1. Introduction
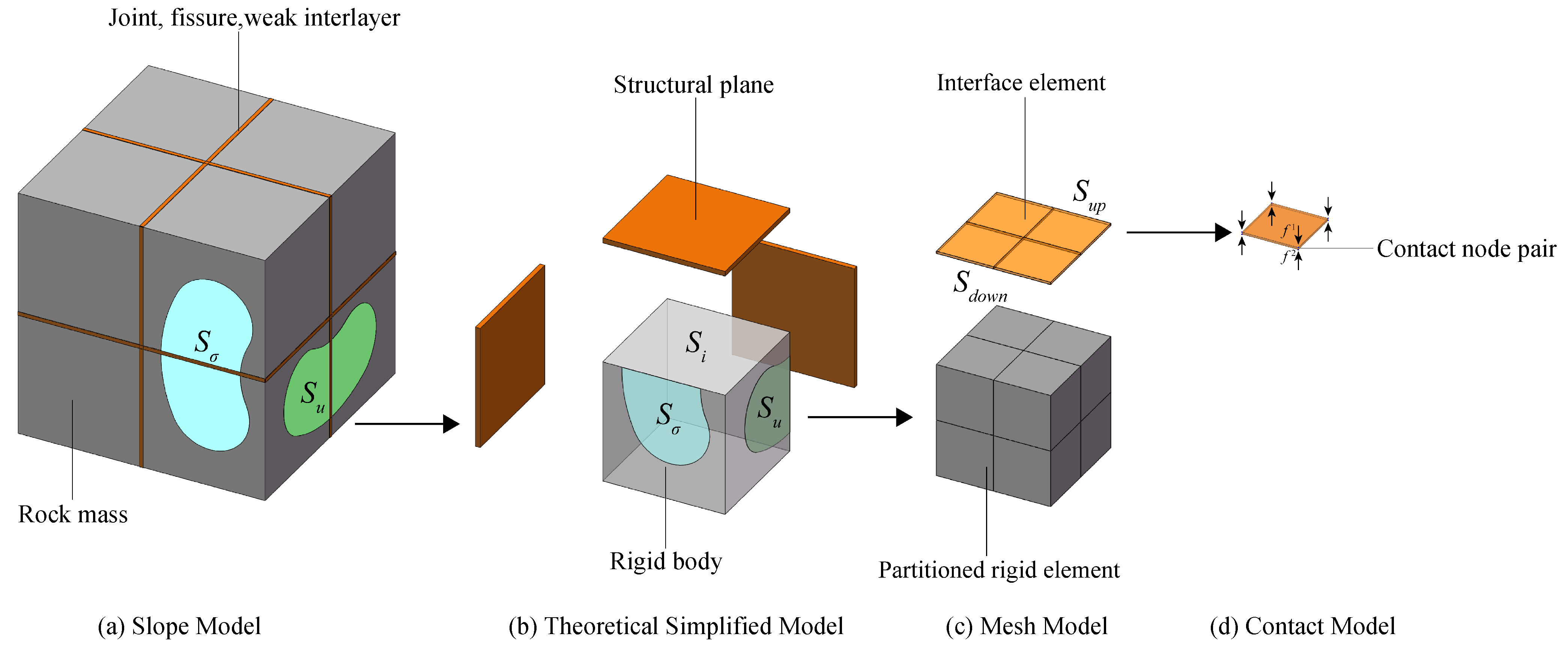
In recent years, China has planned to establish numerous water conservancy and hydropower projects in the southwest. In these areas, there may be a large number of rock slopes with complex structures and frequent geotectonic movements, which can cause serious consequences for nearby facilities in case of landslides or earthquakes. Therefore, ensuring the stability of rock slopes is crucial for the long-term safe and effective operation of engineering projects. Rock slopes often contain many discontinuous structural planes, such as joints, fissures, and weak interlayers. As a result, the slope can be viewed as consisting of two distinct structures: the rock masses segmented by structural planes, which collectively form a continuous medium, and the discontinuous structural planes themselves, characterized by their irregular shapes, thinness, and vastly different mechanical properties compared to the adjacent rock masses. As such, the structural plane becomes a potential slip surface during slope failure. Therefore, in order to study and analyze the failure mechanism of rock slope, it is necessary to explore innovative methods and conduct in-depth research on the nonlinear and discontinuous characteristics of the structural planes.
The commonly used methods for slope-stability analysis are the limit equilibrium method (LEM) [
1,
2,
3], limit analysis method (LAM) [
4,
5], and other numerical methods. The first two methods are based on the assumption of elastic and perfectly plastic material or rigid and perfectly plastic material, ignoring the loading process and only considering the ultimate load at the time of structural failure. Therefore, they are mostly used for simple two-dimensional problems, are not suitable for solving complex three-dimensional problems, and cannot simulate the process of slope transformation from continuous-medium to discontinuous-medium when slope failure occurs. With the popularization of computers and the improvement in computational efficiency, the use of numerical methods to analyze slope stability has gradually become mainstream [
6]. These numerical methods can not only satisfy the mechanical equilibrium conditions while considering the nonlinear constitutive relation of materials, but also demonstrate the development process of the plastic zone during slope failure, which is suitable for solving slope problems with complex conditions.
Since Zienkiewicz [
7] proposed the finite-element method–strength-reduction-method (FEM-SRM) in 1975, FEM has gradually become a popular numerical method for slope-stability analysis [
8,
9,
10]. Lin et al. [
11] constructed a 3D slope model by extending the 2D model longitudinally to study the effects of the dilatancy angle using the PLAXIS 3D FEM with the built-in strength reduction technique. The results showed that the effects of the dilatancy angle on the convergence of 3D and 2D slope models are different. Liu et al. [
12] proposed a 2D and 3D slope-stability finite-element limit equilibrium method using elastic finite-element stress fields and indicated that FEM can be applied to solve various slope problems. The FEM also introduces a large number of special elements (such as joint element [
13,
14], and thin layer element [
15,
16]) to simulate the nonlinear characteristics of the slope structural plane. However, this will put forward a high requirement for meshing, which not only requires the mesh near the discontinuity to be dense enough to ensure the computational accuracy, but also requires the mesh of ordinary elements and special elements to satisfy the compatibility condition on the boundary. Furthermore, in the dynamic case, despite the introduction of special elements, the elastic–plastic constitutive relationship adopted by the finite element makes it difficult to simulate the stick and debonding of discontinuous interfaces. Moreover, in the calculation process, the stiffness matrix of the whole region needs to be updated even if the nonlinear relationship only appears in the local region. Therefore, the conventional FEM is inefficient in solving complicated discontinuity issues. In 1999, Belytschko [
17] proposed a minimal remeshing finite-element method for crack growth. This method allows the crack to be arbitrarily aligned within the mesh. For severely curved cracks, remeshing may be needed, but only away from the crack tip, where remeshing is much easier. Then it evolved into a novel method called the extended finite element method (XFEM) and has subsequently been developed quickly worldwide. XFEM can be used to simulate heterogeneous materials with voids and inclusions, interfaces of bimaterial, and two-phase, so it is a possible computational alternative to treat slope instability, concrete cracking, and interfacial problems [
18].
With the in-depth study of numerical methods, the numerical methods based on the continuous medium hypothesis can hardly meet the requirements of researchers for calculation accuracy, and the numerical simulation of complex structural planes in the rock slope has gradually developed into discontinuous medium methods. The continuum medium method is dominated by FEM, and the discontinuous medium method is dominated by the discrete element method (DEM) [
19] and discontinuous deformation analysis (DDA) [
20]. Jiang et al. [
21] presented a numerical investigation into the rainfall-induced instability mechanism of a jointed rock slope with two joint inclinations of dipping 45° and 60° and the corresponding safety factor using the two-dimensional DEM, where the non-uniform strength reduction approach is employed. The results show that the proposed DEM strength reduction provides a feasible approach to analyze the rainfall-triggered instability of the jointed rock slope. Gong et al. [
22] took an anti-dip layered rock slope supported with anchor cables that failed owing to flexural toppling as an example, and took the DDA as the main analytical tool. The rationality of DDA was verified by correctly simulating the failure state of the anti-layered rock slope, and the underlying failure mechanism was studied. In recent years, the coupled FEM-DEM approach [
23] has been widely used. In this method, DEM is used in the discontinuous medium region and FEM is used in the continuous medium region, and the two regions are connected by defining a special transition layer, which can be used to simulate the failure process of local discontinuous and heterogeneous structures. However, DEM and DDA have the following limitations in practical use: DEM and DDA can usually only simulate two-dimensional models or simple three-dimensional models; these two methods require many mechanical and kinematic parameters to be determined before calculation, but the relationship between these parameters and the macroscopic properties of object is not clear; and most importantly, the DEM and DDA have high requirements for computer performance and are time-consuming when solving large and complex slope stability problems.
The rigid element method (REM) [
24,
25] is another numerical method that can simulate structural planes in rock slopes. The REM regards the system as a mass of rigid elements connected by springs distributed on contact surfaces, and the strain energy of the structure is only stored at the interface between the rigid elements. Compared with FEM, REM can solve the problems of cracking, dislocation, and sliding between elements. Compared with DEM and DDA, the computational efficiency is greatly improved. However, since the displacement interpolation function of REM is first-order, the displacement has only first-order approximation. In addition, the node stress cannot be obtained directly by REM, but only indirectly by the surface force on the interface. Therefore, the accuracy of displacement and stress solved by REM is low, which makes it difficult apply to practical slope stability analysis.
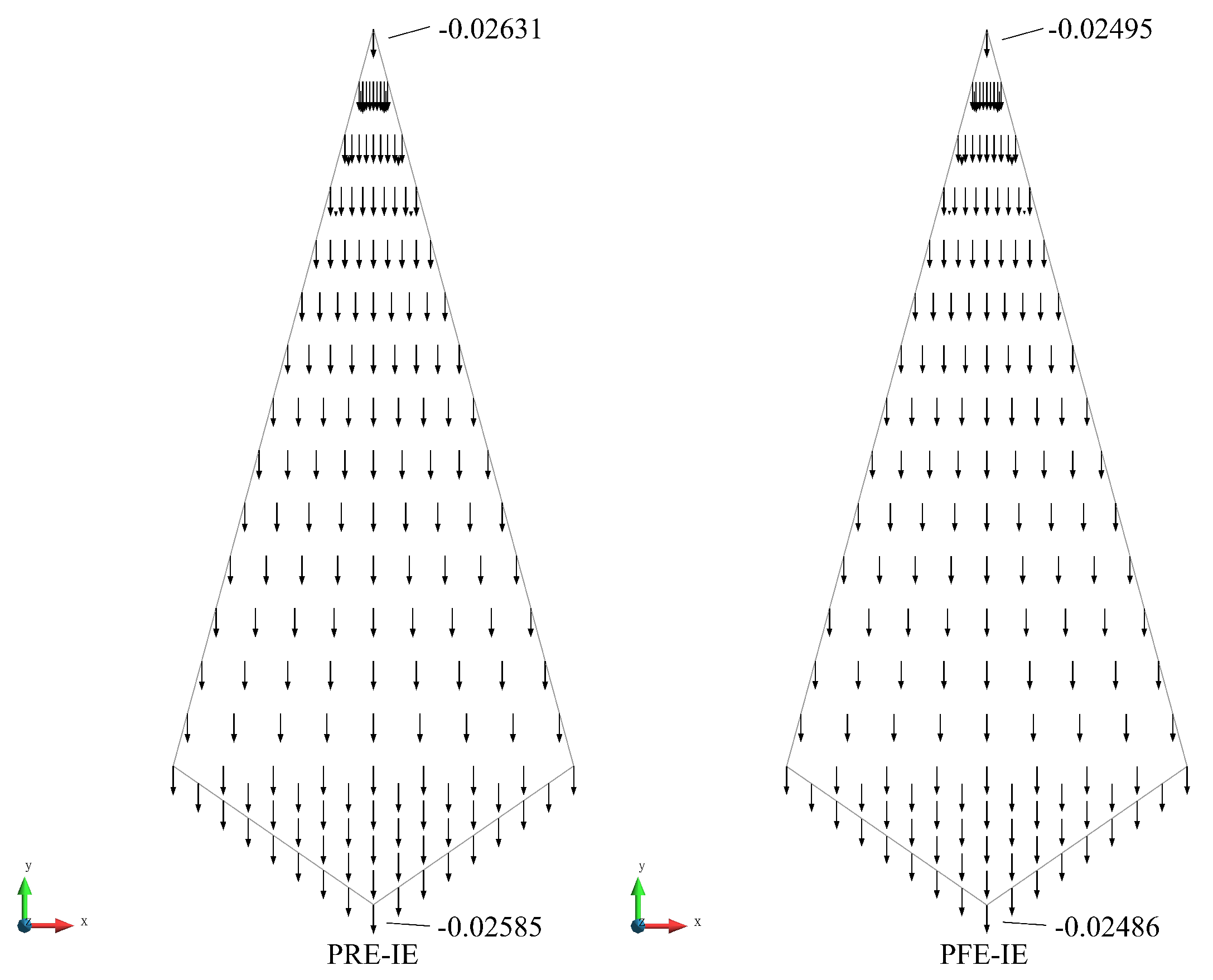
To solve such problems as slope instability, concrete cracking, and opening or closing of internal contraction joints in the dam, Li [
26] proposed an interactive method of partitioned finite elements and interface elements (PFE-IE). This method divides the structure into several continuous and locally discontinuous interfaces. Treating nodal displacement as a variable, the elastic deformation of the continuum is solved using PFE, and the rigid displacements in each body and the constraining internal forces on the interface are solved using IE based on the continuous stress condition and the static force equilibrium condition. The PFE-IE method absorbs the advantages of FEM, DEM, and DDA and partitions the large-scale model with structural discontinuity and nonlinear mechanical properties so that each region can be solved independently and the solution speed can be improved. Moreover, the PFE-IE method can conveniently calculate the stability safety factor of rock slopes with the SRM [
27].
With PFE-IE method, most of the time is spent solving the stiffness matrix of the elastic body in the slope. However, in practice, when the rock slope is in the limit equilibrium state, the elastic deformation of the rock mass can be ignored compared with the deformation at the structural plane. Therefore, we would like to find a new method to treat the rock mass as a rigid body, which can greatly improve the computational speed with less impact on the calculation accuracy.
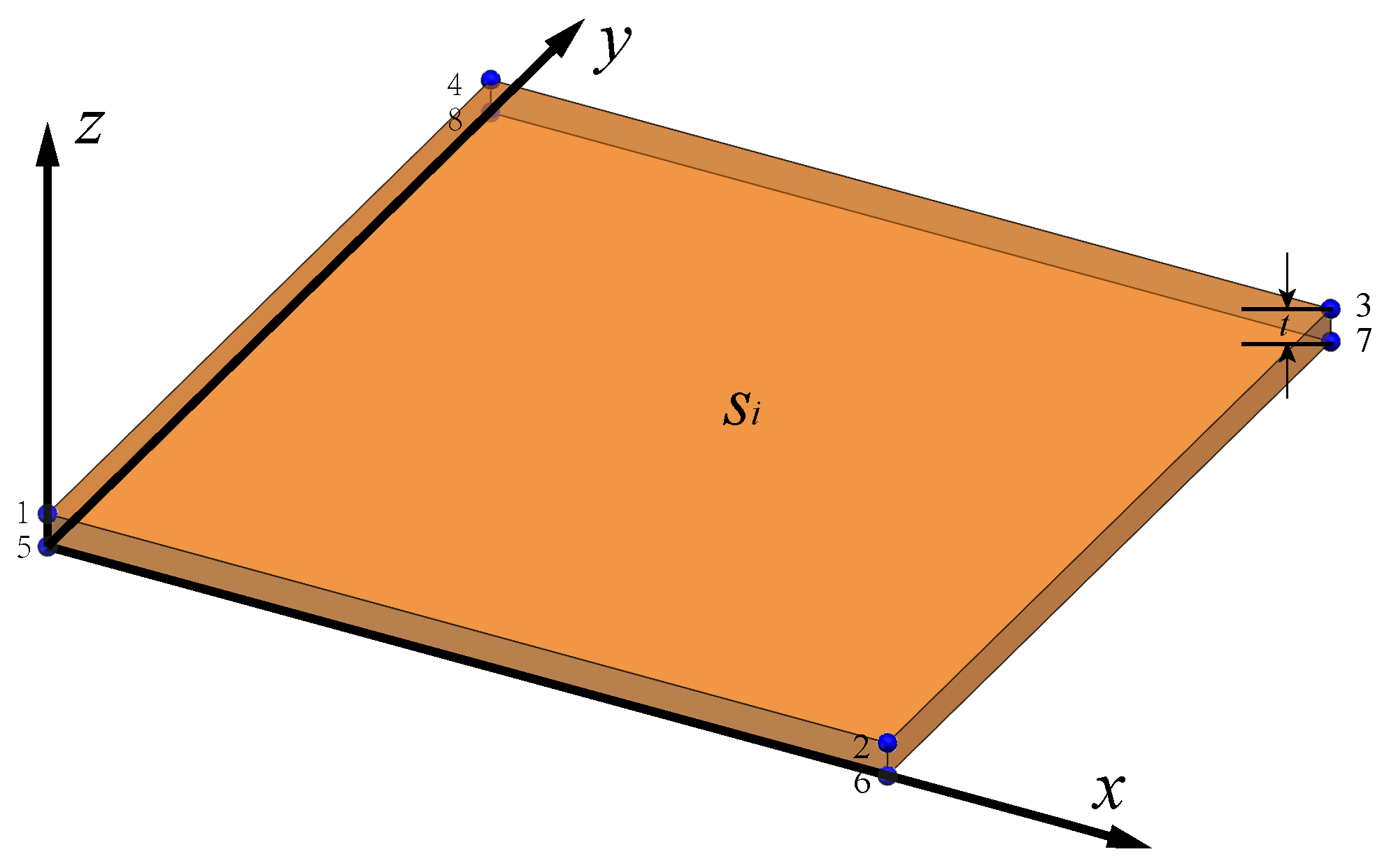
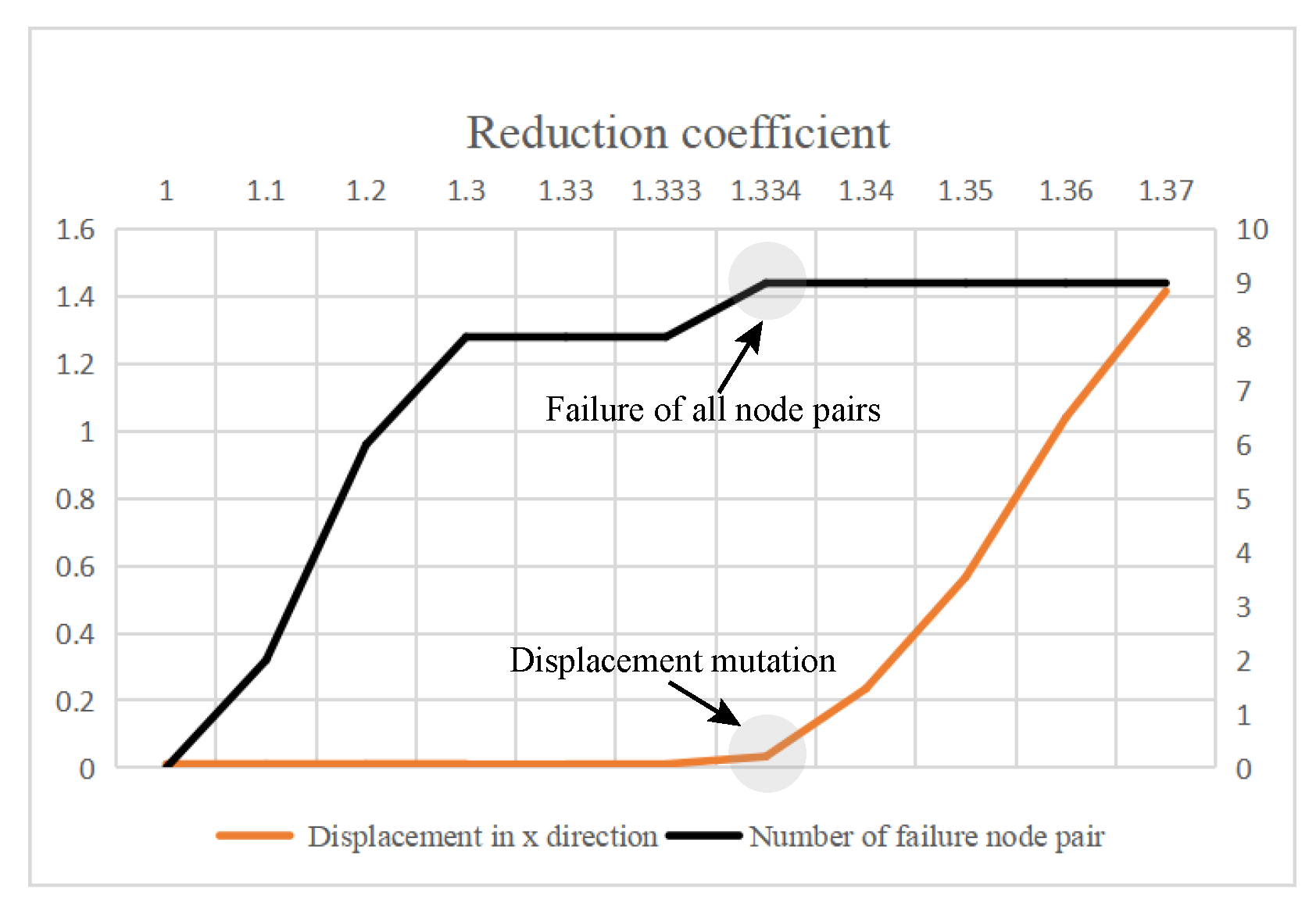
In this paper, the partitioned rigid elements and interface elements (PRE-IE) method is proposed as an improvement to the existing PFE-IE method: the structure is divided into several rigid bodies and discontinuous structural planes, on which the partitioned rigid element and interface element are established, respectively, so that the contact forces and displacements on the nodes between the rigid elements and the corresponding interface elements can be coupled. By taking the contact force of node pairs and the displacement of the rigid body centroid as mixed variables, the Lagrange multiplier method is used to establish a potential energy functional according to the principle of minimum potential energy. Then, the governing equations of PRE-IE are obtained through variational calculus and solved using the nonlinear contact iterative method and the incremental method. Finally, taking the failure of all contact node pairs as the criterion of slope failure, the stability safety factor of rock slope can be calculated using SRM. PRE-IE method absorbs the advantages of PFE-IE method and only performs nonlinear iteration on possible discontinuous structural planes, which greatly improves the efficiency of numerical calculation.
The PFE-IE method can be applied to analyze the dynamic stability of a high steep rock slope [
28,
29] and can be coupled with the smoothed particle hydrodynamics (SPH) method to investigate the effects of a landslide-generated wave (LGW) for the the safety of reservoir areas [
30]. As an improvement to the PFE-IE method, the PRE-IE method also has the potential to solve these problems. Therefore, future research could focus on using the PRE-IE method to analyze the dynamic behaviors of structures such as slopes, dams, and retaining walls and investigate the coupling of the PRE-IE method with other emerging methods [
31,
32] to monitor the stability of reservoir bank slopes and the structural health of dams.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}