
A Harmonic and Interharmonic Detection Method for Power Systems Based on Enhanced SVD and the Prony Algorithm

Abstract
:1. Introduction
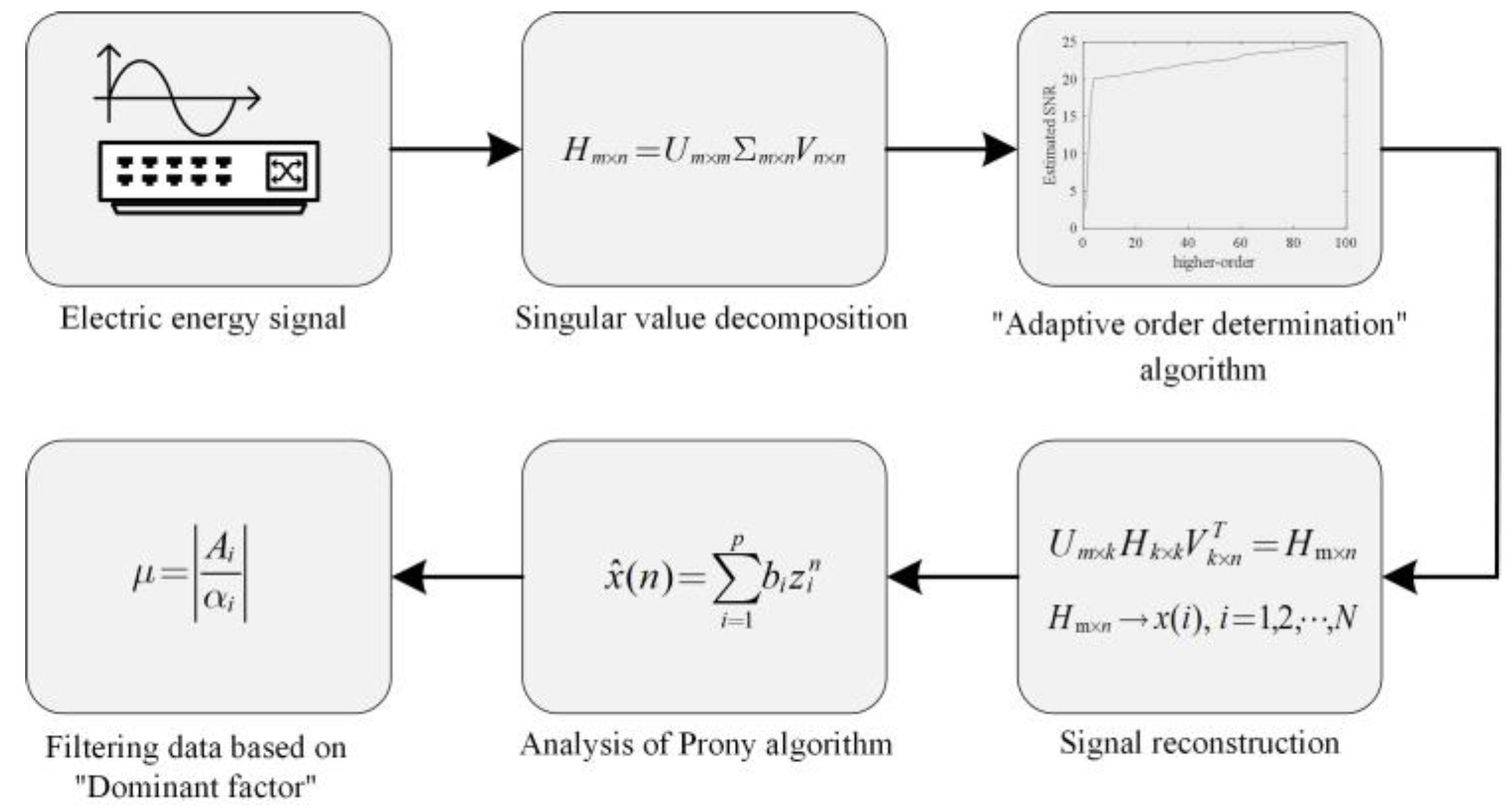
2. System Structure
3. Theoretical Analysis
3.1. Singular Value Decomposition (SVD) Denoising
3.2. Adaptive Order Algorithm
3.3. Prony Algorithm
3.4. Data Filtering
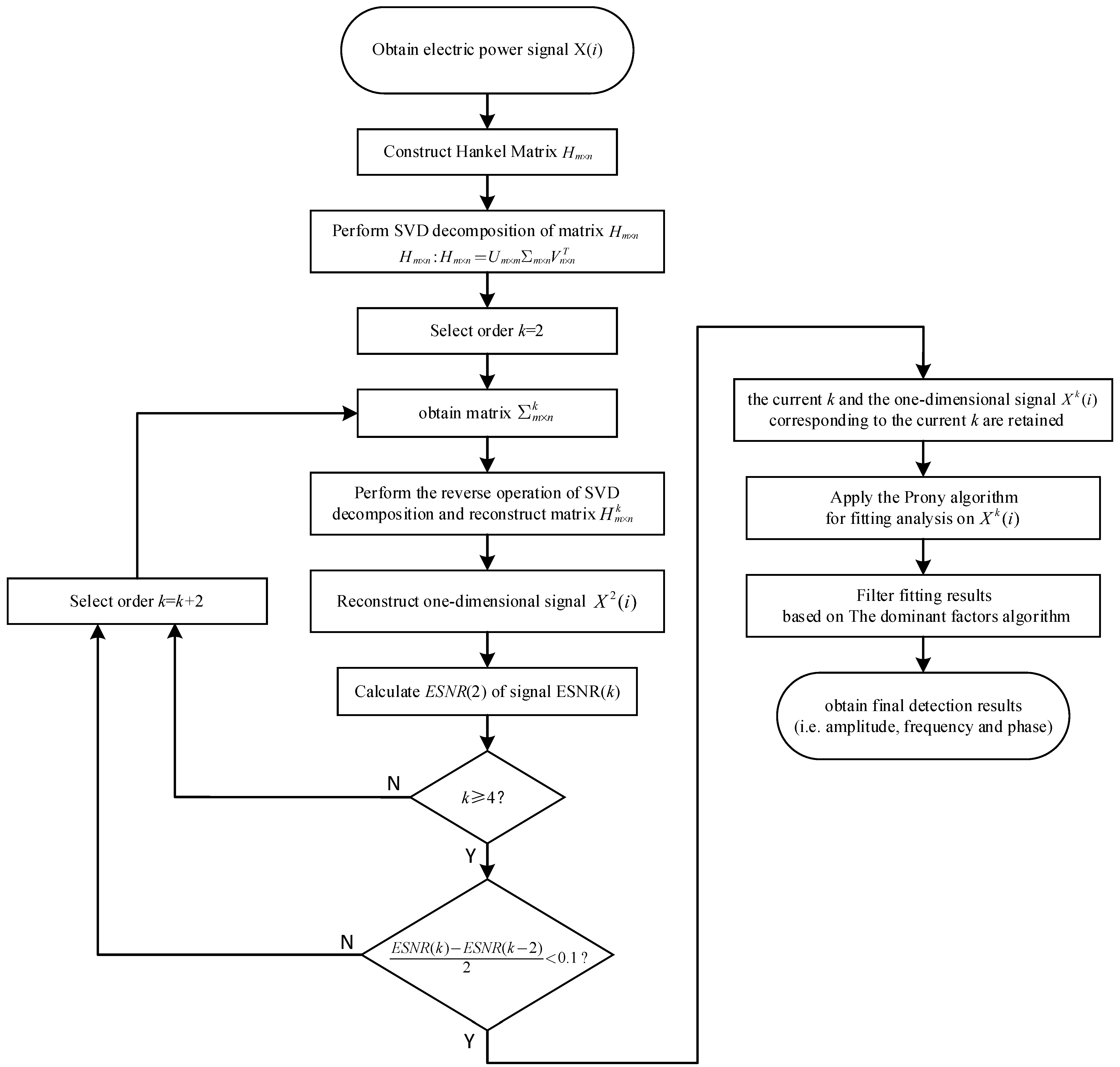
3.5. Algorithm Flow
| Algorithm 1: The Proposed Algorithm |
| 1: Obtain electric power signal . |
| 2: Construct electric energy signal as Hankel matrix . |
| 3: Perform SVD decomposition of matrix : . |
| 4: Select order of the eigenvalue matrix and set all eigenvalues after the second eigenvalue on the diagonal of matrix to zero to obtain matrix . |
| 5: Perform the reverse operation of SVD decomposition and reconstruct matrix after denoising according to |
| 6: Reconstruct one-dimensional signal according to matrix |
| 7: Calculate ESNR(2) of one-dimensional signal according to Equation (6). |
| 8: Select order of the eigenvalue matrix and set all eigenvalues after the fourth eigenvalue on the diagonal of matrix to zero to obtain matrix |
| 9: Perform the reverse operation of SVD decomposition and reconstruct matrix after denoising according to |
| 10: Reconstruct one-dimensional signal according to matrix |
| 11: Calculate ESNR(4) of one-dimensional signal according to Equation (6). |
| 12: Calculate rate of change between ESNR(4) and ESNR(2) according to . |
| 13: If rate of change does not meet , order of the eigenvalue matrix is selected, and steps 8–12 are repeated to obtain ESNR(6); rate of change between ESNR(6) and ESNR(4) is calculated; order is chosen by adding two to the previous value. |
| 14: When holds for the first time, the current (i.e., optimal order for SVD denoising) and the one-dimensional signal corresponding to the current (i.e., electric energy signal after denoising) are retained. |
| 15: Apply the Prony algorithm for fitting analysis on . |
| 16: Calculate the dominant factors of each frequency component in the fitting results according to Equation (19) and screen fitting results through Equation (20) to obtain the final detection results of harmonic and interharmonic signal parameters in the electric power signal (i.e., amplitude, frequency and phase). |
4. Simulation Analysis
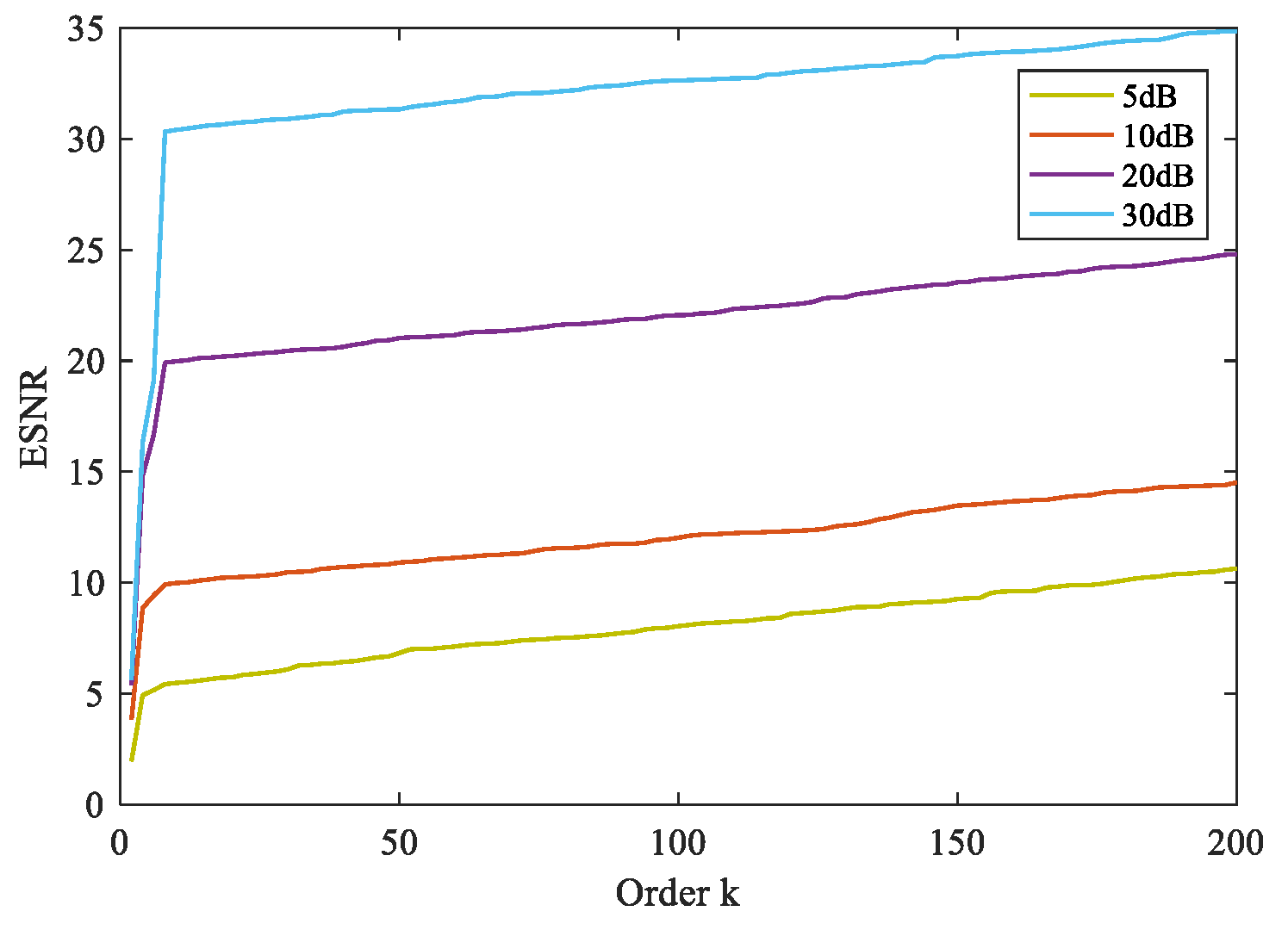
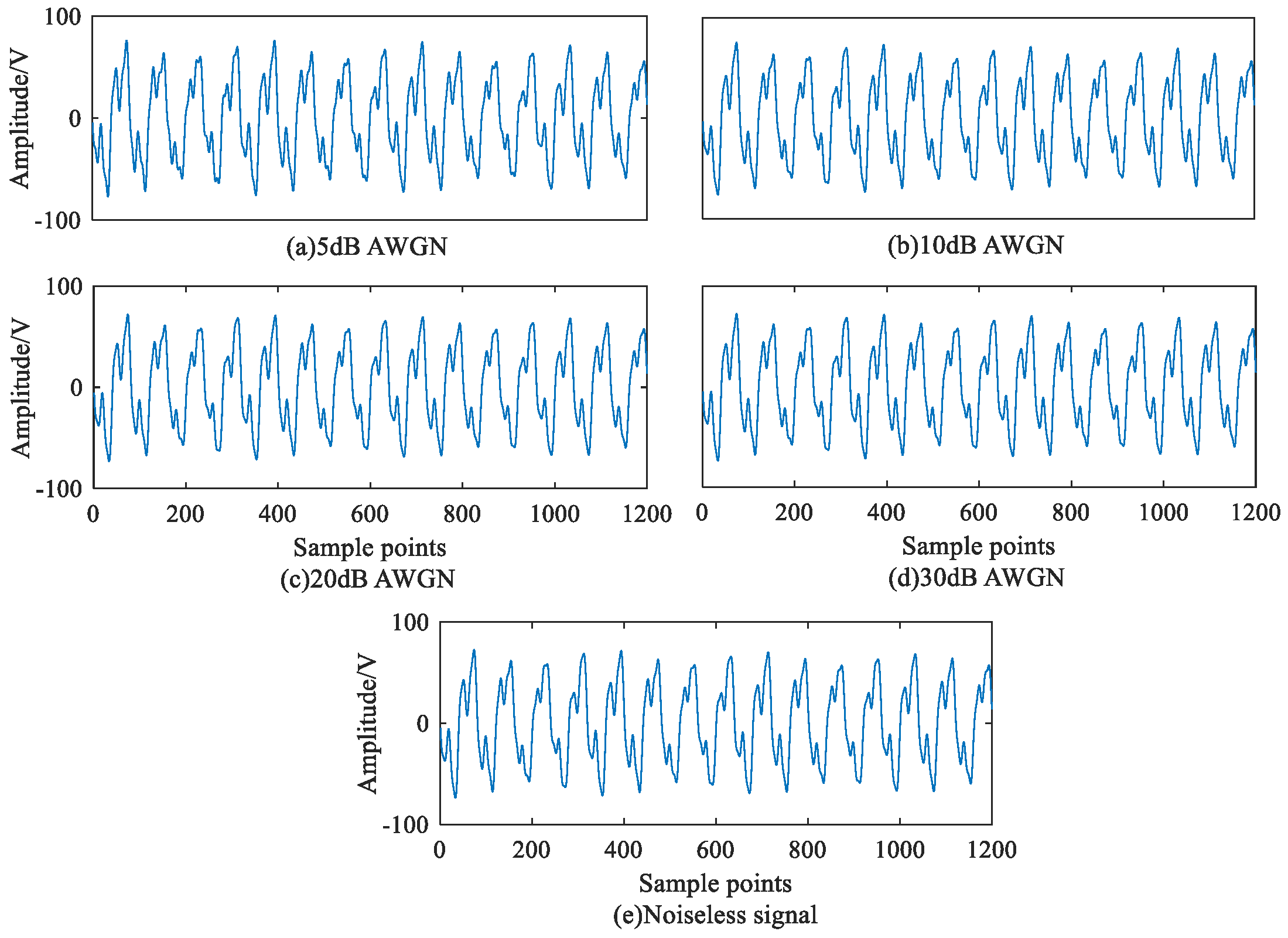
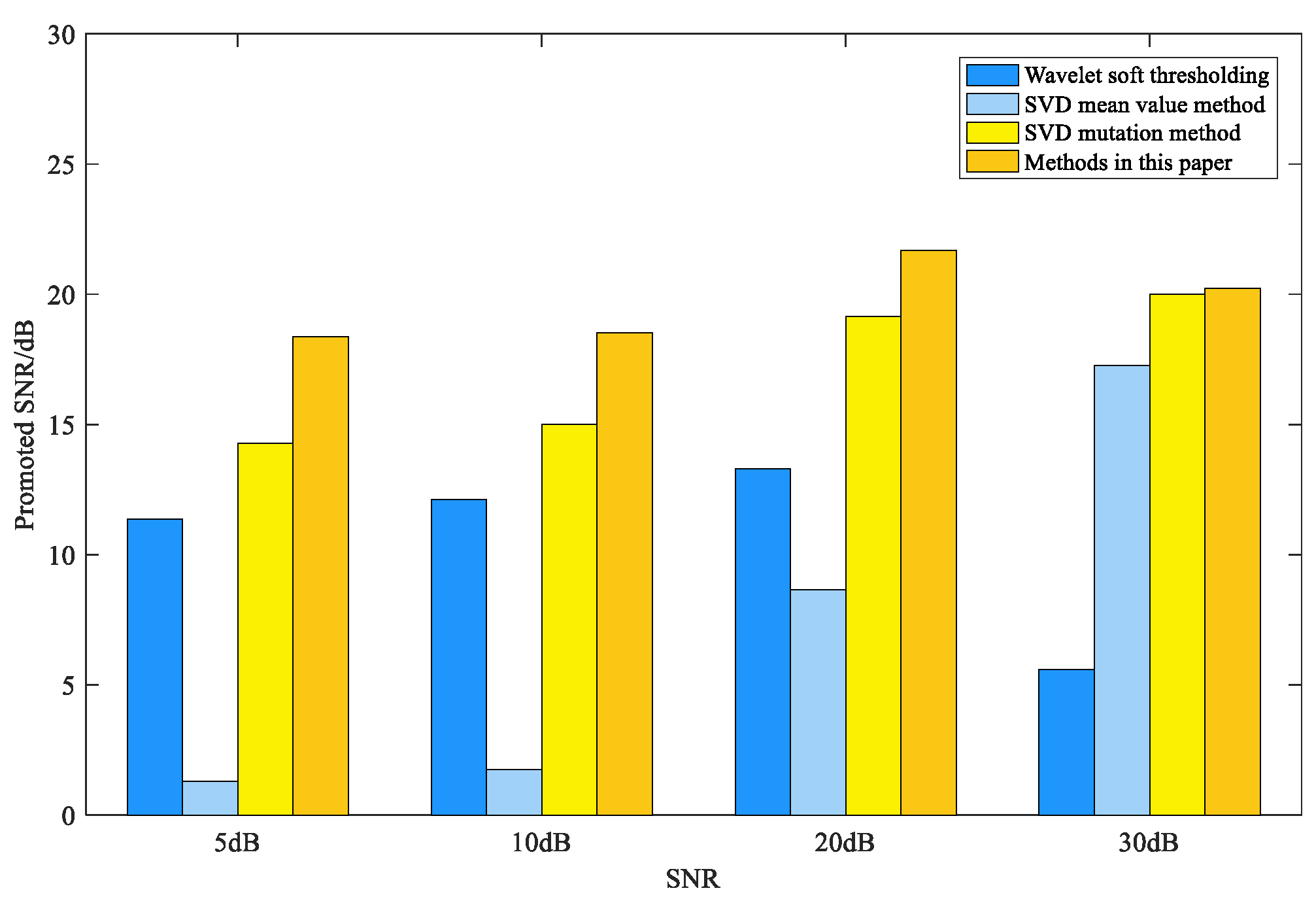
4.1. Signal Denoising
4.2. Detecting Harmonic and Interharmonic Signals
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lu, Y.; Xiao, G.; Wang, X.; Blaabjerg, F. Grid Synchronization with Selective Harmonic Detection Based on Generalized Delayed Signal Superposition. IEEE Trans. Power Electron. 2017, 33, 3938–3949. [Google Scholar] [CrossRef]
- Singh, G.K. Power System Harmonics Research: A Survey. Eur. Trans. Electr. Energy Syst. 2009, 19, 151–172. [Google Scholar] [CrossRef]
- Dou, J.W.; Yang, X.Y.; Yang, X.Z. A Power System Harmonic Detection Method Based on Fractional Wavelet Transform. In Proceedings of the CSEE 2022, Montréal, QC, Canada, 14–19 August 2023; pp. 1–9. [Google Scholar]
- Wen, Y.F.; Yang, W.F.; Wang, R.H.; Xu, W.T.; Ye, X.; Li, T. Review and Prospect of Constructing 100% Renewable Energy Power System. In Proceedings of the CSEE 2022, Montréal, QC, Canada, 14–19 August 2023; pp. 1843–1856. [Google Scholar]
- Peretti, L.; Pathmanathan, M.; Haq, O.; Sahoo, S. Robust Harmonic Detection, Classification and Compensation Method for Electric Drives Based on the Sparse Fft and the Mahalanobis Distance. IET Electr. Power Appl. 2017, 11, 1177–1186. [Google Scholar] [CrossRef] [Green Version]
- Su, T.; Yang, M.; Jin, T.; Flesch, R.C.C. Power Harmonic and Interharmonic Detection Method in Renewable Power Based on Nuttall Double-Window All-Phase Fft Algorithm. IET Renew. Power Gener. 2018, 12, 953–961. [Google Scholar] [CrossRef]
- Li, C.; An, Q. Harmonic Detection Algorithm Based on Kaiser Window. In Proceedings of the 2020 IEEE Conference on Telecommunications, Optics and Computer Science (TOCS), Shenyang, China, 11–13 December 2020. [Google Scholar]
- Chauhan, K.; Venkateswara Reddy, M.; Sodhi, R. A Novel Distribution-Level Phasor Estimation Algorithm using Empirical Wavelet Transform. IEEE Trans. Ind. Electron. 2018, 65, 7984–7995. [Google Scholar] [CrossRef]
- Yang, X.; Xie, W. Research of the Power Harmonic Detection Method Based on Wavelet Packet Transform. In Proceedings of the 2010 International Conference on Measuring Technology & Mechatronics Automation, Changsha, China, 13–14 March 2010. [Google Scholar]
- Tang, Z.G.; Li, Y. Research on Improved Adaptive Parameterless Empirical Wavelet Transform in Transformer High Frequency Partial Discharge Current Noise Suppression. Power Syst. Technol. 2022, 1–12. [Google Scholar]
- Shi, J.; Liu, Z. Harmonic Detection Technology for Power Grids Based on Adaptive Ensemble Empirical Mode Decomposition. IEEE Access 2021, 9, 21218–21226. [Google Scholar] [CrossRef]
- Sun, S.; Pang, Y.; Wang, J.; Zhang, C.; Du, T.; Yu, H. EEMD harmonic detection method based on the new wavelet threshold denoising pretreatment. Power Syst. Prot. Control. 2016, 44, 42–48. [Google Scholar]
- Qin, Y. Fast Implementation of Orthogonal Empirical Mode Decomposition and ITS Application into Harmonic Detection. Chin. J. Mech. Eng. 2008, 21, 93. [Google Scholar] [CrossRef]
- Gu, F.-C.; Chang, H.-C.; Chen, F.-H.; Kuo, C.-C.; Hsu, C.-H. Application of the Hilbert-Huang Transform with Fractal Feature Enhancement on Partial Discharge Recognition of Power Cable Joints. IET Sci. Meas. Technol. 2012, 6, 440–448. [Google Scholar] [CrossRef]
- Afroni, M.J.; Sutanto, D.; Stirling, D. Analysis of nonstationary power-quality waveforms using iterative Hilbert Huang transform and SAX algorithm. IEEE Trans. Power Deliv. 2013, 28, 2134–2144. [Google Scholar] [CrossRef]
- Wang, Z.; Asce, A.G.C.F. Recursive Hilbert-Huang Transform Method for Time-Varying Property Identification of Linear Shear-Type Buildings under Base Excitations. J. Eng. Mech. 2012, 138, 631–639. [Google Scholar] [CrossRef]
- Tong, T.; Zhang, X.Y.; Liu, B.W. Analysis of Harmonic and Interharmonic Detection Based on Fourier-based Synchrosqueezing Transform and Hilbert Transform. Power Syst. Technol. 2019, 43, 4200–4208. [Google Scholar]
- Liang, Z.; Liang, J.; Zhang, L.; Wang, C.; Yun, Z.; Zhang, X. Analysis of Multi-Scale Chaotic Characteristics of Wind Power Based on Hilbert-Huang Transform and Hurst Analysis. Appl. Energy 2015, 159, 51–61. [Google Scholar] [CrossRef]
- Hu, Z.J.; Guo, J.Q.; Yu, M.; Du, Z.; Wang, C. The Studies on Power System Harmonic Analysis Based on Extended Prony Method. In Proceedings of the 2006 International Conference on Power System Technology, Chongqing, China, 22–26 October 2006. [Google Scholar]
- Zygarlicki, J.; Zygarlicka, M.; Mroczka, J.; Latawiec, K.J. A Reduced Prony’s Method in Power-Quality Analysis—Parameters Selection. IEEE Trans. Power Deliv. 2010, 25, 979–986. [Google Scholar] [CrossRef]
- Derin, H. Estimating Components of Univariate Gaussian Mixtures Using Prony’s Method. IEEE Trans. Pattern Anal. Mach. Intell. 1987, PAMI-9, 142–148. [Google Scholar] [CrossRef]
- Trudnowski, D.J.; Johnson, J.M.; Hauer, J.F. Making Prony analysis more accurate using multiple signals. IEEE Trans. Power Syst. 1999, 14, 226–231. [Google Scholar] [CrossRef]
- Wang, X.Y.; Bai, X.M.; Song, C.; Mao, Z.J. APU Exhaust Temperature Prediction Based on EMD-LSTM Model. J. Aerosp. Power 2023, 1–8. [Google Scholar] [CrossRef]
- Li, Z.M.; Xu, M.; Pan, T.H.; Chen, W.H. A harmonic detection method for distributed connected grid system by using wavelet transform and HHT. Power Syst. Prot. Control. 2014, 42, 34–39. [Google Scholar]
- Xiong, G.; Wang, B.; Lu, N.X.; Xia, L.; Zhu, Z.J. Time-Frequency Analysis Method Based on Improved Prony Transform and Its Application in Offshore Wind Turbines. Acta Energ. Sol. Sin. 2022, 43, 280–286. [Google Scholar] [CrossRef]
- Wang, M.H.; Li, K.C.; Liu, C.; Wang, W.; Chen, X.Y. Prony-GSO Combined Harmonic Detection Method Based on VMD De-noising. Electr. Meas. Instrum. 2020, 57, 101–107. [Google Scholar]
- Zhang, Q.; Bian, X.; Xu, X.; Huang, R.; Li, H. Analysis of Influencing Factors on Damping Characteristics of Subsynchronous Oscillation Based on Singular Value Decomposition Prony and Principal Component Regression. Trans. China Electrotech. Soc. 2022, 37, 4364–4376. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Before Denoising SNR | Prony Algorithm | The Proposed Method | |||||||
|---|---|---|---|---|---|---|---|---|---|
| Amplitude /V | Frequency /Hz | Phase/° | Attenuation Factor | Amplitude /V | Frequency /Hz | Phase/° | Attenuation Factor | Dominant Factor | |
| 5 dB | 368.3924 | 779.0909 | 34.1670 | −538.5595 | 50.2379 | 49.9946 | 71.7320 | −0.1279 | 392.7905 |
| 149.8316 | 793.3605 | 179.6763 | −135.9869 | 24.8951 | 149.9963 | 107.1586 | −0.3297 | 75.5083 | |
| 59.1708 | 30.6002 | 102.8747 | −141.3244 | 8.7083 | 137.8659 | 141.9504 | −0.1860 | 47.3565 | |
| 50.6543 | 50.0278 | 70.6035 | −0.1404 | 6.1268 | 349.9532 | 160.7258 | −1.2100 | 5.0635 | |
| 36.9181 | 149.7132 | 123.6631 | −4.0898 | 2.5826 | 319.0668 | 44.8012 | −66.7384 | 0.0522 | |
| 31.0460 | 287.0820 | 143.5194 | −122.5444 | 1.7748 | 343.3577 | 170.2391 | −15.2113 | 0.1167 | |
| 23.1498 | 355.5101 | 92.8171 | −67.1172 | 1.5152 | 198.5234 | 109.4213 | −54.4115 | 0.0278 | |
| 22.8510 | 188.2917 | 171.7149 | −53.1641 | 1.4871 | 258.8410 | 6.7160 | −72.0078 | 0.0207 | |
| 10 dB | 292.7002 | 184.8522 | 153.7994 | −740.6918 | 50.4065 | 49.9963 | 72.3137 | −0.1008 | 500.0645 |
| 83.3545 | 734.6794 | 103.8009 | −411.8509 | 25.1007 | 150.0043 | 107.9841 | −0.2800 | 89.6454 | |
| 52.8242 | 49.9528 | 74.4297 | −0.3731 | 8.6343 | 137.9901 | 143.9876 | −1.7352 | 5.0336 | |
| 41.6969 | 182.4927 | 29.8205 | −595.6980 | 6.2607 | 350.0049 | 160.4478 | −0.6625 | 9.7520 | |
| 40.7923 | 150.1790 | 99.2792 | −4.8672 | 6.3925 | 512.2301 | 14.6780 | −898.9631 | 0.0071 | |
| 11.2334 | 350.1351 | 163.7297 | −12.0463 | 4.0890 | 327.4281 | 52.4083 | −227.2411 | 0.0180 | |
| 9.2335 | 135.9086 | 122.6909 | −43.8386 | 2.9818 | 478.3799 | 164.9383 | −413.5335 | 0.0072 | |
| 6.4724 | 240.6855 | 1.8089 | −49.8908 | 1.3560 | 929.1278 | 46.8287 | −195.8049 | 0.0069 | |
| 20 dB | 85.2741 | 579.5170 | 54.9866 | −620.8631 | 50.3869 | 49.9994 | 72.0592 | −0.0903 | 557.9945 |
| 50.9132 | 50.0017 | 71.9242 | −0.1827 | 25.0419 | 149.9997 | 108.0167 | −0.2814 | 88.9904 | |
| 37.7624 | 121.4600 | 40.8577 | −171.2520 | 8.5718 | 138.0054 | 143.8190 | −1.5998 | 5.3580 | |
| 27.2627 | 150.0270 | 106.7519 | −0.9241 | 6.3054 | 350.0015 | 160.4092 | −0.4510 | 13.9809 | |
| 17.0381 | 138.8344 | 58.7591 | −105.0894 | 1.4600 | 113.8934 | 180.0000 | −586.8984 | 0.0107 | |
| 11.6107 | 383.2363 | 94.7416 | −118.2871 | 0.6265 | 103.0310 | 38.6674 | −716.9492 | 0.0009 | |
| 7.3542 | 349.9924 | 162.0018 | −1.5335 | 0.6158 | 803.2629 | 61.8563 | −808.0462 | 0.0008 | |
| 3.9676 | 349.7109 | 146.4665 | −63.7995 | 0.4230 | 457.5418 | 90.0185 | −303.4712 | 0.0014 | |
| 30 dB | 49.8536 | 50.0016 | 71.8437 | −0.0719 | 50.3943 | 49.9998 | 72.0175 | −0.0937 | 537.8260 |
| 24.6096 | 149.9883 | 107.9125 | −0.5973 | 24.9830 | 150.0001 | 107.9953 | −0.3016 | 82.8349 | |
| 14.1595 | 545.9081 | 107.3173 | −451.7063 | 8.4957 | 137.9972 | 144.1354 | −1.5331 | 5.5415 | |
| 11.9603 | 137.9193 | 148.3649 | −5.7621 | 6.2310 | 350.0006 | 160.1573 | −0.3791 | 16.4363 | |
| 5.9992 | 349.9786 | 161.4551 | −0.4599 | 1.4133 | 169.9994 | 102.9522 | −414.4383 | 0.0034 | |
| 4.5662 | 374.9733 | 92.9159 | −235.3819 | 0.2308 | 68.4535 | 174.9564 | −100.4966 | 0.0023 | |
| 2.1265 | 184.1879 | 97.0321 | −76.6287 | 0.1756 | 105.6480 | 174.5260 | −100.9045 | 0.0017 | |
| 0.8449 | 49.7807 | 152.5392 | −50.4207 | 0.1705 | 350.6978 | 35.1884 | −102.1557 | 0.0017 | |
| Before Denoising SNR | Amplitude /V | Frequency /Hz | Phase/° | Amplitude, Frequency and Phase Errors/% |
|---|---|---|---|---|
| 5 dB | 50.2379 | 49.9946 | 71.7320 | 0.3216/0.0108/0.3722 |
| 24.8951 | 149.9963 | 107.1586 | 0.4196/0.0025/0.7791 | |
| 8.7083 | 137.8659 | 141.9504 | 2.4506/0.0972/1.4233 | |
| 6.1268 | 349.9532 | 160.7258 | 1.1806/0.0134/0.3282 | |
| 10 dB | 50.4065 | 49.9963 | 72.3137 | 0.0129/0.0074/0.4357 |
| 25.1007 | 150.0043 | 107.9841 | 0.4028/0.0029/0.0147 | |
| 8.6343 | 137.9901 | 143.9876 | 1.5800/0.0072/0.0086 | |
| 6.2607 | 350.0049 | 160.4478 | 0.9790/0.0014/0.1547 | |
| 20 dB | 50.3869 | 49.9994 | 72.0592 | 0.0260/0.0012/0.0822 |
| 25.0419 | 149.9997 | 108.0167 | 0.1676/0.0002/0.0155 | |
| 8.5718 | 138.0054 | 143.8190 | 0.8447/0.0039/0.1257 | |
| 6.3054 | 350.0015 | 160.4092 | 1.7000/0.0004/0.1306 | |
| 30 dB | 50.3943 | 49.9998 | 72.0175 | 0.0113/0.0004/0.0243 |
| 24.9830 | 150.0001 | 107.9953 | 0.0680/0.0001/0.0044 | |
| 8.4957 | 137.9972 | 144.1354 | 0.0506/0.0020/0.0940 | |
| 6.2310 | 350.0006 | 160.1573 | 0.5000/0.0002/0.0267 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, J.; Liu, S. A Harmonic and Interharmonic Detection Method for Power Systems Based on Enhanced SVD and the Prony Algorithm. Appl. Sci. 2023, 13, 7558. https://doi.org/10.3390/app13137558
Gong J, Liu S. A Harmonic and Interharmonic Detection Method for Power Systems Based on Enhanced SVD and the Prony Algorithm. Applied Sciences. 2023; 13(13):7558. https://doi.org/10.3390/app13137558
Chicago/Turabian StyleGong, Junsong, and Sanjun Liu. 2023. "A Harmonic and Interharmonic Detection Method for Power Systems Based on Enhanced SVD and the Prony Algorithm" Applied Sciences 13, no. 13: 7558. https://doi.org/10.3390/app13137558
APA StyleGong, J., & Liu, S. (2023). A Harmonic and Interharmonic Detection Method for Power Systems Based on Enhanced SVD and the Prony Algorithm. Applied Sciences, 13(13), 7558. https://doi.org/10.3390/app13137558