2.4.1. Mathematical Model for Pile Length Optimization
Based on the previous discussion on the design calculation method of micropiles, it is evident that precise design calculations for the cross-section of micropiles can be achieved by employing thrust sharing theory and elastic foundation beam theory. However, when determining the length of micropiles, only anchorage requirements have been taken into account. Experimental results indicate that the anchoring characteristics of micropiles gradually manifest as they approach failure. Therefore, the length of micropiles determined solely based on anchorage requirements obviously has great potential for optimization. Thus, it is necessary to conduct optimization design research on the length of micropiles to improve the design theory and method of micropiles.
The pile length optimization design proposed in this study is a type of structural optimization design. Generally speaking, structural optimization is the process of solving the variables to be optimized under given design parameters, satisfying the constraints, and obtaining the optimal solution of the objective function. Its mathematical model includes the following aspects:
In the optimization process, it is often necessary to first specify the design values of some parameters and then adjust the values of other design parameters to achieve the optimization goal. These adjustable design parameters are called design variables. For the micropile length optimization carried out in this study, the design variable is set as the length of the micropiles, denoted as PL. Then we have:
Where denotes the length of the first row of micropiles along the direction of landslide movement, denotes the length of the second row of micropiles, and so on up to the nth row of micropiles.
- (2)
Objective Function
The objective function, sometimes called the performance function, is an index used to measure the goodness of the design solution. In this study, the optimization objective function is PLmax − PLmin ≤ ε to screen out the optimal length of pile length, which represents the cost of construction. Optimization means selecting the best pile length that meets the conditions by algorithm under the premise of satisfying the safety factor so as to reduce the cost of the project.
The mathematical relationship between the objective function and the design variables is calculated using a reasonable geotechnical constitutive model and the finite difference method, which will be described in detail later in the study.
- (3)
Constraints
Constraints are necessary conditions for obtaining a convergent solution in optimization design. The pile length optimization carried out in this study needs to satisfy the following two constraints:
- ①
The constitutive equation, boundary conditions, and initial conditions are required for the finite difference solution of the micropile treatment landslide model.
- ②
The range constraint of the design variable, which is the length of the micropile, needs to be satisfied.
The value of the design variable should meet the condition: . In which represent the upper and lower bounds of the design variable pile length, respectively. Calculations will be performed by the design method of minipiles.
- ③
The constraint function is determined as the stability safety coefficient of the slope after the micropile treatment, denoted as Fos. Different from the conventional optimization design method, using the safety coefficient as the index for evaluating the design scheme is not to obtain the maximum value of it as the design objective but to set a specification-allowed safety coefficient [Fs] index as the lower limit of the constraint objective function. That is, the reasonable solution must be satisfied for pile length optimization (The factor of safety is obtained by strength discounting method in numerical simulation.):
2.4.2. Optimize Process Analysis
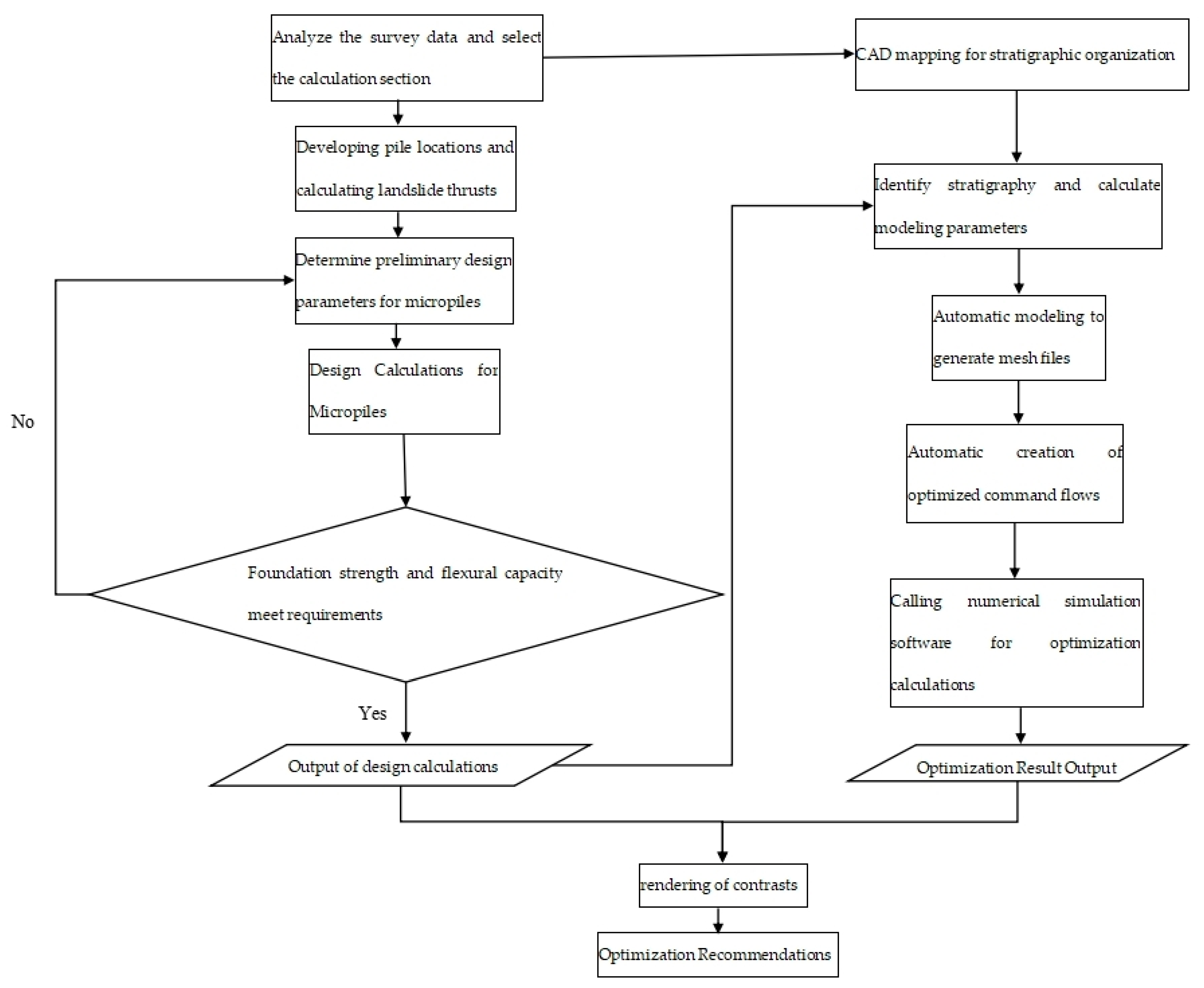
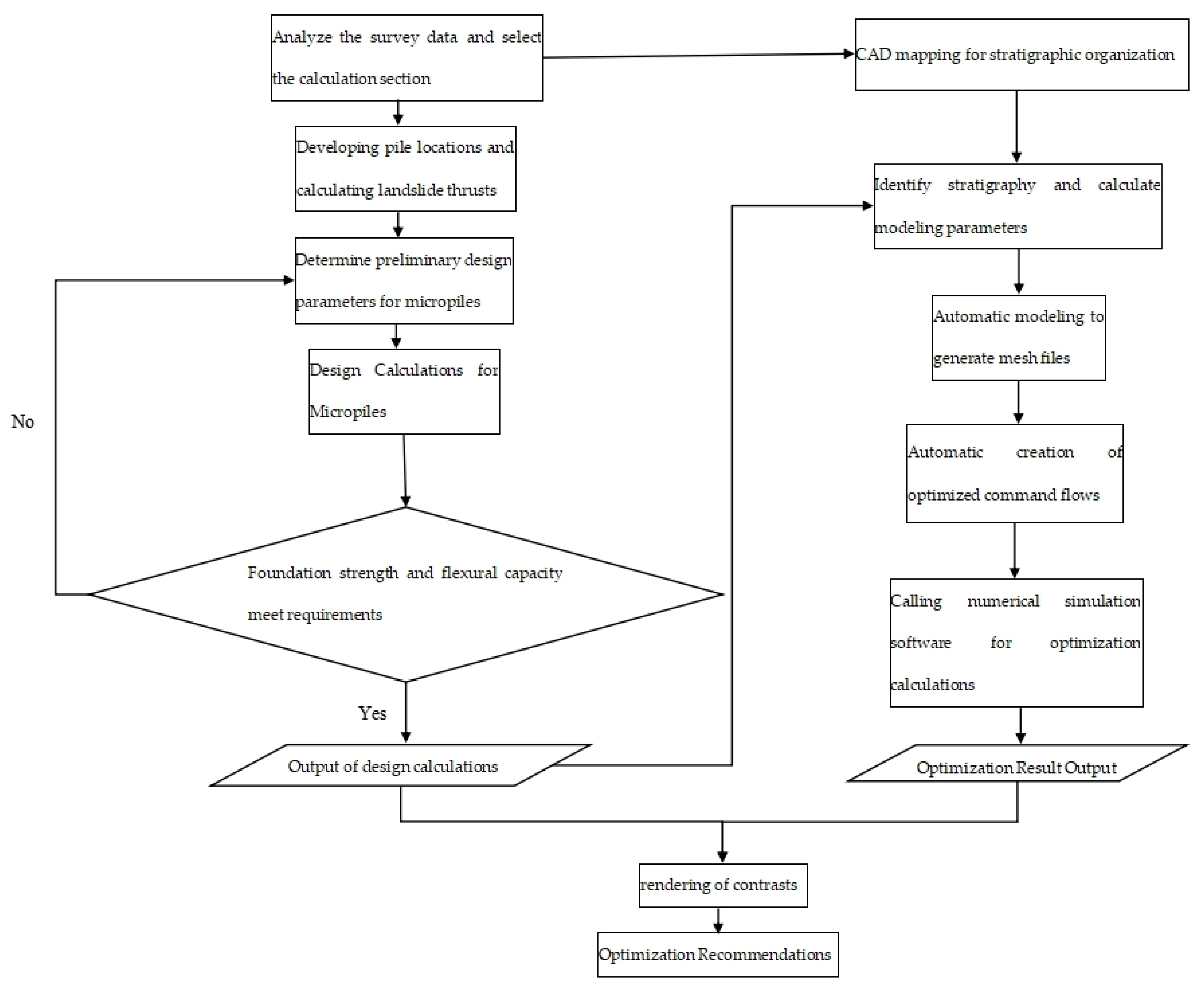
The optimization problem in this study is to determine the safest pile length using our optimized mathematical model. The optimization process will include two main modules: theoretical calculations and numerical calculations. The specific implementation steps are as follows:
Step 1: Analyze the landslide survey data, determine the calculation section of the landslide, and complete the related profile CAD drawings. Step 2: Determine the pile layout and calculate the landslide thrust. Step 3: Prepare the preliminary design parameters of the pile, such as pile diameter, spacing, length, material, foundation coefficient, stratum parameters, and calculation mode. Step 4: Calculate pile displacement, internal force, earth pressure, and pile length according to the calculation method described in
Section 1. Step 5: Verify the foundation strength and micropile flexural bearing capacity. If satisfied, continue with Step 6. If not, return to Step 3. Step 6: Draw the internal force distribution and displacement maps of the pile and provide reinforcement suggestions. Step 7: Based on the CAD drawings obtained in Step 1, organize the stratum lines and save them as a CAD exchange file format “.dxf”. Step 8: Read and identify the stratum line exchange file, calculate the model’s size parameters, and determine the modeling parameters and boundary parameters based on the calculation results. Step 9: Automatically create and mesh the numerical simulation grid and output the grid file. Step 10: Automatically create the numerical simulation command flow file for optimization calculations. Step 11: Call numerical simulation software for numerical optimization calculations and iterate for different pile lengths. Step 12: Read and analyze the optimization calculation results and provide optimization suggestions. The optimization flow chart is shown in
Figure 4.
In particular, the optimization command flow file created in Step 10 includes the core algorithm of the entire optimization process, including the following procedural steps:
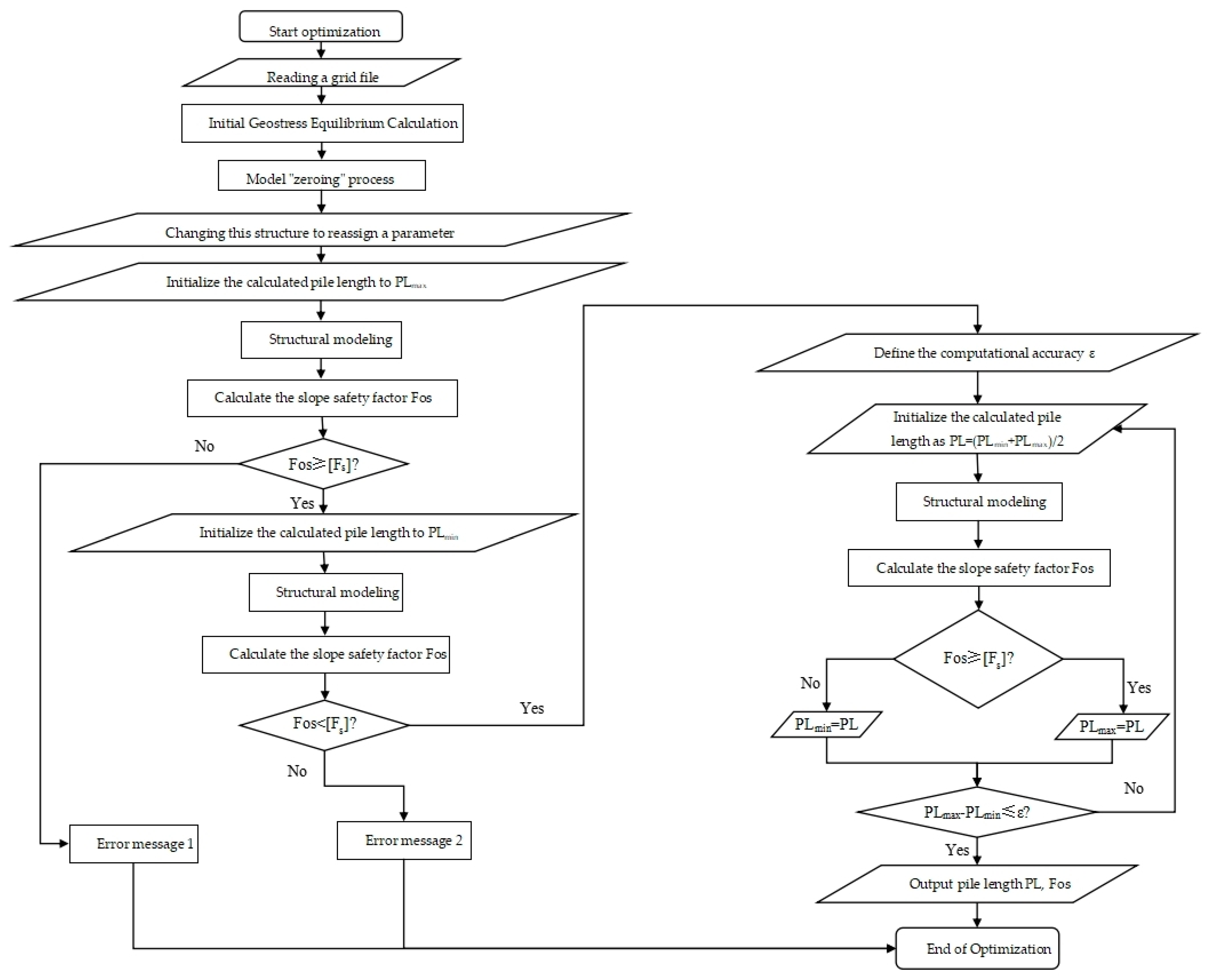
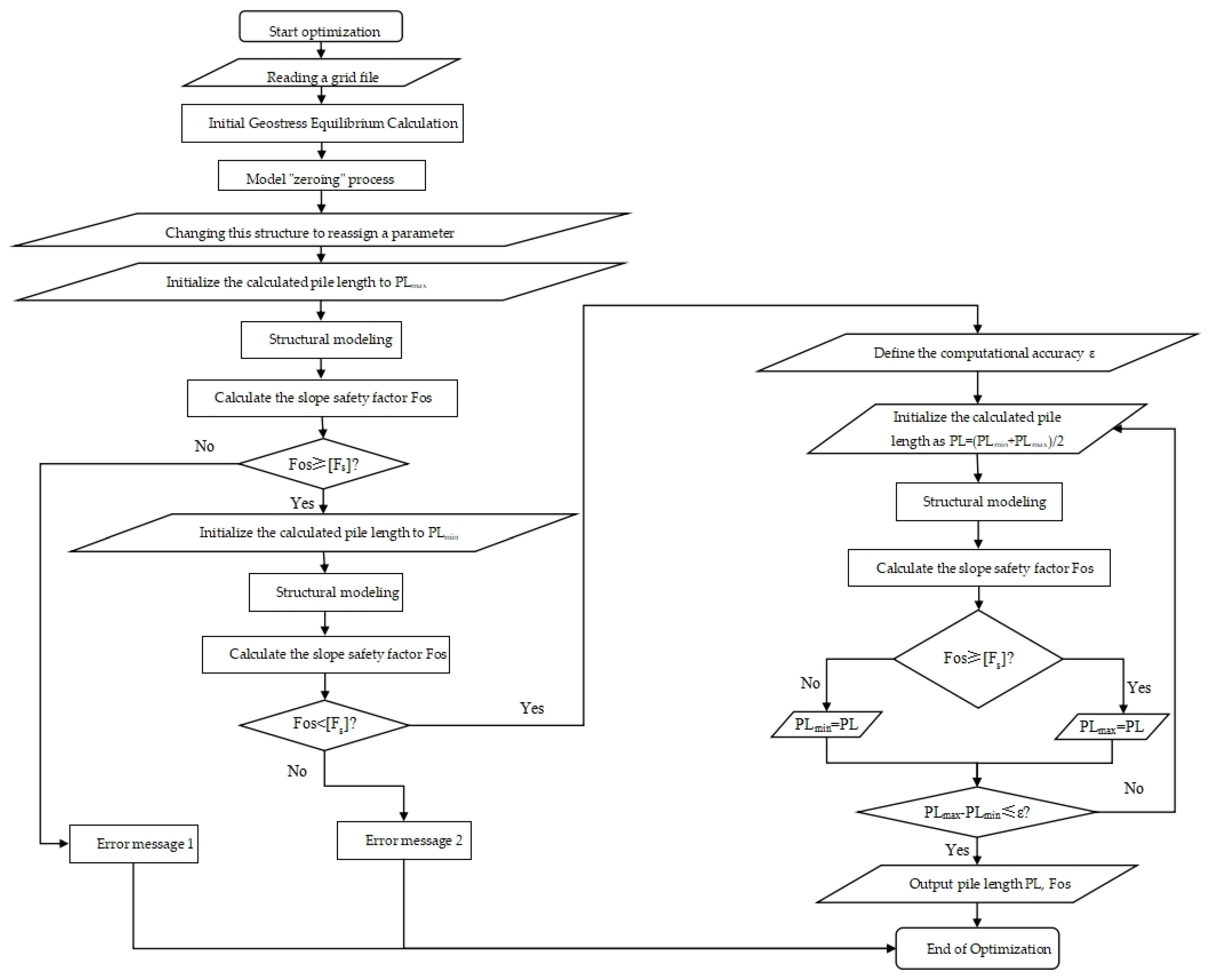
S1: Read the model grid file output by Step 9. S2: Perform initial stress equilibrium calculations: define the constitutive model as an elastic model; assign calculation parameters to all strata; create a contact surface between the sliding body and the sliding bed and assign parameters to the contact surface; further set boundary conditions and apply gravity, and calculate until convergence is reached. S3: “Zeroing” the model after initial stress calculations (eliminating displacement and plastic zones). S4: Change the soil constitutive model to the Mohr–Coulomb model and assign calculation parameters. S5: Structured modeling of micropiles and connecting beams (or plates) at the pile locations and assign structural calculation parameters. The pile length used in this modeling is the calculated pile length in Step 4, which is the upper limit of the design variable PL
max. S6: Set boundary conditions and calculate the slope safety factor after micropile reinforcement under self-weight working conditions. If the safety factor is not less than the allowable safety factor [Fs], proceed to the next step. Otherwise, it prompts an error message stating that the pile length design is deemed unreasonable or the simulation parameters are not set reasonably. Please review and attempt again. The flowchart of the optimization algorithm for micropile length is shown in
Figure 5.
(Note: the reason for triggering Error Prompt 1 is that when using the design calculated pile length PLmax for modeling and calculating, the safety factor is too low, indicating that the design pile length is too small to guarantee the landslide control effect, or there are problems with the numerical simulation of the strata parameters, resulting in unsafe numerical simulation calculation.)
S7: Reset the pile length to the lower limit PLmin. PLmin is taken as the construction length if there are no special requirements, i.e., PLmin is the sum of the bearing segment pile length and the embedded segment pile length. The embedded segment pile length is generally taken as one third of the full pile length and not less than 4 m in construction design. After determining PLmin, rebuild the structure model, assign parameters, and calculate the safety factor. If the safety factor is still less than the allowable safety factor [Fs], proceed to the next step. Otherwise, it gives an Error Prompt 2: The minimum pile length already meets safety requirements, and no optimization is needed. Please check if the input parameters are reasonable.
(Note: Error Prompt 2 is triggered when the safety factor meets the requirements after modeling and calculating with the design calculated pile length PLmin, indicating that the minimum pile length already meets the safety requirements and there is no room for pile length optimization. However, it is also possible that there are problems with the numerical simulation of the strata parameters, leading to a risky numerical simulation calculation.)
S8: Set the optimization calculation accuracy ε. S9: Set the pile length PL = (PLmax + PLmin)/2, rebuild the structure model again, and calculate the safety factor. If the safety factor is less than the allowable safety factor, then set PLmin = PL; if not, set PLmax = PL. S10: Compare the difference between PLmax and PLmin. If it is not greater than the set accuracy ε, output the optimization results. Otherwise, return to S9. Continue the optimization process until the desired level of calculation accuracy is achieved, and subsequently present the optimized results as output.
2.4.3. Programmatic Implementation of Optimization Algorithms
- (1)
The programmatic implementation of the micropile theory calculation method relies on the solution of the difference control equations.
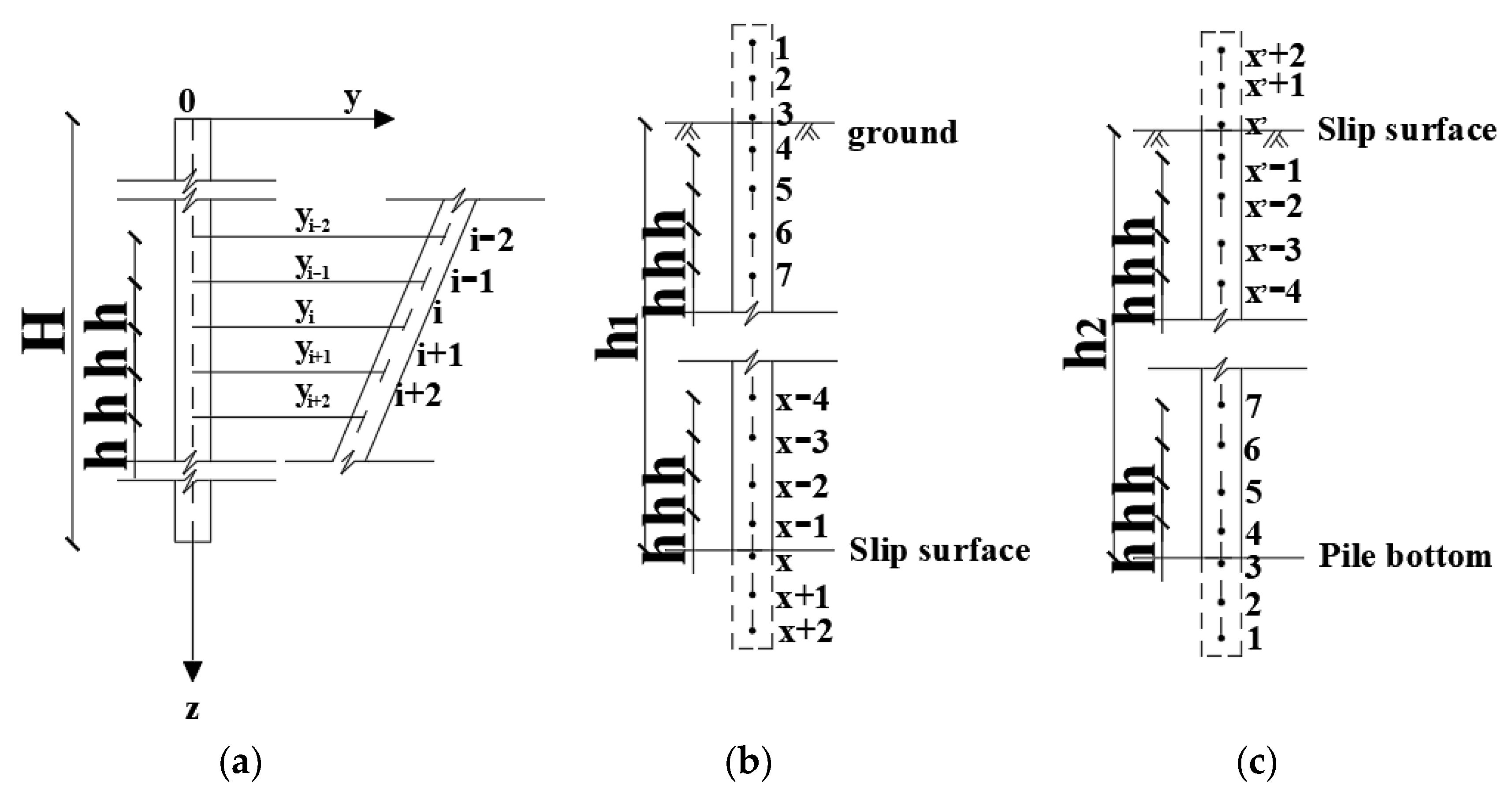
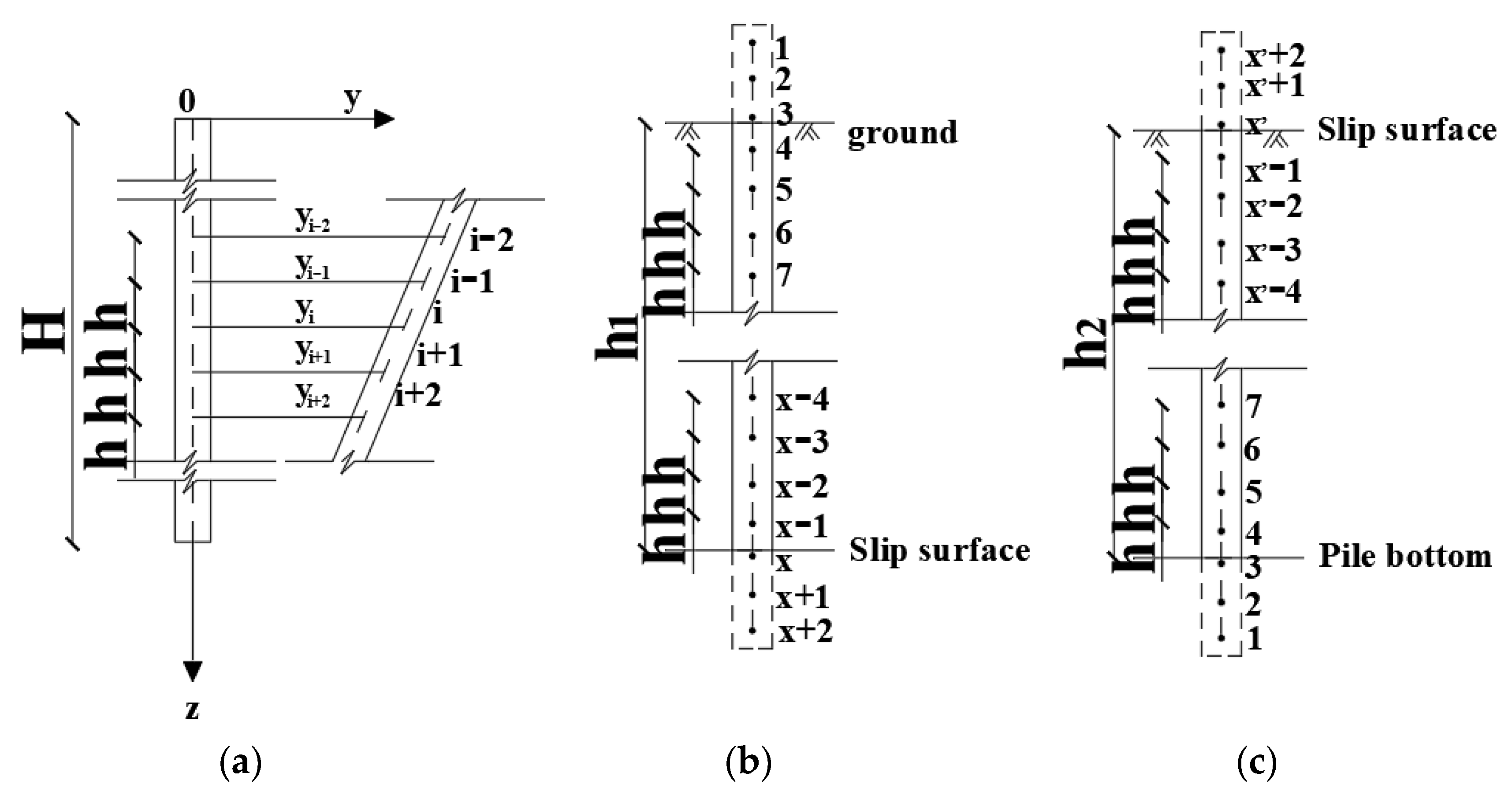
The key to implementing the theoretical calculation method for micropiles lies in solving the differential control equation. The specific approach is to derive the corresponding recursive formula and its parameter values from the boundary of the pile body from both ends. Then, the current equation group is formed with the continuity condition near the sliding surface, and the node displacement near the sliding surface is solved, which is gradually diffused to the entire pile length to complete the solution of the displacement equation. To optimize space utilization, we present the recursive equations for parameters and node displacement in both “m-m” and “m-k” methods based on the differential calculation model depicted in
Figure 3. These equations can be readily programmed for solution. The specific derivation process will not be repeated.
- ①
The “m-m” method
- (a)
Parameter recursive formula for the loaded section:
Initial value:
,
,
; (This initial value is not involved in the operation and is used here as a placeholder for nan);
-
In the formula , refer to the previous section for the meaning of other parameters.
- (b)
Recursive formula for embedded segment parameters:
Initial value: , , ; (This initial value is not involved in the operation and is used here as a placeholder for nan);
Considering various forms of support at the base, there are corresponding alterations in the initial value. The specific values are shown in
Table 3 below:
Recursion: ;
; ;
In the formula , refer to the previous section for the meaning of other parameters.
Based on the continuity conditions of displacement, rotation, bending moment, and shear force at the sliding surface position of the micropile, combined with the recursive calculation equation derived from Equation (6), the following linear equation group can be obtained by taking the five points near the sliding surface as shown in
Figure 3: X − 2, X − 1, X, X + 1, X + 2:
Displacement continuity:
Continuous cornering:
Shear continuity:
Continuous bending moment:
Recurrence formula for the loaded section:
Recursive formula for embedded segments:
A set of ten equations is provided, which can be solved to determine ten unknown displacement variables. Then, according to the corresponding recursive formula, the displacement values of all nodes of the micropile can be iteratively obtained, and the internal force of the micropile and the soil pressure can be further calculated.
- ②
The “m-k” method
The main difference between the “m-k” method and the “m-m” method is that the former uses a constant foundation coefficient in the embedded section of the pile. Based on the “m-m” method derivation results mentioned above, the recursive outcomes of embedded section parameters reflect the primary discrepancy between the two calculations. For the “m-k” method:
- (a)
Parameter recursive formula for the loaded section:
Initial value: same as the “m-m” method;
Recursive: same as the “m-m” method;
- (b)
Parameter recursive formula for the embedded section:
Initial value: , the rest are the same as the “m-m” method;
Recursion: ; the rest are the same as the “m-m” method;
In the formula , refer to the previous section for the meaning of other parameters.
The continuity condition and recursive equation at the sliding surface for the “m-k” method are identical to those of the “m-m” method, while the solution approach remains essentially unchanged. This will not be reiterated herein.
The m-method and k-method are based on the code to determine the deformation characteristics presented under the action of landslide thrust, i.e., whether it is a rigid or elastic anti-slip pile. This directly affects the form of distribution of soil pressure at the embedded end. The distribution form of earth pressure is determined by the type of judgment through the actual parameter calculation, and the distribution form of the finite element model is determined by the actual force form. Then, the m-m method and m-k method are used to screen out the optimal pile length, which is applied in the finite element model.
- (2)
Numerical simulation rapid modeling
Numerical simulation rapid modeling technology is the key to the finite difference solution used in the optimization method in this study. In order to achieve the engineering operability of the optimization process, modeling work must be fast, convenient, and easy to master. Therefore, this study designs an automated rapid modeling algorithm for numerical simulation from section to model and briefly introduces this module.
- ①
CAD graphics recognition and processing
In order to facilitate programming processing, the dxf file used as the input of the model section shape needs to meet certain drawing specifications, including ① The graphics should only contain section stratigraphic lines, slope lines, and sliding surface lines without any other extraneous graphic elements; ② All lines are single lines; ③ In order to facilitate the program to identify the function of the line, different stratigraphic lines should be distinguished by relative line widths, with the sliding surface line being the thinnest, followed by the slope line, and the other stratigraphic lines gradually increasing line width according to the decrease in their elevation.
The dxf file format is essentially a text file, which records information such as the starting point, ending point, and line width of the line in the form of keywords. It is easy to extract these key information through programming and classify their functions according to the line width specifications mentioned above so as to obtain the coordinate information of various types of lines in the section.
- ②
Plane modeling and coordinate adaptation
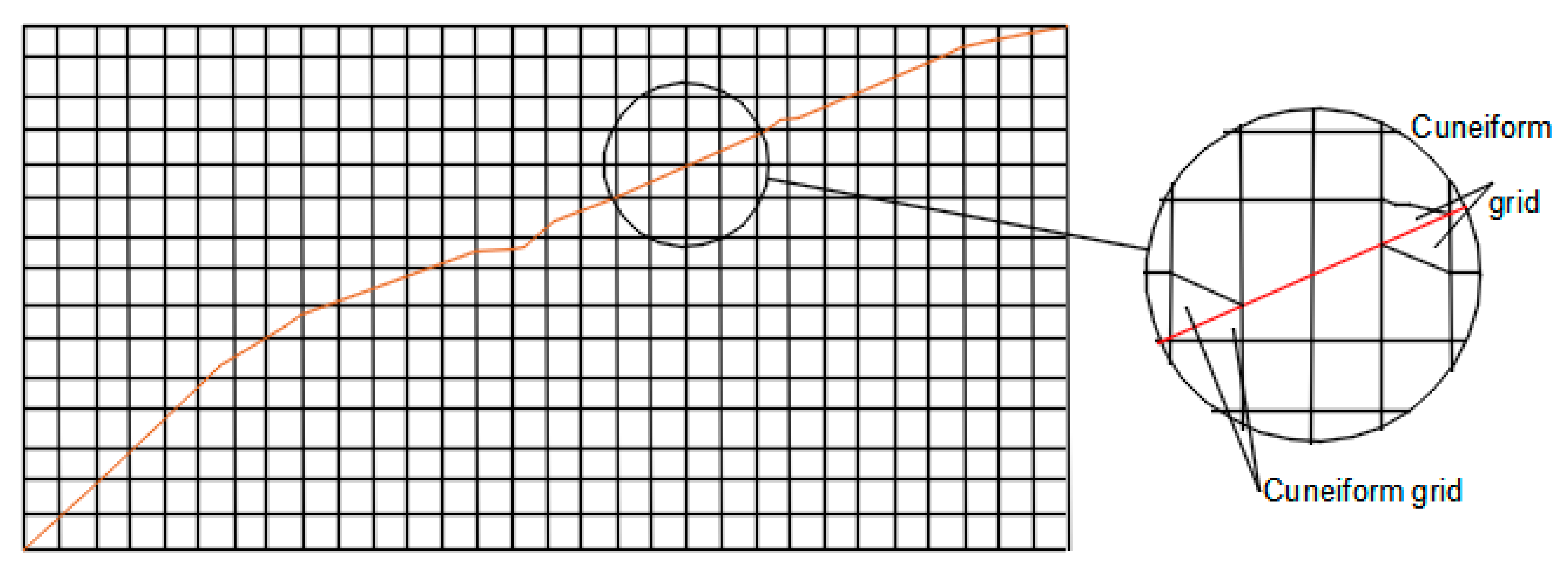
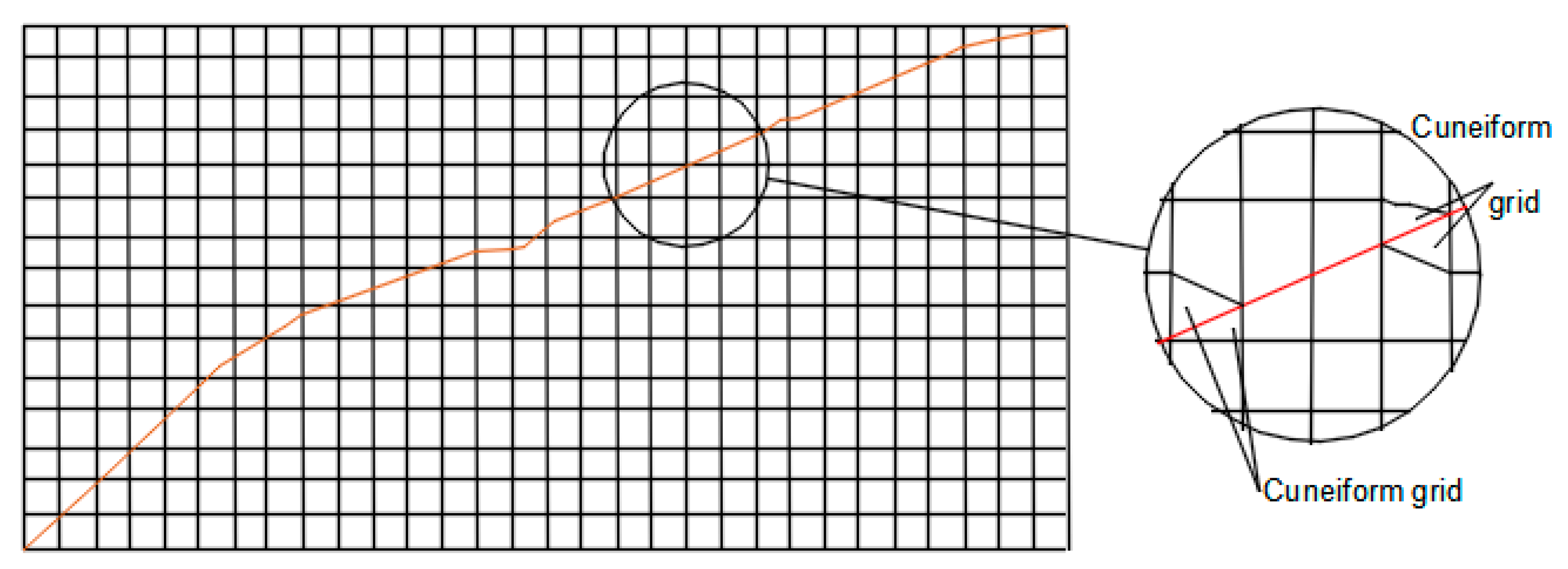
Plane modeling is based on the coordinate information extracted from CAD graphics recognition. As shown in
Figure 6, for an irregular stratigraphic line, a rectangular grid is established to completely cover the stratigraphic line. The size of the rectangular grid can be controlled by input variables, which is also the basic grid size of the model. After the plane modeling is completed, in order to make the model grid adapt to changes in the terrain, the coordinates of the grid are offset nearby, as shown in the enlarged schematic diagram in
Figure 6. In this manner, trapezoids or triangles are employed to substitute the initial regular rectangular grids in proximity to the stratigraphic line, thereby enabling the grid to conform with the stratigraphic line.
By applying this method to process all the stratigraphic lines in the model, corresponding sectional grid divisions can be obtained, which provides a foundation for subsequent 3D stretching modeling. It should be noted that the plane coordinate and coordinate adaptation algorithm are critical components throughout the modeling process. After this process is completed, the quality of the model grid usually needs to be manually checked. In cases where the slope line is steep but increasing grid quantity is not feasible, local irregularities may arise at the contact between strata. To address this issue, stretching the x-coordinate during dxf graphics processing can be employed to achieve a gentler slope. After the modeling is complete, the x-coordinate can be restored through the “ini xpos multiply” command.
- ③
3D Stretching and Node Generation The plane grid model obtained from the previous step is stretched and expanded to form a three-dimensional space coordinate with multiple layers from the plane coordinates. After being stretched, the three-dimensional coordinates of all points become the most basic elements of the numerical simulation model-node coordinates.
- ④
Unit Composition and Grouping numerical simulation units are composed of nodes. For hexahedral elements, there are eight control points named p0, p1...p7. The positions of these eight points must conform to the “right-hand rule” and cannot be arbitrarily reversed. The composition of numerical simulation units is to arrange the serial numbers of these eight nodes in the prescribed order and assign a unit number to them. For the mesh nodes obtained by the aforementioned plane modeling and stretching, most of them can form hexahedral elements. However, for a small number of cases where the stratigraphic line passes through a quadrilateral mesh, as shown in
Figure 6, it needs to be split into two triangles. The construction of two wedge-shaped elements for smooth grouping of the model is limited to only the nodes located on both sides of the stratigraphic line. In the program implementation, once the relative position between the unit-forming nodes and the stratigraphic line is recognized in programming, it becomes straightforward to identify these nodes requiring division into wedge-shaped elements and accomplish unit composition for the entire model.
After the unit composition, the constructed units can be grouped according to the stratigraphic boundaries. For ease of operation, the geometry geological interface grouping technology built into numerical simulation is used for rapid grouping. Specific operations can refer to the numerical simulation technical manual.
After completing these four key steps, it is possible to directly generate a numerical simulation calculation model from the profile map. With corresponding programming operations, this process has a high degree of automation and can achieve one-button modeling. This rapid modeling technology also overcomes the complex obstacles of modeling for optimization solving using the finite difference method with numerical simulation software.
- (3)
Generation of numerical simulation calculation commands
To further ensure the engineering feasibility of the optimization program and reduce the difficulty of writing numerical simulation optimization command streams for different landslide forms and parameters, command streams that can be used for optimization calculations are automatically generated. Based on the calculation results mentioned earlier and the parameter transmission, this study uses an Excel spreadsheet to assign basic numerical simulation parameters and then reads these data through a program, combining the results of parameter transmission to generate numerical simulation calculation command streams for initial stress balance calculation, initial slope stability calculation, and pile stability calculation.
- (4)
Analysis and presentation of optimization results
The optimization solution process described in the previous section obtains a table of corresponding pile lengths and safety factors. After achieving convergence, the internal forces of the pile can be extracted and analyzed under the optimal working condition corresponding to the converged solution, facilitating automatic graph generation. This result is the internal force distribution result obtained by numerical simulation analysis. In practical operation, it can be compared with the results obtained by theoretical calculation, and if necessary, the larger value can be taken as the design value of the structural internal force.
2.4.4. Example Analysis
The selected example is a typical landslide behind a plant in the northwest region, with a slope width of about 160 m, a length of about 95 m, and a height difference of about 32 m between the front and the back edge. Slip material for the original slope area of the slope surface residual slope deposits and the overlying Loess landslide form is more obvious, with a slope of about 15°~25°. According to survey data, the stratigraphic parameters are taken as shown in
Table 4. The characteristic period of the ground vibration response spectrum within the project area is 0.35 s, with a design basic seismic acceleration value of 0.15 g and corresponding seismic intensity at level VII.
According to the stability calculation based on the parameters provided by the survey, the results show that the stability safety coefficient of the slope body is only 1.03 in the natural state, less than 1.0 in the saturation condition, and less than 1.05 in the earthquake condition. Its stability level is poor, and engineering treatment is urgently needed. Considering the relatively modest annual rainfall in the project area and favorable natural drainage conditions surrounding the slope, achieving full saturation becomes challenging. Therefore, engineering calculations are conducted using parameters representative of the natural state.
According to the calculation profile and stratigraphic parameters provided by the survey, the landslide thrust is calculated using the transfer coefficient method recommended by the code, and the landslide thrust at the proposed pile location is about 548.64 kN/m (the safety factor is taken as 1.2). The load-sharing ratios obtained under static and dynamic working conditions can be calculated separately to obtain the load-sharing table, as shown in
Table 5.
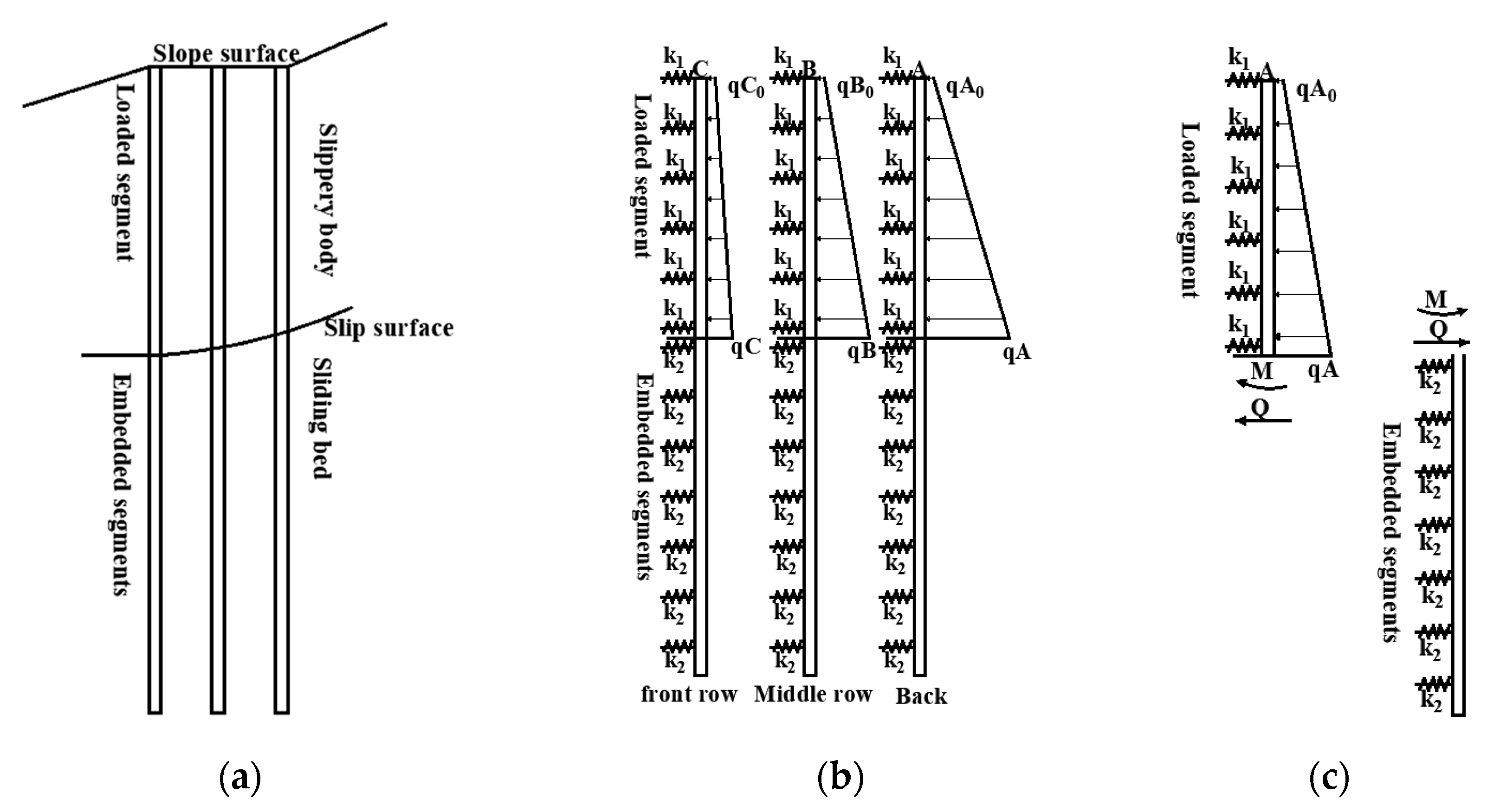
Based on the landslide form and thrust level of the treatment project, the engineering design proposes utilizing a minipile group for landslide remediation. As shown in
Figure 6, three rows of minipiles with 0.15 m pile diameter, 1.5 m pile spacing, and 1.4 m row spacing are used in a plum-shaped arrangement.
In order to simplify the engineering calculation and reduce the construction difficulty, the same design section is used for the three rows of piles, and the maximum thrust force is
p = 225.5 kN/m. It is assumed that the thrust is triangularly distributed for the design calculation of the minipile and the calculation method is based on the calculation theory in
Section 1, and the “m-m” method is used. The values of foundation coefficients are taken as shown in
Table 6 below.
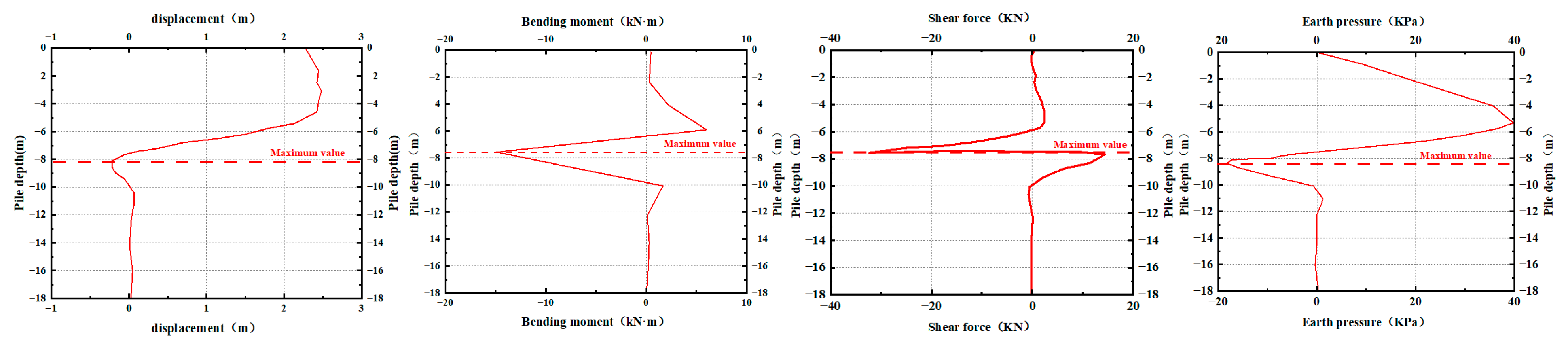
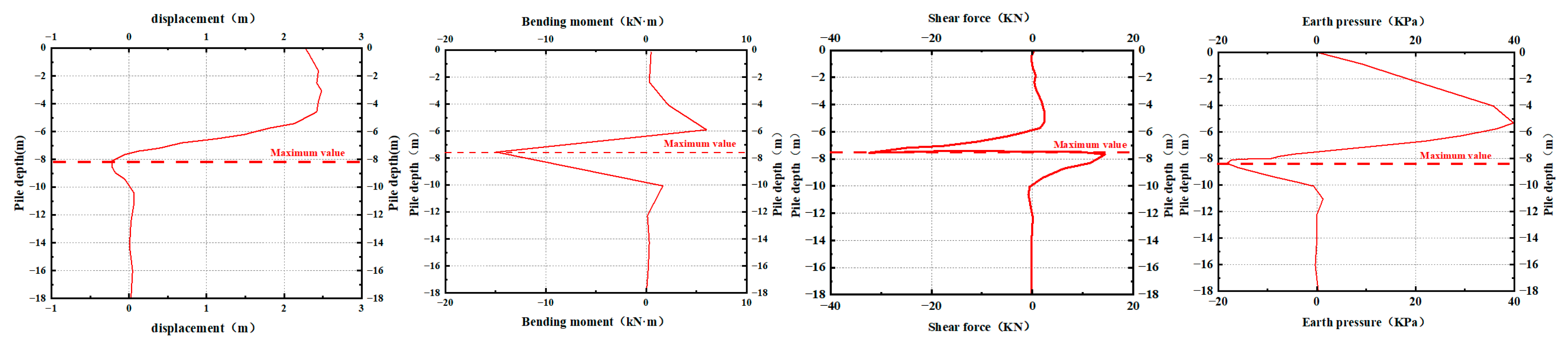
The calculation assumes a fixed pile bottom, and the determined length of the pile is based on empirical evidence to ensure that the minipile can penetrate the clay rock layer by at least 3 m, which is temporarily set as 18 m in this study. The calculated displacement, internal force, and earth pressure curves are shown in
Figure 7.
From the figure, it can be seen that the maximum bending moment is about 15.44 kN·m, and the maximum shear force is about 35.25 kN, from which the reinforcement calculation is carried out. In order to facilitate the construction, a steel pipe concrete minipile is used for this minipile, so according to the Technical Specification for Steel Pipe Concrete Structure (GB50936-2014) [
30], Q235 steel pipe with 152 mm outer diameter is used and C30 fine stone concrete is injected inside, according to the wall thickness was calculated to be about 2.7 mm according to the requirements of bending shear resistance, so the steel pipe specification was selected as φ152 mm × 3 mm.
According to the calculation results in the previous section, the optimal design is carried out with PLmax = 18 m, PLmin = 10 m, and setting the allowable safety factor [Fs] = 1.40.
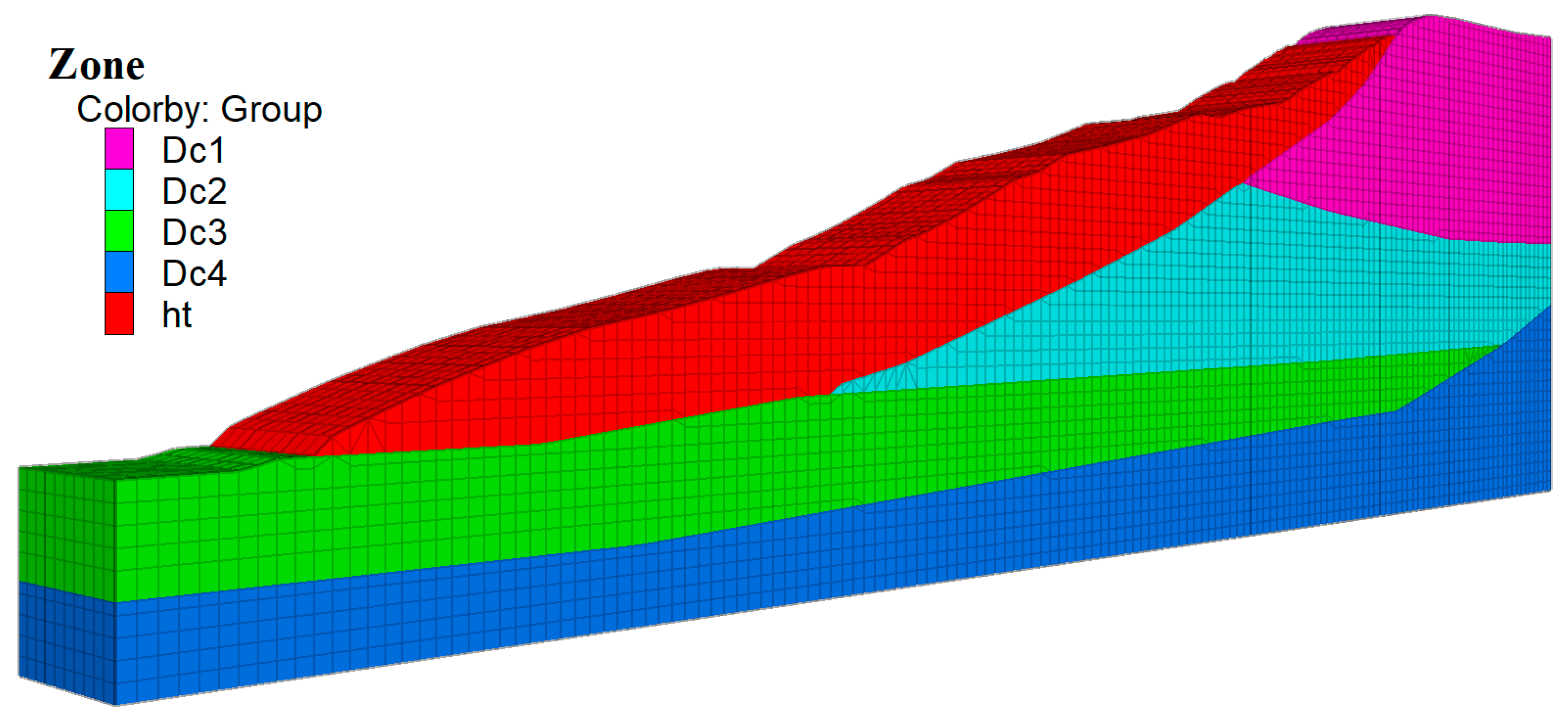
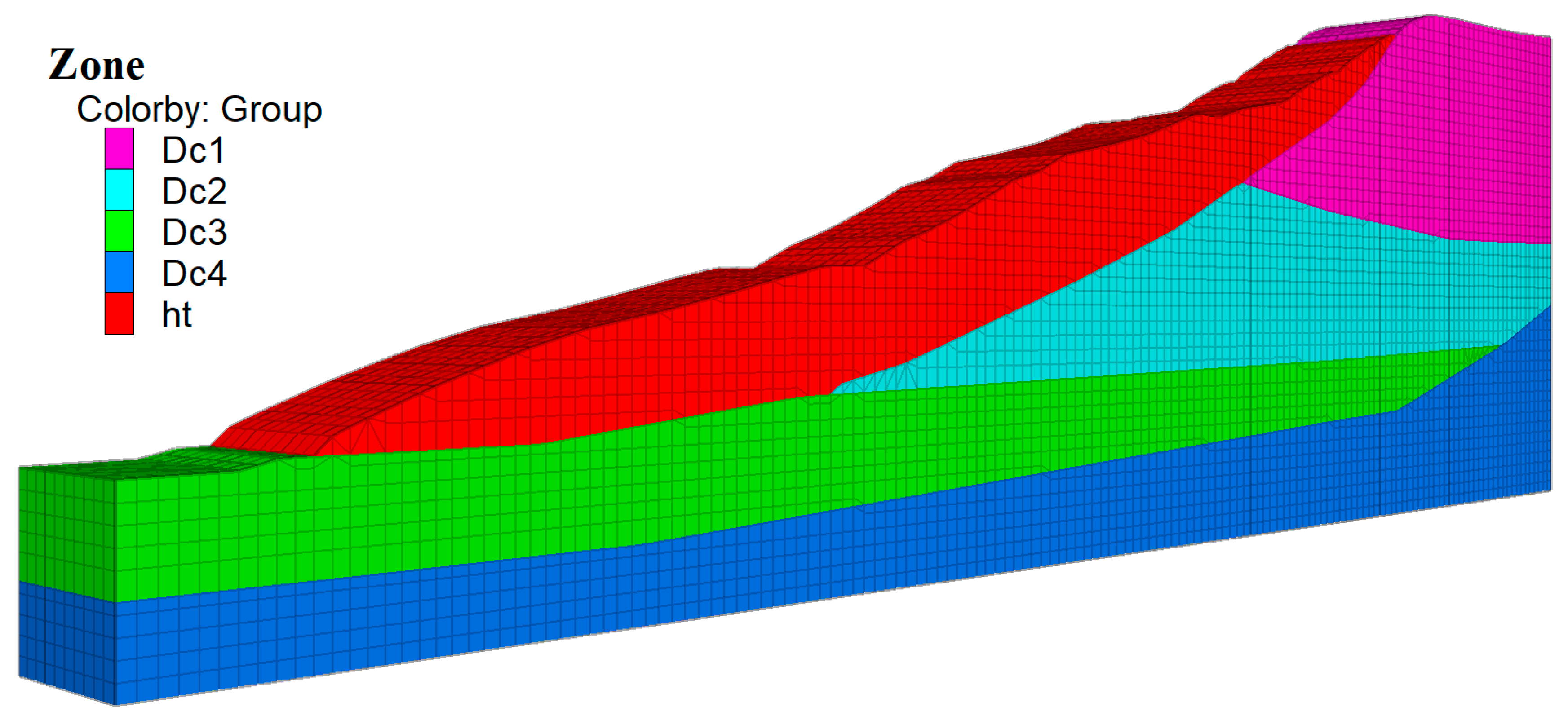
As shown in
Figure 8, the model length and height are consistent with the profile, and the width is 10 m. The meshing process employs hexahedral and tetrahedral cells, resulting in a total of 49,371 nodes and 44,310 cells. The calculation assumes a fixed pile bottom, and the determined length of the pile is based on empirical evidence to ensure that the minipile can penetrate the clay rock layer by at least 3 m, which is temporarily set as 18 m in this study.
The soil parameters of the optimized calculation model were taken with reference to its surveyed stratigraphic parameters table, see
Table 4. The structural unit parameters were taken according to
Table 7.
The optimization procedure is calculated according to the preset relevant parameters, and its optimization process is shown in
Table 8.
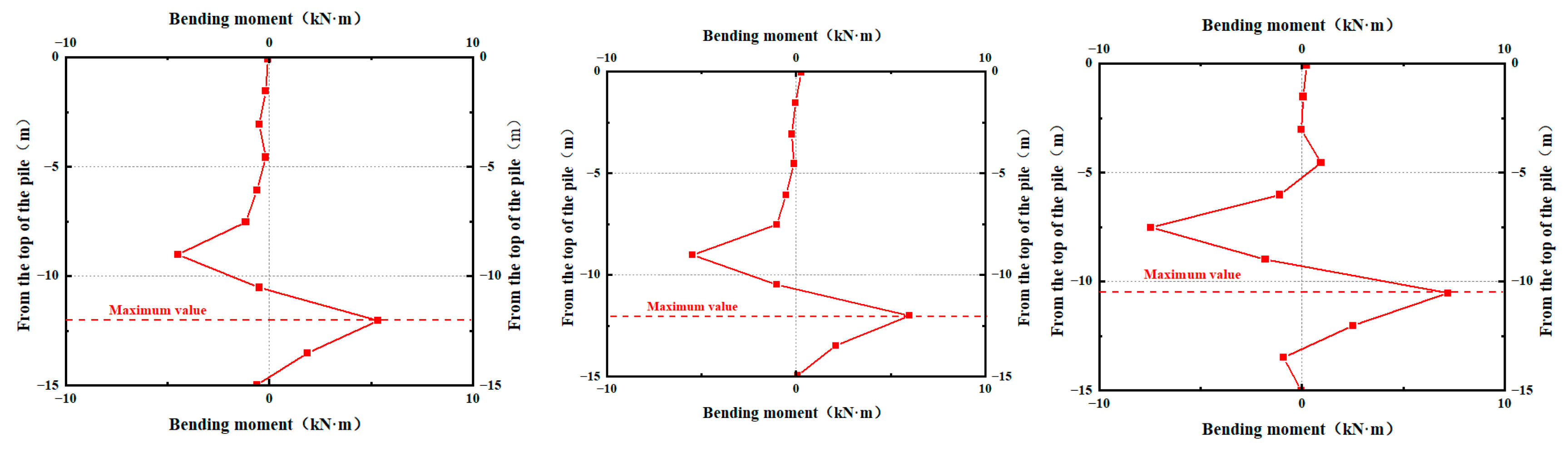
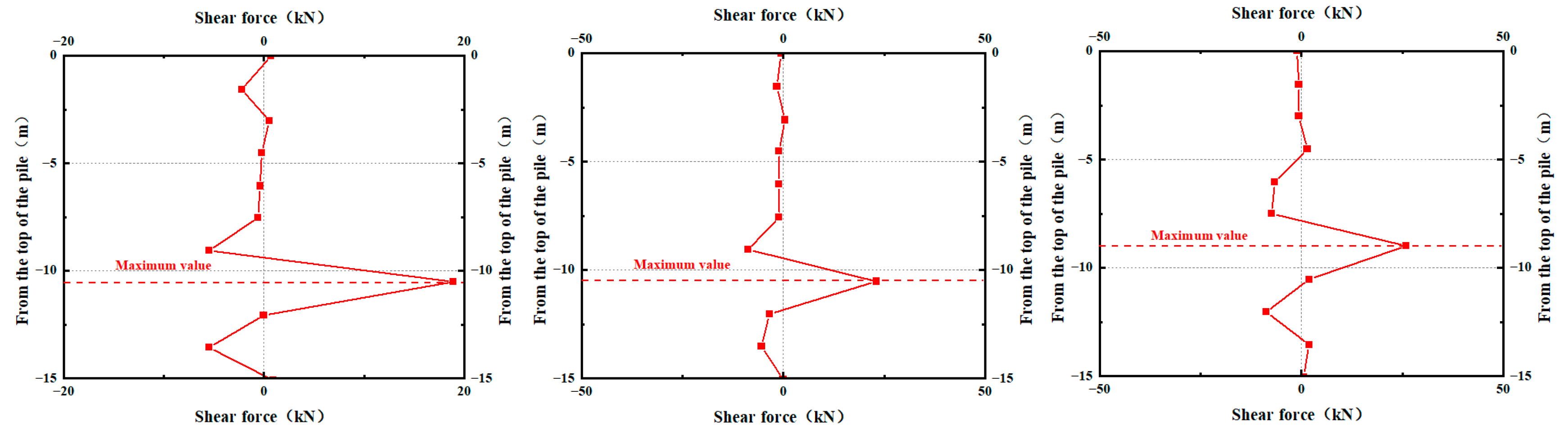
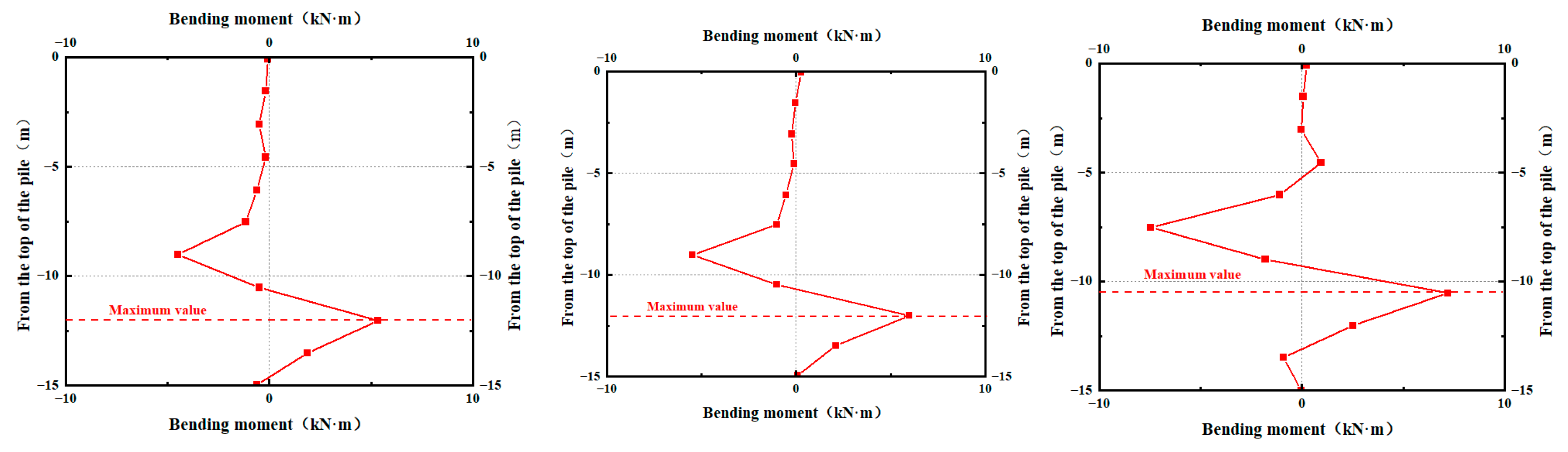
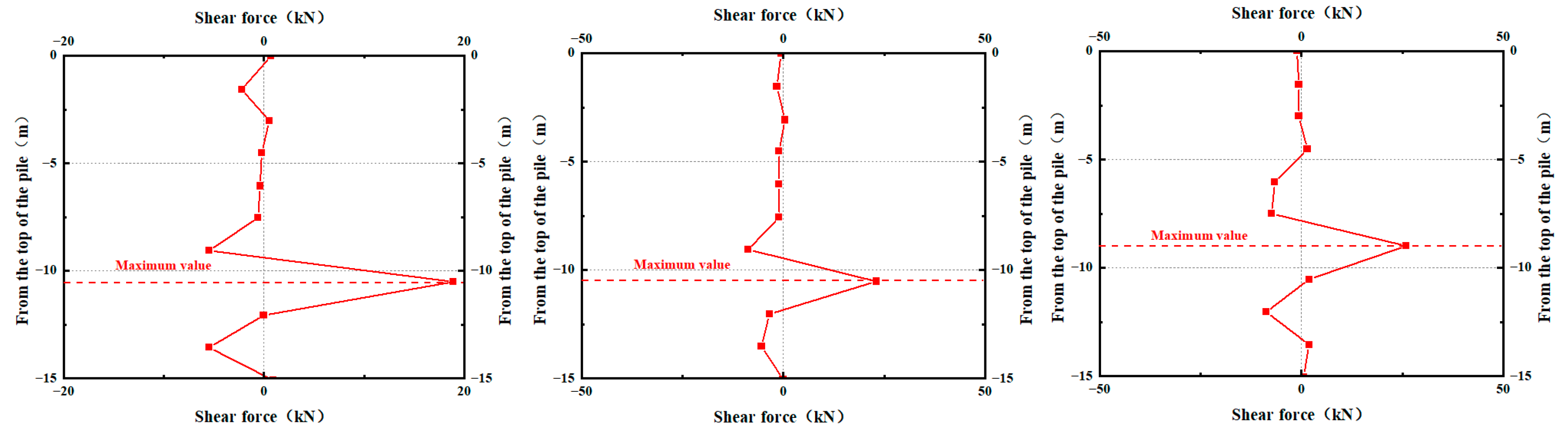
The pile length obtained from the optimization calculation is PL = 15 m. The internal forces of the minipile after the optimization calculation is completed are extracted, and the results of its bending moment and shear force calculation are presented in the following figures (
Figure 9 and
Figure 10). The numerical simulation results reveal that the rear row pile exhibits the highest bending moment, followed by the middle row pile, and finally, the front row pile displays the lowest bending moment. The maximum value of bending moment for all minipiles is 7.539 kN·m, and the maximum value of shear force is 26.47 kN, which is small compared with the results of theoretical calculations. As depicted in the figure, the numerical simulation results indicate that the rear row pile exhibits the highest bending moment, followed by the middle row pile and the front row pile with the lowest magnitude.
Overall, the optimized design has successfully achieved its intended objective, and through engineering practice, the calculation method and optimization approach outlined in the previous section have been demonstrated to be more dependable.



 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}