

Active Low-Frequency Noise Control Implementing Genetic Algorithm on Mode Coupling of a Compound Source


Abstract
1. Introduction
2. Compound Sound Sources
2.1. Compound Sources in Noise Control
2.2. Investigations with Quadrupole Control Sources
3. GA-Based Developed ANC System
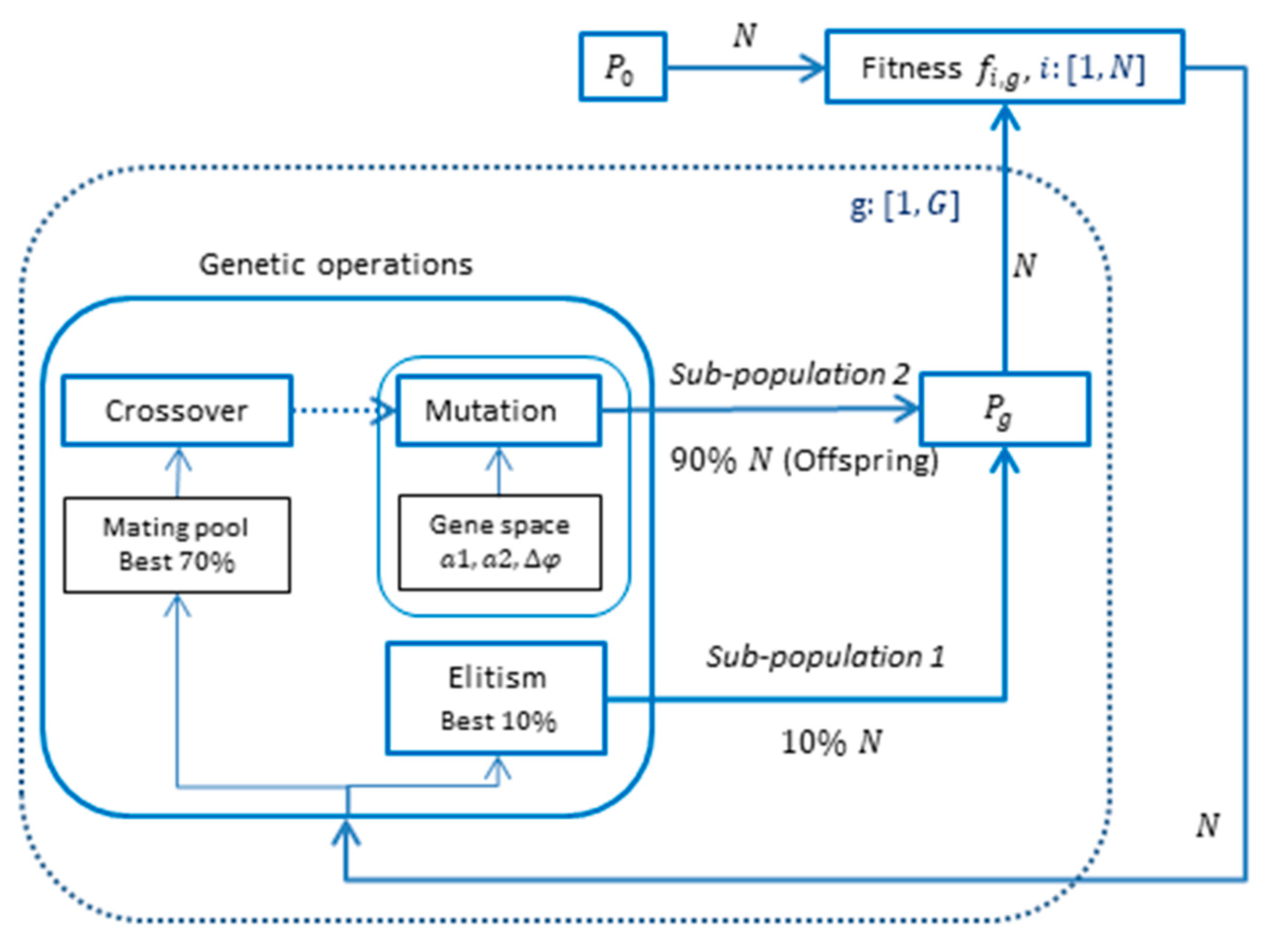
3.1. Genetic Algorithm Consideration
3.2. Coding Scheme
- gene1 (dB): amplitude of dipole components 1, ;
- gene2 (dB): amplitude of dipole components 2, ;
- gene3 (deg): phase difference between dipoles, .
3.3. Fitness Evaluation
3.4. Parent Selection
3.5. Genetic Operations of Crossover and Mutation
- –
- Calculation of the population’s average fitness, For each individual:
- –
- If , it is regarded as a low-quality solution, so the mutation rate is high in order to improve its quality.
- –
- If , it is regarded as a high-quality solution, so the mutation rate is low in order to avoid disrupting its quality.
3.6. GA Parameters Selection
4. Measurement Strategy and Equipment
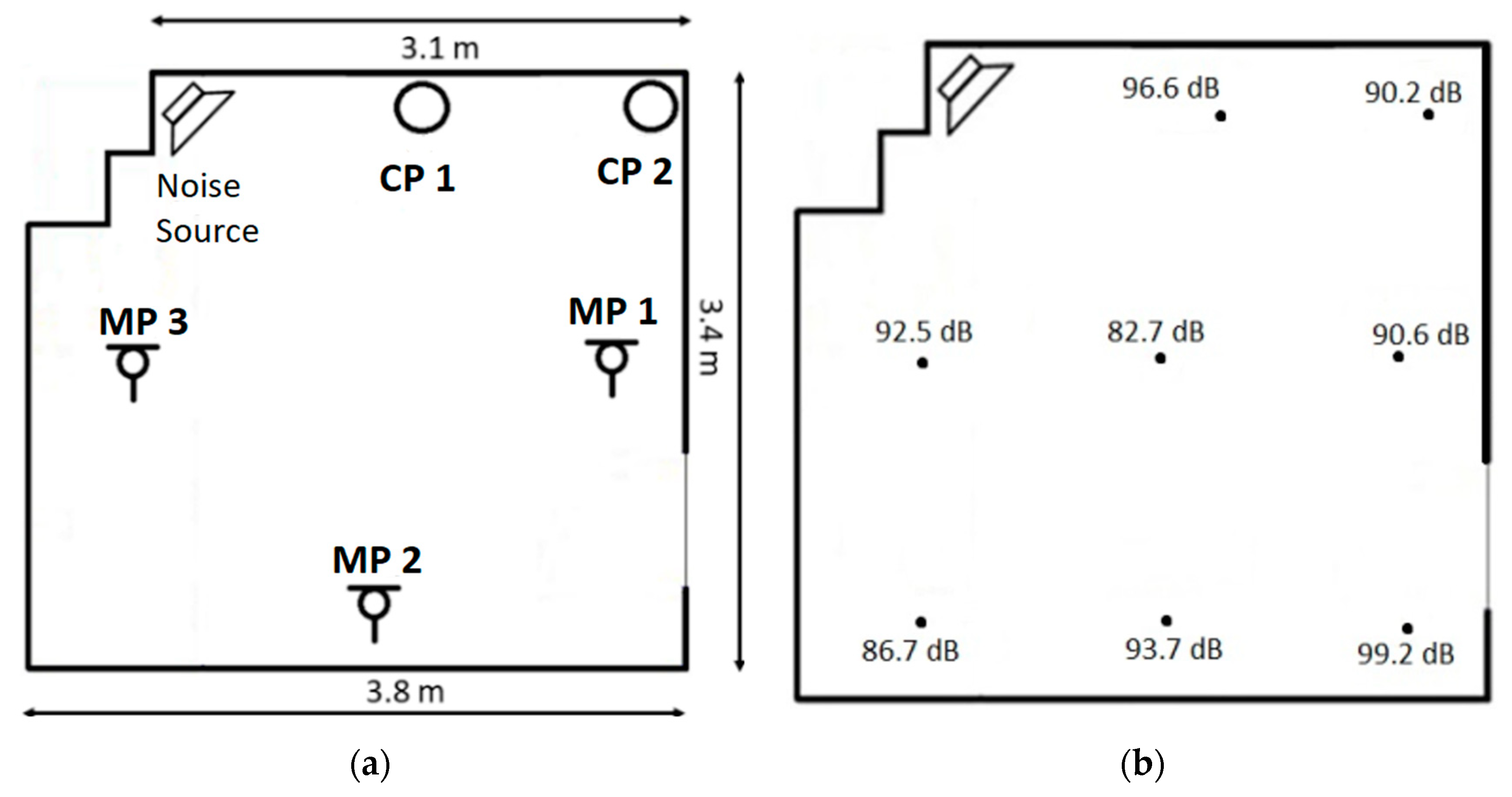
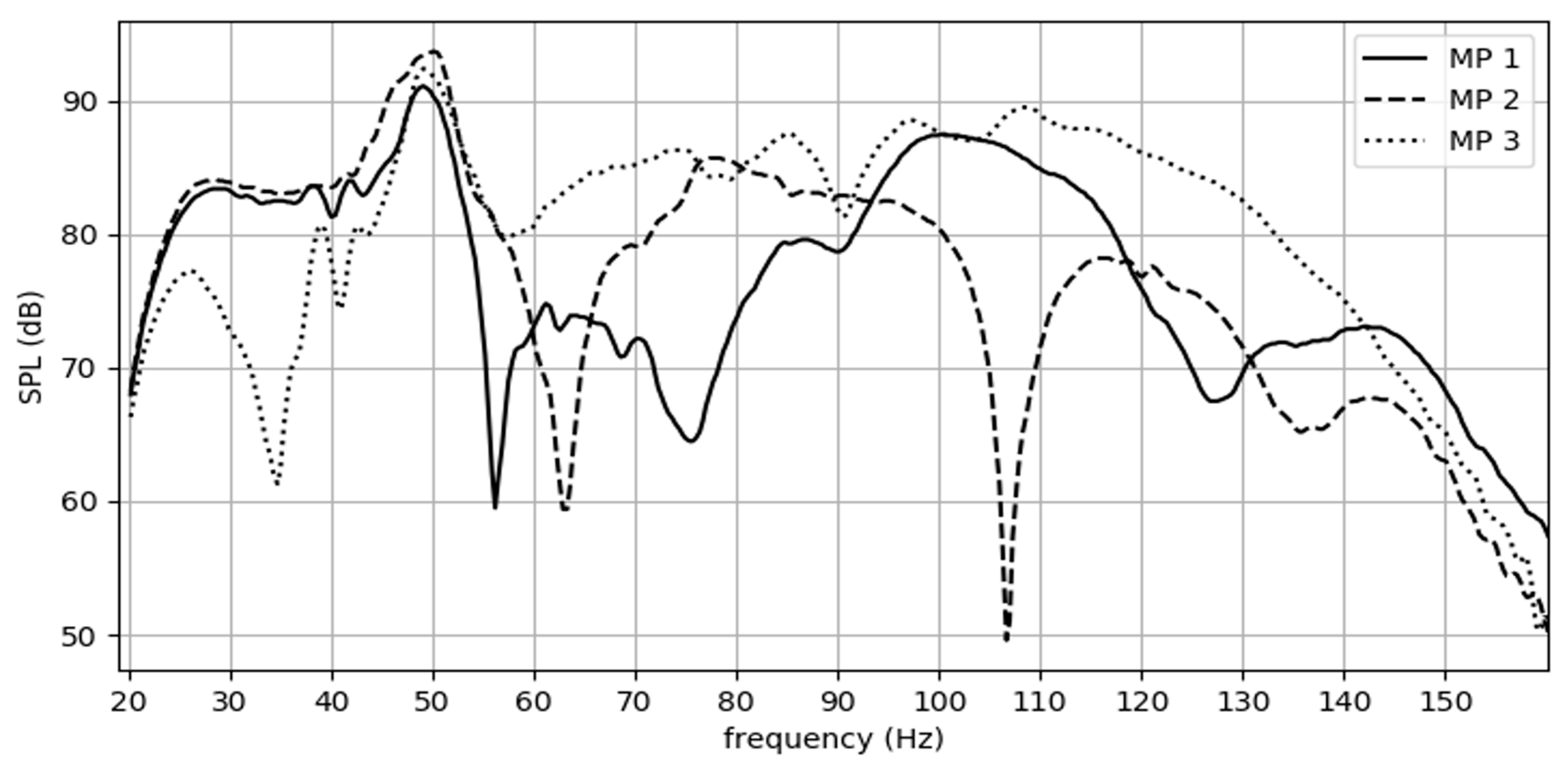
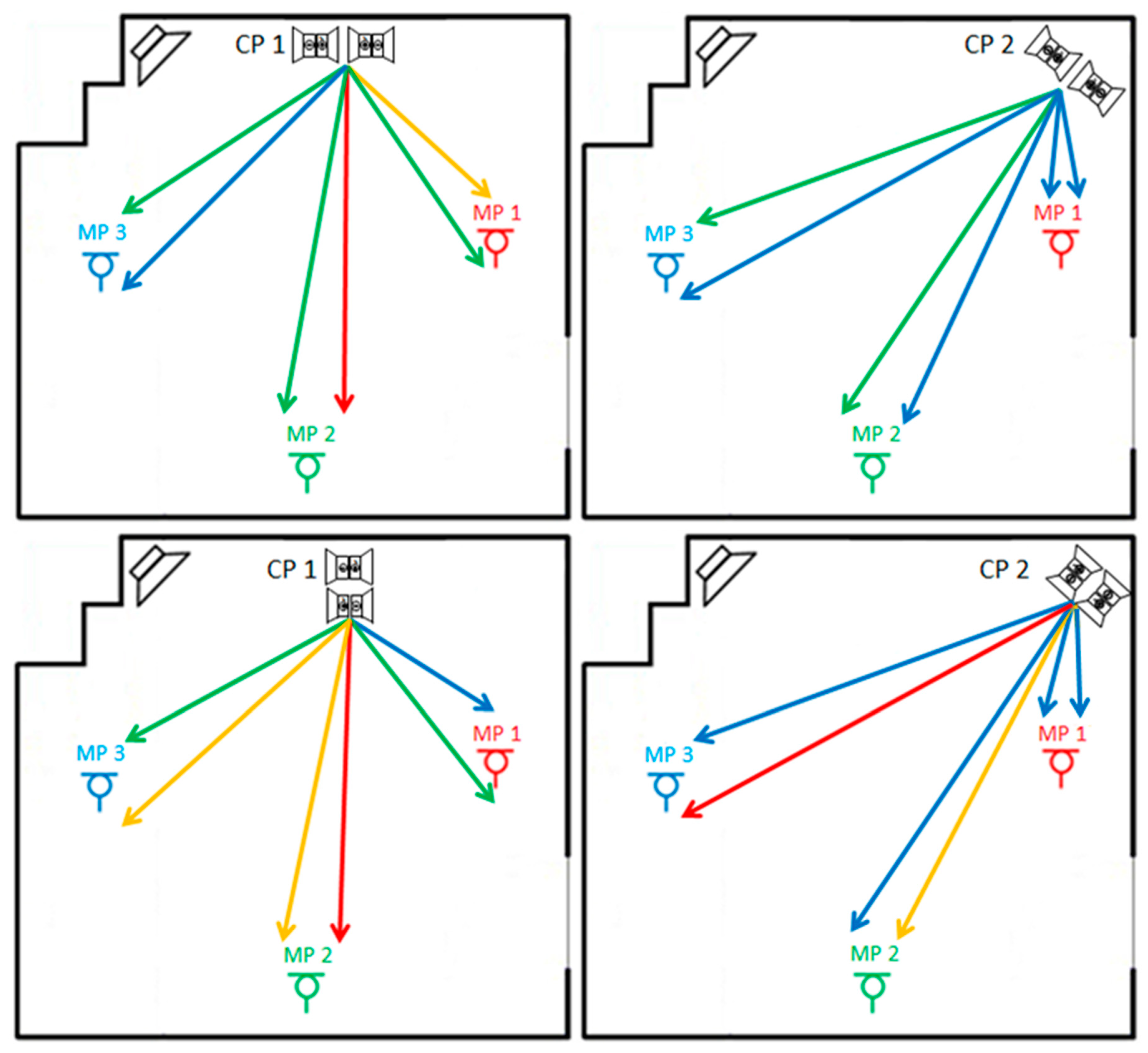
4.1. Investigated Room and Sources Configuration
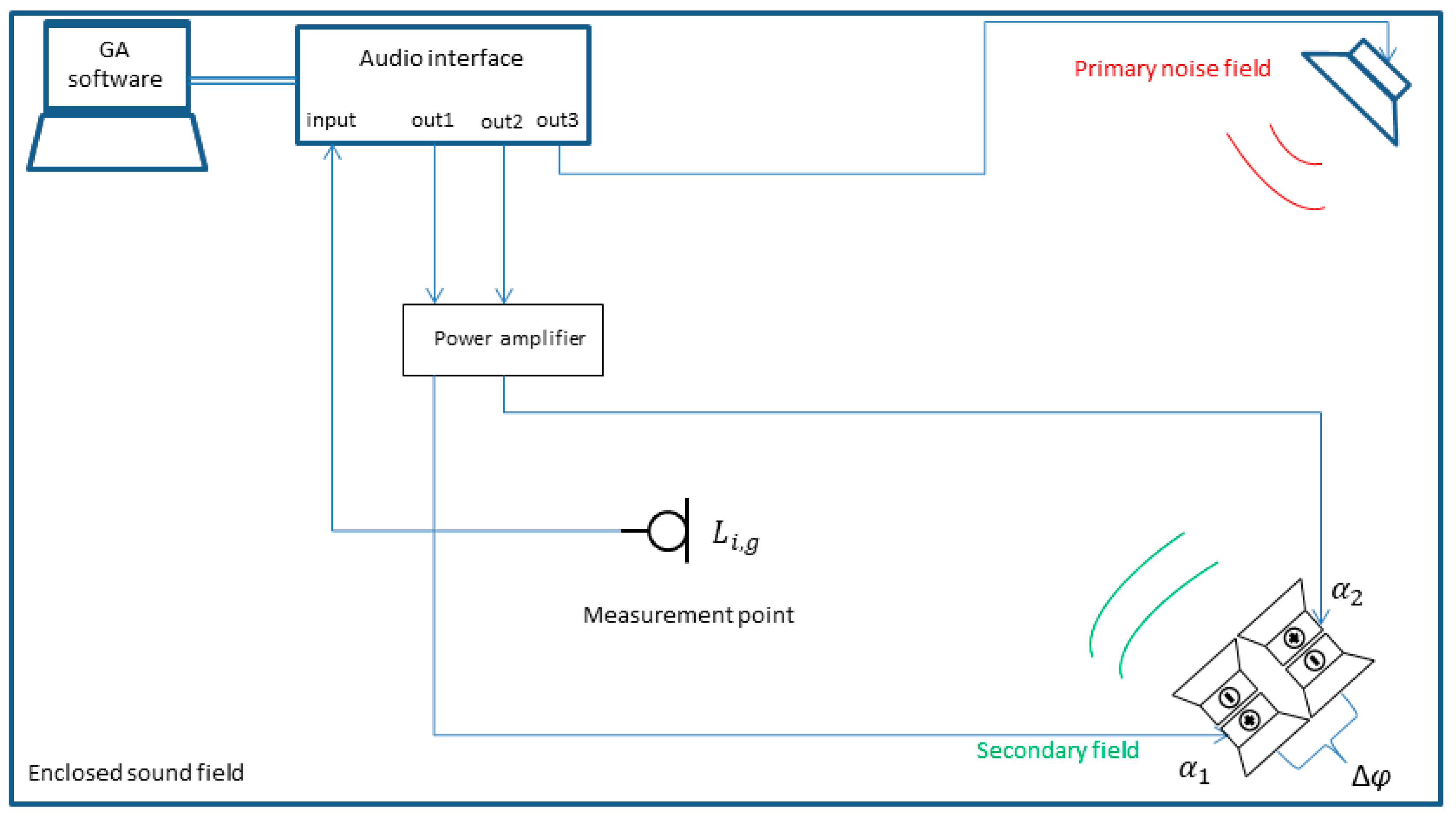
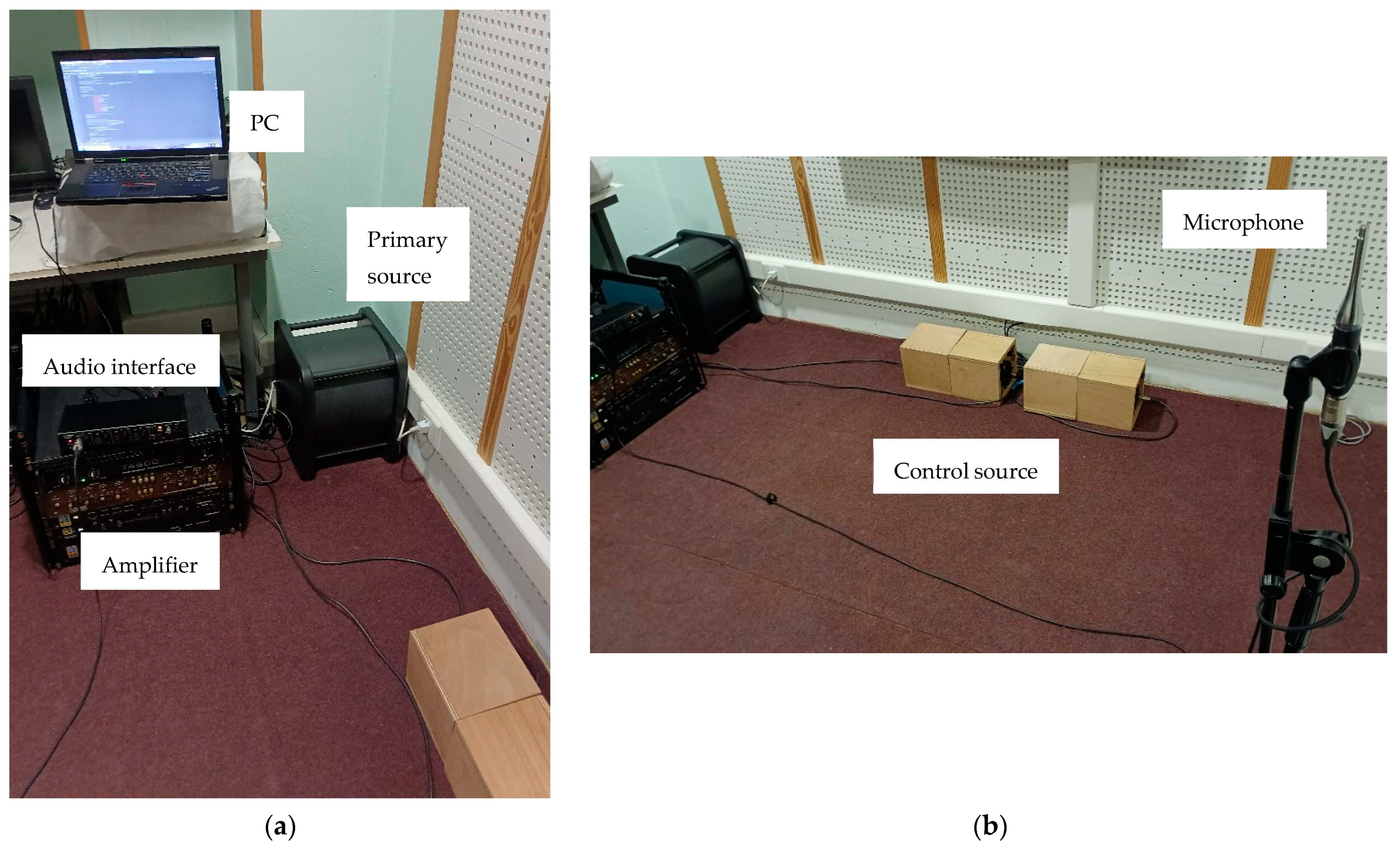
4.2. Equipment of the ANC Experiments
5. Experimental Results and Discussion
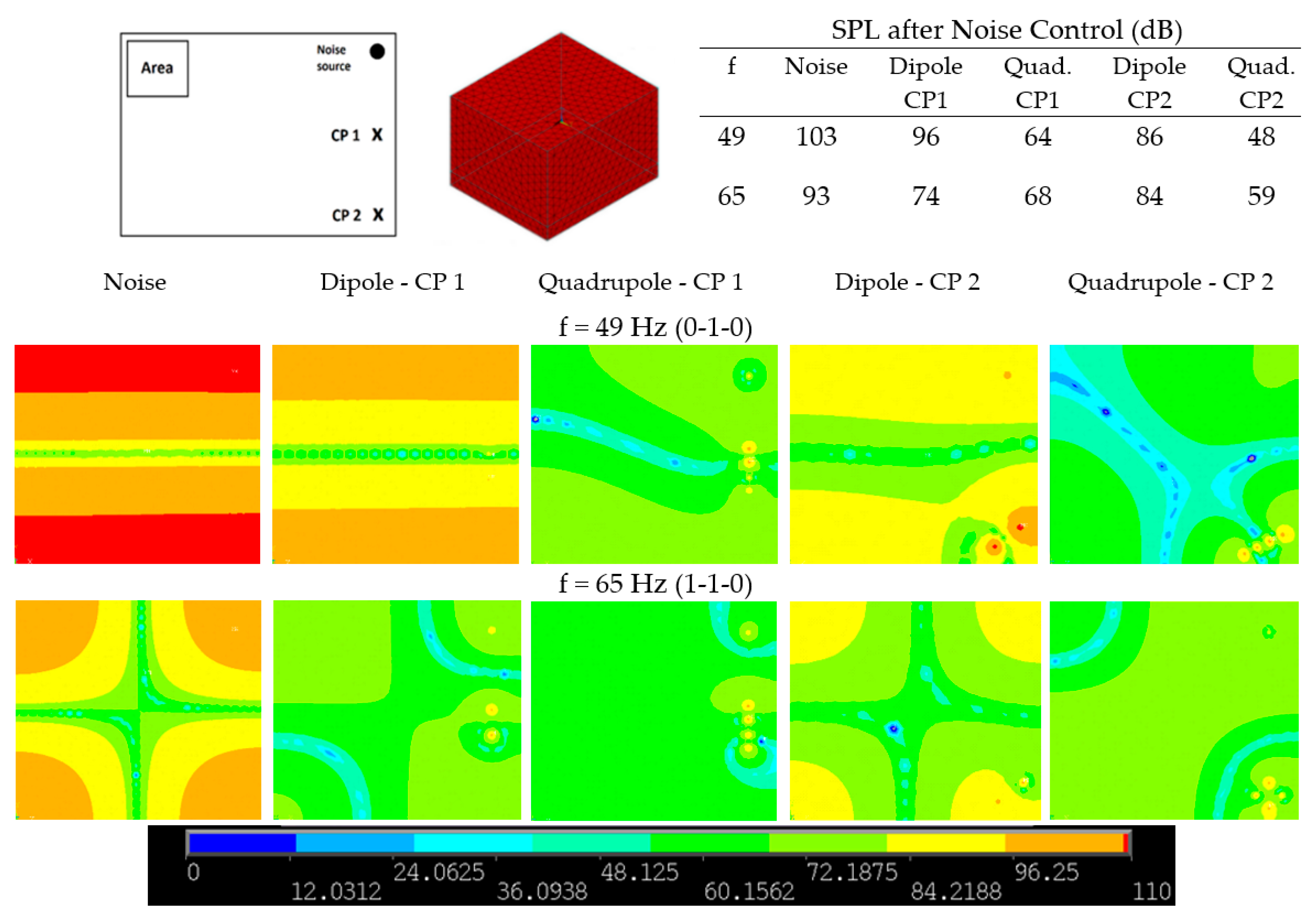
5.1. Results
- –
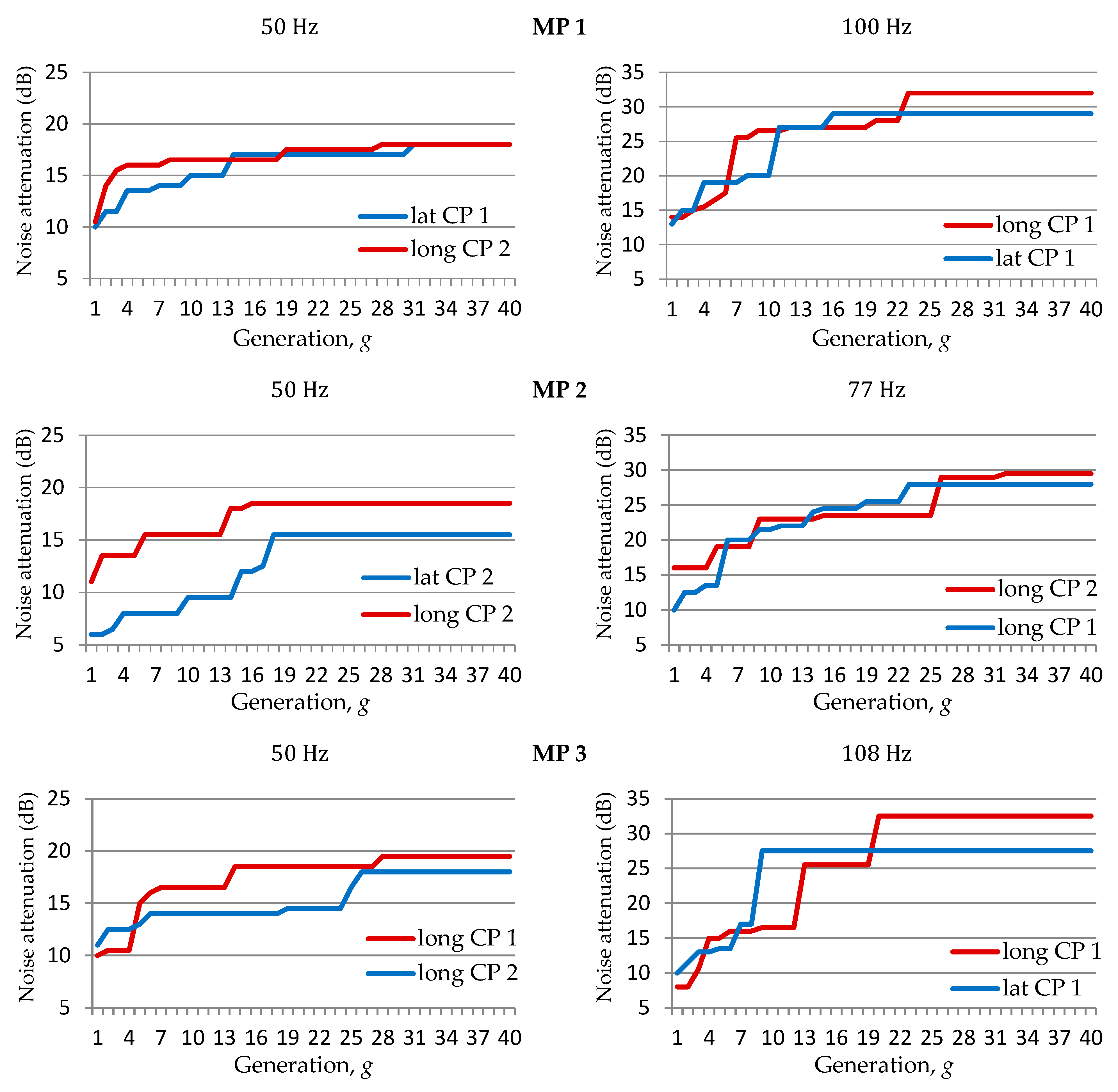
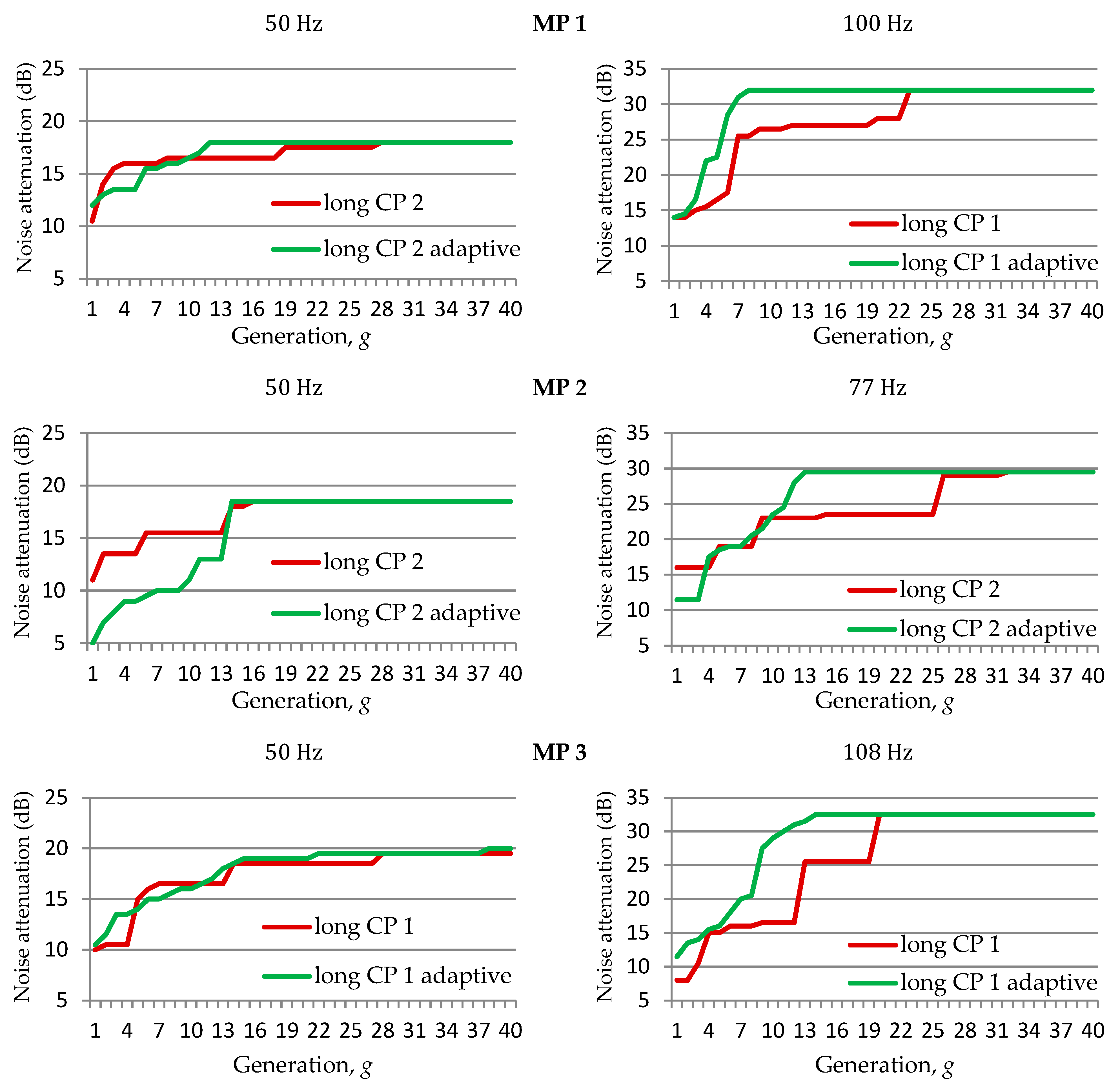
- MP 1: From Table 2, it seems that both quadrupoles offer the same maximum attenuation at when they are positioned at CP 2 and CP 1, respectively. At , the attenuation is much higher, reaching , and the longitudinal prevails slightly over the lateral source, giving a higher maximum attenuation.
- –
- MP 2: At , the longitudinal quadrupole at CP 2 attains a quite satisfying attenuation of , while the lateral source at the same position achieves a reduction of . At , the longitudinal quadrupole offers noise attenuation up to , in which CP 2 has the advantage over CP 1.
- –
- MP 3: At , the longitudinal quadrupole at CP 1 offers high primary attenuation of . At , it reaches a reduction of at the same position. Again, the longitudinal source offers higher attenuation at both frequencies.
5.2. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lueg, P. Process of Silencing Sound Oscillations. U.S. Patent 2043416, 9 June 1936. [Google Scholar]
- Elliott, S. Signal Processing for Active Control; Elsevier: Amsterdam, The Netherlands, 2000. [Google Scholar]
- Zhang, J.; Elliott, S.J.; Cheer, J. Robust Performance of Virtual Sensing Methods for Active Noise Control. Mech. Syst. Signal Process. 2021, 152, 107453. [Google Scholar] [CrossRef]
- Libianchi, P.; Brunskog, J.; Agerkvist, F.; Shabalina, E. Active Noise Control at Low Frequencies for Outdoor Live Music Events Using the Conjugate Gradient Least Square Method. Appl. Acoust. 2023, 205, 109235. [Google Scholar] [CrossRef]
- Wang, S.; Yu, J.; Qiu, X.; Pawelczyk, M.; Shaid, A.; Wang, L. Active Sound Radiation Control with Secondary Sources at the Edge of the Opening. Appl. Acoust. 2017, 117, 173–179. [Google Scholar] [CrossRef]
- Lam, B.; Shi, D.; Belyi, V.; Wen, S.; Gan, W.S.; Li, K.; Lee, I. Active Control of Low-Frequency Noise through a Single Top-Hung Window in a Full-Sized Room. Appl. Sci. 2020, 10, 6817. [Google Scholar] [CrossRef]
- Ha, S.; Kim, J.; Kim, H.-G.; Wang, S. Horizontal Active Noise Control Based on Wave Field Reproduction Using a Single Circular Array in 3D Space. Appl. Sci. 2022, 12, 10245. [Google Scholar] [CrossRef]
- Jiang, T.; Liu, J.; Peng, C.; Wang, S. Laboratory Test of a Vehicle Active Noise-Control System Based on an Adaptive Step Size Algorithm. Appl. Sci. 2023, 13, 225. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, L.; Meng, D.; Pi, X. Active Control of Vehicle Interior Engine Noise Using a Multi-Channel Delayed Adaptive Notch Algorithm Based on FxLMS Structure. Mech. Syst. Signal Process. 2023, 186, 109831. [Google Scholar] [CrossRef]
- Sun, M.; Lu, C.; Liu, Z.; Chen, W.; Shen, C.; Chen, H. A New Feedforward and Feedback Hybrid Active Noise Control System for Excavator Interior Noise. Appl. Acoust. 2022, 197, 108872. [Google Scholar] [CrossRef]
- Lu, L.; Yin, K.L.; de Lamare, R.C.; Zheng, Z.; Yu, Y.; Yang, X.; Chen, B. A Survey on Active Noise Control in the Past Decade–Part I: Linear Systems. Signal Process. 2021, 183, 108039. [Google Scholar] [CrossRef]
- Lu, L.; Yin, K.L.; de Lamare, R.C.; Zheng, Z.; Yu, Y.; Yang, X.; Chen, B. A Survey on Active Noise Control in the Past Decade–II: Nonlinear Systems. Signal Process. 2021, 181, 107929. [Google Scholar] [CrossRef]
- Goldberg, D.E. Genetic Algorithm in Search, Optimization and Machine Learning; Addison-Wesley Longman Publishing Co., Inc.: New York, NY, USA, 1989. [Google Scholar]
- Wangler, C.T.; Hansen, C.H. Genetic Algorithm Adaptation of Non-Linear Filter Structures for Active Sound and Vibration Control. In Proceedings of the ICASSP’94, IEEE International Conference on Acoustics, Speech and Signal Processing, Adelaide, SA, Australia, 19–22 April 1994; Volume 3, pp. 505–508. [Google Scholar]
- Tang, K.S.; Man, K.F.; Kwong, S.; He, Q. Genetic Algorithms and their Applications. IEEE Signal Process. Mag. 1996, 13, 22–37. [Google Scholar] [CrossRef]
- Simpson, M.T.; Hansen, C.H. Use of Genetic Algorithms to Optimize Vibration Actuator Placement for Active Control of Harmonic Interior Noise in a Cylinder with Floor Structure. Noise Control Eng. J. 1996, 44, 169–184. [Google Scholar] [CrossRef]
- Diamantis, Z.; Tsahalis, D.; Borchers, I. Optimization of an Active Noise Control System Inside an Aircraft, Based on the Simultaneous Optimal Positioning of Microphones and Speakers, with the Use of a Genetic Algorithm. Comput. Optim. Appl. 2002, 23, 65–76. [Google Scholar] [CrossRef]
- Baek, K.H.; Elliott, S.J. Natural Algorithms for Choosing Source Locations in Active Control Systems. J. Sound Vib. 1995, 186, 245–267. [Google Scholar] [CrossRef]
- Makarewicz, G. Application of Genetic Algorithm in an Active Noise Control System. Arch. Acoust. 2007, 32, 839–849. [Google Scholar]
- Martin, T.; Roure, A. Active Noise Control of Acoustic Sources Using Spherical Harmonic Expansion and a Genetic Algorithm: Simulation and Experiment. J. Sound Vib. 1998, 212, 511–523. [Google Scholar] [CrossRef]
- Montazeri, A.; Poshtan, J. GA-based Optimization of a MIMO ANC System Considering Coupling of Secondary Sources in a Telephone Kiosk. Appl. Acoust. 2009, 70, 945–953. [Google Scholar] [CrossRef]
- Long, G.; Wang, Y.; Lim, T. Optimal Parametric Design of Delayless Subband Active Noise Control System Based on Genetic Algorithm Optimization. J. Vib. Control 2021, 28, 1950–1961. [Google Scholar] [CrossRef]
- Giouvanakis, M.; Sevastiadis, C.; Vrysis, L.; Papanikolaou, G. Control of Resonant Low-Frequency Noise Simulations in Different Areas of Small Spaces Using Compound Source. In Proceedings of the Euronoise Conference, Crete, Greece, 27–31 May 2018. [Google Scholar]
- Giouvanakis, M.; Sevastiadis, C.; Papanikolaou, G. Low-Frequency Noise Attenuation in a Closed Space using Adaptive Directivity Control Sources of a Quadrupole Type. Arch. Acoust. 2019, 44, 71–78. [Google Scholar] [CrossRef]
- Giouvanakis, M.; Kasidakis, K.; Sevastiadis, C.; Papanikolaou, G. Design and Construction of Loudspeakers with Low-Bl Drivers for Low-Frequency Active Noise Control Applications. In Proceedings of the 23rd ICA, Aachen, Germany, 9–13 September 2019. [Google Scholar]
- Giouvanakis, M.; Sevastiadis, C.; Papanikolaou, G. Measurement of Compound Sound Sources with Adaptive Spatial Radiation for Low-Frequency Active Noise Control Applications. Arch. Acoust. 2021, 46, 205–212. [Google Scholar] [CrossRef]
- Bullmore, A.J.; Nelson, P.A.; Curtis, A.R.D.; Elliott, S.J. The Active Minimization of Harmonic Enclosed Sound Fields, Part II: A Computer Simulation. J. Sound Vib. 1987, 117, 15–33. [Google Scholar] [CrossRef]
- Aarts, R.O.M. High-Efficiency Low-Bl Loudspeakers. J. Audio Eng. Soc. 2005, 53, 579–592. [Google Scholar]
- Altanis, T.; Mourjopoulos, J. Analysis of Low Frequency Audio Reproduction via Multiple Low-Bl Loudspeakers. In Proceedings of the 128th Convention of the Audio Engineering Society, London, UK, 22–25 May 2010. [Google Scholar]
- Olson, H.F. Gradient Loudspeakers. J. Audio Eng. Soc. 1973, 21, 86–93. [Google Scholar] [CrossRef]
- Hill, A.J.; Hawksford, M.O.J. Chameleon Subwoofer Arrays—Generalized Theory of Vectored Sources in a Closed Acoustic Space. In Proceedings of the 128th Convention of the Audio Engineering Society, London, UK, 22–25 May 2010. [Google Scholar]
- Kido, K. The technologies for active noise control. J. Acoust. Soc. Jpn. 1991, 12, 245–253. [Google Scholar] [CrossRef]
- Wang, S.; Sun, H.; Pan, J.; Qiu, X. Near-Field Error Sensing for Active Directivity Control of Radiated Sound. J. Acoust. Soc. Am. 2018, 144, 598–607. [Google Scholar] [CrossRef]
- Bolton, J.S.; Gardner, B.K.; Beauvilain, T.A. Sound Cancellation by the Use of Secondary Multipoles. J. Acoust. Soc. Am. 1995, 98, 2343–2362. [Google Scholar] [CrossRef]
- Qiu, X.; Hansen, C.H. Secondary Acoustic Source Types for Active Noise Control in Free Field: Monopoles or Multipoles? J. Sound Vib. 2000, 232, 1005–1009. [Google Scholar] [CrossRef]
- Chen, W.; Pu, H.; Qiu, X. A Compound Secondary Source for Active Noise Radiation Control. Appl. Acoust. 2010, 71, 101–106. [Google Scholar] [CrossRef]
- Norton, M.P.; Karczub, D.G. Fundamentals of Noise and Vibration Analysis for Engineers, 3rd ed.; Cambridge University Press: Cambridge, UK, 2003; pp. 162–164. [Google Scholar]
- Boodoo, S.; Paurobally, R.; Bissessur, Y. A Review of the Effect of Reflective Surfaces on Power Output of Sound Sources and on Actively Created Quiet Zones. Acta Acust. United Acust. 2015, 101, 877–891. [Google Scholar] [CrossRef]
- Borwick, J. Loudspeaker and Headphone Handbook, 3rd ed.; Focal Press: Oxford, UK, 2001. [Google Scholar]
- Tao, J.; Wang, S.; Qiu, X.; Pan, J. Performance of a Multichannel Active Sound Radiation Control System Near a Reflecting Surface. Appl. Acoust. 2017, 123, 1–8. [Google Scholar] [CrossRef]
- Ferekidis, C.; Kempe, U. Room Mode Excitation of Dipolar and Monopolar Low Frequency Sources. In Proceedings of the 100th Convention of the Audio Engineering Society, Copenhagen, Denmark, 11–14 May 1996. [Google Scholar]
- Russell, D.A.; Titlow, J.P.; Bemmen, Y.J. Acoustic Monopoles, Dipoles, and Quadrupoles: An Experiment Revisited. Am. J. Phys. 1999, 67, 660–664. [Google Scholar] [CrossRef]
- Beranek, L.L. Acoustics; Bolt Beranek and Newman Inc.: Cambridge, MA, USA, 1996. [Google Scholar]
- Prinn, A.G. A Review of Finite Element Methods for Room Acoustics. Acoustics 2023, 5, 367–395. [Google Scholar] [CrossRef]
- Istvan, L.V.; Beranek, L.L. Noise and Vibration Control Engineering Principles and Applications, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2006; pp. 145–150. [Google Scholar]
- Rossum, G.V.; Drake, F.L. Python 3 Reference Manual; CreateSpace: Scotts Valley, CA, USA, 2009. [Google Scholar]
- Gad, A.F. PyGAD: An Intuitive Genetic Algorithm Python Library. arXiv 2021, arXiv:2106.06158. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Population size, : 40 | Elite solutions: 4 |
| Total generations, : 40 | Crossover type: single point |
| Chromosome length: 3 | Crossover probability, |
| Parent selection scheme: rank selection | Random mutation probability, |
| Selected solutions as mating parents: 28 | Adaptive mutation probabilities, |
| MP | CP | Control Setup | Max Noise Reduction | Optimal Driving Parameters | |
|---|---|---|---|---|---|
| 1 | 2/1 | Long/Lat | |||
| 1/1 | Long/Lat | ||||
| 2 | 2/2 | Long/Lat | |||
| 2/1 | Long/Long | ||||
| 3 | 1/2 | Long/Long | |||
| 1/1 | Long/Lat |
| MP 1 | MP 2 | MP 3 | ||||
|---|---|---|---|---|---|---|
| Long—CP1 | 10 | 32 | 7 | 28 | 19.5 | 32.5 |
| Long—CP2 | 18 | 17 | 18.5 | 29.5 | 18 | 25.5 |
| Lat—CP1 | 18 | 29 | 6 | 9 | 8.5 | 27.5 |
| Lat—CP2 | 17 | 24 | 15.5 | 18.5 | 6.5 | 21.5 |
| MP | Frequency | CP | Control Setup | Max. Noise Reduction | Optimal Driving Parameters |
|---|---|---|---|---|---|
| 1 | 2 | Long | |||
| 1 | Long | ||||
| 2 | 2 | Long | |||
| 2 | Long | ||||
| 3 | 1 | Long | |||
| 1 | Long |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giouvanakis, M.; Sevastiadis, C.; Papanikolaou, G. Active Low-Frequency Noise Control Implementing Genetic Algorithm on Mode Coupling of a Compound Source. Appl. Sci. 2023, 13, 6740. https://doi.org/10.3390/app13116740
Giouvanakis M, Sevastiadis C, Papanikolaou G. Active Low-Frequency Noise Control Implementing Genetic Algorithm on Mode Coupling of a Compound Source. Applied Sciences. 2023; 13(11):6740. https://doi.org/10.3390/app13116740
Chicago/Turabian StyleGiouvanakis, Marios, Christos Sevastiadis, and George Papanikolaou. 2023. "Active Low-Frequency Noise Control Implementing Genetic Algorithm on Mode Coupling of a Compound Source" Applied Sciences 13, no. 11: 6740. https://doi.org/10.3390/app13116740
APA StyleGiouvanakis, M., Sevastiadis, C., & Papanikolaou, G. (2023). Active Low-Frequency Noise Control Implementing Genetic Algorithm on Mode Coupling of a Compound Source. Applied Sciences, 13(11), 6740. https://doi.org/10.3390/app13116740