
Dynamics Analysis of Space Netted Pocket System Capturing Non-Cooperative Target


Abstract
:1. Introduction
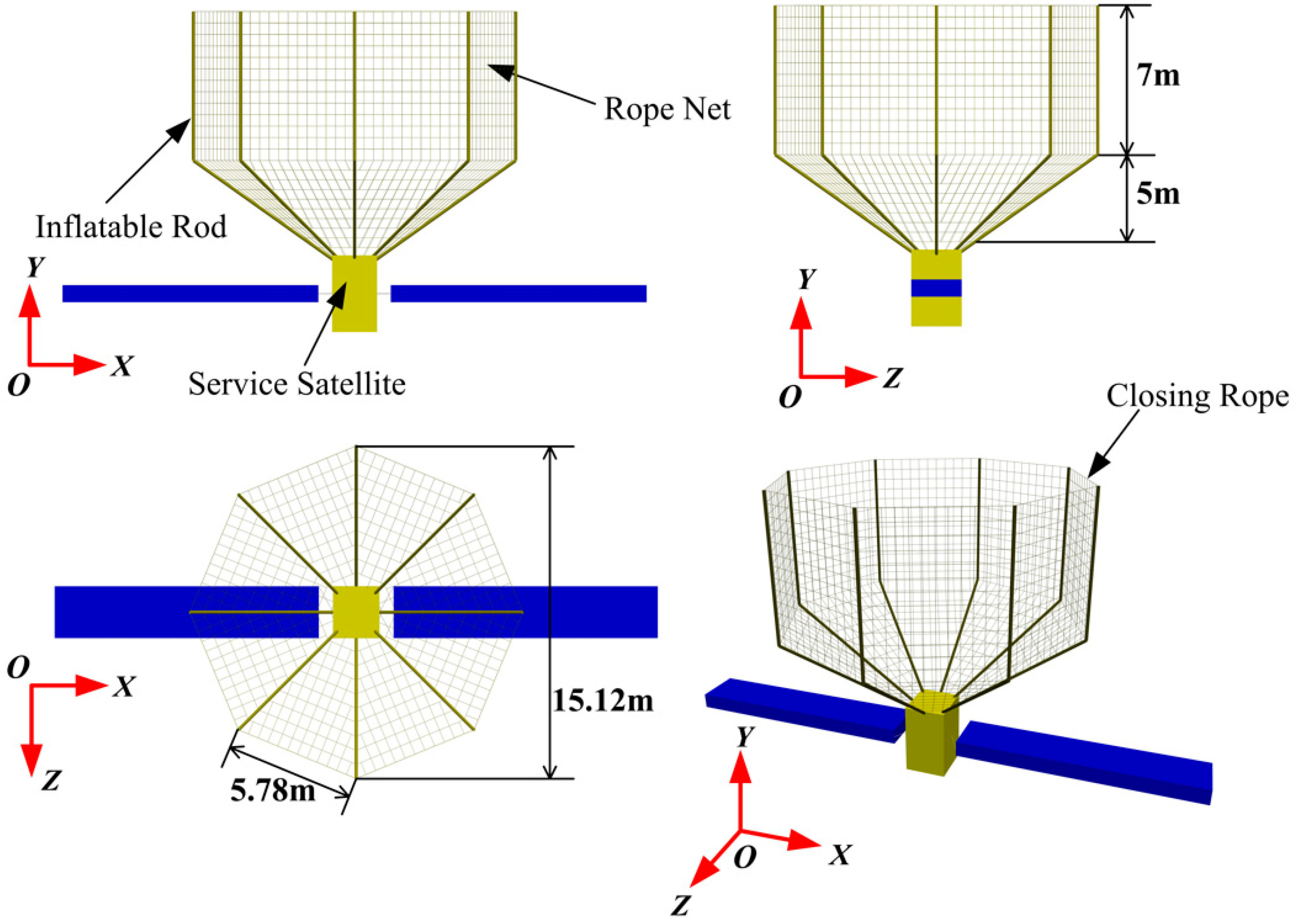
2. Structure of the Space Netted Pocket System
3. Dynamics Modeling of Space Netted Pocket
3.1. Dynamics Model of the Closing Ropes
3.2. Dynamics Model of the Rope Netted System Based on ANCF
3.3. Contact Collision Force Model
4. Dynamic Simulation and Results
4.1. Parameters of the Service Spacecraft and Captured Target
4.2. Simulation Results and Discussion
5. Conclusions
- (1)
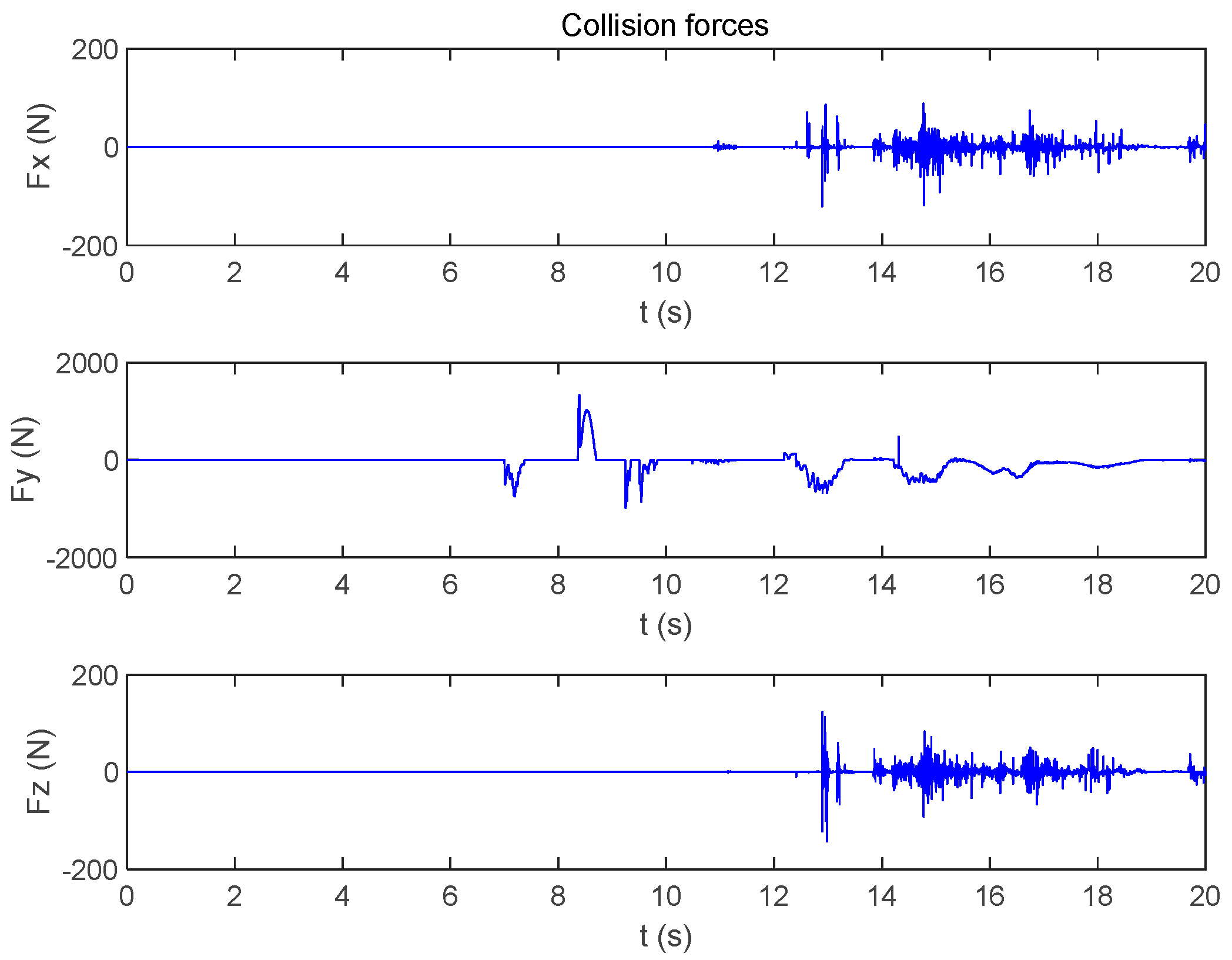
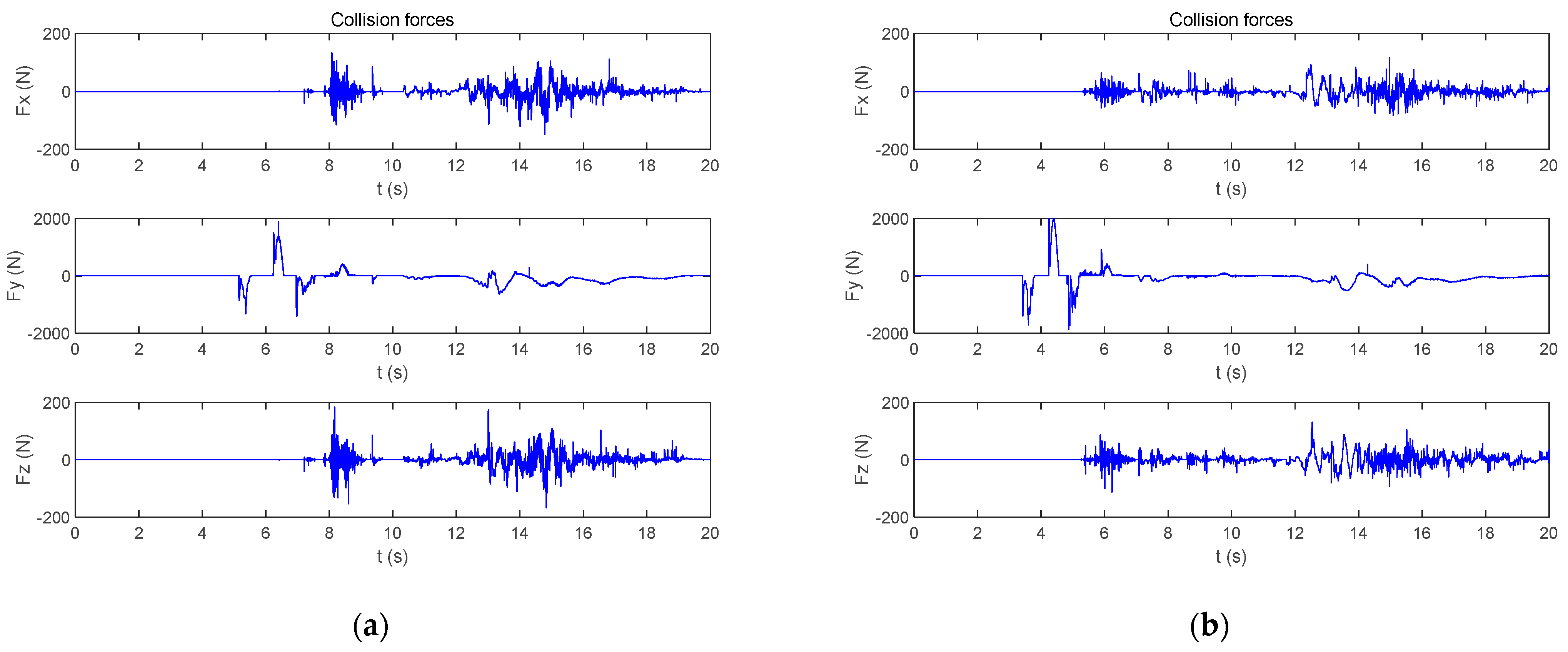
- The target contacts and collides with the rope net in the capturing process, which is subjected to contact and collision forces. The collision force in the Y direction is larger than the collision forces in the X and Z directions when capturing the target. The maximum collision force occurs before the end of the closing phase. Furthermore, there is continuous contact and collision between the service spacecraft and target in the towing phase. However, in the towing phase, the collision force on the target is decreased obviously.
- (2)
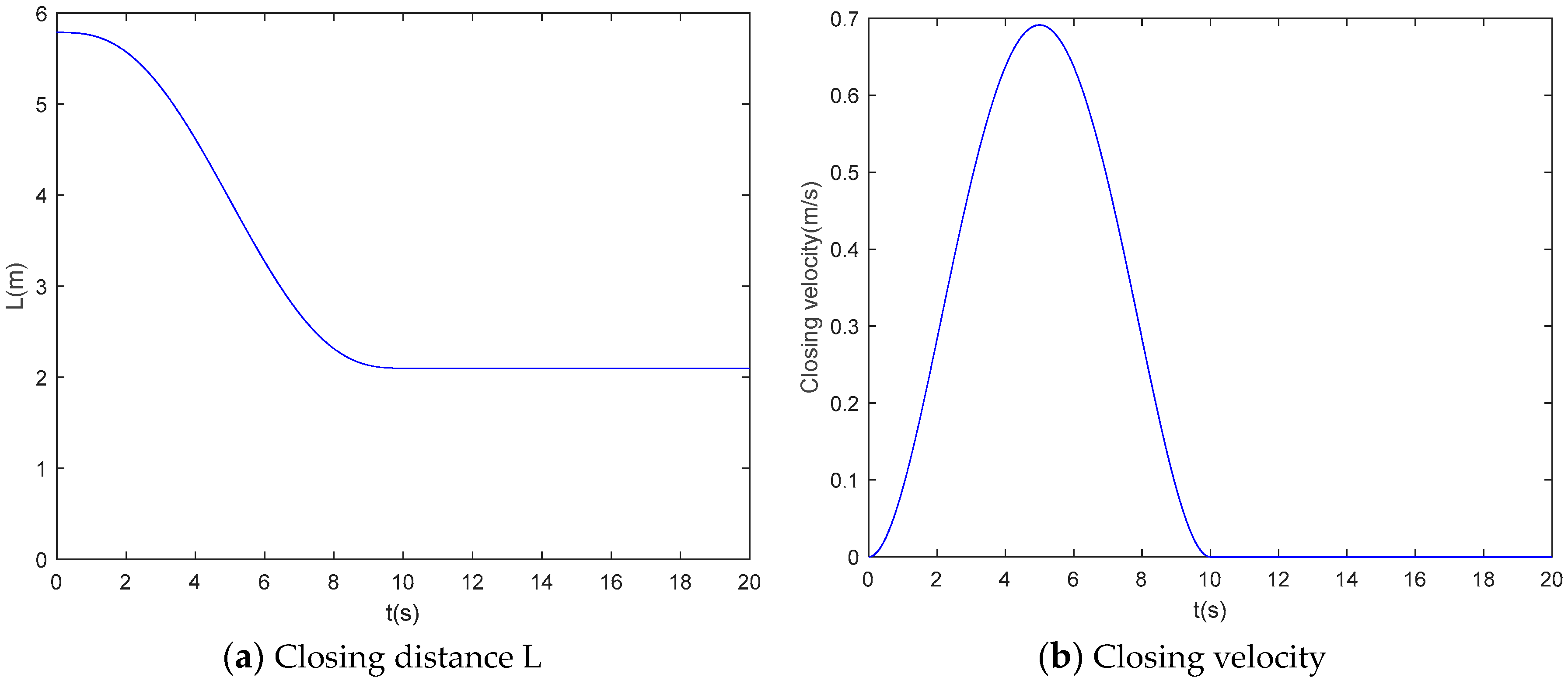
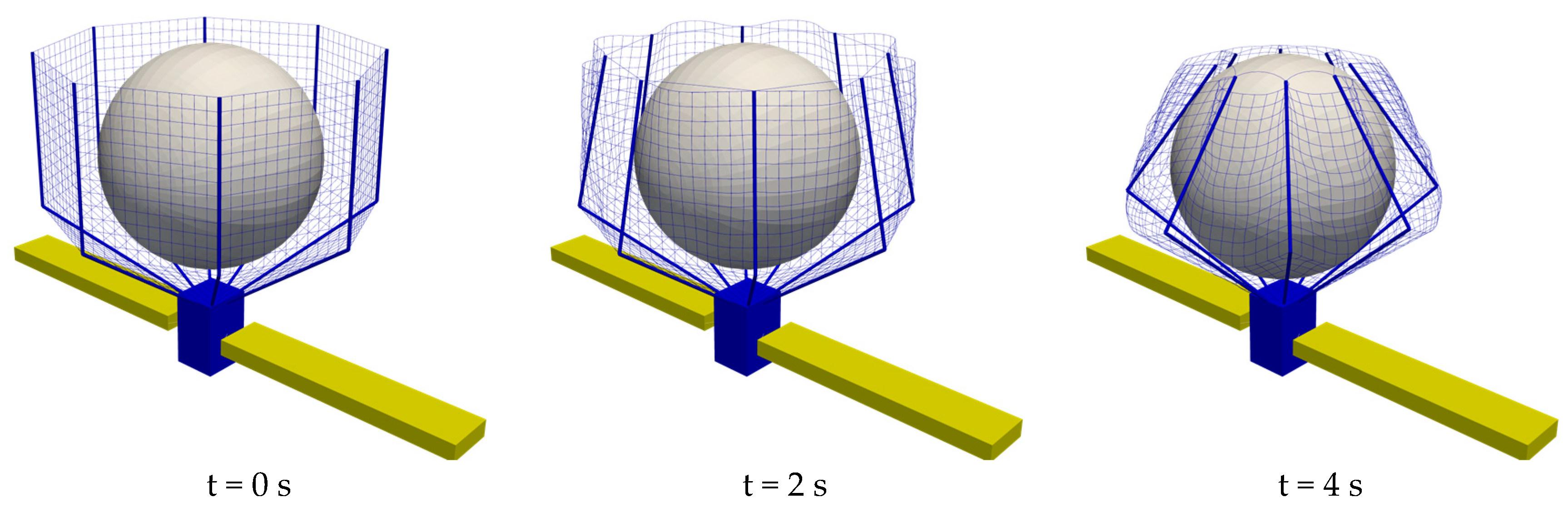
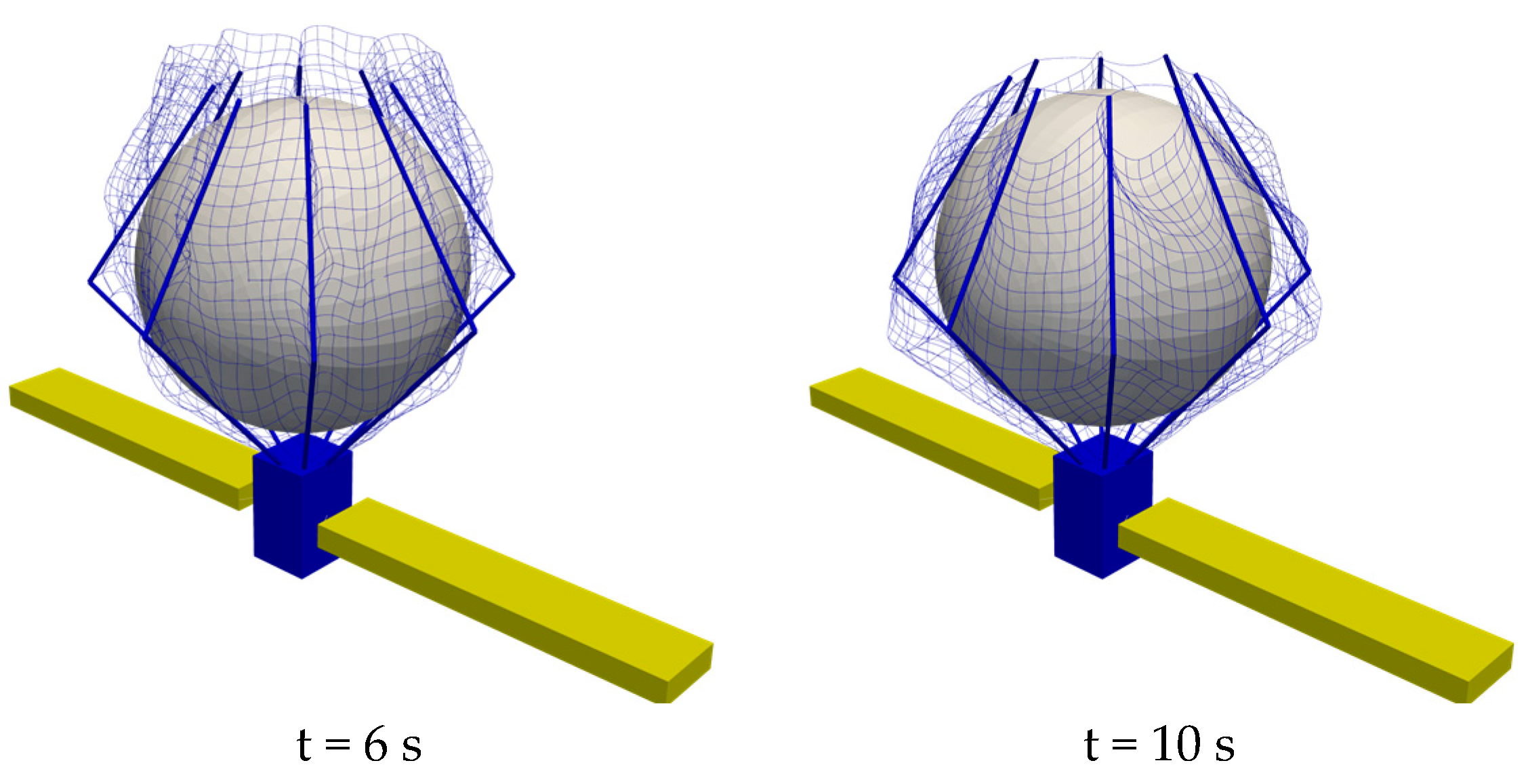
- When the closing time is decreased, the collision forces in the Y direction are larger and the first collision appears earlier. However, the collision forces in the X and Z directions appear after the closing phase, and their amplitude is not significantly affected by the closing time.
- (3)
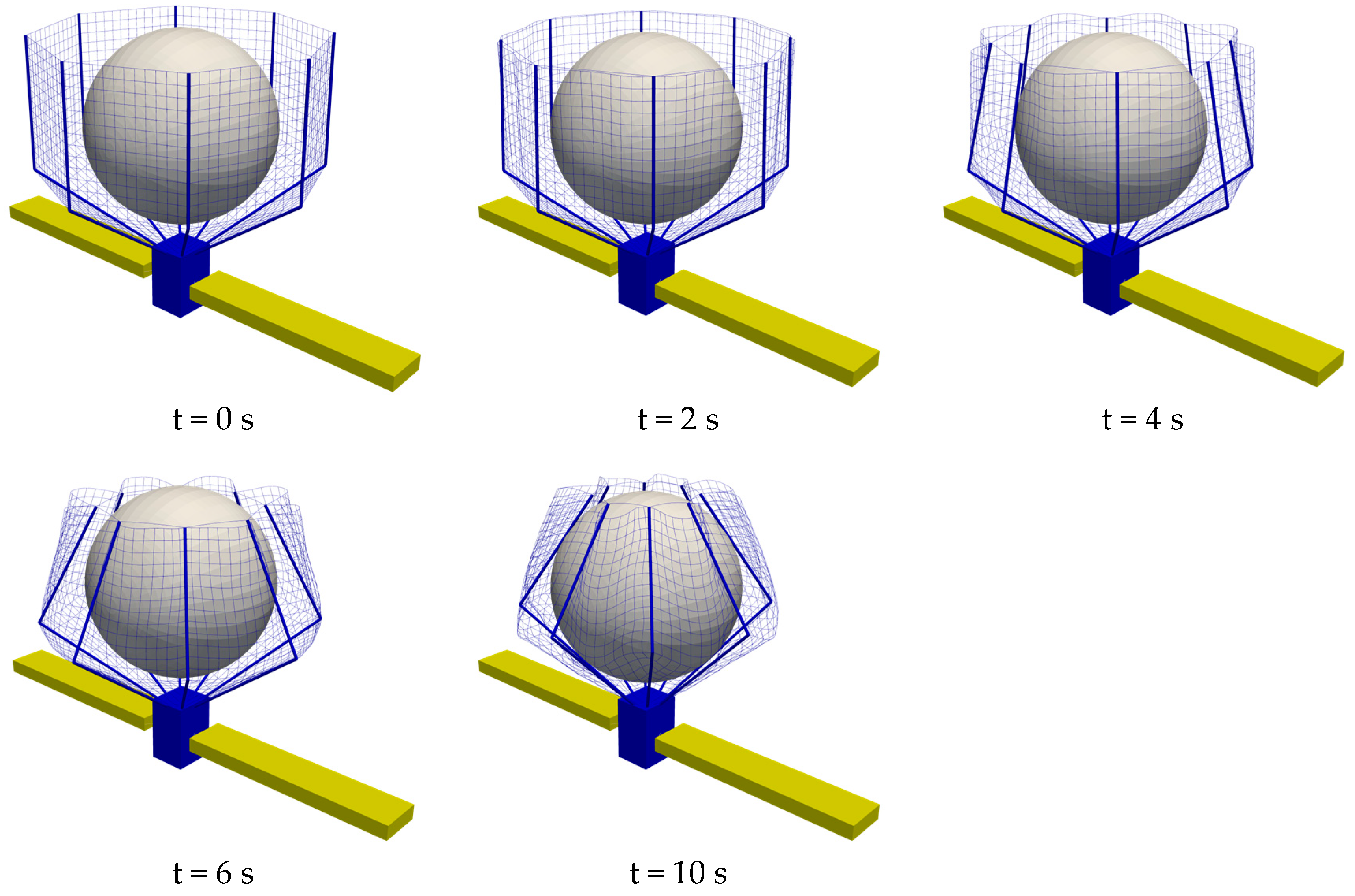
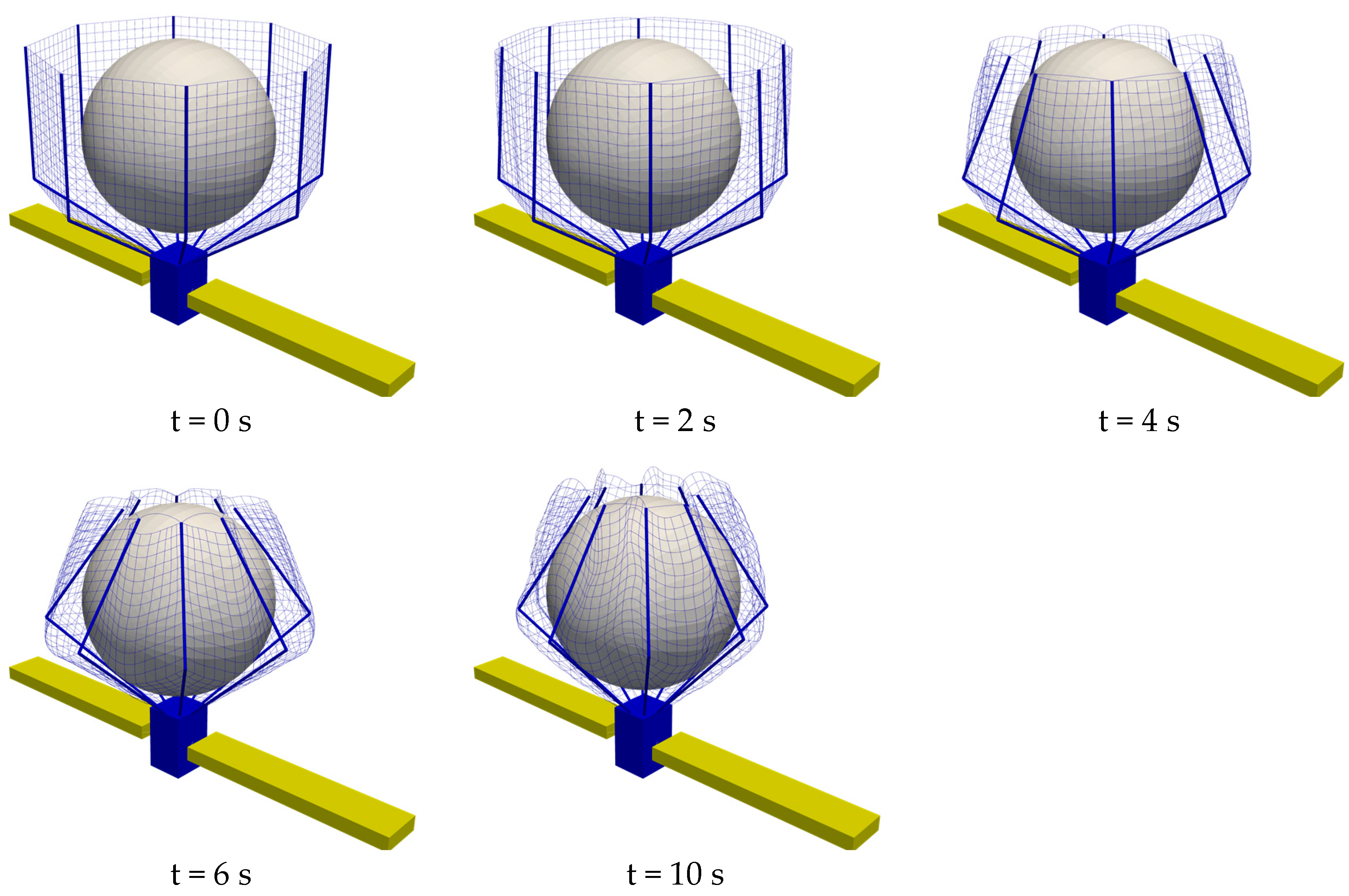
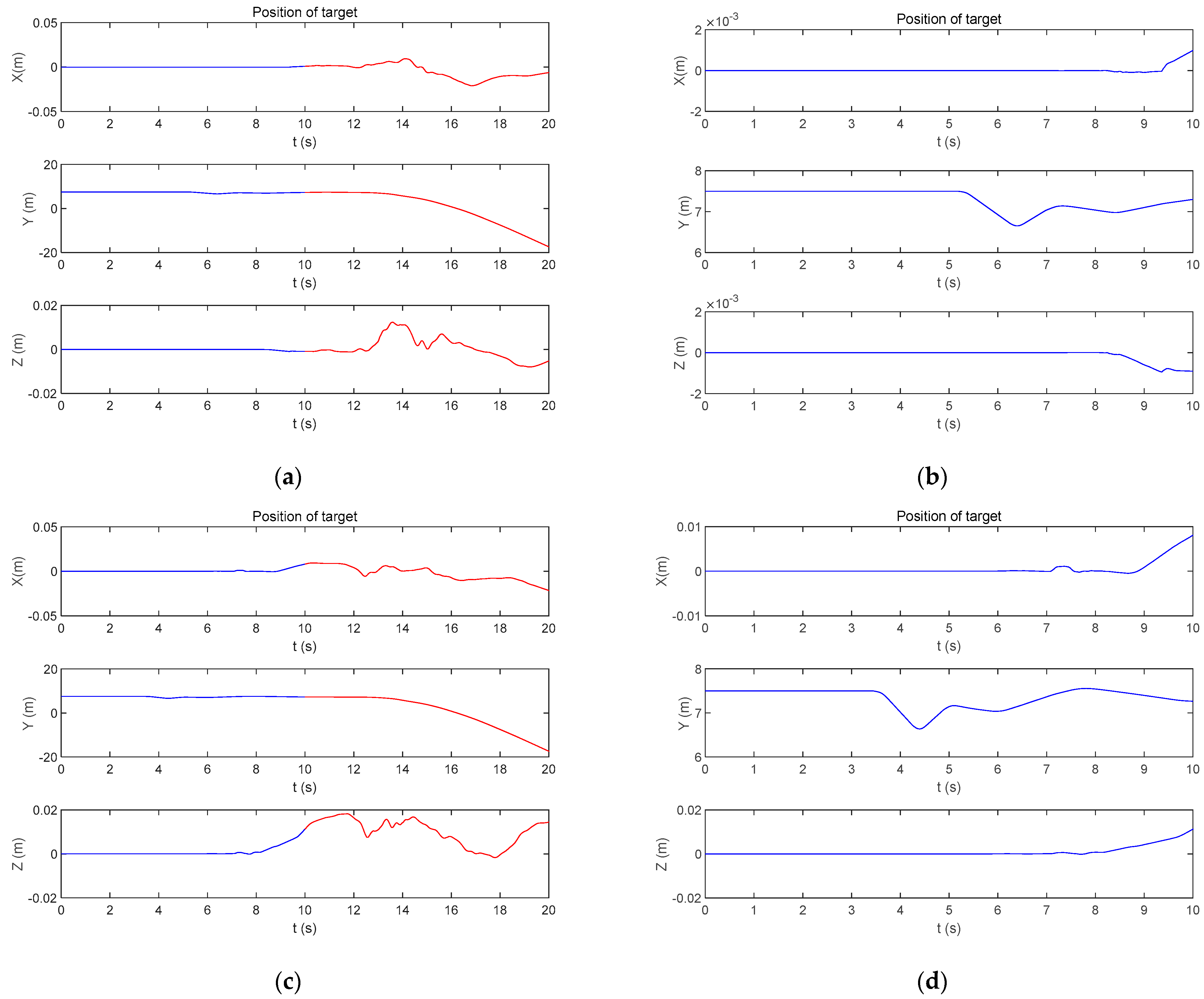
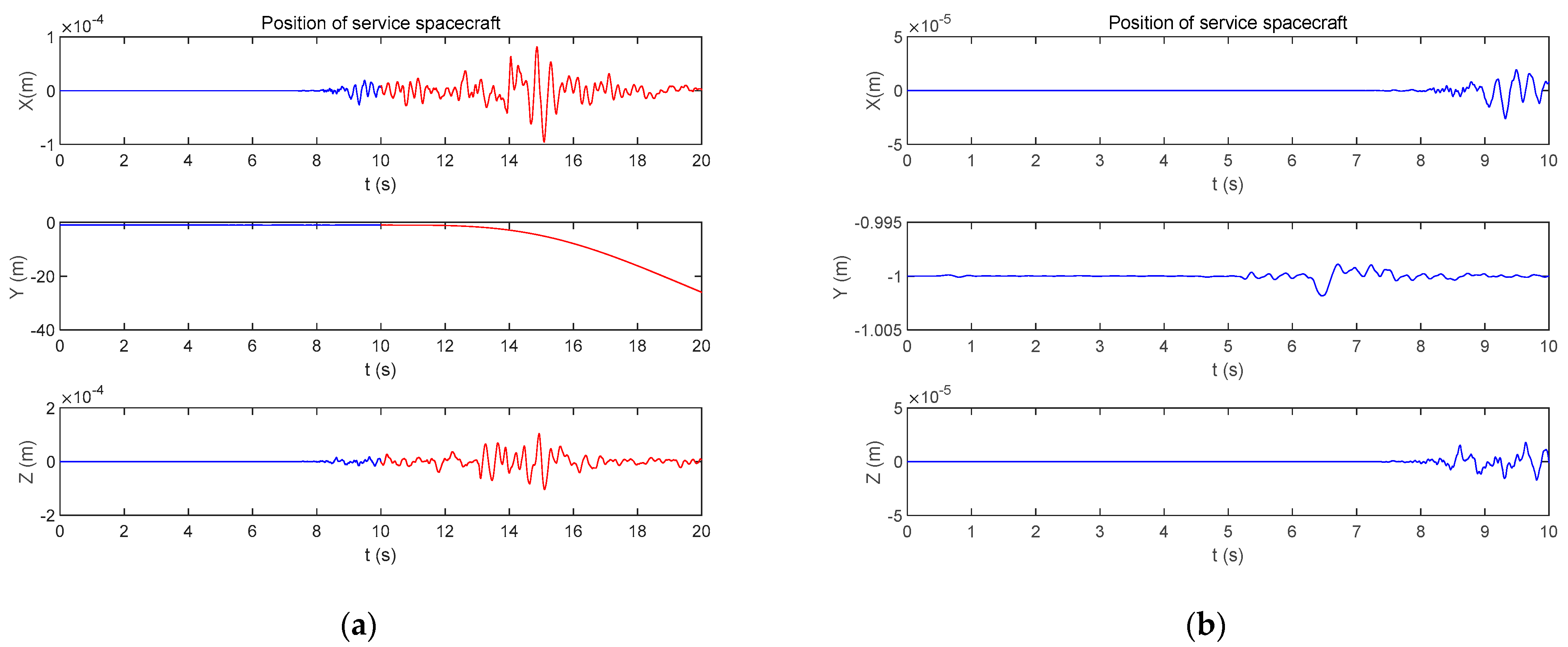
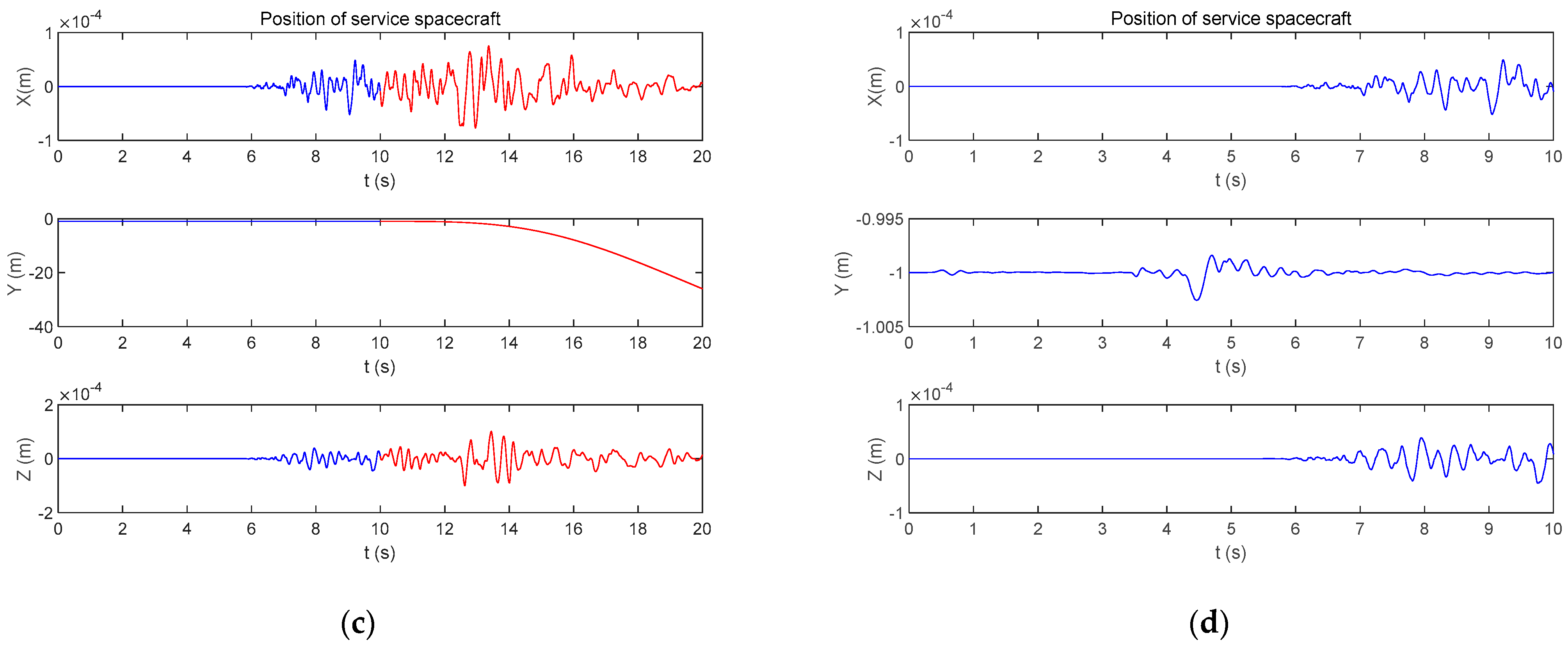
- Different cases show similar phenomena, which indicates that the target is captured successfully for different capture strategies. The positions of the center of mass of the target and the service spacecraft still stay before the contact and collision between target and the rope net of the capturing phase of each case. After the closing phase is completed, the service spacecraft tows the target and the service spacecraft and target move together in the Y direction. Furthermore, in the towing phase, the positions of the center of mass in the X and Z directions are not changed obviously, which is represented by the small magnitude for the spacecraft and target. This is due to the slight contact and collision between the spacecraft and the captured target.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Murtaza, A.; Pirzada, S.J.H.; Xu, T.; Jianwei, L. Orbital debris threat for space sustainability and way forward. IEEE Access 2020, 8, 61000–61019. [Google Scholar] [CrossRef]
- Barmin, I.V.; Dunham, D.W.; Kulagin, V.P.; Savinykh, V.P.; Tsvetkov, V.Y. Rings of debris in near-Earth space. Sol. Syst. Res. 2014, 48, 593–600. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. Review and comparison of active space debris capturing and removal methods. Prog. Aerosp. Sci. 2016, 80, 18–32. [Google Scholar] [CrossRef]
- Aglietti, G.S.; Taylor, B.; Fellowes, S.; Salmon, T.; Retat, I.; Hall, A.; Chabot, T.; Pisseloup, A.; Cox, C.; Mafficini, A.; et al. The active space debris removal mission remove debris. Part 2: In orbit operations. Acta Astronaut. 2020, 168, 310–322. [Google Scholar] [CrossRef]
- Campbell, J.; Hughes, K.; Vignjevic, R.; Djordjevic, N.; Taylor, N.; Jardine, A. Development of modelling design tool for harpoon for active space debris removal. Int. J. Impact Eng. 2022, 166, 104236. [Google Scholar] [CrossRef]
- Wang, D.; Huang, P.; Meng, Z. Coordinated stabilization of tumbling targets using tethered space manipulators. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2420–2432. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.; Wang, X.; Zhou, X.; An, J.; Li, Y. TDE-based adaptive integral sliding mode control of space manipulator for space-debris active removal. Aerospace 2022, 9, 105. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, F.; Huang, P. Dynamic Closing Point Determination for Space Debris Capturing via Tethered Space Net Robot. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 4251–4260. [Google Scholar] [CrossRef]
- Miles, C.; Botta, E.M.; Sharf, I. Simulation and Tension Control of a Tether-Actuated Closing Mechanism for Net-Based Capture of Space Debris. In Proceedings of the 70th International Astronautical Congress, IAC 2019, Baku, Azerbaijan, 2–6 October 2019; International Astronautical Federation, IAF: Washington, DC, USA, 2019; Volume 2019. [Google Scholar]
- Woods, C.T.; Boonrath, A.; Gold, R.; Botta, E.M. Validation of Simulation of Space Net Deployment and Target Capture with Parabolic Flight Experiment Data. In AIAA SCITECH 2022 Forum; AIAA SciTech Forum; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2021. [Google Scholar]
- Zhao, Y.; Huang, P.; Zhang, F.; Meng, Z. Contact dynamics and control for tethered space net robot. IEEE Trans. Aerosp. Electron. Syst. 2018, 55, 918–929. [Google Scholar] [CrossRef]
- Huang, W.; Zou, H.; Liu, H.; Yang, W.; Gao, J.; Liu, Z. Contact dynamic analysis of tether-net system for space debris capture using incremental potential formulation. Adv. Space Res. 2023, 72, 2039–2050. [Google Scholar] [CrossRef]
- Zhu, W.; Pang, Z.; Si, J.; Gao, G. Dynamics and configuration control of the Tethered Space Net Robot under a collision with high-speed debris. Adv. Space Res. 2022, 70, 1351–1361. [Google Scholar] [CrossRef]
- Huang, P.; Zhang, F.; Ma, J.; Meng, Z.; Liu, Z. Dynamics and configuration control of the maneuvering-net space robot system. Adv. Space Res. 2015, 55, 1004–1014. [Google Scholar] [CrossRef]
- Meng, Z.; Huang, P.; Guo, J. Approach modeling and control of an autonomous maneuverable space net. IEEE Trans. Aerosp. Electron. Syst. 2017, 53, 2651–2661. [Google Scholar] [CrossRef]
- Liu, H.; Wei, C.; Zhao, Y.; Li, S.; Liu, Y.; Tan, C. Dynamic Analysis of the Inflatable Net System for Space Capture. In Proceedings of the 9th International Conference on Mechanical and Aerospace Engineering, ICMAE 2018, Budapest, Hungary, 10–13 July 2018; Institute of Electrical and Electronics Engineers Inc.: Budapest, Hungary, 2018; pp. 199–203. [Google Scholar]
- Tang, C.; Huang, Z.; Wei, C.; Zhao, Y. Dynamic and sliding mode control of space netted pocket system capturing and attitude maneuver non-cooperative target. Mech. Sci. 2022, 13, 751–760. [Google Scholar] [CrossRef]
- Benvenuto, R.; Lavagna, M.R. Flexible capture devices for medium to large debris active removal: Simulations results to drive experiments. In Proceedings of the 12th Symposium on Advanced Space Technologies in Automation and Robotics, Noordwijk, The Netherlands, 15–17 May 2013; ASTRA: Noordwijk, The Netherlands, 2013; pp. 1–8. [Google Scholar]
- Benvenuto, R.; Salvi, S.; Lavagna, M. Dynamics analysis and GNC design of flexible systems for space debris active removal. Acta Astronaut. 2015, 110, 247–265. [Google Scholar] [CrossRef]
- Gerstmayr, J.; Shabana, A.A. Analysis of Thin Beams and Cables Using the Absolute Nodal Coordinate Formulation. Nonlinear Dyn. 2006, 45, 109–130. [Google Scholar] [CrossRef]
- Wei, C.; Liu, H.; Tan, C.; Liu, Y.; Zhao, Y. Rapid attitude maneuver of the space tether net capture system using active disturbance rejection control. Mech. Sci. 2019, 10, 575–587. [Google Scholar] [CrossRef]
- Chen, Q.; Zhang, Q.; Tang, Q.; Gao, Q. Research on space net control based on fixed-force tear rope. J. Astronaut. 2018, 39, 1332–1339. [Google Scholar]
- Botta, E.M.; Sharf, I.; Misra, A.K.; Teichmann, M. On the simulation of tether-nets for space debris capture with Vortex Dynamics. Acta Astronaut. 2016, 123, 91–102. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E.; Gołębiowski, W. Validation of space net deployment modeling methods using parabolic flight experiment. J. Guid. Control Dyn. 2017, 40, 3319–3327. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. An analysis of the flexibility modeling of a net for space debris removal. Adv. Space Res. 2020, 65, 1083–1094. [Google Scholar] [CrossRef]
- Zhang, G.B.; Zheng, G.B.; Feng, Z.W.; Chen, Q.Q. Design and Simulation of a Non-Cooperative Target Capture Scheme Based on Throwing Rope. In Proceedings of the 4th IAA Conference on Dynamics and Control of Space Systems, DYCOSS 2018, Changsha, China, 21–23 May 2018; Univelt Inc.: Changsha, China, 2018; Volume 165, pp. 2061–2070. [Google Scholar]
- Wang, Q.; Jin, D.; Rui, X. Dynamic Simulation of Space Debris Cloud Capture Using the Tethered Net. Space Sci. Technol. 2021, 2021, 9810375. [Google Scholar] [CrossRef]
- Liang, X.; Zhao, Y.; Gu, H.; Wei, C. Design and Motion Control of Space Net Projectiles System. In Proceedings of the 36th Chinese Control Conference, CCC 2017, Dalian, China, 26–28 July 2017; IEEE Computer Society: Dalian, China, 2017; pp. 10298–10303. [Google Scholar]
- Apedo, K.L.; Ronel, S.; Jacquelin, E.; Bennani, A.; Massenzio, M. Nonlinear finite element analysis of inflatable beams made from orthotropic woven fabric. Int. J. Solids Struct. 2010, 47, 2017–2033. [Google Scholar] [CrossRef]
- Salama, M.; Kuo, C.P.; Lou, M. Simulation of deployment dynamics of inflatable structures. AIAA J. 2000, 38, 2277–2283. [Google Scholar] [CrossRef]
- Sun, J.; Jin, D.; Hu, H. Deployment dynamics and topology optimization of a spinning inflatable structure. Acta Mech. Sin. 2022, 38, 122100. [Google Scholar] [CrossRef]
- Khulief, Y.A.; Shabana, A.A. A continuous force model for the impact analysis of flexible multibody systems. Mech. Mach. Theory 1987, 22, 213–224. [Google Scholar] [CrossRef]
- Bai, Z.; Zhao, Y.; Tian, H. Study on contact dynamics for flexible multi-body system. J. Vib. Shock 2009, 28, 75–78. [Google Scholar]
- Shan, M.; Guo, J.; Gill, E. Deployment dynamics of tethered-net for space debris removal. Acta Astronaut. 2017, 132, 293–302. [Google Scholar] [CrossRef]
- Zhao, Y.; Huang, P.; Zhang, F. Deployment Dynamics of Tethered Space Net Based on Contact Behaviour. In Proceedings of the 2018 IEEE International Conference on Information and Automation, ICIA 2018, Wuyishan, China, 11–13 August 2018; Institute of Electrical and Electronics Engineers Inc.: Wuyishan, China, 2018; pp. 13–18. [Google Scholar]
- Huang, W.; He, D.; Li, Y.; Zhang, D.; Zou, H.; Liu, H.; Yang, W.; Qin, L.; Fei, Q. Nonlinear Dynamic Modeling of a Tether-Net System for Space Debris Capture. Nonlinear Dyn. 2022, 110, 2297–2315. [Google Scholar] [CrossRef]
- Si, J.; Pang, Z.; Du, Z.; Fu, J. Dynamics modeling and simulation of a net closing mechanism for tether-net capture. Int. J. Aerosp. Eng. 2021, 2021, 8827141. [Google Scholar] [CrossRef]
- Gołębiowski, W.; Michalczyk, R.; Dyrek, M.; Battista, U.; Wormnes, K. Validated simulator for space debris removal with nets and other flexible tethers applications. Acta Astronaut. 2016, 129, 229–240. [Google Scholar] [CrossRef]
- Botta, E.M.; Sharf, I.; Misra, A.K. Contact dynamic modeling and simulation of tether nets for space-debris capture. J. Guid. Control Dyn. 2017, 40, 110–123. [Google Scholar] [CrossRef]
- Shan, M.; Guo, J.; Gill, E. Contact dynamic models of space debris capturing using a net. Acta Astronaut. 2019, 158, 198–205. [Google Scholar] [CrossRef]
- Shabana, A.A. Dynamics of Multibody Systems, 5th ed.; Cambridge University Press: Cambridge, UK, 2020. [Google Scholar]
- Tsuji, Y.; Tanaka, T.; Ishida, T. Lagrangian Numerical Simulation of Plug Flow of Cohesionless Particle in a Horizontal Pipe. Powder Technol. 1992, 71, 239–250. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mass (kg) | Moment of Inertia (kg m2) | |||
|---|---|---|---|---|
| Ixx | Iyy | Izz | ||
| Spacecraft | 1210 | 4282 | 12,736 | 14,498 |
| Target | 200 | 1210 | 1210 | 1210 |
| Diameter (m) | Density (kg/m3) | Poisson Ratio | Modulus of Elasticity | |
|---|---|---|---|---|
| Nets | 0.004 | 1430 | 0.3 | 12 |
| Inflatable rods | 0.01 | 164 | 0.3 | 0.75 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, C.; Deng, Y.; Bai, Z.; Wei, C.; Zhao, Y. Dynamics Analysis of Space Netted Pocket System Capturing Non-Cooperative Target. Appl. Sci. 2023, 13, 10377. https://doi.org/10.3390/app131810377
Tang C, Deng Y, Bai Z, Wei C, Zhao Y. Dynamics Analysis of Space Netted Pocket System Capturing Non-Cooperative Target. Applied Sciences. 2023; 13(18):10377. https://doi.org/10.3390/app131810377
Chicago/Turabian StyleTang, Chao, Yingqiang Deng, Zhengfeng Bai, Cheng Wei, and Yang Zhao. 2023. "Dynamics Analysis of Space Netted Pocket System Capturing Non-Cooperative Target" Applied Sciences 13, no. 18: 10377. https://doi.org/10.3390/app131810377
APA StyleTang, C., Deng, Y., Bai, Z., Wei, C., & Zhao, Y. (2023). Dynamics Analysis of Space Netted Pocket System Capturing Non-Cooperative Target. Applied Sciences, 13(18), 10377. https://doi.org/10.3390/app131810377