
Hydro-Mechanically Coupled Numerical Modelling on Vibratory Open-Ended Pile Driving in Saturated Sand


Abstract
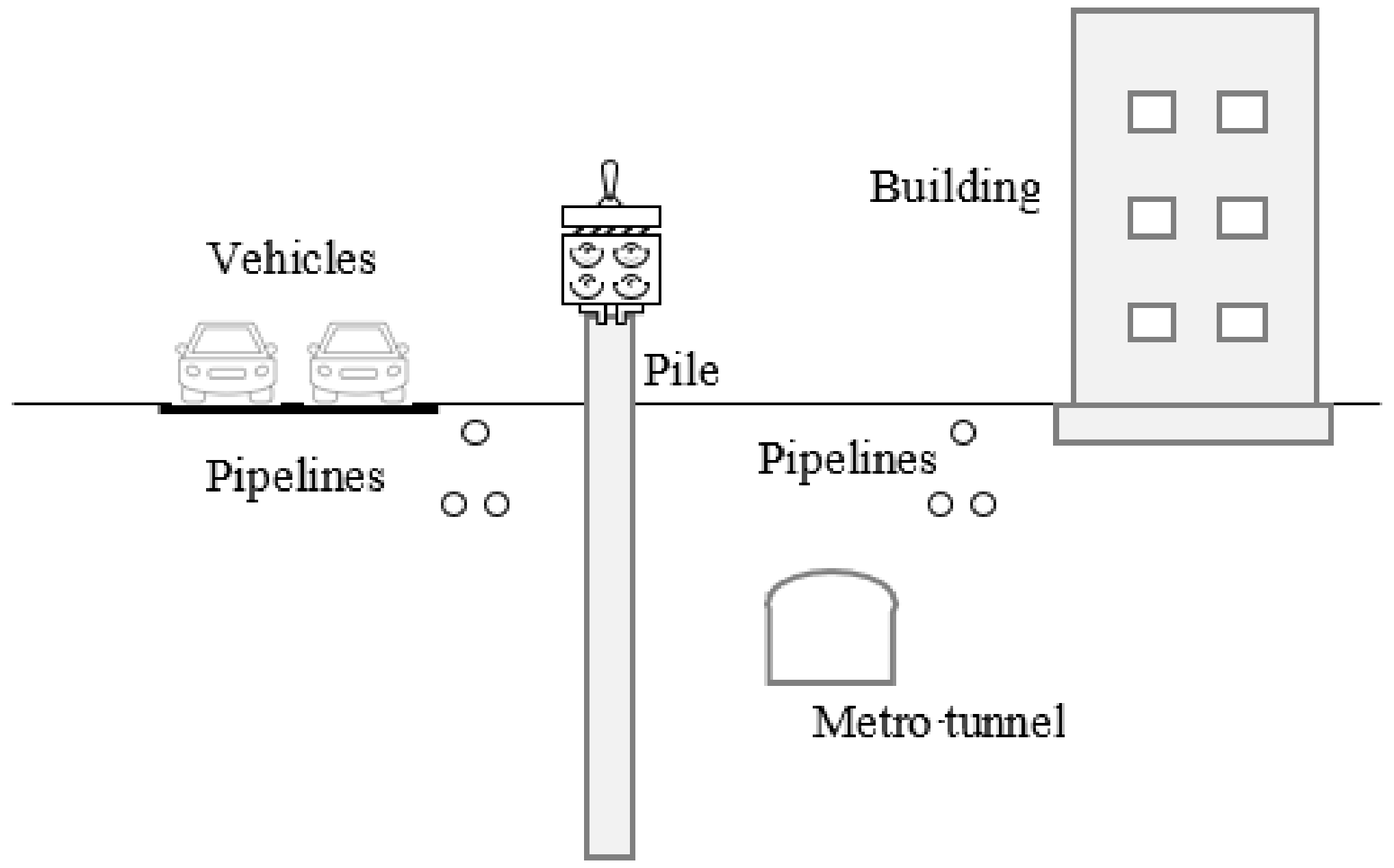
:1. Introduction
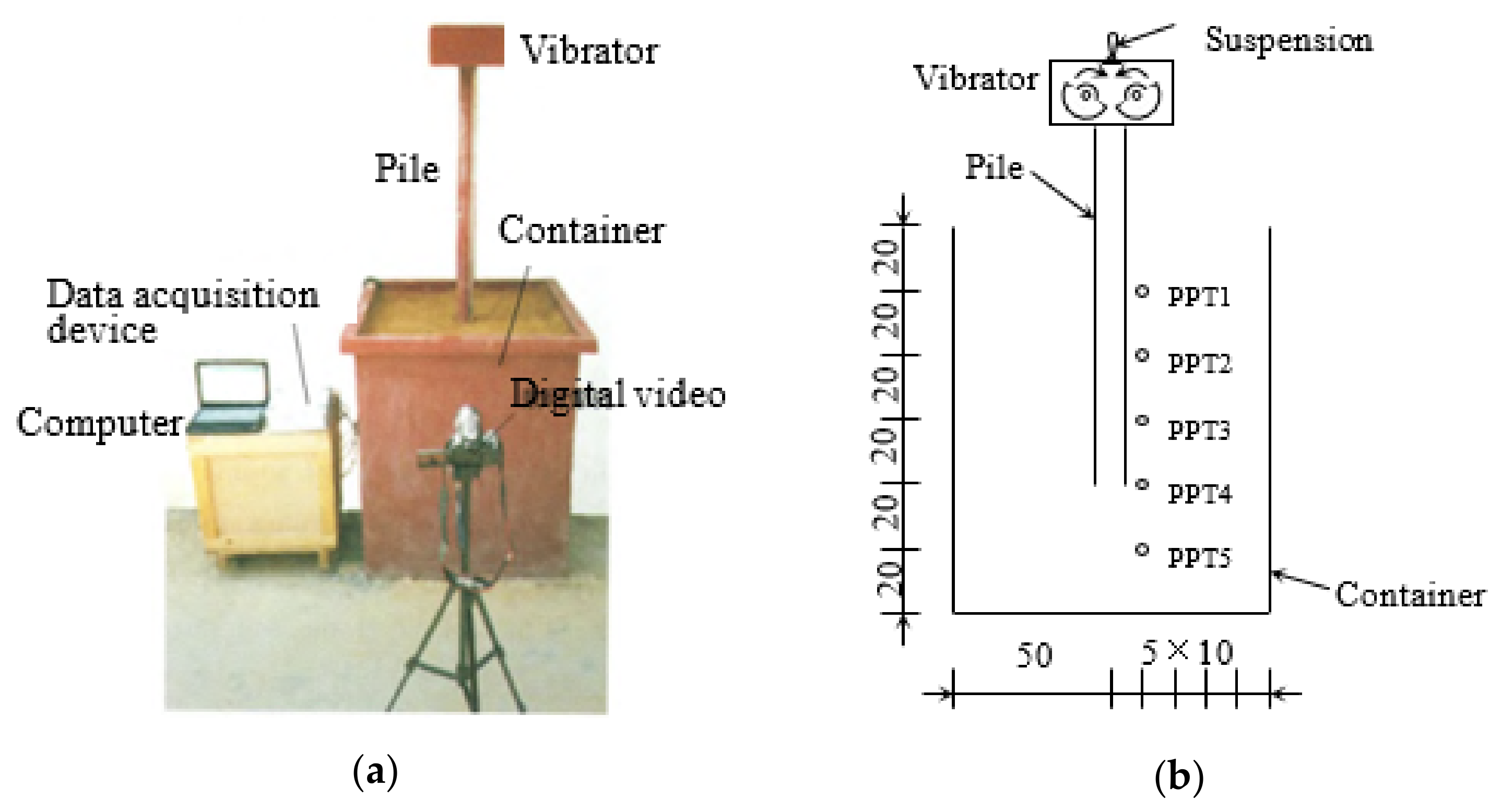
2. Brief Description of the Vibratory Pile Driving Experiment
3. Numerical Model
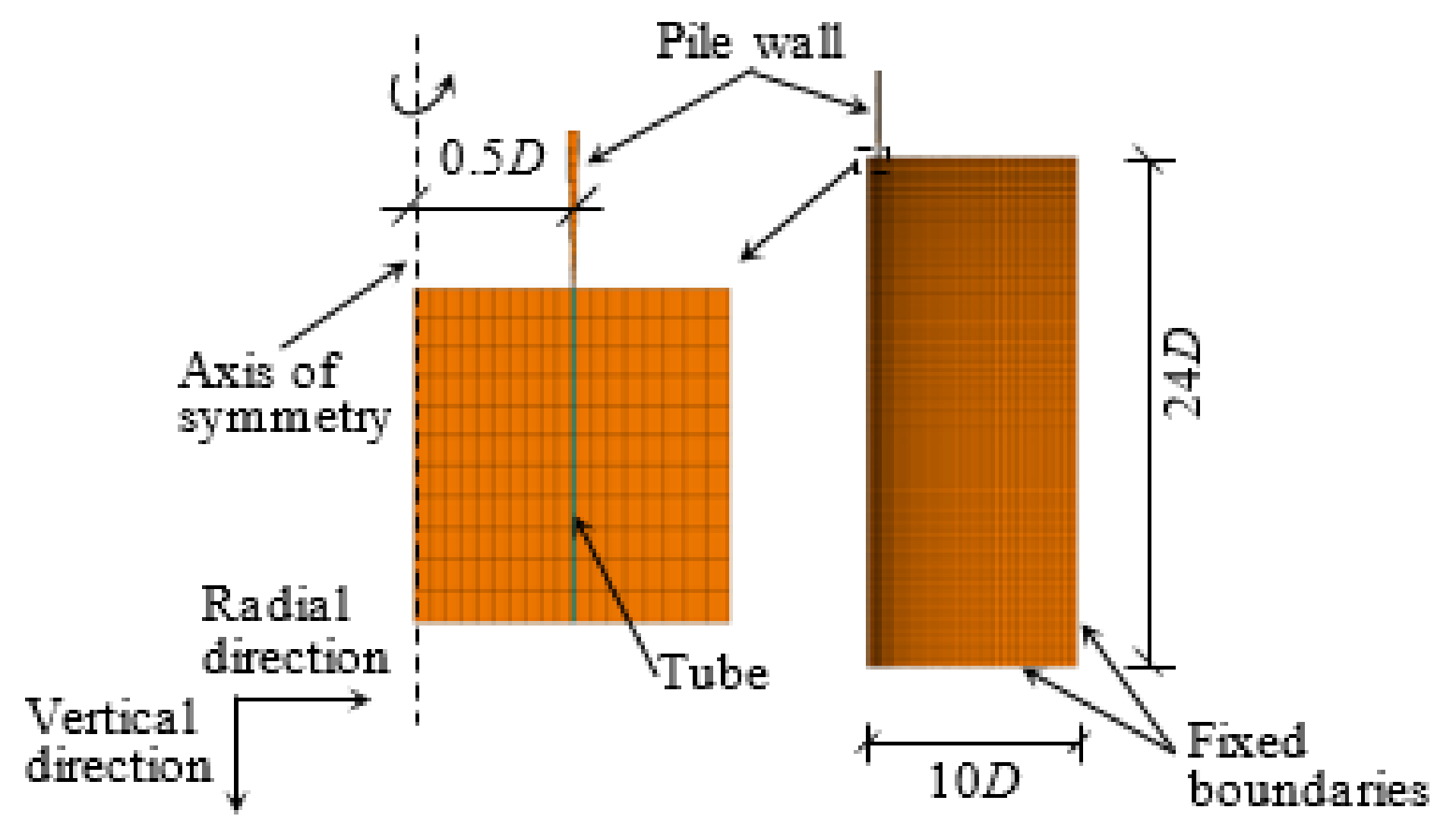
3.1. Geometry Model
3.2. Material Parameters
3.3. Contact Parameters
3.4. Load Parameters
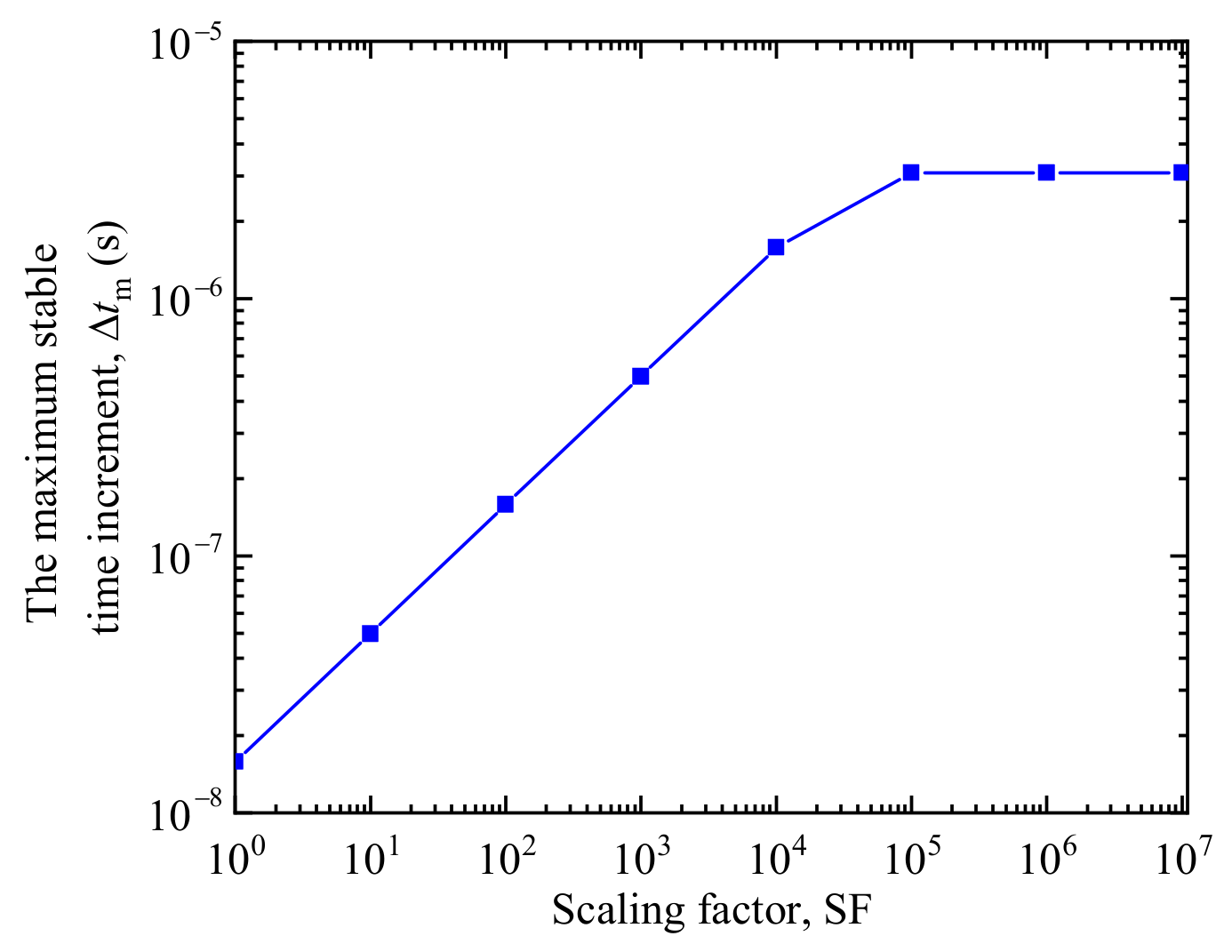
4. Influence of the Scaling Factor
5. Results of the Proposed Model
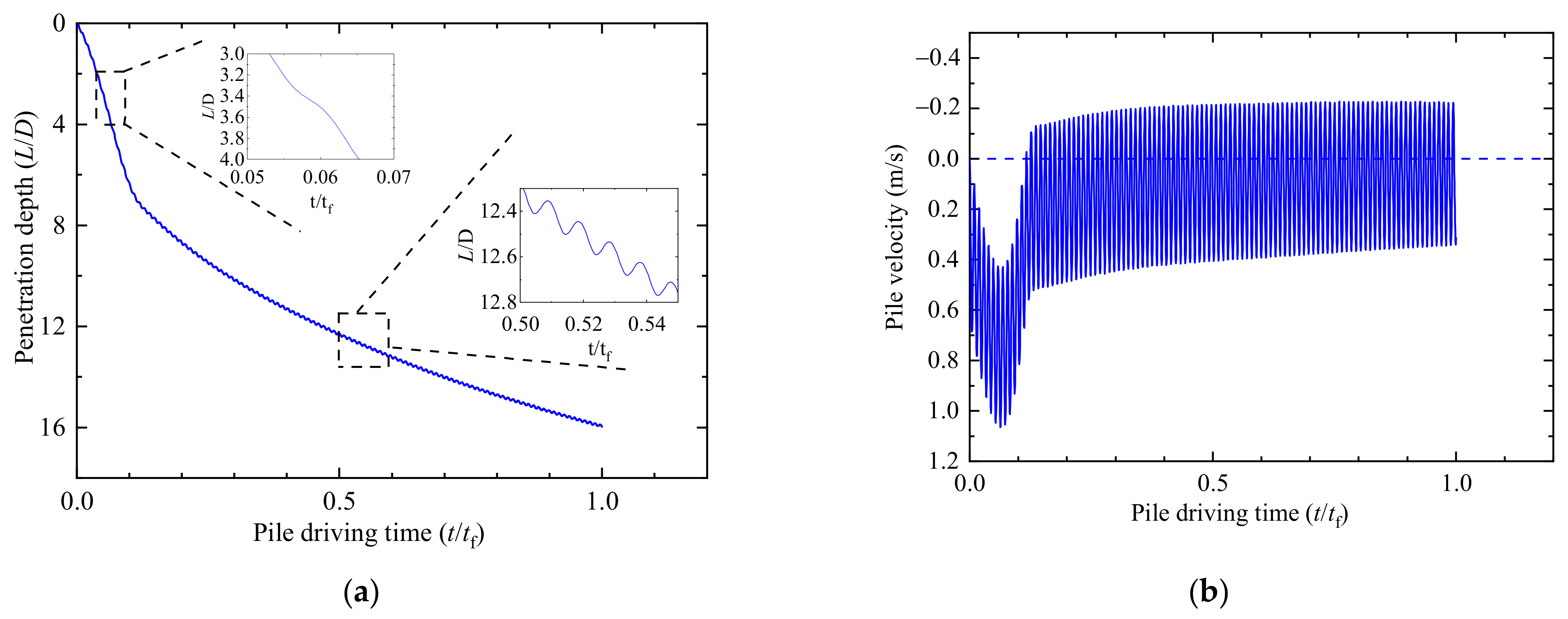
5.1. Pile Displacement and Velocity
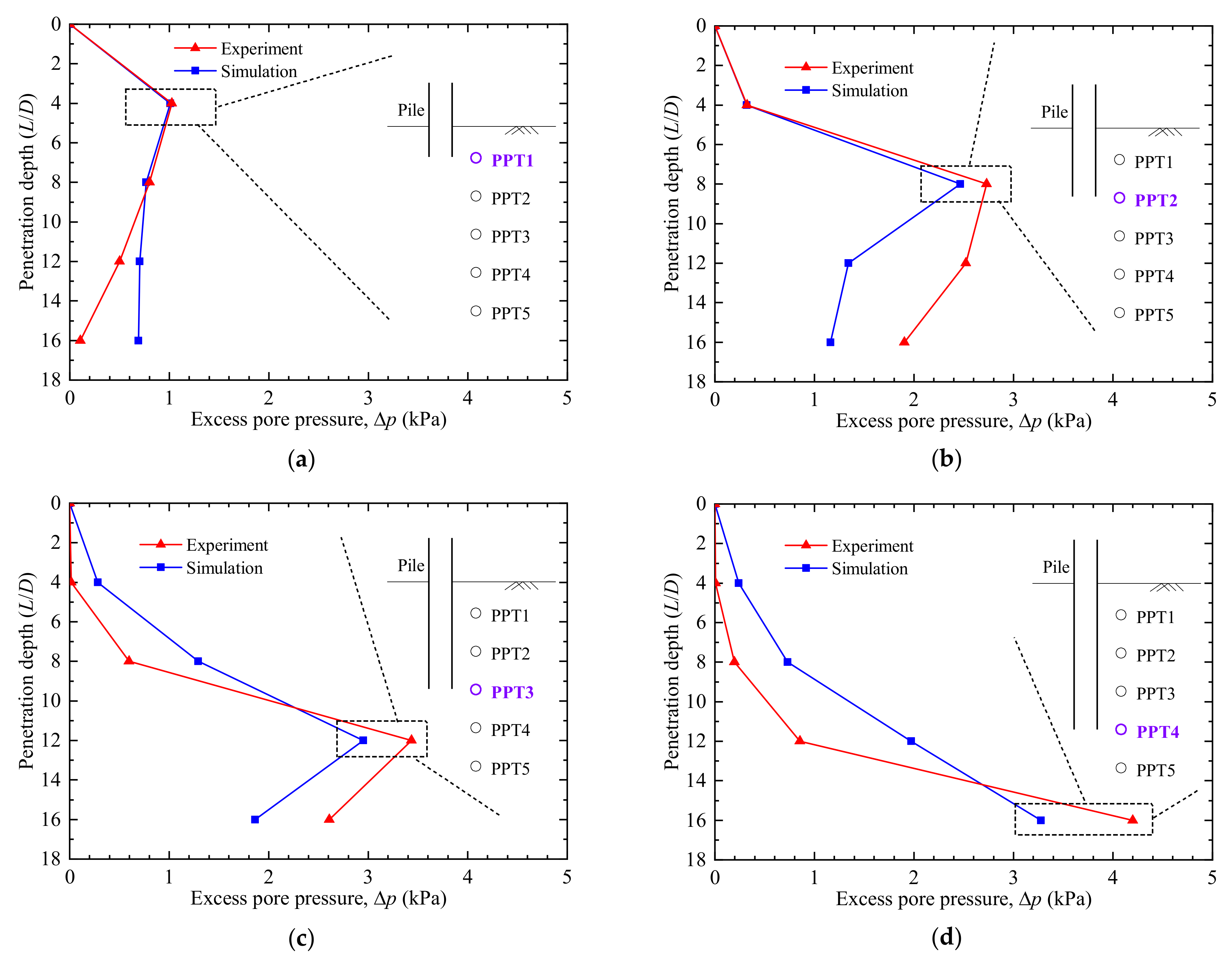
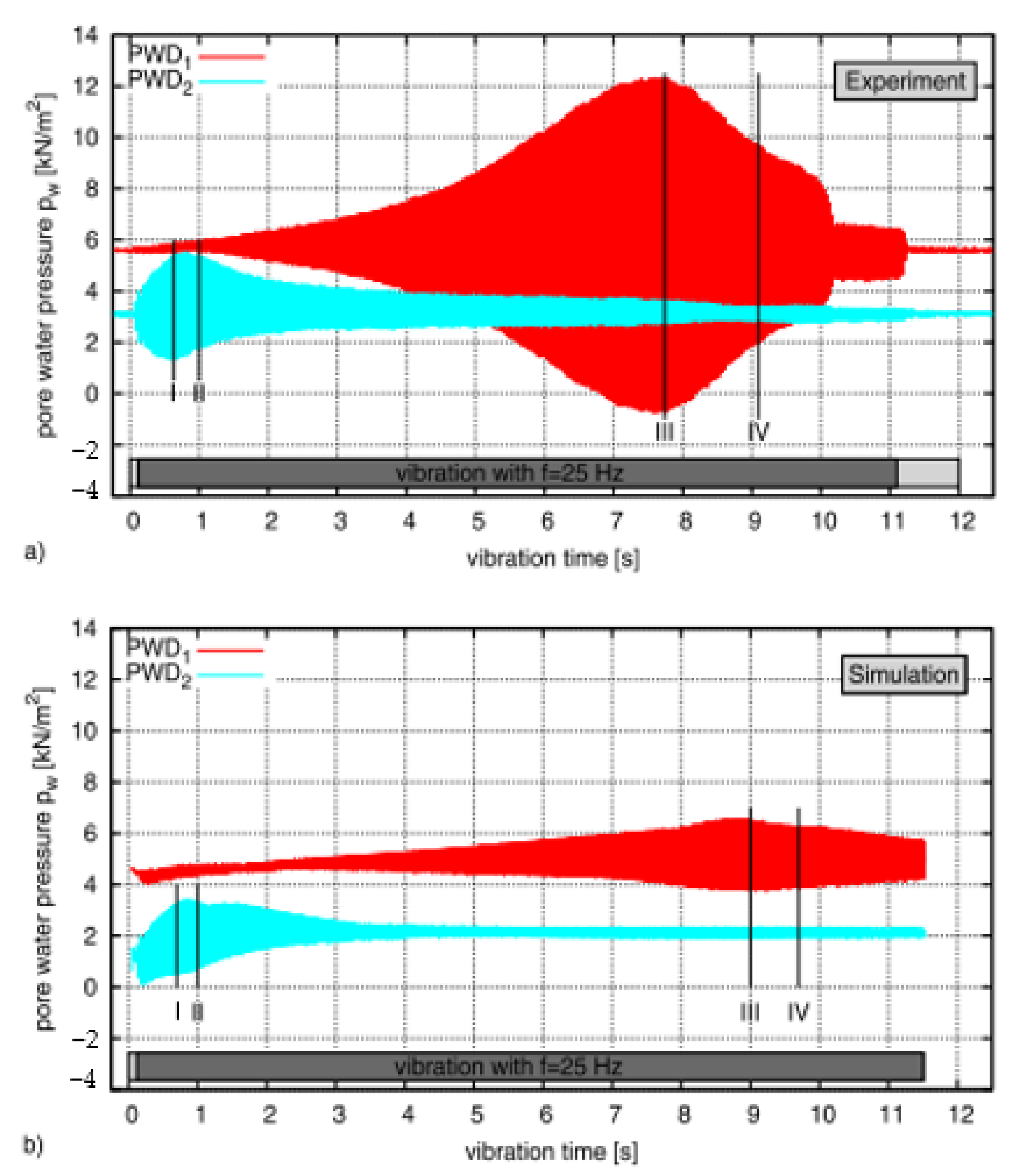
5.2. Comparison between Numerical and Experimental Results
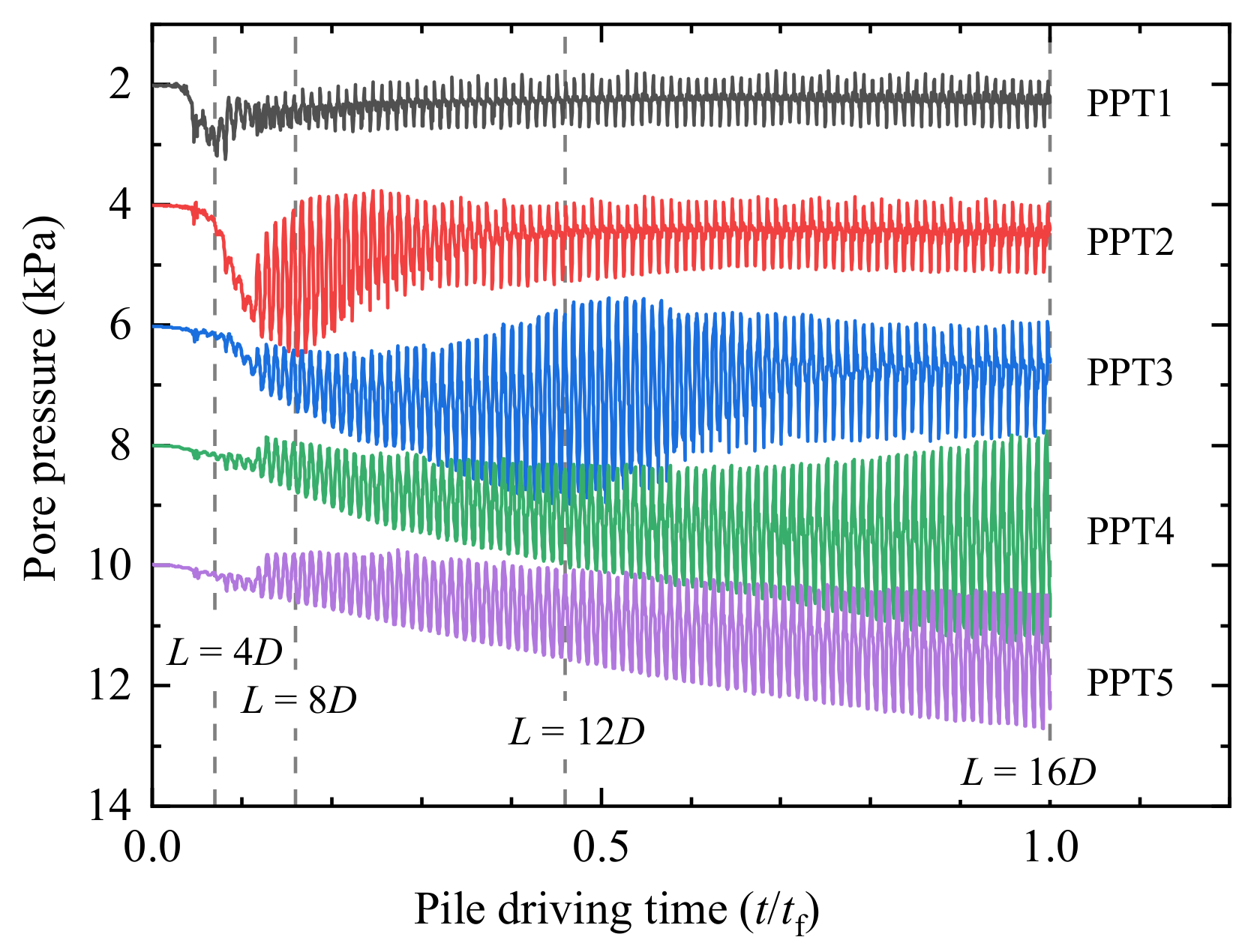
5.3. Evolution of Pore Pressure
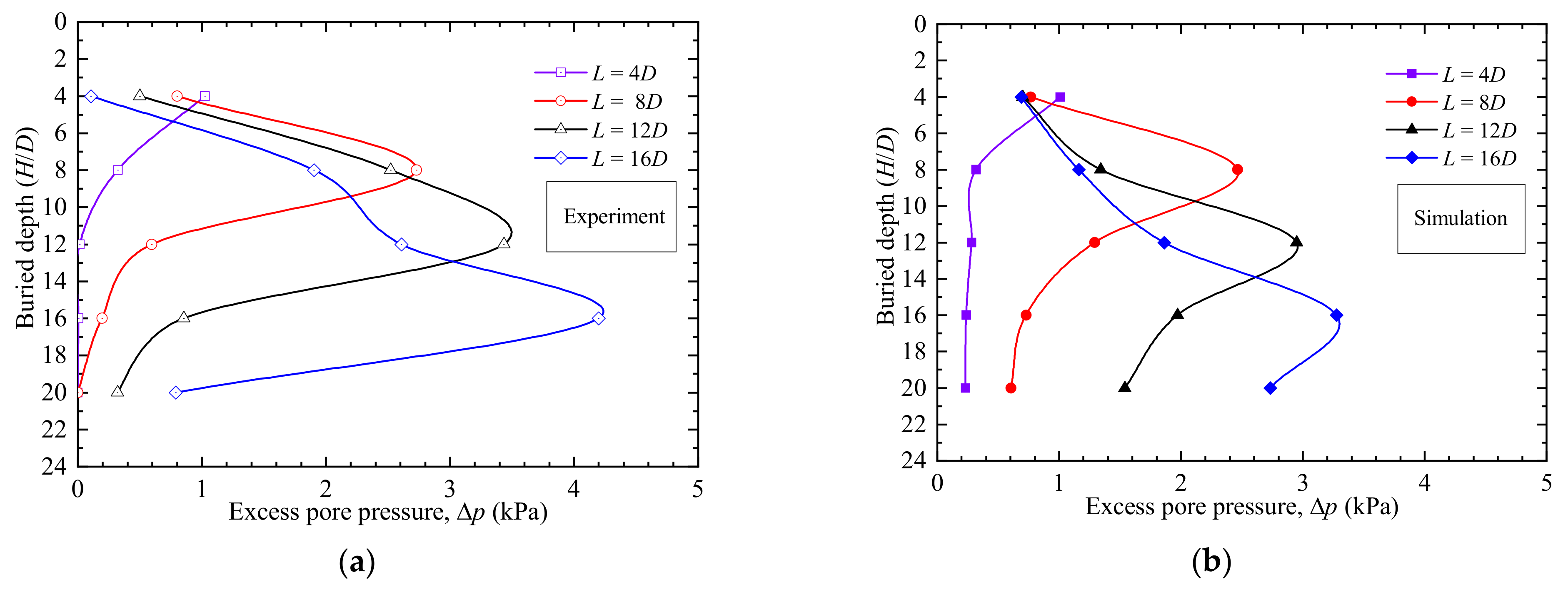
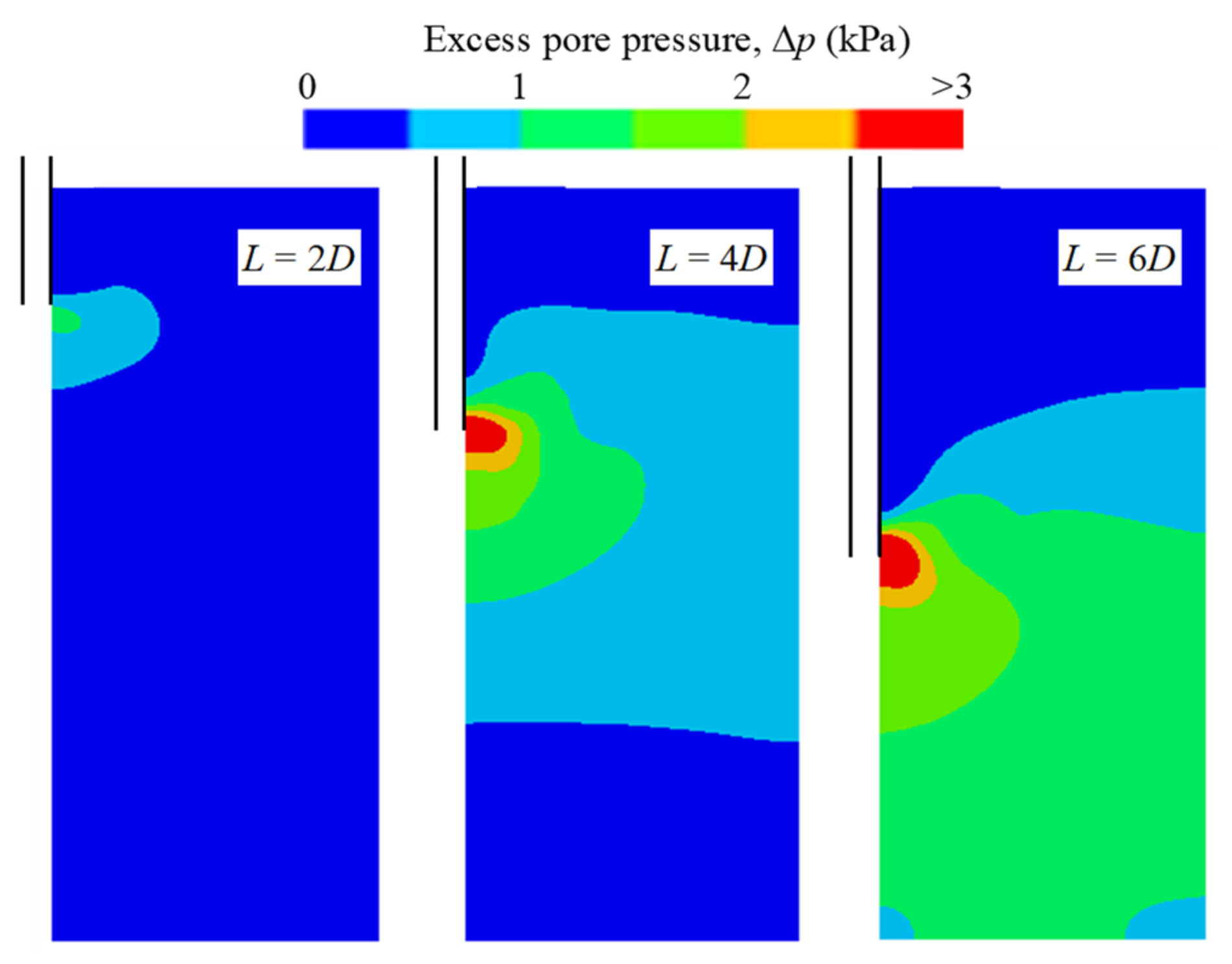
5.4. Field Distribution of Excess Pore Pressure
6. Discussion
7. Conclusions
- The scaling factor has a significant impact on the computation time but has little effect on the distribution of excess pore water pressure . The computation efficiency of the proposed model is increased around 67 times by the density scaling method without affecting the numerical stability.
- The results from the proposed model are reliable because (a) the trends of measured pore pressures can be reproduced, and (b) the measured maximum at different depths can be predicted with a percent error of 2–22%.
- For a certain penetration depth, the increases and then decreases in the vertical direction as the observation points are 2D away from the pile axis. The maximum occurs near the pile toe. For a specified observation point, its reaches the maximum when the pile toe passes the point and gradually decreases afterwards. The influence scope of enlarge along with the vibratory penetration.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, C.L. Experimental study on vibration effect of steel pipe piles resonance-free construction on adjacent metro. Build. Struct. 2018, 40, 1655–1657. (In Chinese) [Google Scholar] [CrossRef]
- Li, C.; Zhang, M.X.; Zhou, R.F.; Wang, Z.Q. In-situ test on resonance-free pile. J. Yangtze River Sci. Res. Inst. 2020, 37, 122–127. (In Chinese) [Google Scholar] [CrossRef]
- Arjen. Indoor Piling Job at NECC. Available online: https://www.icevibro.com/article/406/8.html (accessed on 17 July 2019).
- Wang, W.D.; Wei, J.B.; Wu, J.B.; Zhou, R.F. Field test and analysis on effects of pile driving with high-frequency and resonance-free technology on surrounding soil. J. Build. Struct. 2021, 42, 131–138. (In Chinese) [Google Scholar] [CrossRef]
- International Construction Equipment (ICE). Resonance Free Vibratory Hammers. Available online: https://www.diesekogroup.com/landing-page/resonance-free/ (accessed on 4 October 2021).
- Wei, J.B.; Wang, W.D.; Wu, J.B. Numerical investigation of inside peak particle velocities for predicting the vibration influence radius of vibratory pile driving. Soil Dyn. Earthq. Eng. 2022, 153, 107103. [Google Scholar] [CrossRef]
- Henke, S.; Grabe, J. Numerical investigation of soil plugging inside open-ended piles with respect to the installation method. Acta Geotech. 2008, 3, 215–223. [Google Scholar] [CrossRef]
- Xiao, Y.J.; Chen, F.Q.; Dong, Y.Z. Model test and numerical simulation of penetration process of sleeve for cast-in-place piles driven by vibratory hammers. J. Southwest Jiaotong Univ. 2017, 52, 705–714. (In Chinese) [Google Scholar] [CrossRef]
- Wang, S.G.; Zhu, S.Y. Global Vibration Intensity Assessment Based on Vibration Source Localization on Construction Sites: Application to Vibratory Sheet Piling. Appl. Sci. 2022, 12, 1946. [Google Scholar] [CrossRef]
- Ekanayake, S.D.; Liyanapathirana, D.S.; Leo, C.J. Influence zone around a closed-ended pile during vibratory driving. Soil Dyn. Earthq. Eng. 2013, 53, 26–36. [Google Scholar] [CrossRef]
- Wei, J.B.; Wang, W.D.; Wu, J.B. Numerical simulation with FLAC3D on ground surface vibration during pile driving using resonance-free technology. J. Jilin Univ. (Earth Sci. Ed.). 2021, 51, 1514–1522. (In Chinese) [Google Scholar] [CrossRef]
- Osinov, V.A.; Chrisopoulos, S.; Triantafyllidis, T. Numerical study of the deformation of saturated soil in the vicinity of a vibrating pile. Acta Geotech. 2013, 8, 439–446. [Google Scholar] [CrossRef]
- Osinov, V.A. Application of a high-cycle accumulation model to the analysis of soil liquefaction around a vibrating pile toe. Acta Geotech. 2013, 8, 675–684. [Google Scholar] [CrossRef]
- Chrisopoulos, S.; Osinov, V.A.; Triantafyllidis, T. Dynamic Problem for the Deformation of Saturated Soil in the Vicinity of a Vibrating Pile Toe; Springer International Publishing: Cham, Switzerland, 2016; pp. 53–67. [Google Scholar]
- Chrisopoulos, S.; Vogelsang, J.; Triantafyllidis, T. FE Simulation of Model Tests on Vibratory Pile driving in Saturated Sand; Springer International Publishing: Cham, Switzerland, 2017; pp. 124–149. [Google Scholar]
- Chrisopoulos, S.; Vogelsang, J. A finite element benchmark study based on experimental modeling of vibratory pile driving in saturated sand. Soil Dyn. Earthq. Eng. 2019, 122, 248–260. [Google Scholar] [CrossRef]
- Staubach, P.; Machaček, J. Influence of relative acceleration in saturated sand: Analytical approach and simulation of vibratory pile driving tests. Comput. Geotech. 2019, 112, 173–184. [Google Scholar] [CrossRef]
- Machaček, J.; Staubach, P.; Tafili, M.; Zachert, H.; Wichtmann, T. Investigation of three sophisticated constitutive soil models: From numerical formulations to element tests and the analysis of vibratory pile driving tests. Comput. Geotech. 2021, 138, 104276. [Google Scholar] [CrossRef]
- Staubach, P.; Machaček, J.; Skowronek, J.; Wichtmann, T. Vibratory pile driving in water-saturated sand: Back-analysis of model tests using a hydro-mechanically coupled CEL method. Soils Found. 2021, 61, 144–159. [Google Scholar] [CrossRef]
- NUMGEO. Available online: https://www.numgeo.de/.
- Itasca Consulting Group, Inc. (ISG). FLAC3D-Fast Lagrangian Analysis of Continua in Three-Dimensions, Version 6.0, User’s Guide Manual; Itasca Consulting Group, Inc.: Minneaplis, MN, USA, 2019. [Google Scholar]
- Moriyasu, S.; Kobayashi, S.; Matsumoto, T. Experimental study on friction fatigue of vibratory driven piles by in situ model tests. Soils Found. 2018, 58, 853–865. [Google Scholar] [CrossRef]
- O’Neill, M.W.; Vipulanandan, C.; Wong, D. Laboratory modeling of vibro-driven piles. J. Geotech. Eng. 1990, 116, 1190–1209. [Google Scholar] [CrossRef]
- Vogelsang, J.; Huber, G.; Triantafyllidis, T. Experimental Investigation of Vibratory Pile Driving in Saturated Sand; Springer International Publishing: Cham, Switzerland, 2017; pp. 101–123. [Google Scholar]
- Dassault Systèmes Simulia (DSS). Abaqus 2016 Analysis User’s Manual; Simulia: Providence, RI, USA, 2016. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Constitutive Model | Density [kg/m3] | Elastic Modulus E [GPa] | Poisson’s Ratio | Internal Friction Angle [°] | N1 * |
|---|---|---|---|---|---|---|
| Sand | Finn | 1924 | 0.02 | 0.28 | 28 | 6 |
| Pile | Elastic | 7850 | 206 | 0.26 | ||
| Tube | Elastic | 7850 | 206 | 0.26 |
| Type | Normal Stiffness kn [GPa·m] | Shear Stiffness ks [GPa·m] | Friction Angle [°] |
|---|---|---|---|
| Pile–soil | 0.2 | 0.2 | 10 |
| Tube–soil | 8 | 8 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wei, J.; Wang, W.; Wu, J. Hydro-Mechanically Coupled Numerical Modelling on Vibratory Open-Ended Pile Driving in Saturated Sand. Appl. Sci. 2022, 12, 4527. https://doi.org/10.3390/app12094527
Wei J, Wang W, Wu J. Hydro-Mechanically Coupled Numerical Modelling on Vibratory Open-Ended Pile Driving in Saturated Sand. Applied Sciences. 2022; 12(9):4527. https://doi.org/10.3390/app12094527
Chicago/Turabian StyleWei, Jiabin, Weidong Wang, and Jiangbin Wu. 2022. "Hydro-Mechanically Coupled Numerical Modelling on Vibratory Open-Ended Pile Driving in Saturated Sand" Applied Sciences 12, no. 9: 4527. https://doi.org/10.3390/app12094527
APA StyleWei, J., Wang, W., & Wu, J. (2022). Hydro-Mechanically Coupled Numerical Modelling on Vibratory Open-Ended Pile Driving in Saturated Sand. Applied Sciences, 12(9), 4527. https://doi.org/10.3390/app12094527