
An Objective Evaluation Method for Driver/Passenger Acceptance of an Autonomous Driving System for Lane Changes

Abstract
:1. Introduction
2. Driver/Passenger Acceptance
2.1. Definition of Driver/Passenger Acceptance
“Acceptance is the classification to which an individual intends to use the system in his/her driving if the system is incorporated.”
2.2. Measurement of Driver/Passenger Acceptance
3. Driver/Passenger–Vehicle Interaction Database
4. Objective Evaluation Methodology for Passenger Acceptance
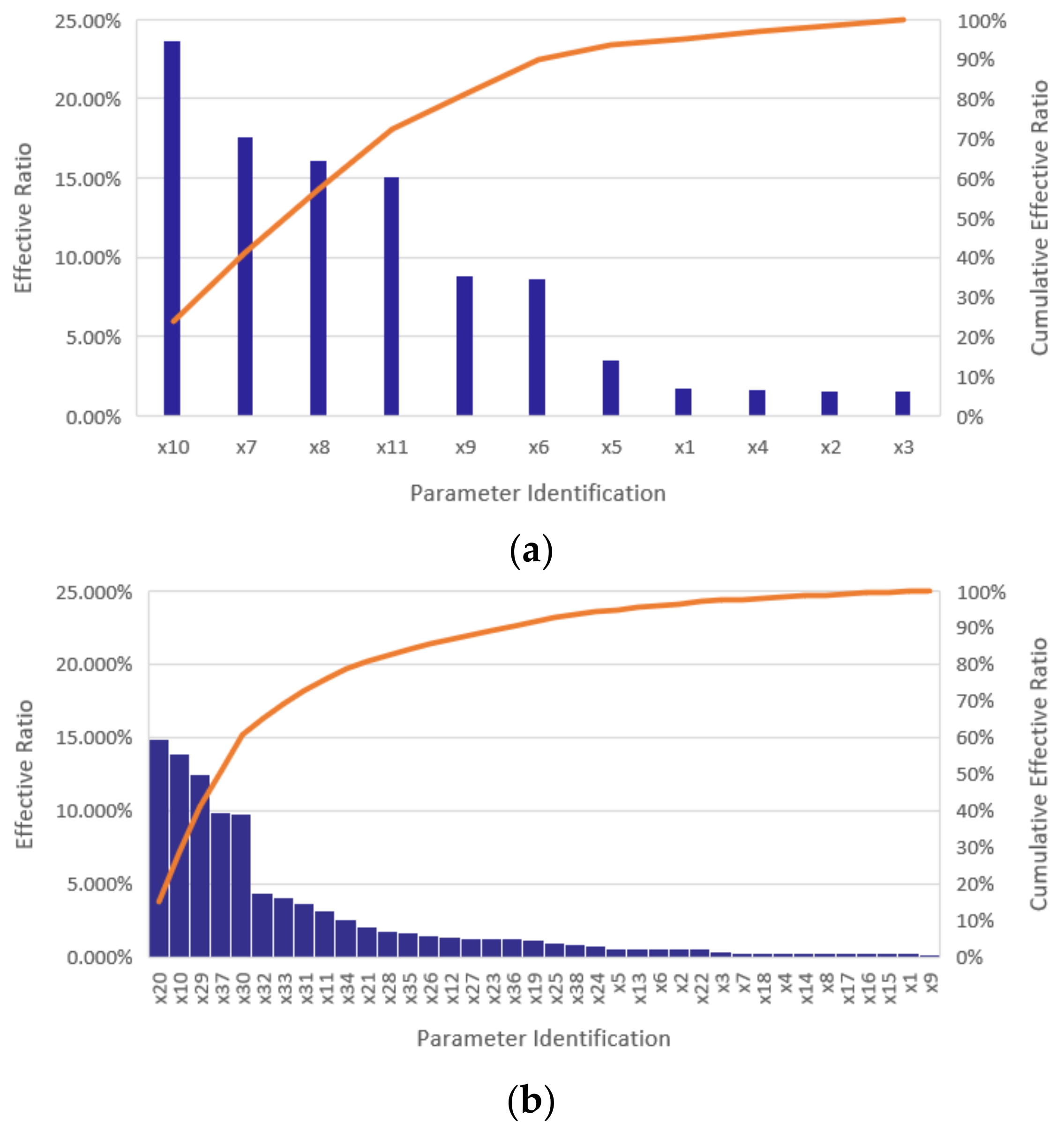
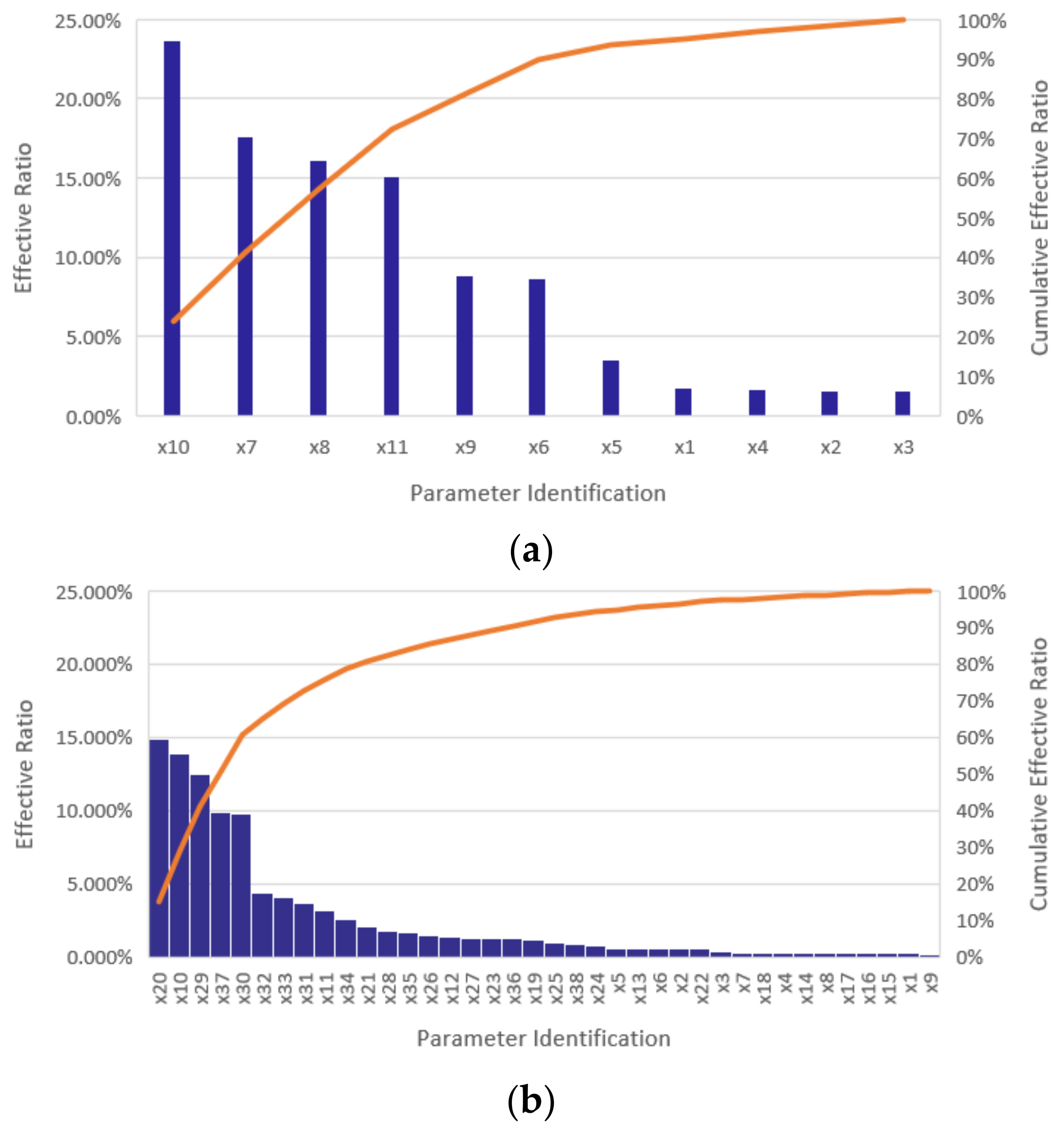
4.1. Methodology of Objective Parameter Analysis and Selection
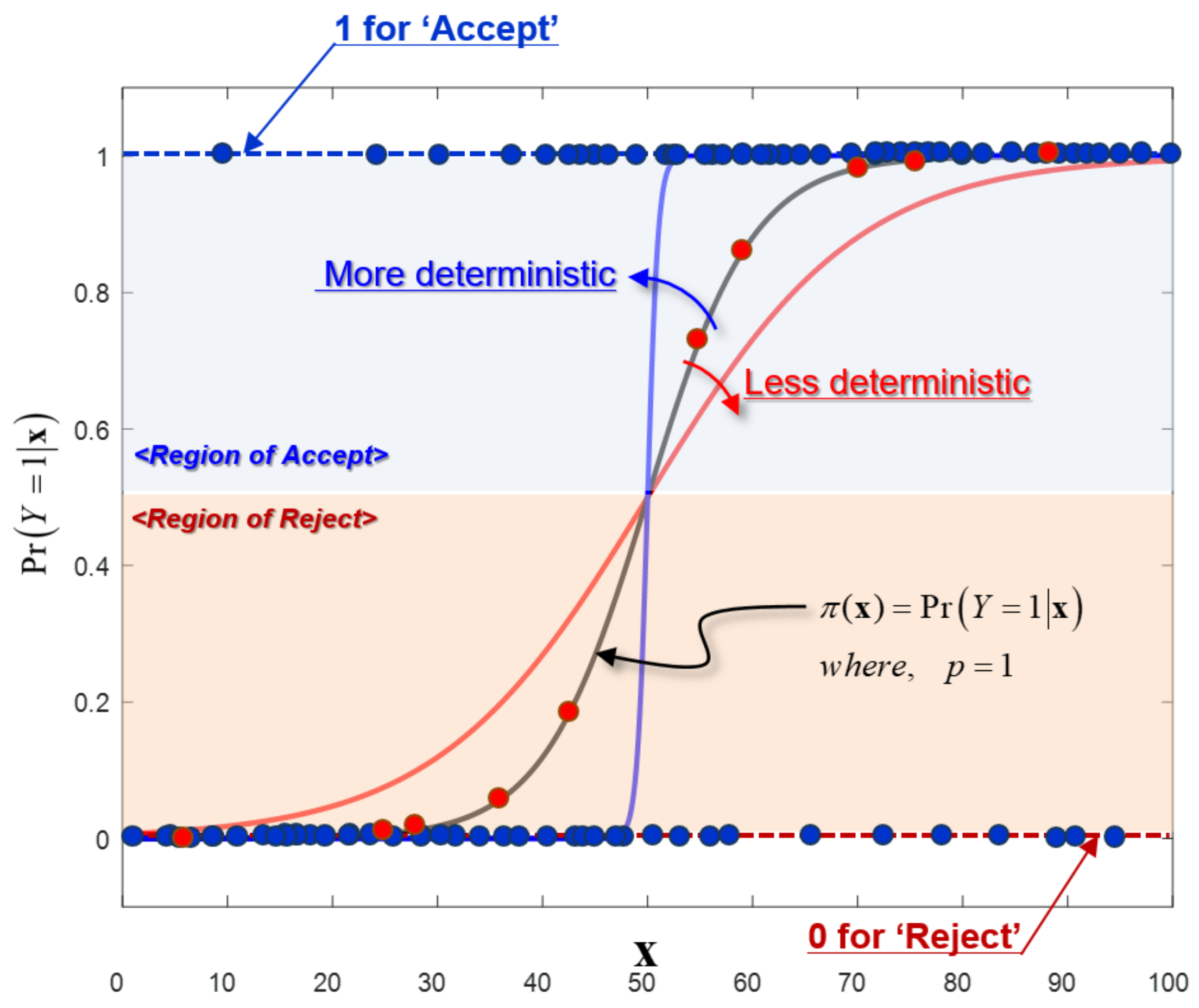
4.2. Stochastic Estimation and Evaluation of the Acceptance
5. Driver Acceptance Evaluation Model
5.1. Parameter Selection
5.1.1. Objective Parameters

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Objective Factors | Description | ||
|---|---|---|---|
| First Level | 2nd Level | 3rd Level | |
| Control Command | TPS | Minimum | Throttle position sensor |
| Maximum | |||
| Median | |||
| Mean | |||
| Standard Deviation | |||
| ↑ | Steering wheel angle | ||
| ↑ | Steering wheel angular velocity | ||
| Vehicle behavior | Minimum | Longitudinal velocity | |
| Maximum | |||
| Median | |||
| Mean | |||
| Standard Deviation | |||
| ↑ | Lateral velocity | ||
| ↑ | Longitudinal acceleration | ||
| ↑ | Lateral acceleration | ||
| ↑ | Longitudinal jerk | ||
| ↑ | Lateral jerk | ||
| ↑ | Yaw angle | ||
| ↑ | Yaw angular velocity | ||
| ↑ | Yaw angular acceleration | ||
| ↑ | Roll angle | ||
| ↑ | Roll angular velocity | ||
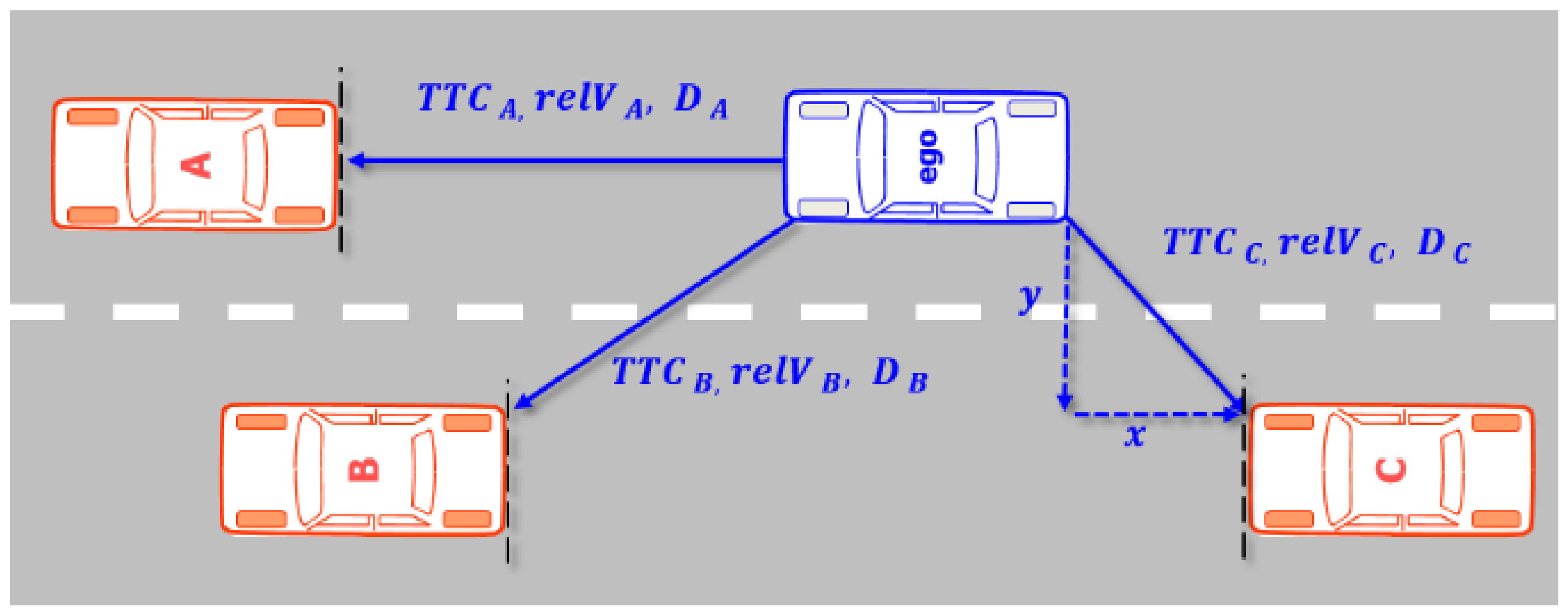
| Vehicle Relationships (Targets A, B, C) | TTC | Minimum | Time to collision |
| Maximum | |||
| Median | |||
| Mean | |||
| Standard Deviation | |||
| TTCx | ↑ | Longitudinal time to collision | |
| TTCy | ↑ | Lateral time to collision | |
| relV | ↑ | Relative velocity | |
| relVx | ↑ | Longitudinal relative velocity | |
| relVy | ↑ | Lateral relative velocity | |
| D | ↑ | Distance | |
| Dx | ↑ | Longitudinal distance | |
| Dy | ↑ | Lateral distance | |
5.1.2. Acceptance in Relation to the Control Commands
5.1.3. Acceptance in Relation to Vehicle Behaviors
5.1.4. Acceptance in Relation to Traffic
| Parameter | Unit | Descriptive Statistics | Significance Test (1) | Acceptance Sensitivity (%) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Accepted | Rejected | |||||||||
| E[X] | Var[X] | E[Y] | Var[Y] | t | p-Value | |||||
| A | maximum | s | 0.269 | 172.598 | 0.752 | 943.830 | 0.068 | 0.946 | 179.044 | |
| minimum | s | −0.011 | 10.888 | −1.245 | 2.103 | −1.155 | 0.256 | 11,743.861 | ||
| standard deviation | s | 0.178 | 1.008 | 0.743 | 0.711 | 2.383 * | 0.023 | 317.775 | ||
| mean | m/s | −3.271 | 36.888 | 0.619 | 6.732 | 2.026 * | 0.048 | 81.076 | ||
| maximum | m/s | 0.141 | 0.717 | 0.425 | 3.978 | 0.850 | 0.399 | 201.364 | ||
| mean | m/s | −0.029 | 0.925 | 0.066 | 2.591 | 0.335 | 0.739 | 126.919 | ||
| B | maximum | s | 9.012 | 524.509 | 21.989 | 523.151 | 1.518 | 0.135 | 143.988 | |
| standard deviation | s | 1.292 | 28.789 | 4.229 | 26.036 | 1.562 | 0.125 | 227.424 | ||
| minimum | s | −1.270 | 91.603 | 3.869 | 40.250 | 1.412 | 0.164 | 204.690 | ||
| maximum | s | 2.820 | 309.389 | 10.483 | 167.218 | 1.227 | 0.226 | 271.747 | ||
| median | s | 0.075 | 93.049 | 4.964 | 53.769 | 1.336 | 0.188 | 6535.908 | ||
| mean | s | 0.174 | 105.859 | 5.522 | 64.751 | 1.396 | 0.169 | 3069.538 | ||
| maximum | m/s | −0.244 | 5.861 | 1.633 | 18.280 | 1.458 | 0.151 | 570.526 | ||
| maximum | m/s | 0.015 | 37.588 | −0.225 | 0.933 | −0.417 | 0.679 | 1362.499 | ||
| C | minimum | s | −0.367 | 196.754 | −5.056 | 1369.453 | −0.410 | 0.684 | 1279.101 | |
| median | s | 4.123 | 153.344 | 20.982 | 1271.483 | 1.441 | 0.156 | 408.877 | ||
| minimum | s | −2.701 | 23.580 | −9.611 | 127.935 | −1.422 | 0.164 | 255.864 | ||
| median | s | −1.881 | 21.257 | −5.473 | 110.934 | −0.865 | 0.392 | 190.902 | ||
| mean | s | −0.097 | 12.920 | −3.118 | 60.352 | −0.794 | 0.432 | 3119.044 | ||
| standard deviation | s | 1.867 | 3.187 | 4.419 | 20.275 | 1.277 | 0.210 | 136.632 | ||
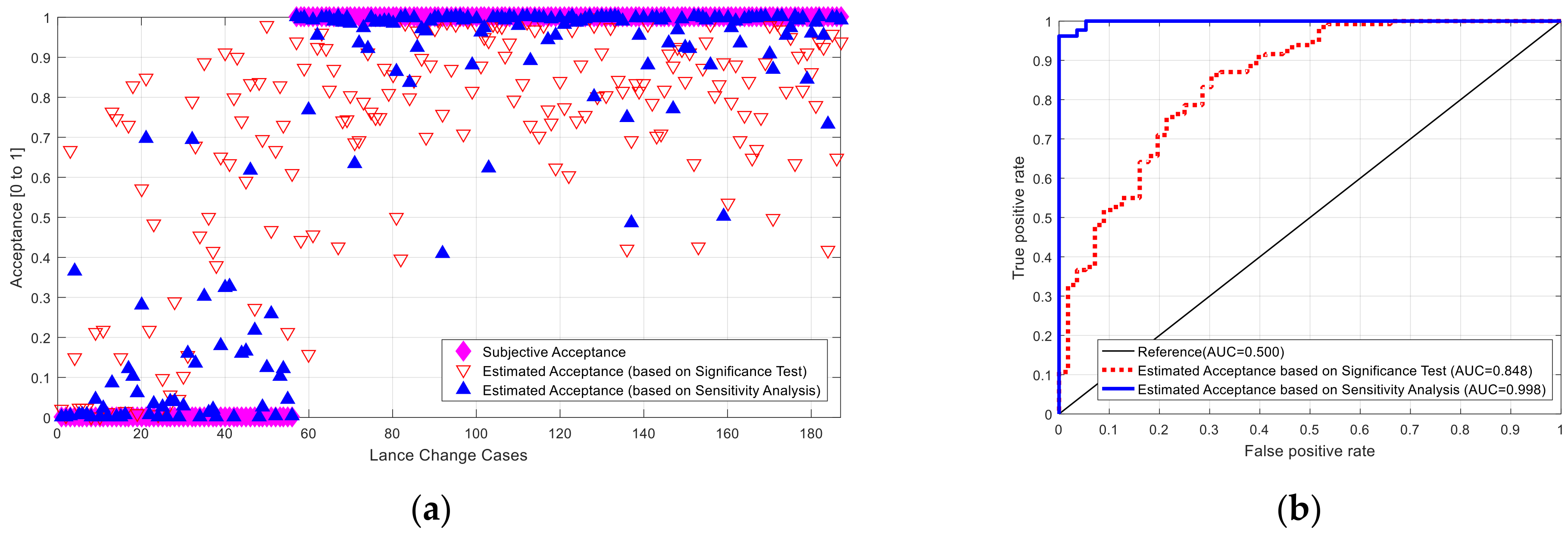
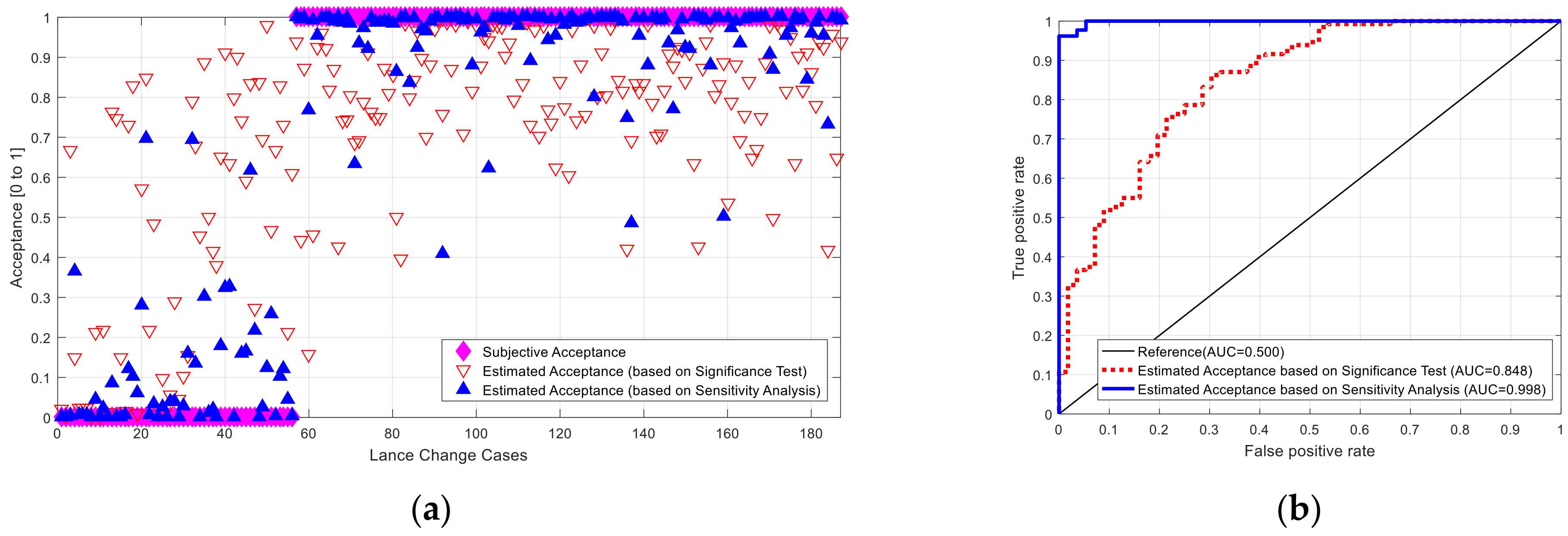
5.2. Modeling of Driver Acceptance
| Model Classification | Performance Index | Rejected (Sample Size: 56) | Accepted (Sample Size: 131) | Total (Sample Size: 187) |
|---|---|---|---|---|
| Driver Acceptance Model using Statistical Significance p-value | E[SE] | 0.428 | 0.183 | 0.256 |
| Var[SE] | 0.108 | 0.025 | 0.062 | |
| SSE | 16.267 | 7.638 | 23.905 | |
| Accuracy (number of correct) | 53.57% (30) | 75.57% (99) | 68.98 (129) | |
| AUC | 0.848 | |||
| Driver Acceptance Model using Acceptance Sensitivity | E[SE] | 0.107 | 0.046 | 0.064 |
| Var[SE] | 0.028 | 0.010 | 0.016 | |
| SSE | 2.200 | 1.622 | 3.822 | |
| Accuracy (number of correct) | 94.64% (53) | 98.47% (129) | 97.33 (182) | |
| AUC | 0.998 |
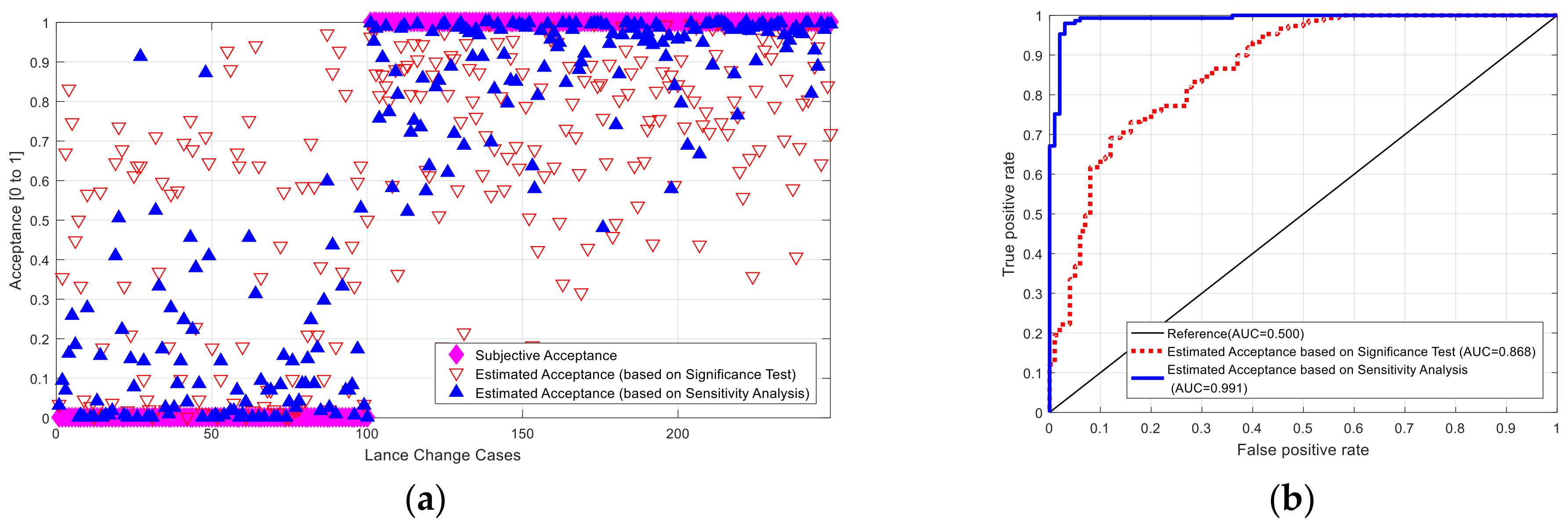
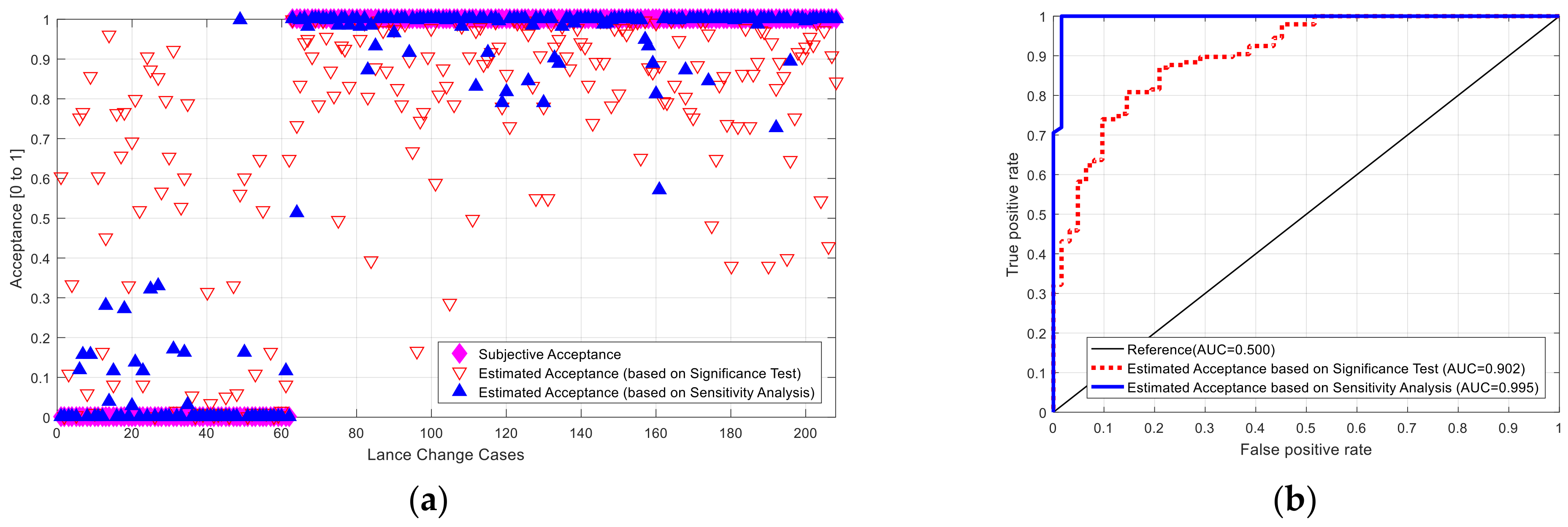
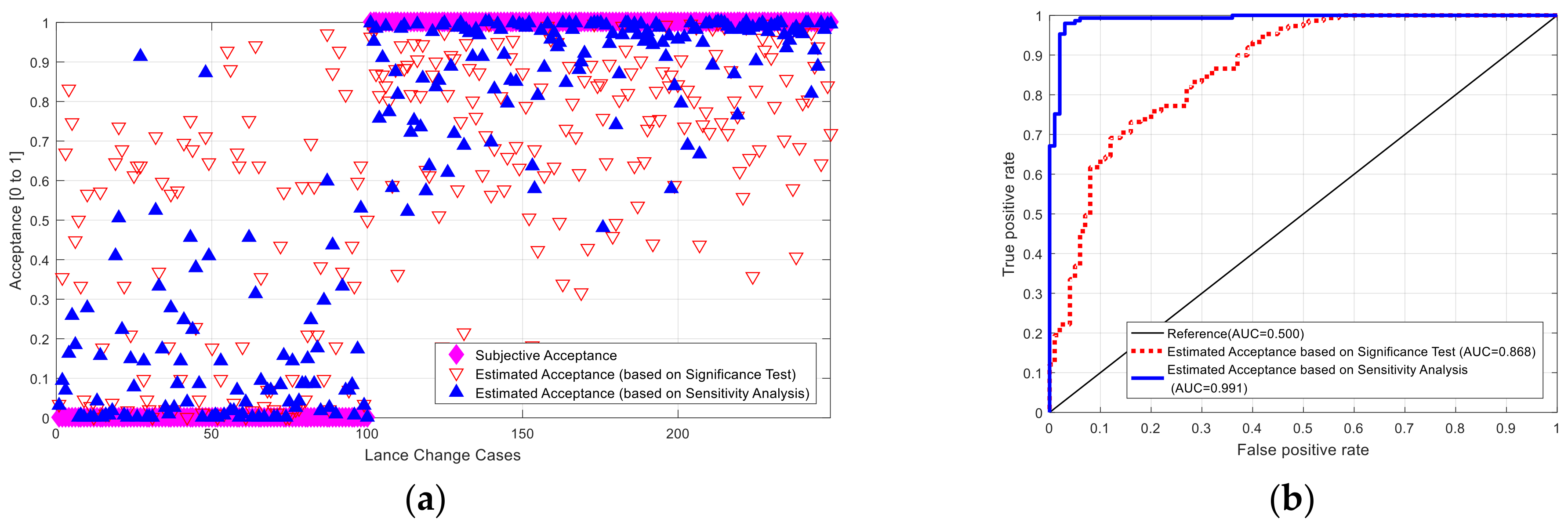
5.3. Verifications of the Suggested Model
| Model Classification | Performance Index | Rejected (Sample Size: 100) | Accepted (Sample Size: 149) | Total (Sample Size: 249) |
|---|---|---|---|---|
| Driver Acceptance Model using Statistical Significance p-value | E[SE] | 0.342 | 0.230 | 0.275 |
| Var[SE] | 0.095 | 0.035 | 0.062 | |
| SSE | 21.242 | 13.022 | 34.264 | |
| Accuracy (number of correct) | 61.00 (61) | 89.93 (134) | 78.31 (195) | |
| AUC | 0.868 | |||
| Driver Acceptance Model using Acceptance Sensitivity | E[SE] | 0.134 | 0.090 | 0.108 |
| Var[SE] | 0.034 | 0.018 | 0.025 | |
| SSE | 5.150 | 3.910 | 9.059 | |
| Accuracy (number of correct) | 94.00 (94) | 98.66 (147) | 96.79 (241) | |
| AUC | 0.991 |
| Model Classification | Performance Index | Rejected (Sample Size: 62) | Accepted (Sample Size: 146) | Total (Sample Size: 208) |
|---|---|---|---|---|
| Driver Acceptance Model using Statistical Significance p-value | E[SE] | 0.357 | 0.152 | 0.213 |
| Var[SE] | 0.112 | 0.030 | 0.063 | |
| SSE | 14.845 | 7.803 | 22.648 | |
| Accuracy (number of correct) | 56.45% (35) | 73.29% (107) | 68.27% (142) | |
| AUC | 0.902 | |||
| Driver Acceptance Model using Acceptance Sensitivity | E[SE] | 0.060 | 0.026 | 0.036 |
| Var[SE] | 0.022 | 0.005 | 0.010 | |
| SSE | 1.576 | 0.837 | 2.413 | |
| Accuracy (number of correct) | 98.39% (61) | 100.00% (146) | 99.52% (207) | |
| AUC | 0.995 |
6. Discussion
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Neale, V.L.; Dingus, T.A.; Klauer, S.G.; Sudweeks, J.; Goodman, M. An overview of the 100-car naturalistic study and findings. In Proceedings of the 19th International Technical Conference Enhanced Safety Vehicles, Washington, DC, USA, 6–9 June 2005. [Google Scholar]
- Peden, M.; Scurfield, R.; Sleet, D.; Mohan, A.; Hyder, A.; Jrawan, E. World Report on Road Traffic Injury Prevention; World Health Organization: Geneva, Switzerland; World Bank: Geneva, Switzerland, 2004. [Google Scholar]
- Adell, E. Acceptance of driver support systems. In Proceedings of the European Conference on Human Centered Design for Intelligent Transport Systems, Berlin, Germany, 29–30 April 2010. [Google Scholar]
- Regan, M.; Mitsopoulos, E.; Haworth, N.; Young, K. Acceptability of in-Vehicle Intelligence Tranport Systems to Victorian Car Drivers; Monash University Accident Research Centre: Melbourne, Australia, 2002. [Google Scholar]
- Schade, J.; Baum, M. Reactance or acceptance? Reactions towards the introduction of road pricing. Transp. Res. Part A Policy Pract. 2007, 41, 41–48. [Google Scholar] [CrossRef]
- Van Der Laan, J.D.; Heino, A.; De Waard, D. A simple procedure for the assessment of acceptance of advanced transport telematics. Transp. Res. Part C Emerg. Technol. 1997, 5, 1–10. [Google Scholar]
- Venkatesh, V.; Morris, M.G. Why don’t men ever stop to ask for directions? Gender, social influence, and their role in technology acceptance and usage behavior. MIS Q. 2000, 24, 115–139. [Google Scholar] [CrossRef]
- Risser, R.; Lehner, U. Acceptability of speeds and speed limits to drivers and pedestrians. In Proceedings of the 9th International Conference on Road Safety in Europe, Bergisch Gladbach, Germany, 21–23 September 1998. [Google Scholar]
- Adell, E.; Varhelyi, A. Driver comprehension and acceptance of the active accelerator pedal after long-term use. Transp. Res. Part F Traffic Psychol. Behav. 2008, 11, 37–51. [Google Scholar] [CrossRef]
- Nishiwaki, Y.; Miyajima, C.; Kitaoka, N.; Terashima, R.; Wakita, T.; Takeda, K. Generating lane-change trajectories of individual drivers. In Proceedings of the IEEE International Conference on Vehicular Electronics and Safety, Columbus, OH, USA, 22–24 September 2008. [Google Scholar]
- Yao, W.; Zhao, H.; Bonnifait, P.; Zha, H. Lane change trajectory prediction by using recorded human driving data. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Gold Coast, QLD, Australia, 23–26 June 2013. [Google Scholar]
- Butakov, V.A.; Ioannou, P. Personalized driver/vehicle lane change models for ADAS. IEEE Trans. Veh. Technol. 2015, 64, 4422–4431. [Google Scholar] [CrossRef]
- Gindele, T.; Brechtel, S.; Dillmann, R. Learning driver behavior models from traffic observations for decision making and planning. IEEE Intell. Transp. Syst. Mag. 2015, 7, 69–79. [Google Scholar] [CrossRef]
- Nobukawa, K.; Bao, S.; LeBlanc, D.J.; Zhao, D.; Peng, H.; Pan, C.S. Gap Acceptance During Lane Changes by Large-Truck Drivers—An Image-Based Analysis. IEEE Trans. Intell. Transp. Syst. 2016, 17, 772–781. [Google Scholar] [CrossRef] [PubMed]
- Chulwoo, M.; Youngseok, L.; Jeong, C.-H.; Seibum, C. Investigation of objective parameters for acceptance evaluation of automatic lane change system. Int. J. Automot. Technol. 2018, 19, 179–190. [Google Scholar]
- Najm, W.G.; Stearns, M.D.; Howarth, H.; Koopmann, J.; Hitz, J. Evaluation of an Automotive Rear-End Collision Avoidance System (Chapter 5); US Department of Transportation, National Highway Traffic Safety Administration; Report no. DOT HS 810 569; Research and Innovative Technology Administration, Volpe National Transportation Systems Centre: Cambridge, MA, USA, 2006. [Google Scholar]
- Van Driel, C. Driver Support in Congestion—An Assessment of User Needs and Impacts on Driver and Traffic Flow. Ph.D. Thesis, TRAIL Research School, Delft, The Netherlands, 2007. [Google Scholar]
- Risser, R.; Almqvist, S.; Ericsson, M. Fördjupade Analyser av Acceptansfrågor Kring Dynamisk Hastighetsanpassning; Bulletin 174; Lund University: Lund, Sweden, 1999. [Google Scholar]
- Nielsen, J. Usability Engineering; Academic Press: San Diego, CA, USA, 1993. [Google Scholar]
- Chismar, W.G.; Wiley-Patton, S. Does the Extended Technology Acceptance Model Apply to Physicians. In Proceedings of the 36th Hawaii International Conference on System Sciences (HICSS’03), Big Island, HI, USA, 6–9 January 2003. [Google Scholar]
- Dillon, A.; Morris, M. User acceptance of new information technology—Theories and models. Annu. Rev. Inf. Sci. Technol. 1996, 14, 3–32. [Google Scholar]
- Boff, K.R.; Kaufman, L.; Thomas, J.P. Handbook of Perception and Human Performance, Cognitive Processes and Performance; John Wiley: New York, NY, USA, 1986; Volume 2. [Google Scholar]
- De Warrd, D. The Measurement of Drivers’ Mental Workload. Ph.D. Thesis, University of Groningen, Traffic Research Centre, Haren, The Netherlands, 1996. [Google Scholar]
- Parasurman, R.; Davies, D.R. Varieties of Attention; Academic Press Series in Cognition and Perception; Academic Press: Cambridge, MA, USA, 1984. [Google Scholar]
- Damos, D.L. Multiple-Task Performance; Taylor & Francis: London, UK, 1991. [Google Scholar]
- Pregibon, D. Data analytic methods for matched case-control studies. Biometrics 1984, 40, 639–651. [Google Scholar] [CrossRef] [PubMed]
- Hosmer, D.W.; Lemeshow, S.; Sturdivant, R.X. Applied Logistic Regression, 3rd ed.; John Wiley Inc.: New York, NY, USA, 2013. [Google Scholar]
- Rao, C.R. Linear Statistical Inference and Its Application, 2nd ed.; Wiley Inc.: New York, NY, USA, 1973. [Google Scholar]
- Fawcett, T. An introduction to ROC analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]

| Parameter | Unit | Descriptive Statistics | Significance Test (1) | Acceptance Sensitivity (%) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Accepted | Rejected | ||||||||
| E[X] | Var[X] | E[Y] | Var[Y] | t | p-Value | ||||
| standard deviation | % | 7.400 | 30.410 | 9.954 | 14.011 | 1.497 | 0.141 | 34.525 | |
| minimum | ° | 0.535 | 1.824 | 0.994 | 1.977 | 1.020 | 0.313 | 85.787 | |
| median | °/s | 0.001 | 0.000 | 0.000 | 0.000 | −0.614 | 0.542 | 63.324 | |
| Parameter | Unit | Descriptive Statistics | Significance Test (1) | Acceptance Sensitivity (%) | |||||
|---|---|---|---|---|---|---|---|---|---|
| Accepted | Rejected | ||||||||
| E[X] | Var[X] | E[Y] | Var[Y] | t | p-Value | ||||
| minimum | m/s | 28.287 | 10.367 | 25.632 | 10.689 | −2.489 * | 0.016 | 9.387 | |
| maximum | m/s | 30.028 | 9.872 | 27.454 | 10.492 | −2.465 * | 0.017 | 8.574 | |
| median | m/s | 29.138 | 9.619 | 26.667 | 11.711 | −2.356 * | 0.023 | 8.478 | |
| mean | m/s | 29.148 | 9.756 | 26.606 | 11.144 | −2.428 * | 0.019 | 8.723 | |
| minimum | m/s2 | 0.164 | 0.057 | −0.195 | 0.115 | −4.100 *** | 0.000 | 18.831 | |
| maximum | m/s2 | 0.559 | 0.068 | 0.300 | 0.161 | −2.642 * | 0.011 | 46.399 | |
| median | m/s2 | 0.391 | 0.060 | 0.022 | 0.225 | −3.584 *** | 0.001 | 94.391 | |
| mean | m/s2 | 0.384 | 0.054 | −0.051 | 0.366 | −3.743 *** | 0.000 | 86.642 | |
| standard deviation | m/s2 | 0.114 | 0.005 | 0.168 | 0.004 | 2.439 * | 0.018 | 47.525 | |
| minimum | m/s3 | −0.476 | 0.097 | −0.688 | 0.122 | −2.001 | 0.051 | 44.520 | |
| maximum | m/s3 | 0.525 | 0.228 | 0.687 | 0.238 | 1.020 | 0.313 | 30.748 | |
| median | m/s3 | −0.001 | 0.008 | −0.063 | 0.015 | −1.948 | 0.057 | 10,964.7 | |
| mean | m/s3 | 0.009 | 0.010 | −0.054 | 0.017 | −1.807 | 0.077 | 492.66 | |
| standard deviation | m/s3 | 0.001 | 0.000 | 0.002 | 0.000 | 1.570 | 0.123 | 207.065 | |
| minimum | °/s | 0.003 | 0.000 | 0.006 | 0.000 | 1.213 | 0.231 | 92.947 | |
| median | °/s | 0.015 | 0.000 | 0.021 | 0.000 | 1.470 | 0.148 | 46.190 | |
| mean | °/s | 0.015 | 0.000 | 0.021 | 0.000 | 1.365 | 0.179 | 36.238 | |
| minimum | ° | 0.976 | 2.052 | 0.603 | 0.844 | −0.847 | 0.401 | 38.249 | |
| standard deviation | ° | 0.443 | 0.065 | 0.629 | 0.367 | 1.550 | 0.128 | 42.135 | |
| minimum | °/s | 0.003 | 0.000 | 0.001 | 0.000 | −0.787 | 0.435 | 46.556 | |
| Statistical Significance p-Value | |||||||
|---|---|---|---|---|---|---|---|
| −0.206 | −0.013 | ||||||
| −0.839 | −669.777 | ||||||
| −3.960 | −2.214 | ||||||
| 5.243 | −1.374 | ||||||
| −7.263 | 14.199 | ||||||
| 5.274 | −3.881 | ||||||
| 5.189 | −20.073 | ||||||
| 0.233 | 0.148 | ||||||
| −19.741 | 5.142 | ||||||
| 0.103 | 30.755 | ||||||
| −0.142 | −26.580 | ||||||
| −6.663 | −1263.746 | ||||||
| −127.343 | |||||||
| −452.133 | |||||||
| 569.911 | |||||||
| 1.046 | |||||||
| −2.377 | |||||||
| −148.541 | |||||||
| −0.012 | |||||||
| −0.179 | |||||||
| −0.730 | |||||||
| −0.456 | |||||||
| −0.901 | |||||||
| −0.103 | |||||||
| −0.174 | |||||||
| 0.707 | |||||||
| −1.151 | |||||||
| −0.156 | |||||||
| 1.085 | |||||||
| 0.028 | |||||||
| −0.165 | |||||||
| 0.604 | |||||||
| 0.188 | |||||||
| −0.175 | |||||||
| 0.087 | |||||||
| 0.271 | |||||||
| −0.283 | |||||||
| 0.139 | |||||||
| 309 | |||||||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moon, C. An Objective Evaluation Method for Driver/Passenger Acceptance of an Autonomous Driving System for Lane Changes. Appl. Sci. 2023, 13, 9601. https://doi.org/10.3390/app13179601
Moon C. An Objective Evaluation Method for Driver/Passenger Acceptance of an Autonomous Driving System for Lane Changes. Applied Sciences. 2023; 13(17):9601. https://doi.org/10.3390/app13179601
Chicago/Turabian StyleMoon, Chulwoo. 2023. "An Objective Evaluation Method for Driver/Passenger Acceptance of an Autonomous Driving System for Lane Changes" Applied Sciences 13, no. 17: 9601. https://doi.org/10.3390/app13179601
APA StyleMoon, C. (2023). An Objective Evaluation Method for Driver/Passenger Acceptance of an Autonomous Driving System for Lane Changes. Applied Sciences, 13(17), 9601. https://doi.org/10.3390/app13179601