
A Novel Charging Station on Overhead Power Lines for Autonomous Unmanned Drones

 ,
,  , and
, and
Abstract
:1. Introduction
2. Drone Charging Station Design and Development
- Overhead power line specifications
- Multirotor drone specifications
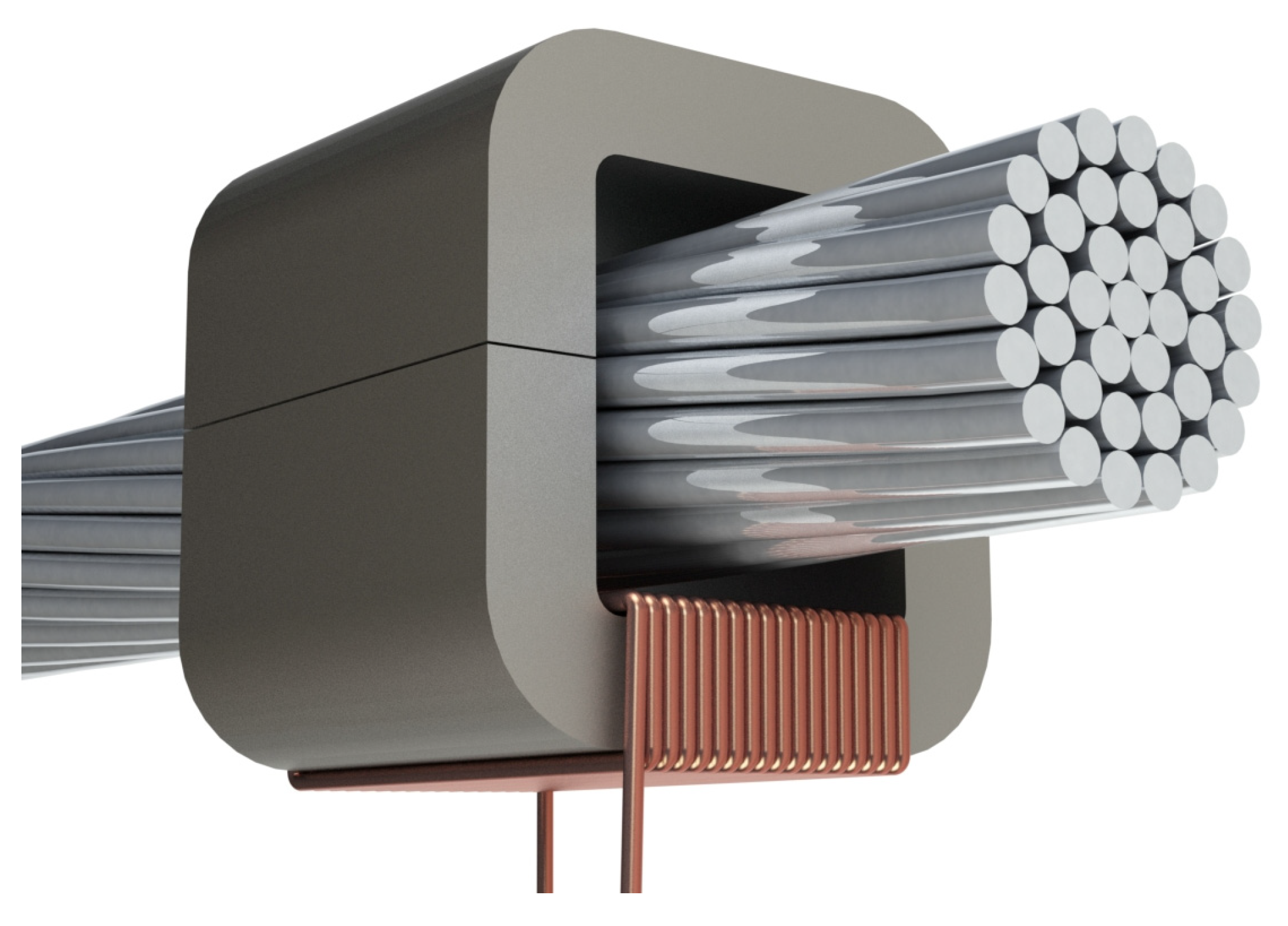
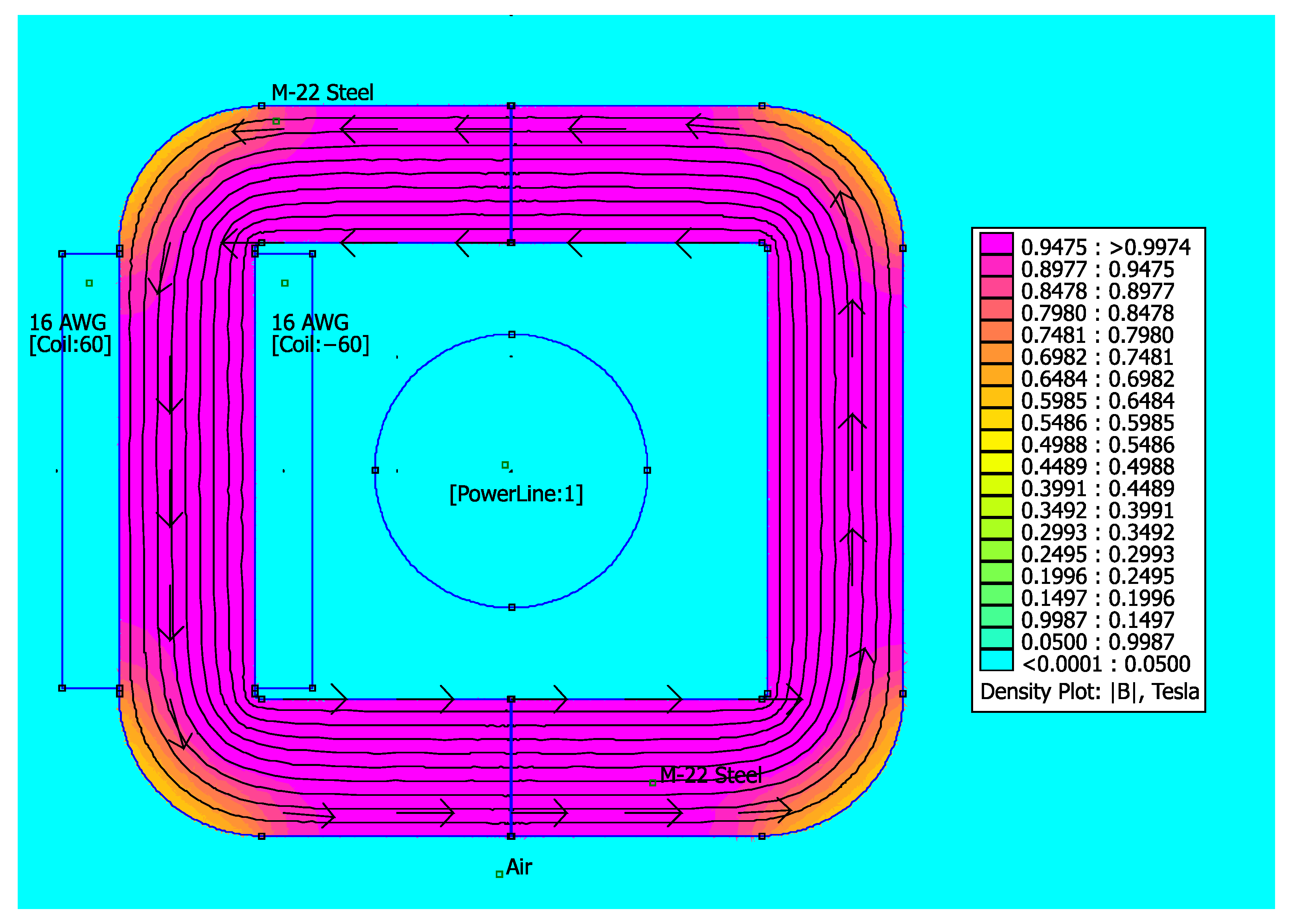
2.1. Energy Harvester
- A ferromagnetic core, which provides a path that concentrates the magnetic flux;
- The primary winding, which is actually the power line, powered by an AC source;
- A coil wound on the core (the secondary winding), which induces the current and receives energy from the primary winding to deliver it to the load.
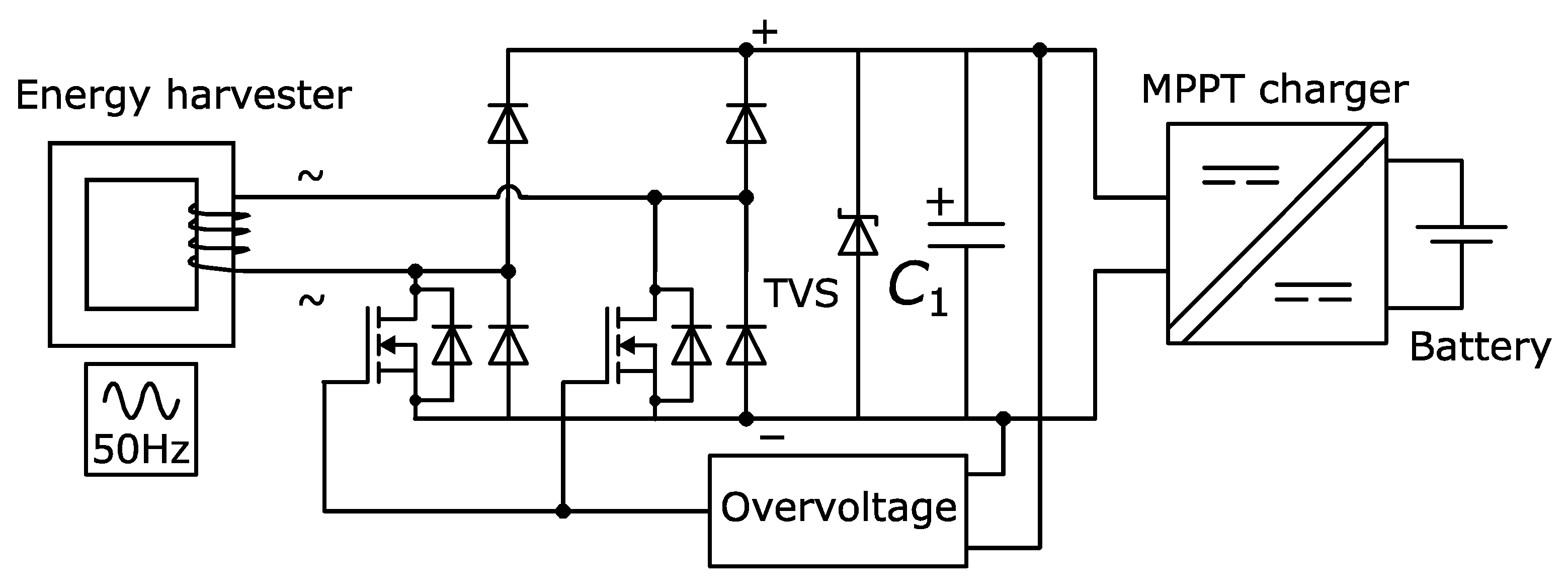
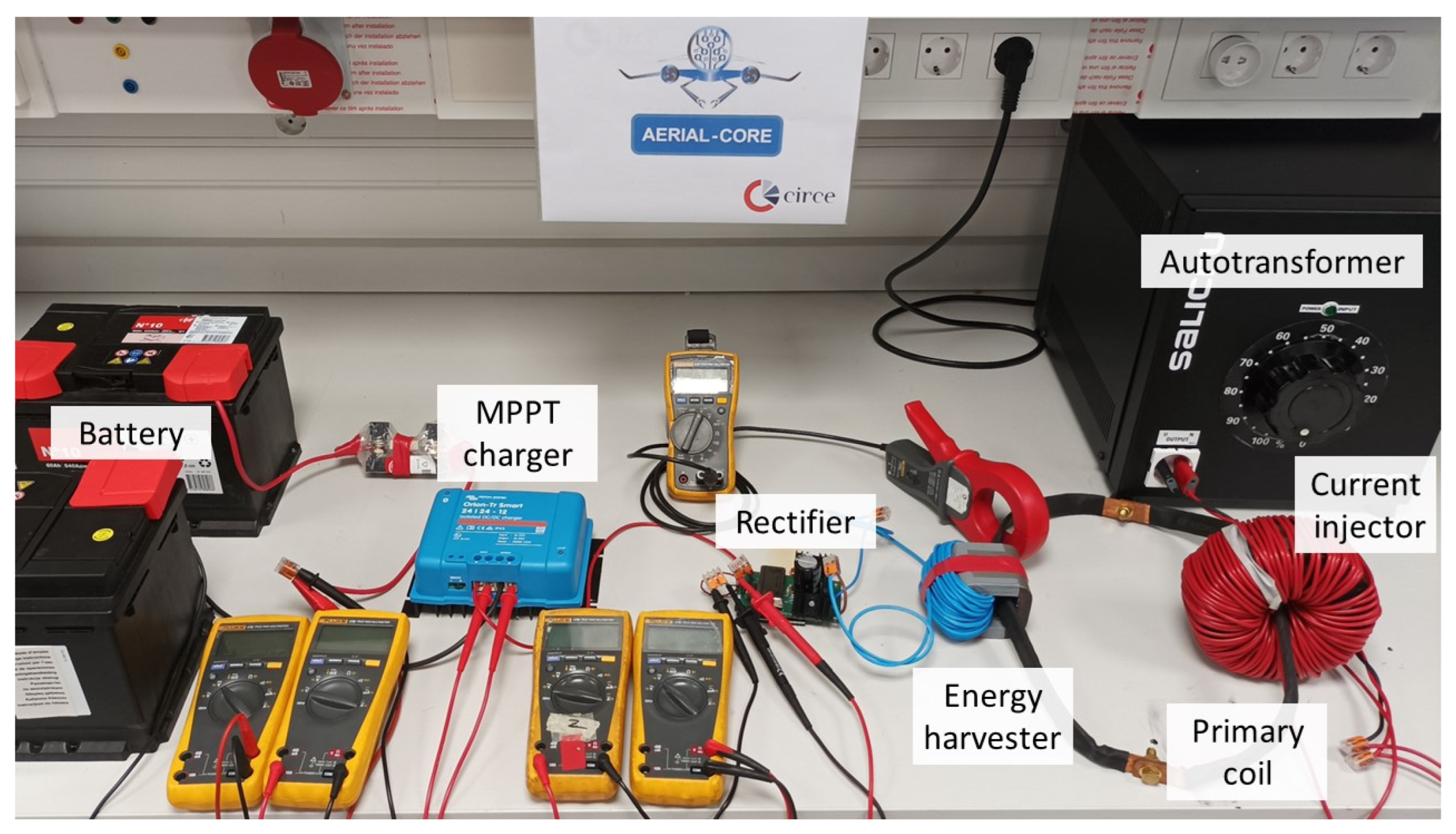
2.2. Power Electronics
- An electromagnetic induction energy harvester;
- A rectifier and overvoltage protection;
- A DC/DC converter with an MPPT charge controller.
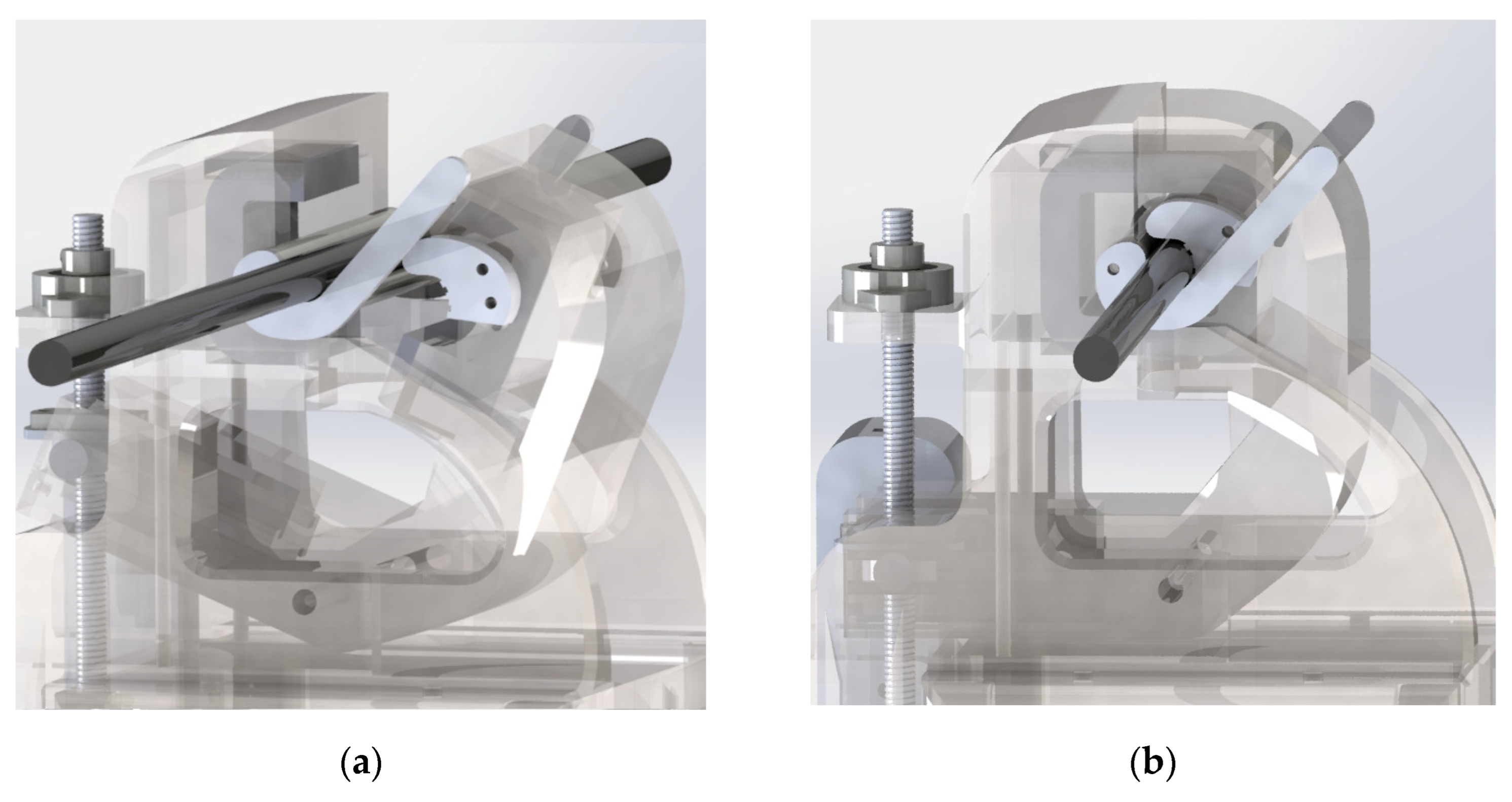
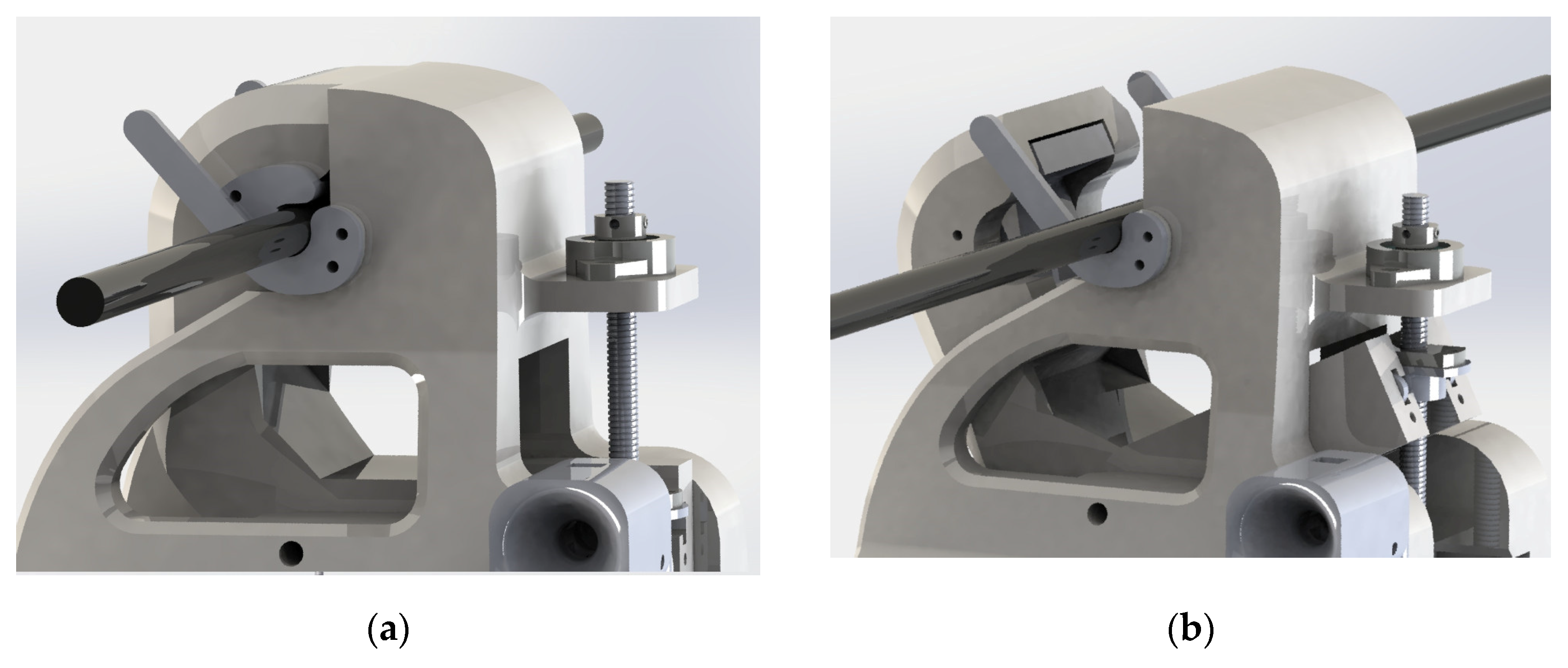
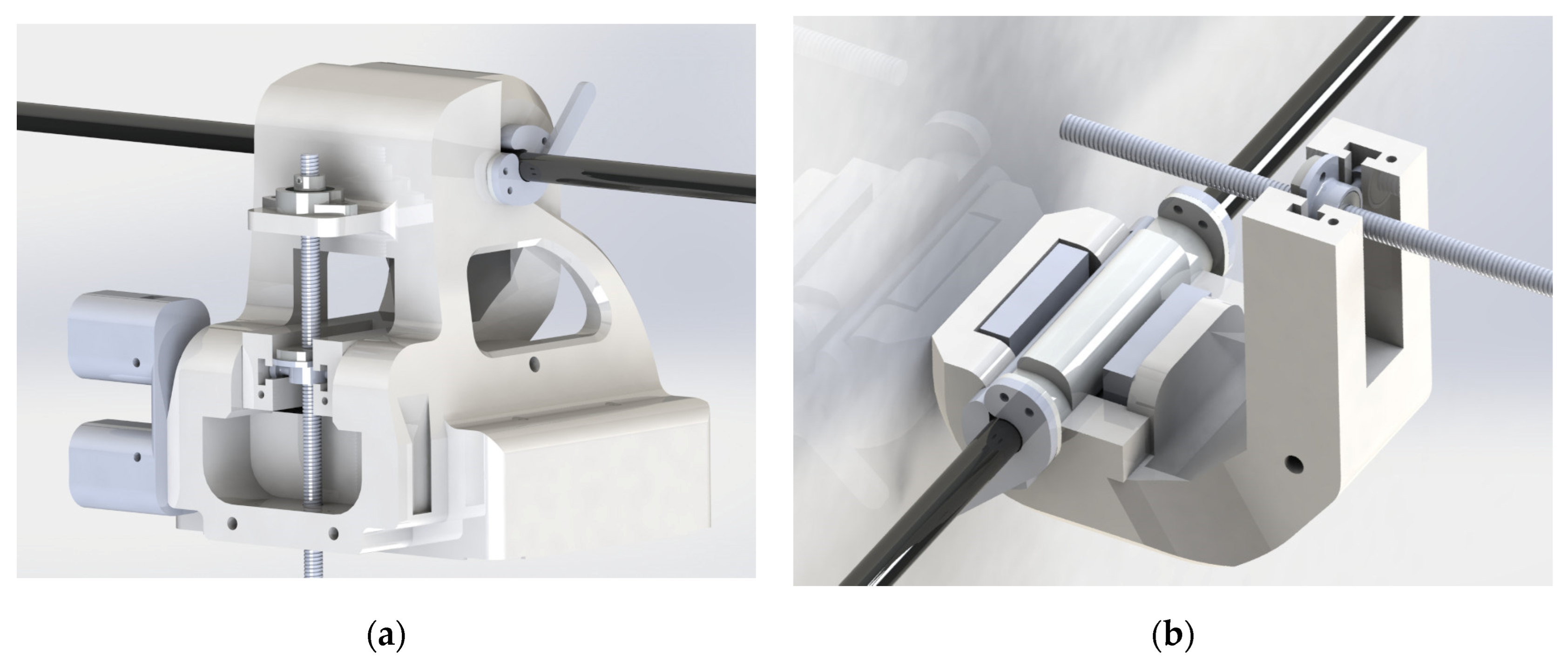
2.3. Mechanical Clamp Design
- Easy vertical docking of the charging station and the power cable;
- Low weight ≈ 5 kg;
- Strong clamping for harsh environments;
- Easy installation and robotic manipulation.

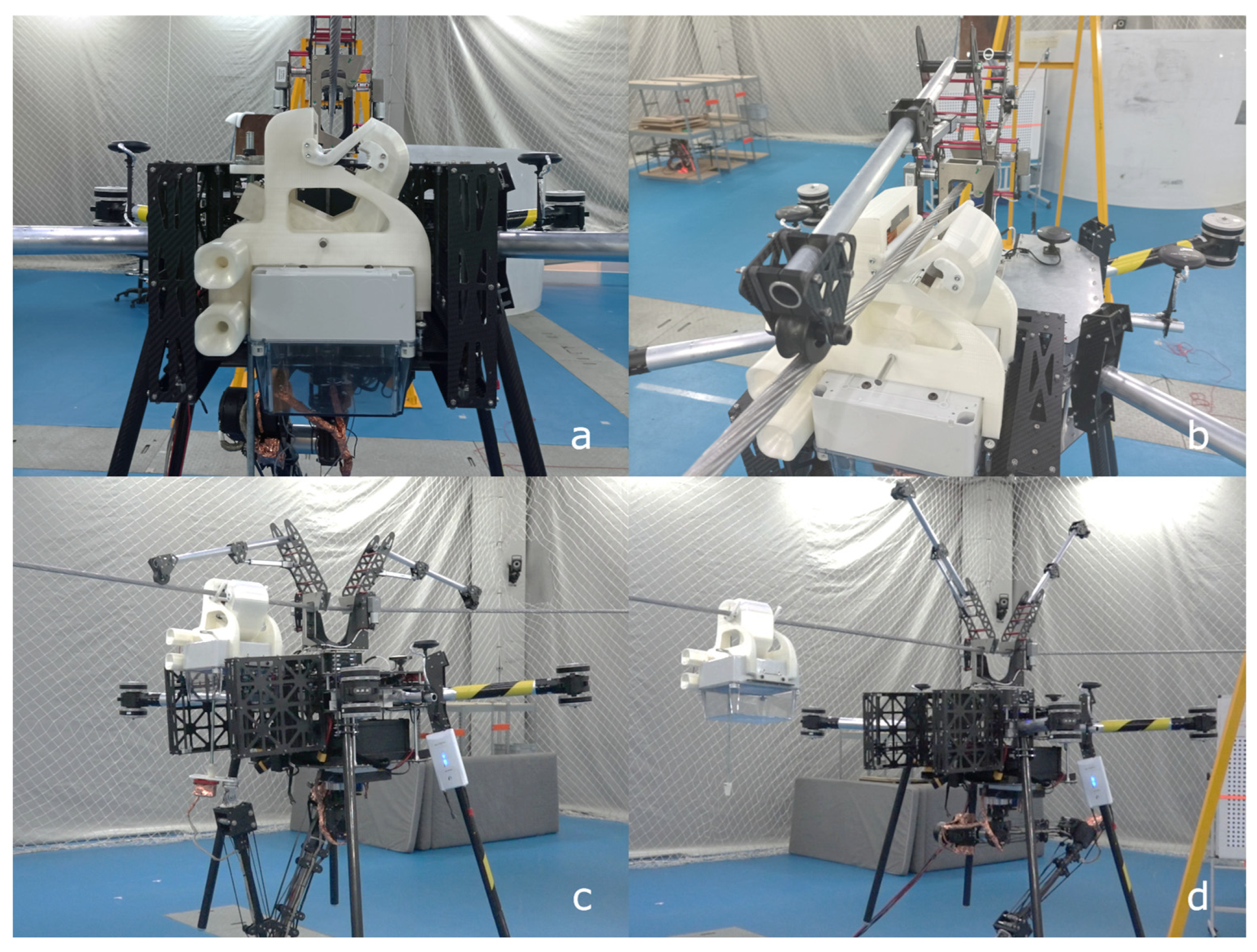
3. Unmanned Aerial Vehicle Manipulation
3.1. Perching Module
3.2. Manipulation Module
4. Results
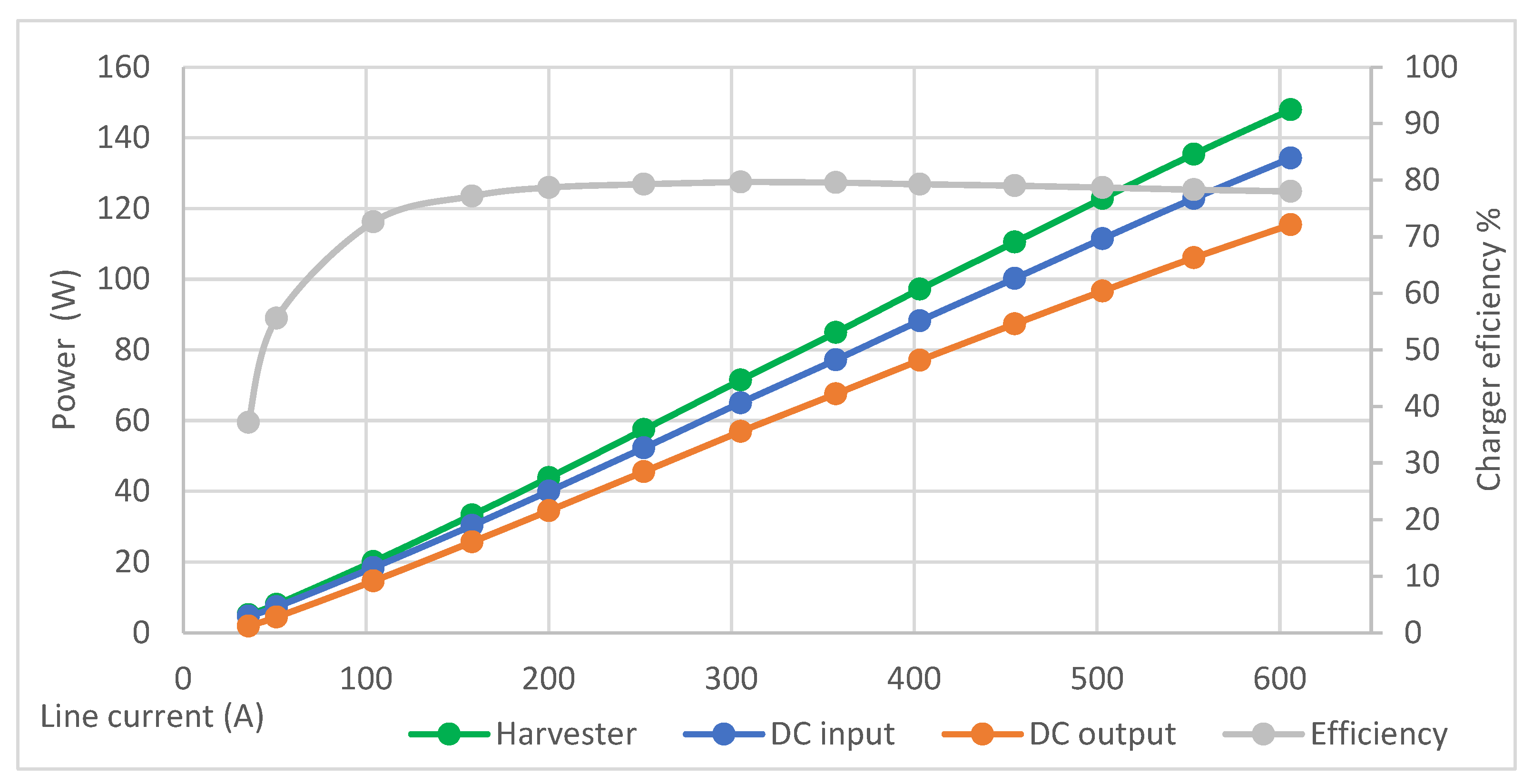
4.1. Energy Harvesting
4.2. Experimental Robotic Manipulation
5. Discussion
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Elbanhawi, M.; Mohamed, A.; Clothier, R.; Palmer, J.L.; Simic, M.; Watkins, S. Enabling technologies for autonomous MAV operations. Prog. Aerosp. Sci. 2017, 91, 27–52. [Google Scholar] [CrossRef]
- Hasan, A.; Kramar, V.; Hermansen, J.; Schultz, U.P. Development of Resilient Drones for Harsh Arctic Environment: Challenges, Opportunities, and Enabling Technologies. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 1227–1236. [Google Scholar]
- Bolognini, M.; Izzo, G.; Marchisotti, D.; Fagiano, L.; Limongelli, M.P.; Zappa, E. Vision-based modal analysis of built environment structures with multiple drones. Autom. Constr. 2022, 143, 104550. [Google Scholar] [CrossRef]
- Obayashi, S.; Kanekiyo, Y.; Uno, H.; Shijo, T.; Sugaki, K.; Kusada, H.; Nakakoji, H.; Hanamaki, Y.; Yokotsu, K. 400-W UAV/Drone inductive charging system prototyped for overhead power transmission line patrol. In Proceedings of the 2021 IEEE Wireless Power Transfer Conference (WPTC), San Diego, CA, USA, 1–4 June 2021; pp. 2021–2023. [Google Scholar]
- Xu, C.; Li, Q.; Zhou, Q.; Zhang, S.; Yu, D.; Ma, Y. Power Line-Guided Automatic Electric Transmission Line Inspection System. IEEE Trans. Instrum. Meas. 2022, 71, 1–18. [Google Scholar] [CrossRef]
- Skriver, M.; Stengaard, A.; Schultz, U.P.; Ebeid, E. Experimental Investigation of EMC Weaknesses in UAVs During Overhead Power Line Inspection. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 626–635. [Google Scholar]
- Dietsche, A.; Cioffi, G.; Hidalgo-Carrio, J.; Scaramuzza, D. Powerline Tracking with Event Cameras. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6990–6997. [Google Scholar]
- Kyriakakis, N.A.; Stamadianos, T.; Marinaki, M.; Marinakis, Y. The electric vehicle routing problem with drones: An energy minimization approach for aerial deliveries. Clean. Logist. Supply Chain 2022, 4, 100041. [Google Scholar] [CrossRef]
- Cosson, M.; David, B.; Arzel, L.; Poizot, P.; Rhallabi, A. Modelling of photovoltaic production and electrochemical storage in an autonomous solar drone. eScience 2022, 2, 235–241. [Google Scholar] [CrossRef]
- Gómez-Lagos, J.; Rojas-Espinoza, B.; Candia-Véjar, A. On a Pickup to Delivery Drone Routing Problem: Models and algorithms. Comput. Ind. Eng. 2022, 172, 108632. [Google Scholar] [CrossRef]
- Conte, C.; Rufino, G.; de Alteriis, G.; Bottino, V.; Accardo, D. A data-driven learning method for online prediction of drone battery discharge. Aerosp. Sci. Technol. 2022, 130, 107921. [Google Scholar] [CrossRef]
- Stewart, W.; Guarino, L.; Piskarev, Y.; Floreano, D. Passive Perching with Energy Storage for Winged Aerial Robots. Adv. Intell. Syst. 2021, 5, 2100150. [Google Scholar] [CrossRef]
- Bereg, S.; Díaz-Báñez, J.M.; Haghpanah, M.; Horn, P.; Lopez, M.A.; Marín, N.; Ramírez-Vigueras, A.; Rodríguez, F.; Solé-Pi, O.; Stevens, A.; et al. Optimal placement of base stations in border surveillance using limited capacity drones. Theor. Comput. Sci. 2022, 928, 183–196. [Google Scholar] [CrossRef]
- Momeni, M.; Soleimani, H.; Shahparvari, S.; Afshar-Nadjafi, B. Coordinated routing system for fire detection by patrolling trucks with drones. Int. J. Disaster Risk Reduct. 2022, 73, 102859. [Google Scholar] [CrossRef]
- ElSayed, M.; Foda, A.; Mohamed, M. Autonomous drone charging station planning through solar energy harnessing for zero-emission operations. Sustain. Cities Soc. 2022, 86, 104122. [Google Scholar] [CrossRef]
- Pinto, R.; Lagorio, A. Point-to-point drone-based delivery network design with intermediate charging stations. Transp. Res. Part C Emerg. Technol. 2022, 135, 103506. [Google Scholar] [CrossRef]
- Ahmadian, N.; Lim, G.J.; Torabbeigi, M.; Kim, S.J. Smart border patrol using drones and wireless charging system under budget limitation. Comput. Ind. Eng. 2022, 164, 107891. [Google Scholar] [CrossRef]
- Famili, A.; Stavrou, A. Eternal Flying: Optimal Placement of Wireless Chargers for Nonstop Drone Flights. In Proceedings of the 2022 International Conference on Electrical, Computer and Energy Technologies (ICECET), Prague, Czech Republic, 20–22 July 2022; pp. 1–6. [Google Scholar]
- Huang, H.; Savkin, A.V. Deployment of Charging Stations for Drone Delivery Assisted by Public Transportation Vehicles. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15043–15054. [Google Scholar] [CrossRef]
- Shin, M.; Kim, J.; Levorato, M. Auction-Based Charging Scheduling with Deep Learning Framework for Multi-Drone Networks. IEEE Trans. Veh. Technol. 2019, 68, 4235–4248. [Google Scholar] [CrossRef]
- Huang, H.; Savkin, A.V. A Method of Optimized Deployment of Charging Stations for Drone Delivery. IEEE Trans. Transp. Electrif. 2020, 6, 510–518. [Google Scholar] [CrossRef]
- Arafat, M.Y.; Moh, S. JRCS: Joint Routing and Charging Strategy for Logistics Drones. IEEE Internet Things J. 2022, 9, 21751–21764. [Google Scholar] [CrossRef]
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A Review on UAV Wireless Charging: Fundamentals, Applications, Charging Techniques and Standards. IEEE Access 2021, 9, 69235–69266. [Google Scholar]
- Lu, M.; Bagheri, M.; James, A.P.; Phung, T. Wireless Charging Techniques for UAVs: A Review, Reconceptualization, and Extension. IEEE Access 2018, 6, 29865–29884. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A Comprehensive Review of Micro UAV Charging Techniques. Micromachines 2022, 13, 977. [Google Scholar] [CrossRef] [PubMed]
- Mohamed, A.; Taylor, G.K.; Watkins, S.; Windsor, S.P. Opportunistic soaring by birds suggests new opportunities for atmospheric energy harvesting by flying robots. J. R. Soc. Interface 2022, 19, 20220671. [Google Scholar] [CrossRef]
- Kirubakaran, B.; Hosek, J. Extending UAV’s Operational Time through Laser Beam Charging: System Model Analysis. In Proceedings of the 2022 45th International Conference on Telecommunications and Signal Processing (TSP), Prague, Czech Republic, 13–15 July 2022; pp. 322–328. [Google Scholar]
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar]
- Mostafa, T.M.; Muharam, A.; Hattori, R. Wireless battery charging system for drones via capacitive power transfer. In Proceedings of the 2017 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Chongqing, China, 20–22 May 2017; pp. 1–6. [Google Scholar]
- Lan, L.; Polonelli, T.; Qin, Y.; Pucci, N.; Kwan, C.H.; Arteaga, J.M.; Boyle, D.; Yates, D.C.; Yeatman, E.M.; Mitcheson, P.D. An induction-based localisation technique for wirelessly charged drones. In Proceedings of the 2020 IEEE PELS Workshop on Emerging Technologies: Wireless Power Transfer (WoW), Seoul, Republic of Korea; pp. 275–277.
- Chittoor, P.K.; Bharatiraja, C. Solar Integrated Wireless Drone Charging System for Smart City Applications. In Proceedings of the 2021 IEEE 6th International Conference on Computing, Communication and Automation (ICCCA), Arad, Romania, 17–19 December 2021; pp. 407–412. [Google Scholar]
- Obayashi, S.; Kanekiyo, Y.; Shijo, T. UAV/Drone Fast Wireless Charging FRP Frustum Port for 85-kHz 50-V 10-A Inductive Power Transfer. In Proceedings of the 2020 IEEE Wireless Power Transfer Conference (WPTC), Seoul, Republic of Korea, 15–19 November 2020; pp. 219–222. [Google Scholar]
- Tian, X.; Chau, K.T.; Liu, W.; Lee, C.H.T. Analysis of Multi-Coil Omnidirectional Energy Harvester. IEEE Trans Magn. 2021, 57, 1–6. [Google Scholar] [CrossRef]
- Matsukura, M.; Moro, R.; Keicho, N.; Shimamura, K.; Yokota, S. Wireless Charging for Hovering-Drone via Millimeter Wave. In Proceedings of the 2022 Wireless Power Week (WPW), Bordeaux, France, 5–8 July 2022; pp. 772–775. [Google Scholar]
- Park, B.; Huh, S.; Kim, J.; Kim, H.; Shin, Y.; Woo, S.; Park, J.; Brito, A.; Kim, D.; Par, H.H.; et al. The Magnetic Energy Harvester with Improved Power Density Using Saturable Magnetizing Inductance Model for Maintenance Applications near High Voltage Power Line. IEEE Access 2021, 9, 82661–82674. [Google Scholar] [CrossRef]
- Paul, S.; Chang, J. Design of novel electromagnetic energy harvester to power a deicing robot and monitoring sensors for transmission lines. Energy Convers. Manag. 2019, 197, 111868. [Google Scholar] [CrossRef]
- Park, B.; Huh, S.; Kim, H.; Shin, Y.; Woo, S.; Ahn, S. Design and Analysis of Magnetic Energy Harvester with Improved Power Density for Drone Charging Station Near High Voltage Power Line. In Proceedings of the 2022 International Conference on Electronics, Information, and Communication (ICEIC), Jeju, Republic of Korea, 6–9 February 2022; pp. 2–3. [Google Scholar]
- Iversen, N.; Schofield, O.B.; Cousin, L.; Ayoub, N.; Vom Bogel, G.; Ebeid, E. Design, Integration and Implementation of an Intelligent and Self-recharging Drone System for Autonomous Power line Inspection. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 4168–4175. [Google Scholar]
- Stuhne, D.; Hoang, V.D.; Vasiljevic, G.; Bogdan, S.; Kovacic, Z.; Ollero, A.; Ebeid, E.S.M. Design of a Wireless Drone Recharging Station and a Special Robot End Effector for Installation on a Power Line. IEEE Access 2022, 10, 88719–88737. [Google Scholar] [CrossRef]
- Bogel GVom Cousin, L.; Iversen, N.; Ebeid, E.S.M.; Hennig, A. Drones for Inspection of Overhead Power Lines with Recharge Function. In Proceedings of the 2020 23rd Euromicro Conference on Digital System Design (DSD), Kranj, Slovenia, 26–28 August 2020; pp. 497–502. [Google Scholar]
- Stewart, W.; Floreano, D.; Ebeid, E. A Lightweight Device for Energy Harvesting from Power Lines with a Fixed-Wing UAV. In Proceedings of the 2022 International Conference on Unmanned Aircraft Systems (ICUAS), Dubrovnik, Croatia, 21–24 June 2022; pp. 86–93. [Google Scholar]
- Iversen, N.; Kramberger, A.; Schofield, O.B.; Ebeid, E. Novel Power Line Grasping Mechanism with Integrated Energy Harvester for UAV applications. In Proceedings of the 2021 IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), New York, NY, USA, 25–27 October 2021; pp. 34–39. [Google Scholar]
- Aerial-Core H2020-ICT-2018-20. Aerial-Core Website. Available online: https://aerial-core.eu/ (accessed on 1 September 2023).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Overhead Power Line | Value | Unit |
|---|---|---|
| Power line voltage 1 | <400 | kV |
| Frequency | 50/60 2 | Hz |
| Power line diameter | 9–24 | mm |
| Current | <600 | A |
| Aircraft | Value | Unit |
|---|---|---|
| Weight | ≈15 | kg |
| Payload | <10 | kg |
| Flight time (payload-dependent) | 10–50 | min |
| Battery capacity | 250–1000 | Wh |
| Power Line | Value | Unit |
|---|---|---|
| Current | 0–600 | A |
| Frequency | 50 | Hz |
| Core | Value | Unit |
| Weight | 1089 | g |
| Material | Grain-oriented silicon steel | |
| Width | 40 | mm |
| Height | 45 | mm |
| Length | 60 | mm |
| Thickness | 12 | mm |
| Coil | Value | Unit |
| Turns | 60 | |
| Material | Copper | |
| MPPT Converter | Value | Unit |
| Input voltage | 16–35 | V |
| Output voltage | 20–30 | V |
| Nominal current | 12 | A |
| Battery Pack | Value | Unit |
| Voltage | 24 | V |
| Capacity | 40 | Ah |
| Chemicals | Pb–acid |
| Line current (A) | 35.6 | 51 | 104 | 158 | 200 | 252 | 305 | 357 | 403 | 455 | 503 | 553 | 606 | |
| Harvester secondary winding | V | 15.45 | 15.91 | 17.36 | 17.73 | 17.93 | 18.2 | 18.43 | 18.65 | 18.86 | 19.08 | 19.26 | 19.48 | 19.65 |
| I | 0.332 | 0.505 | 1.161 | 1.878 | 2.448 | 3.158 | 3.877 | 4.554 | 5.153 | 5.792 | 6.378 | 6.95 | 7.53 | |
| P | 5.1 | 8.0 | 20.2 | 33.3 | 43.9 | 57.5 | 71.5 | 84.9 | 97.2 | 110.5 | 122.8 | 135.4 | 148.0 | |
| DC input | V | 14.11 | 14.52 | 15.88 | 16.17 | 16.36 | 16.57 | 16.78 | 16.96 | 17.13 | 17.31 | 17.48 | 17.68 | 17.83 |
| I | 0.332 | 0.505 | 1.161 | 1.878 | 2.448 | 3.158 | 3.877 | 4.554 | 5.153 | 5.792 | 6.378 | 6.95 | 7.53 | |
| P | 4.7 | 7.3 | 18.4 | 30.4 | 40.0 | 52.3 | 65.1 | 77.2 | 88.3 | 100.3 | 111.5 | 122.9 | 134.3 | |
| DC output | V | 24.15 | 24.16 | 24.2 | 24.25 | 24.3 | 24.35 | 24.43 | 24.49 | 24.54 | 24.62 | 24.67 | 24.76 | 24.81 |
| I | 0.079 | 0.185 | 0.605 | 1.06 | 1.422 | 1.872 | 2.33 | 2.76 | 3.141 | 3.548 | 3.919 | 4.284 | 4.654 | |
| P | 1.9 | 4.5 | 14.6 | 25.7 | 34.6 | 45.6 | 56.9 | 67.6 | 77.1 | 87.4 | 96.7 | 106.1 | 115.5 | |
| Efficiency | 37.2 | 55.6 | 72.6 | 77.2 | 78.7 | 79.3 | 79.7 | 79.6 | 79.3 | 79.0 | 78.7 | 78.3 | 78.0 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Muñoz-Gómez, A.-M.; Marredo-Píriz, J.-M.; Ballestín-Fuertes, J.; Sanz-Osorio, J.-F. A Novel Charging Station on Overhead Power Lines for Autonomous Unmanned Drones. Appl. Sci. 2023, 13, 10175. https://doi.org/10.3390/app131810175
Muñoz-Gómez A-M, Marredo-Píriz J-M, Ballestín-Fuertes J, Sanz-Osorio J-F. A Novel Charging Station on Overhead Power Lines for Autonomous Unmanned Drones. Applied Sciences. 2023; 13(18):10175. https://doi.org/10.3390/app131810175
Chicago/Turabian StyleMuñoz-Gómez, Antonio-Miguel, Juan-Manuel Marredo-Píriz, Javier Ballestín-Fuertes, and José-Francisco Sanz-Osorio. 2023. "A Novel Charging Station on Overhead Power Lines for Autonomous Unmanned Drones" Applied Sciences 13, no. 18: 10175. https://doi.org/10.3390/app131810175
APA StyleMuñoz-Gómez, A.-M., Marredo-Píriz, J.-M., Ballestín-Fuertes, J., & Sanz-Osorio, J.-F. (2023). A Novel Charging Station on Overhead Power Lines for Autonomous Unmanned Drones. Applied Sciences, 13(18), 10175. https://doi.org/10.3390/app131810175