
Vibration Characteristics and Experimental Research of an Improved Bistable Piezoelectric Energy Harvester

 ,
,  , , and
, , and
Abstract
Featured Application
Abstract
1. Introduction
2. Structure and Mathematic Model
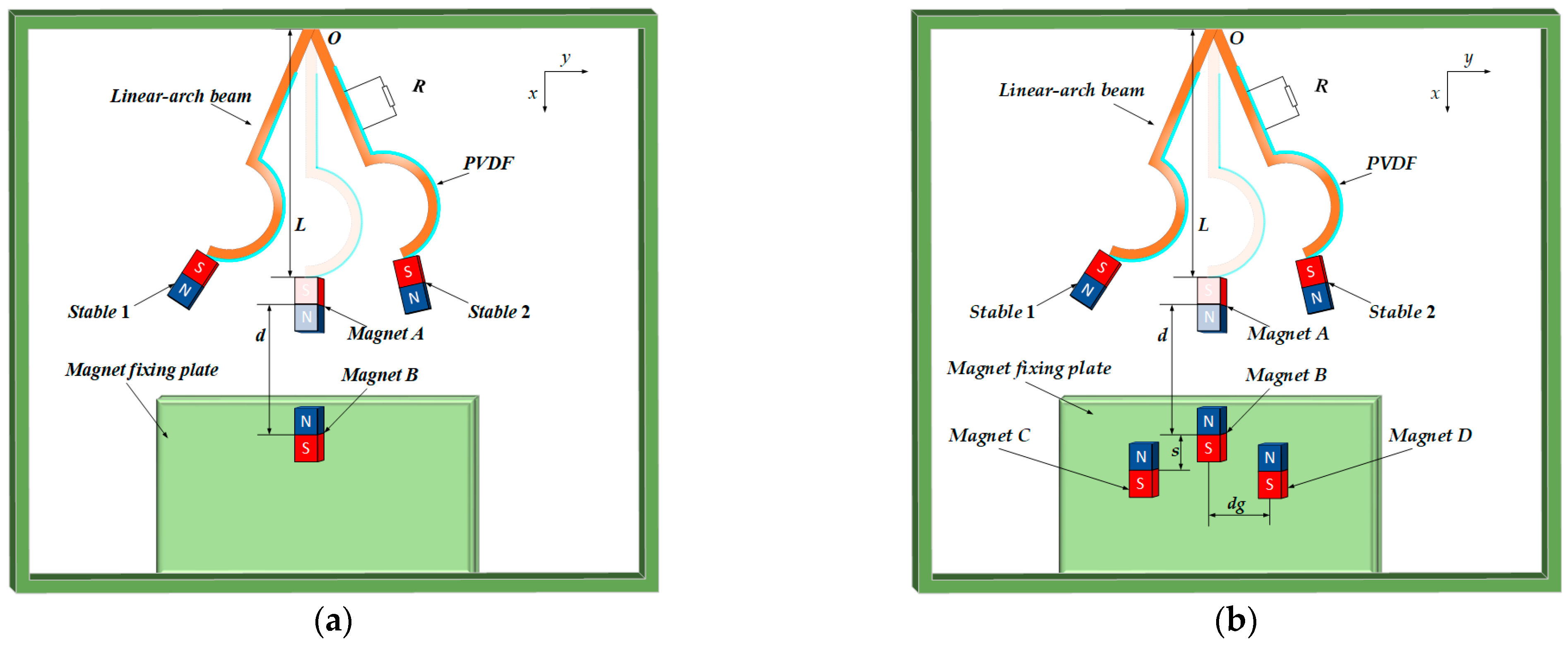
2.1. Structure of the BPEH and IBPEH
2.2. Modeling of Restoring Force
2.3. Modeling of the Nonlinear Magnetic Model
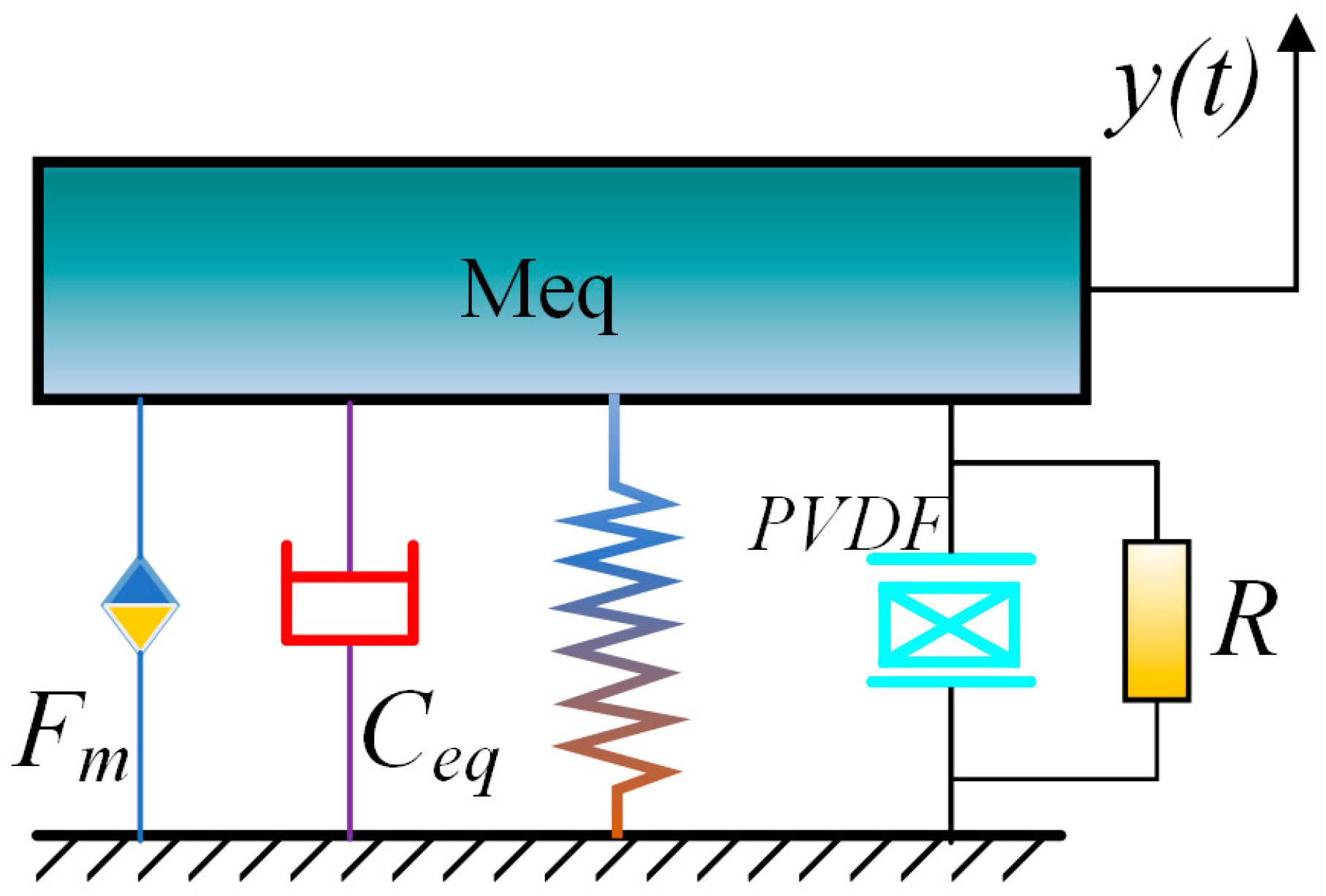
2.4. Dynamic Model of IBPEH
3. Numerical Simulations
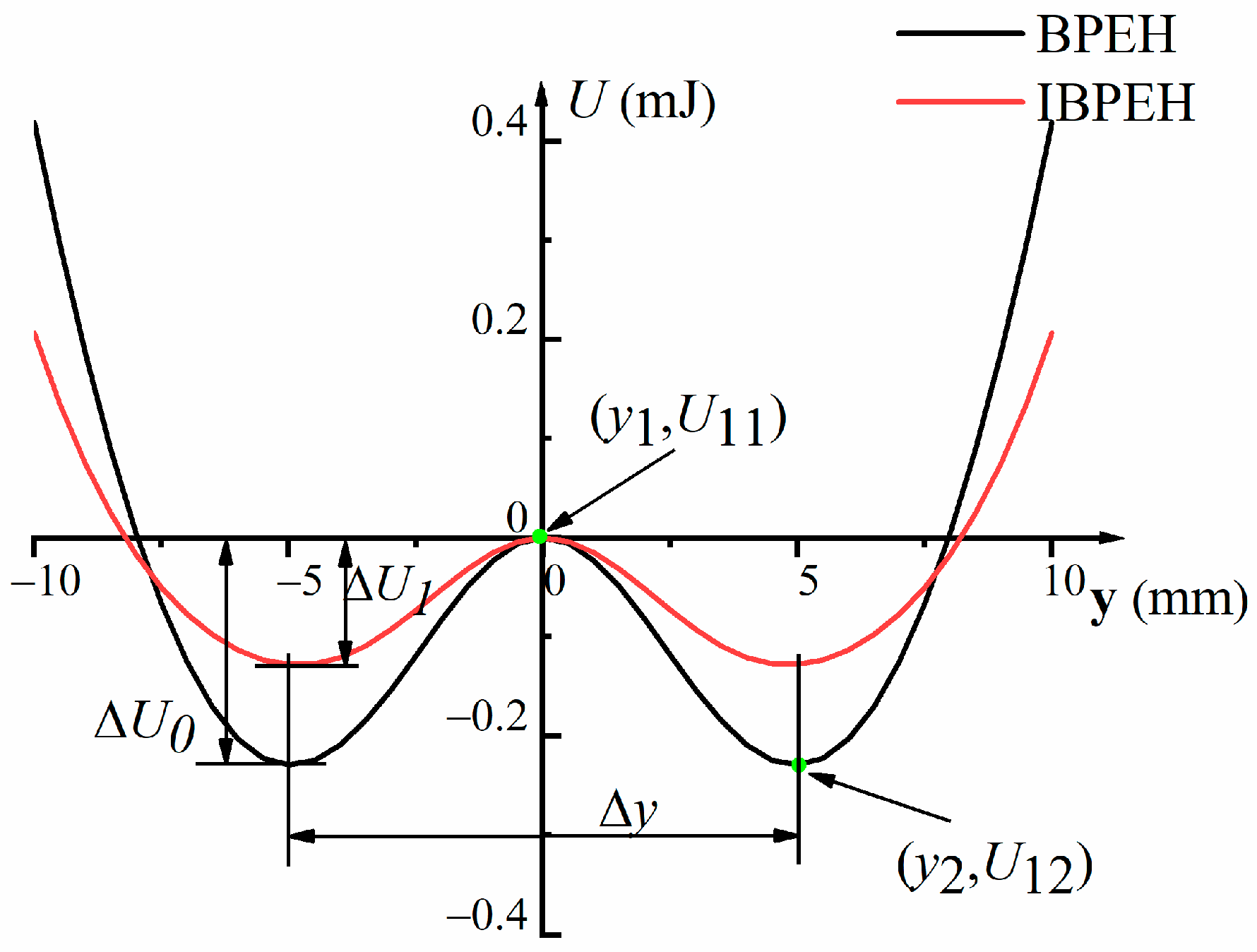
3.1. Potential Energy Analysis of the System
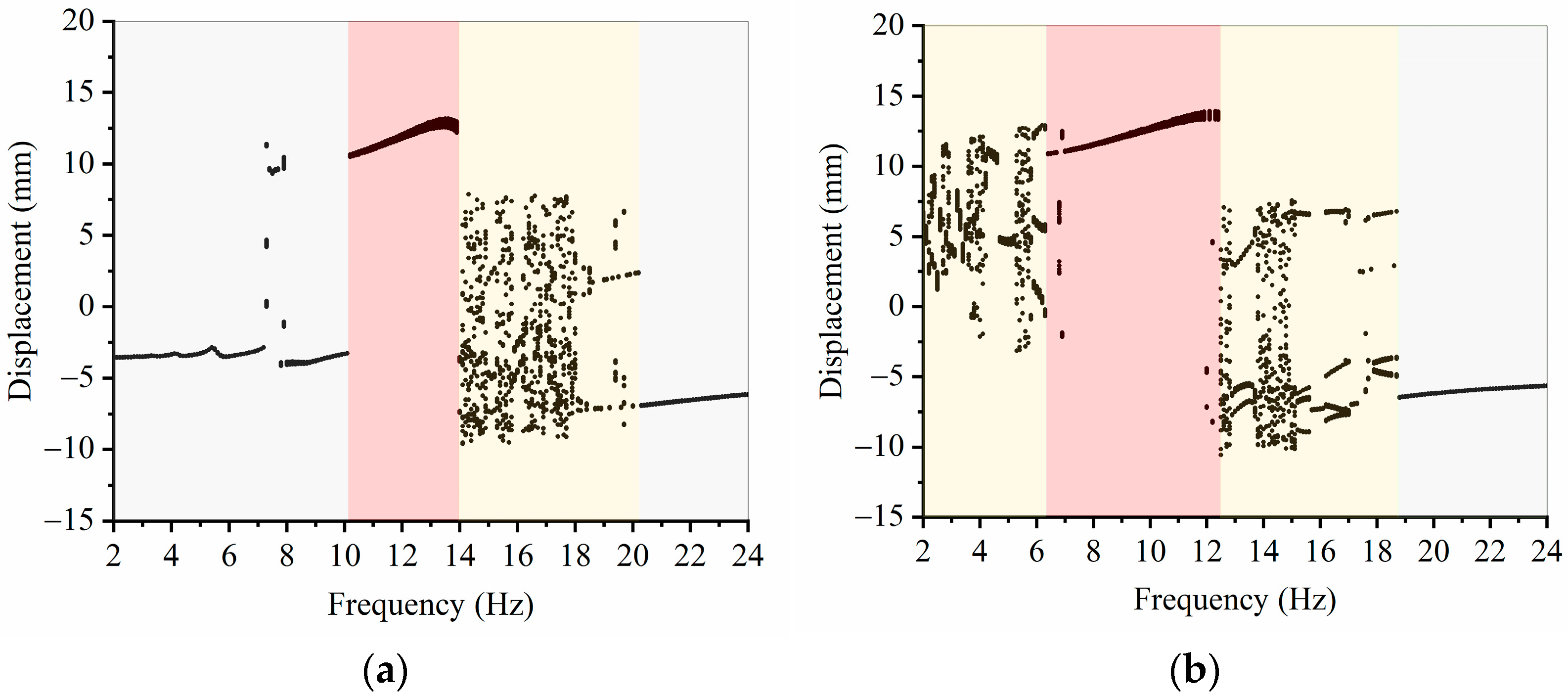
3.2. Influence of Excitation Frequency on Vibration Characteristics
3.3. Influence of Excitation Amplitude on Vibration Characteristics
4. Experimental Validation and Discussion
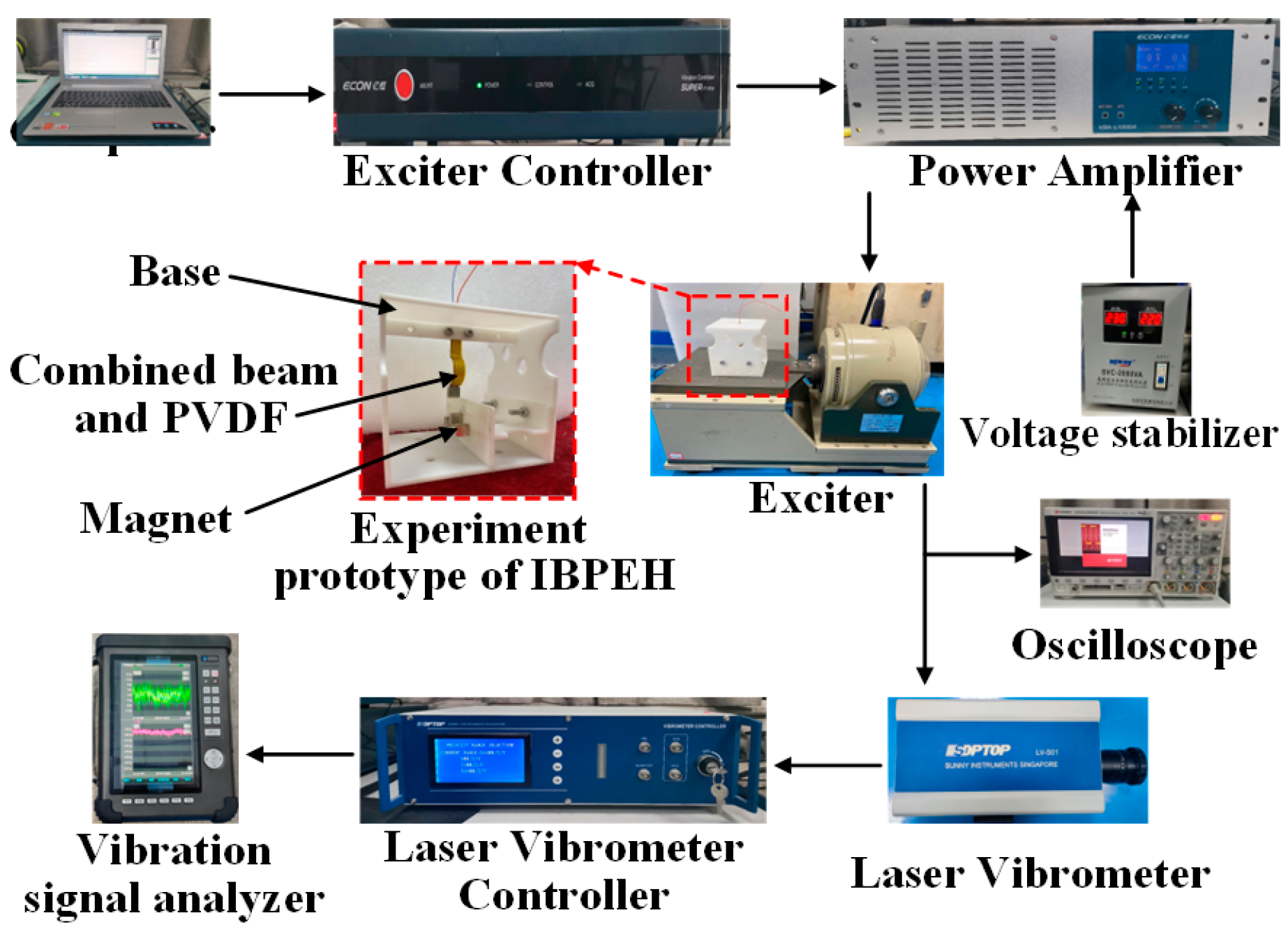
4.1. Experimental Prototype and Experimental Platform
4.2. Discussion of Excitation Frequency on Vibration Characteristics
4.3. Discussion of Excitation Amplitude on Vibration Characteristics
5. Conclusions
- (1)
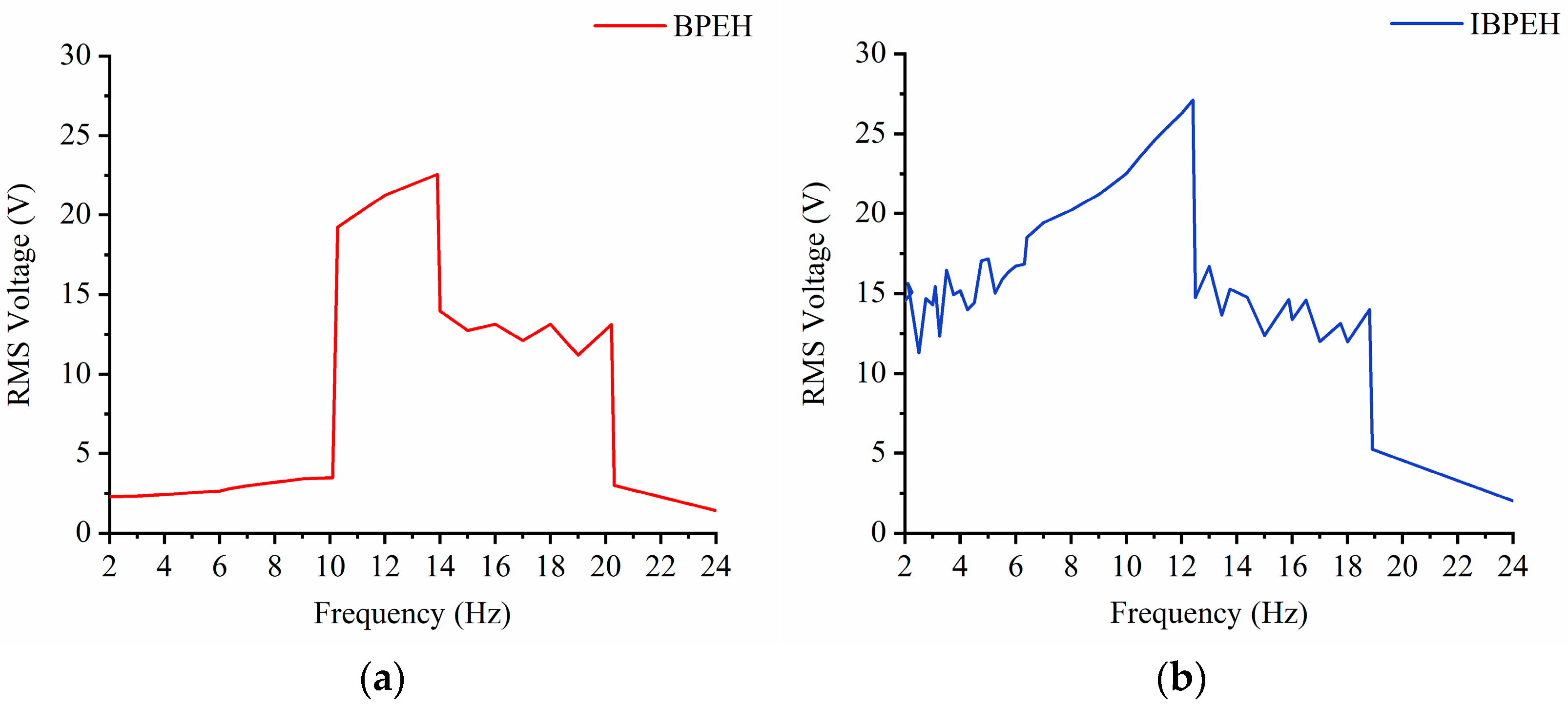
- IBPEH has a wider operating frequency bandwidth. In particular, when the excitation amplitude is 14 m/s2, the operating frequency bandwidth of BPEH is only 3.2 Hz, while that of IBPEH is 6.1 Hz, which is a 93.55% improvement.
- (2)
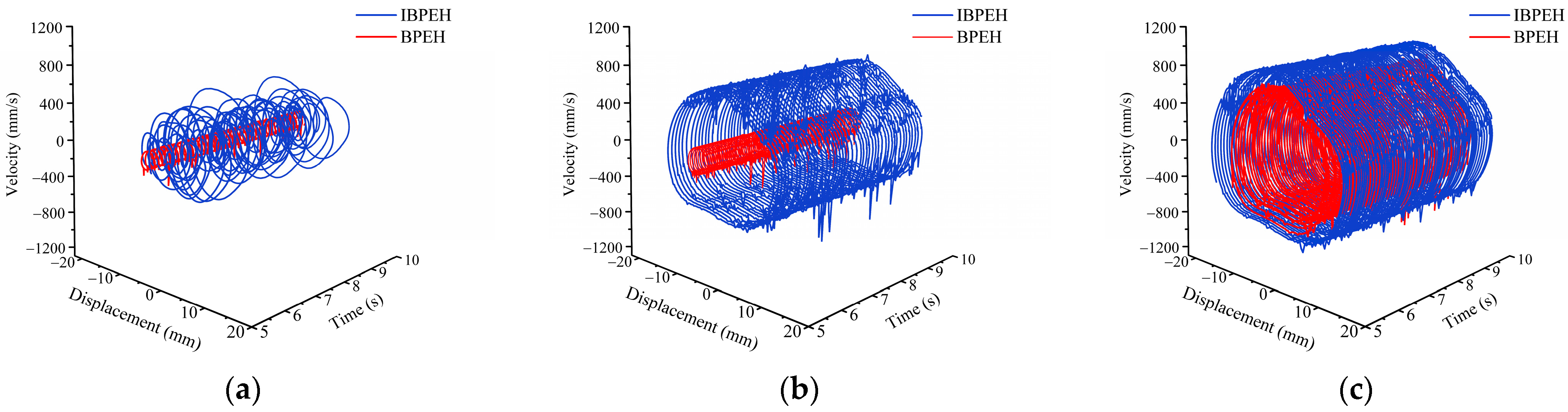
- For BPEH, adding magnets and properly adjusting the magnet spacing can make the potential well of the system shallow, and thus optimize the potential well. Compared with BPEH, IBPEH relieves the low excitation threshold to achieve large amplitude cross-hole periodic motion and can achieve dense high-energy output at low excitation amplitude.
- (3)
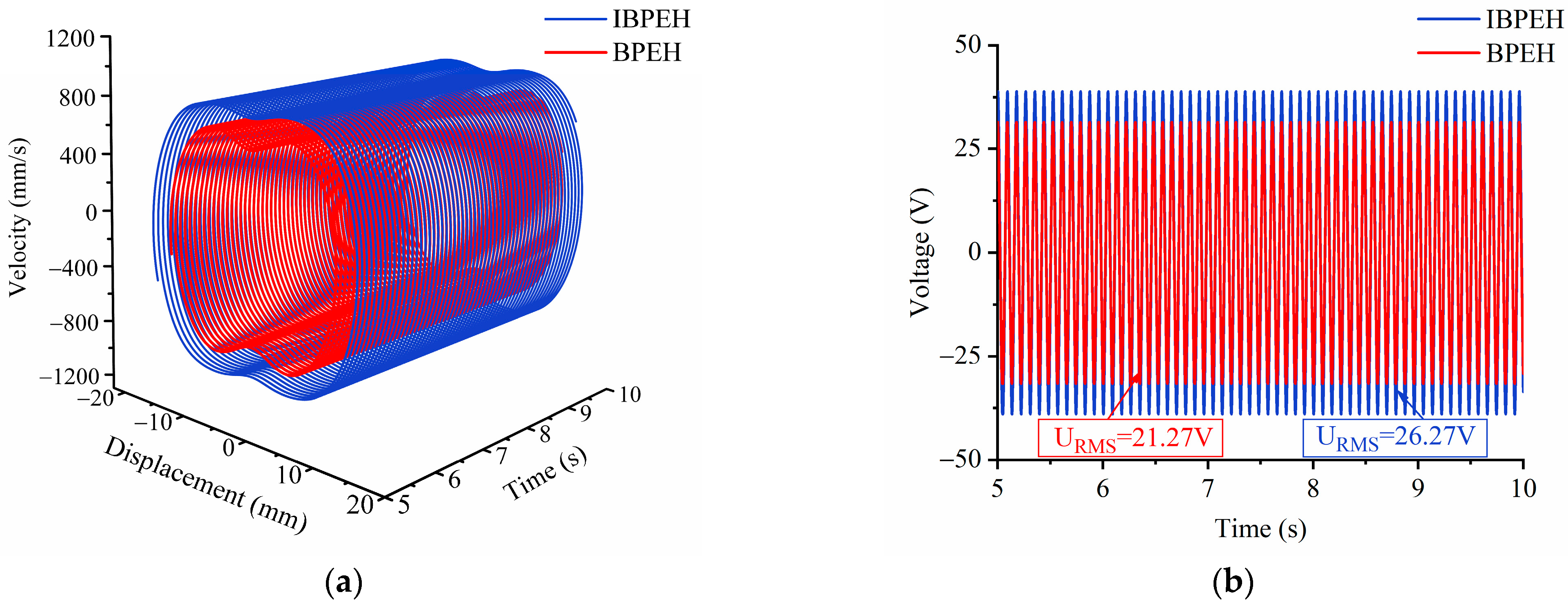
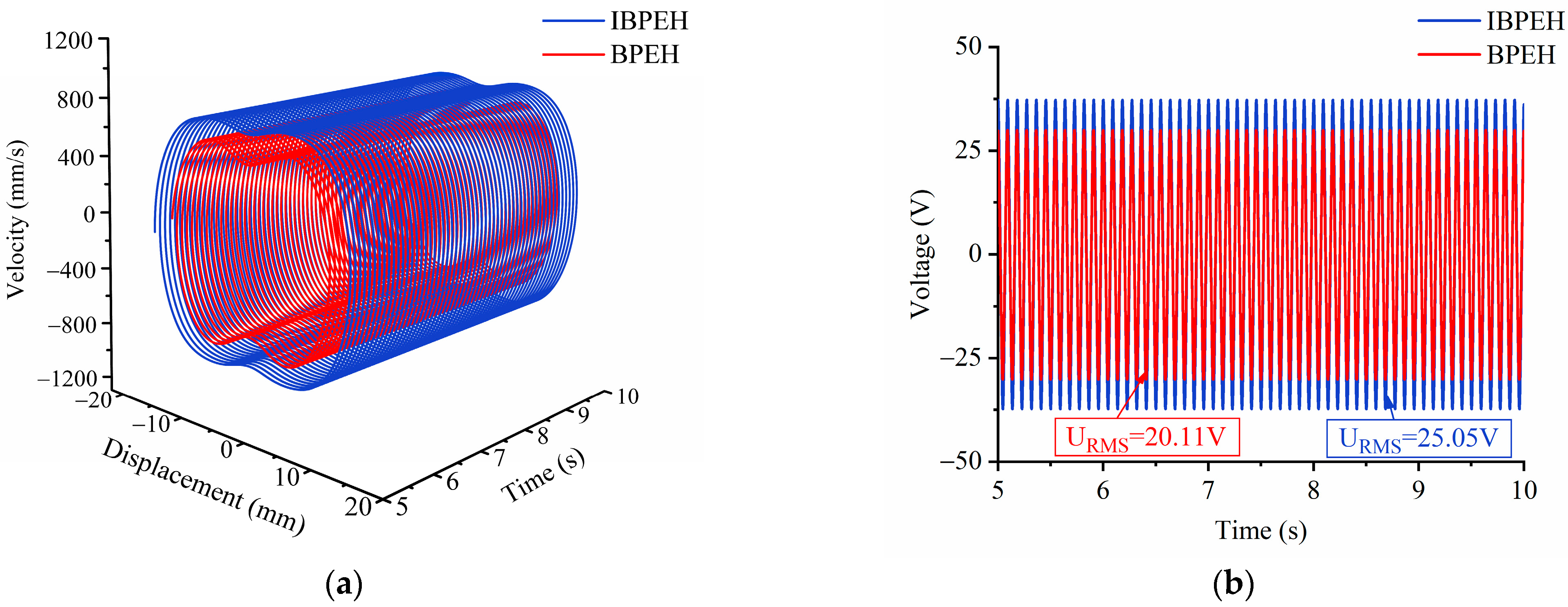
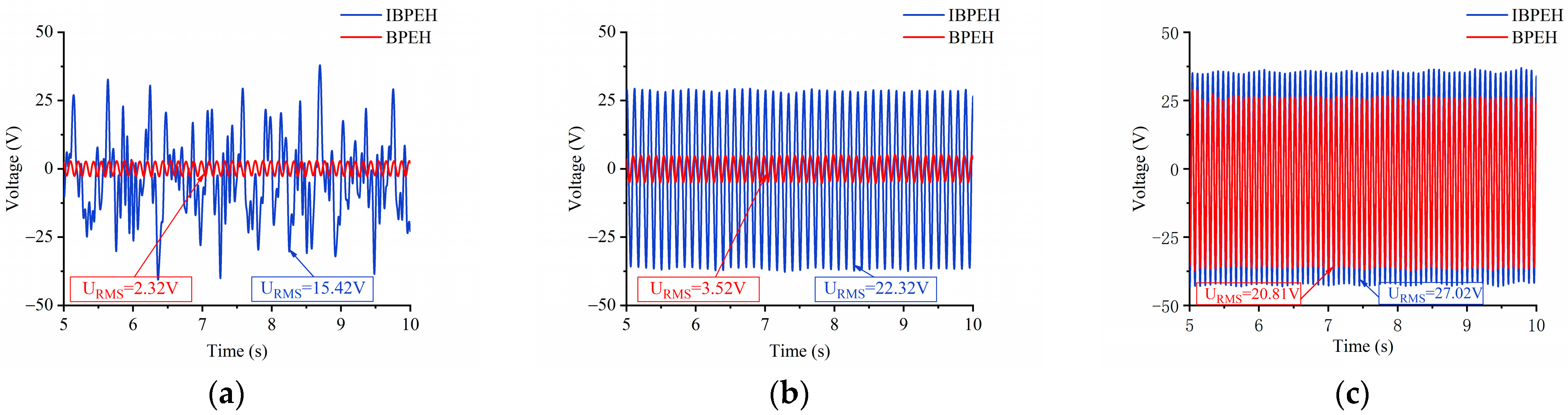
- IBPEH can remove the restriction of BPEH potential well depth and improve the power output. In the whole range of excitation frequency and amplitude, the voltage generated by IBPEH is always higher than that of BPEH under the same excitation conditions. This further proves that the change in nonlinearity can affect the collection efficiency of piezoelectric energy harvesters.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Muduli, L.; Mishra, D.P.; Jana, P.K. Application of wireless sensor network for environmental monitoring in underground coal mines. J. Netw. Comput. App. 2018, 106, 48–67. [Google Scholar] [CrossRef]
- Du, Y.; Zhou, S.; Jing, X. Damage detection techniques for wind turbine blades: A review. Mech. Syst. Signal Process. 2020, 141, 106445. [Google Scholar] [CrossRef]
- Tran, N.; Ghayesh, M.H.; Arjomandi, M. Ambient vibration energy harvesters: A review on nonlinear techniques for performance enhancement. Int. J. Eng. Sci. 2018, 127, 162–185. [Google Scholar] [CrossRef]
- Daqaq, M.F.; Masana, R.; Erturk, A. On the role of nonlinearities in vibratory energy harvesting: A critical review and discussion. Appl. Mech. Rev. 2014, 66, 4. [Google Scholar] [CrossRef]
- Liu, W.; Badel, A.; Formosa, F. A comprehensive analysis and modeling of the self-powered synchronous switching harvesting circuit with electronic breakers. IEEE Trans. Ind. Electron. 2017, 65, 3899–3909. [Google Scholar] [CrossRef]
- Mitcheson, P.D.; Miao, P.; Stark, B.H. MEMS electrostatic micropower generator for low frequency operation. Sens. Actuators A Phys. 2004, 115, 523–529. [Google Scholar] [CrossRef]
- Arnold, D.P. Review of microscale magnetic power generation. IEEE Trans. Magn. 2007, 43, 3940–3951. [Google Scholar] [CrossRef]
- Parinov, I.A.; Cherpakov, A.V. Overview: State-of-the-Art in the energy harvesting based on piezoelectric devices for last decade. Symmetry 2022, 14, 765. [Google Scholar] [CrossRef]
- Zhao, X.; Shang, Z.; Luo, G. A vibration energy harvester using AlN piezoelectric cantilever array. Microelectron. Eng. 2015, 142, 47–51. [Google Scholar] [CrossRef]
- Shahruz, S.M. Design of mechanical band-pass filters for energy scavenging. J. Sound Vib. 2006, 292, 987–998. [Google Scholar] [CrossRef]
- Liu, D.; Al-Haik, M.; Zakaria, M. Piezoelectric energy harvesting using L-shaped structures. J. Intel. Mat. Syst. Str. 2018, 29, 1206–1215. [Google Scholar] [CrossRef]
- Syta, A.; Bowen, C.R.; Kim, H.A. Experimental analysis of the dynamical response of energy harvesting devices based on bistable laminated plates. Meacanica 2015, 50, 1961–1970. [Google Scholar] [CrossRef] [PubMed]
- Masana, R.; Daqaq, M.F. Electromechanical modeling and nonlinear analysis of axially loaded energy harvesters. J. Vib. Acoust. 2011, 133, 011007. [Google Scholar] [CrossRef]
- Mak, K.H.; McWilliam, S.; Popov, A.A. Performance of a cantilever piezoelectric energy harvester impacting a bump stop. J. Sound Vib. 2011, 330, 6184–6202. [Google Scholar] [CrossRef]
- Tang, L.; Wang, J. Modeling and analysis of cantilever piezoelectric energy harvester with a new-type dynamic magnifier. ACTA Mech. 2018, 229, 4643–4662. [Google Scholar] [CrossRef]
- Ferrari, M.; Bau, M.; Guizzetti, M. A single-magnet nonlinear piezoelectric converter for enhanced energy harvesting from random vibrations. Sens. Actuators A Phys. 2011, 172, 287–292. [Google Scholar] [CrossRef]
- Singh, K.A.; Kumar, R.; Weber, R.J. A broadband bistable piezoelectric energy harvester with nonlinear high-power extraction. IEEE Trans. Power Electr. 2015, 30, 6763–6774. [Google Scholar] [CrossRef]
- Sun, S.; Cao, S.Q. Analysis of chaos behaviors of a bistable piezoelectric cantilever power generation system by the second-order Melnikov function. Acta Mech. Sinica-PRC 2017, 33, 200–207. [Google Scholar]
- Cai, W.; Harne, R.L. Characterization of challenges in asymmetric nonlinear vibration energy harvesters subjected to realistic excitation. J. Sound Vib. 2020, 482, 115460. [Google Scholar] [CrossRef]
- Stanton, S.C.; McGehee, C.; Mann, B.P. Nonlinear dynamics for broadband energy harvesting: Investigation of a bistable piezoelectric inertial generator. Physica D 2010, 239, 640–653. [Google Scholar] [CrossRef]
- Wang, H.; Tang, L. Modeling and experiment of bistable two-degree-of-freedom energy harvester with magnetic coupling. Mech. Syst. Signal Process. 2017, 86, 29–39. [Google Scholar] [CrossRef]
- Abdelkefi, A.; Barsallo, N. Nonlinear analysis and power improvement of broadband low-frequency piezomagnetoelastic energy harvesters. Nonlinear Dynam. 2016, 83, 41–56. [Google Scholar] [CrossRef]
- Zhou, Z.; Qin, W.; Du, W. Improving energy harvesting from random excitation by nonlinear flexible bi-stable energy harvester with a variable potential energy function. Mech. Syst. Signal Process. 2019, 115, 162–172. [Google Scholar] [CrossRef]
- Rui, X.; Li, Y.; Liu, Y. Experimental study and parameter optimization of a magnetic coupled piezoelectric energy harvester. Appl. Sci. 2018, 8, 2609. [Google Scholar] [CrossRef]
- Fan, K.; Tan, Q.; Liu, H. Improved energy harvesting from low-frequency small vibrations through a monostable piezoelectric energy harvester. Mech. Syst. Signal Process. 2019, 117, 594–608. [Google Scholar] [CrossRef]
- Lan, C.; Qin, W. Enhancing ability of harvesting energy from random vibration by decreasing the potential barrier of bistable harvester. Mech. Syst. Signal Process. 2017, 85, 71–81. [Google Scholar] [CrossRef]
- Zhang, X.; Zhu, F.; Chen, L. Dynamic characteristics and experimental research of linear-arch Bi-stable piezoelectric energy harvester. Micromachines 2022, 13, 814. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Substrate layer | |||
| Density | kg/m3 | ||
| Arc-shaped radius | m | ||
| Length | m | ||
| Height | m | ||
| Width | m | ||
| PVDF | |||
| Density | kg/m3 | ||
| Length | m | ||
| Height | m | ||
| Width | m | ||
| Magnet | |||
| Mass | kg | ||
| Length | m | ||
| Height | m | ||
| Width | m | ||
| Magnetization strength | A/m | ||
| Vacuum permeability | H/m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Tian, H.; Pan, J.; Chen, X.; Huang, M.; Xu, H.; Zhu, F.; Guo, Y. Vibration Characteristics and Experimental Research of an Improved Bistable Piezoelectric Energy Harvester. Appl. Sci. 2023, 13, 258. https://doi.org/10.3390/app13010258
Zhang X, Tian H, Pan J, Chen X, Huang M, Xu H, Zhu F, Guo Y. Vibration Characteristics and Experimental Research of an Improved Bistable Piezoelectric Energy Harvester. Applied Sciences. 2023; 13(1):258. https://doi.org/10.3390/app13010258
Chicago/Turabian StyleZhang, Xuhui, Hao Tian, Jianan Pan, Xiaoyu Chen, Mengyao Huang, Hengtao Xu, Fulin Zhu, and Yan Guo. 2023. "Vibration Characteristics and Experimental Research of an Improved Bistable Piezoelectric Energy Harvester" Applied Sciences 13, no. 1: 258. https://doi.org/10.3390/app13010258
APA StyleZhang, X., Tian, H., Pan, J., Chen, X., Huang, M., Xu, H., Zhu, F., & Guo, Y. (2023). Vibration Characteristics and Experimental Research of an Improved Bistable Piezoelectric Energy Harvester. Applied Sciences, 13(1), 258. https://doi.org/10.3390/app13010258