
Exploring Prior Knowledge from Human Mobility Patterns for POI Recommendation



Abstract
1. Introduction
- (1)
- We propose the Human Mobility Pattern Extraction (HMPE) architecture to learn human mobility patterns and extract their representation.
- (2)
- We design a traffic congestion prediction task and conduct experiments on a real taxi dataset from New York, which verifies the feasibility of using an end-to-end architecture to learn human mobility patterns.
- (3)
- We propose a Point of Interest recommendation algorithm called Human Mobility Recommendation (HMRec), which incorporates prior knowledge of human mobility patterns.
- (4)
- We conduct a comparative experiment on the Foursquare dataset, and the experimental results validate the effectiveness of prior knowledge of human mobility patterns.
2. Related Work
2.1. POI Recommendation
2.2. Human Mobility Pattern
3. Methodology
3.1. Human Mobility Pattern Discovery
3.1.1. Spatio-Temporal Graph
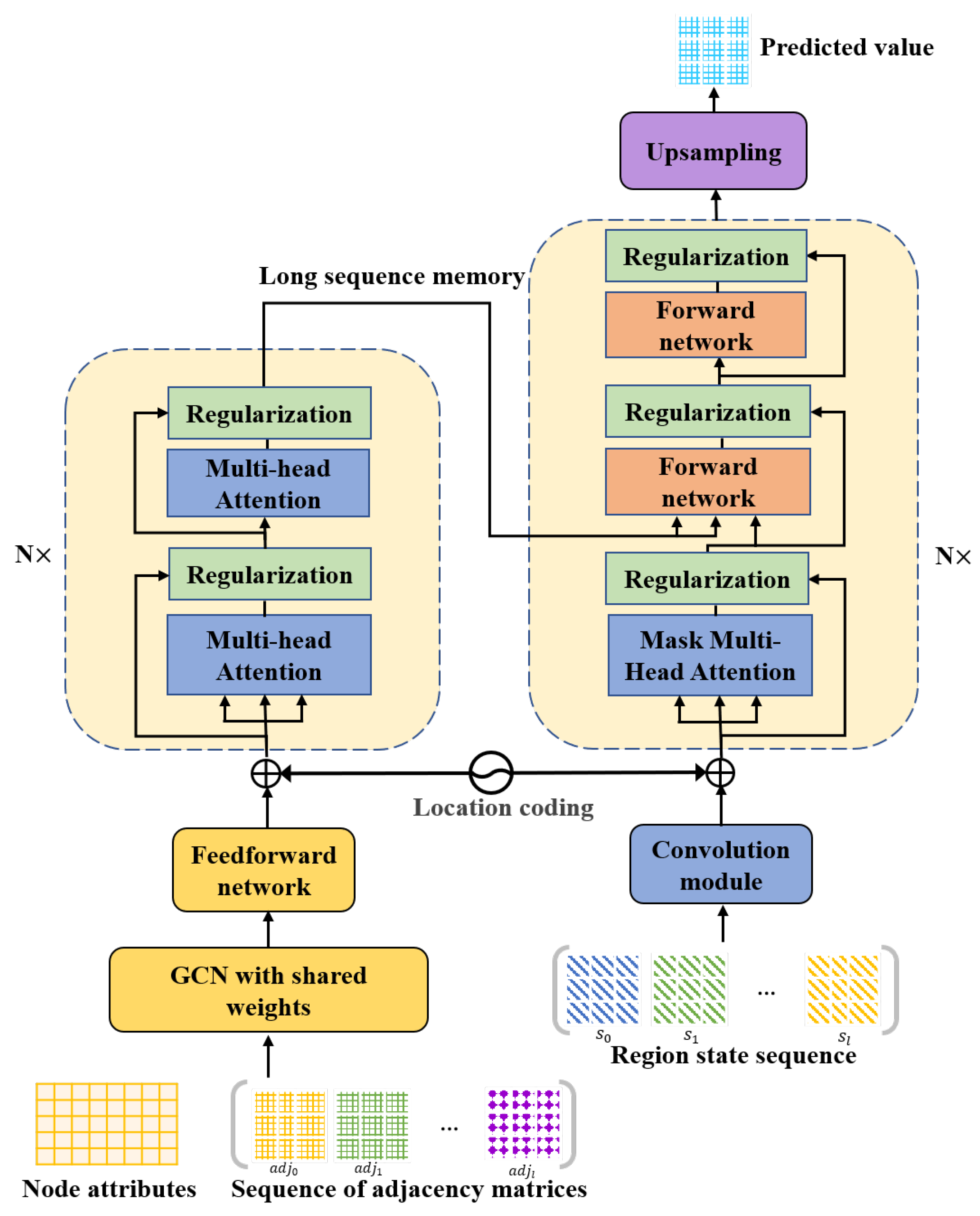
3.1.2. Human Mobility Pattern Discovery Architecture
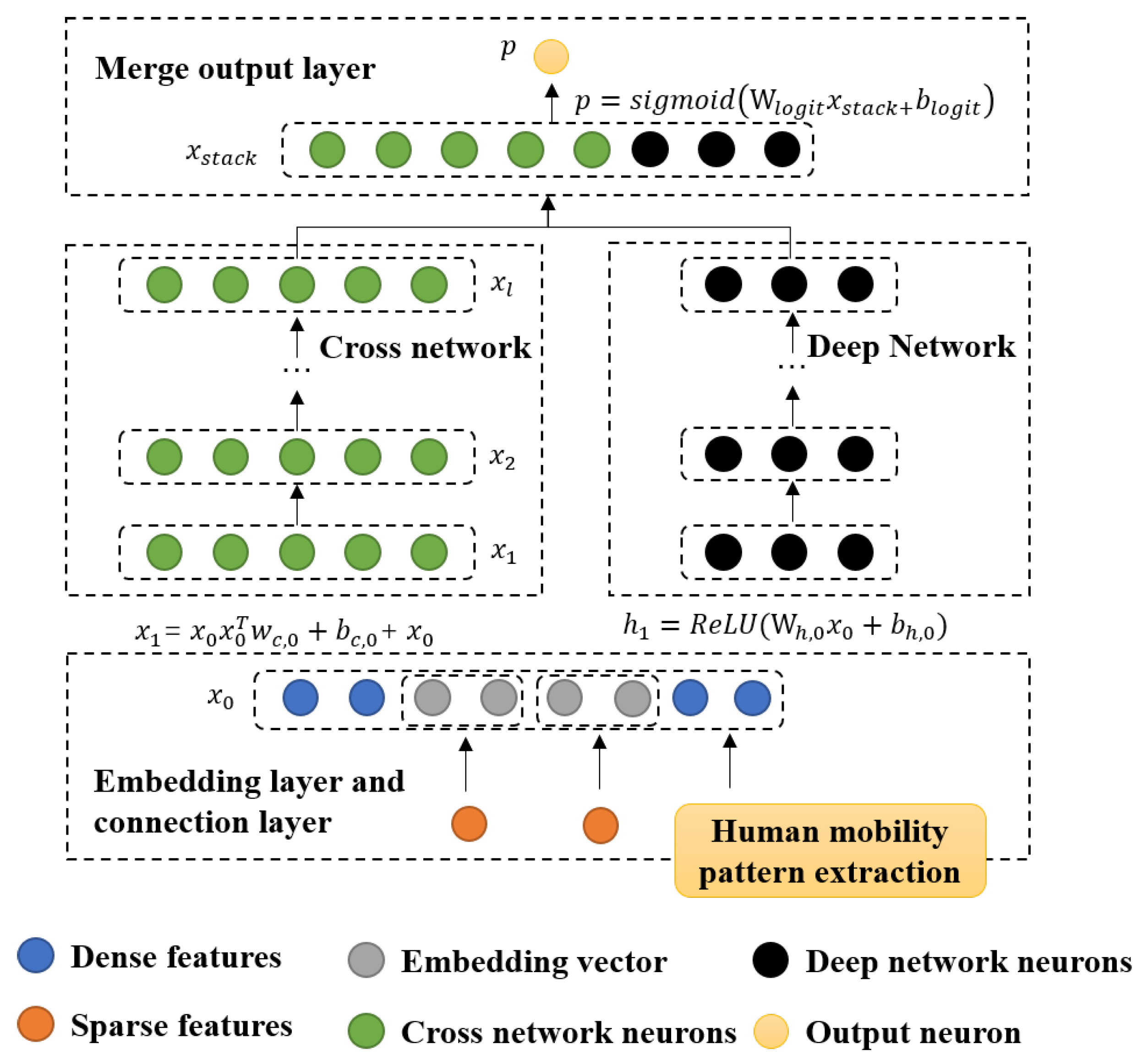
3.2. POI Recommendation Algorithm Based on Human Mobility Patterns
| Algorithm 1 HMRec Algorithm |
| Input: Features of urban human mobility pattern , point of interest , user , dense features , discrete features Output: The predicted score p of user j checking in at POI i Part I: Cross Layer 1: transform the discrete features into the dense features: 2: splice dense features: 3: using deep networks to fuse dense features: 4: get dense features: Part II: Deep Layer 5: discrete feature multi-layer high-order intersection: 6: connect the Deep network and cross network and output: 7: return return predicted score |
4. Results and Discussion
4.1. Urban Traffic Congestion Status Assessment Task
4.2. POI Recommendation Based on Human Mobility Pattern
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, Y.; Sotiriadis, M.; Shen, S. Investigating the Impact of Smart Tourism Technologies on Tourists’ Experiences. Sustainability 2022, 14, 3048. [Google Scholar] [CrossRef]
- Kong, X.; Huang, Z.; Shen, G.; Lin, H.; Lv, M. Urban Overtourism Detection Based on Graph Temporal Convolutional Networks. IEEE Trans. Comput. Soc. Syst. 2022. early access. [Google Scholar] [CrossRef]
- Wang, W.; Kumar, N.; Chen, J.; Gong, Z.; Kong, X.; Wei, W.; Gao, H. Realizing the potential of the internet of things for smart tourism with 5G and AI. IEEE Netw. 2020, 34, 295–301. [Google Scholar] [CrossRef]
- Kong, X.; Wu, Y.; Wang, H.; Xia, F. Edge Computing for Internet of Everything: A Survey. IEEE Internet Things J. 2022, 9, 23472–23485. [Google Scholar] [CrossRef]
- Wu, X.; Fu, L.; Wang, S.; Jiang, B.; Wang, X.; Chen, G. Collective Influence Maximization in Mobile Social Networks. IEEE Trans. Mob. Comput. 2021, 22, 797–812. [Google Scholar] [CrossRef]
- Li, D.; Gong, Z. A deep neural network for crossing-city poi recommendations. IEEE Trans. Knowl. Data Eng. 2020, 34, 3536–3548. [Google Scholar] [CrossRef]
- Fang, J.; Meng, X.; Qi, X. A top-k POI recommendation approach based on LBSN and multi-graph fusion. Neurocomputing 2023, 518, 219–230. [Google Scholar] [CrossRef]
- Wang, X.; Qin, J.; Deng, S.; Zeng, W. Knowledge-Aware Enhanced Network Combining Neighborhood Information for Recommendations. Appl. Sci. 2023, 13, 4577. [Google Scholar] [CrossRef]
- Gao, Q.; Wang, W.; Huang, L.; Yang, X.; Li, T.; Fujita, H. Dual-grained human mobility learning for location-aware trip recommendation with spatial–temporal graph knowledge fusion. Inf. Fusion 2023, 92, 46–63. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Z.; Li, T.; Wu, D. A novel POI recommendation model based on joint spatiotemporal effects and four-way interaction. Appl. Intell. 2022, 52, 5310–5324. [Google Scholar] [CrossRef]
- Zhang, J.; Shi, W.; Xiu, C. Application of POI data in Chinese urban research. Geogr. Sci. 2021, 41, 140–148. [Google Scholar]
- Berjani, B.; Strufe, T. A recommendation system for spots in location-based online social networks. In Proceedings of the 4th Workshop on Social Network Systems, Salzburg, Austria, 10 April 2011; pp. 1–6. [Google Scholar]
- Yu, Y.; Chen, X. A survey of point-of-interest recommendation in location-based social networks. In Proceedings of the Workshops at the Twenty-Ninth AAAI Conference on Artificial Intelligence, Austin, TX, USA, 25–30 January 2015. [Google Scholar]
- Si, Y.; Zhang, F.; Liu, W. An adaptive point-of-interest recommendation method for location-based social networks based on user activity and spatial features. Knowl.-Based Syst. 2019, 163, 267–282. [Google Scholar] [CrossRef]
- Liu, W.; Wang, Z.J.; Yao, B.; Yin, J. Geo-ALM: POI Recommendation by Fusing Geographical Information and Adversarial Learning Mechanism. In Proceedings of the IJCAI, Macao, China, 10–16 August 2019; Volume 7, pp. 1807–1813. [Google Scholar]
- Lu, L.U.; Zhu, F.; Gao, R.; Zhu, L. Point of interest joint recommendation method based on user-content topic model. Comput. Eng. Appl. 2018, 54, 154–159. [Google Scholar]
- Zhang, Z.; Liu, Y.; Zhang, Z.; Shen, B. Fused matrix factorization with multi-tag, social and geographical influences for POI recommendation. World Wide Web 2019, 22, 1135–1150. [Google Scholar] [CrossRef]
- Zhang, S.; Cheng, H. Exploiting context graph attention for poi recommendation in location-based social networks. In Lecture Notes in Computer Science, Database Systems for Advanced Applications, Proceedings of the 23rd International Conference, DASFAA 2018, Gold Coast, QLD, Australia, 21–24 May 2018; Springer: Cham, Switzerland, 2018; pp. 83–99. [Google Scholar]
- Wang, Z.; Zhu, Y.; Zhang, Q.; Liu, H.; Wang, C.; Liu, T. Graph-enhanced spatial-temporal network for next POI recommendation. ACM Trans. Knowl. Discov. Data 2022, 16, 1–21. [Google Scholar] [CrossRef]
- Ning, Z.; Yang, Y.; Wang, X.; Guo, L.; Gao, X.; Guo, S.; Wang, G. Dynamic computation offloading and server deployment for UAV-enabled multi-access edge computing. IEEE Trans. Mob. Comput. 2021, 22, 2628–2644. [Google Scholar] [CrossRef]
- Wang, X.; Ning, Z.; Guo, S.; Wen, M.; Poor, H.V. Minimizing the age-of-critical-information: An imitation learning-based scheduling approach under partial observations. IEEE Trans. Mob. Comput. 2021, 21, 3225–3238. [Google Scholar] [CrossRef]
- Zhang, H.; Zheng, Y.; Yu, Y. Detecting urban anomalies using multiple spatio-temporal data sources. Proc. ACM Interact. Mob. Wearable Ubiquitous Technol. 2018, 2, 1–18. [Google Scholar] [CrossRef]
- Liu, X.; Wang, M.; Zha, Z.J.; Hong, R. Cross-modality feature learning via convolutional autoencoder. ACM Trans. Multimed. Comput. Commun. Appl. 2019, 15, 1–20. [Google Scholar] [CrossRef]
- Das, S.; Dutta, S. A Fusion Approach for Collaborative Filtering. In Proceedings of the 2019 3rd International Conference on Innovation in Artificial Intelligence, Medan, Indonesia, 19–20 July 2019; pp. 263–269. [Google Scholar]
- Long, J.; Chen, T.; Nguyen, Q.V.H.; Yin, H. Decentralized collaborative learning framework for next POI recommendation. ACM Trans. Inf. Syst. 2023, 41, 1–25. [Google Scholar] [CrossRef]
- Cai, Z.; Yuan, G.; Qiao, S.; Qu, S.; Zhang, Y.; Bing, R. FG-CF: Friends-aware graph collaborative filtering for POI recommendation. Neurocomputing 2022, 488, 107–119. [Google Scholar] [CrossRef]
- Li, T.; Zhang, J.; Bao, K.; Liang, Y.; Li, Y.; Zheng, Y. Autost: Efficient neural architecture search for spatio-temporal prediction. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, 6–10 July 2020; pp. 794–802. [Google Scholar]
- Wang, D.; Liu, K.; Mohaisen, D.; Wang, P.; Lu, C.T.; Fu, Y. Towards semantically-rich spatial network representation learning via automated feature topic pairing. Front. Big Data 2021, 4, 89. [Google Scholar] [CrossRef]
- Lu, B.; Gan, X.; Jin, H.; Fu, L.; Zhang, H. Spatiotemporal adaptive gated graph convolution network for urban traffic flow forecasting. In Proceedings of the 29th ACM International Conference on Information & Knowledge Management, Virtual Event, 19–23 October 2020; pp. 1025–1034. [Google Scholar]
- Kong, X.; Chen, Q.; Hou, M.; Rahim, A.; Ma, K.; Xia, F. RMGen: A tri-layer vehicular trajectory data generation model exploring urban region division and mobility pattern. IEEE Trans. Veh. Technol. 2022, 71, 9225–9238. [Google Scholar] [CrossRef]
- Yang, S.; Liu, J.; Zhao, K. GETNext: Trajectory flow map enhanced transformer for next POI recommendation. In Proceedings of the 45th International ACM SIGIR Conference on Research and Development in Information Retrieval, Madrid, Spain, 11–15 July 2022; pp. 1144–1153. [Google Scholar]
- Shen, G.; Han, X.; Chin, K.; Kong, X. An attention-based digraph convolution network enabled framework for congestion recognition in three-dimensional road networks. IEEE Trans. Intell. Transp. Syst. 2021, 23, 14413–14426. [Google Scholar] [CrossRef]
- Lu, B.; Gan, X.; Jin, H.; Fu, L.; Wang, X.; Zhang, H. Make more connections: Urban traffic flow forecasting with spatiotemporal adaptive gated graph convolution network. ACM Trans. Intell. Syst. Technol. 2022, 13, 1–25. [Google Scholar] [CrossRef]
- Ning, Z.; Sun, S.; Wang, X.; Guo, L.; Guo, S.; Hu, X.; Hu, B.; Kwok, R.Y. Blockchain-enabled intelligent transportation systems: A distributed crowdsensing framework. IEEE Trans. Mob. Comput. 2021, 21, 4201–4217. [Google Scholar] [CrossRef]
- Kong, X.; Gao, H.; Shen, G.; Duan, G.; Das, S.K. Fedvcp: A federated-learning-based cooperative positioning scheme for social internet of vehicles. IEEE Trans. Comput. Soc. Syst. 2021, 9, 197–206. [Google Scholar] [CrossRef]
- Velickovic, P.; Fedus, W.; Hamilton, W.L.; Liò, P.; Bengio, Y.; Hjelm, R.D. Deep graph infomax. ICLR 2019, 2, 4. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30. [Google Scholar]
- Kong, X.; Wang, K.; Hou, M.; Hao, X.; Shen, G.; Chen, X.; Xia, F. A federated learning-based license plate recognition scheme for 5G-enabled internet of vehicles. IEEE Trans. Ind. Inform. 2021, 17, 8523–8530. [Google Scholar] [CrossRef]
- Chen, L.; Yuan, F.; Yang, J.; He, X.; Li, C.; Yang, M. User-specific Adaptive Fine-tuning for Cross-domain Recommendations. IEEE Trans. Knowl. Data Eng. 2021, 35, 3239–3252. [Google Scholar] [CrossRef]
- Cheng, H.T.; Koc, L.; Harmsen, J.; Shaked, T.; Chandra, T.; Aradhye, H.; Anderson, G.; Corrado, G.; Chai, W.; Ispir, M.; et al. Wide & deep learning for recommender systems. In Proceedings of the 1st Workshop on Deep Learning for Recommender Systems, Boston, MA, USA, 15 September 2016; pp. 7–10. [Google Scholar]
- Wang, R.; Fu, B.; Fu, G.; Wang, M. Deep & cross network for ad click predictions. In Proceedings of the ADKDD’17, Halifax, NS, Canada, 14 August 2017; pp. 1–7. [Google Scholar]
- Kong, X.; Duan, G.; Hou, M.; Shen, G.; Wang, H.; Yan, X.; Collotta, M. Deep reinforcement learning-based energy-efficient edge computing for internet of vehicles. IEEE Trans. Ind. Inform. 2022, 18, 6308–6316. [Google Scholar] [CrossRef]
- Wang, X.; Ning, Z.; Guo, S.; Wen, M.; Guo, L.; Poor, V. Dynamic UAV deployment for differentiated services: A multi-agent imitation learning based approach. IEEE Trans. Mob. Comput. 2021, 22, 2131–2146. [Google Scholar] [CrossRef]
- Grover, A.; Leskovec, J. node2vec: Scalable feature learning for networks. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; pp. 855–864. [Google Scholar]
- Zhang, Z.; Yang, H.; Bu, J.; Zhou, S.; Yu, P.; Zhang, J.; Ester, M.; Wang, C. ANRL: Attributed network representation learning via deep neural networks. In Proceedings of the IJCAI, Stockholm, Sweden, 13–19 July 2018; Volume 18, pp. 3155–3161. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. Imagenet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Cho, K.; Van Merriënboer, B.; Gulcehre, C.; Bahdanau, D.; Bougares, F.; Schwenk, H.; Bengio, Y. Learning phrase representations using RNN encoder-decoder for statistical machine translation. arXiv 2014, arXiv:1406.1078. [Google Scholar]
- Wang, X.; Ning, Z.; Guo, L.; Guo, S.; Gao, X.; Wang, G. Mean-Field Learning for Edge Computing in Mobile Blockchain Networks. IEEE Trans. Mob. Comput. 2022. early access. [Google Scholar] [CrossRef]
- Yang, M.; Qu, Q.; Shen, Y.; Zhao, Z.; Chen, X.; Li, C. An Effective Hybrid Learning Model for Real-Time Event Summarization. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4419–4431. [Google Scholar] [CrossRef]
- Guo, H.; Tang, R.; Ye, Y.; Li, Z.; He, X. DeepFM: A factorization-machine based neural network for CTR prediction. arXiv 2017, arXiv:1703.04247. [Google Scholar]
- He, X.; Liao, L.; Zhang, H.; Nie, L.; Hu, X.; Chua, T.S. Neural collaborative filtering. In Proceedings of the 26th International Conference on World Wide Web, Perth, Australia, 3–7 April 2017; pp. 173–182. [Google Scholar]
- Huang, P.S.; He, X.; Gao, J.; Deng, L.; Acero, A.; Heck, L. Learning deep structured semantic models for web search using clickthrough data. In Proceedings of the 22nd ACM International Conference on Information & Knowledge Management, San Francisco, CA, USA, 27 October–1 November 2013; pp. 2333–2338. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
| Evaluation Indicator | GCN-CNN-Trans | N2V-MLP-Trans | ANRL-MLP-Trans | GCN-MLP-GRU | HMPE |
|---|---|---|---|---|---|
| RMSE | 0.1693 | 0.1517 | 0.1807 | 0.1473 | 0.1466 |
| MAPE | 34.70% | 28.39% | 44.71% | 26.06% | 25.65% |
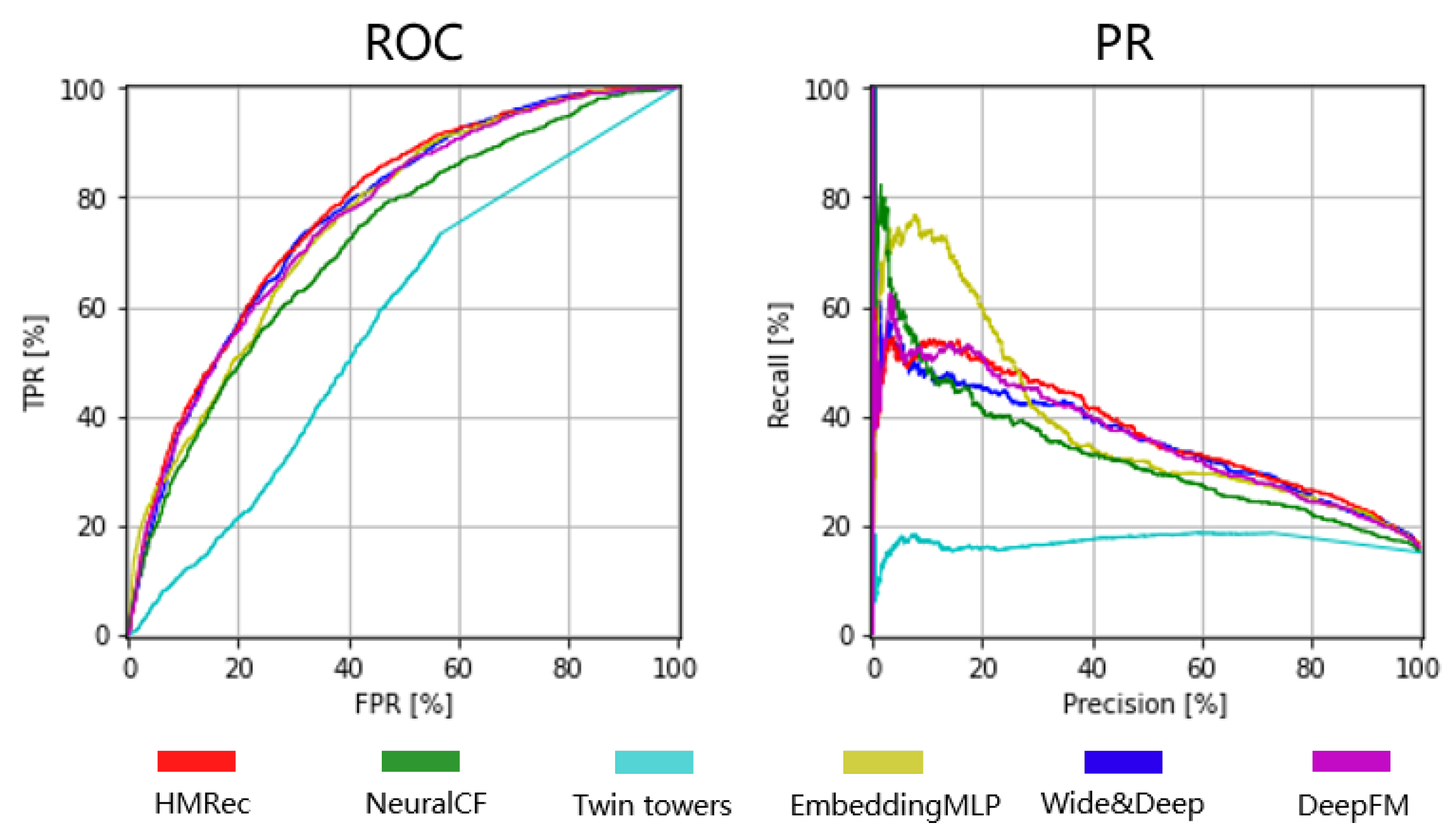
| Model Algorithm | ACC | AUC (ROC) | AUC (PR) |
|---|---|---|---|
| HMRec | 0.8103 | 0.7331 | 0.3558 |
| Wide&Deep | 0.7978 | 0.7271 | 0.3499 |
| DeepFM | 0.8095 | 0.7253 | 0.3610 |
| NeuralCF | 0.7810 | 0.7078 | 0.3097 |
| Twin Towers | 0.6922 | 0.6097 | 0.1781 |
| EmbeddingMLP | 0.7966 | 0.7103 | 0.3302 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, J.; Yi, Q.; Gao, H.; Wang, B.; Kong, X. Exploring Prior Knowledge from Human Mobility Patterns for POI Recommendation. Appl. Sci. 2023, 13, 6495. https://doi.org/10.3390/app13116495
Song J, Yi Q, Gao H, Wang B, Kong X. Exploring Prior Knowledge from Human Mobility Patterns for POI Recommendation. Applied Sciences. 2023; 13(11):6495. https://doi.org/10.3390/app13116495
Chicago/Turabian StyleSong, Jingbo, Qiuhua Yi, Haoran Gao, Buyu Wang, and Xiangjie Kong. 2023. "Exploring Prior Knowledge from Human Mobility Patterns for POI Recommendation" Applied Sciences 13, no. 11: 6495. https://doi.org/10.3390/app13116495
APA StyleSong, J., Yi, Q., Gao, H., Wang, B., & Kong, X. (2023). Exploring Prior Knowledge from Human Mobility Patterns for POI Recommendation. Applied Sciences, 13(11), 6495. https://doi.org/10.3390/app13116495