1. Introduction
The mechanical properties of materials have been a primary area of practical application and extensive study. Nevertheless, many material designs remain theoretical as they are not producible or experimentally verifiable due to manufacturing process limitations. However, the advent of additive manufacturing and machine learning design technologies has presented a practical manufacturing method for modern material design. Additive manufacturing technology offers greater freedom for material design with its superior mechanical properties and high precision compared to traditional machining processes like turning, milling, casting, forging, and welding. Consequently, the concept of metamaterials has emerged.
The term “metamaterials” derives from the prefix “meta” meaning “beyond”, implying that the properties or structure of these materials surpass those of traditional materials. The introduction of this terminology originated from a paper published by Smith et al. [
1], which investigated a material with negative permeability and dielectric constant at microwave frequencies. Progressively, researchers gained a better understanding of the metamaterial concept. In essence, metamaterials are composite materials and artificial composite structures designed and created with specific parameters, mimicking the attributes and properties of natural materials. The resulting material exceeds the abilities of the natural ones that make it up, and its macroscopic characteristics are largely determined by the microstructure of the material. Barchiesi et al.’s [
2] work focused on the evolution and advancement of metamaterials, including their connections with emerging technology. Consequently, they showed that human thought plays a pivotal role in constructing new theories, as stated by Carnap’s [
3] deductive and falsificationist methods in the early 20th century.
In recent years, metamaterials research has rapidly progressed across various disciplines, including fundamental physics, optics, materials science, mechanics, and electrical engineering. Metamaterials research is roughly categorized into extraordinary electromagnetic materials [
4], optical metamaterials [
5,
6,
7], acoustic metamaterials [
8,
9], thermal metamaterials [
10], and mechanical metamaterials. Yu et al.’s [
11] taxonomy classified mechanical metamaterials into four types: (1) strong lightweight materials concerning Young’s modulus, (2) tunable stiffness materials concerning shear modulus, (3) negative compressibility materials concerning bulk modulus, and (4) negative Poisson’s ratio materials concerning Poisson’s ratio.
In recent years, the study of mechanical metamaterial structures has led to significant interest among researchers in negative Poisson’s ratio materials. Regarding the structure of negative Poisson’s ratio materials, researchers have conducted a lot of theoretical and applied research [
12,
13]. The analysis of negative Poisson’s ratio materials can be approached from the following aspects.
Kolpakov [
14] was the first to propose an approximate calculation method to determine the average elastic properties of periodic unit cell framework structures, and he discovered the construction of a framework that has negative Poisson’s ratio properties. Evans [
15] named materials with a negative Poisson’s ratio effect as “auxetic materials”. Negative Poisson’s ratio materials have higher stiffness, strength, energy absorption, and damage resistance than materials with a positive Poisson’s ratio [
16]. Some complex porous structures made up of ligaments with complex shapes and density gradients have higher structural efficiency than some traditional materials. For example, a comparison can be drawn between the pyramid complex in Giza, Egypt, and the Eiffel Tower in Paris. Even though the structure of the Eiffel Tower is similar to that of the pyramid complex, it has twice the height and is three orders of magnitude lighter in weight [
17].
The first thermodynamically stable model with an isotropic phase of the negative Poisson’s ratio was studied using Monte Carlo simulations in Wojciechowski [
18]. It was shown that depending on the density or molecular anisotropy, the model can show any negative value of the Poisson’s ratio allowed for isotropic systems [
19]. Hoover et al. [
20], using computer simulations, investigated auxetic properties on the mezoscopic level. The first isotropic chiral structures were those proposed by Wojciechowski [
21]. Later, many scholars simplified and analyzed these structures [
22,
23,
24]. Tretiakov [
25] and Narojczyk et al. [
26] provided ideas for the design of negative Poisson’s ratio structures in the microscopic domain. Czarnecki et al. [
27,
28] reported certain innovations in the optimization method. It is also important to stress that some apparently auxetic structures can show completely nonauxetic properties [
29,
30,
31].
Structures with a negative Poisson’s ratio can be designed using two approaches: intuition and creativity and precise mathematical and mechanical calculations using topology optimization. While most proposed mechanical metamaterials are designed empirically, topology optimization has become a more suitable method for mechanical design.
In the field of topology optimization, different approaches to topology optimization are emphasized in different domains. With the expansion of application areas, an increasing number of theories and methods have been introduced. Bendsøe et al. [
32] proposed the simplified isotropic material with penalization (SIMP) method, which introduces a hypothetical variable density as a design variable acting on the physical parameters of the material (such as the elastic modulus). By changing the density ρ of the structure’s elements, the topology of the structure can be altered. Xie et al. [
33], building upon the previous evolutionary structural optimization (ESO) method, introduced a more mature method called bi-directional evolutionary optimization (BESO). This method is often used for optimization problems such as minimizing displacement, and it does not require sensitivity analyses. Da et al. [
34] proposed the evolutionary topology optimization (ETO) algorithm, which can generate clear and smooth boundaries. Additionally, the resulting designs are less dependent on the initial guessed design and finite element mesh resolution. Fu et al. [
35] introduced a novel smooth continuum topology optimization algorithm called smooth-edged material distribution for optimizing topology (SEMDOT). This algorithm was shown to obtain designs with smooth and clear boundaries, and it is characterized by its ease of use, flexibility, and high efficiency. Hang [
36] presented a floating projection topology optimization (FPTO) method, which is used to seek smooth designs using alternative material models or 0/1 designs using material penalization models.
Lakes [
37] introduced an isotropic negative Poisson’s ratio foam structure that was derived from traditional low-density open-cell polymer foam. This foam structure exhibited enhanced elasticity compared to conventional foams. The study provided insights into the design of novel re-entrant foams as a precursor to future developments in negative Poisson’s ratio materials. Xia et al. [
38] utilized a MATLAB-based, energy-based homogenization method to optimize the topology of negative Poisson’s ratio materials. Their optimization targets included the bulk modulus, shear modulus, and Poisson’s ratio. Similarly, Lee et al. [
39] introduced a topology optimization approach that used Gaussian point density as a design variable. This method served as a basis for developing materials with a negative Poisson’s ratio and showcased the efficacy of topology optimization tools in analyzing such materials. Chen et al. [
40] combined negative and positive Poisson’s ratio topologies to achieve an effective zero Poisson’s ratio topology, demonstrating the unique performance of each and providing valuable data for the design of novel structures. Chatterjee [
41] used bidirectional evolutionary topology optimization and energy-based homogenization methods to show how material uncertainty can affect the optimal microstructure of mechanical metamaterials, highlighting the importance of considering uncertainty in topology optimization for the mechanical performance and robustness of metamaterials.
This study uses a variable density topology optimization algorithm to design a beetle-inspired concave structure by adjusting the material distribution factor. The designed structure is then manufactured using 3D printing. The effective elastic modulus and Poisson’s ratio are explored using mechanical theory, and the mechanism associated with the structure’s energy absorption is analyzed by examining various structural parameters using simulation results.
2. Design of a Negative Poisson’s Ratio Structure Based on the Variable Density Method
This section seeks negative Poisson’s ratio structures using topology optimization. The widely used methods include homogenization, variable density, level set, and progressive methods. The SIMP method is widely used in finite element software programs. It offers several advantages in microstructure design. Therefore, it is selected as the method for this study. The basic idea of this method is to use the density of each element as a design variable, calculate the effective material parameters corresponding to the density value using the homogenization method, and obtain the optimal distribution of materials throughout the structure using iteration [
42,
43].
2.1. Objective Function
Assuming the relationship between stress and strain is:
where the expression of
for the homogenized elastic tensor is:
where
is the base cell domain,
is the elasticity tensor in index notation,
is the unit test strain fields, and
is the periodic fluctuation strain fields.
According to Sigmund’s [
44] proposed theory of element interconnectivity, further calculations for topology optimization are facilitated. The Formula (2) is rewritten as follows:
where N is the number of elements obtained by dividing the entire design domain into N parts,
is the element displacement vector for load case
ij, and
is the stiffness.
The objective of topology optimization in this paper is to design a suitable structure in a two-dimensional plane and then finally convert
into
in a two-dimensional problem. To do this, we rewrite Equation (4) in extended form, as shown below:
where
and
are the theoretical equivalent moduli of elasticity in directions 1 and 2, respectively,
and
are the principal strain energies in directions 1 and 2, respectively, and
and
are theoretical shear modulus and the shear strain energy, respectively.
where
is the element e mutual energy,
is the element displacement vector for load case
ij, and
is the element stiffness matrix.
The method uses Young’s modulus based on the pseudo-density of the element.
In the equation, is the Young’s modulus of the final material, is the Young’s modulus of the substitute material, and is the Young’s modulus of the starting material.
Directly using the Poisson’s ratio formula -
C12/
C11 as the objective function and the existing optimization criteria for iterative optimization can be highly challenging. However, based on the formulation proposed by Xia [
38], topology optimization introduces different relaxation factors into two-dimensional problems. This approach enables the optimized topology structure to maintain a negative Poisson’s ratio while significantly improving the unidirectional stiffness of the resulting microstructure unit cells.
The mathematical expression of the objective function in the final optimization problem is:
where
is the objective function,
is the number of iterations,
is the sparse matrix of the total stiffness of the structure,
and
are the force vector and displacement vector of the structure, respectively,
is the volume of the
e-th element,
is the volume constraint after optimization, which is the product of the volume fraction and the original volume, and
is the design variable, that is, the relative density of each element.
To ensure continuity in the derivation, when both geometric shapes and loads exhibit symmetry, it is possible to apply them directly without converting them into traditional boundary conditions. This type of boundary condition is referred to as a periodic boundary condition (PBC). Such a boundary condition can be directly imposed on a finite element model using constrained nodal displacements, while also satisfying the periodicity and continuity requirements of both displacement and stress.
2.2. Sensitivity Calculation
Throughout optimization, the degree to which a cell is retained or deleted is determined by the sensitivity of that element. In topology optimization, sensitivity describes how strongly a design variable affects the optimization objective. By identifying the design variables with the strongest influence on the optimization objective, the algorithm can find the direction toward the optimal solution.
The direct differentiation method is used to solve the sensitivity by differentiating the objective function with respect to the design variables. The sensitivity of the objective function to the design variables can be expressed as:
The following expression can be obtained by combining Equations (7) and (9):
Substituting Equation (6) into Equation (10) gives:
According to Equation (11), it can be found that the number of iterations , penalty factor , Young’s modulus , and , relaxation factor will all have an impact on the optimization of the objective function.
2.3. Optimization Examples and Analysis
The example in
Figure 1 uses N_x and N_y to represent the number of elements in the x and y directions of the initial structure, respectively. The volume fraction is defined as the percentage of the optimized structure’s volume to the initial volume. For example, if volfrac = 0.5, the volume of the optimized structure is 50% of the initial volume. The variable density method requires a penalty factor, which penalizes intermediate density units to minimize the number of density units and make the density tend toward 0 or 1. An appropriate penalty factor is crucial since a small penalty factor creates many gaps that make material manufacturing difficult, while large penalty factors increase optimization iterations and time costs. The filtering radius affects the material density distribution and stability of optimization results. A larger filtering radius increases smoothness at the expense of the accuracy and details of the optimization results, creating refinement and instability. Choosing the right optimization parameters is, therefore, crucial. There are two types of filtering options: density filtering and sensitivity filtering. Density filtering involves modifying the sensitivity information of the objective function and volume constraints to obtain pseudo-densities for each element. On the other hand, sensitivity filtering directly filters the sensitivity information of the objective function using the design variables, which represent the pseudo-densities of the elements. During topological optimization, the interior of the structure is set as a “blank area” to maintain material connectivity and ensure physical feasibility. Material density in these blank areas is relatively low.
N_x and N_y determine the initial size of the structure but have minimal influence on the optimized structure. The volume fraction and blank region radius directly impact the morphology of the optimized structure. Therefore, fixed values are chosen for the penalty factor and filtering radius due to their widespread applicability. Different filtering methods have a significant impact on both the structure and the objective function, so they are chosen as parameters to be varied. Taking into account the effects of these parameters, six sets of data in
Table 1 are selected for MATLAB programming to implement the topology optimization algorithm. The final values of the objective function are compared to determine the most suitable parameters.
Figure 2 presents the numerical variation charts for the objective function obtained by comparing the six sets of data. The charts show that the value of the objective function rapidly decreases as the number of iterations increases and then stabilizes at a converged value. However, groups E and F exhibit oscillations between two objective function values, which may be due to the optimization algorithm being trapped in a local minimum. Sensitivity filtering smooths the objective function during the optimization process, but changing the initial value or parameters is necessary to achieve convergence. To improve the optimization results, the value of β will be changed in the next step of this article to achieve optimal convergence.
The final objective function value can be affected by the volume fraction, filtering method, and size of the blank region, while the number of basic units remains constant. By comparing groups A, B, and C, it was observed that smaller volume fractions resulted in larger objective function values. Moreover, using sensitivity filtering reduced the objective function value, as noted with the comparison between groups A and D. Additionally, the radius of the blank region affects the objective function value, although the impact is irregular, and an optimal blank region size must be identified. Given these observations, this article selects data sets A, D, and E to study the impact of the relaxation factor β on the objective function by changing its value.
The unit cell configurations for group A under different β values are shown in
Table 2 and
Figure 3.
The unit cell configurations for group D under different β values are shown in
Table 3 and
Figure 4.
The unit cell configurations of group E under different β values are shown in
Table 4 and
Figure 5.
In the tables, the values for
C12 and
C11 represent the theoretical equivalent elastic modulus. Poisson’s ratio is calculated using the formula
C12/
C11. Notably, Poisson’s ratio is defined within the range of −1 to 0.5 within the elastic regime. It should be stressed that in two dimensions, the Poisson’s ratio for isotropic media can vary between −1 and +1 [
21]. For anisotropic systems, PR may take an even broader range of values.
From the above data analysis, significant changes in the value of the objective function occur when β = 0 and β = 0.002 for Group D, as well as when β = 0 and β = 0.005 for Group E. When the β values in Groups A, D, and E are too large, the corresponding objective functions are all zero. As β increases, the material in the x-direction decreases, while the material in the y-direction increases. From this observation, it is affirmed that the relaxation factor β could influence the design of negative Poisson’s ratio structures. When the β value in Group A exceeds 0.004, the β value in Group B exceeds 0.010, and the β value in Group C exceeds 0.020, the decrease in the material in the x-direction is extensive, resulting in over-optimization and the emergence of a vertical beam. At this point, the Poisson’s ratio of the beam is akin to the Poisson’s ratio set as a basic material value of 0.3.
The optimal selection for basic values of topology optimization involves a relaxation factor β = 0.02, as obtained from group E. The selection comprises 100 x elements, 100 y elements, a volume fraction of 0.5, a penalty factor of 3, a filter radius of 5, density filtering, a blank radius of 20, and a relaxation factor β = 0.02. The final expression for topology optimization is as follows:
The objective function and Poisson’s ratio variation during the topology optimization process are shown in
Figure 6 and
Figure 7, respectively.
5. Conclusions
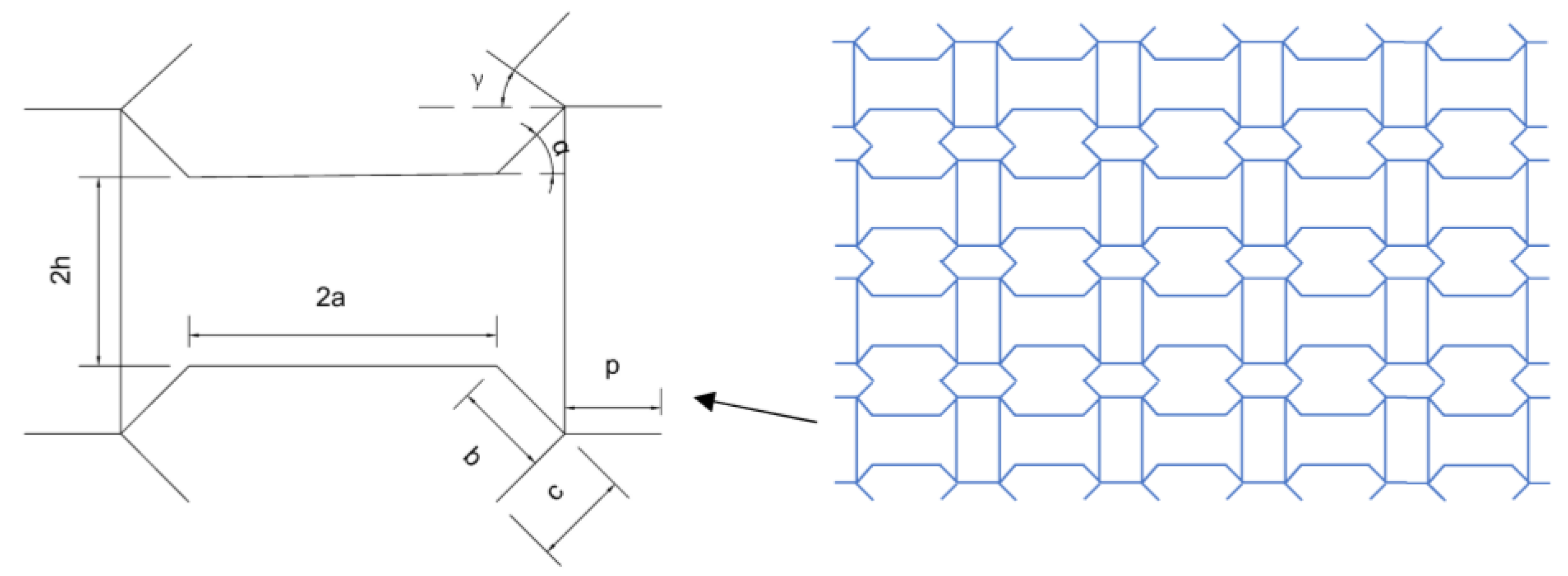
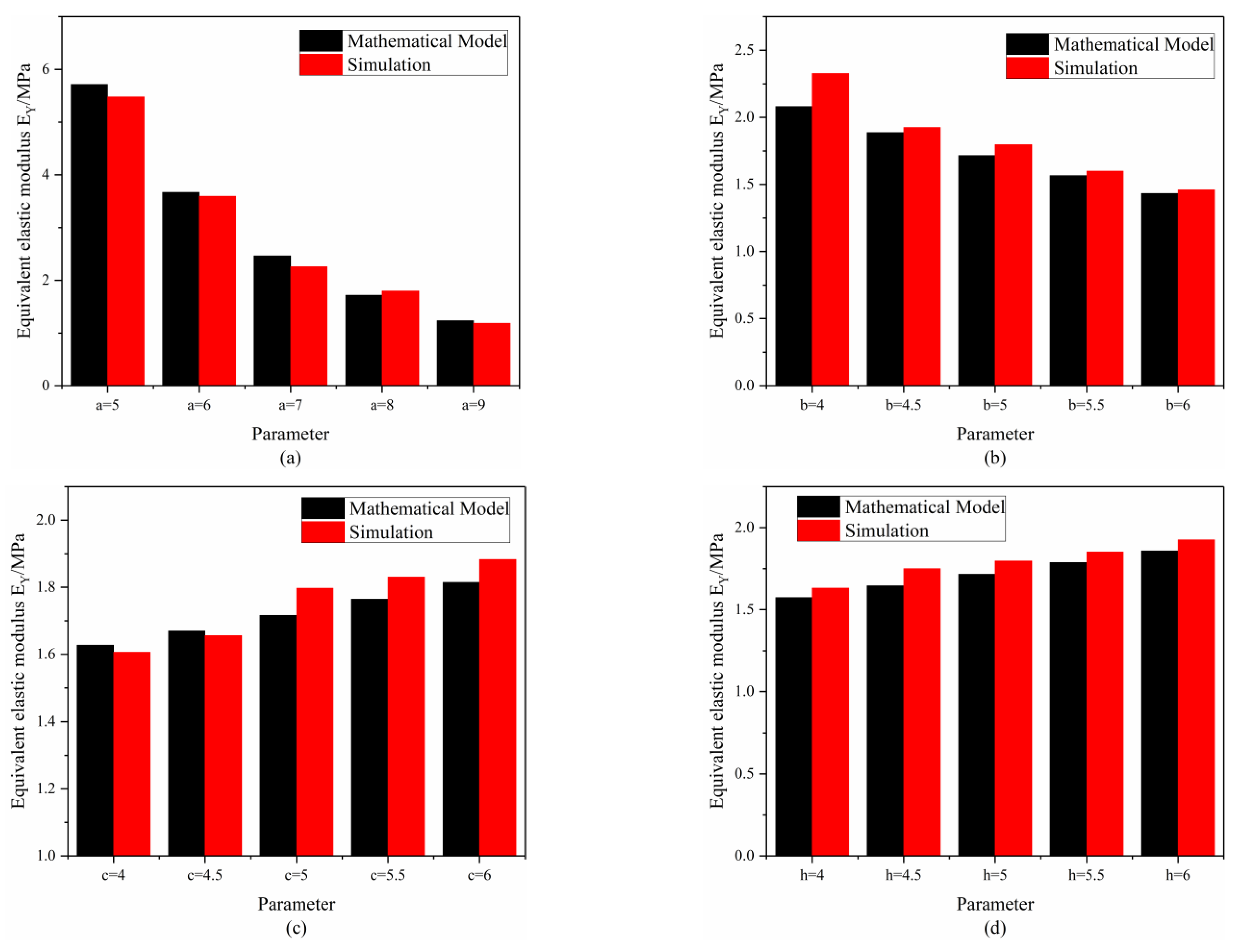
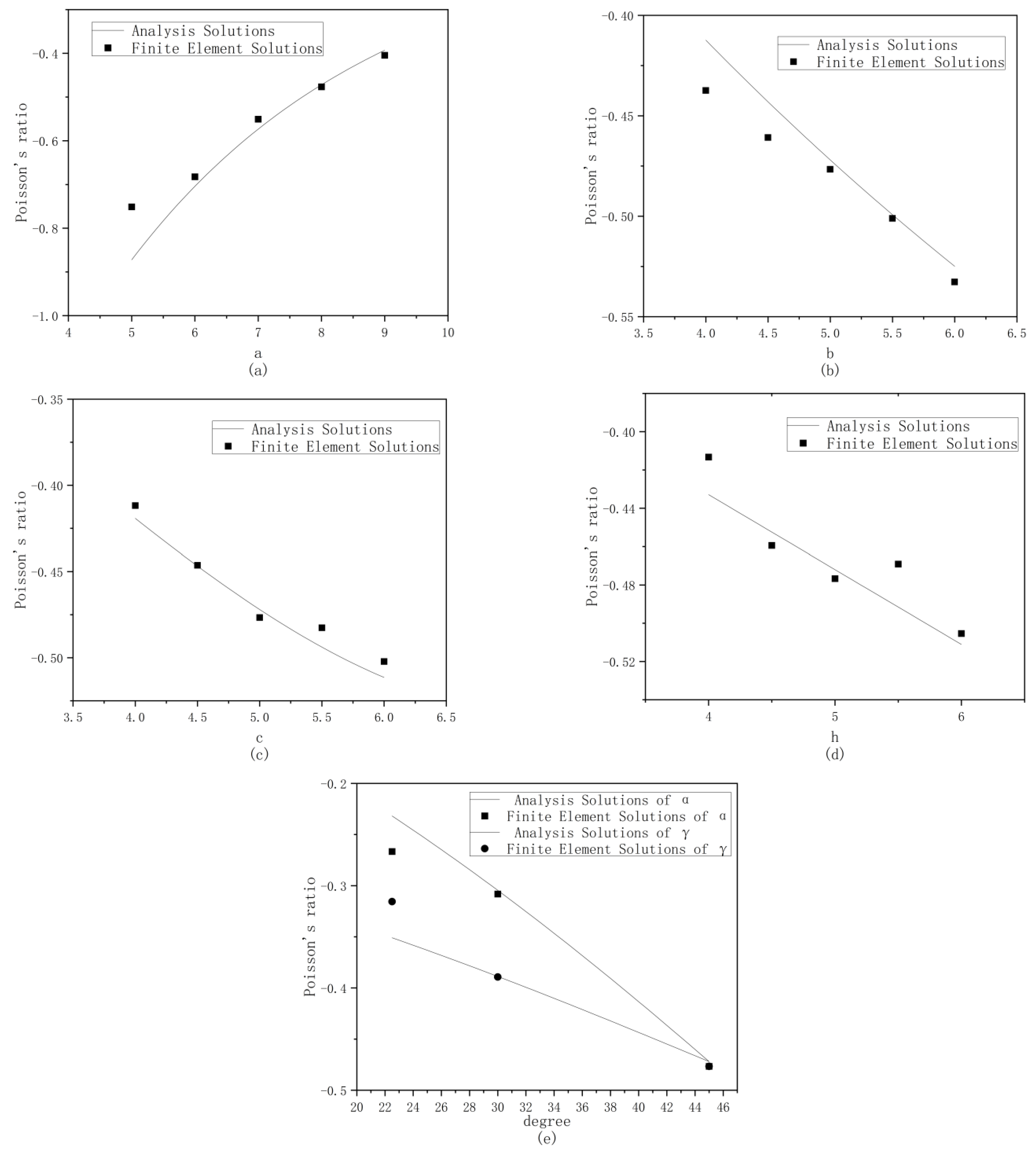
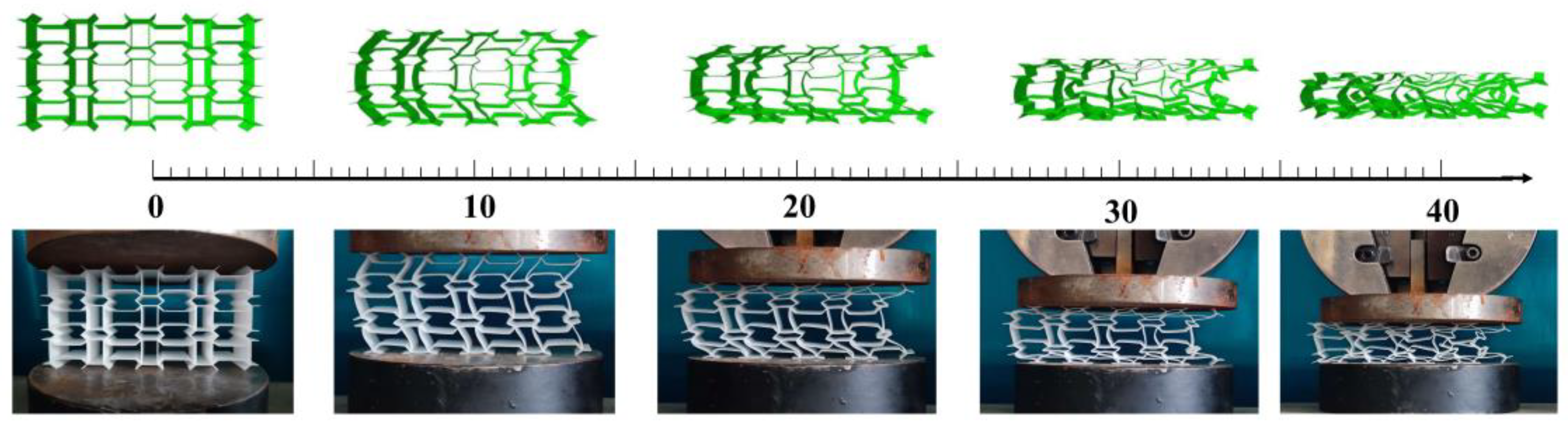
This article suggests modifying the optimization parameters in topology optimization to regulate the final structure, ensuring that it has a negative Poisson’s ratio. The mechanical properties of the structure were analyzed using theoretical, quasi-static compression, and finite element analyses. Following verification of the finite element model, numerical simulations examined the size of the concave beetle-inspired structure, including dimensions a, b, c, and h and angles α and γ.
Based on the results, increasing the size of a moderately reduced the specific energy absorption of the concave structure, exhibiting a linear relationship. The sizes of b and c nonlinearly impacted the specific energy absorption of the concave structure, with increasing b and c initially boosting and then lowering the specific energy absorption. Overall, the specific energy absorption of the structure fluctuated and decreased with increasing h, while α and γ values exerted a significant impact on the specific energy absorption of the structure. The results indicate that selecting structural dimensions considerably affects the specific energy absorption characteristics of the structure, and optimizing the structure’s design can enhance the energy absorption performance by up to 40% compared to the suboptimal case.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}