




Considerations for the Design of a Wheelchair Dynamometer Concerning a Dedicated Braking System

 ,
,  ,
,  , and
, and 
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
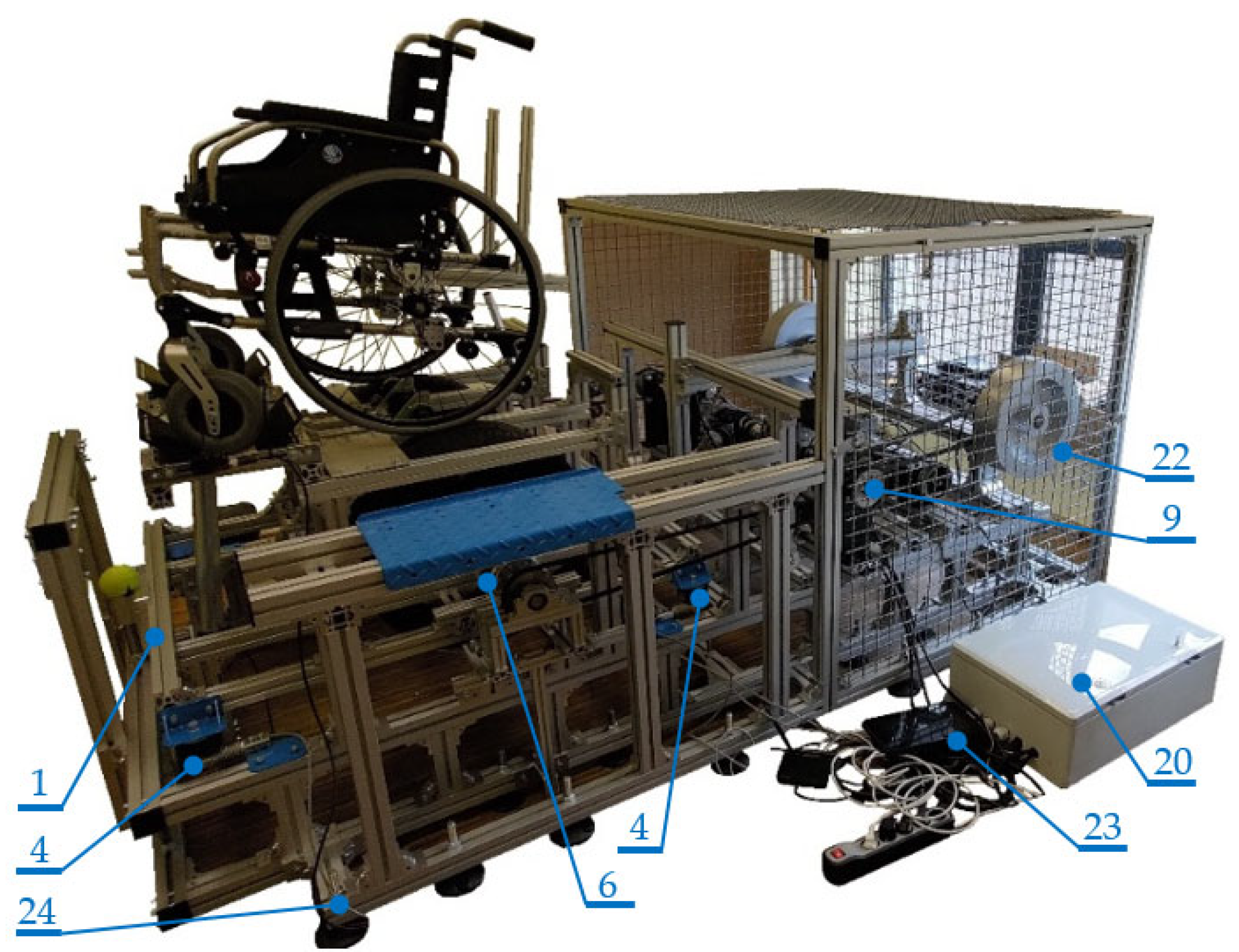
2. Materials and Methods
2.1. Measurement Methodology
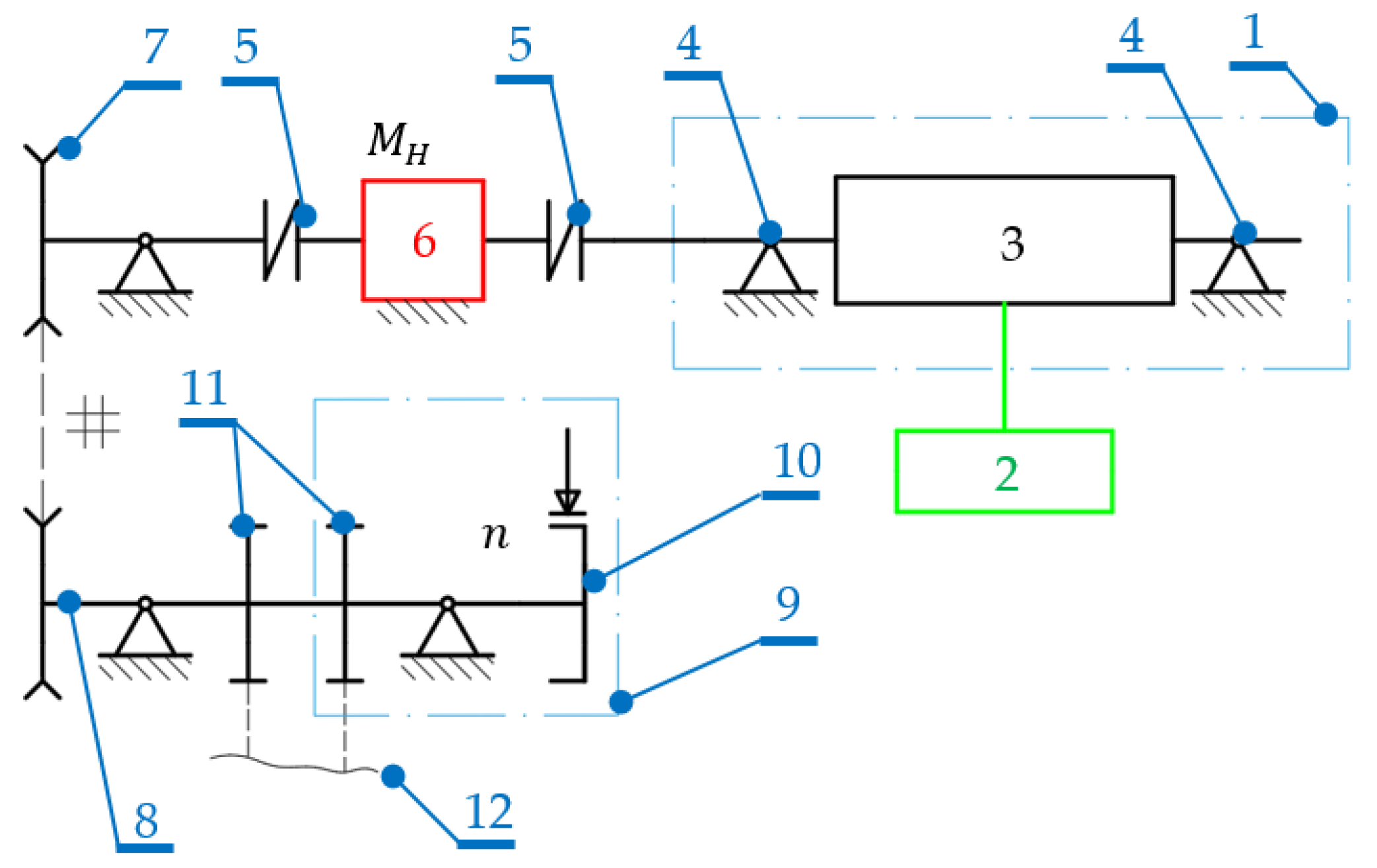
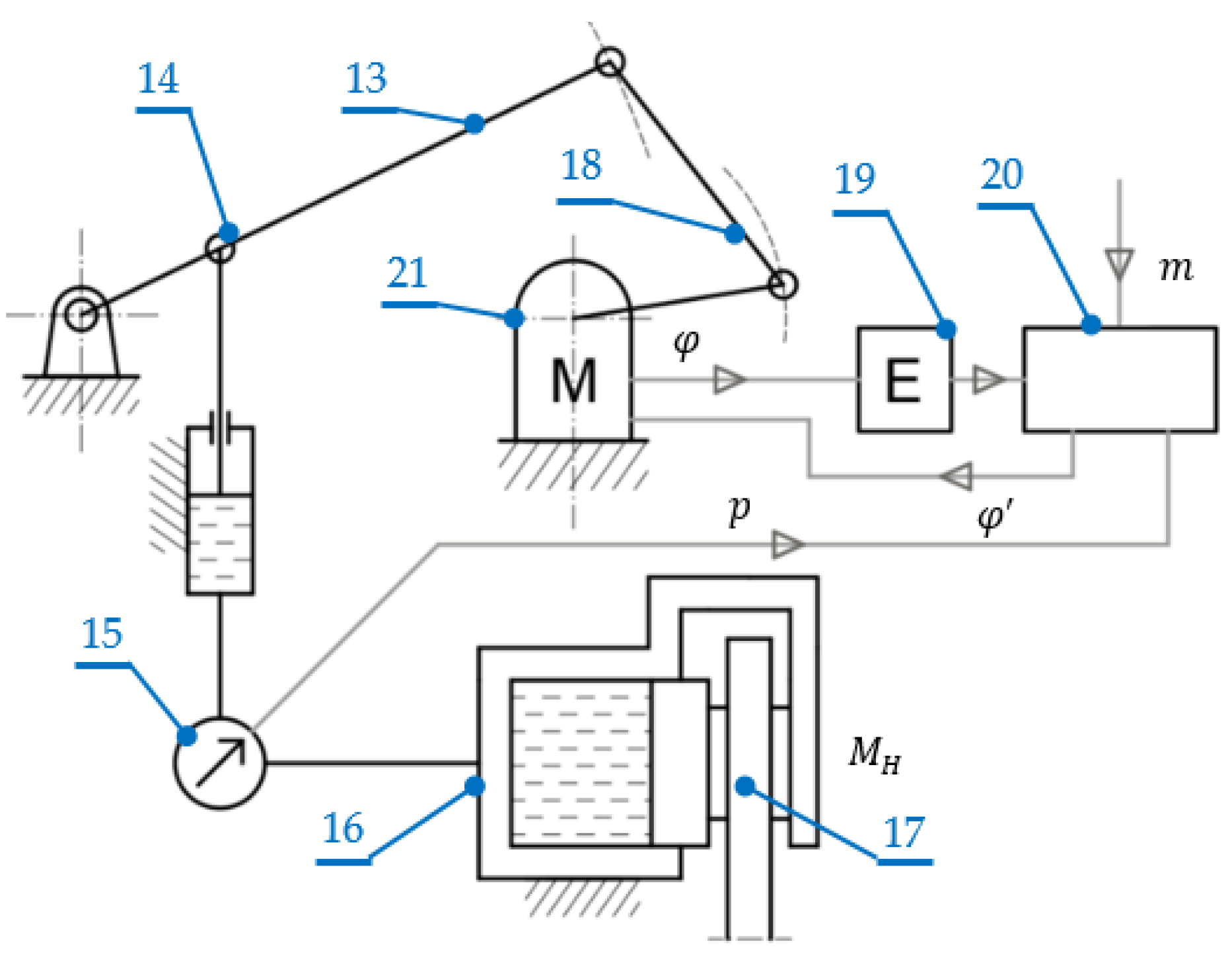
2.2. Selection of the Electric Drive and the Control System Design
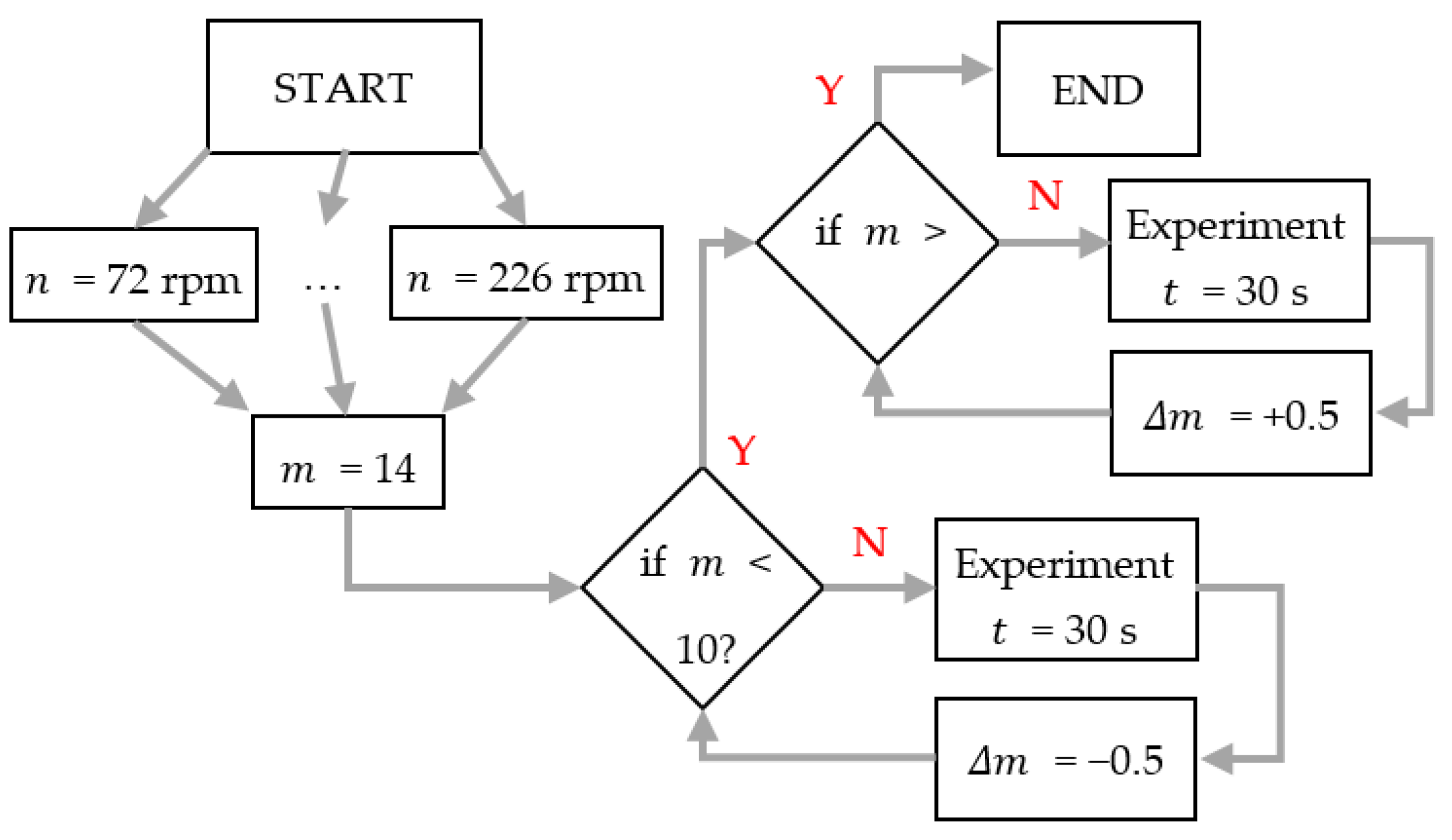
2.3. Measurement Methodology
3. Results and Discussion
4. Summary
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wieczorek, B.; Kukla, M.; Warguła, Ł.; Górecki, J.; Berdychowski, M. Design and engineering of a test stand for testing human-wheelchair anthropotechnical systems. In Research on the Biomechanics of Manual Wheelchair Drive for Innovative Manual and Hybrid Drives, 1st ed.; Wieczorek, B., Ed.; Publishing House Kazimierz Pulaski University of Technology and Humanities: Radom, Poland, 2019; No. 240; pp. 41–51. [Google Scholar]
- Kukla, M.; Wieczorek, B.; Warguła, Ł.; Górecki, J. The determination of the parameters of wheelchair driving with the use of a test bench. AUTOBUSY—Tech. Eksploat. Syst. Transp. 2019, 20, 229–302. [Google Scholar] [CrossRef]
- Kinkaid, N.M.; O’Reilly, O.M.; Papadopoulos, P. Automotive disc brake squeal. J. Sound Vib. 2003, 267, 105–166. [Google Scholar] [CrossRef]
- Song, W.; Gweon, J.; Park, J.S.; Kim, J.; Kim, J.; Jang, H. Role of contact plateaux on velocity-dependent friction of brake friction composite with steel fibres. Tribol. Int. 2022, 171, 5. [Google Scholar] [CrossRef]
- Yongchang, D.; Wang, W. Squeal analysis of a modal-parameter-based rotating disc brake model. Int. J. Mech. 2017, 131–132, 1049–1060. [Google Scholar] [CrossRef]
- Crolla, D.A.; Lang, A.M. Brake noise and vibration—The state of the art. In Vehicle Tribology; Dowson, D., Taylor, C.M., Godet, M., Eds.; Elsevier: Leeds, UK, 1991; Volume 18, pp. 165–174. ISBN 0-444-88796-2. [Google Scholar] [CrossRef]
- Ouyang, H.; Mottershead, J.E.; Cartmell, M.P.; Friswell, M.I. Friction-induced parametric resonances in discs: Effect of a negative friction-velocity relationship. J. Sound Vib. 1998, 209, 251–264. [Google Scholar] [CrossRef]
- Jang, H.; Kim, S.J. Brake friction materials. In Polymer Tribology; Sinha, S.K., Briscoe, B.J., Eds.; Imperial College Press: London, UK, 2009; pp. 506–532. ISBN 978-1848162020. [Google Scholar] [CrossRef]
- Ouyang, H.; Mottershead, J.E.; Cartmell, M.P.; Friswell, M.I. In-plane stick–slip vibration on the surface of a flexible disc clamped between elastic sliders. In Proceedings of the 16th Biennial Conference on Vibration and Noise, Sacramento, CA, USA, 14–17 September 1997. [Google Scholar] [CrossRef]
- Tretsiak, D.V.; Kliauzovich, S.V.; Augsburg, K.; Sendler, J.; Ivanov, V.G. Research in hydraulic brake components and operational factors influencing the hysteresis losses. Proc. Inst. Mech. Eng. D J. Automob. Eng. 2008, 222, 1633–1645. [Google Scholar] [CrossRef] [Green Version]
- Tao, J.J.; Chang, H.T. A system approach to the drag performance of disc brake caliper. In Proceedings of the 21st Annual Brake Colloquium & Exhibition, Hollywood, Fl, USA, 6–8 October 2003. [Google Scholar] [CrossRef]
- Kikovic, B. Defining the optional geometry of proportional valve using computer simulation. In Proceedings of the International Conference on the Computer as a Tool (EUROCON 2005), New York, NY, USA, 21–24 November 2005; pp. 1271–1274. [Google Scholar] [CrossRef]
- Lee, J.C.; Shin, H.M.; Jo, H.Y. A study of the effects of entrained air in a hydraulic brake actuator. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2008, 222, 285–292. [Google Scholar] [CrossRef]
- Baumgartner, H.; Theiss, A. Comparison of pneumatic and hydraulic disk brakes for heavy duty application. In Proceedings of the International Truck & Bus Meeting & Exposition, Detroit, Michigan, USA, 29 October–1 November 1990. [Google Scholar] [CrossRef]
- Wang, X.D.; Li, C.; Wang, X. Dynamic characteristics analysis of brake system for heavy-duty, off-highway vehicle. J. Commer. Veh. 2004, 113, 278–288. [Google Scholar] [CrossRef]
- Galaktionov, A.M.; Poluektov, V.V. Anti-lock braking system and operation of brake drive. Automot. Ind. 1990, 5, 13. (In Russian) [Google Scholar]
- Ren, L.; Chen, H.; Wang, T. Dynamic system identification of Audi disc brake under anti-lock condition. In Proceedings of the IEEE International Vehicle Electronics Conference, New York, NY, USA, 26–28 September 1999; pp. 78–81. [Google Scholar]
- Dupuis, V. Development of new drum brake. In Proceedings of the 25th International µ-Symposium—Brake Conference, Bad Neuenahr, Germany, 17–19 June 2005; pp. 95–101. [Google Scholar]
- Guo, J.; Wang, Y.; Yin, X.; Liu, P.; Hou, Z.; Zhao, D. Study on the Control Algorithm of Automatic Emergency Braking System (AEBS) for Commercial Vehicle Based on Identification of Driving Condition. Machines 2022, 10, 895. [Google Scholar] [CrossRef]
- Viselga, G.; Ugnenko, E.B.; Uzhviieva, E.N.; Tymchenko, O.N.; Sorochuk, N.I. Simulation modeling of the automobile braking system performance. In Proceedings of the IOP Conference Series Materials Science and Engineering, Kharkiv, Ukraine, 11–14 May 2021. [Google Scholar] [CrossRef]
- Kukla, M.; Wieczorek, B.; Warguła, Ł.; Rybarczuk, D.; Kończak, M. Wheelchair Dynamometer (Original Title in Polish: Hamownia do Wózków Inwalidzkich). Patent P.444414 Pat/2422 14 April 2023. [Google Scholar]
- Zhang, Y.; Wang, L.; Zhang, H.; Iwasaki, M. Optimal Intelligent Chassis Layout Design Framework Based on Particle Swarm Optimization and Robust Finite-Frequency H∞ Control. IEEE Trans. Veh. Technol. 2023, 20, 1–16. [Google Scholar] [CrossRef]
- Xiu, Y.; Wang, X.; Li, H.; Lu, W.; Nguyen, V.; Jiang, J.; Li, S. Comparative Vibration Isolation Assessment of Two Seat Suspension Models with Different Negative Stiffness Structure. SAE Int. J. Veh. Dyn. Stab. NVH 2023, 7, 99–112. [Google Scholar] [CrossRef]
- Li, C.; Zhuo, G.; Tang, C.; Xiong, L.; Tian, W.; Qiao, L.; Cheng, Y.; Duan, Y. A review of electro-mechanical brake (EMB) system: Structure, control and application. Sustainability 2023, 15, 4514. [Google Scholar] [CrossRef]
- de Carvalho Pinheiro, H.; Carello, M. Design and Validation of a High-Level Controller for Automotive Active Systems. SAE Int. J. Veh. Dyn. Stab. NVH 2023, 7, 83–98. [Google Scholar] [CrossRef]
- Senyi, L.; Chunhua, L. Virtual-Vector based Robust Predictive Current Control for Dual Three-Phase PMSM. IEEE Trans. Ind. Electron. 2021, 68, 2048–2058. [Google Scholar] [CrossRef]
- Shyrokau, B.; Wang, D.; Augsburg, K.; Ivanov, V. Modelling and control of hysteresis: Characterised brake processes. In Proceedings of the EuroBrake 2012 Conference Proceeding, Dresden, Germany, 16–18 April 2012. [Google Scholar]
- Tretsiak, D.; Ivanov, V. Investigation on Hysteresis Losses into Disc Brake Gear for Heavy Vehicles. In Proceedings of the 24th Annual Brake Colloquium and Exhibition, Grapevine, TX, USA, 8–11 October 2006. [Google Scholar] [CrossRef]
- Shyrokau, B.; Wang, D.; Augsburg, K.; Ivanov, V. Vehicle dynamics with brake hysteresis. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2012, 227, 139–150. [Google Scholar] [CrossRef] [Green Version]
- Pawełko, P. Proportional Control in Base of Drive and Hydraulic Control: Laboratory Exercises; West Pomeranian University of Technology: Szczecin, Poland, 2021. [Google Scholar]
- Ismail, M.; Ikhouane, F.; Rodellar, J. The Hysteresis Bouc-Wen Model, a Survey. Arch. Comput. Methods Eng. 2009, 16, 161–188. [Google Scholar] [CrossRef]
- Senyi, L.; Chunhua, L.; Yongcan, H.; Yang, X. Direct Modulation Pattern Control for Dual Three-Phase PMSM Drive System. IEEE Trans. Ind. Electron. 2022, 69, 110–120. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kończak, M.; Kukla, M.; Warguła, Ł.; Rybarczyk, D.; Wieczorek, B. Considerations for the Design of a Wheelchair Dynamometer Concerning a Dedicated Braking System. Appl. Sci. 2023, 13, 7447. https://doi.org/10.3390/app13137447
Kończak M, Kukla M, Warguła Ł, Rybarczyk D, Wieczorek B. Considerations for the Design of a Wheelchair Dynamometer Concerning a Dedicated Braking System. Applied Sciences. 2023; 13(13):7447. https://doi.org/10.3390/app13137447
Chicago/Turabian StyleKończak, Michał, Mateusz Kukla, Łukasz Warguła, Dominik Rybarczyk, and Bartosz Wieczorek. 2023. "Considerations for the Design of a Wheelchair Dynamometer Concerning a Dedicated Braking System" Applied Sciences 13, no. 13: 7447. https://doi.org/10.3390/app13137447
APA StyleKończak, M., Kukla, M., Warguła, Ł., Rybarczyk, D., & Wieczorek, B. (2023). Considerations for the Design of a Wheelchair Dynamometer Concerning a Dedicated Braking System. Applied Sciences, 13(13), 7447. https://doi.org/10.3390/app13137447