
Research on the Reconfiguration Method of Space-Based Exploration Satellite Constellations for Moving Target Tracking at Sea

Abstract
:1. Introduction
2. Manoeuvre Prediction Model for Moving Targets at Sea
2.1. Basis for Model Selection
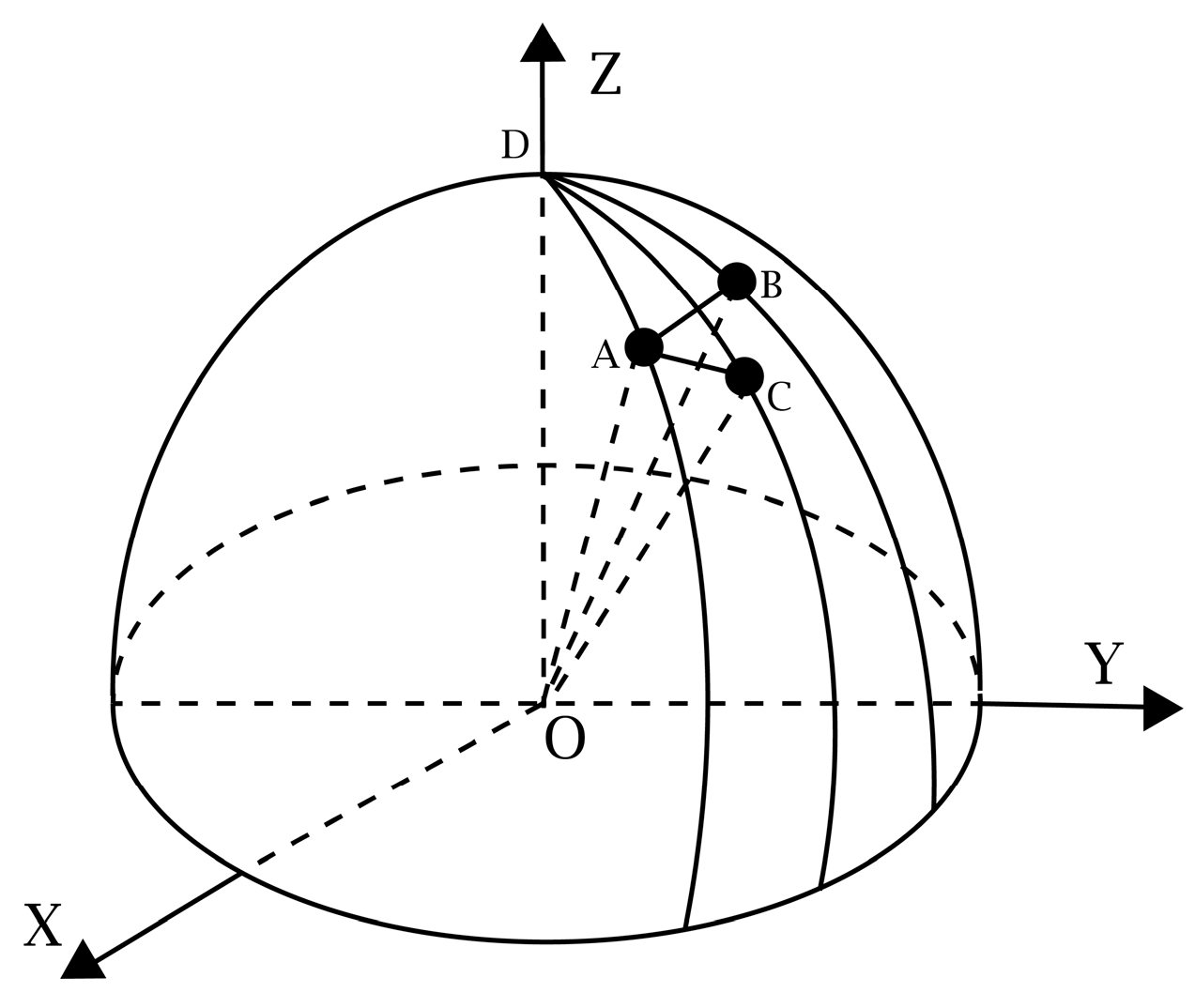
2.2. Manoeuvring Prediction Model of Moving Target in Three-Dimensional Space Coordinate System
2.3. Manoeuvring Prediction Model of Moving Target in Two-Dimensional Space Coordinate System
3. Modelling of Three-Phase Orbital Manoeuvring Method
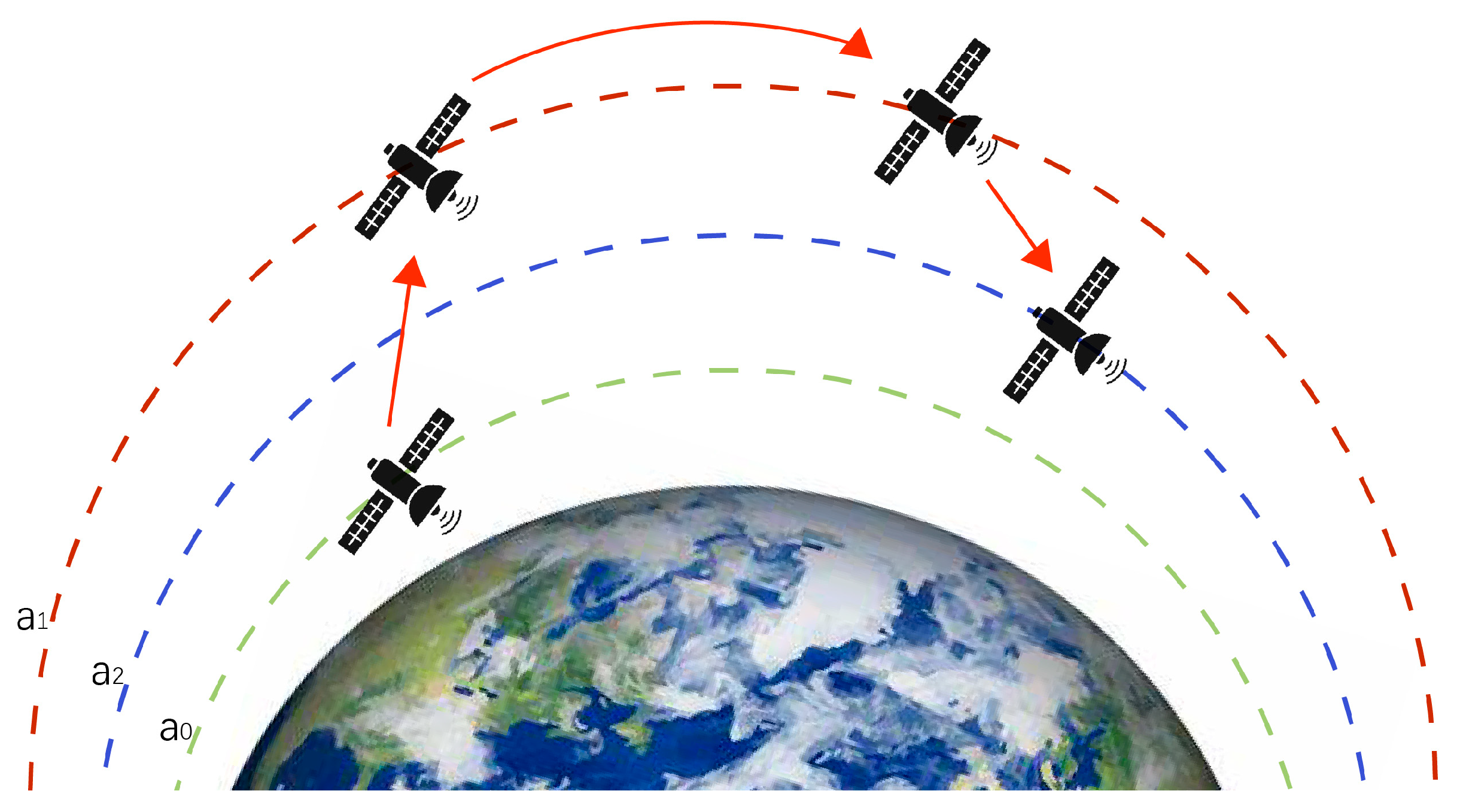
3.1. Initial Orbital Model
3.2. Three-Phase Orbital Manoeuvring Model
- Phase 1: the satellite maintains a constant acceleration using constant low thrust, causing the satellite orbit to increase or decrease in altitude relative to the initial orbit to a transfer orbit.
- Phase 2: satellites maintain a constant altitude in transfer orbit by counteracting the effects of atmospheric drag with thrust.
- Phase 3: the satellite is moved to the desired final altitude by using the same constant low thrust as in the first phase to give the satellite constant acceleration.
3.3. Orbital Manoeuvre Parsing
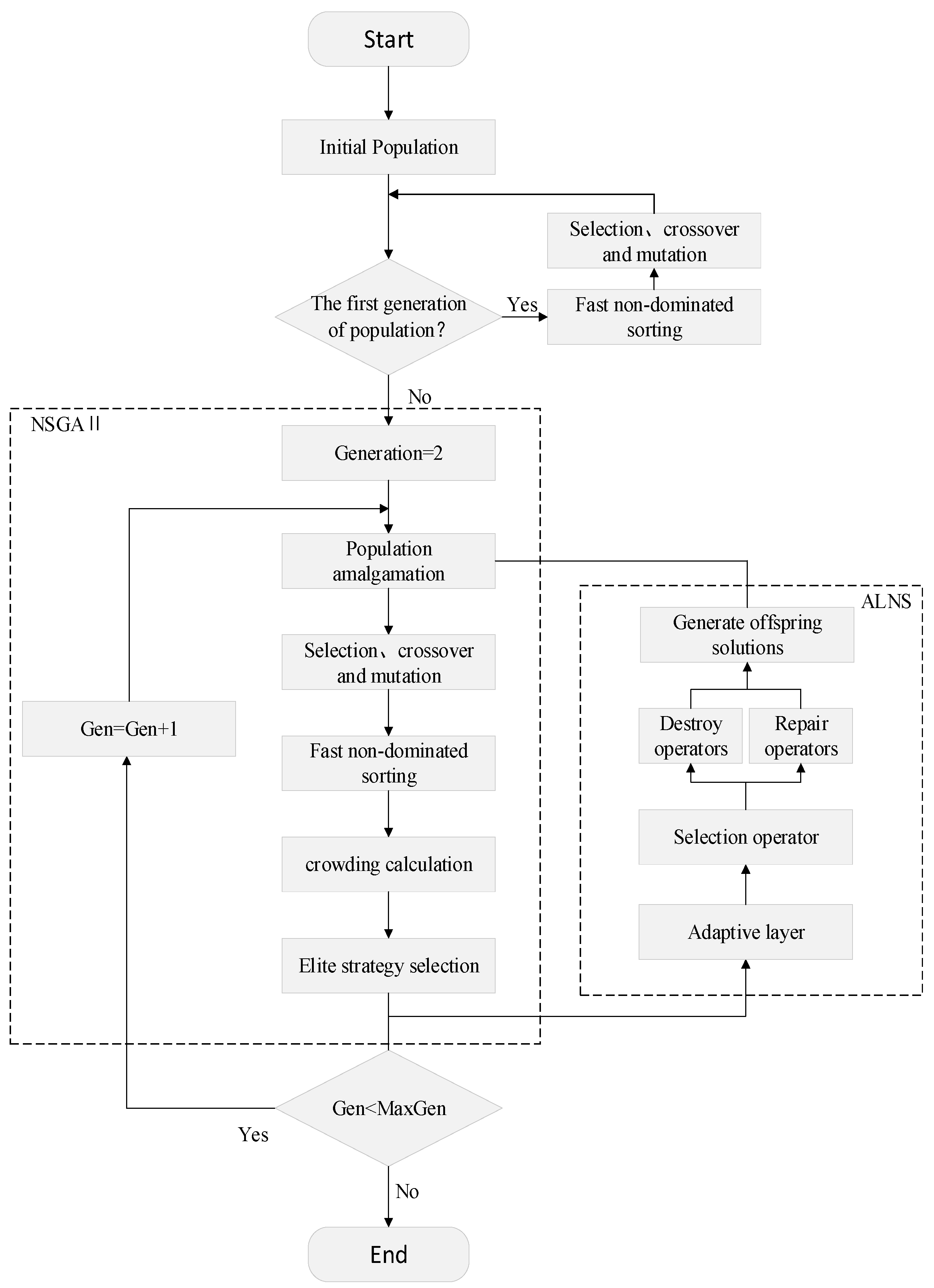
4. Non-Dominant Sorting Adaptive Memetic Algorithm (NSAM)
4.1. Basic Structure of the NSAM
| Algorithm 1 NSAM algorithm | |
| Input: target trajectory, satellite parameters, initial population size (IPS), offspring population size (OPS), and maximum iterations (MaxIter) Output: elitist solutions (ES) | |
| 1 | Repeat: generate initial solution |
| 2 | According to the input elements to generate initial solutions |
| 3 | End: until parent population size = IPS + OPS |
| 4 | The solutions were optimized by selection, crossover, and mutation in |
| 5 | Select and update elite solutions with elite strategies in |
| 6 | ALNS: improve the solutions |
| 7 | Select destroy operators and repair operators according to the adaptive layer |
| 8 | Based on the current elitist solutions, use operators to update populations |
| 9 | Combine the offspring solutions and the current elitist solutions |
| 10 | Update the elite solutions and update the scores and weights of operators in the adaptive layer |
| 11 | End until iteration achieves MaxIter |
| 12 | Output |
4.2. Design of Destroy Operator and Repair Operator
4.2.1. Destroy Operators
4.2.2. Repair Operators
4.3. Adaptive Strategy Design and Termination Criterion Design
5. Simulation Experiments
5.1. Parameter Setting
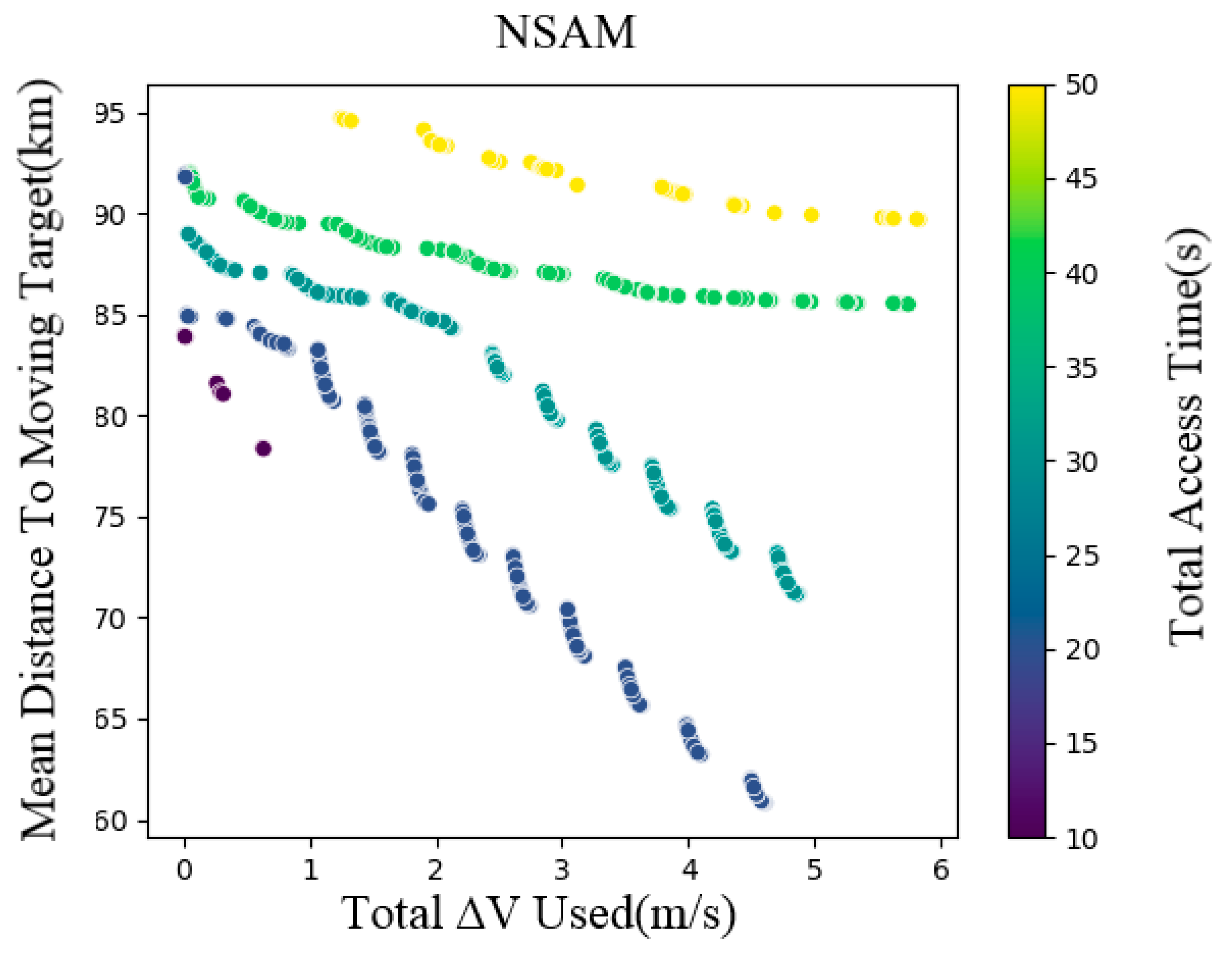
5.2. Reconfiguration Analysis
5.2.1. Analysis of the Results
5.2.2. Experimental Platform Results Diagram
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhu, D.; Zhang, Z.; Zhao, C. A satellite configuration design to achieve optical stealth. Space Control Technol. Appl. 2017, 43, 61–66. [Google Scholar]
- Berry, P.E.; Fogg, D.A.B.; Pontecorvo, C. Optimal Search, Location and Tracking of Surface Maritime Targets by a Constellation of Surveillance Satellites; DSTO Information Sciences Laboratory: Canberra, Australia, 2003. [Google Scholar]
- Yifan, X. Joint Scheduling for Space-Based Maritime Moving Targets Surveillance; National University of Defense Technology: Changsha, China, 2011; pp. 40–63, 74–125, 142–145. [Google Scholar]
- Liu, Y.; Yao, L.; Xiong, W. GF-4 satellite and automatic identification system data fusion for ship tracking. IEEE Geosci. Remote Sens. Lett. 2018, 16, 281–285. [Google Scholar] [CrossRef]
- Larson, K.M.; Lyndsay, S.; Andrea, S.; Skyler, G.; Erika, L.R.; Don, L. An efficient approach for tracking the aerosol-cloud interactions formed by ship emissions using GOES-R satellite imagery and AIS ship tracking information. arXiv 2021, arXiv:2108.05882. [Google Scholar]
- Li, J.; Yao, F.; Xu, Y. Using Multiple Satellites to Search for Maritime Moving Targets Based on Reinforcement Learning. J. Donghua Univ. Engl. 2016, 33, 749–754. [Google Scholar]
- Lixia, H.; Xin, P.; Shuhao, L.; Hua, Z. Design and simulation of moving target tracking strategy for high-orbit optical imaging satellite. Spacecr. Eng. 2018, 27, 10–16. [Google Scholar]
- Ci, Y. Multi-Satellite Mission Planning for Moving Target Search; National University of Defense Technology: Changsha, China, 2008; pp. 88–115. [Google Scholar]
- Chengliang, Z.; Zhanyue, Z.; Zhiliang, L.; Yao, L. Satellite Reconstruction Network Optimization and Simulation for Marine Maneuvering Target Tracking and Surveillance. Aerosp. Control Appl. 2018, 44, 1–7. [Google Scholar]
- Morgan, S.J.; McGrath, C.; De, W.O.L. Mobile target tracking using a reconfigurable low earth orbit constellation. ASCEND 2020, 2020, 42–47. [Google Scholar]
- Paek, S.W.; Kim, S.; De, W.O. Optimization of reconfigurable satellite constellations using simulated annealing and genetic algorithm. Sensors 2019, 19, 765. [Google Scholar] [CrossRef] [PubMed]
- Mirjalili, S. Genetic algorithm. In Evolutionary Algorithms and Neural Networks: Theory and Applications; Springer: Berlin/Heidelberg, Germany, 2019; pp. 43–55. [Google Scholar]
- Lee, H.W.; Ho, K. Binary integer linear programming formulation for optimal satellite constellation reconfiguration. In Proceedings of the AAS/AIAA Astrodynamics Specialist Conference, South Lake Tahoe, CA, USA, 9–13 August 2020; Volume 8. [Google Scholar]
- He, X.; Li, H.; Yang, L.; Zhao, J. Reconfigurable satellite constellation design for disaster monitoring using physical programming. Int. J. Aerosp. Eng. 2020, 2020, 8813685. [Google Scholar] [CrossRef]
- Liu, W.; Hu, K.; Li, Y. A review of prediction methods for moving target trajectories. Chin. J. Intell. Sci. Technol. 2021, 3, 149–160. [Google Scholar]
- Huang, S.; Colombo, C.; Alessi, E.M. Low-thrust de-orbiting from Low Earth Orbit through natural perturbations. Acta Astron. 2022, 195, 145–162. [Google Scholar] [CrossRef]
- Di, P.G.; Sanjurjo, R.M.; Pérez, G.D. Optimal Low-Thrust Orbital Plane Spacing Maneuver for Constellation Deployment and Reconfiguration including J2. In Proceedings of the AIAA SciTech 2022 Forum, San Diego, CA, USA, 3–7 January 2022; p. 1478. [Google Scholar]
- Kozai, Y. The motion of a close earth satellite. Astron. J. 1959, 64, 367. [Google Scholar] [CrossRef]
- Brouwer, D. Solution of the problem of artificial satellite theory without drag. Astron. J. 1959, 64, 378. [Google Scholar] [CrossRef]
- Curtis, H.D. Orbital Mechanics for Engineering Students[M]; Butterworth-Heinemann: Oxford, UK, 2013. [Google Scholar]
- Casanovas, G.F. The Reality of Space Exploration: A Complete Integral Approach of Space Mission Design; Universitat Politècnica de Catalunya: Barcelona, Spain, 2023. [Google Scholar]
- Zhao, Z.; Zhang, J.; Li, H.; Zhou, J. LEO cooperative multi-spacecraft refueling mission optimization considering J2 perturbation and target’s surplus propellant constraint. Adv. Space Res. 2017, 59, 252–262. [Google Scholar] [CrossRef]
- Bakhtiari, M.; Abbasali, E.; Daneshjoo, K. Minimum Cost Perturbed Multi-impulsive Maneuver Methodology to Accomplish an Optimal Deployment Scheduling for a Satellite Constellation. J. Astronaut. Sci. 2023, 70, 18. [Google Scholar] [CrossRef]
- Changxuan, W.; Chen, Z.; Yu, C.; Dong, Q. Low-thrust transfer between circular orbits using natural precession and yaw switch steering. J. Guid. Control Dyn. 2021, 44, 1371–1378. [Google Scholar]
- Vallado, D.A. Fundamentals of Astrodynamics and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Macdonald, M.; Viorel, B. The International Handbook of Space Technology; Springer: Berlin/Heidelberg, Germany, 2014; Volume 3, pp. 154–196. [Google Scholar]
- Neri, F.; Cotta, C. Memetic algorithms and memetic computing optimization: A literature review. Swarm Evol. Comput. 2012, 2, 1–14. [Google Scholar] [CrossRef]
- Srinivas, N.; Deb, K. Muiltiobjective optimization using nondominated sorting in genetic algorithms. Evol. Comput. 1994, 2, 221–248. [Google Scholar] [CrossRef]
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A fast and elitist multiobjective genetic algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef]
- Pisinger, D.; Ropke, S. A general heuristic for vehicle routing problems. Comput. Oper. Res. 2007, 34, 2403–2435. [Google Scholar] [CrossRef]
- McGrath, C.N.; Clark, R.A.; Werkmeister, A.; Macdonald, M. Small satellite operations planning for agile disaster response using graph theoretical techniques. In Proceedings of the 70th International Astronautical Congress, Washington, DC, USA, 21–25 October 2019; pp. 21–25. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Unit |
|---|---|---|
| Altitude | 703 | km |
| Inclination | 40 | deg |
| Right ascension of the ascending node at epoch | 0 | deg |
| Argument of latitude at epoch | 0 | deg |
| Date | Time | Latitude | Longitude |
|---|---|---|---|
| 27 October 2022 | 00.00 | 11.7 | 132.0 |
| 27 October 2022 | 12.00 | 11.3 | 131.1 |
| 28 October 2022 | 00.00 | 11.4 | 129.9 |
| 28 October 2022 | 12.00 | 12.1 | 127.2 |
| 29 October 2022 | 00.00 | 13.8 | 124.1 |
| 29 October 2022 | 12.00 | 13.7 | 121.7 |
| 30 October 2022 | 00.00 | 15.4 | 119.9 |
| 30 October 2022 | 12.00 | 16.1 | 118.3 |
| 31 October 2022 | 00.00 | 15.8 | 117.2 |
| 31 October 2022 | 12.00 | 16.8 | 117.0 |
| 1 November 2022 | 00.00 | 18.4 | 116.2 |
| 1 November 2022 | 12.00 | 19.1 | 115.9 |
| 2 November 2022 | 00.00 | 20.4 | 116.0 |
| 2 November 2022 | 12.00 | 21.0 | 115.1 |
| 3 November 2022 | 00.00 | 21.8 | 114.2 |
| Parameter | Value | Unit |
|---|---|---|
| Mass | 4 | kg |
| Thrust | 0.35 | mN |
| The field of view of the satellite diameter | 200 | km |
| Parameter | Value | Unit |
|---|---|---|
| Mean Earth radius | km | |
| Earth rotation rate | rad/s | |
| Coefficient of the Earth’s gravitational zonal harmonic of the second degree | 0.00108270 | - |
| Earth’s standard gravitational parameter | ||
| Flattening factor of Earth | - |
| Parameter | Meaning | Value |
|---|---|---|
| IPS | Initial population size | 1150 |
| OPS | Offspring population size | 800 |
| MaxIter | Maximum iterations | 300 |
| The score of the new solution is better than all the other solutions | 3 | |
| The score of the new solution is better than one of the current dominant solutions | 2 | |
| The score of the new solution is dominated by the current solution, but accepted under certain criteria | 1 | |
| The score of the new solution is inferior and does not satisfy the acceptance criteria | 0.5 |
| (a) | ||||
|---|---|---|---|---|
| Target Number | Non-Manoeuvring | |||
| Delta-V (m/s) | Mean Distance (km) | Total Access Time (s) | Target in View | |
| 1 | - | 85 | 30 | Yes |
| 2 | - | - | - | No |
| 3 | - | 86 | 10 | Yes |
| 4 | - | 59 | 40 | Yes |
| 5 | - | 76 | 50 | Yes |
| Summary | 0 m/s | 76.5 | 130 | - |
| (b) | ||||
| Target Number | Manoeuvring | |||
| Delta-V (m/s) | Mean Distance (km) | Total Access Time (s) | Target in View | |
| 1 | 2.06 | 90 | 50 | Yes |
| 2 | 0.24 | 91 | 30 | Yes |
| 3 | 4.968 | 84 | 30 | Yes |
| 4 | 4.172 | 59 | 60 | Yes |
| 5 | 0.466 | 71 | 60 | Yes |
| Summary | 11.91 m/s | 79 | 230 | - |
| Track Name | Altitude (km) | Inclination (deg) | Right Ascension of the Ascending Node at Epoch (deg) | Argument of Latitude at Epoch (deg) |
|---|---|---|---|---|
| Initial orbit | 703 | 40 | 0 | 0 |
| Transfer orbit | 720 | 40 | 0 | 0 |
| Final orbit | 715 | 40 | 0 | 0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Luo, J.; Gu, X.; Zhang, W. Research on the Reconfiguration Method of Space-Based Exploration Satellite Constellations for Moving Target Tracking at Sea. Appl. Sci. 2023, 13, 10103. https://doi.org/10.3390/app131810103
Wang Y, Luo J, Gu X, Zhang W. Research on the Reconfiguration Method of Space-Based Exploration Satellite Constellations for Moving Target Tracking at Sea. Applied Sciences. 2023; 13(18):10103. https://doi.org/10.3390/app131810103
Chicago/Turabian StyleWang, Yao, Junren Luo, Xueqiang Gu, and Wanpeng Zhang. 2023. "Research on the Reconfiguration Method of Space-Based Exploration Satellite Constellations for Moving Target Tracking at Sea" Applied Sciences 13, no. 18: 10103. https://doi.org/10.3390/app131810103
APA StyleWang, Y., Luo, J., Gu, X., & Zhang, W. (2023). Research on the Reconfiguration Method of Space-Based Exploration Satellite Constellations for Moving Target Tracking at Sea. Applied Sciences, 13(18), 10103. https://doi.org/10.3390/app131810103