

Evaluation of Accelerator Pedal Strength under Critical Loads Using the Finite Element Method

 ,
,  , ,
, ,
Abstract
1. Introduction
2. Materials and Methods
2.1. Direct Task
2.2. Inverse Task
2.3. Hybrid Task
2.4. Shock Load Task
- [M], [C], [K]—mass matrix, damping matrix, and stiffness matrix, respectively;
- —acceleration, velocity, and displacement, respectively;
- {F}—load vector.
- -
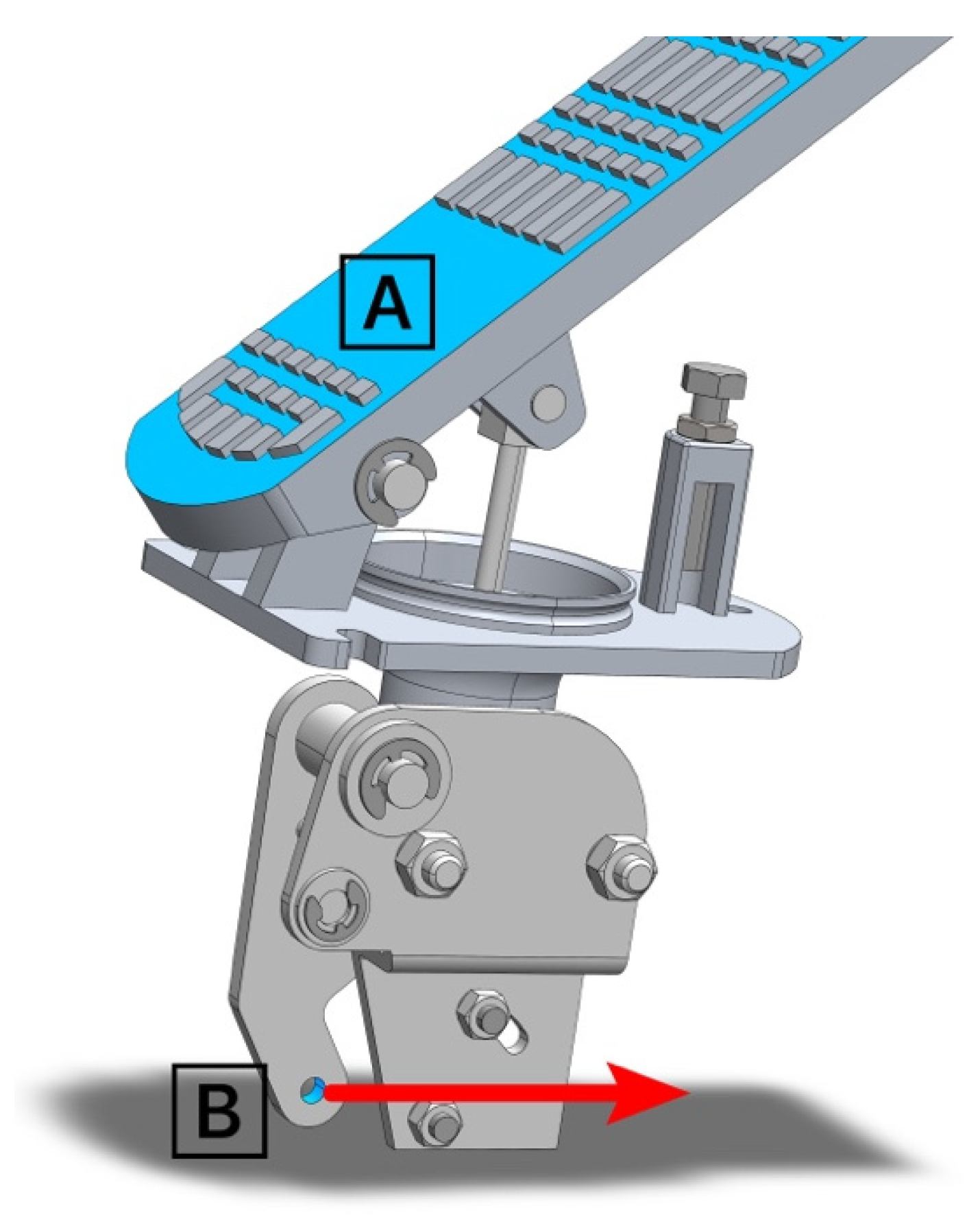
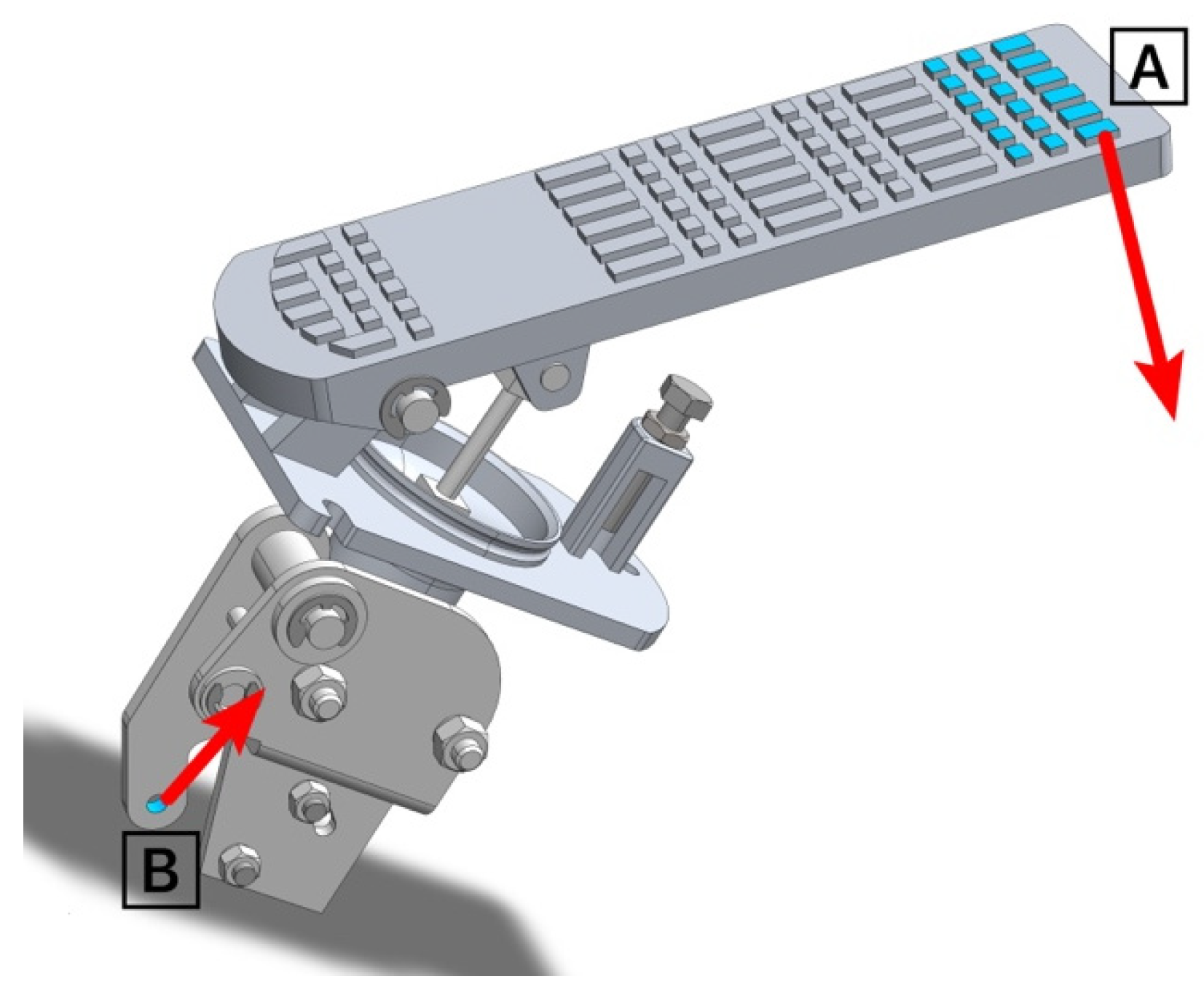
- Before approaching line 1, the pedal has not yet made contact with the limiter (appropriate bolt regulating the maximum displacement of the pedal);
- -
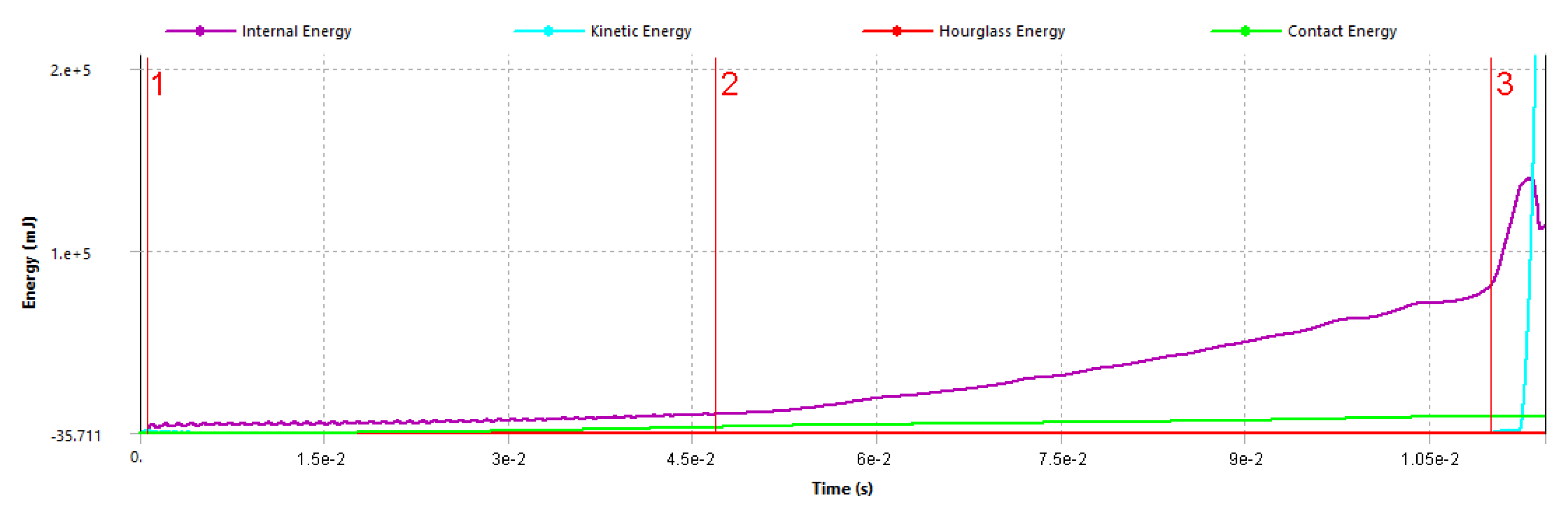
- Between lines 1 and 2, there is a contact of the pedal with the bolt, which is accompanied by a micro-vibration, which continues until the contact is stabilized (wavy line—“Internal energy”);
- -
- Between lines 2 and 3, the contact of the pedal behind the bolt stabilizes and the stage of elastic deformations begins as the load from the pedal increases;
- -
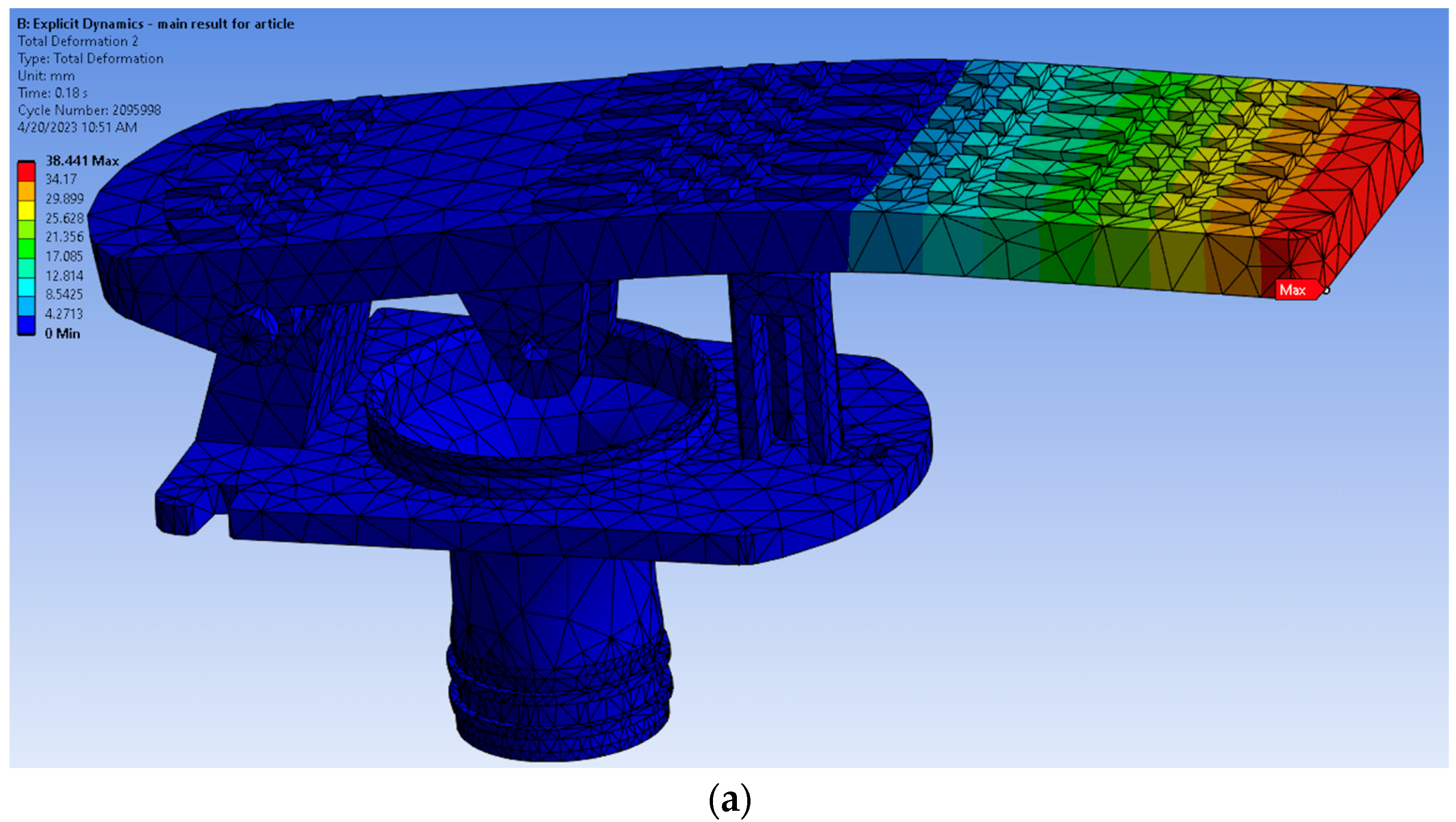
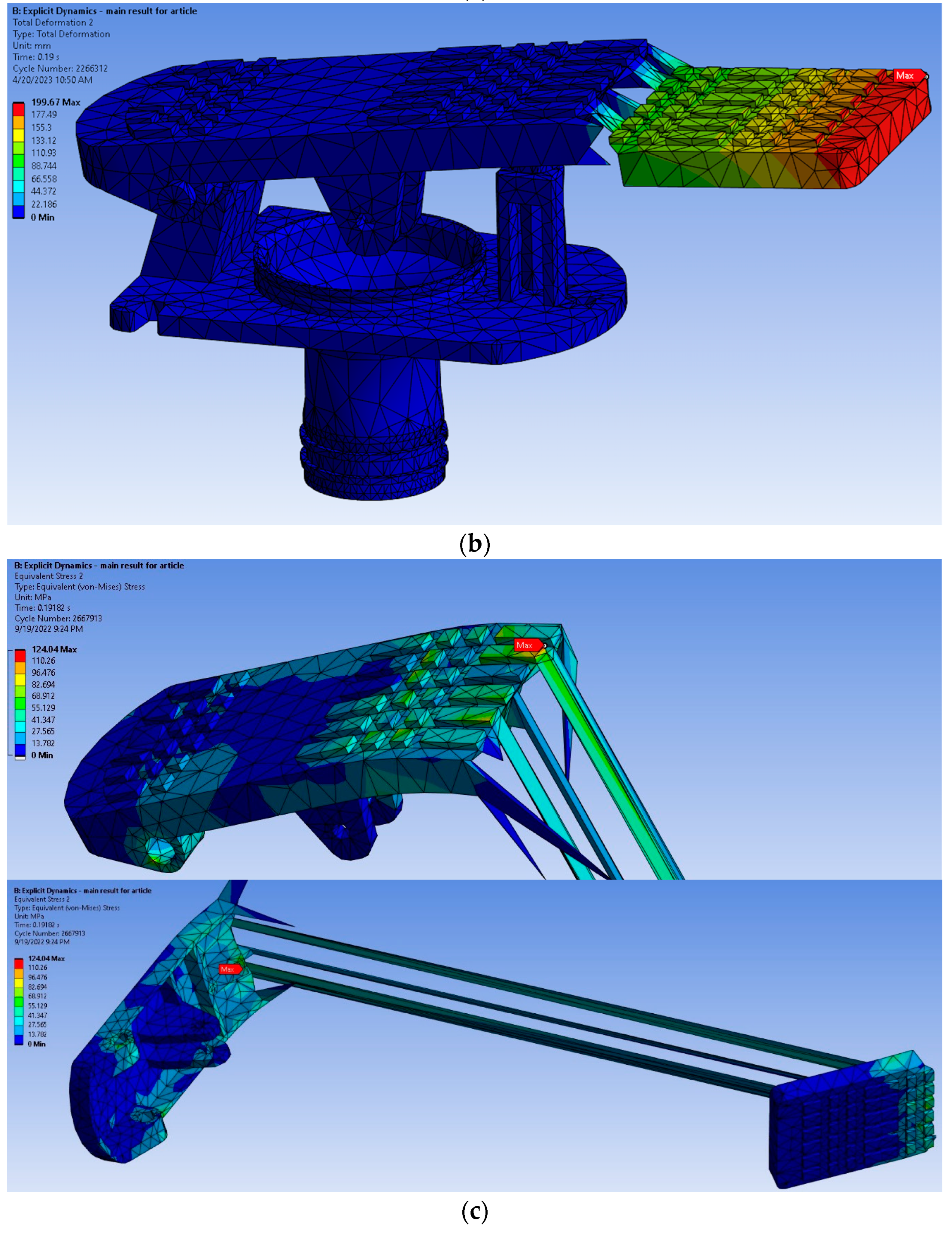
- Between lines 2 and 3, short-term plastic deformations are observed (the graph of “Internal energy” goes up), as well as a material rupture (the “Kinetic energy” line rapidly rises, which means the separation of a broken part of the pedal and its further movement). This stage can be further observed in Figure 13.
3. Results
3.1. Direct Task
3.2. Inverse Task
3.3. Hybrid Task
3.4. Shock Load Task
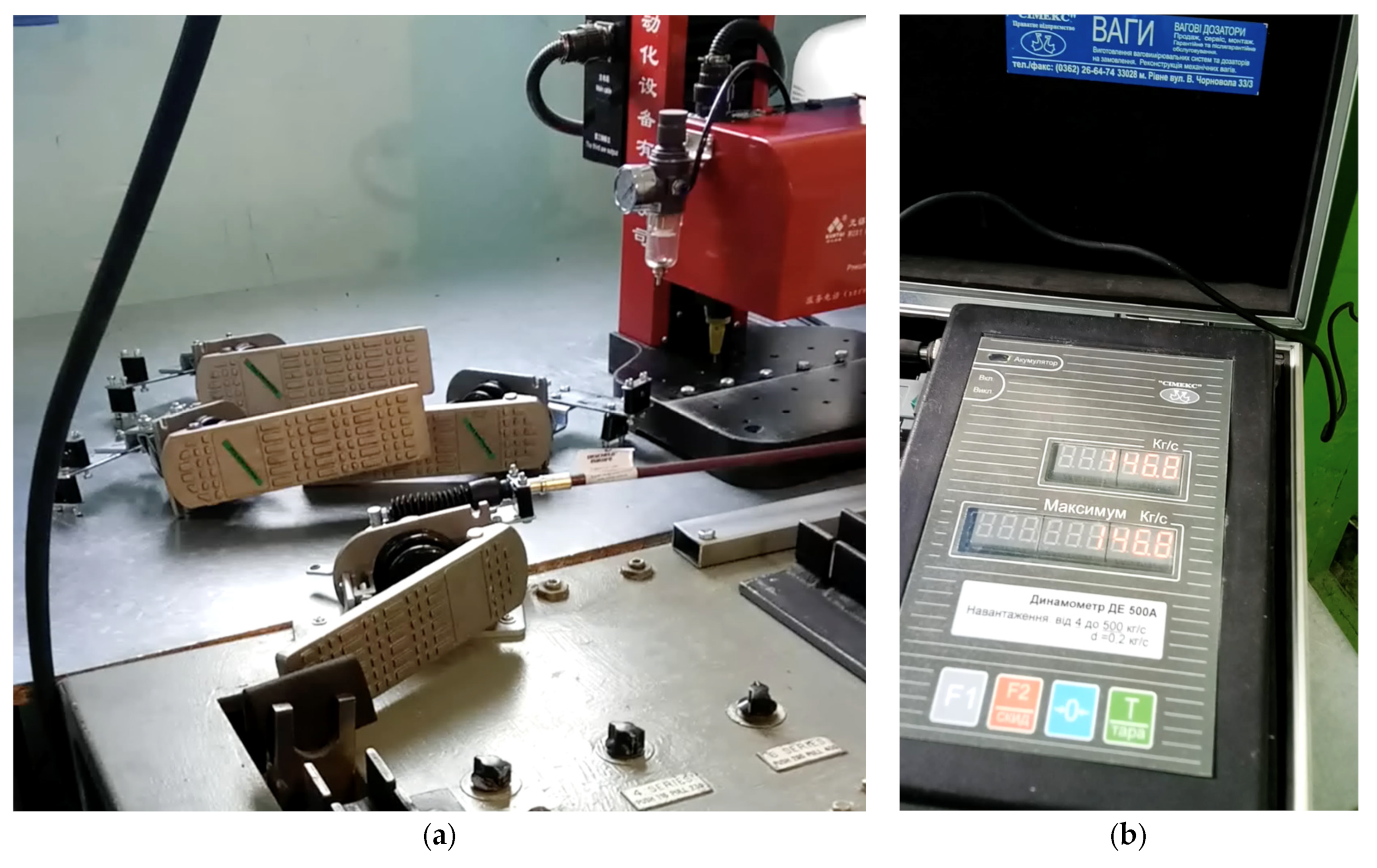
4. Experimental Test
5. Discussion
6. Conclusions
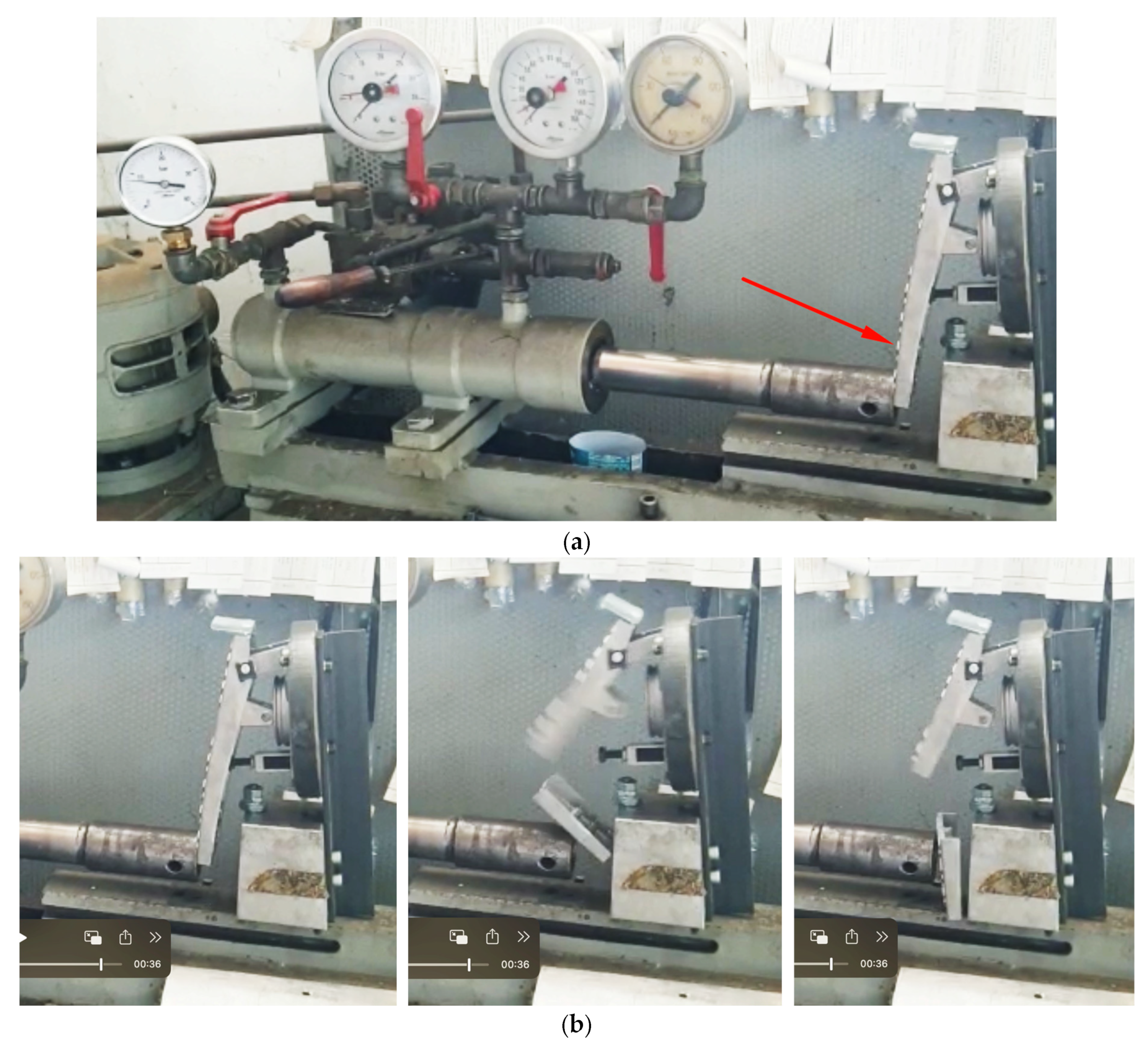
- The obtained concordance of results between experimental and simulated tests (less than 10%) indicates the sufficient economic efficiency of the pedal behavior research methodology proposed in the work.
- The studied method will be useful for design studios, where engineers are involved in the development of new pedals, and in workplace layout investigations. At the same time, the theoretical knowledge presented in the article regarding the explicit and implicit approaches in FEA leads to the idea that the explicit-type calculations used in Ansys are very resource-intensive: they require a setting of a very small time step and a huge number of iterations; thus, the calculation requires a lot of hours on sufficiently powerful equipment. For this reason, an optimization of the structure and strength of the pedal in the Ansys Transient Structural environment is first recommended, and then the use of the Explicit Dynamic environment just at the final stage, for crash tests.
- The lack of regulatory requirements for the strength of pedal types other than brake pedals is a major gap in vehicle certification, especially when it comes to agricultural machinery (such as tractor K 744R, as in the presented study). In such cases, the authors suggest being guided by UNECE R 13 regarding the strength of the accelerator and other types of pedals, and checking their behavior under loads of at least 1000 N. The studied pedal, EAAH-MFP02-2340, used on tractor K 744R, withstood over twice the standard load (2255 N), which coincided with experimental studies within a 10% margin of error.
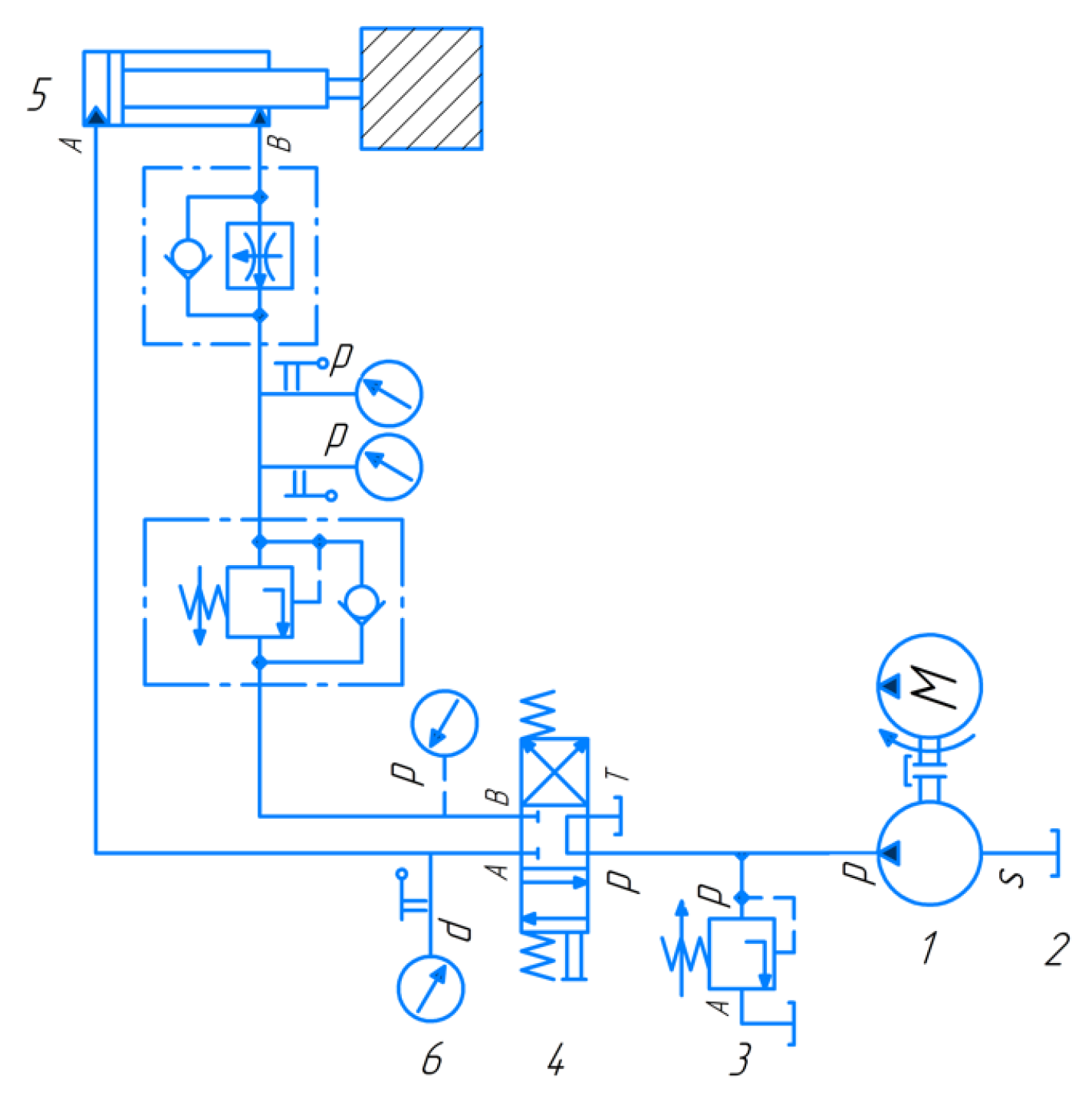
- For a comprehensive assessment of the pedal’s strength, its behavior must be modeled in complex, taking into account the simulation of the cable and the corresponding executive unit along with the application of reactions and other boundary conditions. Determining the failure loads is not a sufficient result; it is also necessary to check the intermediate stress values depending on the loads. For this, it is advisable to carry out calculations for direct and hybrid tasks using the Transient Structural module. The Explicit Dynamics module should be used for the simulation of pedal rupture (stress was 124 MPa, which exceeded the yield point).
- The real meaning of the yield strength of the material (Silumin 4000, in our case) is very important, both in the physical real-life experiments and in the FEA imitation. The way the casting was produced (free cast or under high pressure) significantly influences the total strength of the pedal and its safety margin; hence, it could be suggested to apply an ultimate strength condition based on yield strength and to install a tensor strain gauge on the pedal, which would break off in case the load exceeds 1000 N. This strain gauge could be recommended to be installed on each pedal and its investigation could be the topic of further research.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- DSTU UN/ECE R 13-09:2002; Derzhavni Standarty Ukrainy. Uniform Technical Prescriptions for the Official Approval of Road Vehicles of Categories M, N and O with Regard to Braking. UNECE Rules No. 13-09:2002. IDT: Kyiv, Ukraine, 2002.
- Deng, T.M.; Fu, J.H.; Shao, Y.M.; Peng, J.S.; Xu, J. Pedal operation characteristics and driving workload on slopes of mountainous road based on naturalistic driving tests. Saf. Sci. 2018, 119, 40–49. [Google Scholar] [CrossRef]
- DSTU UN/ECE R 35-00:2002; Derzhavni Standarty Ukrainy. The Only Technical Prescriptions for the Official Approval of Road Vehicles Regarding the Placement of Control Pedals. UNECE Rules No. 35-00:2002. IDT: Kyiv, Ukraine, 2002.
- Chen, L.; Li, W.; Yang, Y.; Miao, W. Evaluation and optimization of vehicle pedal comfort based on biomechanics. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 1402–1412. [Google Scholar] [CrossRef]
- Reddy, P.; Ramakrishna, A.; Ramji, K. Study of the dynamic behavior of a human driver coupled with a vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2014, 229, 226–234. [Google Scholar] [CrossRef]
- Du, X.; Ren, J.; Sang, C.; Li, L. Simulation of the interaction between driver and seat. Chin. J. Mech. Eng. 2013, 26, 1234–1242. [Google Scholar] [CrossRef]
- Xi, Y.; Brooks, J.; Venhovens, P.; Rosopa, P.; DesJardins, J.; McConomy, S.; Belle, L.; Drouin, N.; Hennessy, S.; Kopera, K.; et al. Understanding the Automotive Pedal Usage and Foot Movement Characteristics of Older Drivers; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2018; Technical Paper 2018-01-0495. [Google Scholar] [CrossRef]
- Rantaharju, T.; Mansfield, N.; Ala-Hiiro, J.; Gunston, T. Predicting the health risks related to whole-body vibration and shock: A comparison of alternative assessment methods for high-acceleration events in vehicles. Ergonomics 2014, 58, 1071–1087. [Google Scholar] [CrossRef] [PubMed]
- Ergenc, A.F.; Ergenc, A.T.; Kale, S.; Sahin, I.G.; Dagdelen, K.; Pestelli, V.; Yontem, O.; Kuday, B. Reduced weight automotive brake pedal test & analysis. Int. J. Automot. Sci. Technol. 2017, 1, 8–13. Available online: https://dergipark.org.tr/en/pub/ijastech/issue/31069/304232 (accessed on 30 September 2017).
- Cerilles, J.T. Measurement and Control of Brake Pedal Feel Quality in Automobile Manufacturing. Master’s Thesis, Massachusetts Institute of Technology, Cambridge, MA, USA, 2005. Available online: http://hdl.handle.net/1721.1/34839 (accessed on 8 November 2006).
- Noh, B.; Choi, Y.; Bae, S. A Study on Load Analysis and Durability Test Condition of Automobile Brake Pedal. Key Eng. Mater. 2006, 324–325, 1273–1276. [Google Scholar]
- Dhande, K.K.; Jamadar, N.I.; Ghatge, S. Conceptual Design and Analysis of Brake Pedal Profile. IJIRSET 2014, 3, 17432–17441. [Google Scholar] [CrossRef]
- Setién, J.; González, J.; Polanco, J. Cracking diagnostics of brake pedals during press forming operations. Eng. Fail. Anal. 2000, 7, 69–74. [Google Scholar] [CrossRef]
- Hfaiedh, N.; Peyre, P.; Song, H.; Popa, I.; Ji, V.; Vignal, V. Finite element analysis of laser shock peening of 2050-T8 aluminum alloy. Int. J. Fatigue 2015, 70, 480–489. [Google Scholar] [CrossRef]
- Lee, S.H.; Park, T.W.; Jung, I.H.; Seo, J.H. Development of Automotive Braking Performance Analysis Program Considering Dynamic Characteristics. Trans. KSAE 2004, 12, 175–181. [Google Scholar]
- Gnedin, N.; Semenov, V.; Kravtsov, A. Enforcing the Courant-Friedrichs-Lewy Condition in Explicitly Conservative Local Time Stepping Schemes. J. Comput. Phys. 2018, 359, 93–105. [Google Scholar] [CrossRef]
- Kim, R.; Suh, J.; Shin, D.; Lee, K.H.; Seung-Hoon, B.; Cho, D.W.; Yi, W.G. FE Analysis of Laser Shock Peening on STS304 and the Effect of Static Damping on the Solution. Metals 2021, 11, 1516. [Google Scholar] [CrossRef]
- Jung, S.P.; Jun, K.J.; Park, T.W. Development of the brake system design program for a vehicle. Int. J. Automot. Technol. 2008, 9, 45–51. [Google Scholar] [CrossRef]
- Romero, J.; Queipo, N. Reliability-based and deterministic design optimization of a FSAE brake pedal: A risk allocation analysis. Struct. Multidisc. Optim. 2017, 56, 681–695. [Google Scholar] [CrossRef]
- Balakrishnan, K.; Sharma, A.; Ali, R. Comparison of Explicit and Implicit Finite Element Methods and its Effectiveness for Drop Test of Electronic Control Unit. Procedia Eng. 2017, 173, 424–431. [Google Scholar] [CrossRef]
- Khandani, H. A convergence condition for Newton-Raphson method. arXiv 2021, arXiv:2112.04898. [Google Scholar]




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Density | 2650 kg/m3 |
| Poisson’s ratio | 0.33 |
| Young’s modulus | 71 GPa |
| Yield strength | 120–180 MPa |
| Tensile strength | 210 MPa |
| Quality Criterion | Warning (Target) Limit | Error (Failure) Limit | % Warning | # Warning | % Failed | #Failed | Worst |
|---|---|---|---|---|---|---|---|
| Min Element Quality | Default (0.2) | Default (5 × 10−4) | 0.179% | 23 | 0% | 0 | 0.155 |
| Max Aspect Ratio (Explicit) | Default (5) | Default (1000) | 0.529% | 68 | 0% | 0 | 6.744 |
| Min Characteristic Length (LS-DYNA) | Default (0.78 mm) | Default (0.078 mm) | 0.327% | 42 | 0% | 0 | 0.559 mm |
| Min Tet Collapse | Default (0.1) | Default (1 × 10−3) | 0.000% | 0 | 0% | 0 | 0.165 |
| Pedal Breaking Stress, MPa | Pedal Breaking Load, N | Error ∆, % | ||
|---|---|---|---|---|
| Yield Stress of Silumin | Calculated | Experimental | Calculated | |
| 120 | 124 | 2255.5 | 2500 | 9.8% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Holenko, K.; Koda, E.; Kernytskyy, I.; Babak, O.; Horbay, O.; Popovych, V.; Chalecki, M.; Leśniewska, A.; Berezovetskyi, S.; Humeniuk, R. Evaluation of Accelerator Pedal Strength under Critical Loads Using the Finite Element Method. Appl. Sci. 2023, 13, 6684. https://doi.org/10.3390/app13116684
Holenko K, Koda E, Kernytskyy I, Babak O, Horbay O, Popovych V, Chalecki M, Leśniewska A, Berezovetskyi S, Humeniuk R. Evaluation of Accelerator Pedal Strength under Critical Loads Using the Finite Element Method. Applied Sciences. 2023; 13(11):6684. https://doi.org/10.3390/app13116684
Chicago/Turabian StyleHolenko, Kostyantyn, Eugeniusz Koda, Ivan Kernytskyy, Oleg Babak, Orest Horbay, Vitalii Popovych, Marek Chalecki, Aleksandra Leśniewska, Serhii Berezovetskyi, and Ruslan Humeniuk. 2023. "Evaluation of Accelerator Pedal Strength under Critical Loads Using the Finite Element Method" Applied Sciences 13, no. 11: 6684. https://doi.org/10.3390/app13116684
APA StyleHolenko, K., Koda, E., Kernytskyy, I., Babak, O., Horbay, O., Popovych, V., Chalecki, M., Leśniewska, A., Berezovetskyi, S., & Humeniuk, R. (2023). Evaluation of Accelerator Pedal Strength under Critical Loads Using the Finite Element Method. Applied Sciences, 13(11), 6684. https://doi.org/10.3390/app13116684