning on the experimentally obtained data set.
Figure 7 depicts the structure of the model. Four neurons represent the four most prevalent flow patterns: stratified flow, slug flow, annular flow, and bubbly flow in the classification layer at the bottom of the model.
It is found that the multi-sensor feature fusion convolutional neural network model proposed in the subsequent comparison with other models greatly improves the flow pattern identification accuracy of the M-type subsea jumper, and the model has strong robustness, which has engineering application research significance for the influence of flow-induced vibration on the service life of the subsea jumper.
To achieve stream-type recognition, the classification layer employs the sigmoid function as a classifier to determine the probability distribution of successfully identifying various training samples. The following is the formula for the sigmoid activation function:
The function used as input, the sigmoid function is continuous everywhere, and the data can be compressed with constant amplitude to facilitate forward propagation.
2.6. Evaluation Index
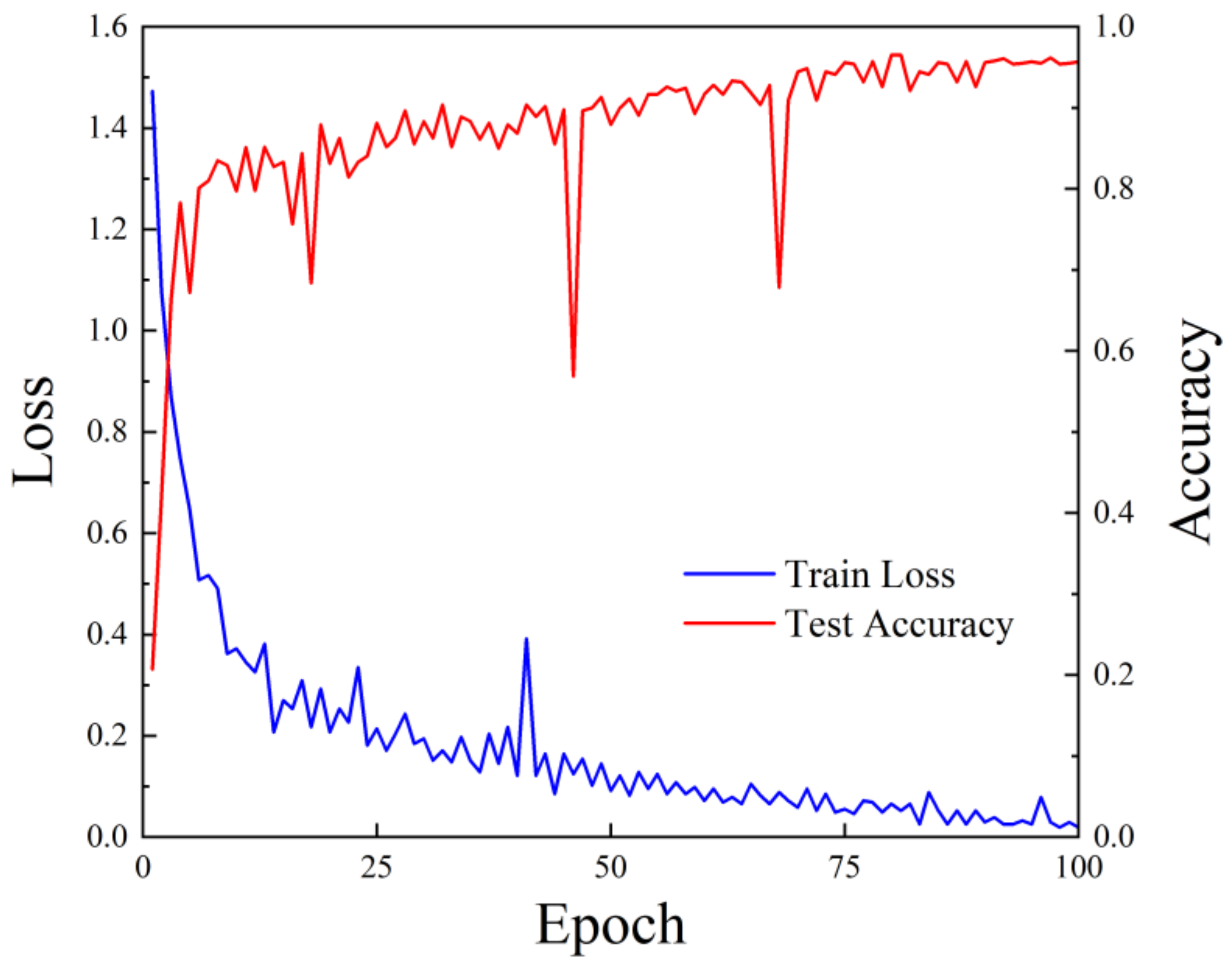
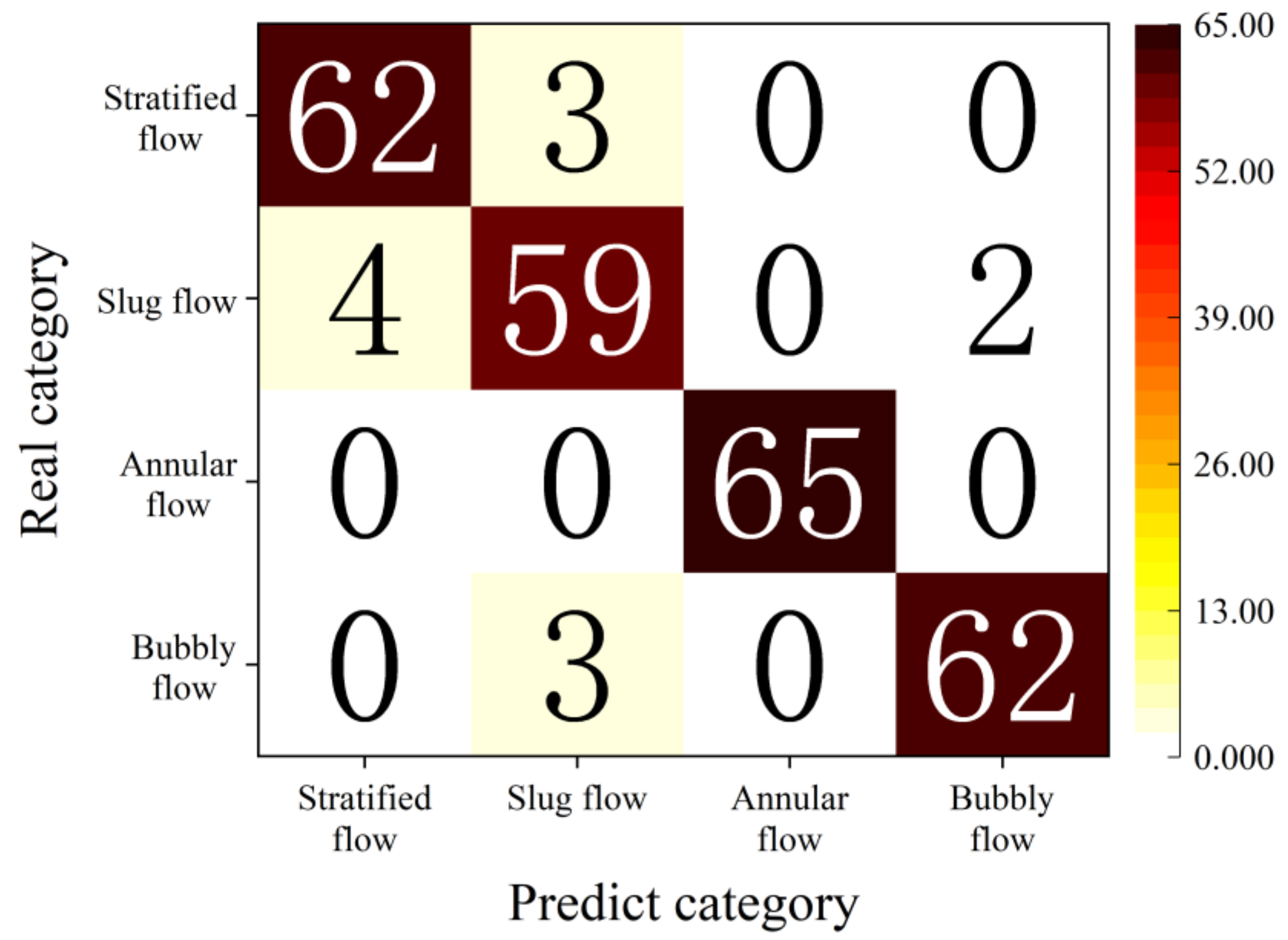
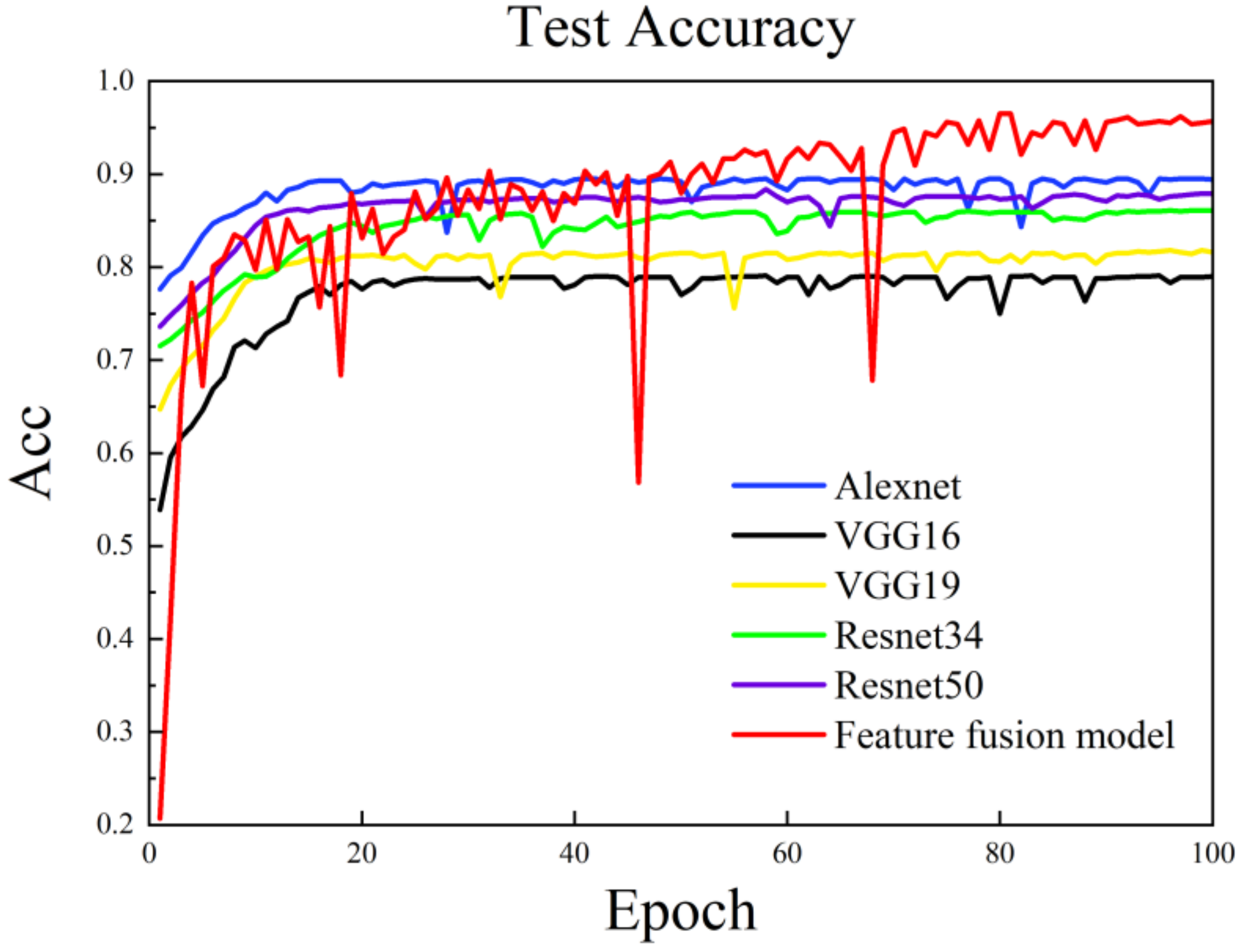
In this paper, loss function, accuracy, and confusion matrix are used to evaluate the recognition results. The loss function curve and test accuracy curve obtained by machine learning training can intuitively understand the recognition accuracy of the model. The confusion matrix compares the real value and predicted value of the fusion sample and visually presents the result through the matrix, so as to measure the robustness of the diagnostic model more comprehensively.
The cross entropy loss function is the loss function employed in this study, and minimizing it is the CNN model’s training target:
where
denotes the actual label of the
ith sample as
k, with a total of
K label values and
N samples, and
denotes the concept of the
ith sample predicted as the kth label value. By fitting this loss function, the inter-class distance is also increased.
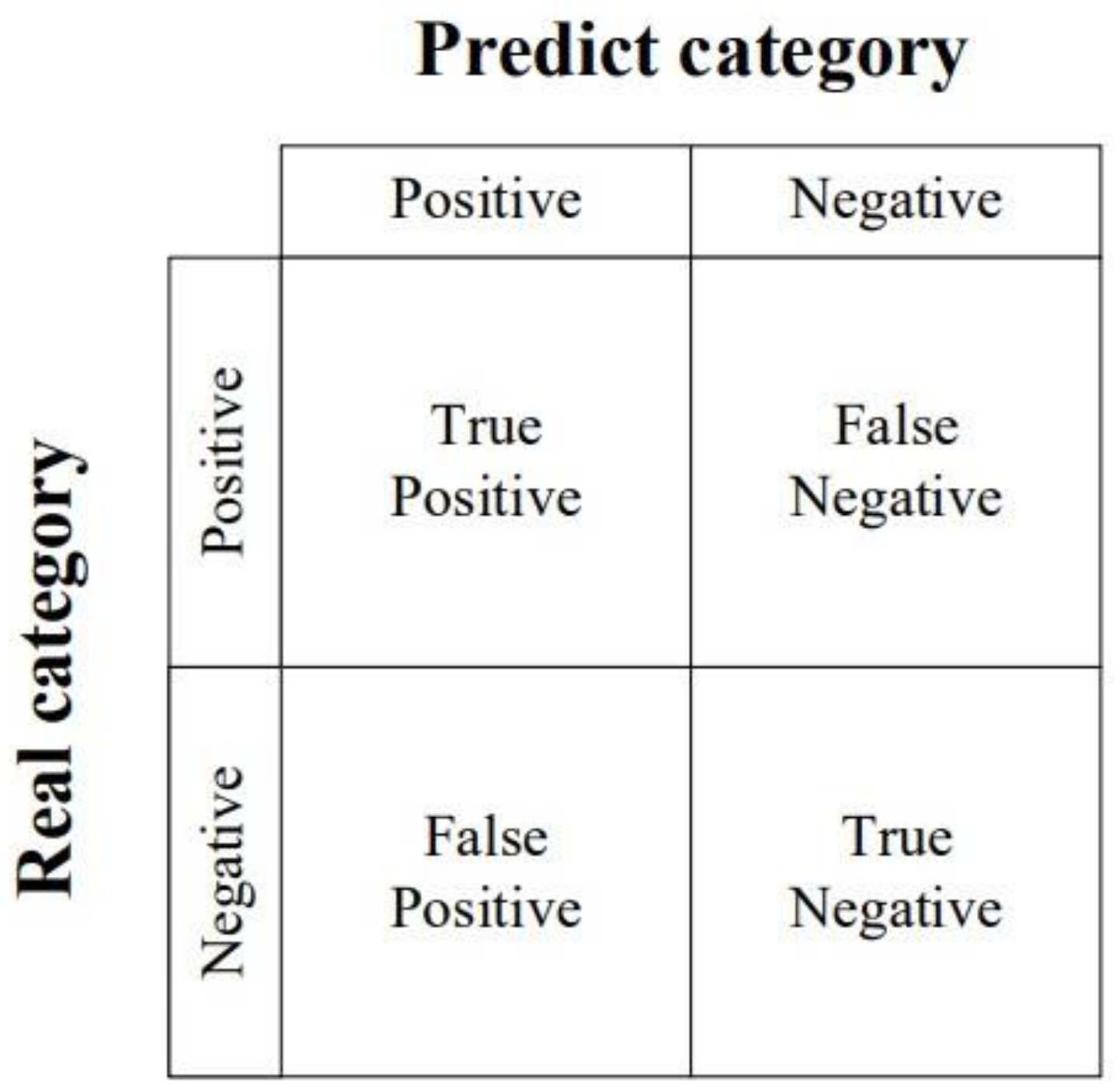
In the field of machine learning, a confusion matrix is a visual tool that is specifically used for supervised learning. In the evaluation of image recognition accuracy, it is mainly used to compare the classification results, as shown in
Figure 8. True positive (
TP) represents the sample that is actually positive and predicted to be positive; false negative (
FN) represents the sample that is actually positive but predicted to be negative; false positive (
FP) represents the sample that is actually negative but predicted to be positive; and true negative (
TN) represents the sample that is actually negative and predicted to be negative.
Accuracy rate is the most commonly used classification performance index, which can be used to represent the accuracy of a model. The specific expression of accuracy is:
5. Conclusions
This research proposes a multi-sensor feature fusion method for the identification of two-phase flow patterns in a subsea M-type jumper. The experimental tests were conducted at Dalian Maritime University’s multiphase flow laboratory. In the test, flow rates were controlled to generate four different flow patterns: stratified flow, slug flow, annular flow, and bubbly flow. The obtained signals from two different sensing modalities, vibration and capacitive laminar imaging, are used to improve the accuracy issue of single-sensor testing with a single perspective and incomplete information. The proposed model merges their extracted features in a supervised machine learning approach to identify flow patterns. As compared to the model only employing ECT image data to determine flow patterns, the suggested method has a high identification accuracy of 95.3%, according to detailed experimental results.
This study combines machine learning and two different types of sensor information to identify flow patterns, and directly inputs the flow pattern information into the neural network, which simplifies the extraction of features and improves the experimental efficiency. It overcomes the lengthy feature extraction procedure and incomplete feature information in the traditional flow pattern identification approach, which is important for the design and operational effectiveness of underwater production systems as well as the safety.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}