1. Introduction
One of the main challenges of Internet of Things (IoT) technology is to find adequate power supply [
1]. The current trend is integrating the IoT system with sensors and wireless communication components. Consequently, there are higher requirements for wireless communication, sensor miniaturization, and reduced power consumption of electronic devices. Energy harvesting is a promising technique that converts unused abundant environmental energy into electrical energy. Therefore, kinetic (or vibration) energy harvesting systems are considered potential candidates to supplement electrical energy sources for self-powered sensors, IoT technology, and wearable microdevices (MEMS). All harvesters use transducer mechanisms to convert mechanical energy into electricity. The most popular ones are electromagnetic, piezoelectric, and electrostatic.
Electromagnetic harvesters (EHs) appear to be extremely promising in practice. One possible explanation for this is the high mechanical robustness of these mass-spring-damper constructions, which means that they can be installed with coils and magnets rather than with fragile piezoelectric crystals [
2] and that they can be applied at low frequencies. Most EHs rely on magnets oscillating in a coil suspended by a spring or magnetic levitation. In the paper [
3], various technologies were used for the fabrication of the harvester, and insights into the circuits used in real applications were given. That study primarily focused on design configurations, construction parameters, modeling, and experimental validation of transduction mechanisms and energy outcomes. Spreemann et al. [
4] demonstrated that an appropriate electromagnetic harvester architecture could improve efficiency by about 10%.
Magnetic levitation energy harvesters are interesting due to their capacity for operation in a low-frequency bandwidth. Therefore, they can be effectively applied in pendulum vibration harvester/absorber systems [
5,
6]. These harvesters have a simple and easy-to-maintain design, which eliminates the need for mechanical components such as springs. These systems have a non-linear stiffness profile due to magnetic forces producing a nonlinear frequency response, allowing more power to be collected over a larger frequency range. A comprehensive and systematic analysis of 21 design configurations of electromagnetic energy harvesters with magnetic levitation architectures is given in [
7]. These are classified into four types based on the number of coils and permanent magnets: single coil and single levitating magnet [
8,
9], single coil and multiple levitating magnets [
10,
11], multiple coils and single levitating magnet [
12,
13,
14], and multiple coils and multiple levitating magnets [
15,
16].
Several studies have found that the amount of energy harvested greatly depends on the geometric optimization of the harvester [
17,
18,
19]. Investigations have been made into magnetic levitation harvesters based on a single moving magnet in the coil. The magnetic restoring force is usually modeled as the Duffing hard characteristics [
20]. A study [
21] demonstrated that a magnetic levitation vibrational energy harvester exhibited features that were typical of chaotic dynamic systems. However, the state was more complicated than the Duffing equation, which was previously used to describe magnetic forces.
Liu et al. [
22] proposed a two-degrees-of-freedom harvester based on magnetic levitation. The effects of the key variables, such as the distance between the lower spring and the suspended magnet, excitation acceleration, spring stiffness, and the copper cylinder mass on the generated properties, were investigated. In reference [
23], a 2DOF magnetic levitation harvester with two magnetic springs and a series connection of two induction coils was described. In one of the tested configurations, the harvester’s performance improved by 10% compared to the 1DOF system. Mitura and Kecik [
24] studied the influence of resistance charge on the energy recovery in a 2DOF magnetic levitation harvester. They found that changing the distance between the magnets resulted in an optimal resistance variation of about 25%. A magnetically coupled electromagnetic energy harvester consisting of a pair of spring-connected magnets, coils, and a free-moving magnet was proposed in [
25]. A multi-harvester consisting of a pair of spring-connected magnets, coils, and a free-moving magnet was proposed in [
26]. Two configurations of a multi-generator were fabricated. In the first model, four generators were positioned side by side, while in the second model, the generators were positioned one above the other. The second design was clearly advantageous in terms of power density. The influence of scaling on a 2DOF velocity-amplified electromagnetic generator was presented in [
27]. It has been demonstrated that the electromagnetic coupling coefficient degrades more rapidly with scale. The optimization of the transduction mechanism in the harvester, consisting of two masses oscillating one inside the other between four sets of magnetic springs, including the collision effect in [
28], was analyzed. The 2DOF nonlinear electromagnetic energy harvester for ultra-low frequency excitations, as described in [
29], was also analyzed. It was realized by simply magnetically suspending a 1DOF harvester. The proposed design improved voltage and power outputs, expanded the operating bandwidth, and allowed for easy tuning of the operating frequency band.
In this study, we focus on the development of an electromagnetic energy harvester with a wider operational frequency applicable for low-frequency vibrations. The rest of the paper is organized as follows.
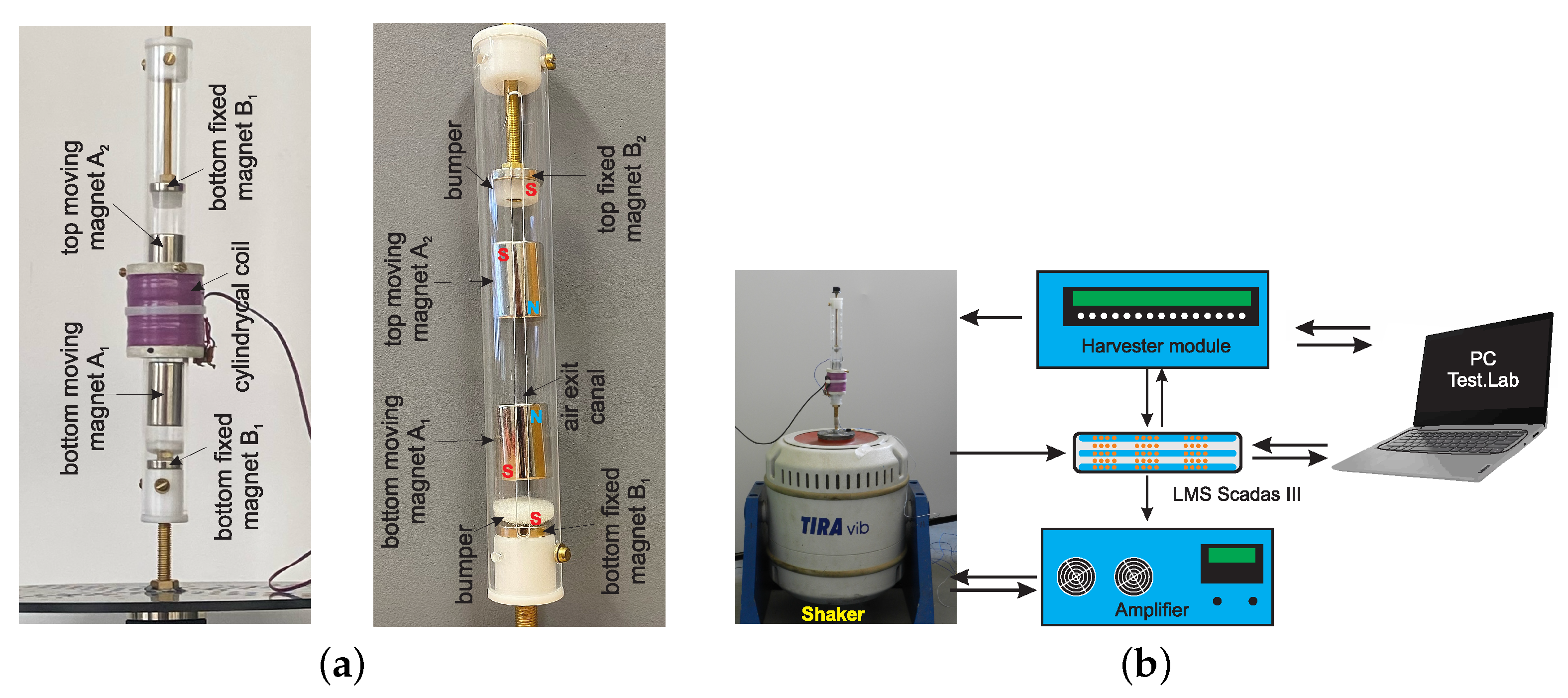
Section 2 is devoted to the modeling and prototyping of an electromagnetic harvester with a single coil and two levitating magnets. In this section, a new model of the magnetic suspension is proposed. Results and discussion are presented in
Section 3, and conclusions are presented in
Section 4.
3. Results and Discussion
In order to validate the proposed 2DOF harvester model in relation to the experimental results, the physical parameters of the device must be quantified. Most of them are easily measurable and are listed in
Table 2. The electromechanical coupling
is measured using a quasi-static test of a single magnet moving through the coil [
18]. The damping coefficients are determined by the parameter identification method based on experimental frequency response data (comparing time histories from numerical simulation and experiment; see paper [
24]).
Three differential Equations (
3)–(
5) were numerically solved using the path-following (continuation) method in the Auto-07p software (
https://sourceforge.net/projects/auto-07p/, accessed on 16 May 2023) [
30] in order to predict the magnets’ responses and output current over a range of frequencies for different acceleration levels. The continuation method is used to study bifurcations, such as equilibria, stability, periodic and homoclinic orbits, and boundary-value problems. More information about this method can be found in [
31].
3.1. Simulation Results and Model Validation
The validation of the numerical model is an important stage in ensuring the reliability of the results obtained. To that end, numerical results must be compared with experimental data.
Figure 6 shows an example of comparison of the numerical (blue line) and experimental (orange line with circles) frequency response qualitative curves for the bottom magnet (
Figure 6a) and induced current (
Figure 6b), respectively. The experimental curves were obtained by testing the harvester prototype on the dynamic workbench described in
Section 2.1. The frequency response was measured for a sinusoidal excitation on the shaker with an amplitude of
A = 0.6
g, where
g is the gravitational acceleration. The test was made for forward or backward frequency sweeps with a step 0.5 of Hz and an interval of 5 s.
Generally, the numerical model successfully predicted the nonlinear frequency response curves, and it is observed that the experimental and simulation results are consistent. The presence of two resonance peaks is confirmed, although the experimental peak values are considerably lower.
These differences could be explained by the estimates of damping and the assumptions of constant magnet friction and fixed electromechanical coupling. These assumptions are responsible for errors in the calculation of the numerical resonance curves. Moreover, the resonant frequencies of the experimental results are slightly shifted to the left compared to their numerical equivalents (a detuning phenomenon). This effect may be related to the small rotations of the magnet and the contact of the magnet with the bumper.
3.2. Frequency Response Curve
In the linear harvester, the magnitude of excitation does not affect the resonance bandwidth. However, in the nonlinear harvester, excitation has a great impact on response. Therefore, frequency response analysis is one of the most important analyses in nonlinear systems, because it shows the resonance frequencies of a system and the relative peak amplitude. The main aim of the frequency response is to obtain information about the magnet oscillation level and to obtain the frequencies where the recovered current (and power) is highest. In this subsection, the 2DOF nonlinear harvester is investigated using different excitation accelerations, e.g., from 0.2÷1
g. The maximum (MAX(x
), MAX(x
)) and minimum (MIN(x
), MIN(x
)) responses of both magnets and the output maximum current (MAX(i)) are analyzed. The displacements of magnets are measured according to the coordinate system from
Figure 5.
In
Figure 7, the maximum and minimum displacements of the top (
Figure 7a) and bottom (
Figure 7b) magnets, as well as the maximum recovered current (
Figure 7c), are shown. These diagrams were plotted by sweeping the frequency
from 20 rad/s to 140 rad/s, for different amplitudes: 0.2
g (black line), 0.6
g (blue line), and 1
g (green line). The dashed line denotes the static position (equilibrium) of both magnets, while the continuous line indicates the stable solution (stable fixed point). The red line between the fold (saddle-node) bifurcation points
denotes the unstable solution (unstable fixed point). Fold bifurcations occur when two equilibria come together and disappear [
32].
It can be noted that the main (first) resonance is observed for
≈ 60 rad/s, while the second one is for
≈ 120 rad/s. It should be noted that the maximal and minimal displacements are not symmetric. An increase in the amplitude of excitation causes an increase in the magnet oscillations, and the hardening effect can be observed. In the first resonance, the hardening effect characterizes two stable and one unstable solution, occurring for
A = 1
g (green line). The multistability is caused by a fold bifurcation (
) where the stable and unstable branches meet. The peak-to-peak top and bottom magnets’ output responses are quite similar and amount to 0.022 m (for
A = 1
g). Interestingly, the resonance of the recovered current shows two peaks close to the frequencies of
≈ 60 rad/s and 70 rad/s (
Figure 7c). These peaks are the result of the dynamic vibration absorption effect. The bottom magnet, for some parameters, causes vibration reduction of the top magnet (region between both peaks). This phenomenon exists in a 2DOF system. Between the two similar peaks, the recovered current decreases from 28 mA (for
= 58 rad/s) to 14 mA (for
= 60 rad/s). This means that the instantaneous power changes from 0.78 W to 0.2 W.
The second resonance exhibits a multistability behavior, which could already be observed for 0.6 g. This resonance is characteristic of lower magnet oscillations, and the recovered current is about 0.01 mA (0.1 W). However, the peak-to-peak top and bottom magnet response is about 0.02 m (for A = 1 g). It should be noted that the first resonance has a wider frequency bandwidth. Interestingly, close to the second resonance, for a frequency of ≈ 120 rad/s, a strong dynamic absorption of the top magnet occurs. For a frequency of ≈ 110 rad/s, the oscillation of the bottom magnet disappears.
In
Figure 7d, the multistability regions with two stable and one unstable solution in the first and second resonances are plotted (orange region). An analysis of both regions reveals that the multistability region in the second resonance is larger. When the excitation amplitude increases, the multistability tongues expand. However, in the first resonance, an unstable region appears (pink region in
Figure 7d), caused by the Neimark–Sacker (
) bifurcation. This bifurcation is interesting because it causes the equilibrium to lose stability.
The time histories of the bottom and top magnets (black lines) at
= 60 rad/s and
A = 0.6
g are shown and compared in
Figure 8a. Both time responses are similar and have two harmonic components.
For the top and bottom magnets, the peak-to-peak values are comparable and equal to approximately 0.008 m. The signal of the induced current (red line) is clearly periodic. The peak-to-peak induced voltage equals 0.024 A.
Figure 8b shows the time histories of the induced current in the first and second resonances for an amplitude of
A = 1
g. It can be observed that the peak-to-peak induced current decreased from 0.027 A to 0.015 A (comparing both resonances).
3.3. Influence of Amplitude Excitation
To determine the influence of the excitation amplitude on the system dynamics and nonlinear resonance, the excitation frequency was fixed, and then magnet responses were computed versus the bifurcation parameter A. Two fixed frequency values were applied: = 60 rad/s (blue line) and = 120 rad/s (black line). The two displacements were analyzed for each magnet ( and ). This means that the magnet oscillates between both lines. It is similar to the envelope of time series. For a certain range of parameters, the lines intersect, which means that more than one solution exists.
Figure 9a shows the bifurcation diagram for the top magnet.
Figure 9b,c presents the bifurcation diagrams for the bottom magnet and induced current, respectively.
All bifurcation diagrams correspond to each other and provide similar results. The bifurcation branches computed begin from the equilibrium point, which causes an increase in
A. An analysis of the results obtained for
= 60 rad/s shows four possible scenarios: (1) one stable solution, if the amplitude ranges from
A = 0 m/s
to the
point, and from the
point (
A = 12.5 m/s
) to
A = 20 m/s
; (2) two stable and one unstable solution between the bifurcation points
and
; (3) two unstable and one stable solution between
and
; and (4) a small region with only one unstable solution between
and
(pink region). The unstable periodic time courses in this region are shown in
Figure 9. The coexistence of the stable solutions (branches) results from the fold bifurcation points that change stability from stable to unstable (
) and from unstable to stable (
) during turning, and the coexistence of the solutions depends on the initial conditions.
For a frequency of = 120 rad/s (black line), only two bifurcation scenarios are observed. The first is one stable branch between 0 and and between and 20 rad/s. The second is two stable and one unstable solution occurring between the and bifurcation points. It should be noted that in the case with two stable solutions, one of them has a higher energy output. For example, for a frequency of = 120 rad/s and an amplitude of A = 10 m/s, the recovered energy from the bottom branch is about 0.016 W and that from the top branch is 0.064 W. The behavior of the two frequencies is different in the studied cases. In the first resonance, unstable solutions caused by NS bifurcations appear in the same branch. The unstable solution appears between the and bifurcation points.
3.4. Influence of Electromechanical Coupling
The electromechanical coupling coefficient (
) measures the efficiency of converting input mechanical energy into electrical energy. It can be changed by modifying the magnet–coil design, using specially designed magnets with separators, adding additional magnets, or modifying the resonance behavior [
33]. An increase in the coupling coefficient also causes greater damping in the harvester system, which makes this parameter crucial for energy harvesting. In strong nonlinear systems, especially those with many degrees of freedom and many electromechanical couplings, their impact is difficult to predict.
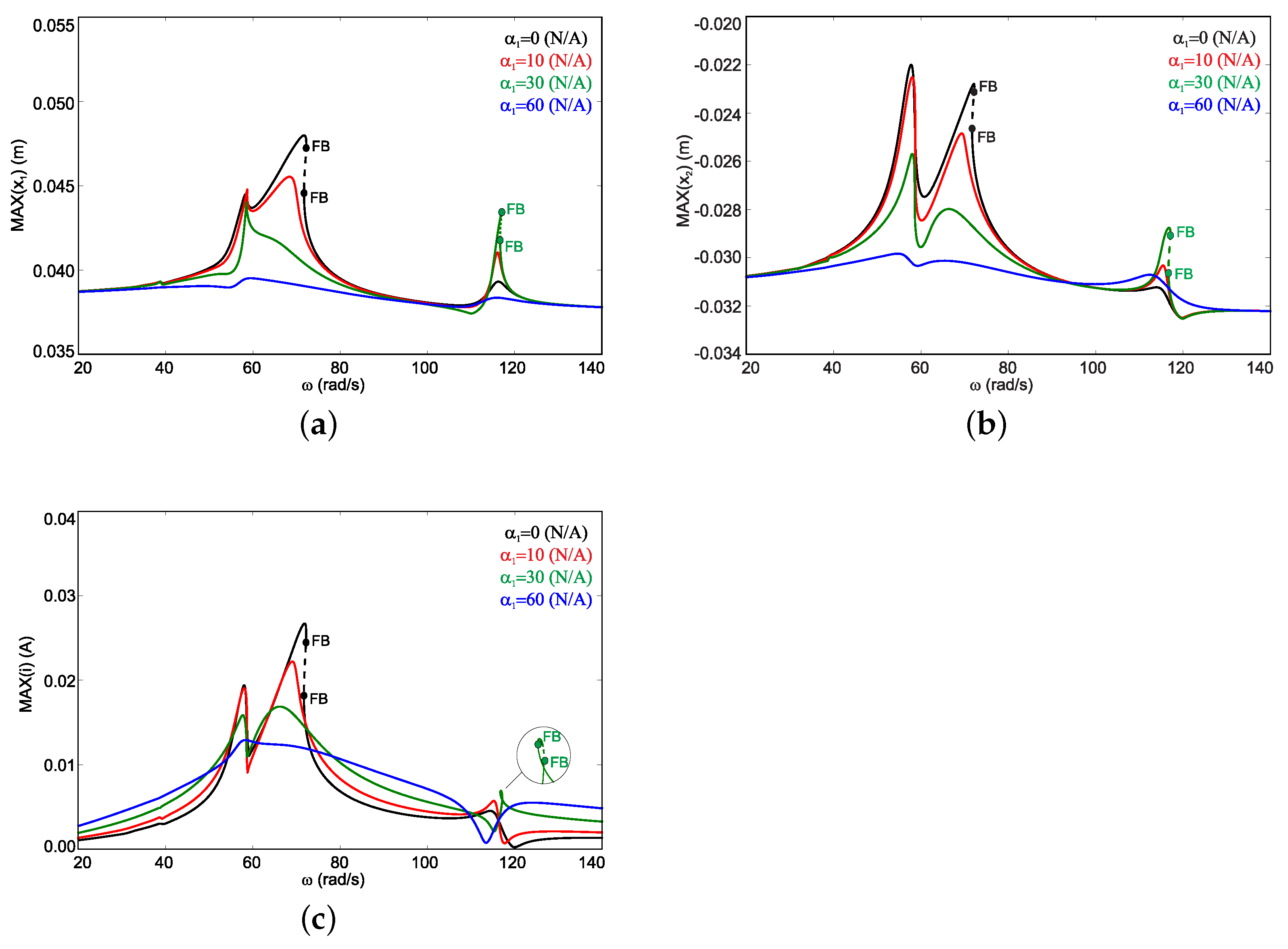
A comparison of the resonance curves for different electromechanical couplings is given in
Figure 10 and
Figure 11. The resonance curves were obtained by path following of the periodic solutions, starting from
= 20 rad/s. The circles denote the bifurcation fold points. Two strategies for electromechanical coupling analysis were applied. First, the electromechanical coupling between the top magnet and the coil (
) was modified, and the fixed value of the bottom magnet’s electromechanical coupling was assumed (
= 30 N/A). For
= 0 N/A (no coupling between the mechanical and electrical subsystems − black line), both magnets exhibit the highest oscillation, and the main nonlinear resonance (two peaks with a hardening behavior) is observed close to the frequency
= 60 ÷ 80 rad/s. For this case, the recovered current is the highest and amounts to about
= 0.038 A (
Figure 10c).
An increase in
to 10 N/A causes a reduction in the oscillation of both magnets in the first resonance (red line). When both electromechanical couplings are identical (green line), then the hardening effect occurs in the second resonance. For
= 60 N/A (blue line), the hardening effect is reduced in both resonances, and no bifurcation points occur. The obtained resonance curves are similar to those of the linear system [
34] (the bending effect is not observed). Interestingly, the peak in the second resonance is the lowest for
= 0 N/A, but higher for
= 30 N/A and
= 60 N/A. This means that the higher electromechanical coupling between the bottom magnet and the coil improved recovered current near the second resonance.
The second strategy is similar: a fixed electromechanical coupling between the top magnet and the coil was assumed (
= 30 N/A), and the parameter
was changed.
Figure 11 shows the influence of
on the harvester response and induced current. It can be observed that the
parameter plays a similar role to
. An increase in
causes the magnet amplitude to decrease and the main nonlinear resonance to be reduced. However, the in the second resonance, the recovered current is higher for an
of 30 N/A and 60 N/A.
An analysis of the obtained curves in
Figure 10 and
Figure 11 reveals that the electromechanical coupling influences the foldover effect that is responsible for the bending of the resonance curve in an amplitude versus frequency plot. The effect is characterized by two stable and one unstable solution. In
Figure 12a, a two-parameter continuation was used to obtain the foldover region in the main resonance. First, it was assumed that
= 0 N/A and that
and
were changed (dark orange color). Second,
= 0 N/A, and
and
were changed (light region). The continuation started at the
point (black point close to
≈ 77 rad/s) and followed the path to its subsequent positions (black borderline). The direction of path-following continuation was marked with arrows. The results showed that the critical values of the electromechanical couplings for foldover reduction were
= 12 N/A and
= 4 N/A. It should be noted that the foldover effect is more sensitive to the
parameter, which is in agreement with the resonance curves in
Figure 11.
Figure 12b shows the two-parameter continuation of the foldover effect occurring in the main resonance. The continuation began at the point where
=
= 30 N/A. For this case, both electromechanical couplings affect the foldover region in the same way. Interestingly, for some frequencies, the foldover regions overlap. This means that both couplings can be used to control the resonance curve bend.
The results of the numerical simulations indicate that the electromechanical coupling parameters and have a significant impact on the harvester dynamics and the recovered current. In addition to this, the electromechanical coupling parameters can be used for multistability control.
4. Conclusions
This study has investigated a two-degrees-of-freedom electromechanical vibration energy harvester. The numerical simulations and experimental prototype validation have confirmed the theoretical predictions. Magnetic suspension forces were estimated experimentally, and mathematical models were proposed.
The two resonances were detected and experimentally verified. In the resonance curves, the effect of dynamic vibration absorption was noticeable. A small shift between the numerical and experimental resonance peaks was observed. The frequency analysis showed the hardening effect for higher amplitudes of excitation. Inside the first resonance, an unstable region caused by the Neimark–Sacker (torus) bifurcation was observed. The bifurcation analysis showed the presence of multi-solution regions. Apart from the standard region with two stable and one unstable solution (hardening effect), two unstable and one stable solution were observed. The energy harvester benefits from the multistability because both the output response amplitude and the recovered power can be higher.
The analysis of the electromechanical couplings showed that these parameters acted as damping, generally reducing the main resonance. However, in the second resonance, an increase in the electromechanical coupling improved the induced current. Therefore, it can be concluded that a proper configuration of both couplings could increase the effectiveness of energy harvesting. This means that electromechanical couplings can be used to control harvester dynamics as well as energy harvesting.
In the future, the multistability and electromechanical coupling modification will be controlled by design of the magnet–coil system and also by using additional magnets close to the coil.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}