
Analysis of Carbon Emissions in Heterogeneous Traffic Flow within the Influence Area of Highway Off-Ramps

Abstract
:1. Introduction
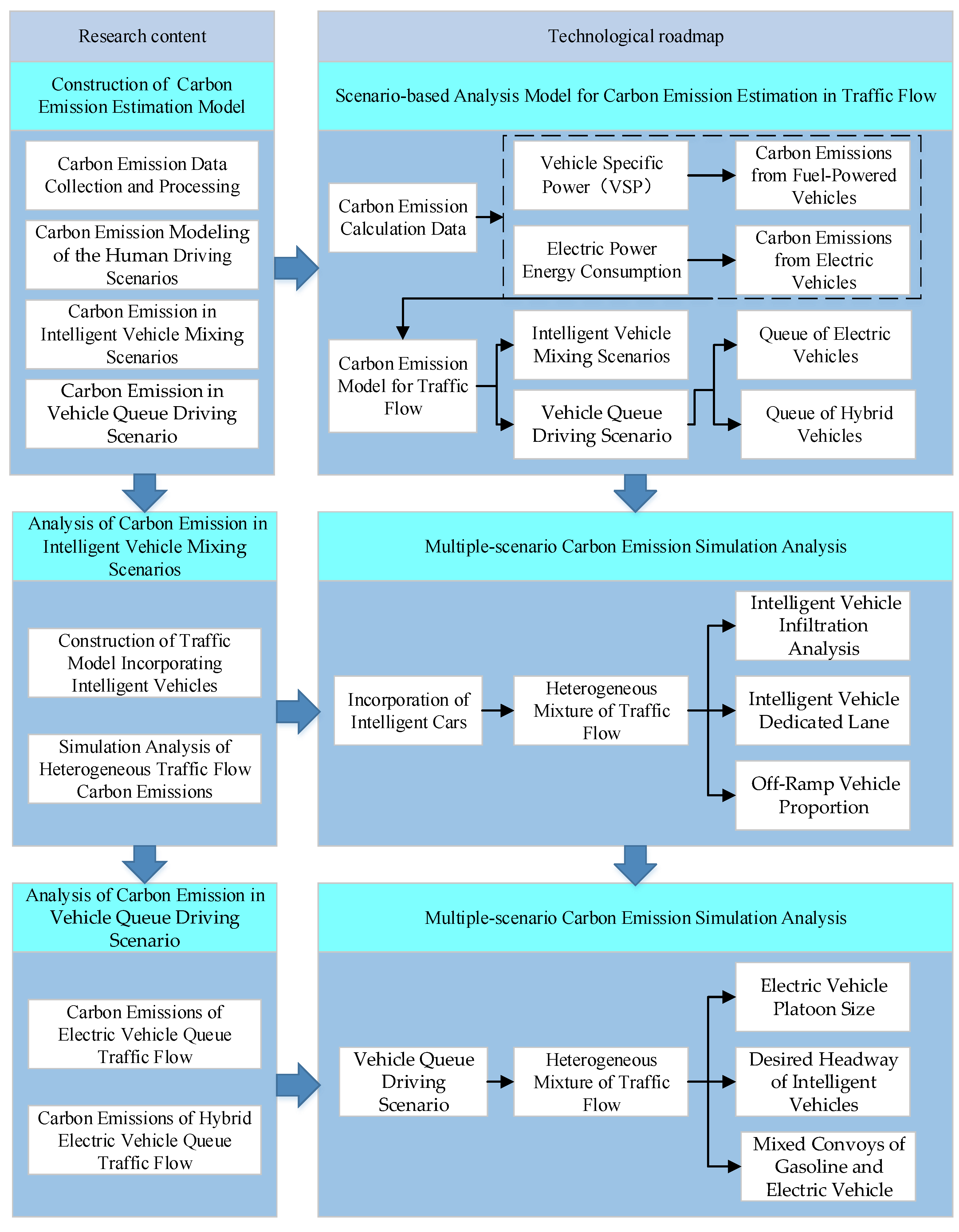
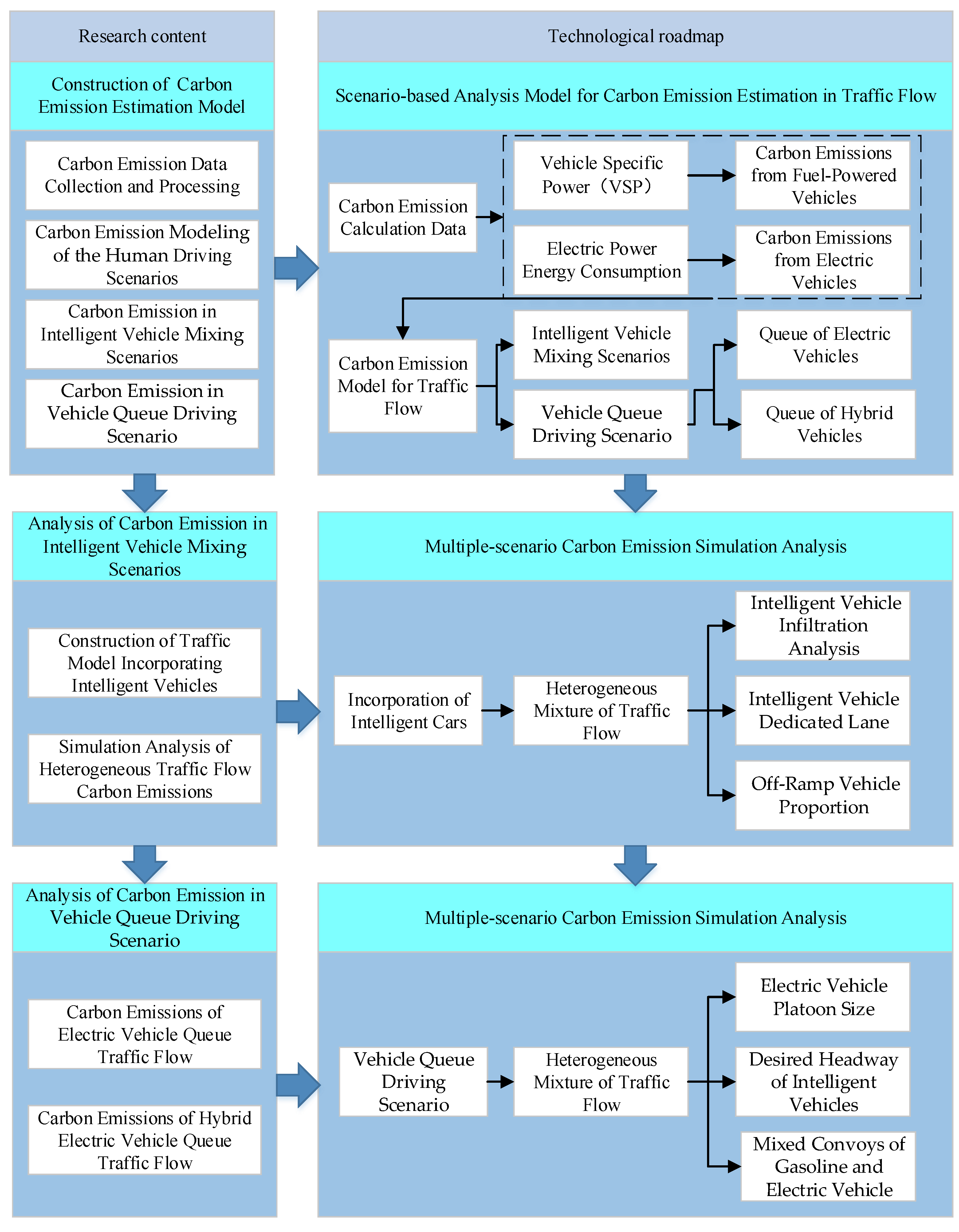
2. Materials and Methods
2.1. Carbon Emission Modeling of the Human Driving Scenarios
2.1.1. Carbon Emission Calculation Model of Fuel Vehicles
2.1.2. Carbon Emission Calculation Model of Electric Vehicle
2.2. Carbon Emission Modeling of the Intelligent Vehicle Mixing Scenario
2.2.1. Carbon Emission Calculation Model of Traffic Flow Based on Intelligent Vehicles
2.2.2. Carbon Emission Calculation Model of Heterogeneous Traffic Flow
- Carbon emission measurements of intelligent vehicle dedicated lane.
- 2.
- Calculation of carbon emissions based on the proportion of vehicles at off-ramps
2.3. Carbon Emission Modeling of the Vehicle Queue Driving Scenario
2.3.1. Carbon Emissions of Traffic Flow under Electric Vehicle Queue
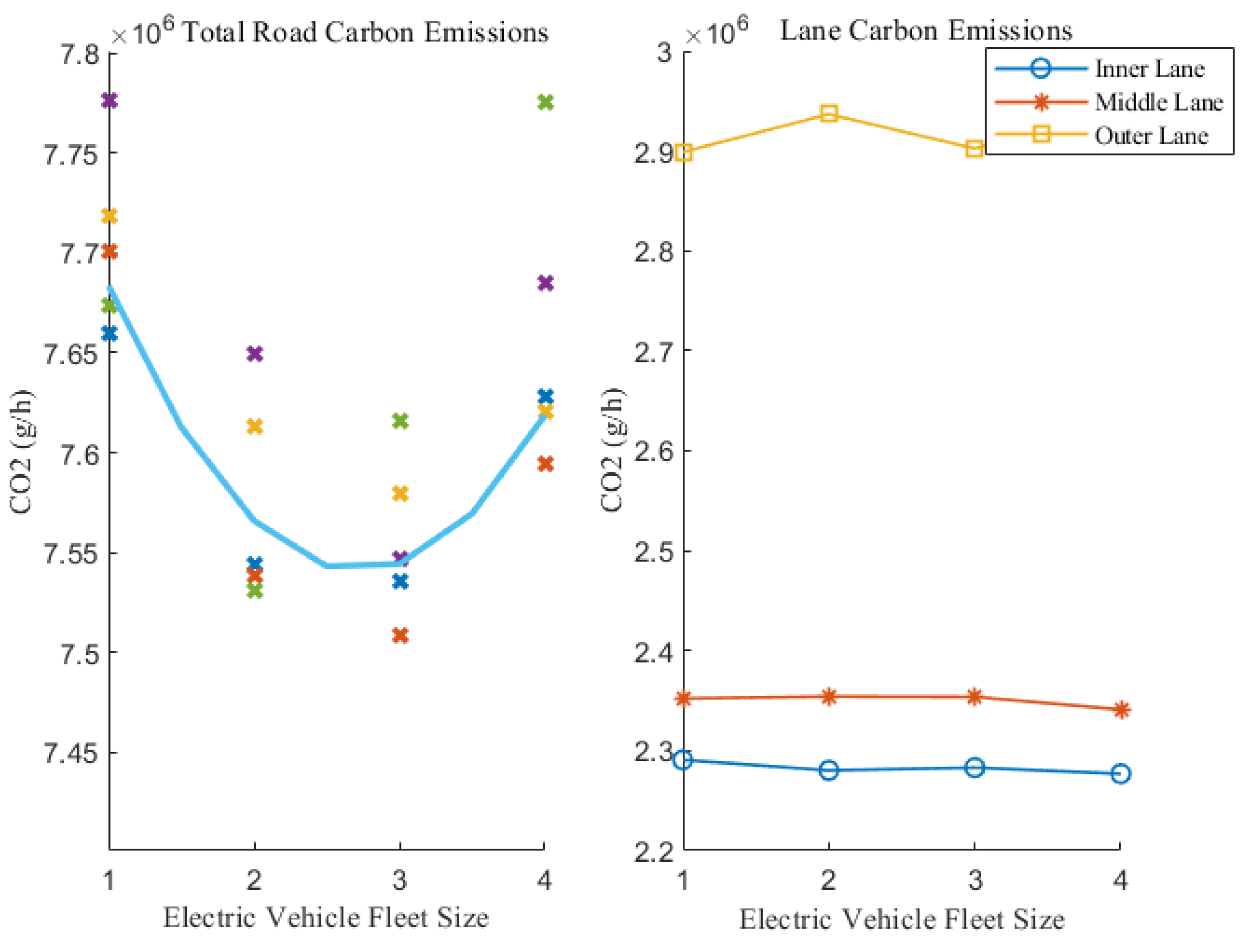
- Carbon emissions based on the size of the electric fleet
- 2.
- The carbon emissions based on the expected front time distance of the intelligent vehicle
2.3.2. Carbon Emissions of Traffic Flow under Mixed Queue of Fuel and Electric Fleet
- The carbon emission calculation is based on the proportion of fuel vehicles in the fleet
- 2.
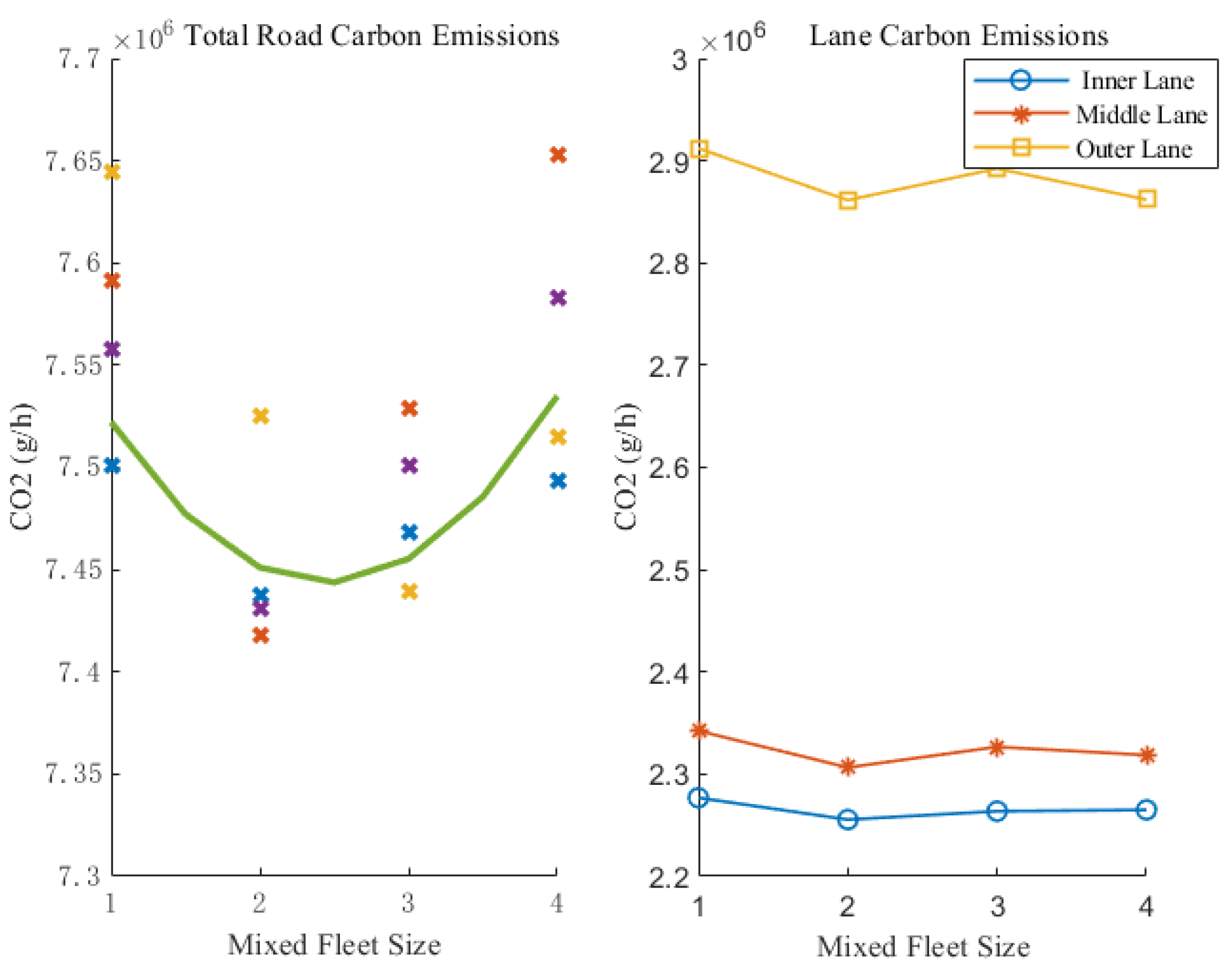
- Carbon emission measurement based on mixed fleet size
2.4. Data Collection and Traffic Flow Modeling Parameter Calibration
2.4.1. Traffic and Carbon Emissions Data Collection
2.4.2. Parameter Calibration
- Car-Following Models
- Manual Car-Following Model
- Autonomous Car-Following Model
- 2.
- Lane Change Model
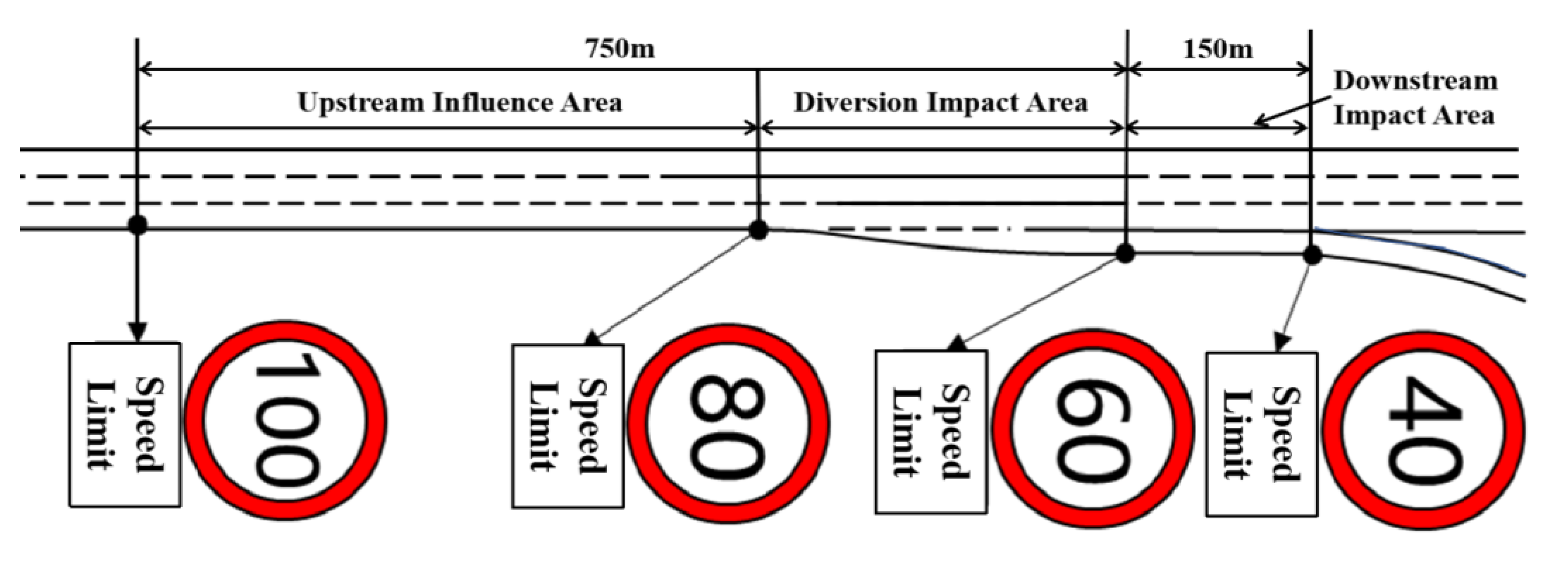
2.5. Simulation Experiment Scenarios
2.5.1. Simulation Scenario
2.5.2. Simulation Design
3. Results
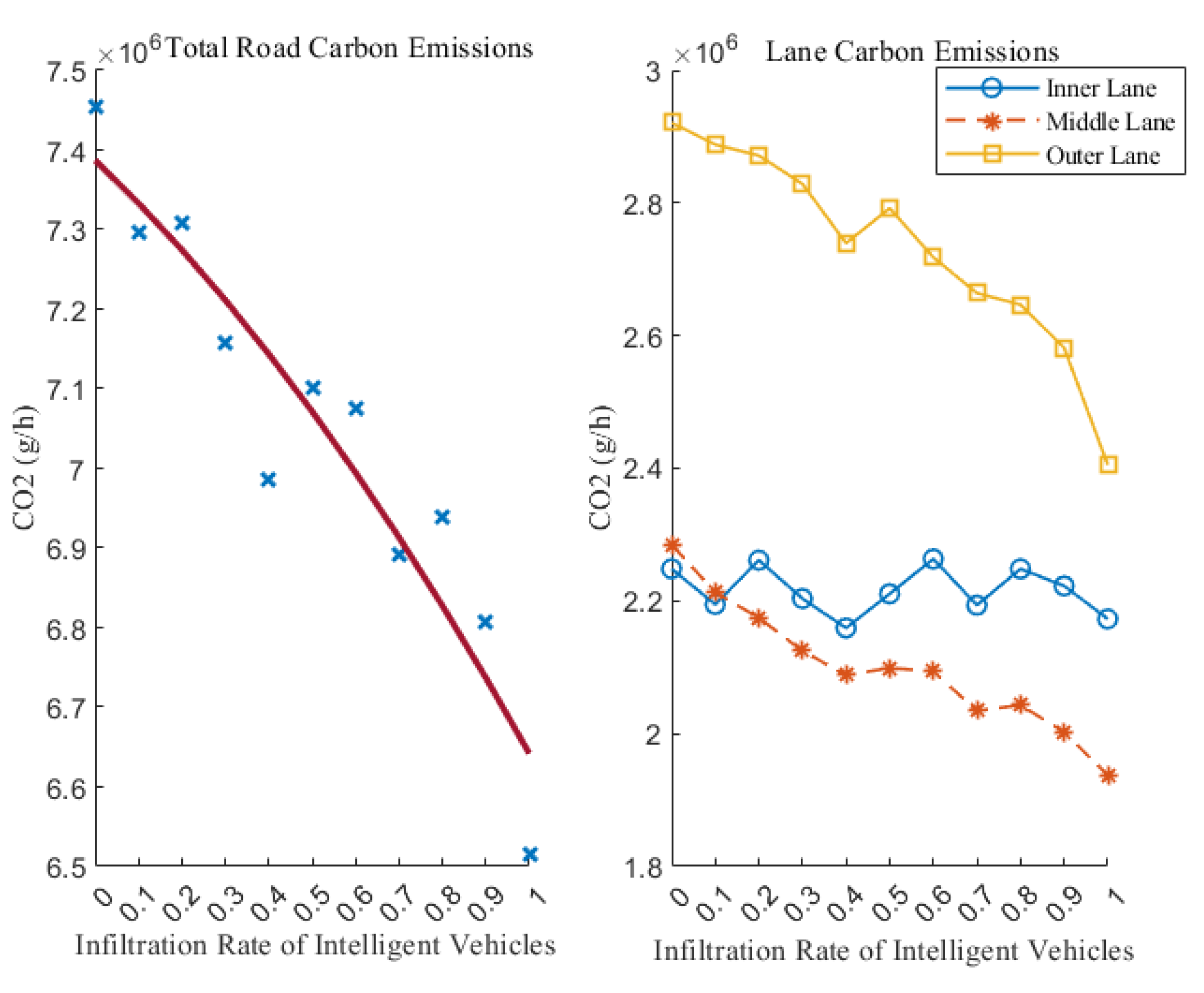
3.1. Intelligent Vehicle Infiltration Scenario Experiment
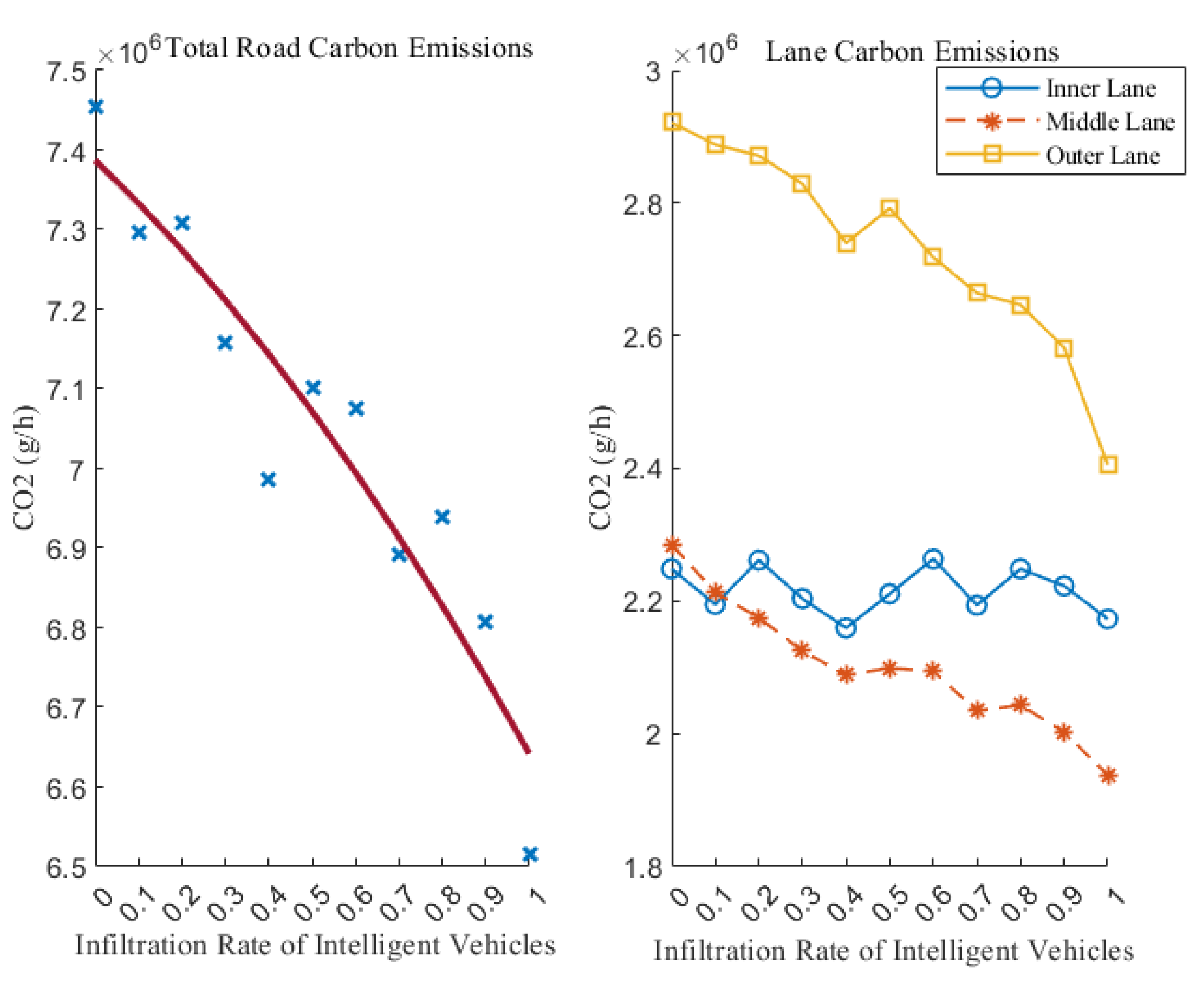
3.1.1. Intelligent Vehicle Infiltration Analysis
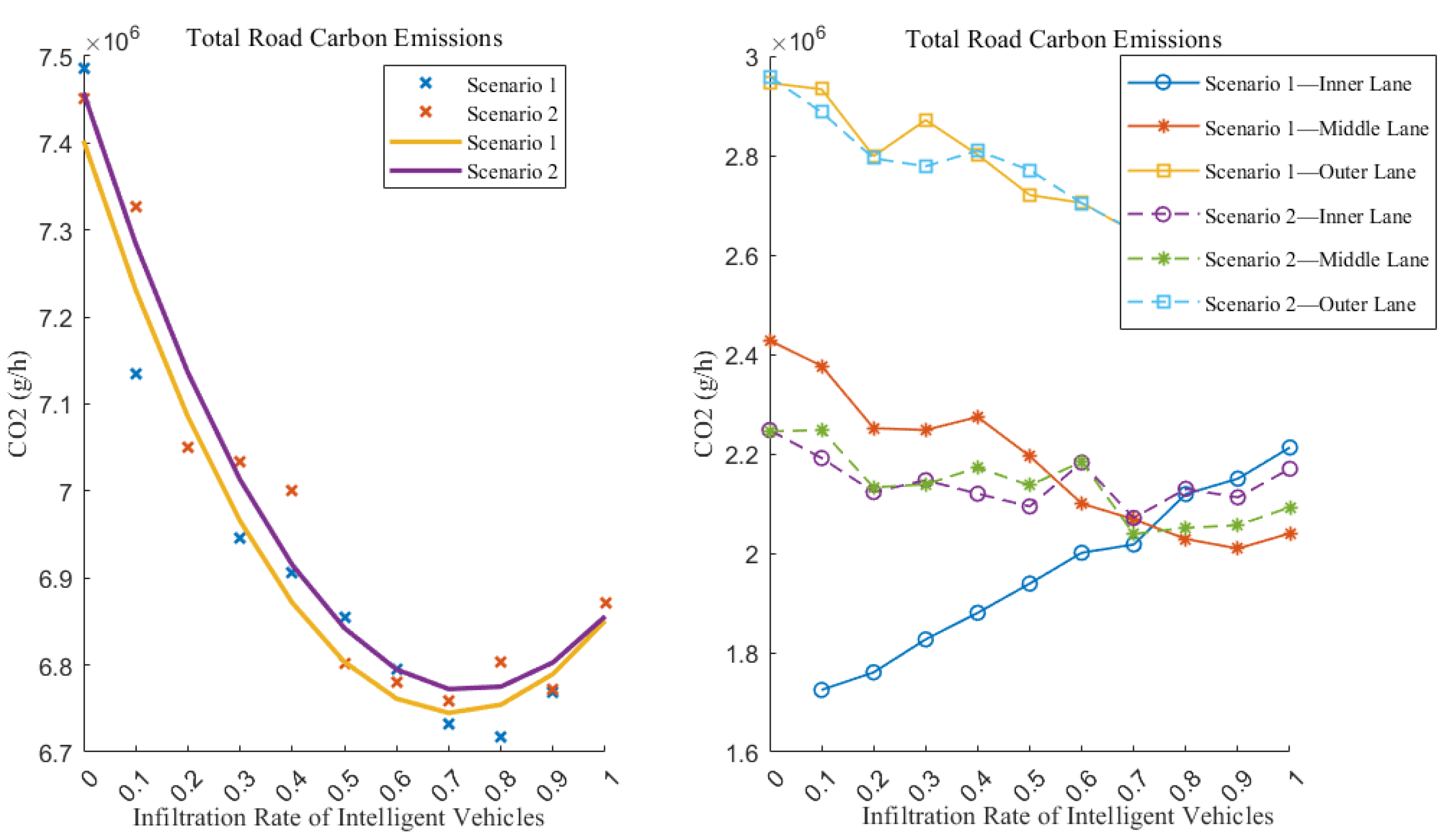
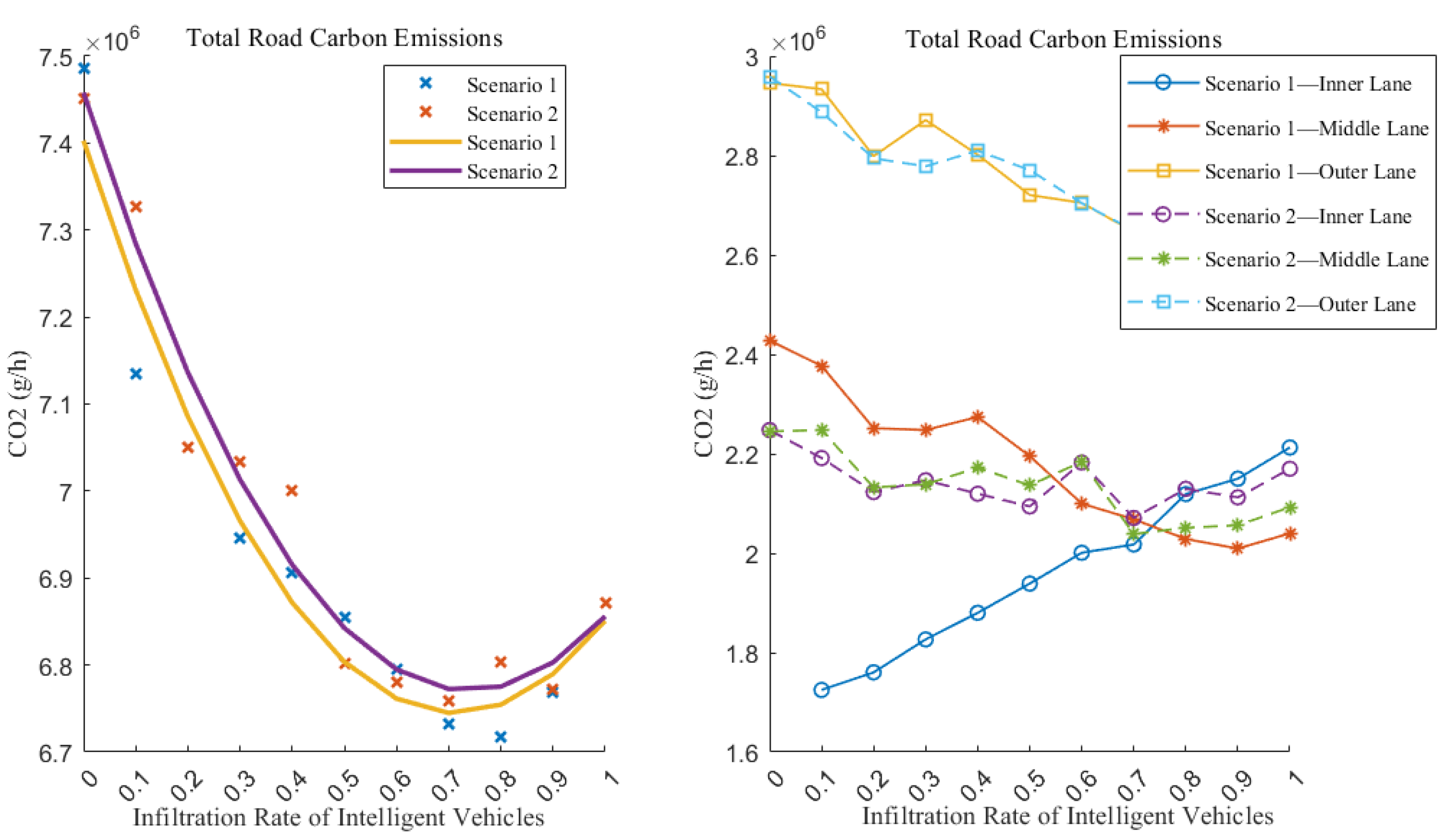
3.1.2. Intelligent Vehicle Dedicated Lane
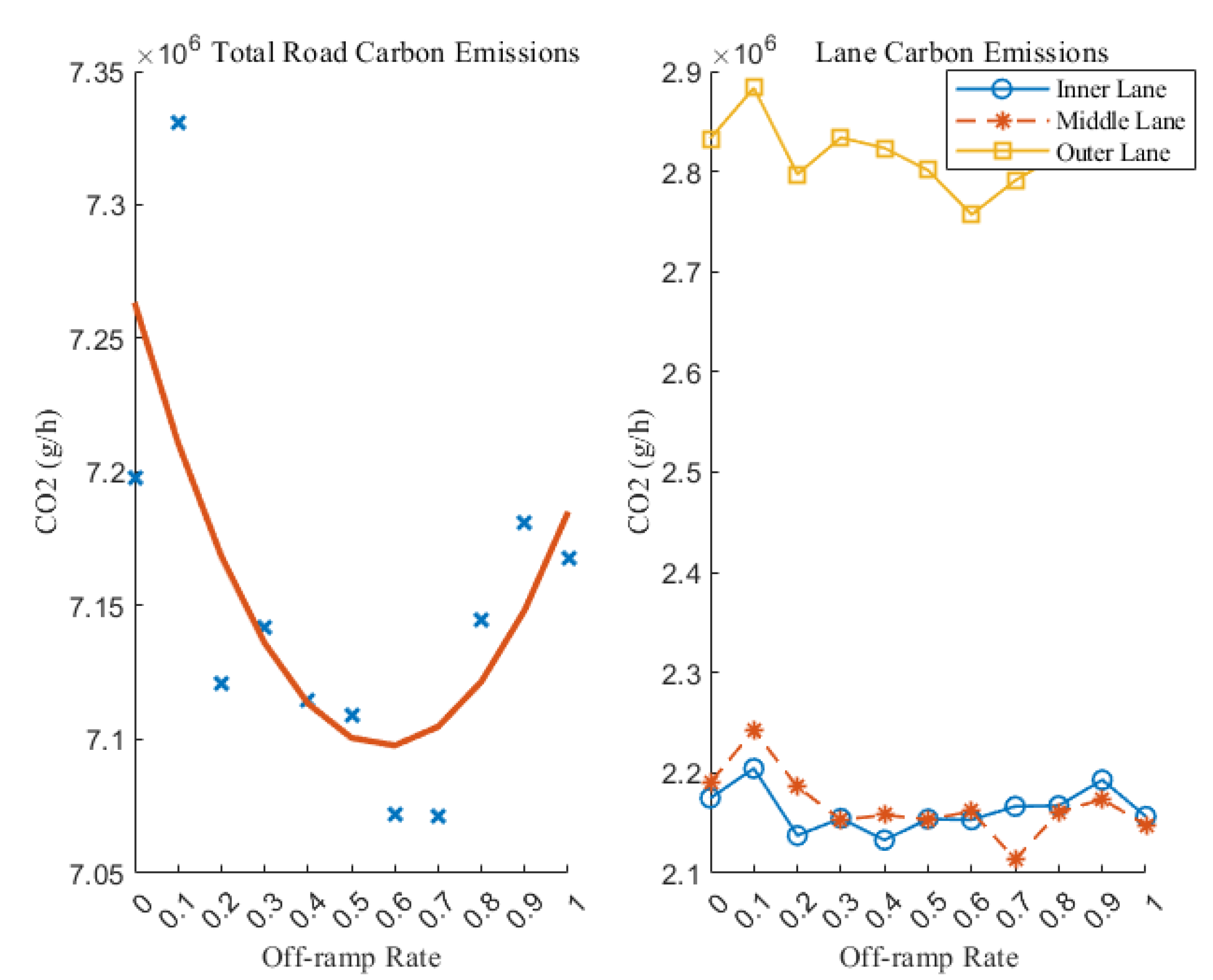
3.1.3. Off-Ramp Vehicle Proportion
3.2. Intelligent Vehicle Platoons Scenario Experiment
3.2.1. Electric Vehicle Platoon Size
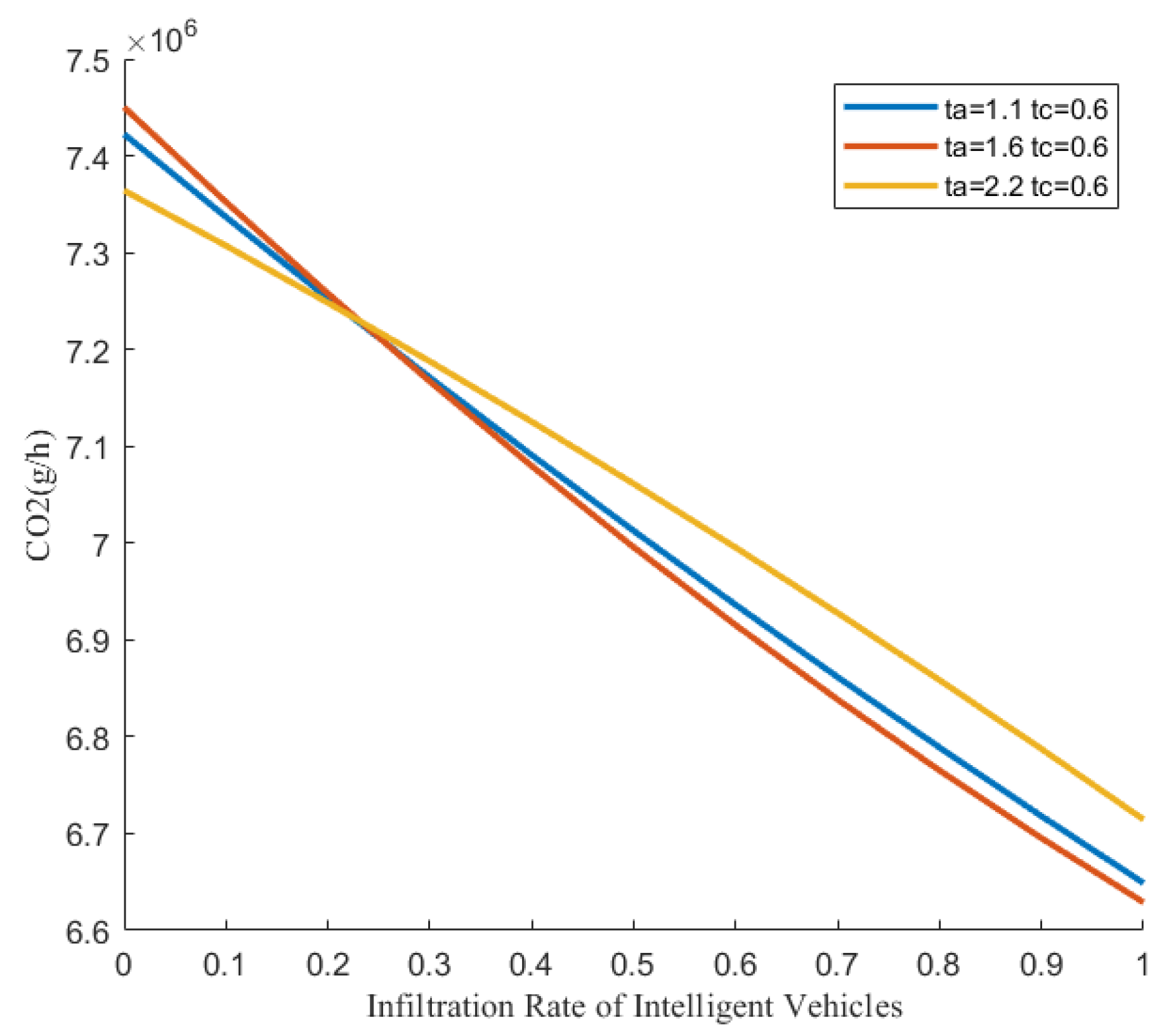
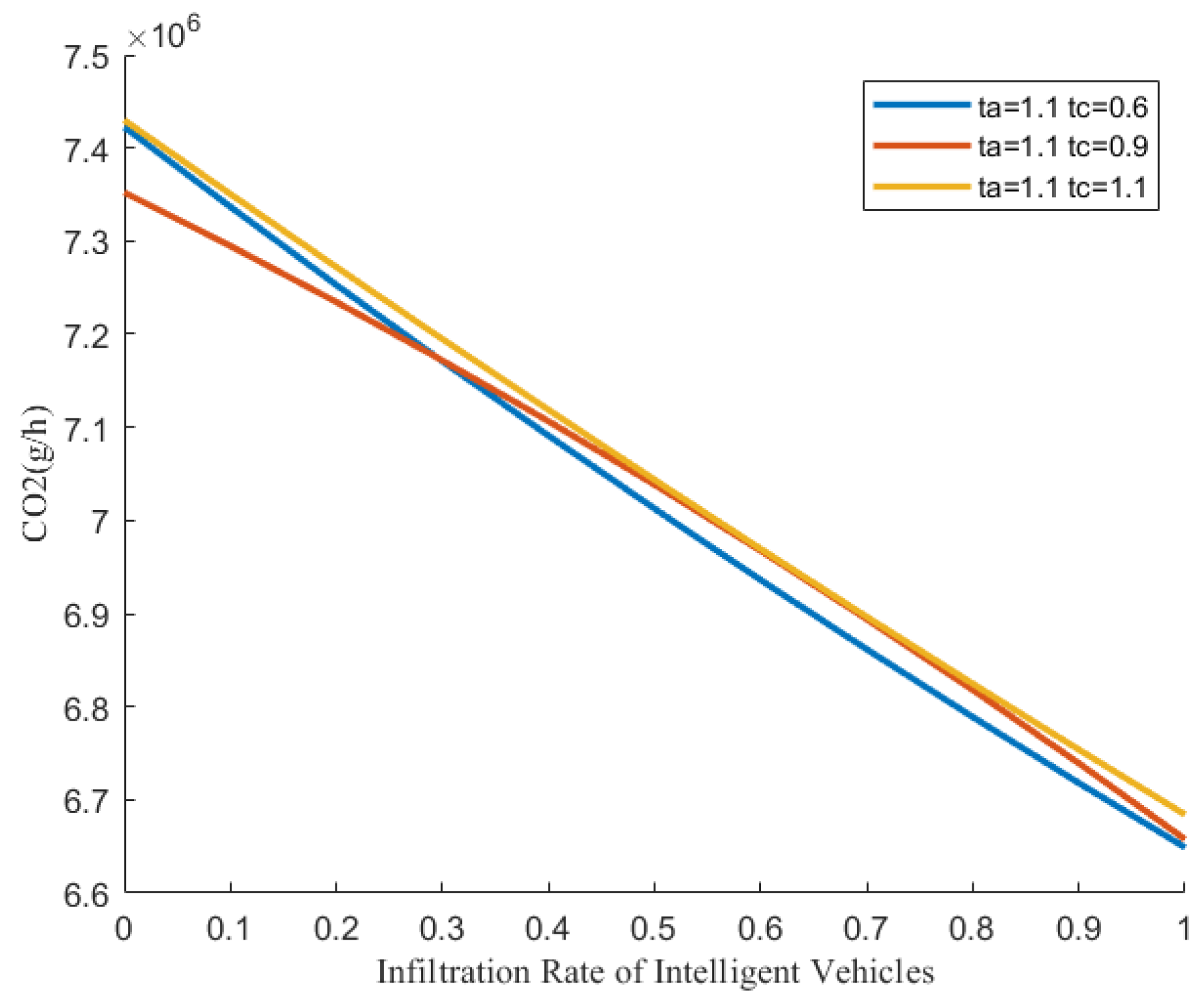
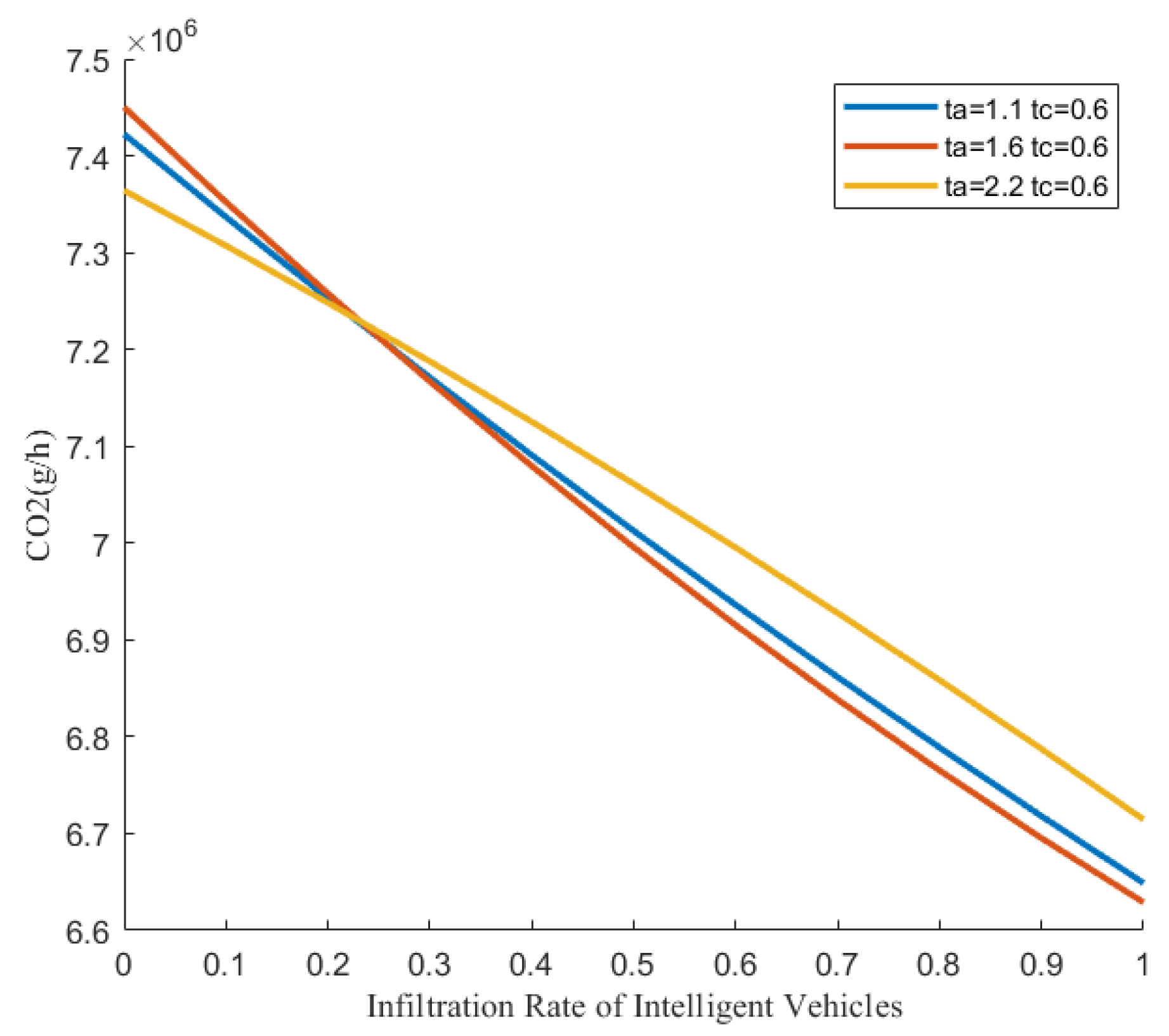
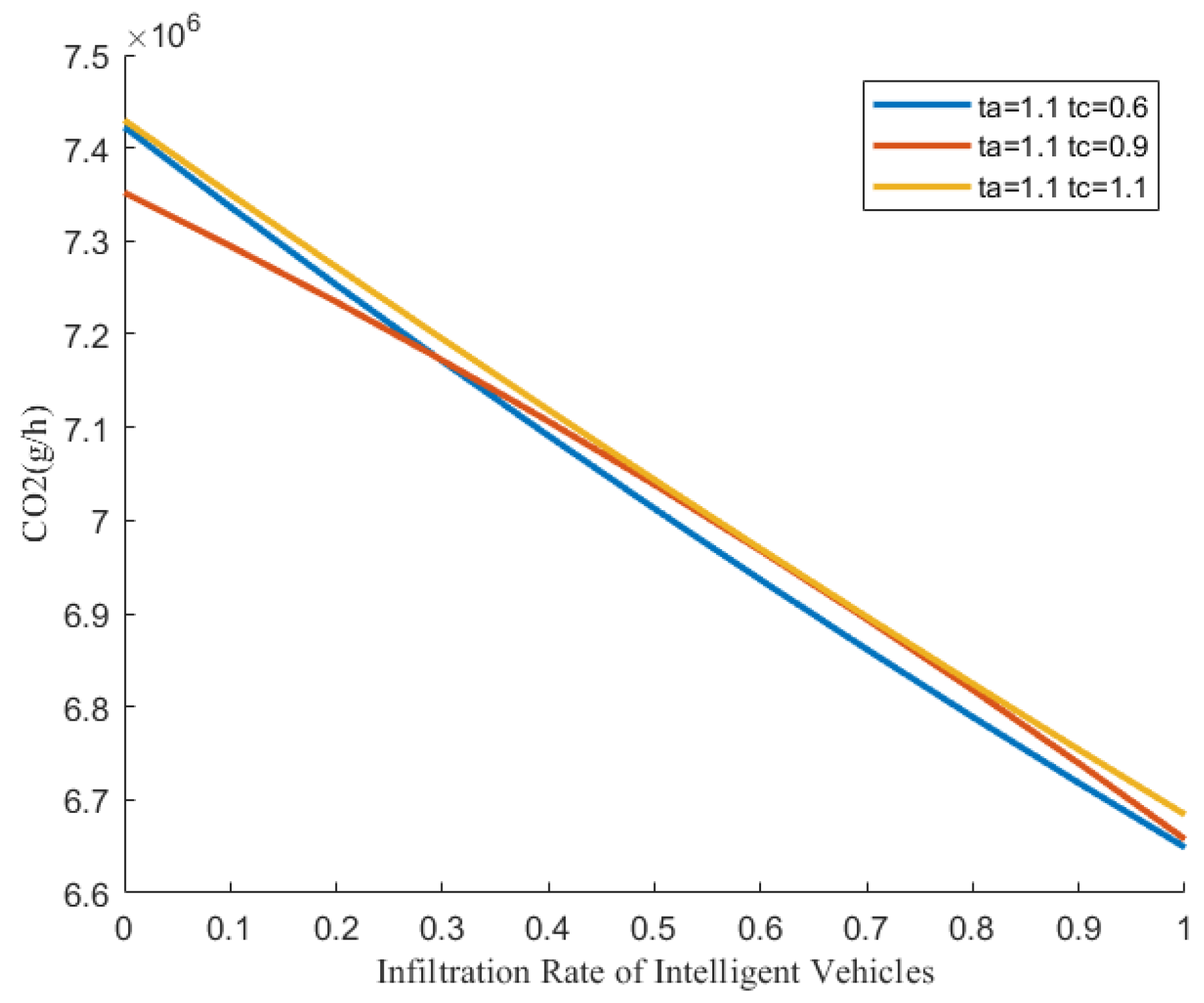
3.2.2. Desired Headway of Intelligent Vehicles
- Impact of desired headway of ACC vehicles on traffic flow carbon emissions.
- 2.
- Impact of desired headway of CACC vehicles on traffic flow carbon emissions.
3.2.3. Mixed Convoys of Gasoline and Electric Vehicle
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, L.; Long, R.; Chen, H.; Geng, J. A review of China’s road traffic carbon emissions. J. Clean. Prod. 2019, 207, 569–581. [Google Scholar] [CrossRef]
- Talebpour, A.; Mahmassani, H.S. Influence of connected and autonomous vehicles on traffic flow stability and throughput. Transp. Res. Part C Emerg. Technol. 2016, 71, 143–163. [Google Scholar] [CrossRef]
- Rios-Torres, J.; Malikopoulos, A.A. A survey on the coordination of connected and automated vehicles at intersections and merging at highway on-ramps. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1066–1077. [Google Scholar] [CrossRef]
- Yao, Z.; Wang, Y.; Liu, B.; Zhao, B.; Jiang, Y. Fuel consumption and transportation emissions evaluation of mixed traffic flow with connected automated vehicles and human-driven vehicles on expressway. Energy 2021, 230, 120766. [Google Scholar] [CrossRef]
- Xiao, L.; Gao, F. Practical string stability of platoon of adaptive cruise control vehicles. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1184–1194. [Google Scholar] [CrossRef]
- Zheng, S.; Li, H.; Huang, Z.; Li, K.; Qin, L. Flow-balanced-based collaborative strategies and simulation of vehicle group behaviors for on-ramp areas. Simul. Model. Pract. Theory 2020, 103, 102093. [Google Scholar] [CrossRef]
- Golob, T.F.; Recker, W.W.; Alvarez, V.M. Safety aspects of freeway weaving sections. Transp. Res. Part A Policy Pract. 2004, 38, 35–51. [Google Scholar] [CrossRef]
- Zheng, Y.; Ran, B.; Qu, X.; Zhang, J.; Lin, Y. Cooperative lane changing strategies to improve traffic operation and safety nearby freeway off-ramps in a connected and automated vehicles environment. IEEE Trans. Intell. Transp. Syst. 2020, 21, 4605–4614. [Google Scholar] [CrossRef]
- Yang, K. The Effects of Safety Deceleration Rule in Traffic System. Appl. Mech. Mater. 2014, 496, 3013–3016. [Google Scholar] [CrossRef]
- Hancock, M.W.; Wright, B. A Policy on Geometric Design of Highways and Streets; American Association of State Highway and Transportation Officials: Washington, DC, USA, 2013. [Google Scholar]
- Gong, J.; Guo, X.; Dai, S.; Duan, L. Research on the Operational Characteristics of Diverging Area on Expressway Off-ramp based on Different Restricted Strategy of Lane. Procedia Soc. Behav. Sci. 2013, 96, 1156–1164. [Google Scholar] [CrossRef]
- Davis, L.C. Effect of adaptive cruise control systems on traffic flow. Phys. Rev. E 2004, 69, 066110. [Google Scholar] [CrossRef] [PubMed]
- Schleicher, S.; Gelau, C. The influence of Cruise Control and Adaptive Cruise Control on driving behaviour—A driving simulator study. Accid. Anal. Prev. 2011, 43, 1134–1139. [Google Scholar] [CrossRef]
- Davis, L.C. Stability of adaptive cruise control systems taking account of vehicle response time and delay. Phys. Lett. A 2012, 376, 2658–2662. [Google Scholar] [CrossRef]
- Siebert, F.W.; Oehl, M.; Pfister, H.R. The influence of time headway on subjective driver states in adaptive cruise control. Transp. Res. Part F Traffic Psychol. Behav. 2014, 25, 65–73. [Google Scholar] [CrossRef]
- Milanés, V.; Shladover, S.E.; Spring, J.; Nowakowski, C.; Kawazoe, H.; Nakamura, M. Cooperative adaptive cruise control in real traffic situations. IEEE Trans. Intell. Transp. Syst. 2013, 15, 296–305. [Google Scholar] [CrossRef]
- Rupp, A.; Stolz, M.; Horn, M. Decentralized cooperative merging using sliding mode control. IFAC Pap. Online 2018, 51, 349–354. [Google Scholar] [CrossRef]
- Treiber, M.; Hennecke, A.; Helbing, D. Congested traffic states in empirical observations and microscopic simulations. Phys. Rev. E 2000, 62, 1805. [Google Scholar] [CrossRef]
- Alam, A.; Hatzopoulou, M. Modeling transit bus emissions using MOVES: Comparison of default distributions and embedded drive cycles with local data. Transp. Eng. Part A Syst. 2017, 143, 04017049. [Google Scholar] [CrossRef]
- Farzaneh, M.; Zietsman, J.; Lee, D.-W.; Johnson, J.; Wood, N.; Ramani, T.; Gu, C. Texas-Specific Drive Cycles and Idle Emissions Rates for Using with EPA’s MOVES Model-Final Report; Texas Department of Transportation: Austin, TX, USA, 2014.
- Yuxi, Z.; Zongtao, D.; Yishui, Z.H.U.; Wang, L.; Zhou, Y.; Guo, Y. Survey of Fuel Consumption Model for Motor Vehicle. J. Comput. Eng. Appl. 2021, 57, 14–26. [Google Scholar]
- Chaudhari, A.R.; Thring, R.H. Energy economy analysis of the G-Wiz: A two-year case study based on two vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2011, 225, 1505–1517. [Google Scholar] [CrossRef]
- Zhang, R.; Yao, E. Electric vehicles’ energy consumption estimation with real driving condition data. Transp. Res. Part D 2015, 41, 177–187. [Google Scholar] [CrossRef]
- Genikomsakis, K.N.; Mitrentsis, G. A computationally efficient simulation model for estimating energy consumption of electric vehicles in the context of route planning applications. Transp. Res. Part D 2017, 50, 98–118. [Google Scholar] [CrossRef]
- Wu, X.; Freese, D.; Cabrera, A.; Kitch, W.A. Electric vehicles’ energy consumption measurement and estimation. Transp. Res. Part D 2015, 34, 52–67. [Google Scholar] [CrossRef]
- Yang, H.; Rakha, H.; Ala, M.V. Eco-cooperative adaptive cruise control at signalized intersections considering queue effects. IEEE Trans. Intell. Transp. Syst. 2016, 18, 1575–1585. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, G.; Hao, P.; Boriboonsomsin, K.; Barth, M. Developing a platoon-wide eco-cooperative adaptive cruise control (CACC) system. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 1256–1261. [Google Scholar] [CrossRef]
- Yao, E.; Wang, M.; Song, Y.; Zhang, Y. Estimating Energy Consumption on the Basis of Microscopic Driving Parameters for Electric Vehicles. Transp. Res. Rec. J. Transp. Res. Board 2014, 2454, 4–91. [Google Scholar] [CrossRef]
- Yuan, L. Analysis of the economy and sensitivity of the energy consumption of pure electric buses. Mech. Eng. Des. 2013, 2, 1–7. [Google Scholar]
- Shladover, S.E.; Su, D.Y.; Lu, X.Y. Impacts of cooperative adaptive cruise control on freeway traffic flow. Transp. Res. Rec. 2012, 2324, 63–70. [Google Scholar] [CrossRef]
- Shladover, S.E.; Nowakowski, C.; Lu, X.Y.; Ferlis, R. Cooperative adaptive cruise control: Definitions and operating concepts. Transp. Res. Rec. 2015, 2489, 145–152. [Google Scholar] [CrossRef]
- Liu, H.; Kan, X.D.; Shladover, S.E.; Lu, X.-Y.; Ferlis, R.E. Modeling impacts of cooperative adaptive cruise control on mixed traffic flow in multi-lane freeway facilities. Transp. Res. Part C Emerg. Technol. 2018, 95, 261–279. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modeling Approach | Classical Model | Applicable Scenarios | Core Concept |
|---|---|---|---|
| Based on Average Velocity | MOBILE Model | Country, Regional, and Macro-Level Energy Consumption and Emission Calculations | Dividing vehicle types into 28 categories to predict future vehicular emission factors. |
| COPERT Model | based on regional sales statistics of automotive fuels. | ||
| EMFAC Model | Calculation principles similar to the MOBILE model | ||
| Based on Driving Conditions | MOVES Model | Micro/Meso-Level Energy Consumption and Emission Analysis Applicable to Road Segments, Intersections, etc. | Establishing the relationship between vehicular emissions and second-by-second vehicle operating conditions based on Vehicle-Specific Power (VSP) |
| IVE Model | Using the ES-VSP to categorize vehicular operating conditions into 60 types | ||
| CMEM Model | Segmenting vehicular emission data based on extensive testing under various operating conditions | ||
| / | V-T micro | Fuel Consumption and Traffic Emissions Analysis for Individual Vehicles | The primary traffic parameters are vehicle speed and acceleration |
| / | METANET Model | Mesoscopic-Level | Utilizing a second-order relationship model between traffic flow parameters |
| Loss Source | Ullage |
|---|---|
| Power grid loss | 8% |
| Loss of power plant itself | The power consumption of 300 MW unit is about 5%, which is calculated as 5% |
| Charging loss | 4% |
| Vehicle Off-Ramp Occupancy | The Carbon Emissions Produced per Hour |
|---|---|
| 0.1 | 7.20 × 103 g |
| 0.2 | 7.13 ×103 g |
| 0.3 | 7.12 × 103 g |
| 0.4 | 7.11 × 103 g |
| 0.5 | 7.10 × 103 g |
| 0.6 | 7.09 × 103 g |
| 0.7 | 7.12 × 103 g |
| 0.8 | 7.15 × 103 g |
| 0.9 | 7.17 × 103 g |
| 1 | 7.20 × 103 g |
| Parameter | |||||
|---|---|---|---|---|---|
| value | 30 | 2.3 | 3.6 | 2.0 | 1.5 |
| Parameters | |||||
|---|---|---|---|---|---|
| Value | 5 | 2 | 0.23 | 0.07 | 1.6 |
| (s) | 1.1 | 1.6 | 2.2 |
|---|---|---|---|
| Proportion (%) | 50.4 | 18.5 | 31.1 |
| Parameters | |||||
|---|---|---|---|---|---|
| value | 5 | 2 | 0.45 | 0.25 | 1.6 |
| (s) | 0.6 | 0.7 | 0.9 | 1.1 |
|---|---|---|---|---|
| Proportion (%) | 57.0 | 24.0 | 7.0 | 12.0 |
| Parameter | ||||
|---|---|---|---|---|
| Value | 260 m | 160 m | 0.036 | 0.016 |
| Experimental Category | Vehicle Type | Parameter Values | |
|---|---|---|---|
| Influence Factor Analysis | Intelligent Vehicle Infiltration Rate | Manual Vehicle (Fuel) Intelligent Vehicle (Fuel) | P = 0, 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, 100% |
| Percentage of Vehicles Exiting the Ramp | P = 40%; = 0%, 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, 100% | ||
| Dedicated Lane for Autonomous Vehicles | P = 0, 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, 100% | ||
| Analysis of Carbon Emissions in Electric Vehicle Fleets | Scale of Electric Vehicle Fleet | Manual Vehicle (Fuel) Intelligent Vehicle (Fuel) | P = 40%; N = 1, 2, 3, 4 |
| Desired Time Headway of Intelligent Vehicles | Manual Vehicle (Fuel) Intelligent Vehicle (Electric) | tc = 0.6 s; ta = 1.1, 1.6, 2.2 s; P = 0, 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, 100% | |
| ta = 1.1 s; tc = 0.6, 0.9, 1.1 s; P = 0, 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, 100% | |||
| Mixed Fleet Size | P = 40%; N = 1, 2, 3, 4 | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, X.; Chen, F.; Li, B.; Liu, L.; Xiang, Y. Analysis of Carbon Emissions in Heterogeneous Traffic Flow within the Influence Area of Highway Off-Ramps. Appl. Sci. 2023, 13, 9554. https://doi.org/10.3390/app13179554
Su X, Chen F, Li B, Liu L, Xiang Y. Analysis of Carbon Emissions in Heterogeneous Traffic Flow within the Influence Area of Highway Off-Ramps. Applied Sciences. 2023; 13(17):9554. https://doi.org/10.3390/app13179554
Chicago/Turabian StyleSu, Xiaozhi, Fangrong Chen, Bowei Li, Liangchen Liu, and Yun Xiang. 2023. "Analysis of Carbon Emissions in Heterogeneous Traffic Flow within the Influence Area of Highway Off-Ramps" Applied Sciences 13, no. 17: 9554. https://doi.org/10.3390/app13179554
APA StyleSu, X., Chen, F., Li, B., Liu, L., & Xiang, Y. (2023). Analysis of Carbon Emissions in Heterogeneous Traffic Flow within the Influence Area of Highway Off-Ramps. Applied Sciences, 13(17), 9554. https://doi.org/10.3390/app13179554