
Time-Optimal Trajectory Planning for Woodworking Manipulators Using an Improved PSO Algorithm

Abstract
:1. Introduction
2. Materials and Methods
2.1. Mechanism of Woodworking Manipulator
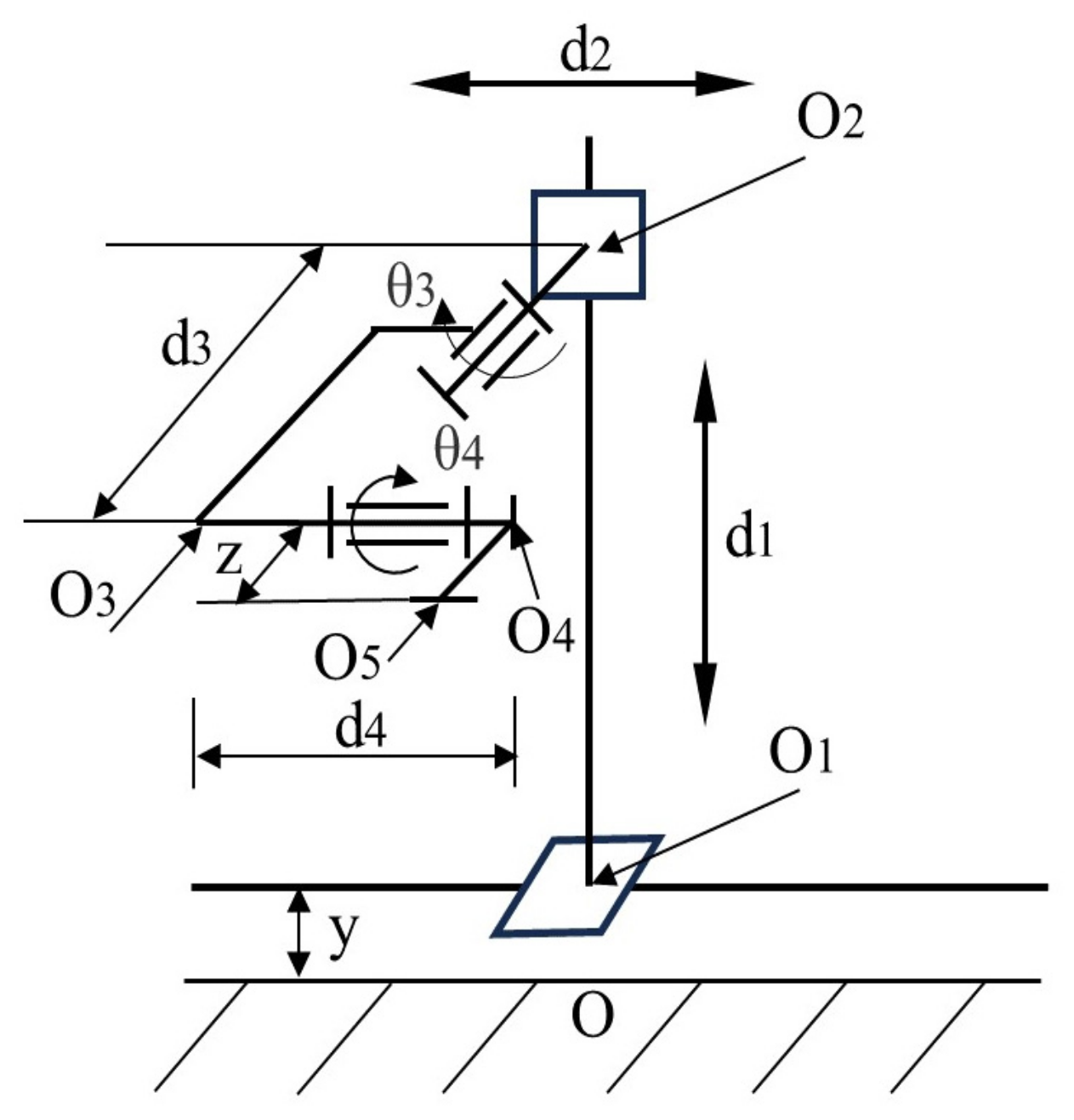
2.1.1. Physical Model of Woodworking Manipulator
2.1.2. Kinematic Model of Woodworking Manipulator
2.2. 3-5-3 Piecewise Polynomial Interpolation
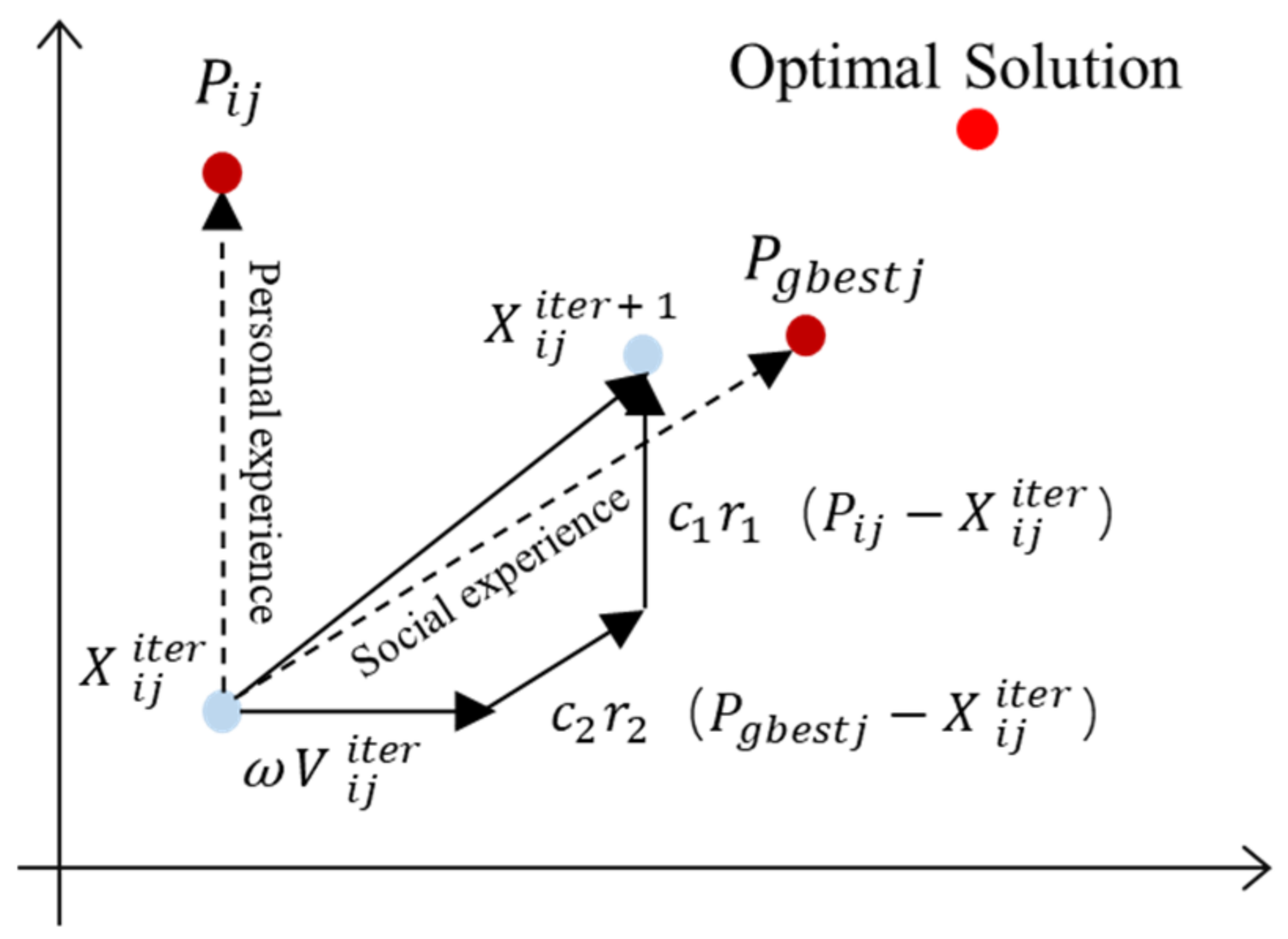
2.3. The Traditional PSO Algorithm
2.4. The Improvement Strategy of PSO
2.4.1. Initial Population by Circle Chaotic Mapping
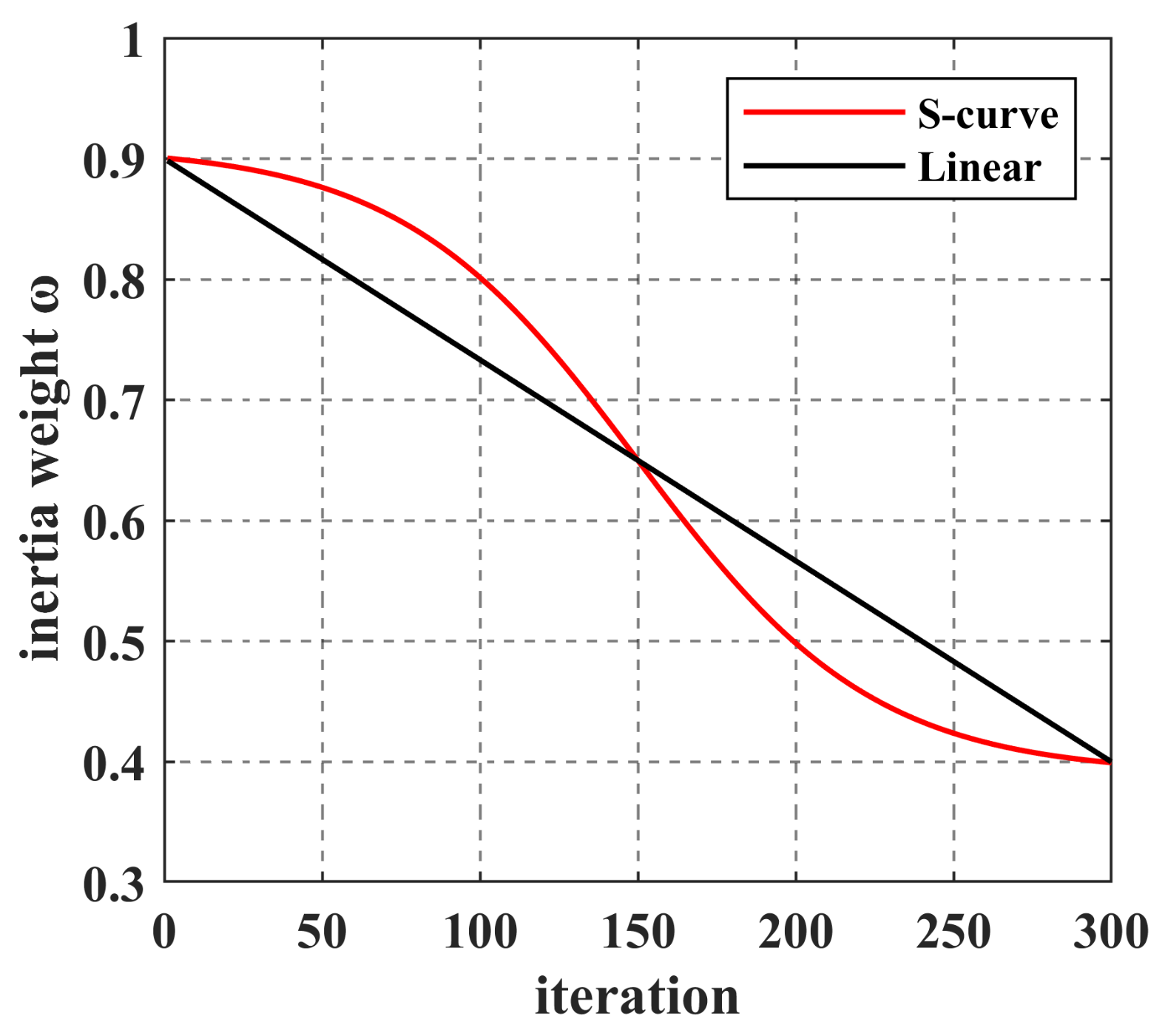
2.4.2. S-curve Type Inertia Weight Nonlinear Decreasing Method
2.4.3. Position Updating Integrating the Gold-SA
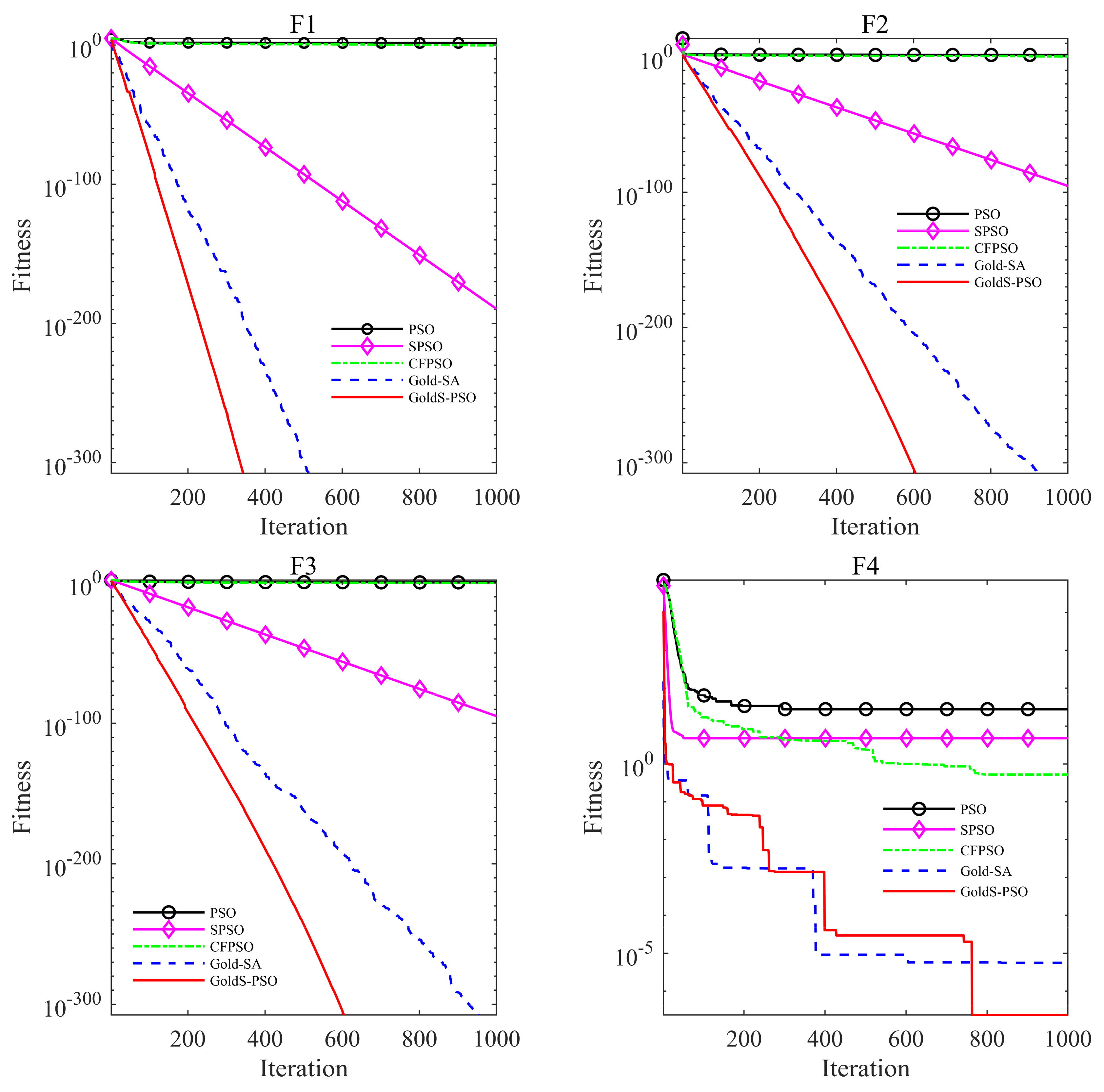
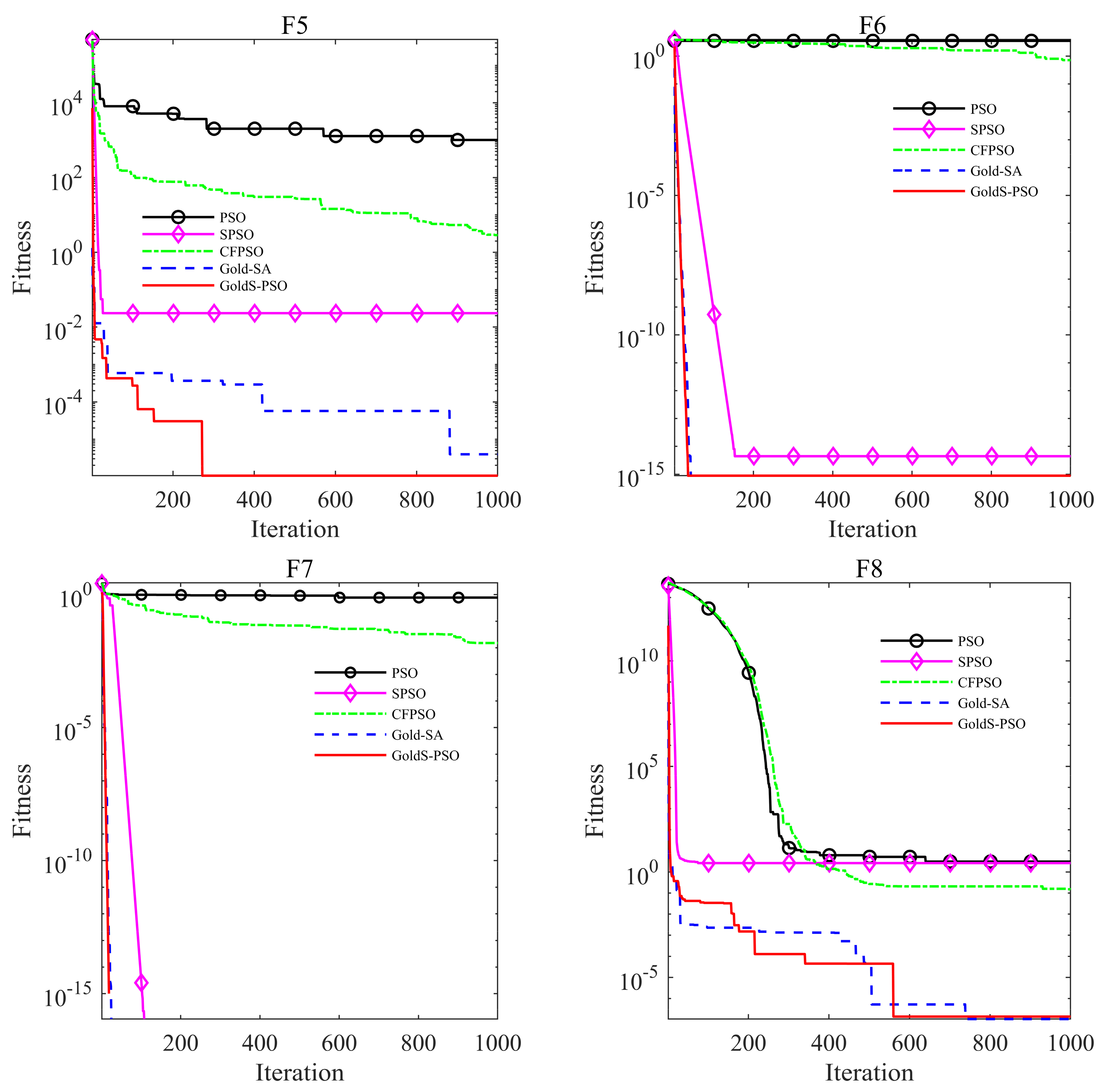
2.5. Comparative Testing Experiment
3. Experiments and Results
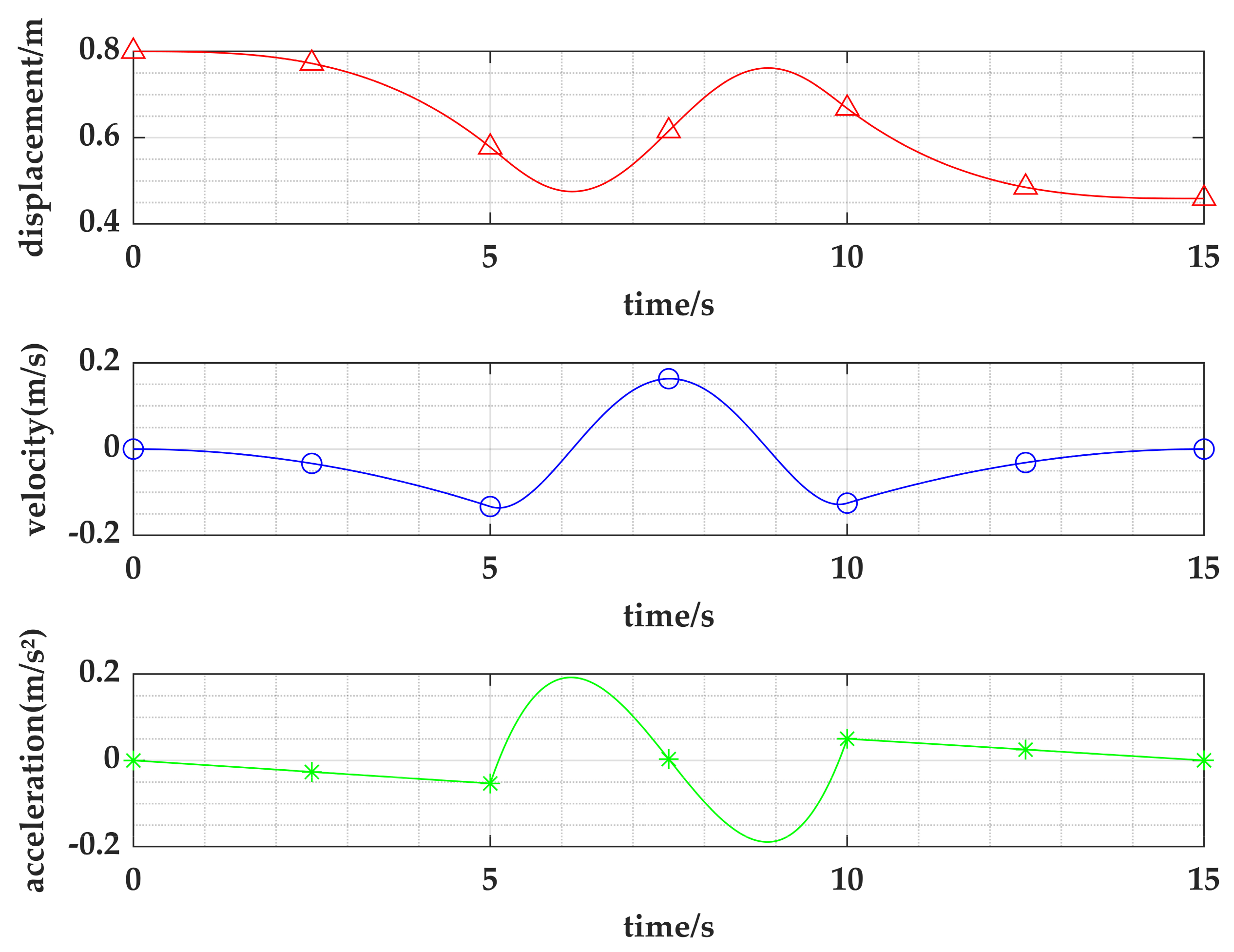
3.1. Time Optimal Trajectory Planning Process
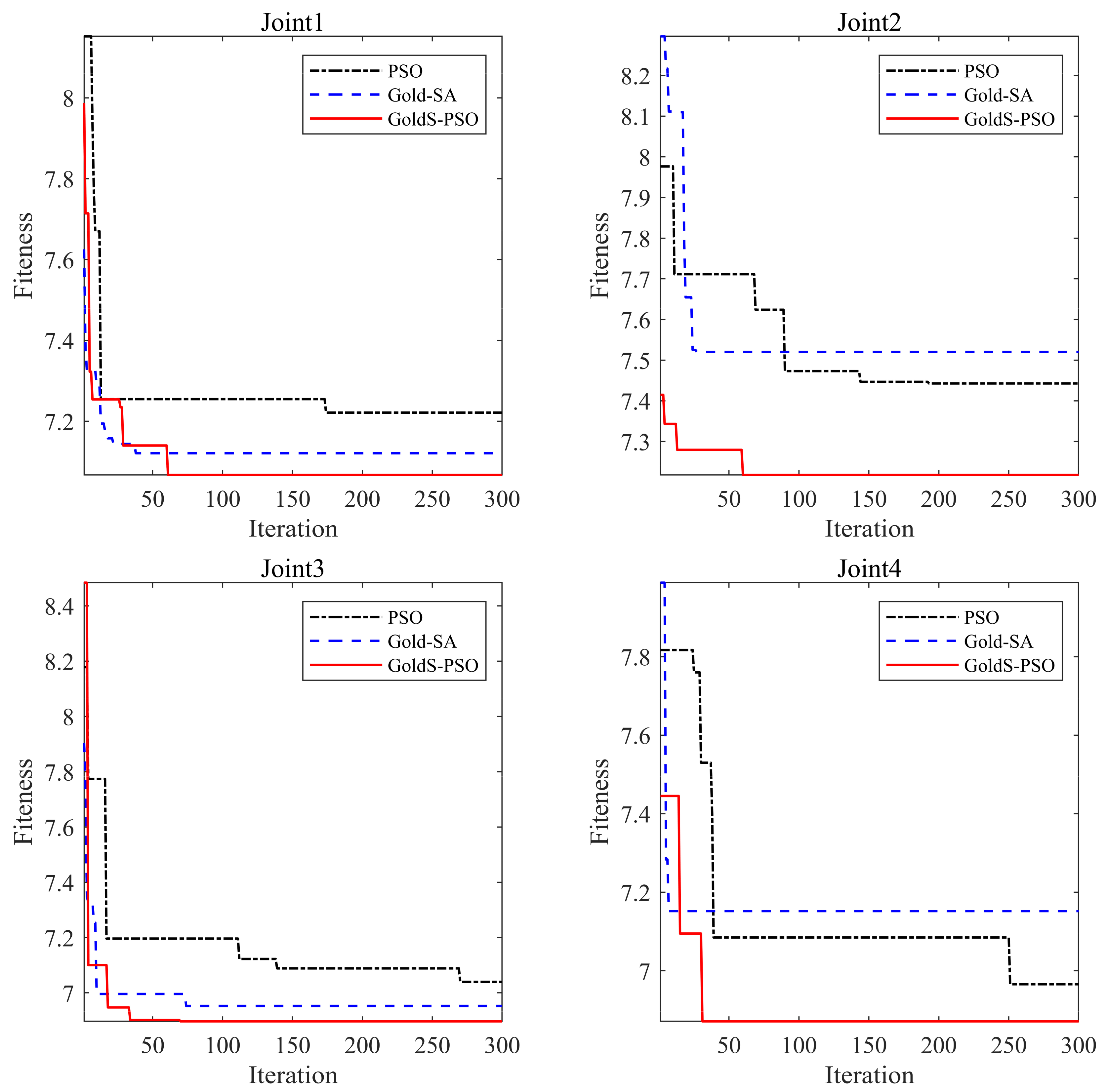
3.2. Time Optimization Experiment of Woodworking Manipulator
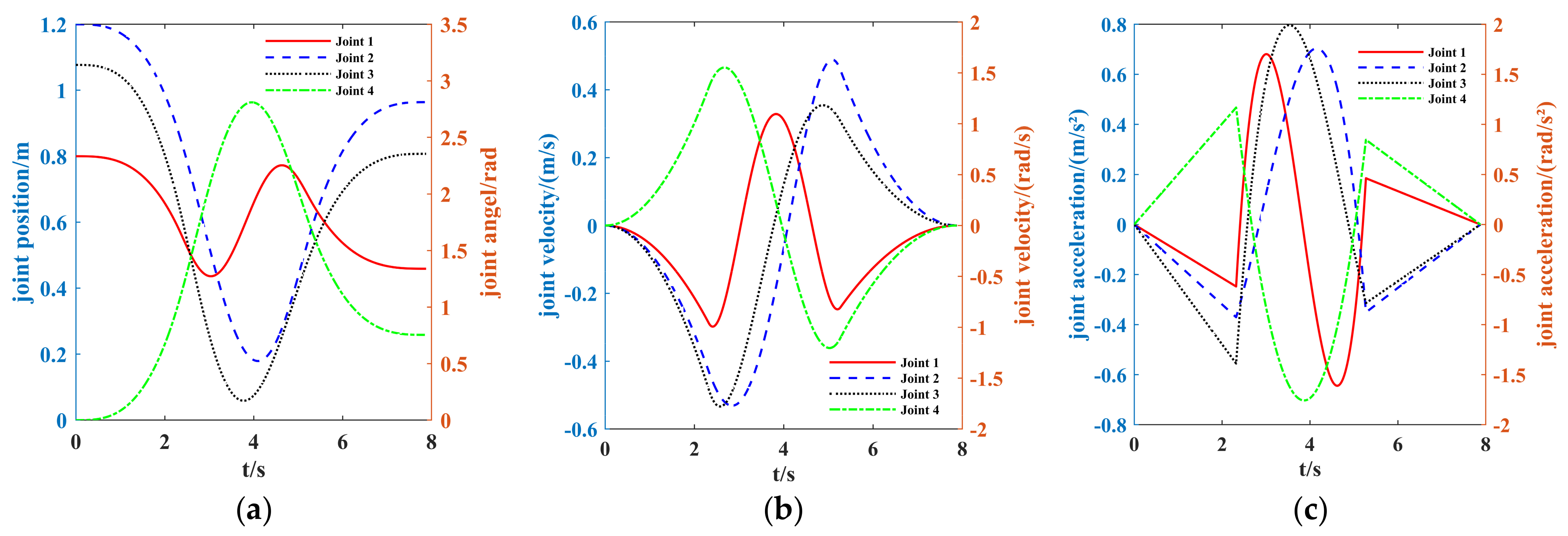
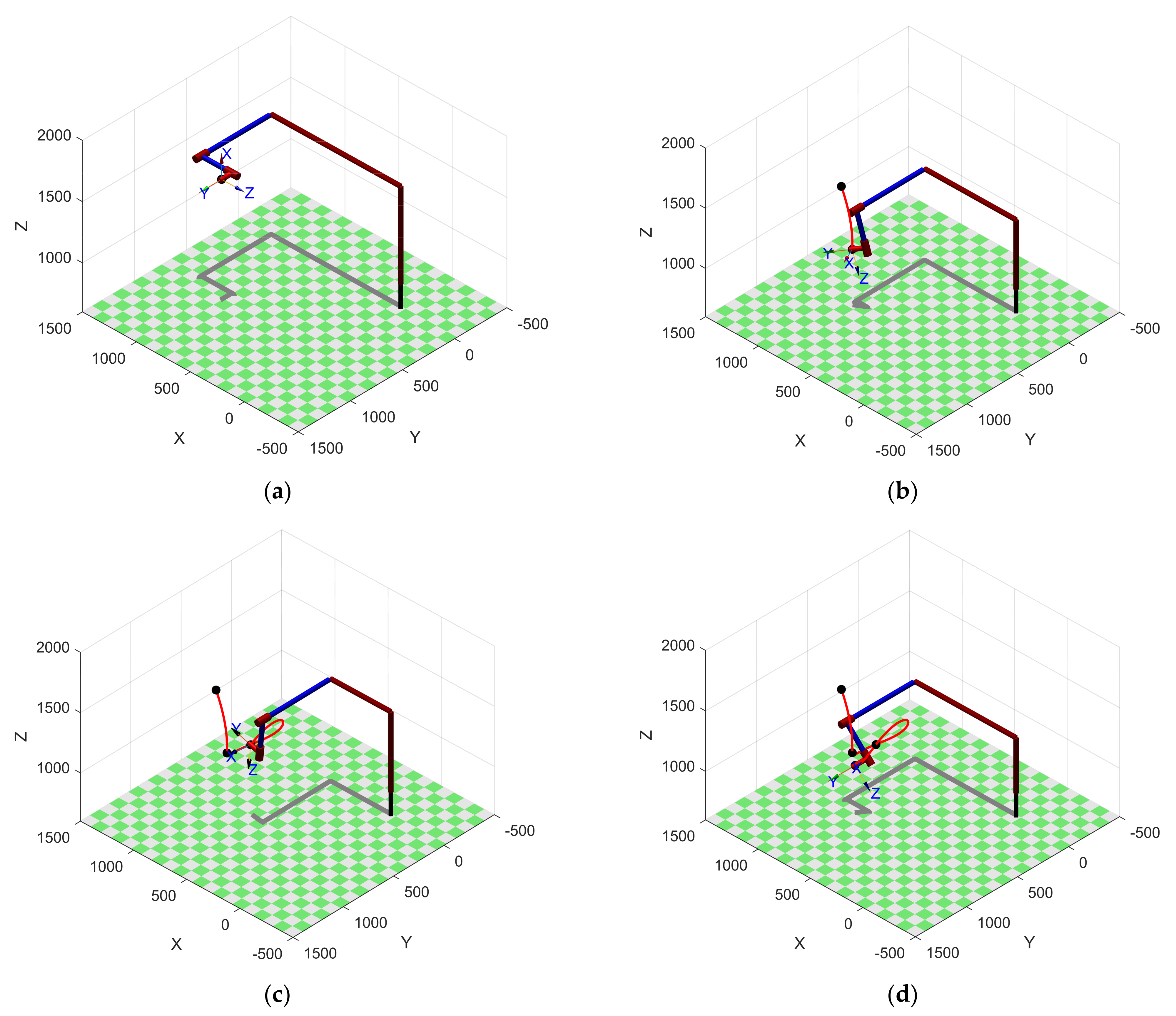
3.3. Simulation Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, J.; Yang, L.; Liu, H. Green and efficient processing of wood with supercritical CO2: A Review. Appl. Sci. 2021, 11, 3929. [Google Scholar] [CrossRef]
- Medvedev, S.; Mokhirev, A.; Rjabova, T. Methodical approach to increase efficiency of use of wood resource potential of the region. In Proceedings of the IOP Conference Series: Earth and Environmental Science, Saint Petersburg, Russia, 22–24 May 2019. [Google Scholar]
- Pantscharowitsch, M.; Kromoser, B. Influence of machining parameters on subtractive manufacturing of elementary geometries in glued-laminated timber using an industrial robot. Wood Mater. Sci. Eng. 2023, 18, 472–490. [Google Scholar] [CrossRef]
- Ji, M.; Zhang, W.; Diao, X.; Wang, G.; Miao, H. Intelligent automation manufacturing for Betula solid timber based on machine Vision detection and optimization grading system applied to building materials. Forests 2023, 14, 1510. [Google Scholar] [CrossRef]
- Cunha, J.; Ferreira, R.; Lau, N. Computer vision and robotic manipulation for automated feeding of cork drillers. Mater. Des. 2015, 82, 290–296. [Google Scholar] [CrossRef]
- Rossander, M.; Lideskog, H. Design and implementation of a control system for an autonomous reforestation machine using finite state machines. Forests 2023, 14, 1340. [Google Scholar] [CrossRef]
- Zhu, Y.; Qiao, J.; Guo, L. Adaptive sliding mode disturbance observer-based composite control with prescribed performance of space manipulators for target capturing. IEEE Trans. Ind. Electron. 2018, 66, 1973–1983. [Google Scholar] [CrossRef]
- Junge, K.; Hughes, J.; Thuruthel, T.G.; Iida, F. Improving robotic cooking using batch Bayesian optimization. IEEE Robot. Autom. Lett. 2020, 5, 760–765. [Google Scholar] [CrossRef]
- Kim, Y.J.; Cheng, S.; Kim, S.; Iagnemma, K. A stiffness-adjustable hyper redundant manipulator using a variable neutral-line mechanism for minimally invasive surgery. IEEE Trans. Robot. 2014, 30, 382–395. [Google Scholar] [CrossRef]
- Abdelsalam, A.; Happonen, A.; Kärhä, K.; Kapitonov, A.; Porras, J. Toward autonomous vehicles and machinery in mill yards of the forest industry: Technologies and proposals for autonomous vehicle operations. IEEE Access 2020, 10, 88234–88250. [Google Scholar] [CrossRef]
- Qiao, W.; Wang, Z.; Wang, D.; Zhang, L. A new mortise and tenon timber structure and its automatic construction system. J. Build. Eng. 2021, 44, 103369. [Google Scholar] [CrossRef]
- Gao, R.; Zhang, W.; Wang, G.; Wang, X. Experimental research on motion analysis model and trajectory planning of GLT palletizing robot. Buildings 2023, 13, 966. [Google Scholar] [CrossRef]
- Zhao, J.; Wang, S.; Jiang, A.; Xiao, J.; Wang, B. Trajectory planning of 6-dof manipulator based on gaussian process regression method. Int. J. Robot. Autom. 2020, 35, 209–220. [Google Scholar] [CrossRef]
- Huang, J.; Hu, P.; Wu, K.; Zeng, M. Optimal time-jerk trajectory planning for industrial robots. Mech. Mach. Theory 2018, 121, 530–544. [Google Scholar] [CrossRef]
- Stilman, M. Global manipulation planning in robot joint space with task constraints. IEEE Trans. Robot. 2010, 26, 576–584. [Google Scholar] [CrossRef]
- Xu, W.; Li, C.; Wang, X.; Liu, Y.; Liang, B.; Xu, Y. Study on non-holonomic cartesian path planning of a free-floating space robotic system. Adv. Robot. 2009, 23, 113–143. [Google Scholar] [CrossRef]
- Thompson, S.E.; Patel, R.V. Formulation of joint trajectories for industrial robots using B-splines. IEEE Trans. Ind. Electron. 1987, 2, 192–199. [Google Scholar] [CrossRef]
- Gasparetto, A.; Boscariol, P.; Lanzutti, A.; Vidoni, R. Path planning and trajectory planning algorithms: A general overview. Mech. Mach. Sci. 2015, 29, 3–27. [Google Scholar]
- Gasparetto, A.; Zanotto, V. A new method for smooth trajectory planning of robot manipulators. Mech. Mach Theory 2007, 42, 455–471. [Google Scholar] [CrossRef]
- Zhang, X.; Xiao, F.; Tong, X.; Yun, J.; Liu, Y.; Sun, Y.; Tao, B.; Kong, J.; Xu, M.; Chen, B. Time optimal trajectory planning based on improved sparrow search algorithm. Front. Bioeng. Biotech 2022, 10, 852408. [Google Scholar]
- Wu, Y.; You, Y.; Jiang, J. New predictor-corrector methods based on piecewise polynomial interpolation for milling stability prediction. Mach. Sci. Technol. 2020, 24, 688–718. [Google Scholar] [CrossRef]
- Sun, J.; Han, X.; Zuo, Y.; Tian, S.; Song, J.; Li, S. Trajectory planning in joint space for a pointing mechanism based on a novel hybrid interpolation algorithm and NSGA-II algorithm. IEEE Access 2020, 8, 228628–228638. [Google Scholar] [CrossRef]
- Hu, X.; Wu, H.; Sun, Q.; Liu, J. Robot Time Optimal Trajectory Planning Based on Improved Simplified Particle Swarm Optimization Algorithm. IEEE Access 2023, 11, 44496–44508. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools. Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef] [PubMed]
- Mirjalili, S.; Lewis, A. The whale optimization algorithm. Adv. Eng. Softw. 2016, 95, 51–67. [Google Scholar] [CrossRef]
- Xue, J.; Shen, B. A novel swarm intelligence optimization approach: Sparrow search algorithm. Syst. Sci. Control Eng. 2020, 8, 22–34. [Google Scholar] [CrossRef]
- Mazhoud, I.; Hadj-Hamou, K.; Bigeon, J.; Joyeux, P. Particle swarm optimization for solving engineering problems: A new constraint-handling mechanism. Eng. Appl. Artif. Intell. 2013, 26, 1263–1273. [Google Scholar] [CrossRef]
- Fang, S.; Ru, Y.; Liu, Y.; Hu, C.; Chen, X.; Liu, B. Route planning of helicopters spraying operations in multiple forest areas. Forests 2021, 12, 1658. [Google Scholar] [CrossRef]
- Zhao, J.; Zhu, X.; Song, T. Serial manipulator time-jerk optimal trajectory planning based on hybrid IWOA-PSO algorithm. IEEE Access 2022, 10, 6592–6604. [Google Scholar] [CrossRef]
- Kamel, M.A.; Yu, X.; Zhang, Y. Real-time fault-tolerant formation control of multiple WMRs based on hybrid GA–PSO algorithm. IEEE Trans. Autom. Sci. Eng. 2020, 18, 1263–1276. [Google Scholar] [CrossRef]
- Song, Q.; Yu, L.; Li, S.; Hanajima, N.; Zhang, X.; Pu, R. Energy dispatching based on an improved PSO-ACO algorithm. Int. J. Intell. Syst. 2023, 2023, 3160184. [Google Scholar] [CrossRef]
- Tanyildizi, E.; Demir, G. Golden sine algorithm: A novel math-inspired algorithm. Adv. Electr. Comput. Eng. 2017, 17, 71–78. [Google Scholar] [CrossRef]
- Singh, A.; Singla, A.; Soni, S. Extension of DH parameter method to hybrid manipulators used in robot-assisted surgery. Proc. Inst. Mech. Eng. Part H 2015, 229, 703–712. [Google Scholar] [CrossRef]
- Eberhart, R.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the IEEE 6th International Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar]
- Hu, W.; Li, S. A simpler and more effective particle swarm optimization algorithm. J. Softw. 2007, 18, 861–868. (In Chinese) [Google Scholar] [CrossRef]
- Varol Altay, E.; Alatas, B. Bird swarm algorithms with chaotic mapping. Artif. Intell. Rev. 2020, 53, 1373–1414. [Google Scholar] [CrossRef]
- Hu, S.; Liu, H.; Feng, Y.; Cui, C.; Ma, Y.; Zhang, G.; Huang, X. Tool Wear Prediction in Glass Fiber Reinforced Polymer Small-Hole Drilling Based on an improved circle chaotic mapping grey wolf algorithm for bp neural network. Appl. Sci. 2023, 13, 2811. [Google Scholar] [CrossRef]
- Chauhan, P.; Deep, K.; Pant, M. Novel inertia weight strategies for particle swarm optimization. Memet. Comput. 2013, 5, 229–251. [Google Scholar] [CrossRef]
- Fan, E. Extended tanh-function method and its applications to nonlinear equations. Phys. Lett. A 2000, 277, 212–218. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef]
- Jin, Y. Surrogate-assisted evolutionary computation: Recent advances and future challenges. Swarm Evol. Comput. 2011, 1, 61–70. [Google Scholar] [CrossRef]
- Corke, P.I. A robotics toolbox for MATLAB. IEEE Robot. Autom. Mag. 1996, 3, 24–32. [Google Scholar] [CrossRef]
- Xu, J.; Ren, C.; Chang, X. Robot time-optimal trajectory planning based on quintic polynomial interpolation and improved Harris Hawks algorithm. Axioms 2023, 12, 245. [Google Scholar] [CrossRef]
- Yang, J.; Liu, R.; Tong, Q.; Yang, X.; Liu, Q.; Yao, A. Multi-objective optimization of LCC-S-compensated IPT system for improving misalignment tolerance. Appl. Sci. 2023, 13, 3666. [Google Scholar] [CrossRef]
- Jin, R.; Rocco, P.; Geng, Y. Cartesian trajectory planning of space robots using a multi-objective optimization. Aerosp. Sci. Technol. 2021, 108, 106360. [Google Scholar] [CrossRef]
- Hosseini, S.M.; Peer, A. Wood products manufacturing optimization: A survey. IEEE Access 2022, 10, 121653–121683. [Google Scholar] [CrossRef]
- Kunic, A.; Naboni, R.; Kramberger, A.; Schlette, C. Design and assembly automation of the robotic reversible timber beam. Autom. Constr. 2021, 123, 103531. [Google Scholar] [CrossRef]
- Dong, W.; Xiong, X.; Ma, Y.; Yue, X. Woodworking tool wear condition monitoring during milling based on power signals and a particle swarm optimization-back propagation neural network. Appl. Sci. 2021, 11, 9026. [Google Scholar] [CrossRef]
- Mukherjee, S.; Kumar, R.; Borah, S. An intelligent fast controller for autonomous wheeled robot path navigation in challenging environments. Ind. Robot 2022, 50, 107–121. [Google Scholar] [CrossRef]
- Wang, F.; Xie, B.; Lü, E.; Zeng, Z.; Mei, S.; Ma, C.; Guo, J. Design of a Moisture content detection system for yinghong no. 9 tea leaves based on machine vision. Appl. Sci. 2023, 13, 1806. [Google Scholar] [CrossRef]
- Ji, W.; Chen, G.; Xu, B.; Meng, X.; Zhao, D. Recognition method of green pepper in greenhouse based on least-squares support vector machine optimized by the improved particle swarm optimization. IEEE Access 2019, 7, 119742–119754. [Google Scholar] [CrossRef]
- Qiu, H.; Zhang, H.; Lei, K.; Hu, X.; Yang, T.; Jiang, X. A New Tree-Level Multi-Objective Forest Harvest Model (MO-PSO): Integrating Neighborhood Indices and PSO algorithm to improve the optimization effect of spatial structure. Forests 2023, 14, 441. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Joint i | θi (rad) | di (mm) | αi−1 (rad) | ai−1 (mm) | Joint Range |
|---|---|---|---|---|---|
| 1 | −π/2 | d1 | 0 | 0 | 0–1000 mm |
| 2 | π/2 | d2 | −π/2 | 0 | 0–1500 mm |
| 3 | θ3 | d3 | −π/2 | 0 | −180°–180° |
| 4 | θ4 | d4 | π/2 | 0 | −180°–180° |
| Function | Range | Dimension | Optimal Value |
|---|---|---|---|
| [−100, 100] | 30 | 0 | |
| [−10, 10] | 30 | 0 | |
| [−100, 100] | 30 | 0 | |
| [−100, 100] | 30 | 0 | |
| [−1.28, 1.28] | 30 | 0 | |
| [−32, 32] | 30 | 0 | |
| [−600, 600] | 30 | 0 | |
u = | [−50,50] | 30 | 0 |
| Function | PSO | CFPSO | SPSO | Gold-SA | GoldS-PSO | |
|---|---|---|---|---|---|---|
| F1 | Mean | 3.73248 × 101 | 0.12322 × 101 | 6.4918 × 10−190 | 0 | 0 |
| Best | 2.43271 × 101 | 5.3919 × 10−1 | 2.5027 × 10−190 | 0 | 0 | |
| Std | 0.46358 × 101 | 0.39174 × 101 | 1.4048 × 10−189 | 0 | 0 | |
| F2 | Mean | 2.59152 × 101 | 0.31992 × 101 | 7.6576 × 10−96 | 1.3191 × 10−259 | 0 |
| Best | 2.31681 × 101 | 0.17982 × 101 | 3.6225 × 10−96 | 0 | 0 | |
| Std | 0.16301 × 101 | 8.0076 × 10−1 | 2.852 × 10−96 | 0 | 0 | |
| F3 | Mean | 0.23978 × 101 | 9.964 × 10−1 | 1.3423 × 10−95 | 2.4626 × 10−214 | 0 |
| Best | 0.20577 × 101 | 8.1201 × 10−1 | 1.2058 × 10−95 | 0 | 0 | |
| Std | 1.2016 × 10−1 | 1.1032 × 10−1 | 5.1565 × 10−97 | 0 | 0 | |
| F4 | Mean | 3.58749 × 101 | 0.12009 × 101 | 0.53438 × 101 | 6.3772 × 10−5 | 3.0695 × 10−5 |
| Best | 2.7984 × 101 | 5.26 × 10−1 | 0.4776 × 101 | 2.7074 × 10−7 | 2.3277 × 10−7 | |
| Std | 0.49812 × 101 | 4.6943 × 10−1 | 4.2675 × 10−1 | 1.6428 × 10−4 | 3.52212 × 10−5 | |
| F5 | Mean | 1.5867973 × 103 | 0.75091 × 101 | 1.3191 × 10−1 | 4.141 × 10−5 | 2.9164 × 10−5 |
| Best | 1.0118771 × 103 | 0.28872 × 101 | 2.3587 × 10−2 | 3.9512 × 10−6 | 1.0577 × 10−6 | |
| Std | 3.269182 × 102 | 0.38832 × 101 | 7.6126 × 10−2 | 5.6872 × 10−5 | 2.3199 × 10−5 | |
| F6 | Mean | 0.38518 × 101 | 0.16354 × 101 | 7.8752 × 10−15 | 8.8818 × 10−16 | 8.8818 × 10−16 |
| Best | 0.35918 × 101 | 7.1535 × 10−1 | 4.4409 × 10−15 | 8.8818 × 10−16 | 8.8818 × 10−16 | |
| Std | 1.15 × 101 | 4.6235 × 10−1 | 6.4863 × 10−16 | 0 | 0 | |
| F7 | Mean | 8.6704 × 10−1 | 5.0136 × 10−2 | 1.1211 × 10−1 | 0 | 0 |
| Best | 7.7332 × 10−1 | 1.5054 × 10−2 | 0 | 0 | 0 | |
| Std | 4.6326 × 10−2 | 2.0134 × 10−2 | 2.6264 × 10−1 | 0 | 0 | |
| F8 | Mean | 0.56774 × 101 | 3.2971 × 10−1 | 0.31016 × 101 | 9.1171 × 10−5 | 9.823× 10−5 |
| Best | 0.30884 × 101 | 1.4755 × 10−1 | 0.26321 × 101 | 1.0629 × 10−7 | 1.3947 × 10−77 | |
| Std | 8.3954 × 10−1 | 1.0153 × 10−1 | 3.8235 × 10−1 | 2.5837 × 10−4 | 1.0078 × 10−4 | |
| Joint | A | B | B | D |
|---|---|---|---|---|
| 1 | 0.800 m | 0.578 m | 0.688 m | 0.459 m |
| 2 | 1.200 m | 0.868 m | 0.567 m | 0.964 m |
| 3 | 3.141 rad | 1.897 rad | 1.468 rad | 2.355 rad |
| 4 | 0.000 rad | 1.047 rad | 1.771 rad | 0.754 rad |
| Algorithm | Joint | Ttotal | t1 | t2 | t3 |
|---|---|---|---|---|---|
| PSO | 1 | 7.2210 | 1.7301 | 3.5905 | 1.9008 |
| 2 | 7.4472 | 2.0576 | 2.2782 | 3.0889 | |
| 3 | 7.0339 | 2.6648 | 2.3479 | 2.0272 | |
| 4 | 6.9658 | 2.0908 | 2.5381 | 2.3368 | |
| Gold-SA | 1 | 7.1210 | 1.9488 | 3.1077 | 2.0645 |
| 2 | 7.5203 | 2.2059 | 2.2647 | 3.0497 | |
| 3 | 6.9526 | 2.4483 | 2.4637 | 2.0406 | |
| 4 | 7.1518 | 2.3862 | 2.4097 | 2.3560 | |
| GoldS-PSO | 1 | 7.0672 | 2.1107 | 2.9540 | 2.0025 |
| 2 | 7.2177 | 2.0009 | 2.6121 | 2.6047 | |
| 3 | 6.8970 | 2.3189 | 2.5846 | 1.9935 | |
| 4 | 6.8713 | 2.0205 | 2.5096 | 2.3412 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Zhang, C.; Yi, J. Time-Optimal Trajectory Planning for Woodworking Manipulators Using an Improved PSO Algorithm. Appl. Sci. 2023, 13, 10482. https://doi.org/10.3390/app131810482
Chen S, Zhang C, Yi J. Time-Optimal Trajectory Planning for Woodworking Manipulators Using an Improved PSO Algorithm. Applied Sciences. 2023; 13(18):10482. https://doi.org/10.3390/app131810482
Chicago/Turabian StyleChen, Sihan, Changqing Zhang, and Jiaping Yi. 2023. "Time-Optimal Trajectory Planning for Woodworking Manipulators Using an Improved PSO Algorithm" Applied Sciences 13, no. 18: 10482. https://doi.org/10.3390/app131810482
APA StyleChen, S., Zhang, C., & Yi, J. (2023). Time-Optimal Trajectory Planning for Woodworking Manipulators Using an Improved PSO Algorithm. Applied Sciences, 13(18), 10482. https://doi.org/10.3390/app131810482