
Research on Efficient Operation for Compound Interchange in China from an Auxiliary Lanes Configuration Aspect


Abstract
:1. Introduction
2. Literature Review
2.1. Problems in Small Spacing Distance Interchange
2.2. Small Spacing Interchange Improvement Methods
2.3. Summary
3. Problem Statement and Data Collection
3.1. Problem Statement
3.2. Influential Factor Analysis Based on AHP
- (1)
- Establishing the Hierarchy Structure Model
- (2)
- Constructing the Judgement Matrix
- (3)
- Consistency test
- (4)
- Calculate the weight matrix.
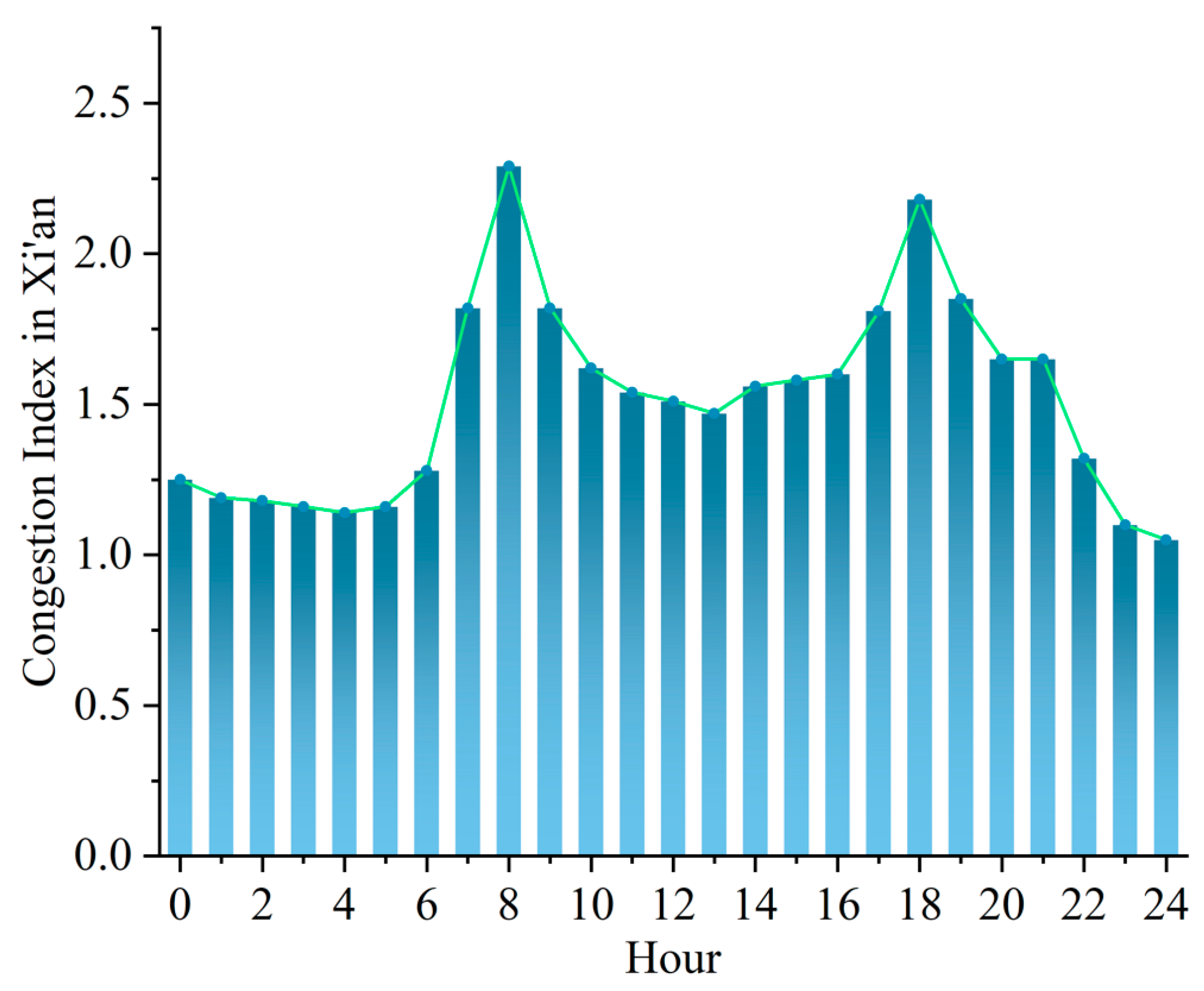
3.3. Data Collection
- Traffic volume on the mainline, entrance ramp, and exit ramp;
- The ratio of vehicle types on the mainline and ramps;
- The lane widths of the mainline and ramps and the auxiliary lanes’ length.
- Trucks are restricted to the outermost lane due to the mainline lane splitting restriction;
- The proportion of diverging is 51.44%, which is quite large, even larger than the proportion of straight traffic, and the proportion of emerging is 20.33%;
- The proportion of trucks is small, only about 7%.
4. Design Scheme and VISSIM Simulation
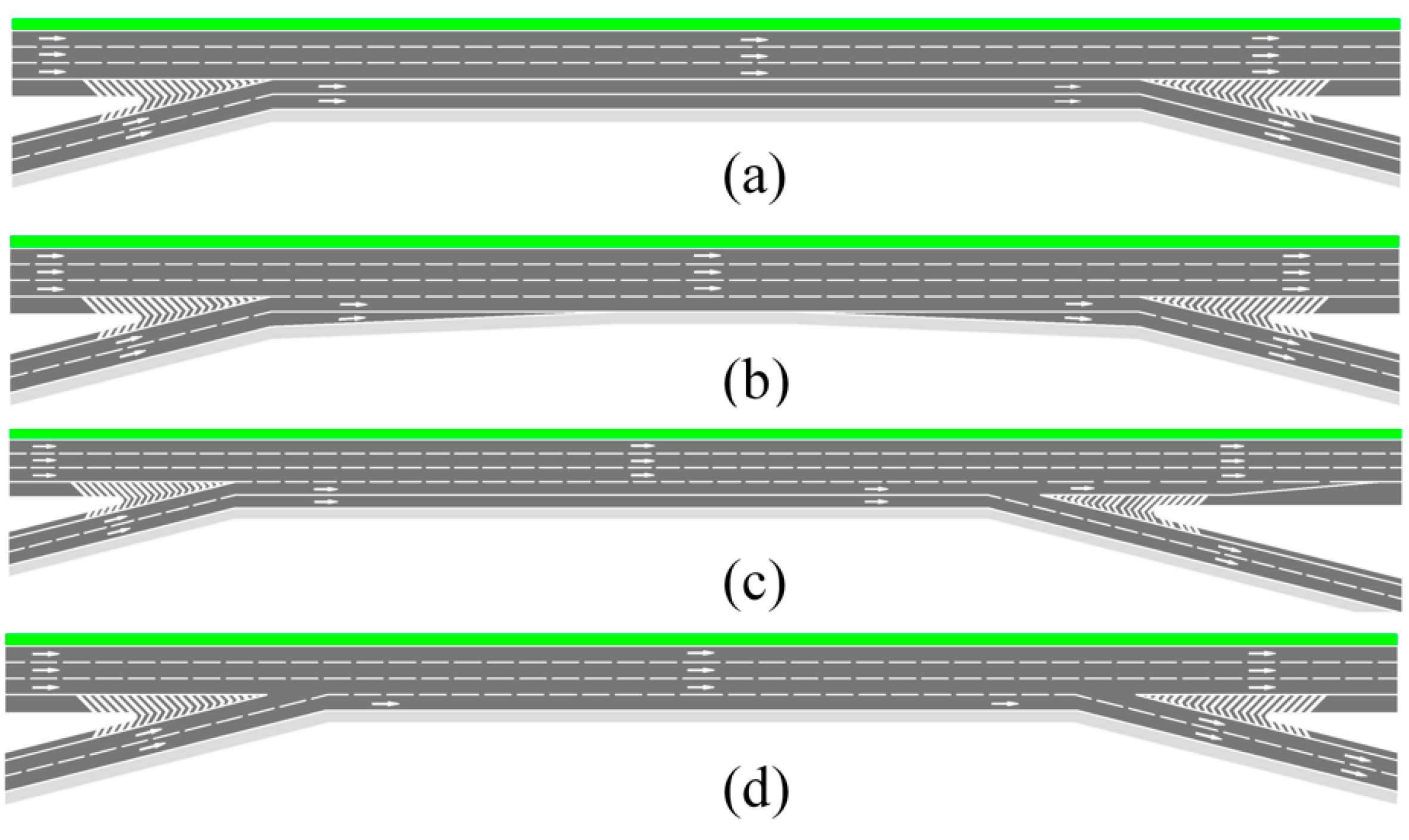
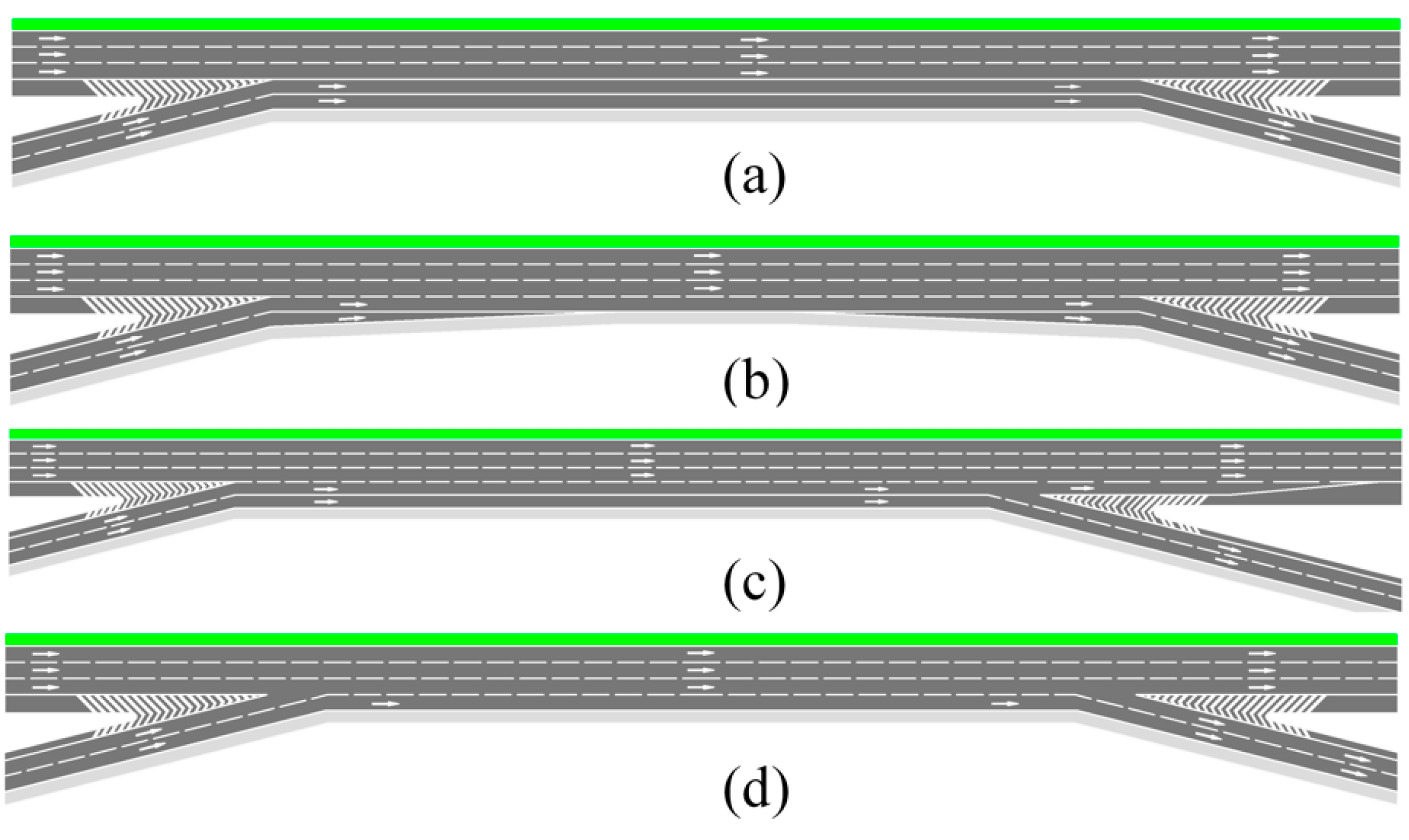
4.1. Design Scheme
- Scheme 1: Current Baqiao–Tianwang Interchange Design Scheme
- Scheme 2: Tapered Auxiliary Lanes
- Scheme 3: Extend Auxiliary Lanes
- Scheme 4: B-type Weaving Auxiliary Lanes
4.2. Establishing the Model
4.3. Calibration of the VISSIM Simulation Model
4.4. Operational Efficiency and Environmental Assessment
4.4.1. Selection of Evaluation Indexes
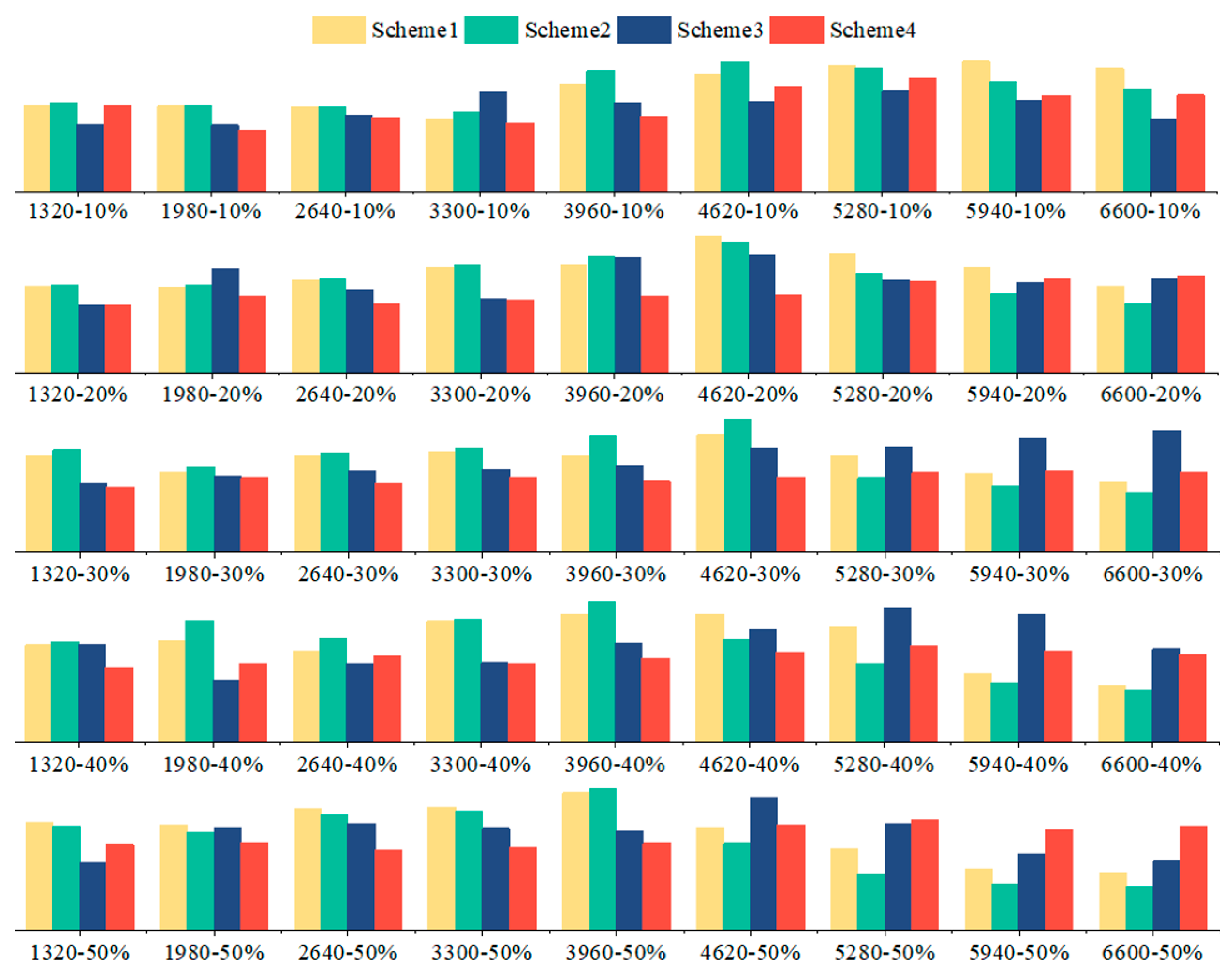
4.4.2. Analysis of Simulation Results
4.5. Safety Evaluation
4.5.1. Selection of Evaluation Indexes
4.5.2. Analysis of Simulation Results
5. Sensitivity Analysis
5.1. Sensitivity Factors Determination
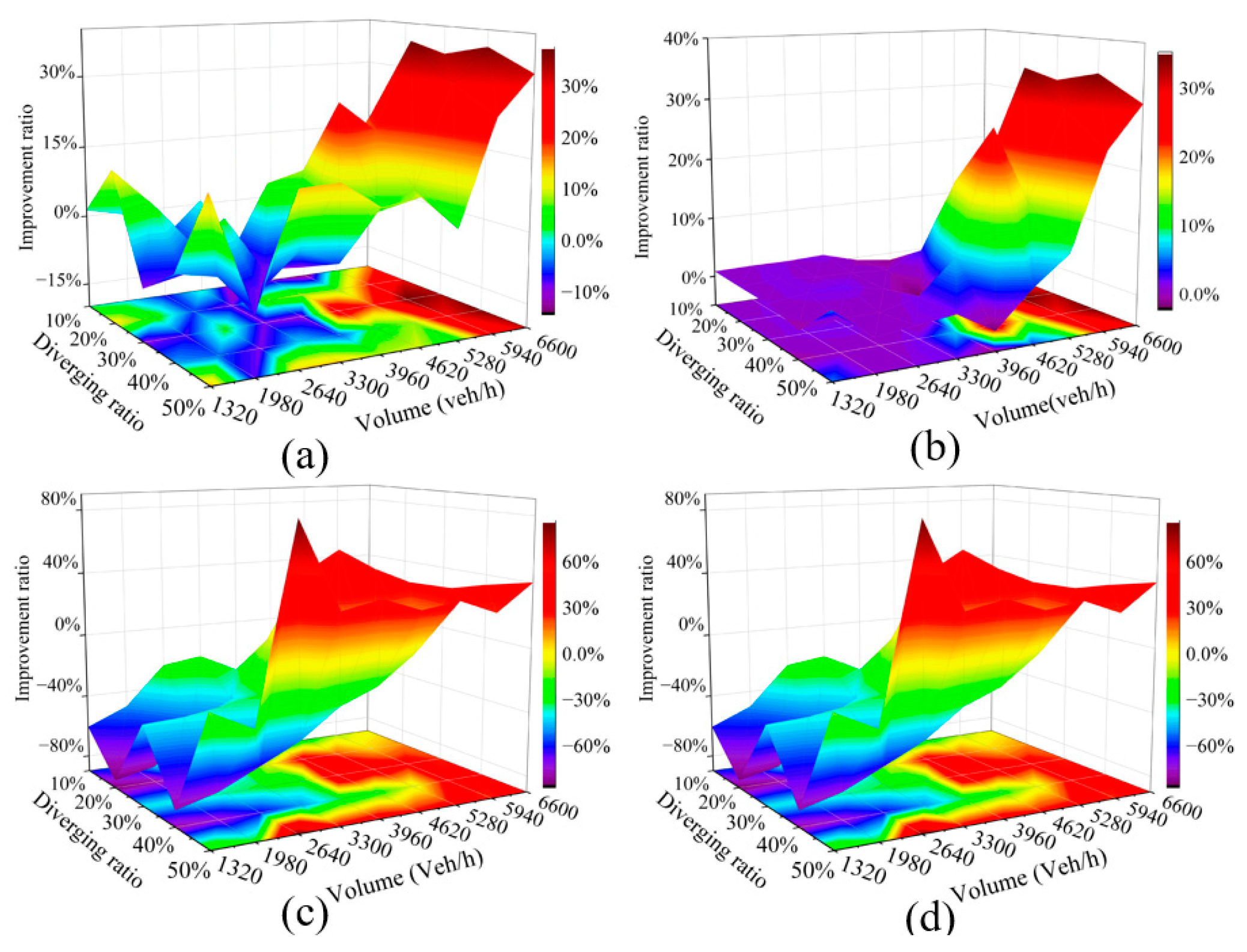
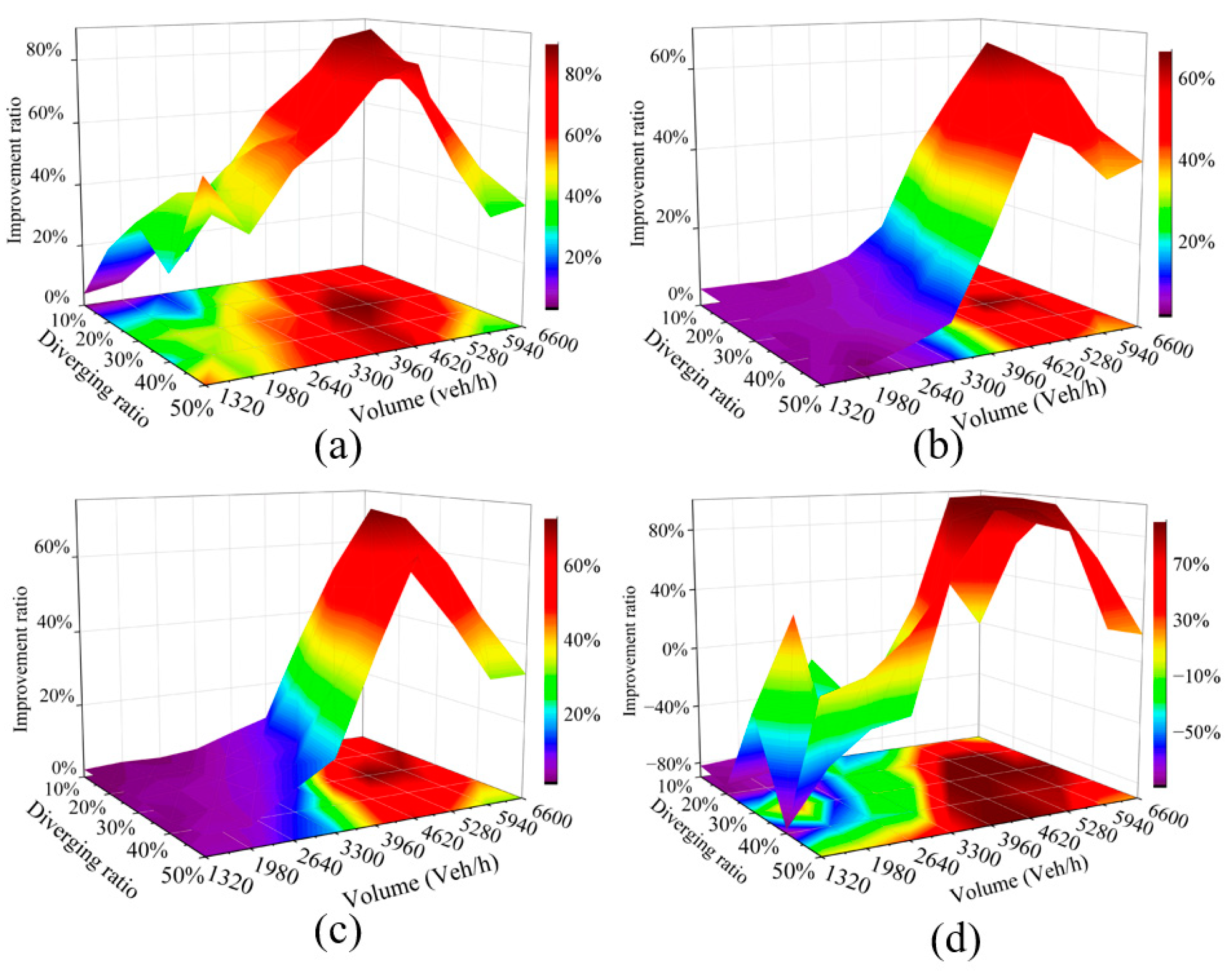
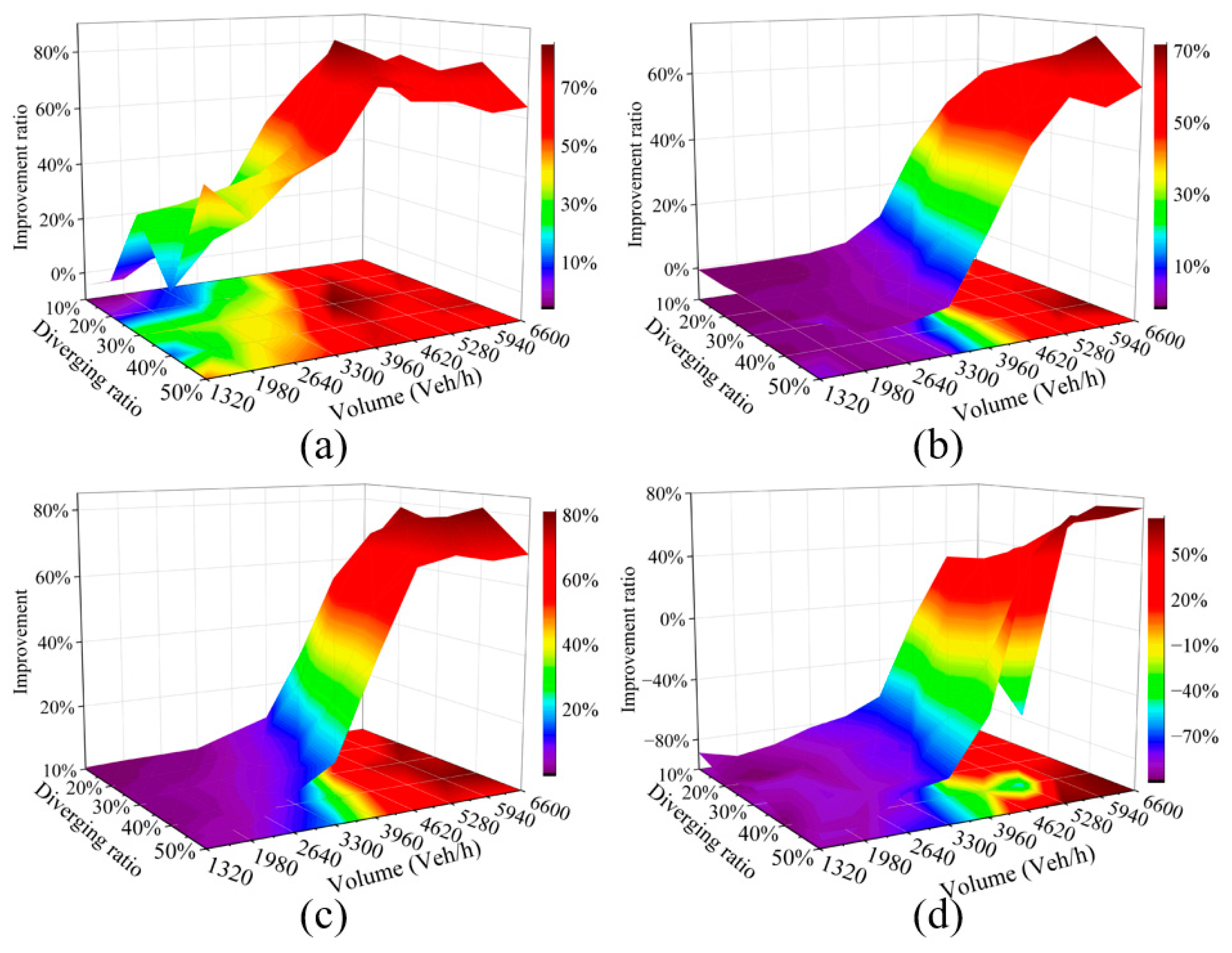
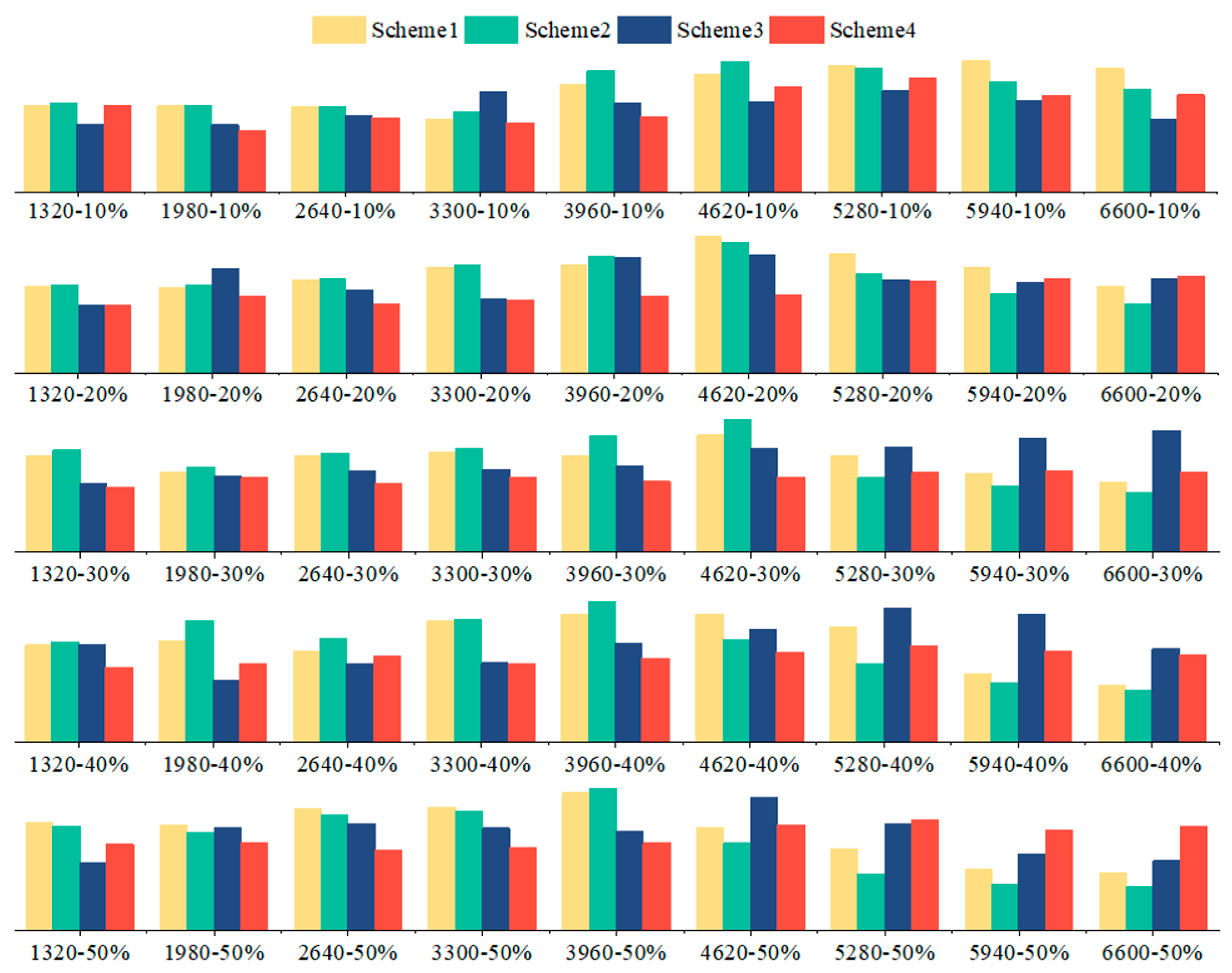
5.2. Sensitivity Analysis Results
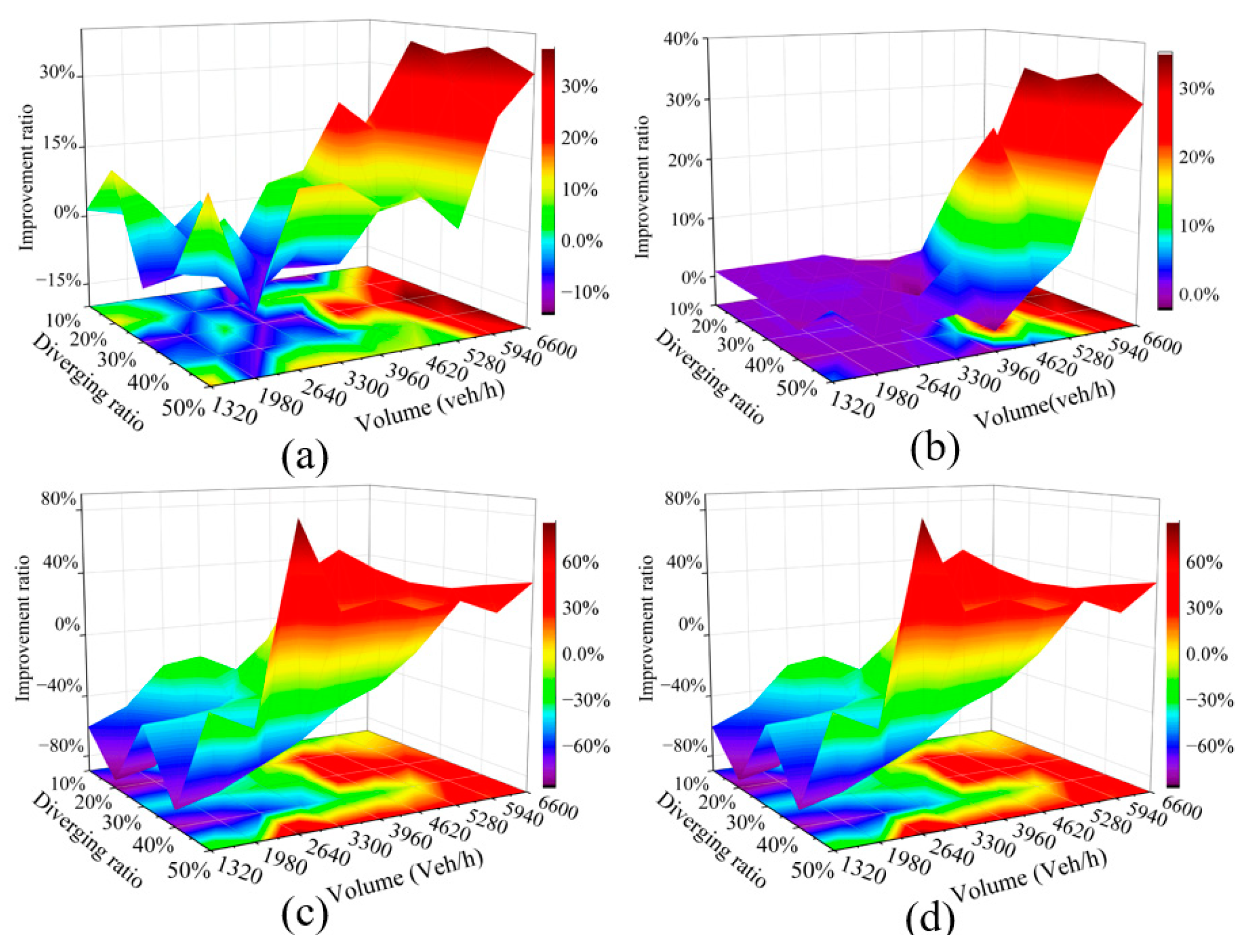
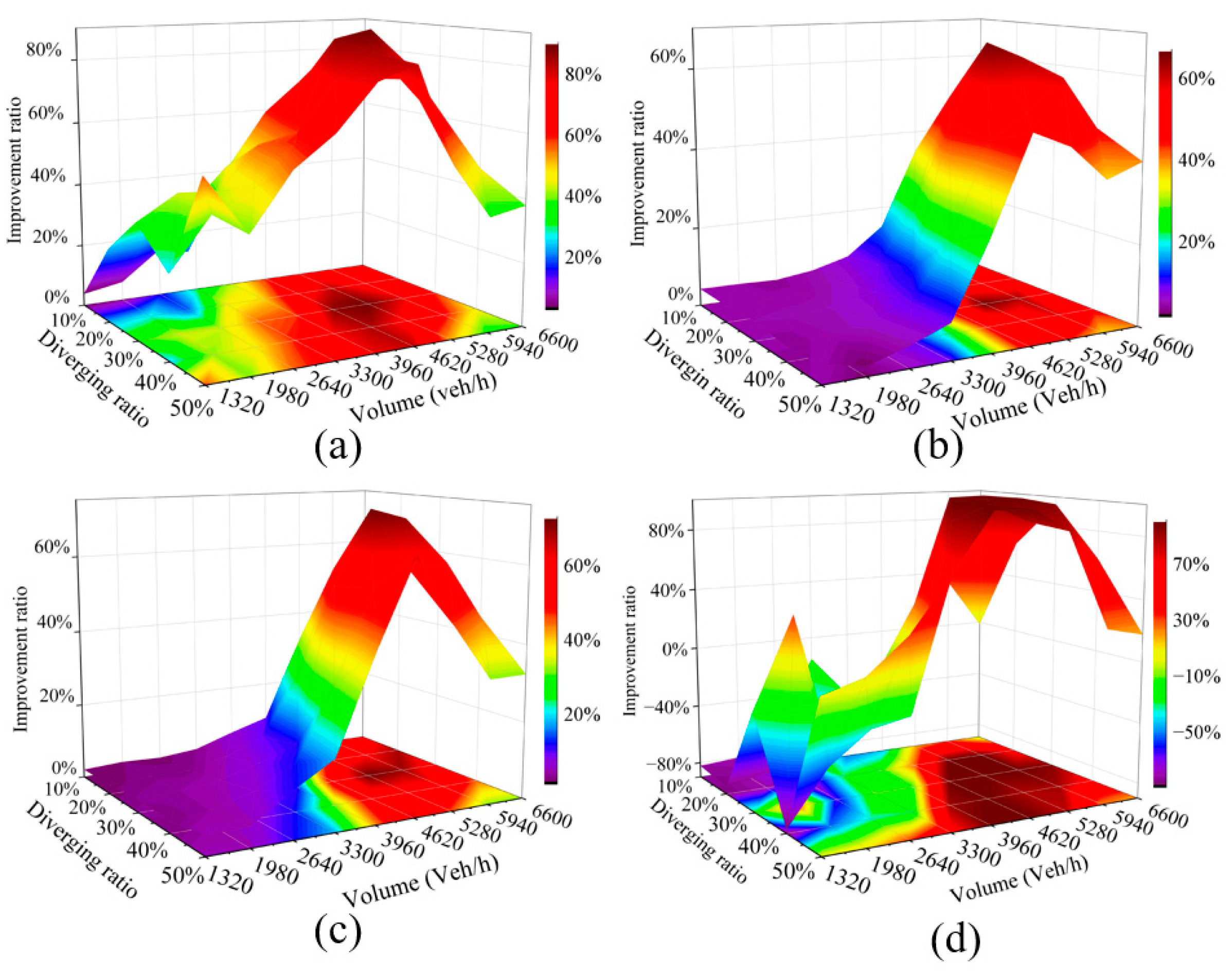
- Comparison of Scheme 2 and Scheme 1
- Comparison of Scheme 3 and Scheme 1
- Comparison of Scheme 4 and Scheme 1
6. Comprehensive Analysis Based on the FAEWM
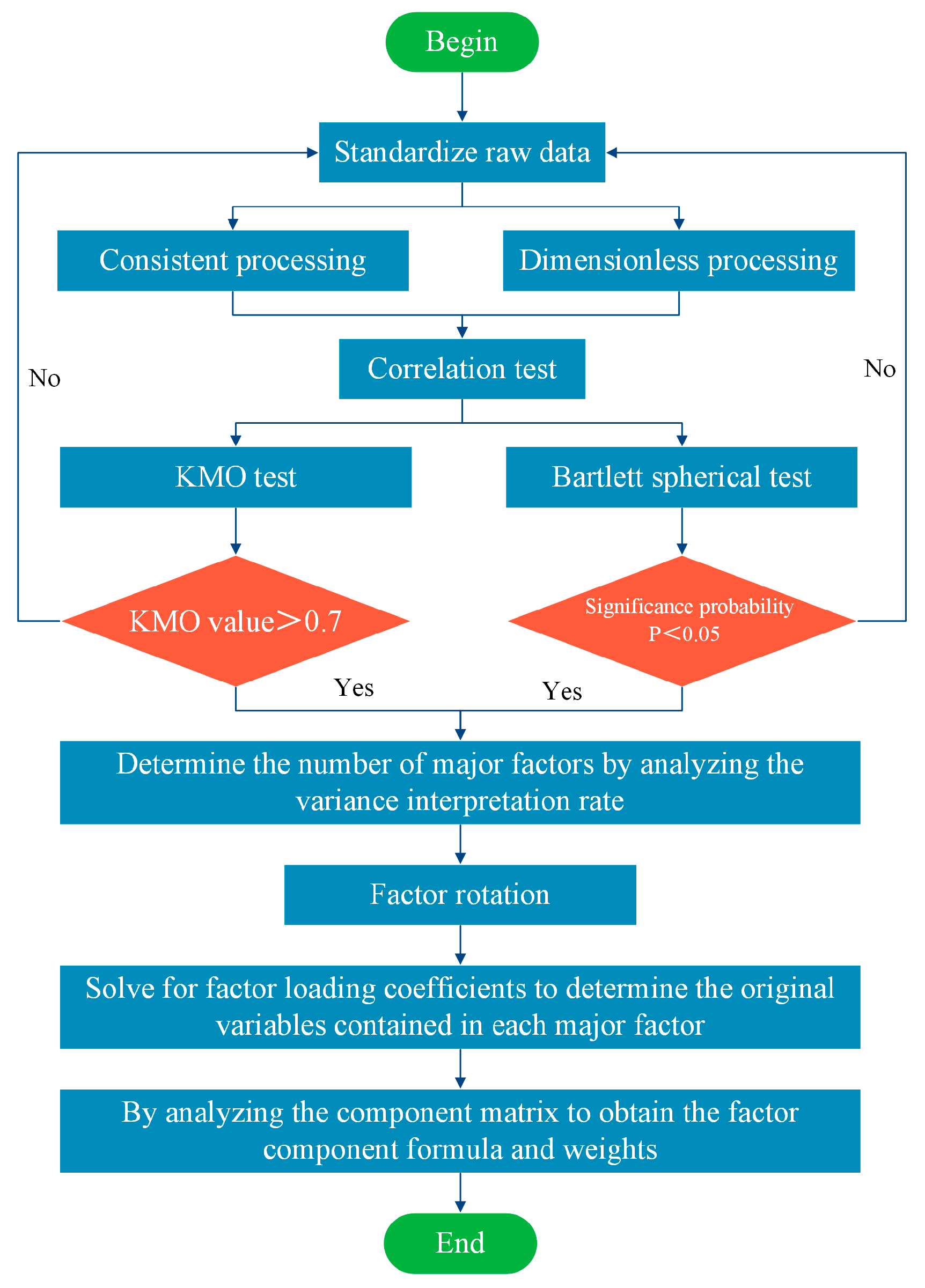
6.1. Determination of Weights Based on the Factor Analysis Method
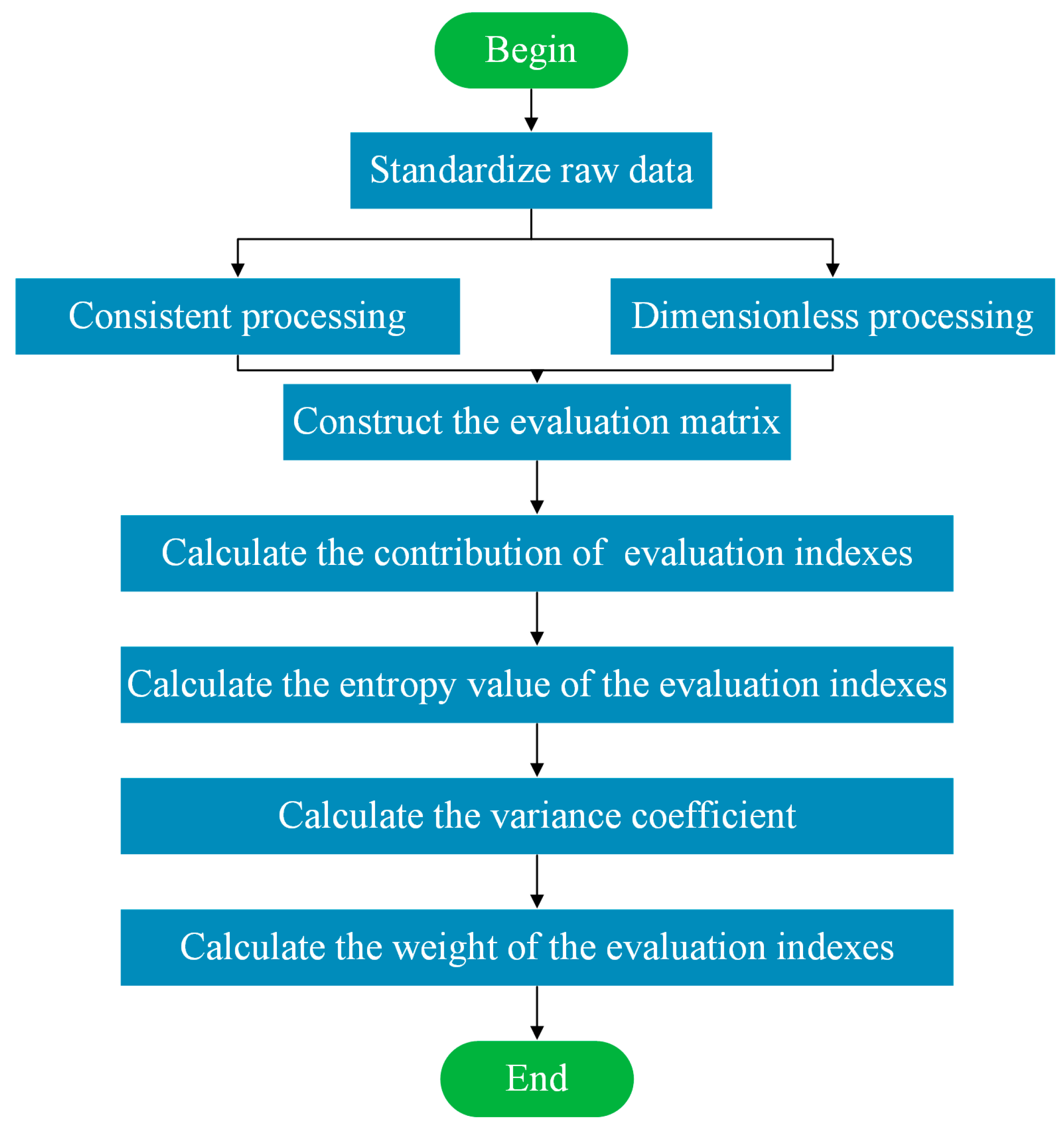
- Consistent processing
- Dimensionless processing
- KMO test
- Bartlett’s test of sphericity
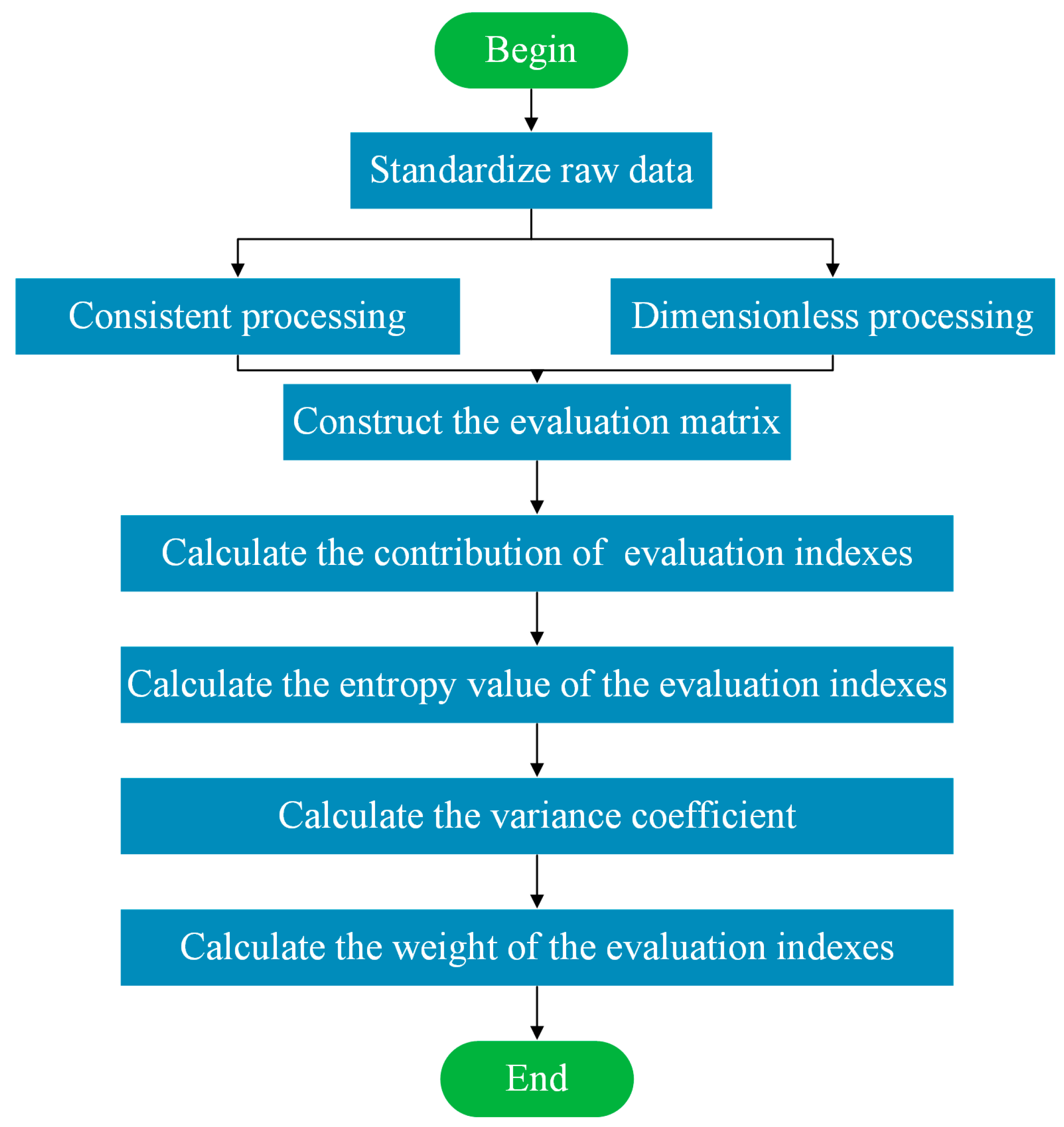
6.2. Determination of Factor Weights Based on the Entropy Method
6.3. Determination of Evaluation Index Weights
7. Results and Discussion
7.1. Discussion of the Calculations Results
7.2. Discussion of Computational Modeling Applications
7.3. Validation of the FAEWM
8. Conclusions
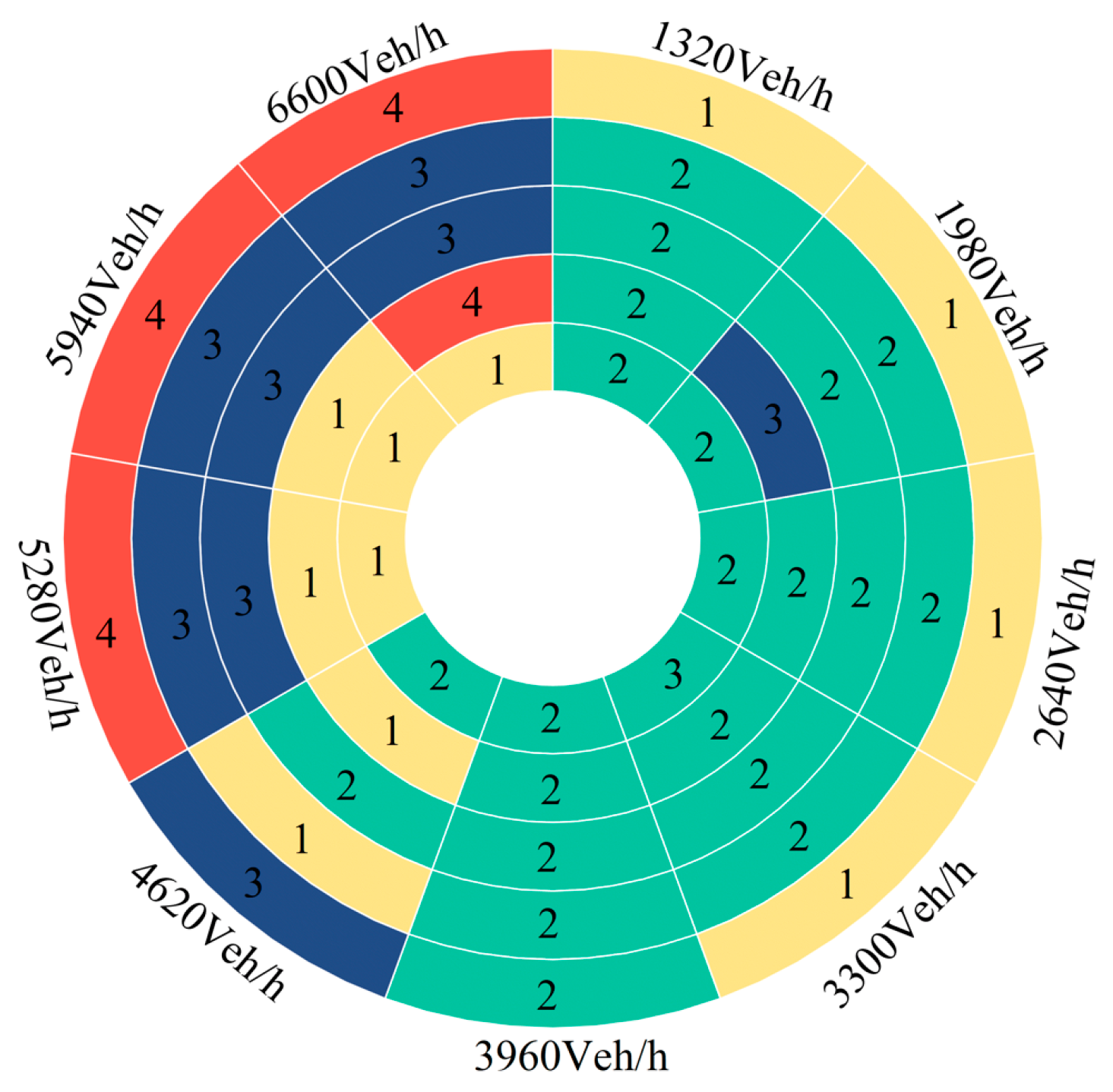
- The auxiliary lanes of Scheme 1 were most effective under specific traffic conditions. When the traffic volume was less than 3960 veh/h, the diverging–emerging ratio was higher than 40%; when the traffic volume exceeded 3960 veh/h, the diverging-emerging ratio was 10–20%. However, in practice, the score gap between Schemes 1 and 2 is so small that they can be substituted for each other at low traffic volumes and low diverging–emerging ratios;
- Scheme 2 had the most advantages under low traffic volume and diverging–emerging ratio. Specifically, when the traffic volume is below 3960 veh/h and the diverging–emerging ratio is 10–40%, opting for Scheme 2 as the auxiliary lane form is recommended. This scheme proved to be adaptable and suitable for a wide range of traffic situations. In addition, its unique design can save much land and has good adaptability in terrain-restricted areas;
- When the traffic volume surpasses 3960 veh/h, and the diverging–emerging ratio exceeds 20%, it is advisable to select Scheme 3 as the preferred auxiliary lane form;
- The Scheme 4 B-type weaving area has the worst safety. This design leads to the inner ramp vehicles emerging directly into the mainline, interfering with straight vehicles and generating many conflicts. The more vehicles in the inner lanes of the ramp, the more serious the interference;
- The environmental impact of different types of auxiliary lanes varies greatly, up to 81.05%. A reasonable choice of auxiliary lane form is conducive to improving the environment.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- MunOz, J.C.; Daganzo, C.F. The bottleneck mechanism of a freeway diverge. Transp. Res. Part A Policy Pract. 2002, 36, 483–505. [Google Scholar] [CrossRef]
- Sarhan, M.; Hassan, Y.; Halim, A.O.A.E. Safety performance of freeway sections and relation to length of speed-change lanes. Rev. Can. Génie Civ. 2008, 35, 531–541. [Google Scholar] [CrossRef]
- Wang, Z.; Chen, H.; Lu, J.J. Exploring Impacts of Factors Contributing to Injury Severity at Freeway Diverge Areas. Transp. Res. Rec. 2018, 2102, 43–52. [Google Scholar] [CrossRef]
- Ali, Y.; Zheng, Z.D.; Haque, M.M.; Yildirimoglu, M.; Washington, S. CLACD: A complete Lane-Changing decision modeling framework for the connected and traditional environments. Transp. Res. Part C-Emerg. Technol. 2021, 128, 103162. [Google Scholar] [CrossRef]
- Fatema, T.; Ismail, K.; Hassan, Y. Validation of Probabilistic Model for Design of Freeway Entrance Speed Change Lanes. Transp. Res. Rec. 2014, 2460, 97–106. [Google Scholar] [CrossRef]
- Wang, R.H.; Hu, J.B.; Zhang, X.Q. Analysis of the Driver’s Behavior Characteristics in Low Volume Freeway Interchange. Math. Probl. Eng. 2016, 2016, 2679516. [Google Scholar] [CrossRef]
- Chen, D.W.; Cheng, S.W.; Liu, J.Y.; Zhang, J.; You, X.Y. A Simulation-Based Optimization Method for Truck-Prohibit Ramp Placement along Freeways. Math. Probl. Eng. 2023, 2023, 4170669. [Google Scholar] [CrossRef]
- Ahammed Mohammad, A.; Hassan, Y.; Sayed Tarek, A. Modeling Driver Behavior and Safety on Freeway Merging Areas. J. Transp. Eng. 2008, 134, 370–377. [Google Scholar] [CrossRef]
- McCartt, A.T.; Northrup, V.S.; Retting, R.A. Types and characteristics of ramp-related motor vehicle crashes on urban interstate roadways in Northern Virginia. J. Saf. Res. 2004, 35, 107–114. [Google Scholar] [CrossRef]
- Zhang, X.; Wang, J.B.; Li, T.N.; Sun, J. Safety factors of exit slip roads on China’s urban motorways. Proc. Inst. Civ. Eng. Transp. 2017, 170, 276–286. [Google Scholar] [CrossRef]
- Chen, W.; Li, H.; Hou, E.K.; Wang, S.Q.; Wang, G.R.; Panahi, M.; Li, T.; Peng, T.; Guo, C.; Niu, C.; et al. GIS-based groundwater potential analysis using novel ensemble weights-of-evidence with logistic regression and functional tree models. Sci. Total Environ. 2018, 634, 853–867. [Google Scholar] [CrossRef] [PubMed]
- Persson, P.O. A sparse and high-order accurate line-based discontinuous Galerkin method for unstructured meshes. J. Comput. Phys. 2013, 233, 414–429. [Google Scholar] [CrossRef]
- Pan, B.H.; Xie, Z.J.; Liu, S.R.; Shao, Y.; Cai, J.J. Evaluating Designs of a Three-Lane Exit Ramp Based on the Entropy Method. IEEE Access 2021, 9, 53436–53451. [Google Scholar] [CrossRef]
- Ledesma, R.D.; Ferrando, P.J.; Trogolo, M.A.; Poo, F.M.; Tosi, J.D.; Castro, C. Exploratory factor analysis in transportation research: Current practices and recommendations. Transp. Res. Part F-Traffic Psychol. Behav. 2021, 78, 340–352. [Google Scholar] [CrossRef]
- Zhang, K.R.; Hassan, M.; Yahaya, M.; Yang, S.P. Analysis of Work-Zone Crashes Using the Ordered Probit Model with Factor Analysis in Egypt. J. Adv. Transp. 2018, 2018, 8570207. [Google Scholar] [CrossRef]
- Zhang, C.; He, J.; Wang, Y.H.; Yan, X.T.; Zhang, C.J.; Chen, Y.K.; Liu, Z.Y.; Zhou, B.J. A Crash Severity Prediction Method Based on Improved Neural Network and Factor Analysis. Discret. Dyn. Nat. Soc. 2020, 2020, 4013185. [Google Scholar] [CrossRef]
- Kong, X.Q.; Das, S.; Zhou, H.M.; Zhang, Y.L. Characterizing phone usage while driving: Safety impact from road and operational perspectives using factor analysis. Accid. Anal. Prev. 2021, 152, 106012. [Google Scholar] [CrossRef]
- Liu, P.; Chen, H.Y.; Lu, J.J.; Cao, B. How Lane Arrangements on Freeway Mainlines and Ramps Affect Safety of Freeways with Closely Spaced Entrance and Exit Ramps. J. Transp. Eng. 2010, 136, 614–622. [Google Scholar] [CrossRef]
- Huang, L.H.; Zhao, X.H.; Li, Y.; Ma, J.M.; Yang, L.P.; Rong, J.; Wang, Y. Optimal design alternatives of advance guide signs of closely spaced exit ramps on urban expressways. Accid. Anal. Prev. 2020, 138, 105465. [Google Scholar] [CrossRef]
- Li, Z.B.; Wang, W.; Liu, P.; Bai, L.; Du, M.Q. Analysis of Crash Risks by Collision Type at Freeway Diverge Area Using Multivariate Modeling Technique. J. Transp. Eng. 2015, 141, 04015002. [Google Scholar] [CrossRef]
- Liao, Y.G.; Yang, Y.; Ding, Z.Z.; Tong, K.M.; Zeng, Y.J. Risk Distribution Characteristics and Optimization of Short Weaving Area for Complex Municipal Interchanges. J. Adv. Transp. 2021, 2021, 5573335. [Google Scholar] [CrossRef]
- Kusuma, A.; Liu, R.H.; Choudhury, C.; Montgomery, F. Analysis of the Driving Behaviour at Weaving Section Using Multiple Traffic Surveillance Data. In Proceedings of the 17th Meeting of the EURO-Working-Group on Transportation (EWGT), Seville, Spain, 2–4 July 2014; pp. 51–59. [Google Scholar]
- Kwon, E.; Lau, R.; Aswegan, J. Maximum possible weaving volume for effective operations of ramp-weave areas—Online estimation. In Proceedings of the 79th Annual Meeting of the Transportation-Research-Board, Washington, DC, USA, 9–13 January 2000; pp. 132–141. [Google Scholar]
- Al-Jameel, H. Characteristics of the driver behaviour in weaving sections: Empirical study. Int. J. Eng. Technol. Res. 2017, 2, 1430–1446. [Google Scholar]
- Skabardonis, A. Simulation of freeway weaving areas. In Proceedings of the 81st Annual Meeting of the Transportation-Research-Board, Washington, DC, USA, 13–17 January 2002; pp. 115–124. [Google Scholar]
- Mai, T.; Jiang, R.; Chung, E. A Cooperative Intelligent Transport Systems (C-ITS)-based lane-changing advisory for weaving sections. J. Adv. Transp. 2016, 50, 752–768. [Google Scholar] [CrossRef]
- Shang, T.; Lian, G.; Zhao, Y.C.; Liu, X.L.; Wang, W.J. Off-Ramp Vehicle Mandatory Lane-Changing Duration in Small Spacing Section of Tunnel-Interchange Section Based on Survival Analysis. J. Adv. Transp. 2022, 2022, 9427052. [Google Scholar] [CrossRef]
- Le, T.Q.; Porter, R.J. Safety Evaluation of Geometric Design Criteria for Spacing of Entrance-Exit Ramp Sequence and Use of Auxiliary Lanes. Transp. Res. Rec. 2012, 2309, 12–20. [Google Scholar] [CrossRef]
- Guo, Y.Q. Effects of Ramp Spacing on Freeway Mainline Crashes. In Proceedings of the ICCET 2011, Jinan, China, 14–16 October 2011; pp. 95–99. [Google Scholar]
- Park, B.J.; Fitzpatrick, K.; Lord, D. Evaluating the Effects of Freeway Design Elements on Safety. Transp. Res. Rec. 2010, 2195, 58–69. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Porter, R.J.; Pesti, G.; Chu, C.L.; Park, E.S.; Le, T. Guidelines for Spacing Between Freeway Ramps. Transp. Res. Rec. 2011, 2262, 3–12. [Google Scholar] [CrossRef]
- Liu, Y.T.; Pan, B.H.; Zhang, Z.L.; Zhang, R.Y.; Shao, Y. Evaluation of Design Method for Highway Adjacent Tunnel and Exit Connection Section Length Based on Entropy Method. Entropy 2022, 24, 1794. [Google Scholar] [CrossRef]
- Chen, S.K.; Mao, B.H.; Liu, S.; Sun, Q.X.; Wei, W.; Zhan, L.X. Computer-aided analysis and evaluation on ramp spacing along urban expressways. Transp. Res. Part C-Emerg. Technol. 2013, 36, 381–393. [Google Scholar] [CrossRef]
- Chen, D.W.; Mo, F.X.; Chen, Y.; Zhang, J.; You, X.Y. Optimization of Ramp Locations along Freeways: A Dynamic Programming Approach. Sustainability 2022, 14, 9718. [Google Scholar] [CrossRef]
- Ma, J.; Zeng, Y.L.; Chen, D.W. Ramp Spacing Evaluation of Expressway Based on Entropy-Weighted TOPSIS Estimation Method. Systems 2023, 11, 139. [Google Scholar] [CrossRef]
- Zhang, G.; Sun, D.H.; Zhao, M. Phase transition of a new lattice hydrodynamic model with consideration of on-ramp and off-ramp. Commun. Nonlinear Sci. Numer. Simul. 2018, 54, 347–355. [Google Scholar] [CrossRef]
- Zhao, J.Y.; Guo, Y.Y.; Liu, P. Safety impacts of geometric design on freeway segments with closely spaced entrance and exit ramps. Accid. Anal. Prev. 2021, 163, 106461. [Google Scholar] [CrossRef]
- Huang, Z.F.; Zhang, Z.H.; Li, H.J.; Qin, L.Q.; Rong, J. Determining Appropriate Lane-Changing Spacing for Off-Ramp Areas of Urban Expressways. Sustainability 2019, 11, 2087. [Google Scholar] [CrossRef]
- Sato, H.; Xing, J.; Tanaka, S.; Morikita, K. Examining the Effect of Connecting Auxiliary Lanes on Mitigation of Expressway Traffic Congestion. Int. J. Intell. Transp. Syst. Res. 2011, 9, 55–63. [Google Scholar] [CrossRef]
- Shea, M.S.; Le, T.Q.; Porter, R.J. Combined Crash Frequency-Crash Severity Evaluation of Geometric Design Decisions Entrance-Exit Ramp Spacing and Auxiliary Lane Presence. Transp. Res. Rec. 2015, 2521, 54–63. [Google Scholar] [CrossRef]
- Qi, Y.; Wang, Y.B.; Chen, X.S.; Cheu, R.L.; Yu, L.; Teng, H.L. Methods of dropping auxiliary lanes at freeway weaving segments. Transp. Plan. Technol. 2018, 41, 389–401. [Google Scholar] [CrossRef]
- Wang, X.F.; Ding, Z.Z.; Guo, K.; Lin, Y.J. A Simulation-Based Comprehensive Analysis for Traffic Efficiency and Spatial Distribution of Risks in Short Weaving Area of Municipal Interchange. J. Adv. Transp. 2021, 2021, 9968426. [Google Scholar] [CrossRef]
- Wang, Y.P.; Xu, J.; Liu, X.L.; Zheng, Z.J.; Zhang, H.S.; Wang, C.Y. Analysis on Risk Characteristics of Traffic Accidents in Small-Spacing Expressway Interchange. Int. J. Environ. Res. Public Health 2022, 19, 9938. [Google Scholar] [CrossRef]
- Liu, X.J.; Shao, C.Y.; Yang, S.; Zhang, R.Y.; Pan, B.H. Study on the location of unconventional outside left-turn lane at signalized intersections based on an entropy method. Front. Environ. Sci. 2022, 10, 970836. [Google Scholar] [CrossRef]
- Pan, B.H.; Chai, H.; Liu, J.; Shao, Y.; Liu, S.R.; Zhang, R.Y. Evaluating Operational Features of Multilane Turbo Roundabouts with an Entropy Method. J. Transp. Eng. Part A-Syst. 2022, 148, 04022072. [Google Scholar] [CrossRef]
- Pan, B.H.; Liu, S.R.; Xie, Z.J.; Shao, Y.; Li, X.; Ge, R.C. Evaluating Operational Features of Three Unconventional Intersections under Heavy Traffic Based on CRITIC Method. Sustainability 2021, 13, 4098. [Google Scholar] [CrossRef]
- AASHTO. A Policy on Geometric Design of Highways and Streets; AASHTO: Washington, DC, USA, 2018. [Google Scholar]
- Roadway Design Section. Guidelines for Design of Highway Grade-Separated Intersections; JTG/T D21; Arizona Department of Transportation: Phoenix, AZ, USA, 2014.
- PTV. PTV Vissim 2022 User Manual; PTV China: Shanghai, China, 2022. [Google Scholar]
- Xiang, Y.; Li, Z.B.; Wang, W.; Chen, J.X.; Wang, H.; Li, Y. Evaluating the Operational Features of an Unconventional Dual-Bay U-Turn Design for Intersections. PLoS ONE 2016, 11, e0158914. [Google Scholar] [CrossRef] [PubMed]
- Sun, J. Guideline for Microscopic Traffic Simulation Analysis; Tongji University Press: Shanghai, China, 2014. [Google Scholar]
- Henclewood, D.; Suh, W.; Rodgers, M.O.; Fujimoto, R.; Hunter, M.P. A calibration procedure for increasing the accuracy of microscopic traffic simulation models. Simul.-Trans. Soc. Model. Simul. Int. 2017, 93, 35–47. [Google Scholar] [CrossRef]
- Lili, P.; Rahul, J. Surrogate Safety Assessment Model (SSAM)-Software User Manual; Federal Highway Administration: Washiton, DC, USA, 2008.
- Liu, Q.J.; Deng, J.L.; Shen, Y.F.; Wang, W.X.; Zhang, Z.; Lu, L.J. Safety and Efficiency Analysis of Turbo Roundabout with Simulations Based on the Lujiazui Roundabout in Shanghai. Sustainability 2020, 12, 7479. [Google Scholar] [CrossRef]
- JTG B01-2014; Technical Standard of Highway Engineering. Ministry of Transport of PRC: Bejing, China, 2014.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Importance of Element i over Element j | |
|---|---|
| Same | 1 |
| Slightly higher | 3 |
| Stronger | 5 |
| Very Strong | 7 |
| Extremely strong | 9 |
| Falls between adjacent levels | 2, 4, 6, 8 |
| Factor | Traffic Volume | Diverging/ Emerging Ratio | Number of Mainline Lanes | Vehicle Composition | Traffic Flow Characteristics |
|---|---|---|---|---|---|
| Traffic Volume | 1 | 1 | 5 | 5 | 7 |
| Diverging/Emerging ratio | 1 | 1 | 7 | 8 | 9 |
| Number of mainline lanes | 1/5 | 1/3 | 1 | 3 | 5 |
| Vehicle composition | 1/5 | 1/8 | 1/3 | 1 | 2 |
| Traffic flow characteristics | 1/7 | 1/9 | 1/5 | 1/2 | 1 |
| Factor | Traffic Volume | Diverging/ Emerging Ratio | Number of Mainline Lanes | Vehicle Composition | Traffic Flow Characteristics |
|---|---|---|---|---|---|
| Weight | 0.3037 | 0.4739 | 0.1307 | 0.0541 | 0.0376 |
| Item | Morning | Evening | ||||||
|---|---|---|---|---|---|---|---|---|
| Flow | Total | Through | Emerging | Diverging | Total | Through | Emerging | Diverging |
| Car | 2853 | 1513 | 526 | 1340 | 3188 | 1548 | 648 | 1640 |
| Truck | 157 | 108 | 57 | 49 | 228 | 184 | 76 | 44 |
| Maximum Deceleration (m/s2) | −1 m/s2 Distance (m) | Acceptable Deceleration (m/s2) | Coordinate Maximum Deceleration of Brakes (m/s2) | Safety Distance Reduction Factor |
|---|---|---|---|---|
| −4 | 50 | −2 | −4 | 0.5 |
| Flow | Through Traffic | Diverging Traffic | Emerging Traffic |
|---|---|---|---|
| Investigated capacity (veh/h) | 1732 | 1684 | 724 |
| Simulated capacity (veh/h) | 1576.8 | 1620 | 648 |
| Individual MAPE (%) | −8.96% | −3.8% | −10.5% |
| MAPE (%) | 0.28% | ||
| Item | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 |
|---|---|---|---|---|
| Travel time (s) | 77.81 | 84.2 | 70.96 | 74.86 |
| Delay (s) | 2.58 | 4.73 | 1.30 | 1.44 |
| Number of stops | 0.036 | 0.10 | 0.009 | 0.007 |
| CO emissions (g) | 5967.36 | 5350.25 | 4948.78 | 5019.775 |
| Fuel consumption (gallon) | 85.39 | 76.54 | 70.78 | 71.78 |
| Scheme | Rear end | Lane Change | Crossing | TTC | PET | CSI |
|---|---|---|---|---|---|---|
| 1 | 32 | 30 | 0 | 0.36 | 0.35 | 0.24 |
| 2 | 22 | 16 | 0 | 0.23 | 0.31 | 0.17 |
| 3 | 15 | 33 | 0 | 0.24 | 0.32 | 0.20 |
| 4 | 173 | 10 | 0 | 0.15 | 0.03 | 0.27 |
| Item | Value |
|---|---|
| Traffic volume (veh/h) | 1320/1980/2640/3300/3960/4620/5280/5940/6600 |
| Diverging and emerging ratio (%) | 10/20/30/40/50 |
| Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | ||
|---|---|---|---|---|---|
| KMO test | Value | 0.754 | 0.769 | 0.863 | 0.798 |
| Bartlett’s test of sphericity | Approximate chi-square | 1554 | 2111 | 1983 | 1399 |
| Degree of freedom | 28 | 28 | 28 | 28 | |
| Significance | 0 | 0 | 0 | 0 | |
| Total Variance Explained | ||||||
|---|---|---|---|---|---|---|
| Ingredient | Explanatory Rate of Variance before Rotation | Explanatory Rate of Variance after Rotation | ||||
| Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | |
| 1 | 5.605 | 70.064 | 70.064 | 475.613 | 59.452 | 59.452 |
| 2 | 1.516 | 18.95 | 89.013 | 203.629 | 25.454 | 84.905 |
| 3 | 0.766 | 9.572 | 98.585 | 109.441 | 13.68 | 98.585 |
| 4 | 0.045 | 0.566 | 99.152 | |||
| 5 | 0.041 | 0.512 | 99.664 | |||
| 6 | 0.023 | 0.292 | 99.956 | |||
| 7 | 0.003 | 0.044 | 100 | |||
| 8 | 100 | |||||
| Total Variance Explained | ||||||
|---|---|---|---|---|---|---|
| Ingredient | Explanatory Rate of Variance before Rotation | Explanatory Rate of Variance after Rotation | ||||
| Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | |
| 1 | 5.353 | 66.906 | 66.906 | 495.513 | 61.939 | 61.939 |
| 2 | 1.763 | 22.042 | 88.948 | 183.463 | 22.933 | 84.872 |
| 3 | 0.758 | 9.479 | 98.427 | 108.442 | 13.555 | 98.427 |
| 4 | 0.099 | 1.242 | 99.669 | |||
| 5 | 0.014 | 0.175 | 99.844 | |||
| 6 | 0.01 | 0.131 | 99.975 | |||
| 7 | 0.002 | 0.025 | 100 | |||
| 8 | 100 | |||||
| Total Variance Explained | ||||||
|---|---|---|---|---|---|---|
| Ingredient | Explanatory Rate of Variance before Rotation | Explanatory Rate of Variance after Rotation | ||||
| Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | |
| 1 | 5.806 | 72.57 | 72.57 | 490.35 | 61.294 | 61.294 |
| 2 | 1.221 | 15.265 | 87.836 | 183.231 | 22.904 | 84.198 |
| 3 | 0.785 | 9.808 | 97.644 | 107.569 | 13.446 | 97.644 |
| 4 | 0.14 | 1.756 | 99.4 | |||
| 5 | 0.022 | 0.28 | 99.68 | |||
| 6 | 0.018 | 0.221 | 99.901 | |||
| 7 | 0.008 | 0.099 | 100 | |||
| 8 | 100 | |||||
| Total Variance Explained | ||||||
|---|---|---|---|---|---|---|
| Ingredient | Explanatory Rate of Variance before Rotation | Explanatory Rate of Variance after Rotation | ||||
| Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | Characteristic Root | Explanation of Variance (%) | Cumulative Variance Explained (%) | |
| 1 | 6.631 | 82.891 | 82.891 | 419.801 | 52.475 | 52.475 |
| 2 | 0.96 | 11.996 | 94.887 | 204.234 | 25.529 | 78.004 |
| 3 | 0.183 | 2.293 | 97.18 | 153.407 | 19.176 | 97.18 |
| 4 | 0.101 | 1.257 | 98.437 | |||
| 5 | 0.081 | 1.014 | 99.451 | |||
| 6 | 0.032 | 0.396 | 99.847 | |||
| 7 | 0.012 | 0.153 | 100 | |||
| 8 | 100 | |||||
| Original Variable | Rotated Factor Loading Coefficients | Commonality | ||
|---|---|---|---|---|
| Factor 1 | Factor 2 | Factor 3 | ||
| Delay | 0.968 | 0.163 | −0.167 | 0.992 |
| Travel time | 0.958 | 0.19 | −0.171 | 0.983 |
| CO emission | 0.947 | 0.254 | −0.173 | 0.992 |
| Fuel consumption | 0.947 | 0.254 | −0.173 | 0.992 |
| TTC | 0.14 | 0.978 | 0.072 | 0.981 |
| PET | 0.298 | 0.933 | −0.14 | 0.979 |
| CSI | −0.272 | −0.022 | 0.962 | 0.999 |
| Number of conflicts | 0.96 | 0.134 | −0.169 | 0.968 |
| Original Variable | Rotated Factor Loading Coefficients | Commonality | ||
|---|---|---|---|---|
| Factor 1 | Factor 2 | Factor 3 | ||
| Delay | 0.981 | 0.09 | −0.157 | 0.995 |
| Travel time | 0.974 | 0.122 | −0.167 | 0.992 |
| CO emission | 0.978 | 0.142 | −0.139 | 0.997 |
| Fuel consumption | 0.978 | 0.142 | −0.139 | 0.997 |
| TTC | −0.04 | 0.96 | 0.177 | 0.955 |
| PET | 0.317 | 0.916 | −0.092 | 0.949 |
| CSI | −0.246 | 0.089 | 0.964 | 0.998 |
| Number of conflicts | 0.983 | 0.046 | −0.155 | 0.992 |
| Original Variable | Rotated Factor Loading Coefficients | Commonality | ||
|---|---|---|---|---|
| Factor 1 | Factor 2 | Factor 3 | ||
| Delay | 0.968 | 0.152 | −0.173 | 0.989 |
| Travel time | 0.963 | 0.184 | −0.157 | 0.985 |
| CO emission | 0.942 | 0.297 | −0.135 | 0.995 |
| Fuel consumption | 0.942 | 0.297 | −0.135 | 0.995 |
| TTC | 0.126 | 0.968 | 0.021 | 0.954 |
| PET | 0.535 | 0.787 | −0.083 | 0.912 |
| CSI | −0.213 | −0.009 | 0.977 | 1.000 |
| Number of conflicts | 0.958 | 0.207 | −0.149 | 0.982 |
| Original Variable | Rotated Factor loading Coefficients | Commonality | ||
|---|---|---|---|---|
| Factor 1 | Factor 2 | Factor 3 | ||
| Delay | 0.872 | 0.459 | 0.079 | 0.977 |
| Travel time | 0.921 | 0.34 | 0.13 | 0.981 |
| CO emission | 0.778 | 0.505 | 0.329 | 0.968 |
| Fuel consumption | 0.778 | 0.505 | 0.329 | 0.968 |
| TTC | 0.124 | 0.98 | 0.1 | 0.986 |
| PET | 0.389 | 0.717 | 0.519 | 0.935 |
| CSI | −0.248 | −0.115 | 0.937 | 0.975 |
| Number of conflicts | 0.735 | 0.654 | 0.12 | 0.983 |
| Item | Delay | Travel Time | Number of Conflicts | TTC | PET | CSI | CO Emission | Fuel Consumption | |
|---|---|---|---|---|---|---|---|---|---|
| Scheme 1 | Ingredient 1 | 0.243 | 0.233 | 0.245 | −0.116 | −0.117 | 0.196 | 0.217 | 0.217 |
| Ingredient 2 | −0.074 | −0.055 | −0.09 | 0.568 | 0.521 | −0.01 | −0.014 | −0.014 | |
| Ingredient 3 | 0.076 | 0.067 | 0.073 | 0.079 | −0.127 | 1.075 | 0.059 | 0.059 | |
| Scheme 2 | Ingredient 1 | 0.218 | 0.209 | 0.224 | −0.086 | −0.054 | 0.181 | −1.198 | 1.628 |
| Ingredient 2 | −0.044 | −0.023 | −0.072 | 0.558 | 0.531 | −0.079 | 0.244 | −0.275 | |
| Ingredient 3 | 0.062 | 0.043 | 0.073 | 0.036 | −0.179 | 1.065 | −0.066 | 0.815 | |
| Scheme 3 | Ingredient 1 | 0.248 | 0.242 | 0.236 | −0.219 | −0.054 | 0.177 | 0.479 | −0.061 |
| Ingredient 2 | −0.133 | −0.109 | −0.09 | 0.719 | 0.474 | −0.035 | 0.321 | −0.355 | |
| Ingredient 3 | 0.035 | 0.049 | 0.055 | −0.029 | −0.029 | 1.06 | 0.188 | −0.07 | |
| Scheme 4 | Ingredient 1 | 0.522 | 0.892 | 0.571 | −0.239 | −0.295 | 0.546 | 0.173 | 0.173 |
| Ingredient 2 | −0.384 | −0.162 | 0.188 | 0.891 | 0.333 | −0.034 | −0.014 | −0.014 | |
| Ingredient 3 | −0.19 | −0.139 | −0.137 | −0.049 | −0.274 | 1.095 | 0.063 | 0.063 |
| Principal Ingredient 1 | Principal Ingredient 2 | Principal Ingredient 3 | |
|---|---|---|---|
| Scheme 1 | 60.305% | 25.819% | 13.876% |
| Scheme 2 | 62.929% | 23.299% | 13.772% |
| Scheme 3 | 62.773% | 23.457% | 13.771% |
| Scheme 4 | 53.998% | 26.27% | 19.732% |
| Item | Scheme 1 | Scheme 2 | Scheme 3 | Scheme 4 | |
|---|---|---|---|---|---|
| Factor 1 | Delay | 7.133 | 8.821 | 5.832 | 4.863 |
| Travel time | 8.451 | 9.924 | 7.133 | 4.859 | |
| CO emission | 9.903 | 10.593 | 7.890 | 8.054 | |
| Fuel consumption | 9.903 | 10.593 | 7.890 | 8.054 | |
| Number of conflicts | 10.235 | 10.736 | 6.380 | 13.708 | |
| Factor 2 | TTC | 18.332 | 14.222 | 21.226 | 8.257 |
| PET | 25.595 | 28.376 | 34.777 | 34.068 | |
| Factor 3 | CSI | 10.449 | 6.734 | 8.871 | 18.136 |
| Principal Ingredient | Principal Ingredient Entropy Weights | Principal Ingredient Variance Contribution Ratio | Combined Weight | |
|---|---|---|---|---|
| Scheme 1 | F1 | 45.625 | 60.305 | 52.97 |
| F2 | 43.927 | 25.819 | 34.87 | |
| F3 | 10.449 | 13.876 | 12.16 | |
| Scheme 2 | F1 | 50.668 | 62.929 | 56.80 |
| F2 | 42.598 | 23.299 | 32.95 | |
| F3 | 6.734 | 13.772 | 10.25 | |
| Scheme 3 | F1 | 35.126 | 62.773 | 48.95 |
| F2 | 56.003 | 23.457 | 39.73 | |
| F3 | 8.871 | 13.771 | 11.32 | |
| Scheme 4 | F1 | 39.539 | 53.998 | 46.77 |
| F2 | 42.325 | 26.27 | 34.30 | |
| F3 | 18.136 | 19.732 | 18.93 |
| The Number of Conflicts | TTC | PET | CSI | Travel Time | Delay | CO Emissions | Fuel Consumption | |
|---|---|---|---|---|---|---|---|---|
| 1 | 62 | 0.36 | 0.35 | 0.24 | 77.81 | 2.58 | 5967.36 | 85.39 |
| 2 | 38 | 0.23 | 0.31 | 0.17 | 84.2 | 4.73 | 5350.25 | 76.54 |
| 3 | 48 | 0.24 | 0.32 | 0.20 | 70.96 | 1.3 | 4948.78 | 70.78 |
| 4 | 183 | 0.15 | 0.03 | 0.27 | 74.86 | 1.44 | 5019.78 | 71.78 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, X.; Shi, M.; Yang, H.; Peng, J.; Pan, B. Research on Efficient Operation for Compound Interchange in China from an Auxiliary Lanes Configuration Aspect. Appl. Sci. 2023, 13, 10499. https://doi.org/10.3390/app131810499
Tian X, Shi M, Yang H, Peng J, Pan B. Research on Efficient Operation for Compound Interchange in China from an Auxiliary Lanes Configuration Aspect. Applied Sciences. 2023; 13(18):10499. https://doi.org/10.3390/app131810499
Chicago/Turabian StyleTian, Xin, Mengmeng Shi, Hang Yang, Junning Peng, and Binghong Pan. 2023. "Research on Efficient Operation for Compound Interchange in China from an Auxiliary Lanes Configuration Aspect" Applied Sciences 13, no. 18: 10499. https://doi.org/10.3390/app131810499
APA StyleTian, X., Shi, M., Yang, H., Peng, J., & Pan, B. (2023). Research on Efficient Operation for Compound Interchange in China from an Auxiliary Lanes Configuration Aspect. Applied Sciences, 13(18), 10499. https://doi.org/10.3390/app131810499