
Comparative Study of Permanent-Magnet Synchronous Machines with Different Rotor Topologies for High-Speed Applications




Abstract
:1. Introduction
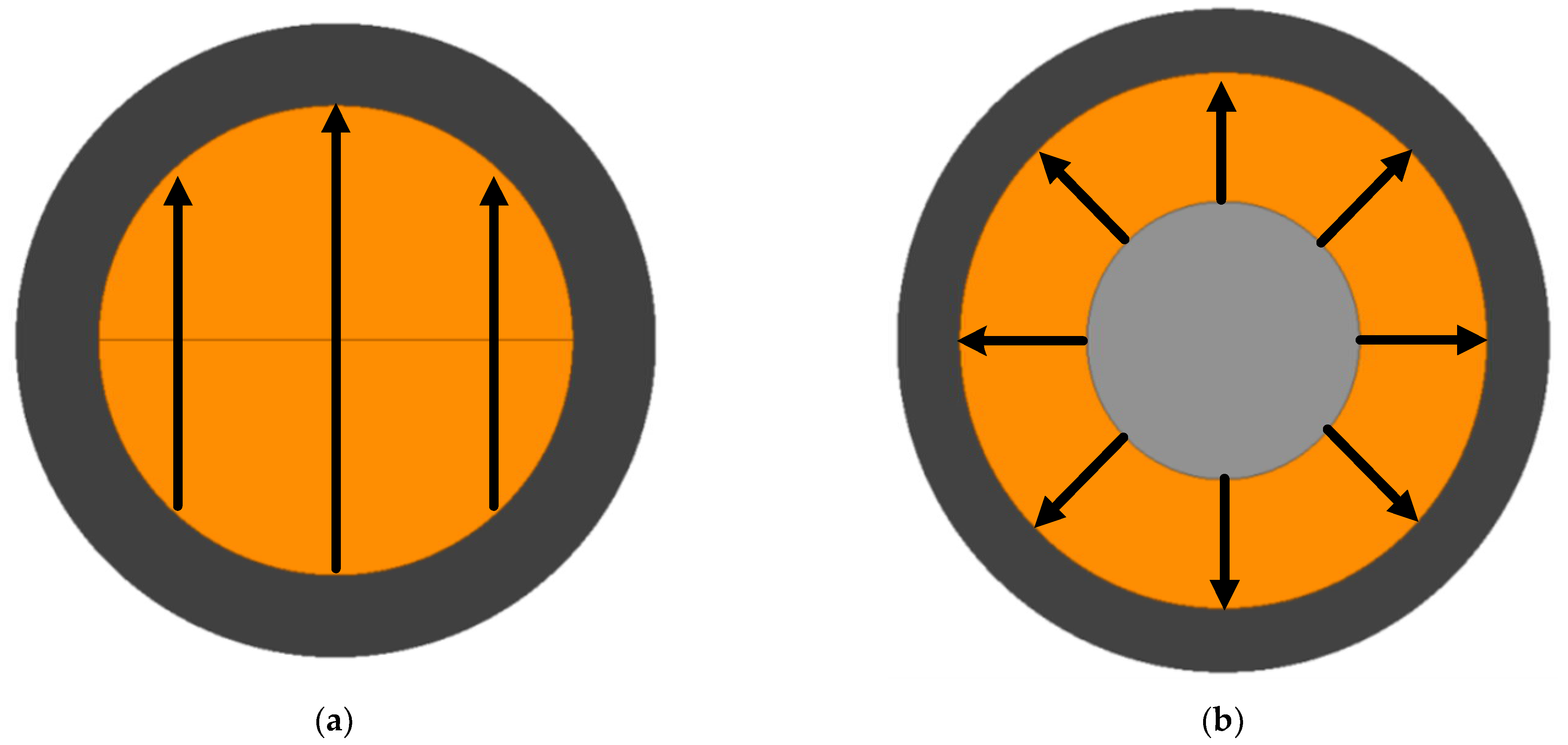
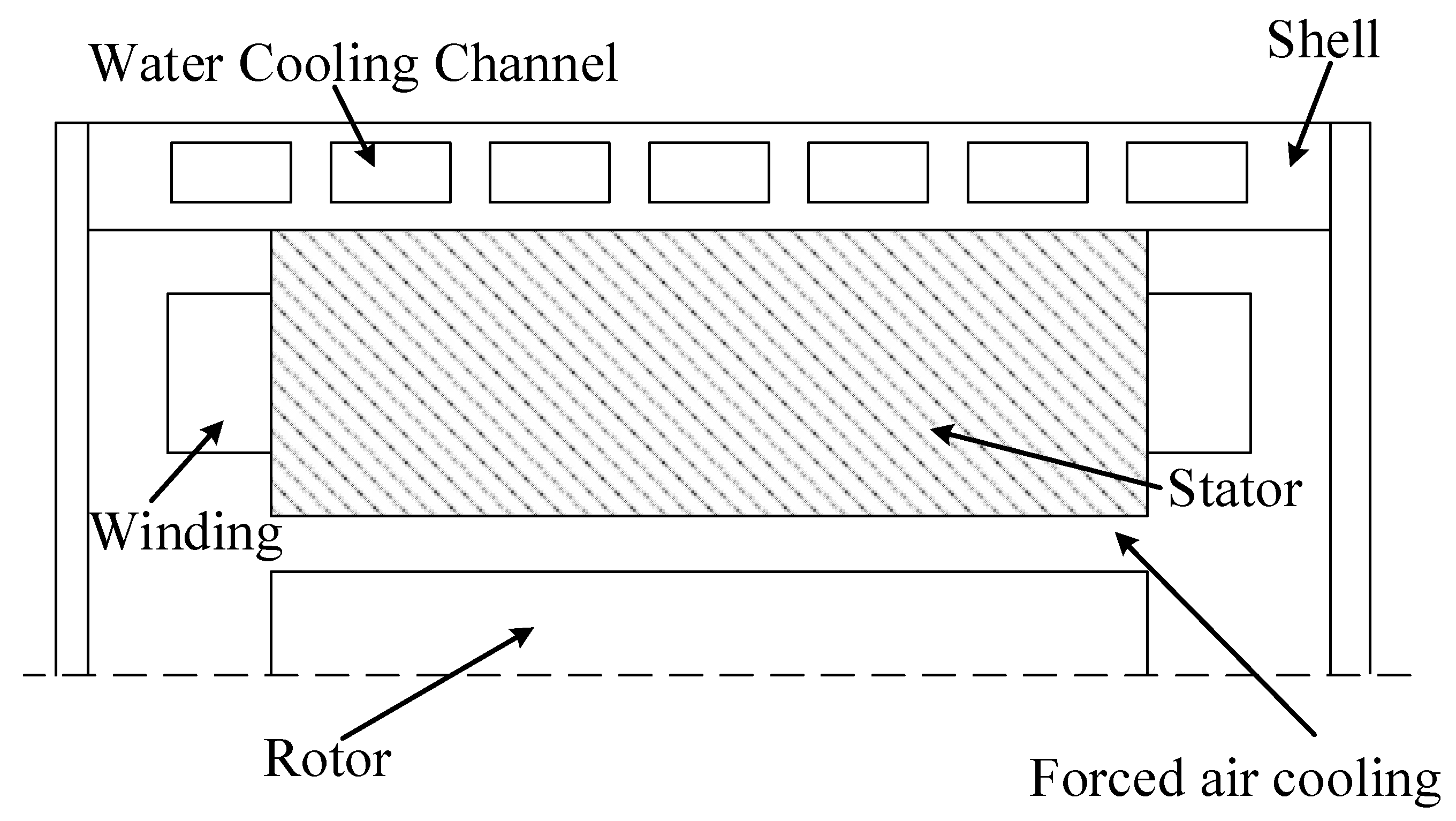
2. General HSPMSM Structure
3. Mechanical–Electromagnetic Performance Analysis
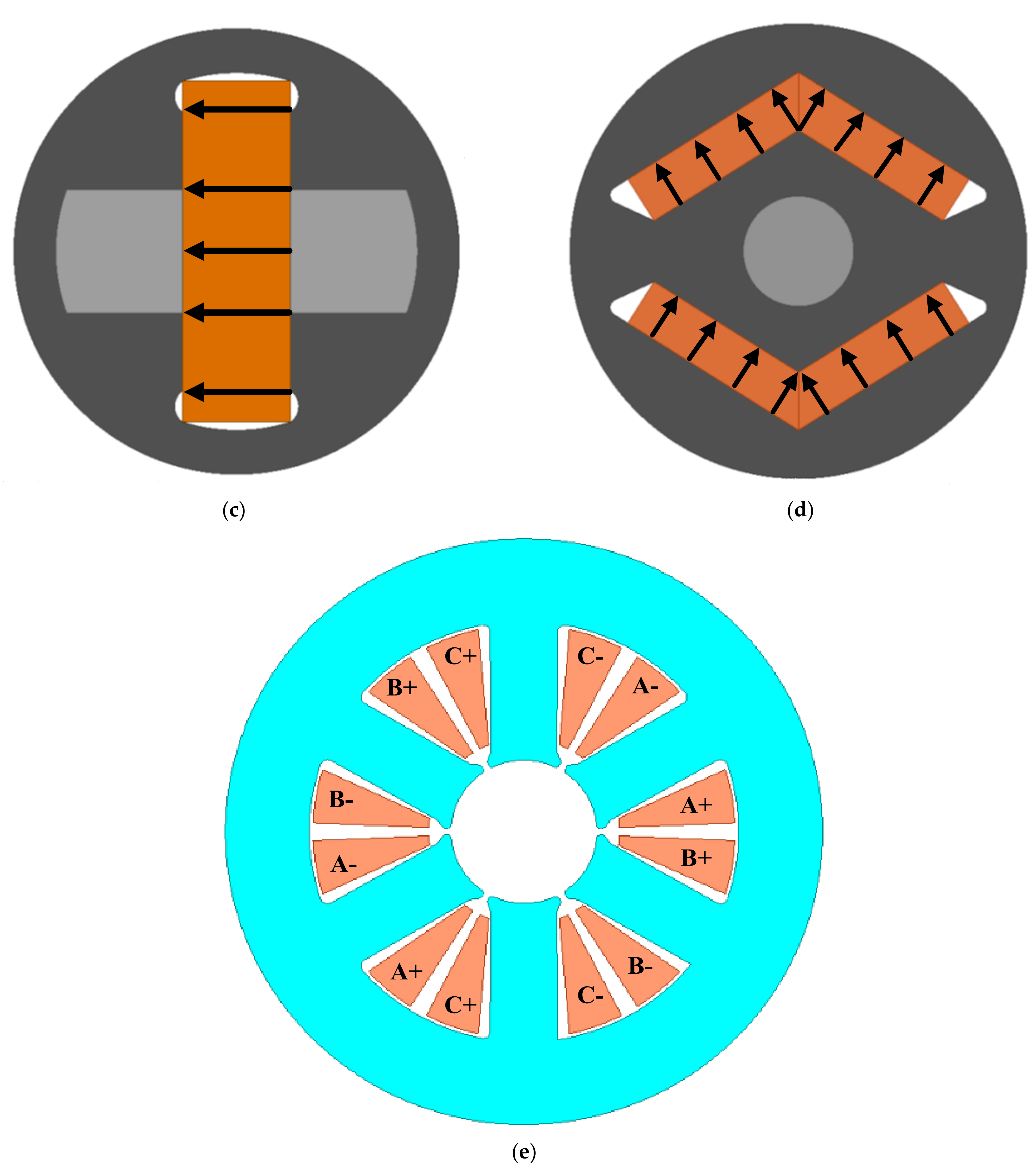
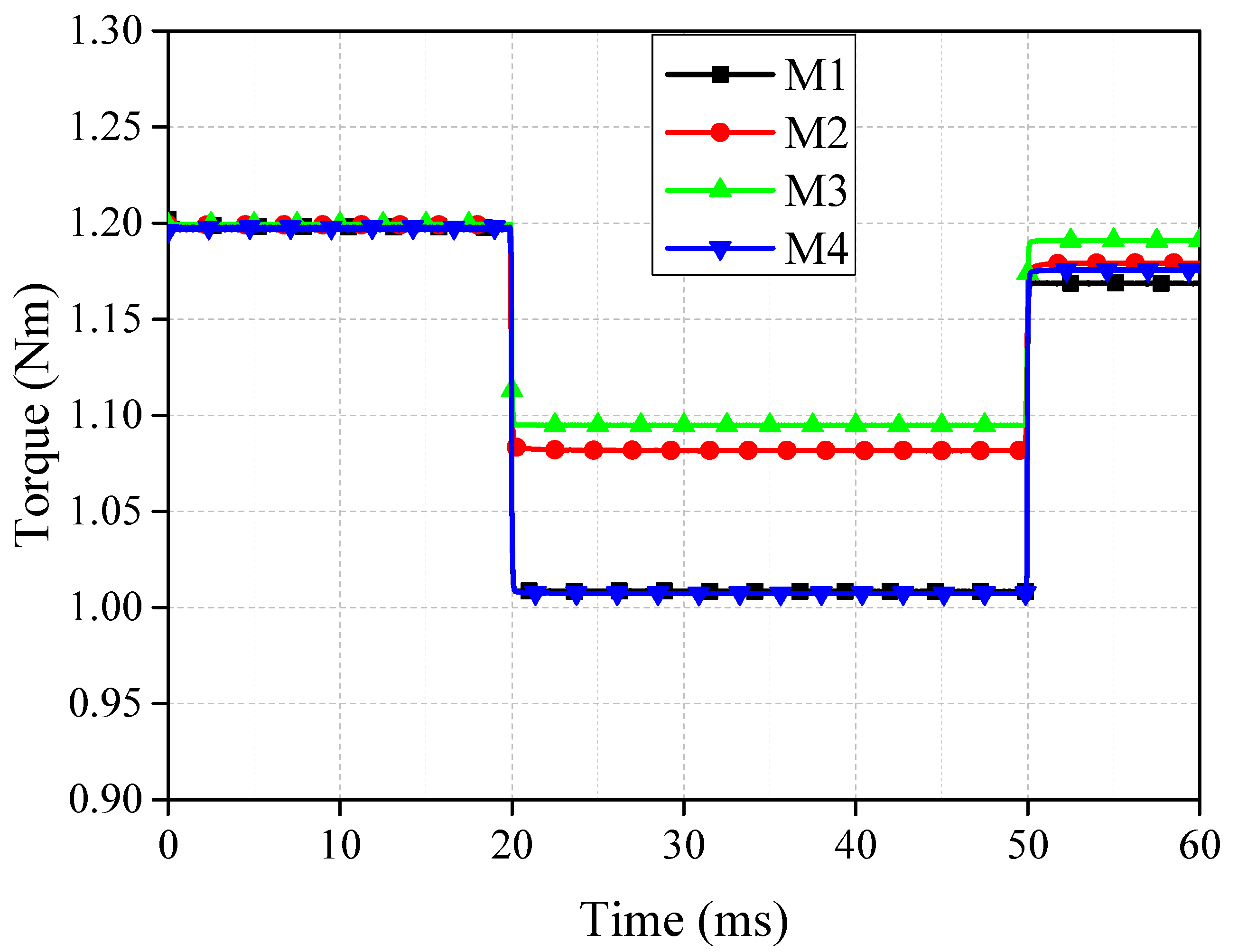
3.1. Electromagnetic Performance Comparison
3.2. Mechanical and Rotor Dynamics Performance Analysis
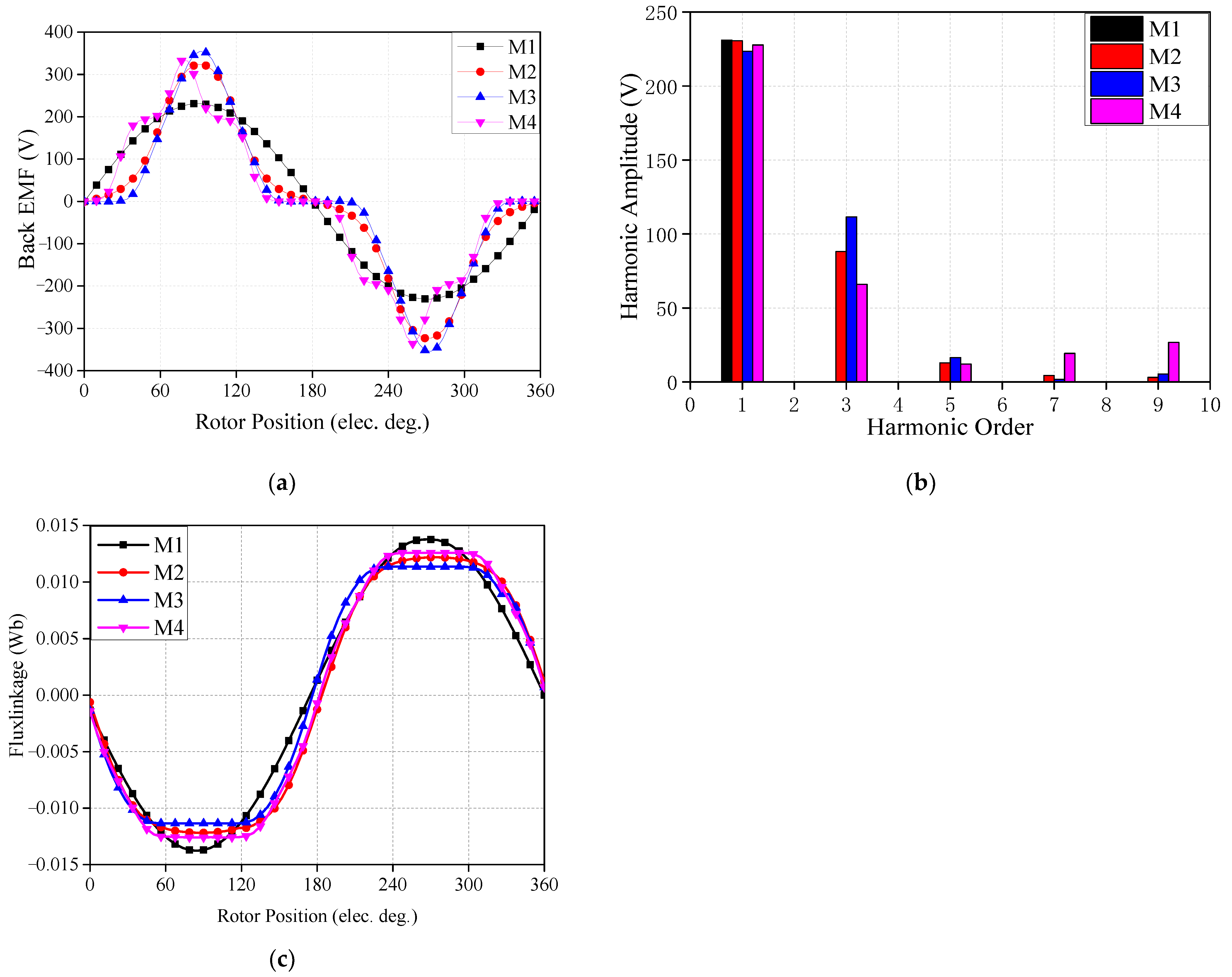
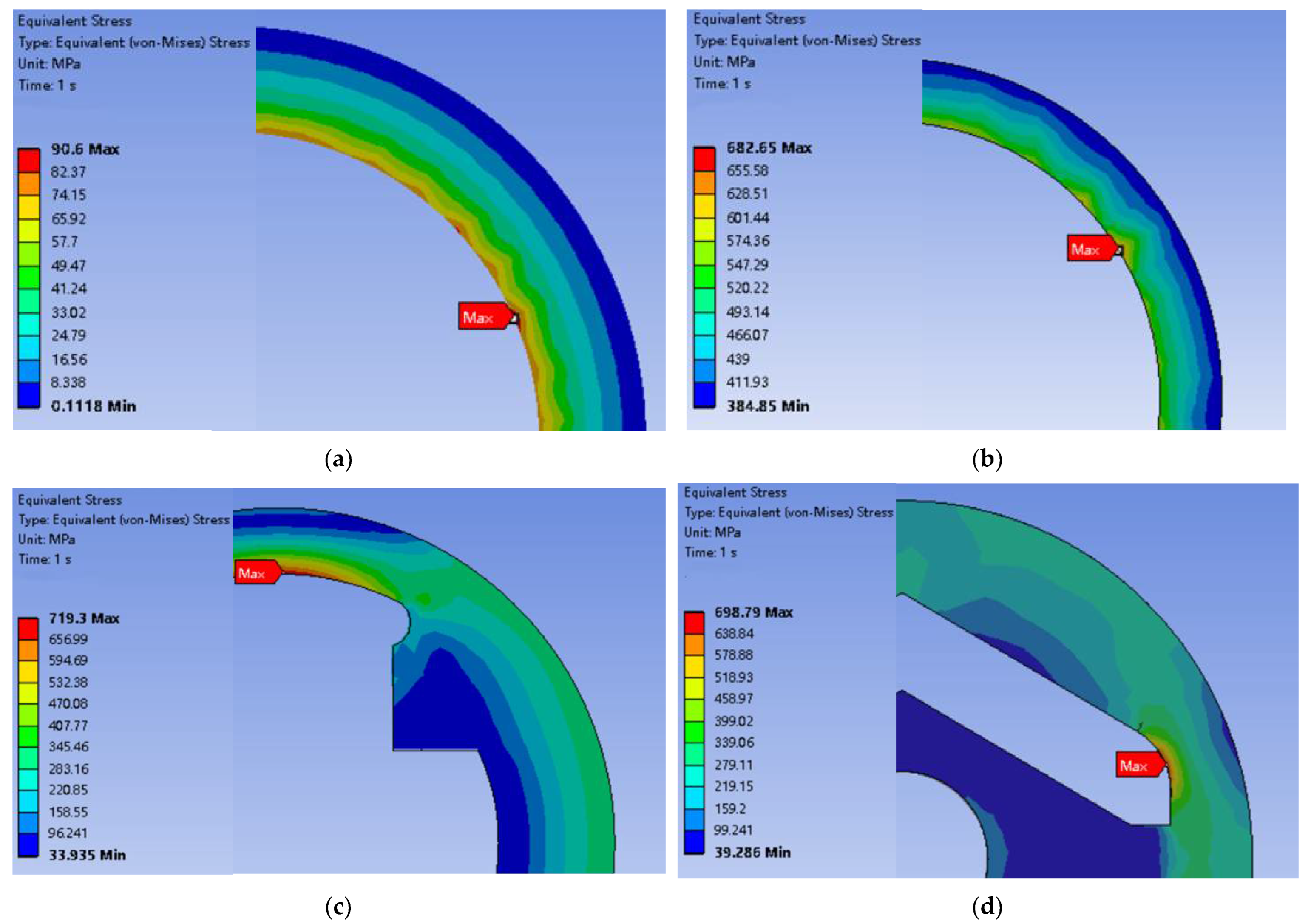
3.2.1. Mechanical Stress Analysis
- (1)
- maximal stresses in the sleeve cannot exceed their permissible safety stress;
- (2)
- contact force between PM and sleeve is high enough to meet torque transfer;
- (3)
- rate rotor speed is below the first critical speed, and its difference needs to be more than 15% at least.
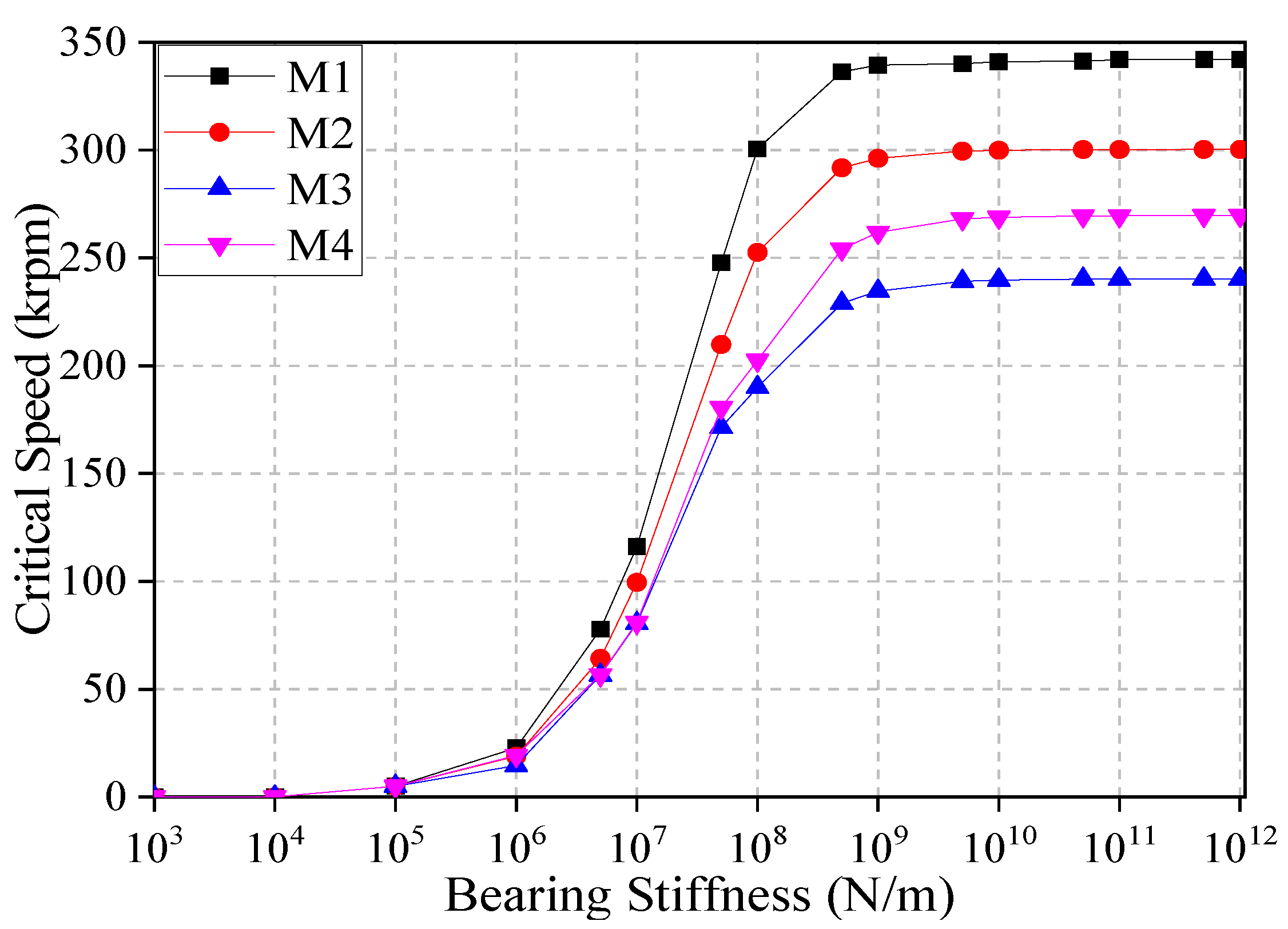
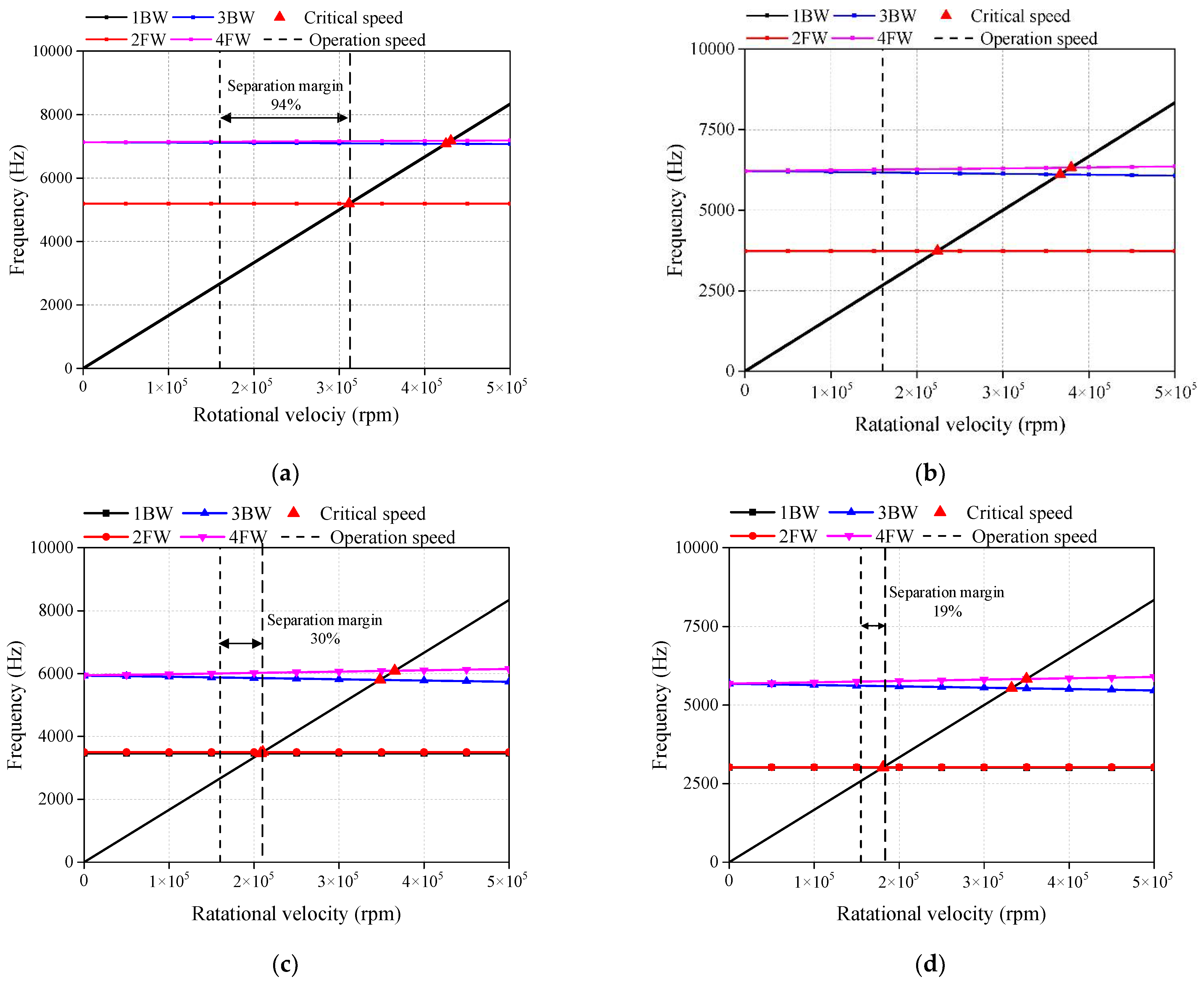
3.2.2. Rotor Dynamic Performance
4. Losses Analysis
4.1. Core Loss
4.2. Copper Loss
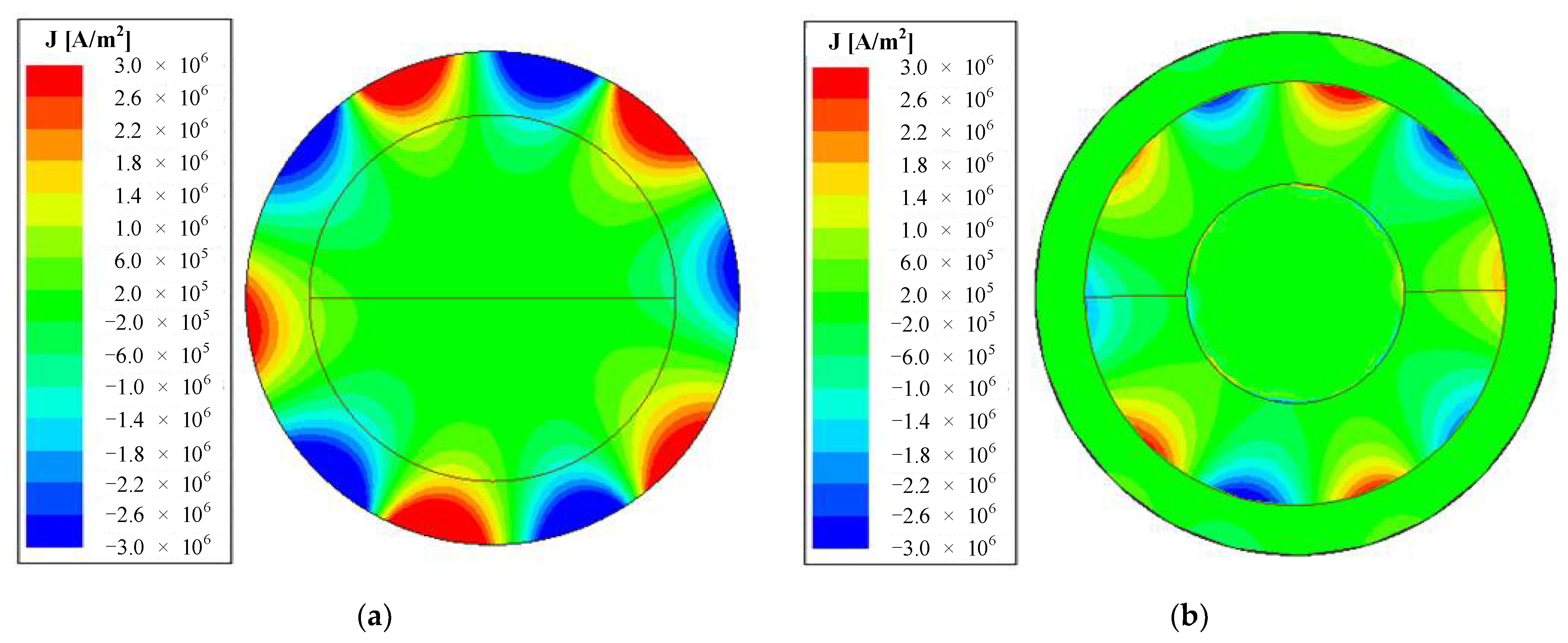
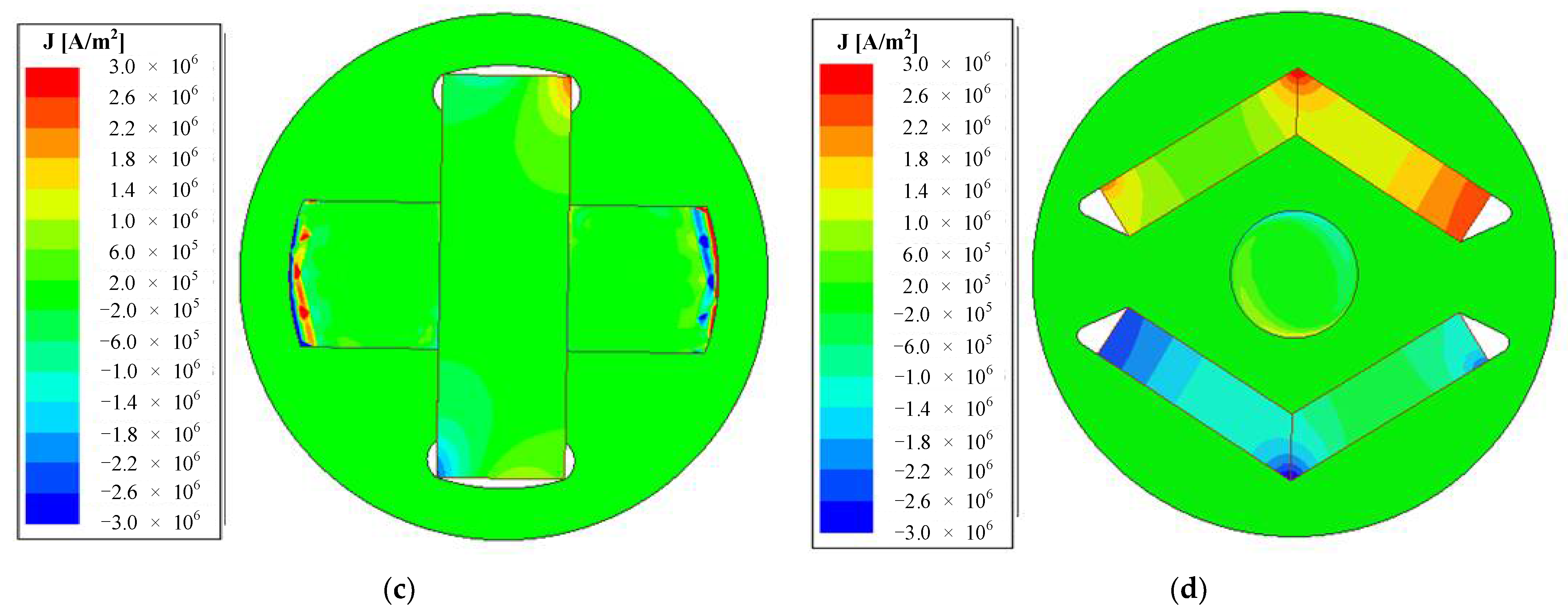
4.3. Eddy Current Loss
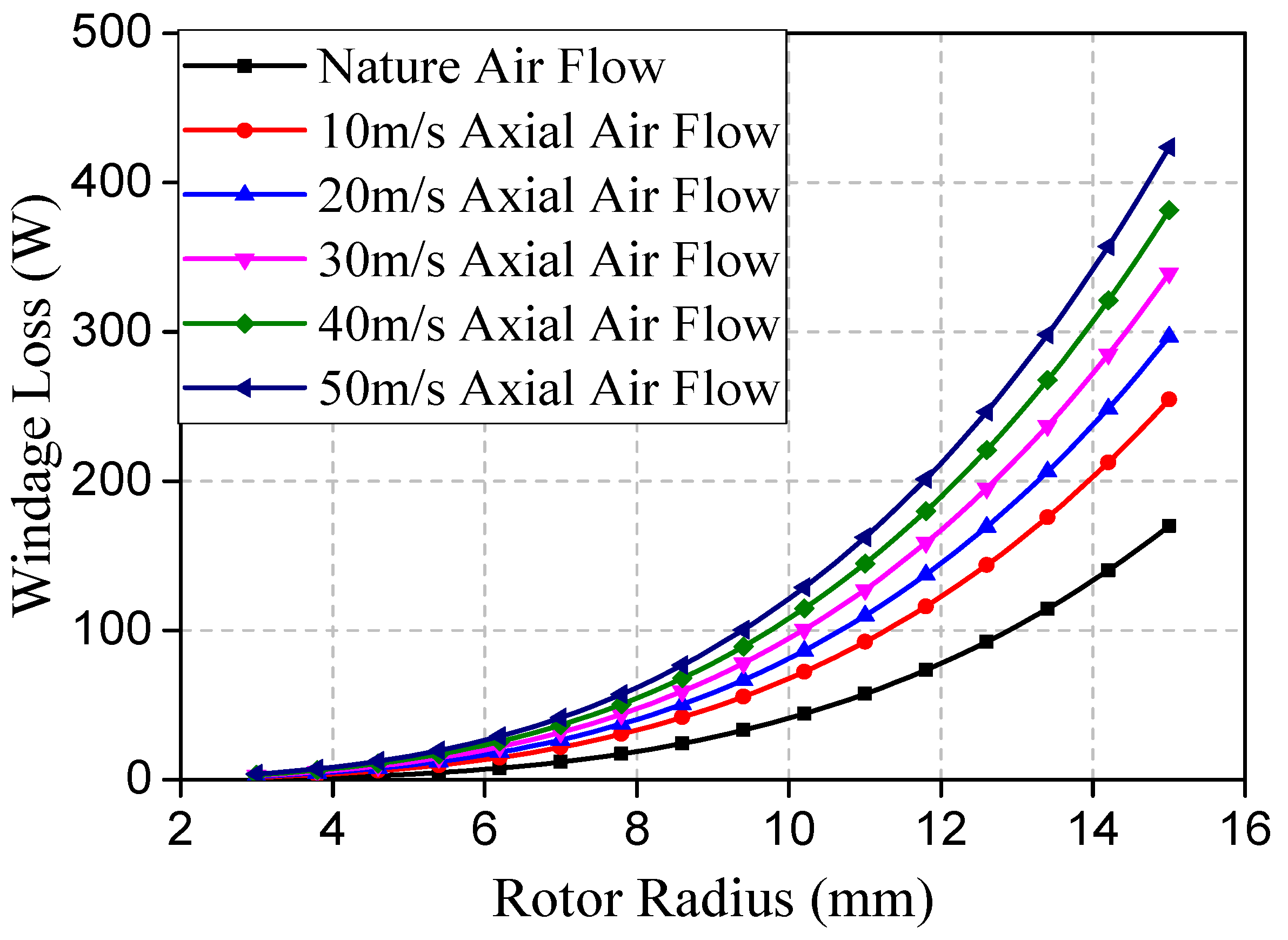
4.4. Mechanical Loss
5. Thermal Analysis
6. Results and Discussion
7. Conclusions
- (1)
- As the rotor diameter of M1 was the smallest, it presented better electromagnetic and mechanical performance. However, it showed poor temperature behavior due to its high loss density. Meanwhile, this topology was the most difficult solution to implement. So, it is only suitable for low-power applications.
- (2)
- The rotor structure of M2 was very simple to implement; thus, its manufacturing process was easier, and its loss was much lower than that of other HSPMSMs. It achieved quite good electromagnetic, thermal, and mechanical performance. In most applications, M2 is a popular solution.
- (3)
- Both M3 and M4 were relatively easy to fabricate since no sleeve was required. On the other hand, as high-silicon sheets were adopted, the rotor loss of these two machines was high. Considering the rotor temperature distribution, M4 faced a great risk of irreversible demagnetization. Though M3 and M4 are not suitable for fuel-cell electric-vehicle air compressor applications, they could be designed with better comprehensive performance under different weights.
- (4)
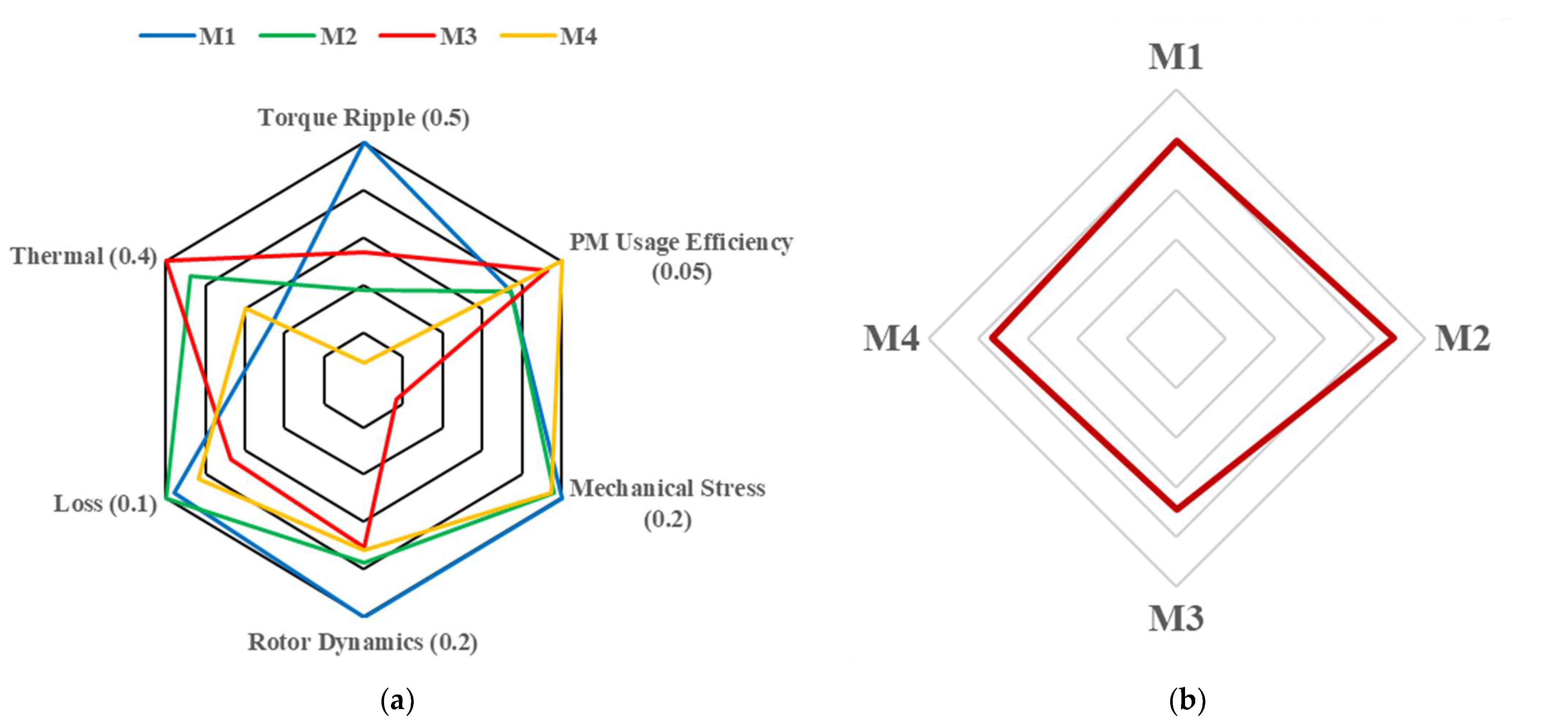
- The weighted-average method was used to judge the performance of these HSPMSMs. For different applications, a different weighted coefficient could be applied, and the best topology could be obtained.
- (5)
- In further work, an interesting issue could be to refine the optimal analytical results, so that it could be better adapted to other HS applications while following the same process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lei, Q.; Geng, H.; Zhang, J.; Du, T.; Lv, H.; Yu, L. Design and Research of a Centrifugal Compressor for Automotive Fuel Cell Systems. In Proceedings of the 2018 IEEE International Conference on Mechatronics and Automation (ICMA), Changchun, China, 5–8 August 2018. [Google Scholar]
- Barta, J.; Uzhegov, N.; Losak, P.; Ondrusek, C.; Pyrhonen, J. Squirrel Cage Rotor Design and Manufacturing for High-Speed Applications. IEEE Trans. Electron. 2018, 66, 6768–6778. [Google Scholar] [CrossRef]
- Shen, J.; Qin, X.; Wang, Y. High-speed permanent magnet electrical machines—applications, key issues and challenges. CES Trans. Electr. Mach. Syst. 2018, 2, 23–33. [Google Scholar] [CrossRef]
- Sun, X.; Shi, Z.; Lei, G.; Guo, Y.; Zhu, J. Multi-Objective Design Optimization of an IPMSM Based on Multilevel Strategy. IEEE Trans. Electron. 2021, 68, 139–148. [Google Scholar] [CrossRef]
- Raminosoa, T.; Blunier, B.; Fodorean, D.; Miraoui, A. Design and Optimization of a Switched Reluctance Motor Driving a Compressor for a PEM Fuel-Cell System for Automotive Applications. IEEE Trans. Electron. 2010, 57, 2988–2997. [Google Scholar] [CrossRef]
- Gerada, D.; Mebarki, A.; Brown, N.L.; Gerada, C.; Cavagnino, A.; Boglietti, A. High-Speed Electrical Machines: Technologies, Trends, and Developments. IEEE Trans. Electron. 2014, 61, 2946–2959. [Google Scholar] [CrossRef]
- Uzhegov, N.; Kurvinen, E.; Nerg, J.; Pyrhonen, J.; Sopanen, J.T.; Shirinskii, S. Multidisciplinary Design Process of a 6-Slot 2-Pole High-Speed Permanent-Magnet Synchronous Machine. IEEE Trans. Electron. 2016, 63, 784–795. [Google Scholar] [CrossRef]
- Bartolo, J.B.; He, Z.; Gerada, D.; Lillo, L.D.; Gerada, C. High speed electrical generators, application, materials and design. In Proceedings of the 2013 IEEE Workshop on Electrical Machines Design Control and Diagnosis (WEMDCD), Paris, France, 11–12 March 2013. [Google Scholar]
- Zhang, F.G.; Du, G.H.; Wang, T.Y.; Liu, G.W.; Cao, W.P. Rotor Retaining Sleeve Design for a 1.12-MW High-Speed PM Machine. IEEE Trans. Ind. Appl. 2015, 51, 3675–3685. [Google Scholar] [CrossRef] [Green Version]
- Ahn, J.H.; Cheol, H.; Kim, C.W.; Choi, J.Y. Rotor Design of High-Speed Permanent Magnet Synchronous Motors Considering Rotor Magnet and Sleeve Materials. IEEE Trans. Appl. Supercond. 2017, 28, 5201504. [Google Scholar] [CrossRef]
- Fang, H.; Qu, R.; Li, J.; Zheng, P.; Fan, X. Rotor Design for High-Speed High-Power Permanent-Magnet Synchronous Machines. IEEE Trans. Ind. Appl. 2017, 53, 3411–3419. [Google Scholar] [CrossRef]
- Liu, Y.; Ou, J.; Schiefer, M.; Breining, P.; Grilli, F.; Doppelbauer, M. Application of an Amorphous Core to an Ultra-High-Speed Sleeve-Free Interior Permanent-Magnet Rotor. IEEE Trans. Electron. 2018, 65, 8498–8509. [Google Scholar] [CrossRef]
- Yunkai, H.; Jianguo, Z.; Youguang, G. Thermal Analysis of High-Speed SMC Motor Based on Thermal Network and 3-D FEA With Rotational Core Loss Included. IEEE Trans. Magn. 2009, 45, 4680–4683. [Google Scholar] [CrossRef]
- Uzhegov, N.; Smirnov, A.; Park, C.H.; Ahn, J.H.; Heikkinen, J.; Pyrhonen, J. Design Aspects of High-Speed Electrical Machines With Active Magnetic Bearings for Compressor Applications. IEEE Trans. Electron. 2017, 64, 8427–8436. [Google Scholar] [CrossRef]
- Du, G.; Xu, W.; Zhu, J.; Huang, N. Power Loss and Thermal Analysis for High-Power High-Speed Permanent Magnet Machines. IEEE Trans. Electron. 2020, 67, 2722–2733. [Google Scholar] [CrossRef]
- Zhang, Y.; McLoone, S.; Cao, W.; Qiu, F.; Gerada, C. Power Loss and Thermal Analysis of a MW High-Speed Permanent Magnet Synchronous Machine. IEEE Trans. Energy Convers. 2017, 32, 1468–1478. [Google Scholar] [CrossRef] [Green Version]
- Chebak, A.; Viarouge, P.; Cros, J. Improved Analytical Model for Predicting the Magnetic Field Distribution in High-Speed Slotless Permanent-Magnet Machines. IEEE Trans. Magn. 2015, 51, 8102904. [Google Scholar] [CrossRef]
- Tuysuz, A.; Meyer, F.; Steichen, M.; Zwyssig, C.; Kolar, J.W. Advanced Cooling Methods for High-Speed Electrical Machines. IEEE Trans. Ind. Appl. 2017, 53, 2077–2087. [Google Scholar] [CrossRef]
- Zhang, Z.; Yu, L.; Sun, L.; Qian, L.; Huang, X. Iron Loss Analysis of Doubly Salient Brushless DC Generators. IEEE Trans. Electron. 2015, 62, 2156–2163. [Google Scholar] [CrossRef]
- Zhao, N.; Liu, W. Loss Calculation and Thermal Analysis of Surface-Mounted PM Motor and Interior PM Motor. IEEE Trans. Magn. 2015, 51, 8112604. [Google Scholar] [CrossRef]
- Fang, J.; Liu, X.; Bangcheng, H.; Kun, W. Analysis of Circulating Current Loss for High-Speed Permanent Magnet Motor. IEEE Trans. Magn. 2015, 51, 8200113. [Google Scholar] [CrossRef]
- Van der Geest, M.; Polinder, H.; Ferreira, J.A.; Zeilstra, D. Stator winding proximity loss reduction techniques in high speed electrical machines. In Proceedings of the IEEE International Electric Machines and Drives Conference (IEMDC), Chicago, IL, USA, 12–15 May 2013; pp. 340–346. [Google Scholar]
- Zhang, Y.; McLoone, S.; Cao, W. Electromagnetic Loss Modeling and Demagnetization Analysis for High Speed Permanent Magnet Machine. IEEE Trans. Magn. 2018, 54, 8200405. [Google Scholar] [CrossRef]
- Guo, B.; Huang, Y.; Peng, F.; Dong, J. General Analytical Modeling for Magnet Demagnetization in Surface Mounted Permanent Magnet Machines. IEEE Trans. Electron. 2019, 66, 5830–5838. [Google Scholar] [CrossRef] [Green Version]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value | Unit |
|---|---|---|---|
| Rate power | Pn | 19 | kW |
| Rate speed | nn | 160 | krpm |
| Current density | Cn | 10 | A/mm2 |
| Rate torque | Tn | 1.1 | Nm |
| Efficiency | η | >95% | - |
| Frequency | fn | 2666 | Hz |
| Number of poles | p | 2 | - |
| Number of slots | QS | 6 | - |
| No. of turns per coil | Ns | 20 | - |
| Stator outer diameter | Dso | 80 | mm |
| Core stack length | L | 80 | mm |
| Air gap | δag | 2 | mm |
| PM material | NdFeB (N42SH) | - | - |
| PM remanence | Bre | 1.05 | T |
| PM relative permeability | μ | 1.05 | - |
| Bulk conductivity | σPM | 646,381 | S/m |
| Parameter | M1 | M2 | M3 | M4 |
|---|---|---|---|---|
| Initial outer diameter (mm) | 15–25 | 15–25 | 15–25 | 15–25 |
| Optimized outer diameter (mm) | 15.8 | 18 | 21.4 | 21.4 |
| PM thickness (mm) | 5.9 | 4.1 | 5.2 | 2.3 |
| Shaft diameter (mm) | - | 8.8 | - | 5.2 |
| PM length (mm) | - | - | 16.4 | 16.2 |
| Sleeve material | Ti-6Al-4V | CFC | 10JNEX900 | 10JNEX900 |
| Density (kg/m3) | 4428 | 1800 | 7350 | 7350 |
| Young’s modulus (GPa) | 124.6 | 125 | 200 | 200 |
| Poisson’s ratio | 0.33 | 0.28 | 0.29 | 0.29 |
| Permitted stress (MPa) | 1000 | 1300 | >700 | >700 |
| Bulk conductivity (S/m) | 591,572 | 20,000 | 1,219,510 | 1,219,510 |
| Thermal conductivity (W/(m·K)) | 8.5 | 0.7 | 39 | 39 |
| Loss Distribution | M1 | M2 | M3 | M4 |
|---|---|---|---|---|
| Core loss (W) | 212.34 | 115.87 | 237.54 | 242.12 |
| Copper loss (W) | 202.58 | 208.05 | 208.05 | 208.05 |
| Windage loss (W) | 37.25 | 58.24 | 97.6 | 97.6 |
| Rotor loss (W) | 45.12 | 15.11 | 5.9 | 18.95 |
| Total loss (W) | 495.73 | 397.27 | 594.09 | 566.72 |
| Efficiency | 97.39% | 97.91% | 97.11% | 97.01% |
| Topology | Torque Reduction at Maximal Temperature | Torque Reduction after Returning 20 °C |
|---|---|---|
| M1 | 15.80% | 2.45% |
| M2 | 7.56% | 1.66% |
| M3 | 8.71% | 0.72% |
| M4 | 16.45% | 1.80% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, B.; Zhu, J.; Liu, C.; Li, Y.; Lei, G. Comparative Study of Permanent-Magnet Synchronous Machines with Different Rotor Topologies for High-Speed Applications. Appl. Sci. 2022, 12, 4375. https://doi.org/10.3390/app12094375
Li B, Zhu J, Liu C, Li Y, Lei G. Comparative Study of Permanent-Magnet Synchronous Machines with Different Rotor Topologies for High-Speed Applications. Applied Sciences. 2022; 12(9):4375. https://doi.org/10.3390/app12094375
Chicago/Turabian StyleLi, Bo, Jianguo Zhu, Chengcheng Liu, Yongjian Li, and Gang Lei. 2022. "Comparative Study of Permanent-Magnet Synchronous Machines with Different Rotor Topologies for High-Speed Applications" Applied Sciences 12, no. 9: 4375. https://doi.org/10.3390/app12094375
APA StyleLi, B., Zhu, J., Liu, C., Li, Y., & Lei, G. (2022). Comparative Study of Permanent-Magnet Synchronous Machines with Different Rotor Topologies for High-Speed Applications. Applied Sciences, 12(9), 4375. https://doi.org/10.3390/app12094375