
Competing Failure Modeling for Systems under Classified Random Shocks and Degradation

Abstract
:1. Introduction
- (1)
- The cumulative shock model: This model considers that every shock will cause damage, and as soon as the cumulative damage exceeds the threshold, the hard failure occurs.
- (2)
- The extreme shock model: Hard failure occurs when the size of any shock exceeds a specific threshold in this model.
- (3)
- The m-shock model: This model holds that failure occurs when the m-shock sizes are greater than a threshold.
- (4)
- The run shock model: Similar to the extreme model and the m-shock model, it fails when a run of shocks’ sizes exceeds the threshold.
- (5)
- The δ shock model: Time lag is selected as the index. Failure occurs when the time lag between two successive shocks is smaller than a threshold.
2. System Description and Notation
2.1. System Description
2.2. Notation
| Overall degradation | |
| Pure degradation | |
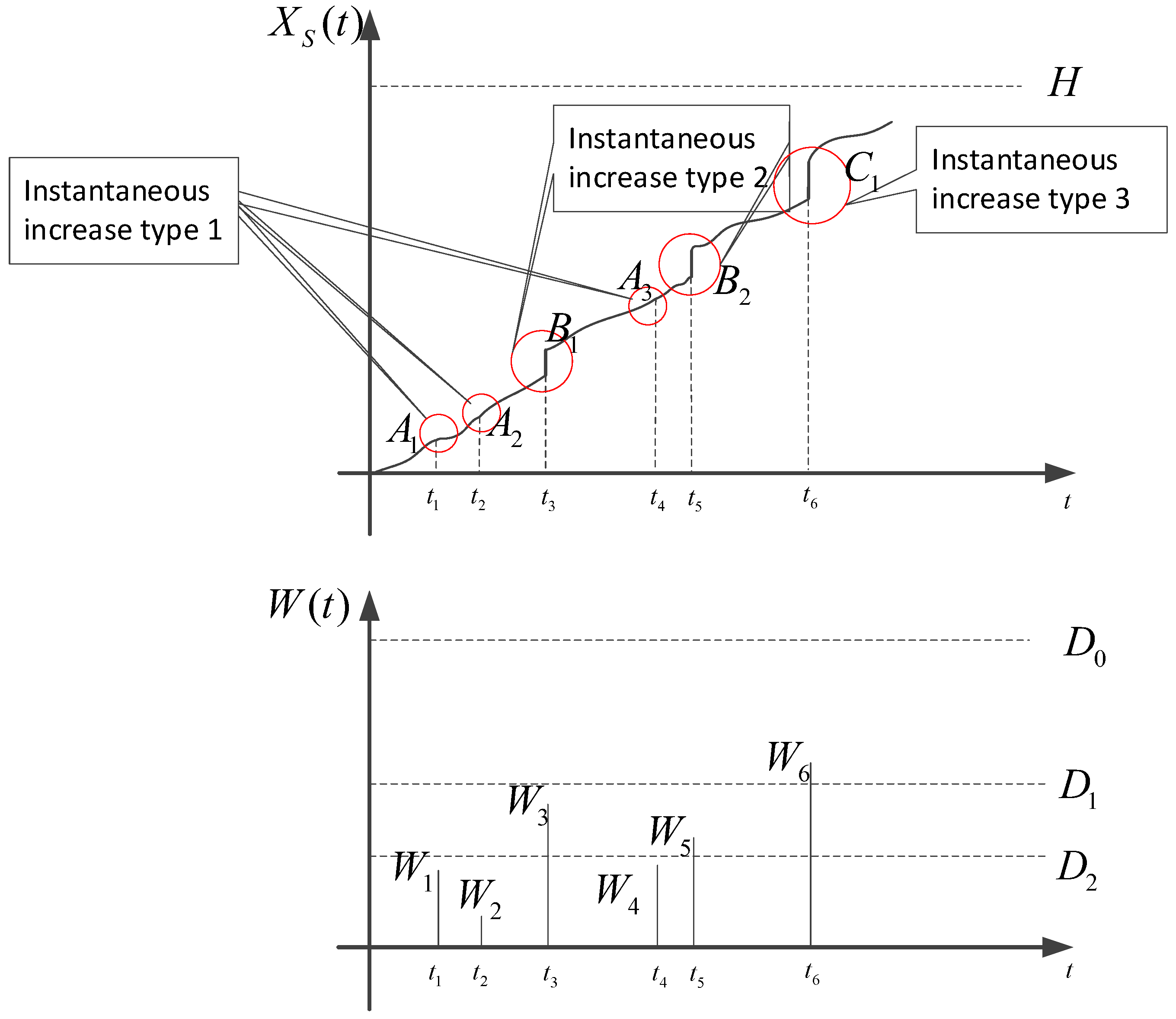
| Degradation increment caused by external random shocks | |
| Wi | Size of the ith random shock |
| Ai Bj Ck | Three types of degradation increments, which are i.i.d. random variables |
| rn | Rate of shock type n |
| Poisson process n with rate | |
| D0 | Failure threshold for hard risk mode |
| D1 | Degradation increase threshold 1 |
| D2 | Degradation increase threshold 2 |
| Cumulative distribution function (CDF) of | |
| G(x,t) | Cumulative distribution function (CDF) of |
| Probability distribution function (PDF) of the sum of m i.i.d. Bj and n Ck | |
| Cumulative distribution function (CDF) of Wi | |
| RH | Survival probability for hard risk mode |
| System reliability probability (abbreviated by SRP) | |
| Competing failure probability (abbreviated by CFP) | |
| Modified system reliability probability (abbreviated by MSRP) | |
| Modified competing failure probability (abbreviated by MCFP) |
3. Modeling for Risk Modes
3.1. Modeling for Soft Failure
3.2. Modeling for Hard Failure
4. Reliability Assemble
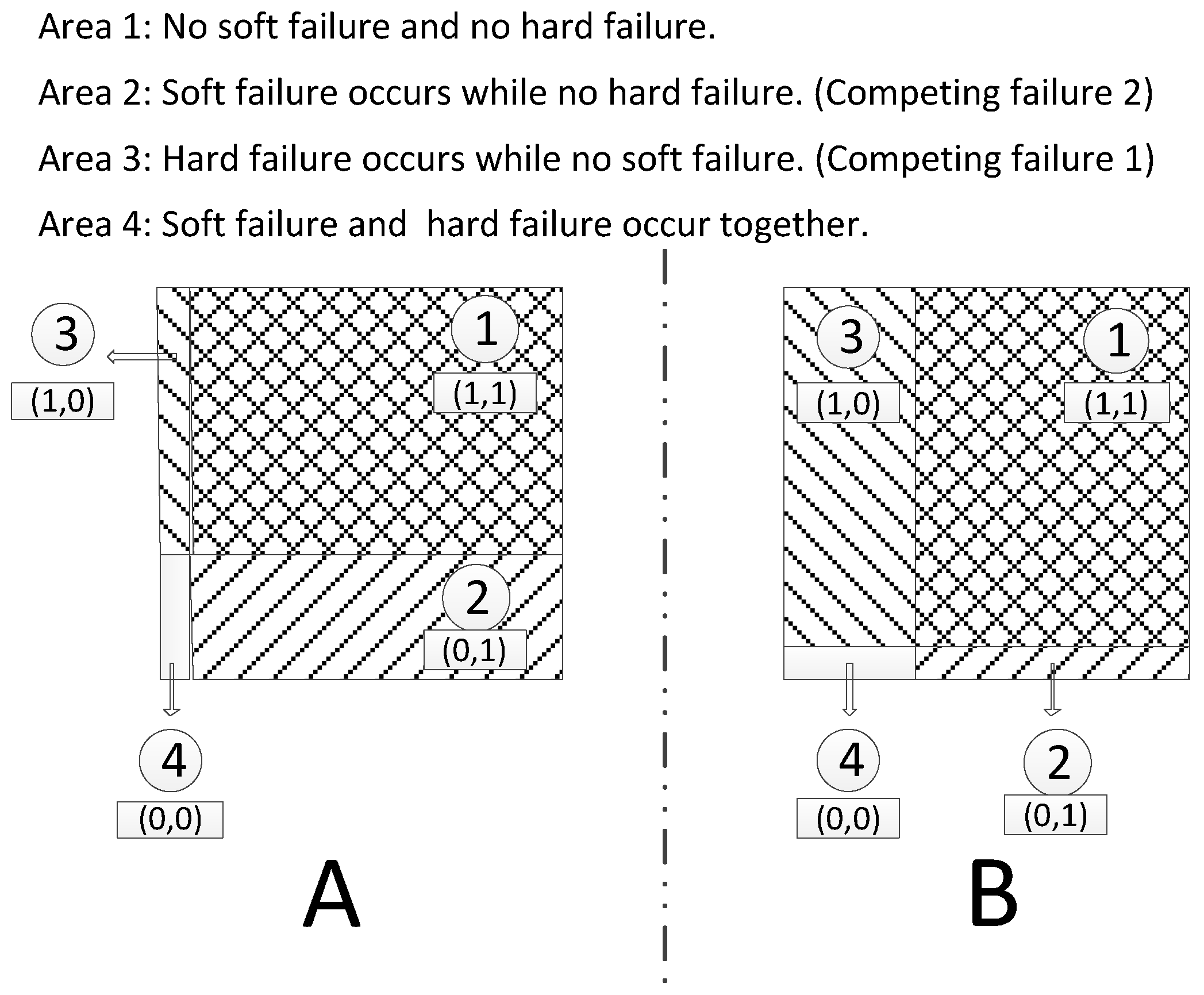
4.1. System Reliability and Competing Failure Analysis
4.2. Deriving of the Modified Probability
5. Numerical Case: An MEMS Application
6. Conclusions and Summary
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, W.; Pham, H. Reliability modeling of multi-state degraded systems with multi-competing failures and random shocks. IEEE Trans. Reliab. 2005, 54, 297–303. [Google Scholar] [CrossRef]
- Peng, H.; Feng, Q.; Coit, D. Reliability and maintenance modeling for systems subject to multiple dependent competing failure processes. IIE Trans. 2011, 43, 12–22. [Google Scholar] [CrossRef]
- Rafiee, K.; Feng, Q.; Coit, D. Reliability modeling for dependent competing failure processed with changing degradation rate. IIE Trans. 2013, 46, 483–496. [Google Scholar] [CrossRef]
- Jiang, L.; Feng, Q.; Coit, D. Reliability and Maintenance Modeling for Dependent Competing Failure Processes with Shifting Failure Thresholds. IEEE Trans. Reliab. 2012, 61, 932–948. [Google Scholar] [CrossRef]
- Pham, H. Safety and Risk Modeling and Its Applications; Springer: London, UK, 2011; pp. 197–218. [Google Scholar]
- Jiang, L.; Feng, Q.; Coit, D. Reliability assessment of competing risks with generalized mixed shock models. Reliab. Eng. Syst. Saf. 2017, 159, 1–11. [Google Scholar]
- Nicolai, R.; Dekker, R.; Noortwijk, J. A comparison of models for measurable deterioration: An application to coatings on steel structures. Reliab. Eng. Syst. Saf. 2007, 92, 1635–1650. [Google Scholar] [CrossRef]
- Si, X.; Zhou, D. A generalized result for degradation model-based reliability estimation. IEEE Trans. Reliab. 2014, 11, 632–637. [Google Scholar] [CrossRef]
- Xu, D.; Wei, Q.; Chen, Y. Reliability prediction using physics-statistics-based degradation model. IEEE Trans. Compon. 2015, 5, 1573–1581. [Google Scholar]
- Ma, J.; Yuan, D. Accelerated storage life evaluation of FOG based on drift Brownian movement. J. Chin. Inert. Technol. 2010, 8, 756–760. [Google Scholar]
- Ren, S.; Zuo, H.; Bai, F. Real-time performance reliability prediction for civil aviation engines based on Brownian motion with drift. J. Aerosp. Power 2009, 24, 2796–2801. [Google Scholar]
- Cai, J.; Ren, S. Research on Reliability Prediction for Roller-slide Based on Brownian Motion with Drift. China Mech. Eng. 2012, 23, 1408–1412. [Google Scholar]
- Bai, Z.; Zhao, Y.; Chen, J. Dynamics analysis of planar mechanical system considering revolute clearance joint wear. Tribol. Int. 2013, 64, 85–95. [Google Scholar] [CrossRef]
- Haneef, M.D.; Randall, R.B.; Smith, W.A.; Peng, Z. Vibration and wear prediction analysis of IC engine bearings by numerical simulation. Wear 2017, 384, 15–27. [Google Scholar] [CrossRef]
- Jones, N. Slamming damage. J. Ship Res. 1973, 17, 80–86. [Google Scholar] [CrossRef]
- Nandu, V.; Marimuthu, P. Fracture characteristics of asymmetric high contact ratio spur gear based on strain energy release rate. Eng. Fail. Anal. 2022, 134, 106036. [Google Scholar] [CrossRef]
- Miyakawa, M. Analysis of incomplete data in competing risks model. IEEE Trans. Reliab. 1984, 33, 293–296. [Google Scholar] [CrossRef]
- Ye, Z.; Tang, L.; Xu, H. A distribution-based system reliability model under extreme shocks and natural degradation. IEEE Trans. Reliab. 2011, 60, 246–256. [Google Scholar] [CrossRef]
- Wang, X.; Wang, B.; Niu, Y.; He, Z. Reliability Modeling of Products with Self-Recovery Features for Competing Failure Processes in Whole Life Cycle. Appl. Sci. 2023, 13, 4800. [Google Scholar] [CrossRef]
- Zheng, M.; Lin, R.; Yu, W. Competing risks data analysis under the accelerated failure time model with missing cause of failure. Ann. Inst. Stat. Math. 2016, 68, 855–876. [Google Scholar] [CrossRef]
- Luo, W.; Zhang, C.; Chen, X. Accelerated reliability demonstration under competing failure modes. Reliab. Eng. Syst. Saf. 2015, 136, 75–84. [Google Scholar] [CrossRef]
- Song, S.; Coit, D.; Feng, Q. Reliability for systems of degrading components with distinct component shock sets. Reliab. Eng. Syst. Saf. 2014, 132, 115–124. [Google Scholar] [CrossRef]
- Song, S.; Coit, D.; Feng, Q. Reliability Analysis for Multi-Component Systems Subject to Multiple Dependent Competing Failure Processes. IEEE Trans. Reliab. 2014, 63, 331–345. [Google Scholar] [CrossRef]
- Rafiee, K.; Feng, Q.; Coit, D. Condition-based maintenance for repairable deteriorating systems subject to a generalized mixed shock model. IEEE Trans. Reliab. 2015, 64, 1164–1174. [Google Scholar] [CrossRef]
- Rossi, A.; Bocchetta, G.; Botta, F.; Scorza, A. Accuracy Characterization of a MEMS Accelerometer for Vibration Monitoring in a Rotating Framework. Appl. Sci. 2023, 13, 5070. [Google Scholar] [CrossRef]
- Chappel, E. Dry Test Methods for Micropumps. Appl. Sci. 2022, 12, 12258. [Google Scholar] [CrossRef]
- Tanner, D.; Dugger, M. Wear mechanisms in a reliability methodology. Proc. Soc. Photo-Ophical Instrum. Eng. 2003, 4980, 22–40. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values | Sources |
|---|---|---|
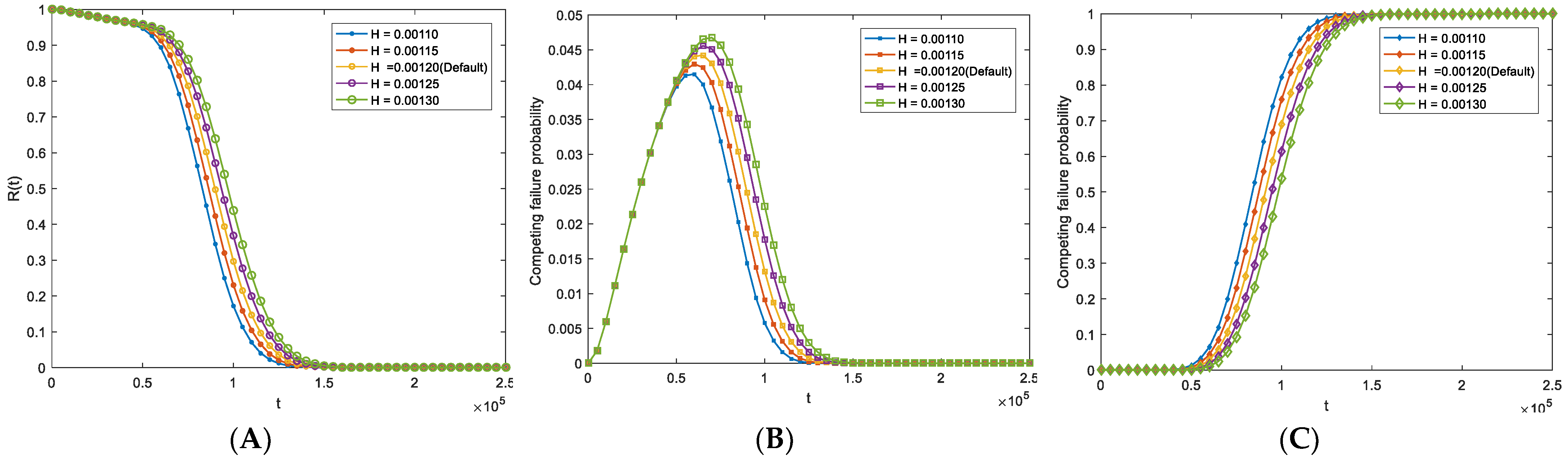
| H | 0.00125 | Tanner [27] |
| D0 | 1.5 | Tanner [27] |
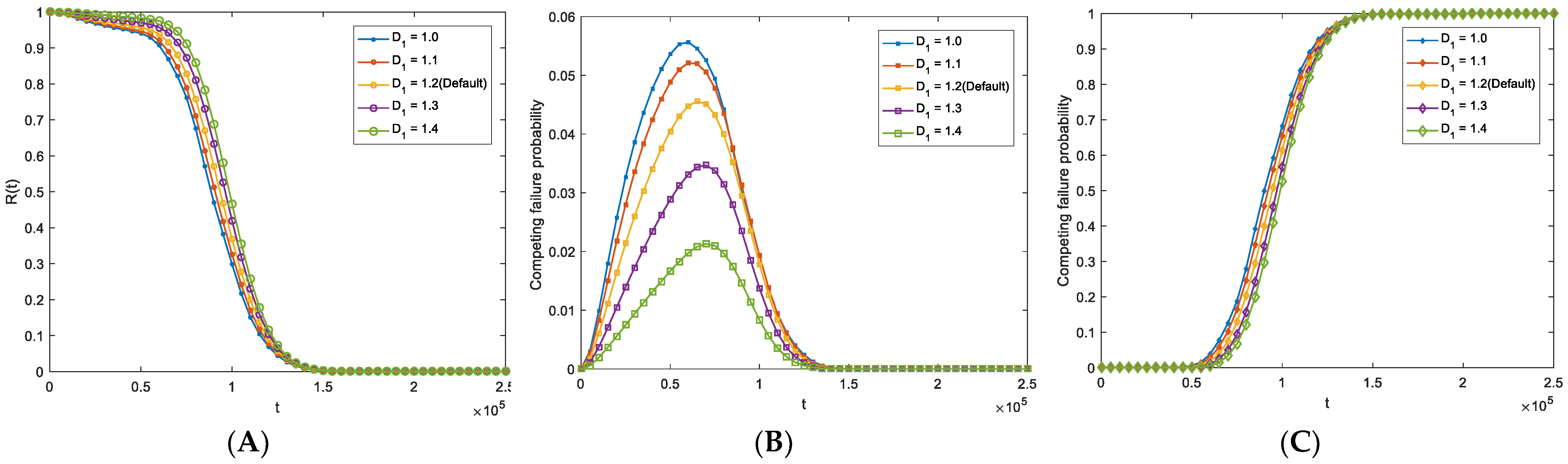
| D1 | 1.2 | Assumption |
| D2 | 1.0 | Assumption |
| φ | 0 | Tanner [27] |
| β | ~N (μβ, σβ2) μβ = 8.4823 × 10−9 μm3 σβ = 6.0016 × 10−10 μm3 | Tanner [2] |
| Wi | ~N (μW, σW2) μW = 1.2 Gpa σW = 0.2 Gpa | Jiang L. [4] |
| λ | 5 × 10 − 5/revolution | Jiang L. [4] |
| Bi | ~N (μB, σB2) μB = 1.2 × 10−4 μm3 σB = 2 × 10−10 μm3 | Assumption |
| Ci | ~N (μC, σC2) μC = 1.8×10−4 μm3 σC = 2×10−10 μm3 | Assumption |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Zhang, K.; Pang, H. Competing Failure Modeling for Systems under Classified Random Shocks and Degradation. Appl. Sci. 2023, 13, 7490. https://doi.org/10.3390/app13137490
Liu J, Zhang K, Pang H. Competing Failure Modeling for Systems under Classified Random Shocks and Degradation. Applied Sciences. 2023; 13(13):7490. https://doi.org/10.3390/app13137490
Chicago/Turabian StyleLiu, Jingyi, Kaichao Zhang, and Huan Pang. 2023. "Competing Failure Modeling for Systems under Classified Random Shocks and Degradation" Applied Sciences 13, no. 13: 7490. https://doi.org/10.3390/app13137490
APA StyleLiu, J., Zhang, K., & Pang, H. (2023). Competing Failure Modeling for Systems under Classified Random Shocks and Degradation. Applied Sciences, 13(13), 7490. https://doi.org/10.3390/app13137490