
Modeling of Geophysical Flows through GPUFLOW




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. The Physical-Mathematical Model
2.1.1. The Geometric Bias Resolution
2.1.2. The Thermal Model
2.1.3. The Input/Output Parameters
2.2. The GPU Implementation
3. Sensitivity Analysis
3.1. Impact of the Thermal Model
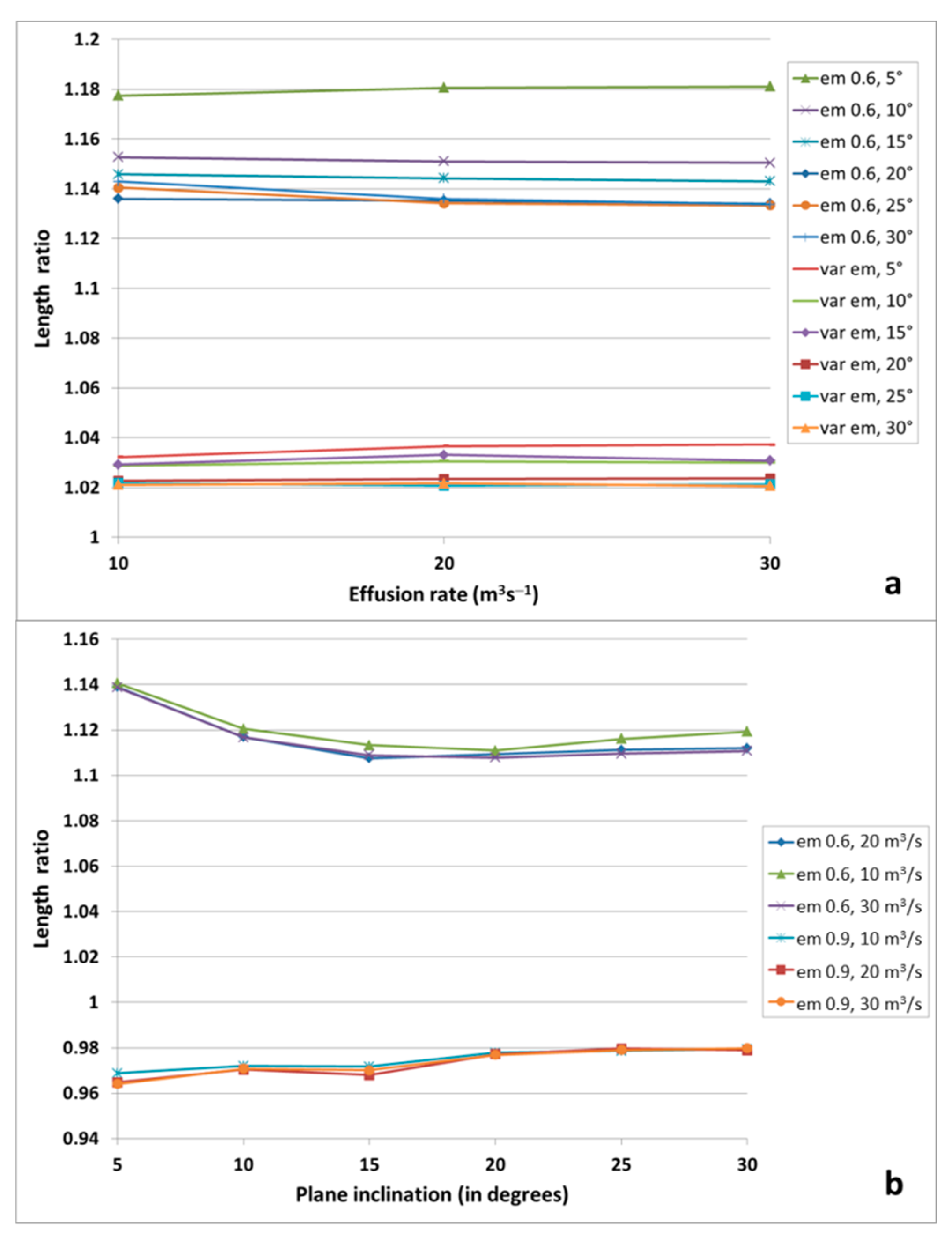
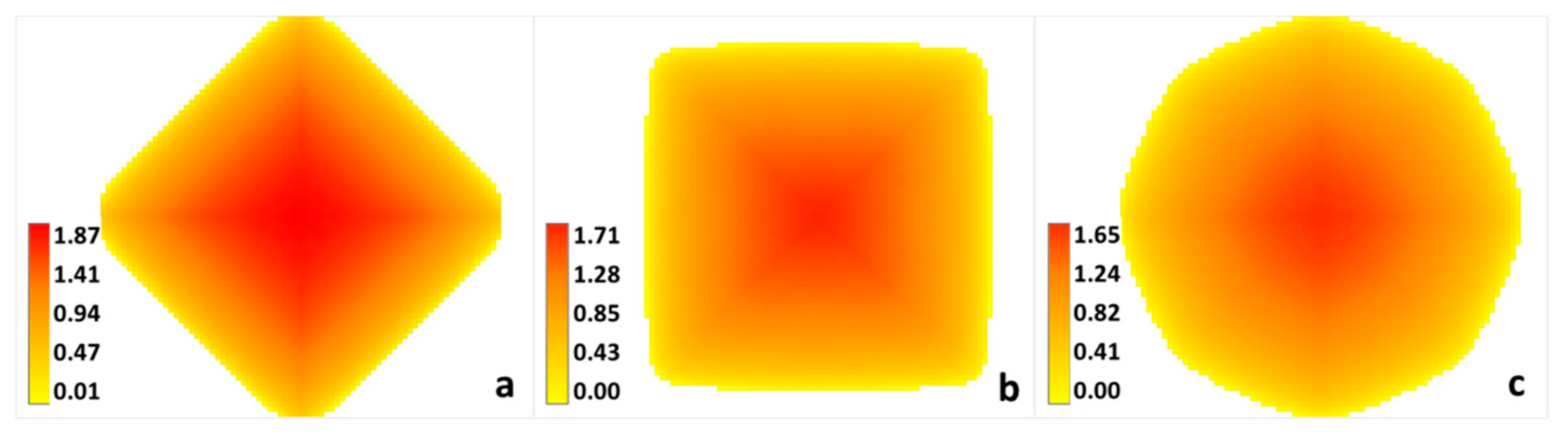
3.2. Impact of the Diagonal Correction
4. Results
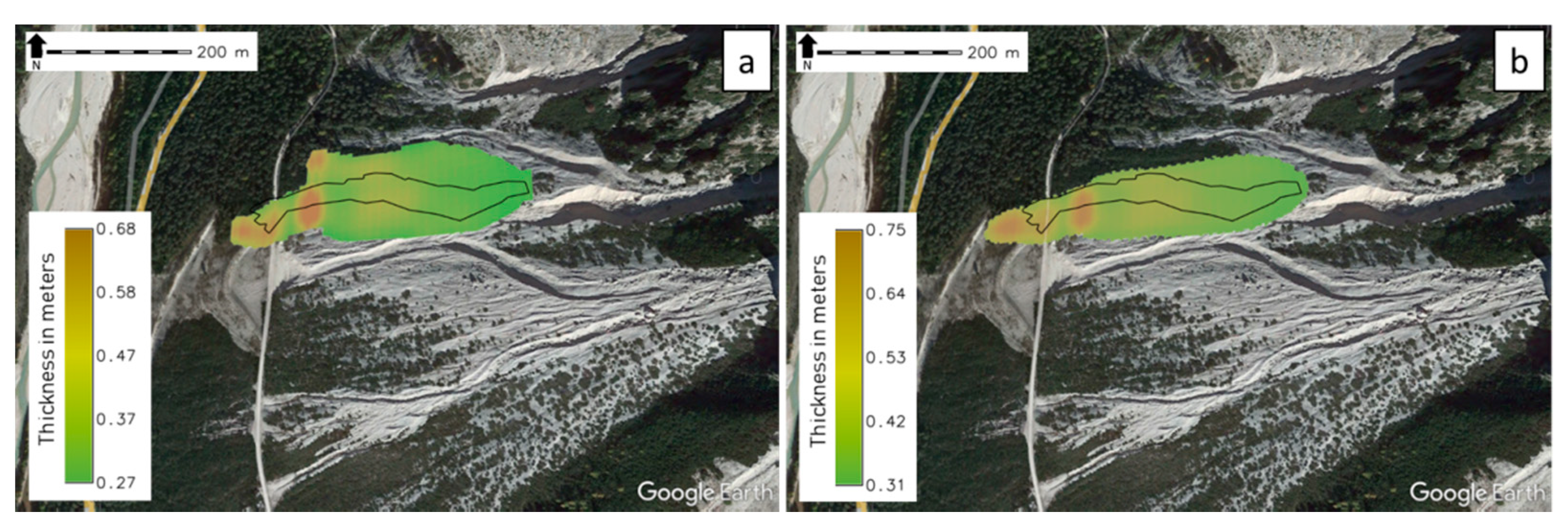
4.1. Simulation of the 2006 Debris Flow in the Territory of the Dolomites
4.2. Simulation of the 2018 Etna Eruption
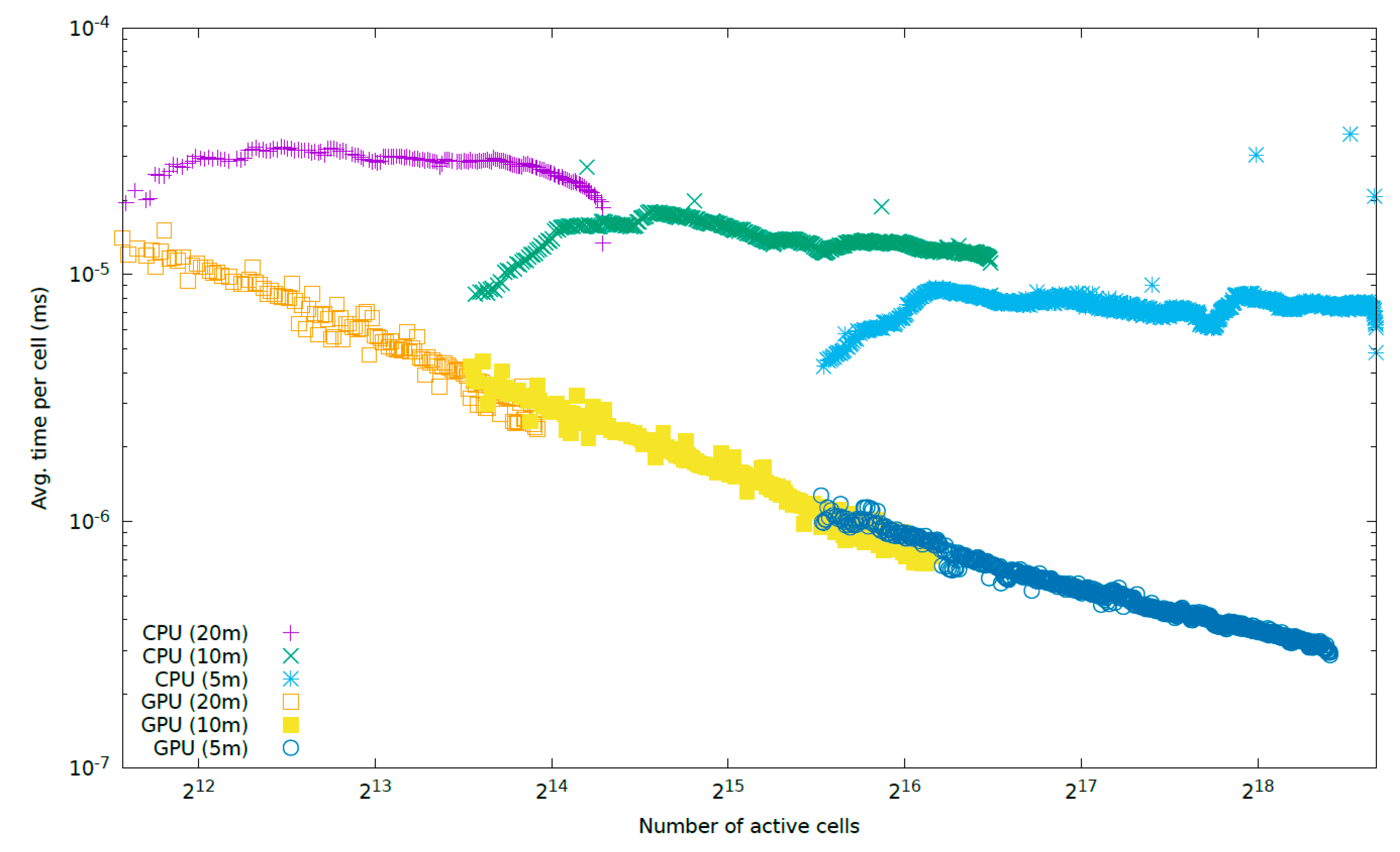
4.3. Computational Performance
5. Discussion
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
| ./gpuflow <dsm_file> <init_file> <vent_or_debris_file> <state> [-c] [-d output_folder] [--device X] [--debris] [--barrier barrier_file] [--diagonal-correction value] |
- dsm_file is the name of the DSM representing the topography of the area of interest around the lava or debris flow; it should be large enough to cover the entire final emplacement of the flow;
- init_file is the name of the initialization file, where most simulation settings (e.g., rheological properties of the lava) are set;
- vent_or_debris_file is the name of the file describing the source term; this is either the location and extension of the vent(s) and/or fracture(s) in an eruption, or a DSM representing the initial distribution of movable mass in the case of a debris flow;
- state is the name of the state file. This will be used to store the automaton state in a way that allows restarting the simulation from the given moment in time (adding the -l option to the command);
- -c specifies compression of the output files (in.zip format);
- -d introduces the output_folder, which is the name of the directory where all outputs pertaining the current the simulation will be stored;
- --device specifies the GPU where the simulation will be run;
- --debris specifies that a debris flow should be simulated (as opposed to a lava flow, which is the default);
- --barrier includes barriers to the simulation, with the geometries specified in the barrier_file;
- --diagonal-correction to set the diagonal correction factor to the specified value.
| location: x_coord y_coord |
| temperature: lava_temperature |
| tstart: time_start |
| tend: time_end |
| fluxrate: fluxrate_filename |
| location: x1_coord y1_coord x2_coord y2_coord x3_coord y3_coord …… |
| temperature: lava_temperature |
| tstart: time_start |
| tend: time_end |
| width: width_in_meters |
| fluxrate: fluxrate_filename |
| location: x1_coord y1_coord x2_coord y2_coord |
| height: height_in_meters |
| width: width_in_meters |
Appendix B
- Erupt runs in parallel over all cells that correspond to a vent, computing the new mass and heat to be added to the cell by linear interpolation of the time-averaged discharge rate (TADR) flux rate information;
- CalcFlux runs for every cell in the active bounding box, computing the mass and heat flux between cells as described by the physical model in 2.1 and the maximum allowed time-step for each cell;
- Reduce computes the minimum of the allowed time-steps to be used for the update;
- UpdateCells runs again on every cell in the active bounding box to update the new fluid and solid height, heat, and temperature of the cell from the fluxes computed by CalcFlux and Erupt.
References
- Cappello, A.; Herault, A.; Bilotta, G.; Ganci, G.; Del Negro, C. MAGFLOW: A physics-based model for the dynamics of lava-flow emplacement. Geol. Soc. Spec. Publ. 2016, 426, 357–373. [Google Scholar] [CrossRef]
- Weiss, R.; Munoz, A.J.; Dalrymple, R.A.; Herault, A.; Bilotta, G. Three-dimensional modeling of long-wave runup: Simulation of tsunami inundation with GPU-SPHYSICS. Coast. Eng. Proc. 2011, 32, 8. [Google Scholar] [CrossRef] [Green Version]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D numerical models for predicting river flood inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Rallabandi, B.; Zheng, Z.; Winton, M.; Stone, H.A. Formation of sea ice bridges in narrow straits in response to wind and water stresses. J. Geophys. Res. Ocean. 2017, 122, 5588–5610. [Google Scholar] [CrossRef]
- Bandara, S.; Ferrari, A.; Laloui, L. Modelling landslides in unsaturated slopes subjected to rainfall infiltration using material point method. Int. J. Numer. Anal. Methods Geomech. 2016, 40, 1358–1380. [Google Scholar] [CrossRef]
- Leung, M.F.; Santos, J.R.; Haimes, Y.Y. Risk modeling, assessment, and management of lahar flow threat. Risk Anal. 2003, 23, 1323–1335. [Google Scholar] [CrossRef]
- Zuccarello, F.; Bilotta, G.; Cappello, A.; Ganci, G. Effusion Rates on Mt. Etna and Their Influence on Lava Flow Hazard Assessment. Remote Sens. 2022, 14, 1366. [Google Scholar] [CrossRef]
- Cappello, A.; Ganci, G.; Calvari, S.; Perez, N.M.; Hernandez, P.A.; Silva, S.V.; Cabral, J.; Del Negro, C. Lava flow hazard modelling during the 2014–2015 Fogo eruption, Cape Verde. J. Geophys. Res. Solid Earth 2016, 121, 2290–2303. [Google Scholar] [CrossRef] [Green Version]
- Rickenmann, D. Empirical relationships for debris flows. Nat. Hazards 1999, 19, 47–77. [Google Scholar] [CrossRef]
- Crosta, G.; Cucchiaro, S.; Frattini, P. Validation of semi-empirical relationships for the definition of debris-flow behavior in granular materials. In Proceedings of the 3rd International Conference on Debris-Flow Hazards Mitigation, Davos, Switzerland, 10–12 September 2003; Millpress Science Publication: Rotterdam, The Netherlands, 2003; pp. 821–831. [Google Scholar]
- McDougall, S.; Hungr, O. A model for the analysis of rapid landslide motion across three-dimensional terrain. Can. Geotech. J. 2004, 41, 1084–1097. [Google Scholar] [CrossRef]
- Hungr, O.; McDougall, S. Two numerical models for landslide dynamic analysis. Comput. Geosci. 2009, 35, 978–992. [Google Scholar] [CrossRef]
- Sosio, R.; Crosta, G.B.; Hungr, O. Numerical modeling of debris avalanche propagation from collapse of volcanic edifices. Landslides 2012, 9, 315–334. [Google Scholar] [CrossRef]
- Pastor, M.; Blanc, T.; Haddad, B.; Petrone, S.; Sanchez Morles, M.; Drempetic, V.; Issler, D.; Crosta, G.B.; Cascini, L.; Sorbino, G.; et al. Application of a SPH depth-integrated model to landslide run-out analysis. Landslides 2014, 11, 793–812. [Google Scholar] [CrossRef] [Green Version]
- Wang, W.; Chen, G.Q.; Han, Z.; Zhou, S.H.; Zhang, H.; Jing, P.D. 3D numerical simulation of debris-flow motion using SPH method incorporating non-Newtonian fluid behavior. Nat. Hazards 2016, 81, 1981–1998. [Google Scholar] [CrossRef]
- Fernández-Nieto, E.D.; Garres-Díaz, J.; Mangeney, A.; Narbona-Reina, G. A multilayer shallow model for dry granular flows with the-rheology: Application to granular collapse on erodible beds. J. Fluid Mech. 2016, 798, 643–681. [Google Scholar] [CrossRef] [Green Version]
- Juez, C.; Murillo, J.; García-Navarro, P. 2D simulation of granular flow over irregular steep slopes using global and local coordinates. J. Comput. Phys. 2013, 255, 166–204. [Google Scholar] [CrossRef]
- Pirulli, M.; Bristeau, M.O.; Mangeney, A.; Scavia, C. The effect of the earth pressure coefficients on the runout of granular material. Environ. Model. Softw. 2007, 22, 1437–1454. [Google Scholar] [CrossRef]
- Savage, S.B.; Hutter, K. The motion of a finite mass of granular material down a rough incline. J. Fluid Mech. 1989, 199, 177–215. [Google Scholar] [CrossRef]
- Nakamura, H.; Fathani, T.F.; Karna, A.K. Analysis of land-slide debris and its hazard area prediction. In Proceedings of the International Symposium on Landslide Mitigation and Protection of Cultural and Natural Heritage, Kyoto, Japan, 21–25 January 2002; pp. 173–189. [Google Scholar]
- Fathani, T.F.; Legono, D.; Karnawati, D. A Numerical Model for the Analysis of Rapid Landslide Motion. Geotech. Geol. Eng. 2017, 35, 2253–2268. [Google Scholar] [CrossRef]
- Iverson, R.M.; Reid, M.E.; LaHusen, R.G. Debris Flow mobilization from landslides. Ann. Rev. Earth Planet. Sci. 1997, 25, 85–138. [Google Scholar] [CrossRef]
- Castelli, F.; Lentini, V.; Venti, A.D. Evaluation of Unsaturated Soil Properties for a Debris-Flow Simulation. Geosciences 2021, 11, 64. [Google Scholar] [CrossRef]
- Xu, W.J.; Dong, X.Y. Simulation and verification of landslide tsunamis using a 3D SPH-DEM coupling method. Comput. Geotech. 2021, 129, 103803. [Google Scholar] [CrossRef]
- Xu, W.J.; Zhang, H.Y. Research on the effect of rock content and sample size on the strength behavior of soil-rock mixture. Bull. Eng. Geol. Environ. 2021, 80, 2715–2726. [Google Scholar] [CrossRef]
- Felpeto, A.; Martí, J.; Ortiz, R. Automatic GIS-based system for volcanic hazard assessment. J. Volcanol. Geotherm. Res. 2007, 166, 106–116. [Google Scholar] [CrossRef]
- Favalli, M.; Pareschi, M.T.; Neri, A.; Isola, I. Forecasting lava flow paths by a stochastic approach. Geophys. Res. Lett. 2005, 32, L03305. [Google Scholar] [CrossRef]
- De’ Michieli Vitturi, M.; Tarquini, S. MrLavaLoba: A new probabilistic model for the simulation of lava flow as a settling process. J. Volcanol. Geotherm. Res. 2018, 349, 323–334. [Google Scholar] [CrossRef]
- Harris, A.J.L.; Rowland, S.K. FLOWGO: A kinematic thermorheological model for lava flowing in a channel. Bull. Volcanol. 2001, 63, 20–44. [Google Scholar] [CrossRef]
- Harris, A.; Favalli, M.; Wright, R.; Garbeil, H. Hazard assessment at Mount Etna using a hybrid lava flow inundation model and satellite-based land classification. Nat. Hazards 2011, 58, 1001–1027. [Google Scholar] [CrossRef]
- Chevrel, M.O.; Labroquère, J.; Harris, A.; Rowland, S. PyFLOWGO: An open-source platform for simulation of channelized lava thermo-rheological properties. Comput. Geosci. 2018, 111, 167–180. [Google Scholar] [CrossRef] [Green Version]
- Hidaka, M.; Goto, A.; Umino, S.; Fujita, E. VTFS project: Development of the lava flow simulation code LavaSIM with a model for three-dimensional convection, spreading, and solidification: VTFS PROJECT. Geochem. Geophys. Geosyst. 2005, 6, Q07008. [Google Scholar] [CrossRef] [Green Version]
- Bilotta, G.; Hérault, A.; Cappello, A.; Ganci, G.; Del Negro, C. GPUSPH: A Smoothed Particle Hydrodynamics model for the thermal and rheological evolution of lava flows. Geol. Soc. Spec. Publ. 2016, 426, 387–408. [Google Scholar] [CrossRef]
- Lacasta, A.; Juez, C.; Murillo, J.; García-Navarro, P. An efficient solution for hazardous geophysical flows simulation using GPUs. Comput. Geosci. 2015, 78, 63–72. [Google Scholar] [CrossRef]
- Juez, C.; Lacasta, A.; Murillo, J.; Garcia-Navarra, P. An efficient GPU implementation for a faster simulation of unsteady bed-load transport. J. Hydraul. Res. 2016, 54, 275–288. [Google Scholar] [CrossRef]
- Tafuni, A.; Domínguez, J.M.; Vacondio, R.; Crespo, A.J.C. A versatile algorithm for the treatment of open boundary conditions in Smoothed particle hydrodynamics GPU models. Comput. Methods Appl. Mech. Eng. 2018, 342, 604–624. [Google Scholar] [CrossRef]
- Domínguez, J.M.; Crespo, A.J.C.; Valdez-Balderas, D.; Rogers, B.D.; Gómez-Gesteira, M. New multi-GPU implementation for smoothed particle hydrodynamics on heterogeneous clusters. Comput. Phys. Commun. 2013, 184, 1848–1860. [Google Scholar] [CrossRef]
- Bilotta, G.; Rustico, E.; Hérault, A.; Vicari, A.; Russo, G.; Del Negro, G.; Gallo, G. Porting and optimizing MAGFLOW on CUDA. Ann. Geophys. 2011, 54, 580–591. [Google Scholar] [CrossRef]
- Giordano, D.; Dingwell, D.B. Viscosity of hydrous Etna basalt: Implications for Plinian-style basaltic eruptions. Bull. Volcanol. 2003, 65, 8–14. [Google Scholar] [CrossRef]
- Spataro, W.; Avolio, M.V.; Lupiano, V.; Trunfio, G.A.; Rongo, R.; D’Ambrosio, D. The latest release of the lava flows simulation model SCIARA: First application to Mt Etna (Italy) and solution of the anisotropic flow direction problem on an ideal surface. Procedia Comput. Sci. 2010, 1, 17–26. [Google Scholar] [CrossRef] [Green Version]
- Vicari, A.; Herault, A.; Del Negro, C.; Coltelli, M.; Marsella, M.; Proietti, C. Modeling of the 2001 lava flow at Etna volcano by a cellular automata approach. Environ. Model. Softw. 2007, 22, 1465–1471. [Google Scholar] [CrossRef]
- Rogic, N.; Bilotta, G.; Ganci, G.; Thompson, J.L.; Cappello, A.; Rymer, H.; Ramsey, M.S.; Ferrucci, F. The impact of dynamic emissivity-temperature trends on spaceborne data of the 2001 Mount Etna eruption. Remote Sens. 2022, 14, 1641. [Google Scholar] [CrossRef]
- Shitzer, A. Wind chill equivalent temperatures—Regarding the impact due to the variability of the environmental convective heat transfer coefficient. Int. J. Biometeorol. 2006, 50, 224–232. [Google Scholar] [CrossRef] [PubMed]
- Cesca, M.; D’Agostino, V. Comparison between FLO-2D and RAMMS in debris-flow modelling: A case study in the Dolomites. WIT Trans. Eng. Sci. 2008, 60, 197–206. [Google Scholar] [CrossRef] [Green Version]
- Tarquini, S.; Isola, I.; Favalli, M.; Battistini, A. TINITALY, a Digital Elevation Model of Italy with a 10 Meters Cell Size; Version 1.0; Istituto Nazionale di Geofisica e Vulcanologia (INGV): Roma, Italy, 2007. [Google Scholar] [CrossRef]
- Ganci, G.; Bilotta, G.; Cappello, A.; Hérault, A.; Del Negro, C. HOTSAT: A multiplatform system for the satellite thermal monitoring of volcanic activity. In Detecting Modelling and Responding to Effusive Eruptions; Harris, A., de Groeve, T., Garel, F., Carn, S.A., Eds.; Geological Society: London, UK, 2016; p. 426. [Google Scholar]
- Calvari, S.; Bilotta, G.; Bonaccorso, A.; Caltabiano, T.; Cappello, A.; Corradino, C.; Del Negro, C.; Ganci, G.; Neri, M.; Pecora, E.; et al. The VEI 2 Christmas 2018 Etna eruption: A small but intense eruptive event or the starting phase of a larger one? Remote Sens. 2020, 12, 905. [Google Scholar] [CrossRef] [Green Version]
- Ganci, G.; Cappello, A.; Zago, V.; Bilotta, G.; Hérault, A.; Del Negro, C. 3D Lava flow mapping of the 17–25 May 2016 Etna eruption using tri-stereo optical satellite data. Ann. Geophys. 2019, 62, VO220. [Google Scholar] [CrossRef]
- Bilotta, G.; Cappello, A.; Hérault, A.; Del Negro, C. Influence of topographic data uncertainties and model resolution on the numerical simulation of lava flows. Environ. Model. Softw. 2019, 112, 1–15. [Google Scholar] [CrossRef]
- Rustico, E.; Bilotta, G.; Hérault, A.; Del Negro, C.; Gallo, G. Scalable multi-gpu implementation of the MAGFLOW simulator. Ann. Geophys. 2011, 54, 5. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cappello, A.; Bilotta, G.; Ganci, G. Modeling of Geophysical Flows through GPUFLOW. Appl. Sci. 2022, 12, 4395. https://doi.org/10.3390/app12094395
Cappello A, Bilotta G, Ganci G. Modeling of Geophysical Flows through GPUFLOW. Applied Sciences. 2022; 12(9):4395. https://doi.org/10.3390/app12094395
Chicago/Turabian StyleCappello, Annalisa, Giuseppe Bilotta, and Gaetana Ganci. 2022. "Modeling of Geophysical Flows through GPUFLOW" Applied Sciences 12, no. 9: 4395. https://doi.org/10.3390/app12094395
APA StyleCappello, A., Bilotta, G., & Ganci, G. (2022). Modeling of Geophysical Flows through GPUFLOW. Applied Sciences, 12(9), 4395. https://doi.org/10.3390/app12094395