
A Novel PSO-Based Adaptive Filter Structure with Switching Selection Criteria for Active Noise Control

 , , , , , and
, , , , , and
Abstract
:1. Introduction
2. Proposed PSO-Based ANC System with Switching Filter Selection
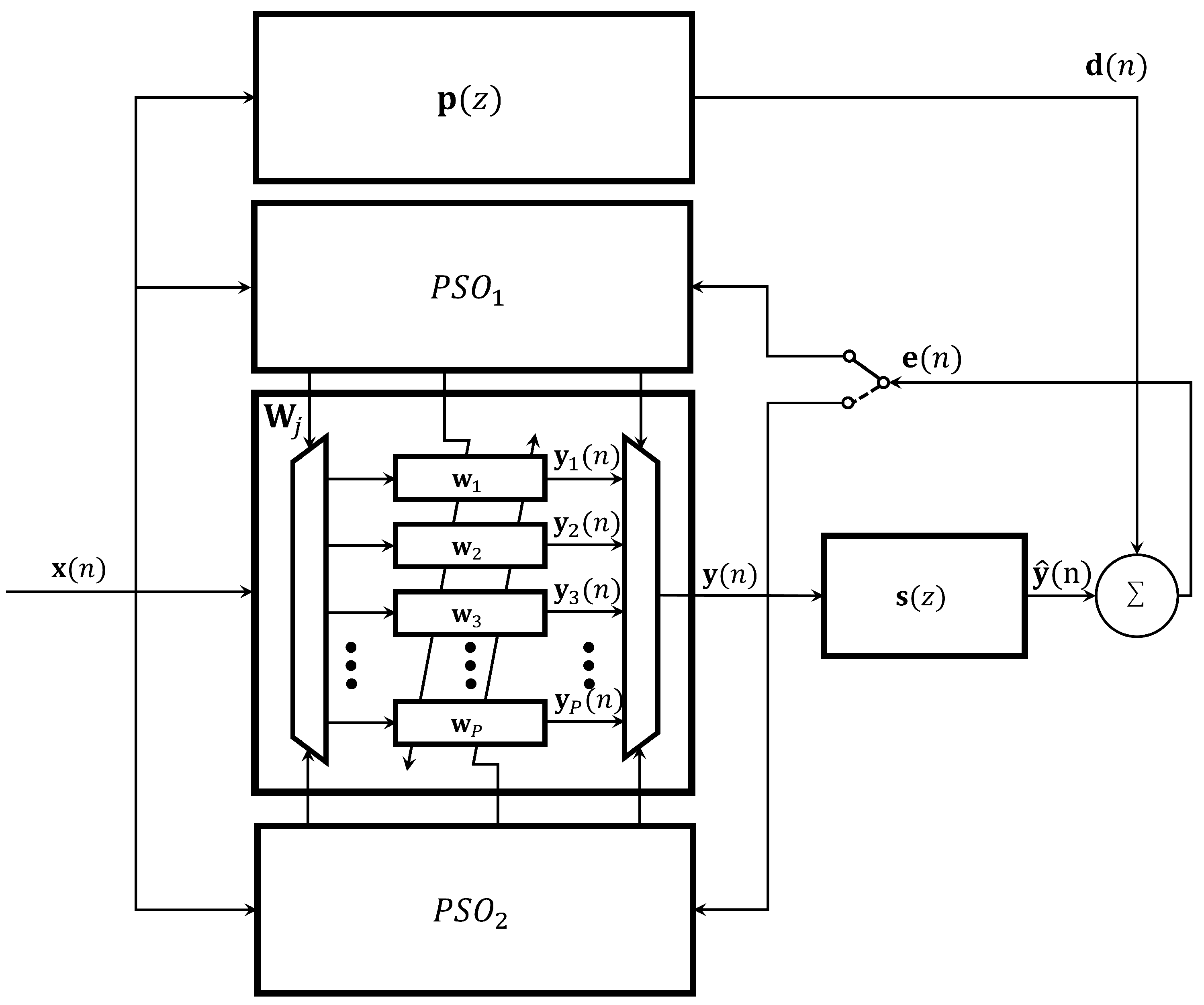
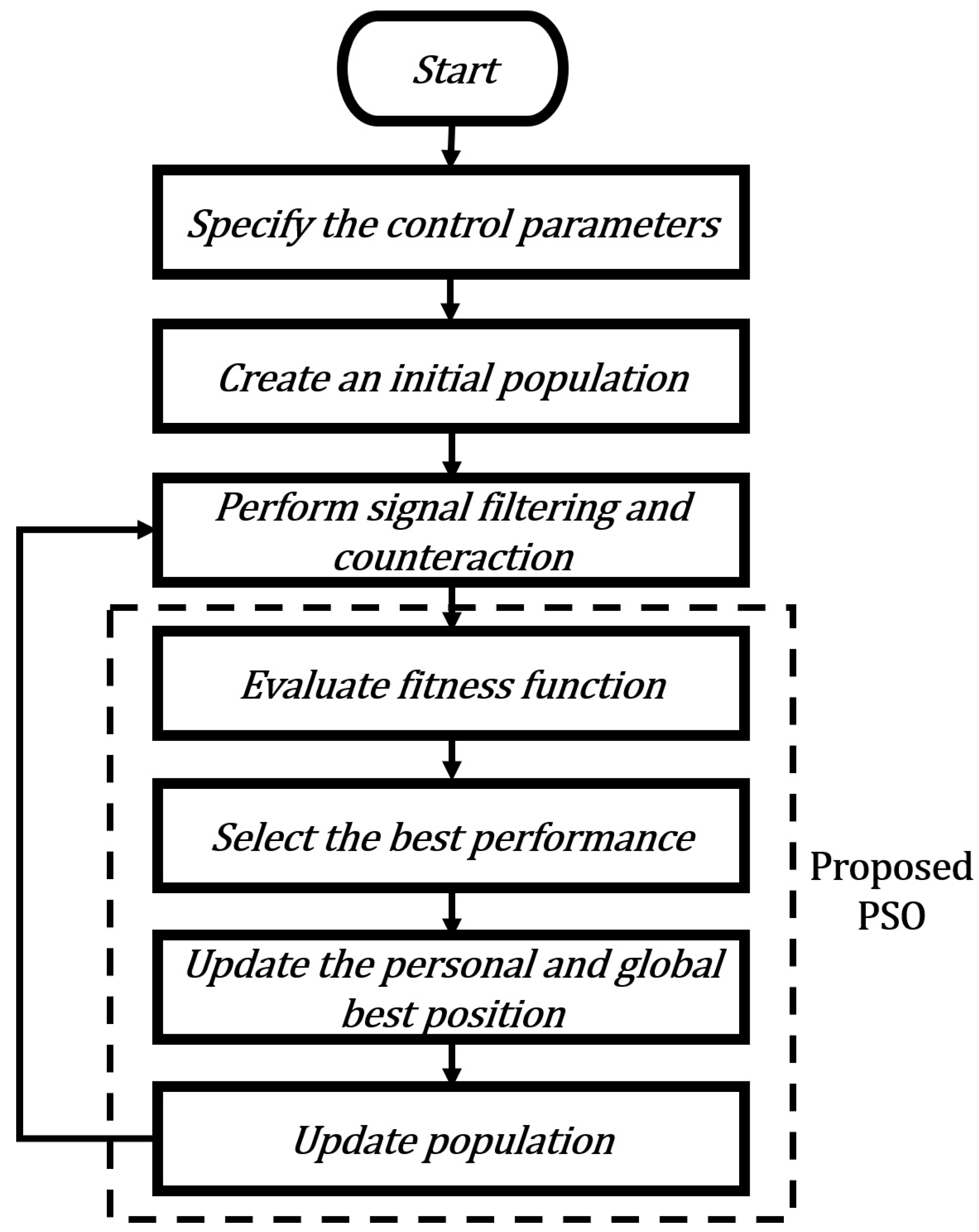
- Specify the control parameters. Here, the PSO-based ANC system is composed of j population matrices , where each matrix is composed of P adaptive filters and each particle represents an adaptive filter, as shown in Equation (1). Therefore, the order N of each adaptive filter defines the dimension of each particle. The whole population is defined as follows:where is the parameter to select between and .
- Create an initial population. At the first iteration , the position of each particle is initialized for both populations, where .where is a gaussian process of length with zero mean and variance = 0.25. The values is a lower bound and is a upper bound, since the impulse response of the primary path is normalized.
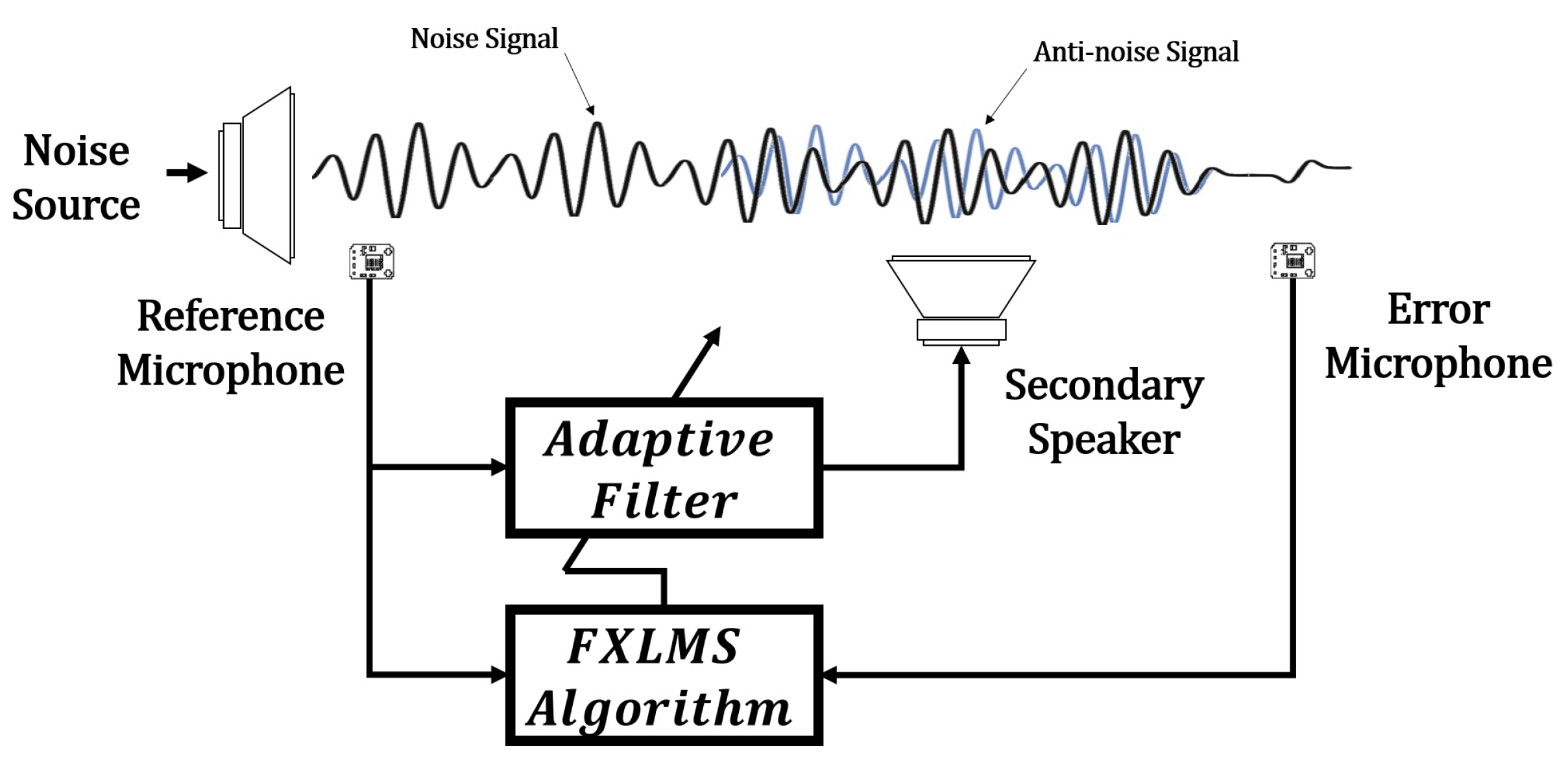
- Perform signal filtering and signal counteraction. The signal travels via primary path to generate the signal . In addition, the signal is processed by the PSO algorithm to update its coefficients. Here, each particle is used to compute a single filter at any generation time n. Once the coefficients are updated, signal is produced and it travels via the secondary path to generate the anti-noise signal . On the other hand, the calculation of signal counteraction or also called residual noise is given by
- Evaluate fitness function. The mean squared error (MSE) of each P error signal, which represents the fitness function of each adaptive filter, is used by two PSO algorithms to determine the best position. Here, the fitness value of the position can be obtained as follows:where T depicts the total number of iterations
- Select the best performance. As can be observed from Figure 3, the proposed ANC system is composed of two PSO algorithms ( and ). Here, each particle of the PSO algorithms has a position and a velocity . Equations (5) and (6) are used to update these parameters as follows:where and are the acceleration coefficients, and are the vectors of random numbers of length N, and are the personal best position and global best position, respectively, and is the inertia weight. In addition, and are defined in the interval [0, 1] and the inertia weight can be obtained as follows:To select between two PSO algorithms ( and ), we propose a selection criteria based on the evaluation of past samples of the error signal to verify significant changes in the MSE level. Equations (8) and (9) are used to evaluate the past samples of the error as follows:Hence, the updates of the position and velocity of each PSO algorithm are ruled by the following equations:where , is a small number close to zero, and is chosen by trial and error [23]. In general, Equations (10) and (12) indicate when the PSO algorithms are updated. If the degree of change of the MSE level is larger than , the algorithm must be updated and transfer its coefficients to the allowing the system to update only one algorithm at a time. On the other hand, if according to Equation (12), must be updated, the new coefficients are transferred to . With the proposed scheme, a fast convergence speed using algorithm is attained, and the MSE level is reduced by employing algorithm.
- Update the personal and global best position. In this step, two variables are selected, the first one is called personal best position, . To find the value of , we perform a comparison between the current value of and the value of as follows:To compute Equation (14) at the first generation, the is defined as . The second variable is denominated as global best position, . To calculate this variable, we compare the result of with the evaluation of the best global position , where , . The computation of the global best position, is given by
3. Simulation Results
- 1.
- We model the primary and secondary paths as finite impulse response (FIR) filters using 256 and 128 coefficients [33], respectively.
- 2.
- The MSE was evaluated at error microphones.
- 3.
- We consider a white Gaussian noise signal with a zero mean as input signal .
- 4.
- Table 1 shows the selected acceleration coefficients and inertia weights to produce the best convergence properties. As is well known, acceleration coefficients are static. Therefore, the optimal values need to be found empirically. In general, the use of low values for and produces smooth particle trajectories [34]. Here, the proper selection of these values have allowed the particles to roam close from good regions which produces more acceleration. Based on [34], we select of the inertia weights () and values for and , as follows:According to previous equation, if the condition is not satisfied, the PSO algorithm may diverge or could present cyclic behavior.
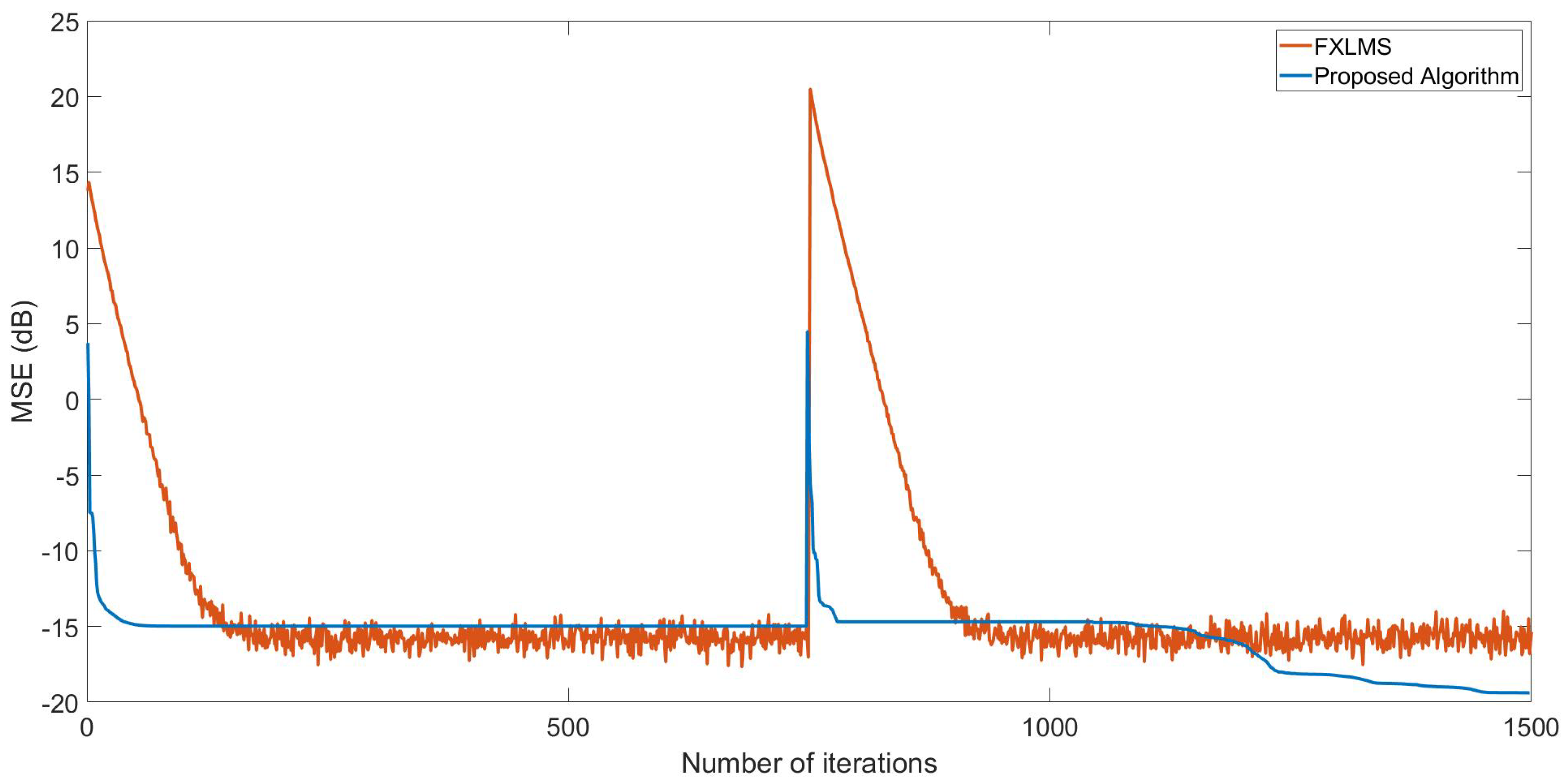
- Comparison between the proposed algorithm and the FXLMS algorithm. To evaluate the MSE level, we use a population of 100 particles. To verify the tracking capabilities of the algorithms, we induce an abrupt change in the middle of the generations (1500) by multiplying the secondary path by −1. The FXLMS step-size was adjusted by trial and error; the value producing the fastest convergence speed was selected.As can be observed from Figure 5, the proposed algorithm exhibits higher convergence speed when compared to the conventional FXLMS. Besides, the FXLMS requires an estimation of the secondary path to avoid instability and low accuracy. In contrast, this estimation is not required when the PSO algorithm is used.
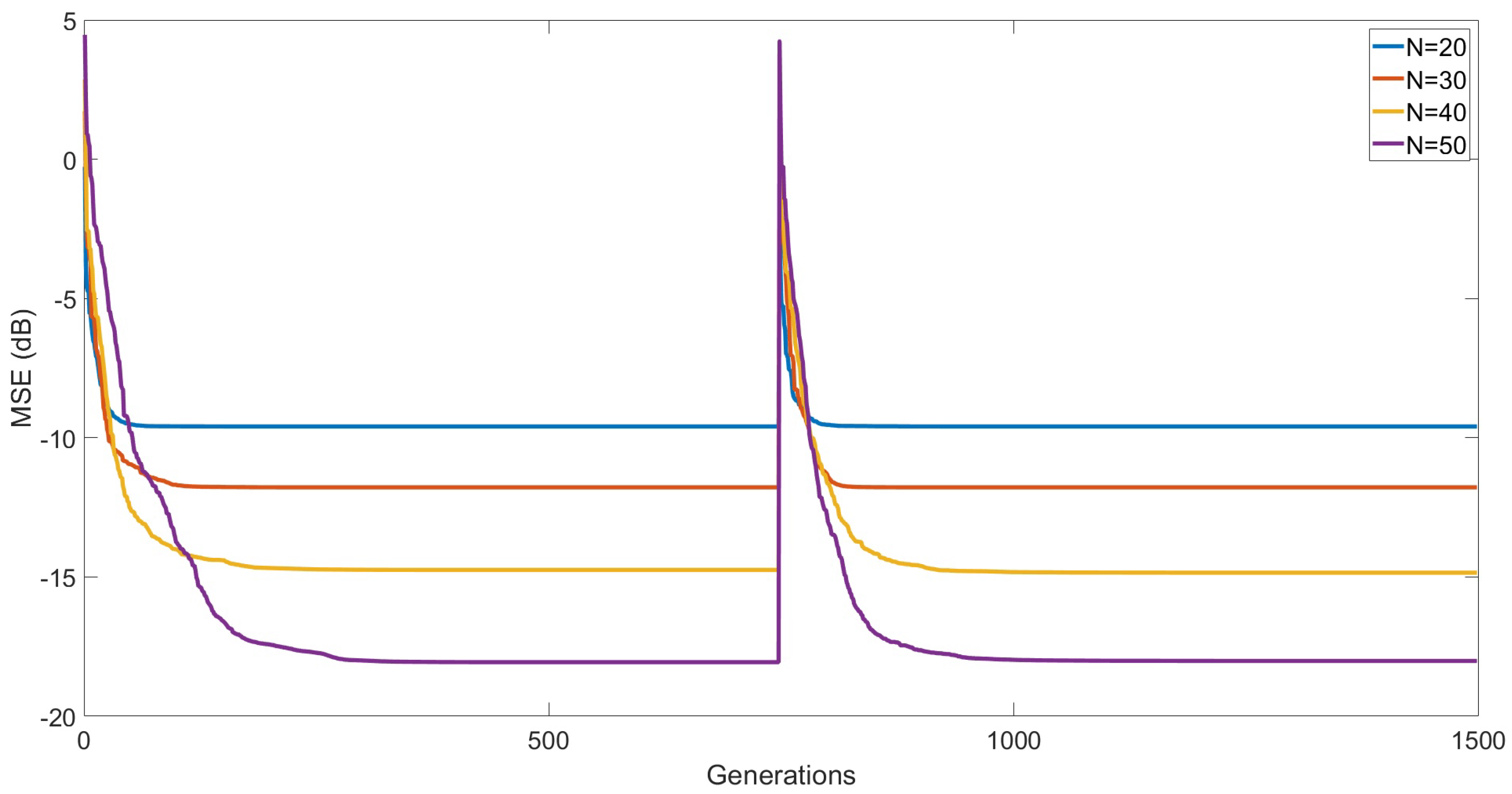
- Effect of changing the order of adaptive filter. To evaluate the MSE level, we use a population of 100 particles and different adaptive filter’s length (N from 20 to 50), as shown in Figure 6. To verify the tracking capabilities of the proposed PSO-based ANC system, we induce an abrupt change in the middle of the generations (1500) by multiplying the secondary path by −1. As can be observed from Figure 6, the MSE level is high when low number of coefficients are used. Otherwise, the use of large number of coefficients improves the MSE level by paying a penalty in terms of convergence speed. In addition, the use of high order adaptive filters demands a high computational cost by improving significantly the MSE level, where this parameter is crucial in practical ANC systems since it determines the level of noise reduction.
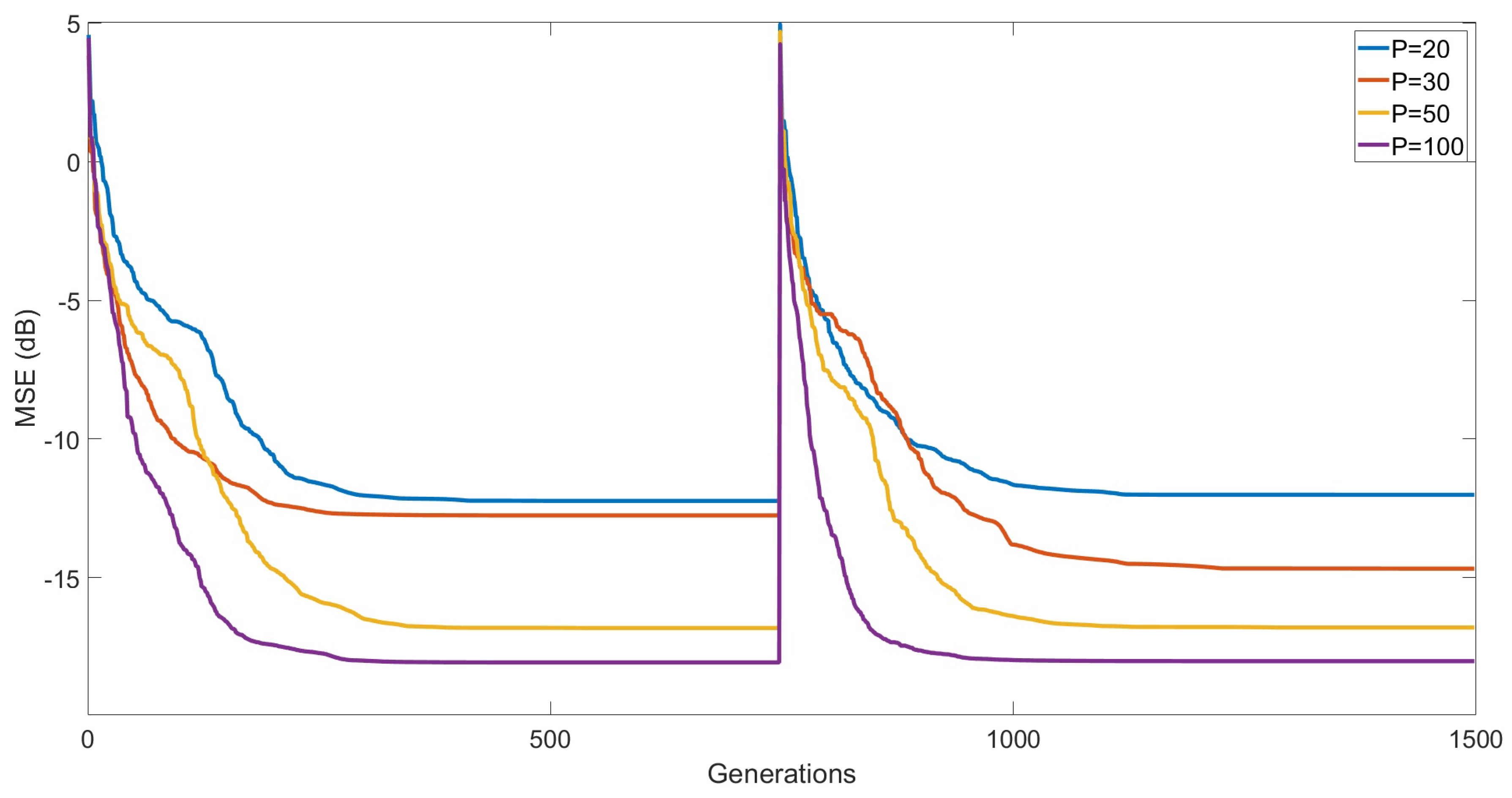
- Effect of changing the number of particles of the PSO algorithm. According to previous results, we obtained the higher level reduction when 50 filter coefficients are used. When selecting a number higher than 50, the performance of the algorithm does not change and remains the same. Therefore, in this experiment, we use this number of filter coefficients and vary the number of particles to verify how the performance of the proposed PSO-based ANC system is affected. As can be observed from Figure 7, the number of particles is an important factor to be considered, especially when high level of noise reduction and fast convergence speed are required. Hence, the use of a large number of particles and high order filters guarantees good convergence properties at the cost of increasing the computational complexity.
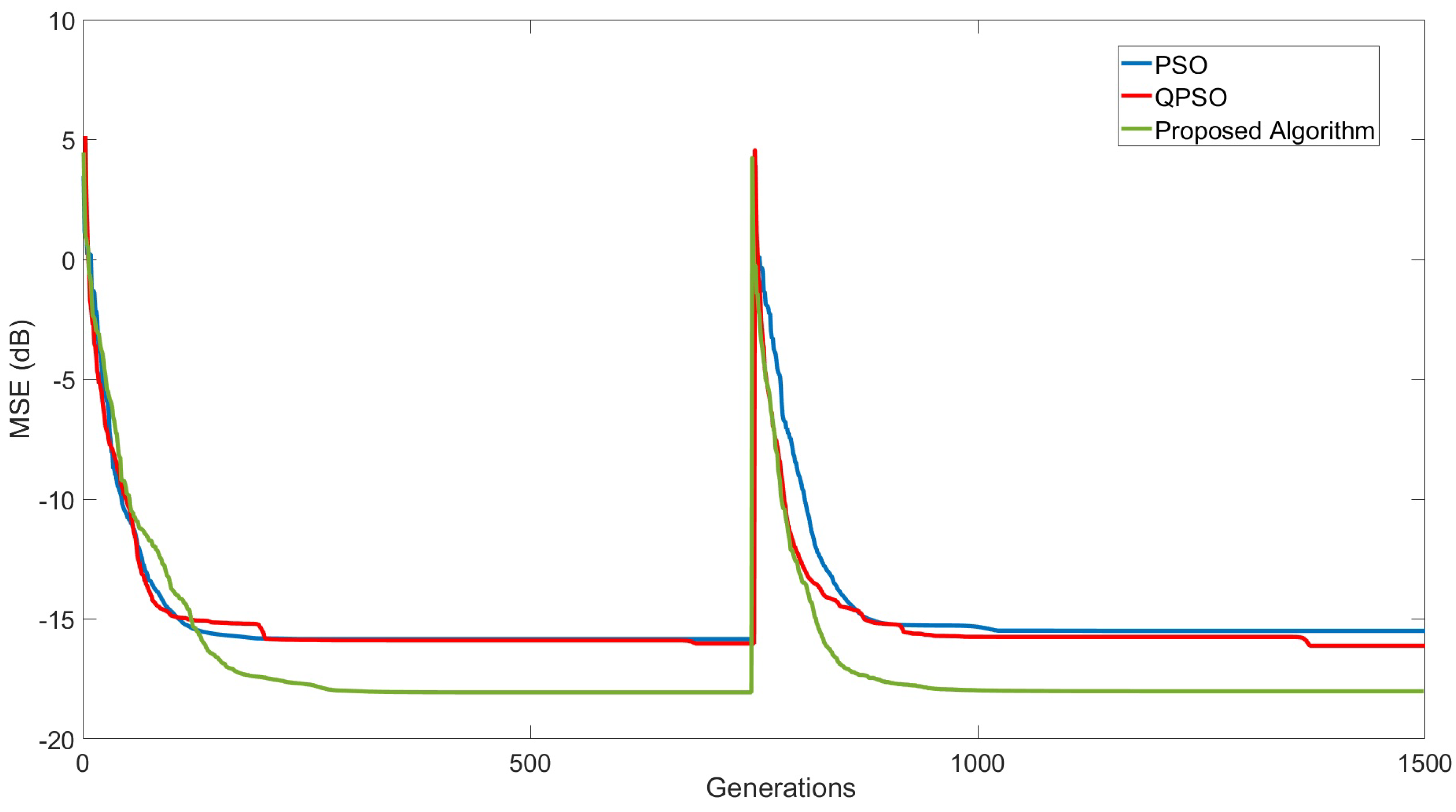
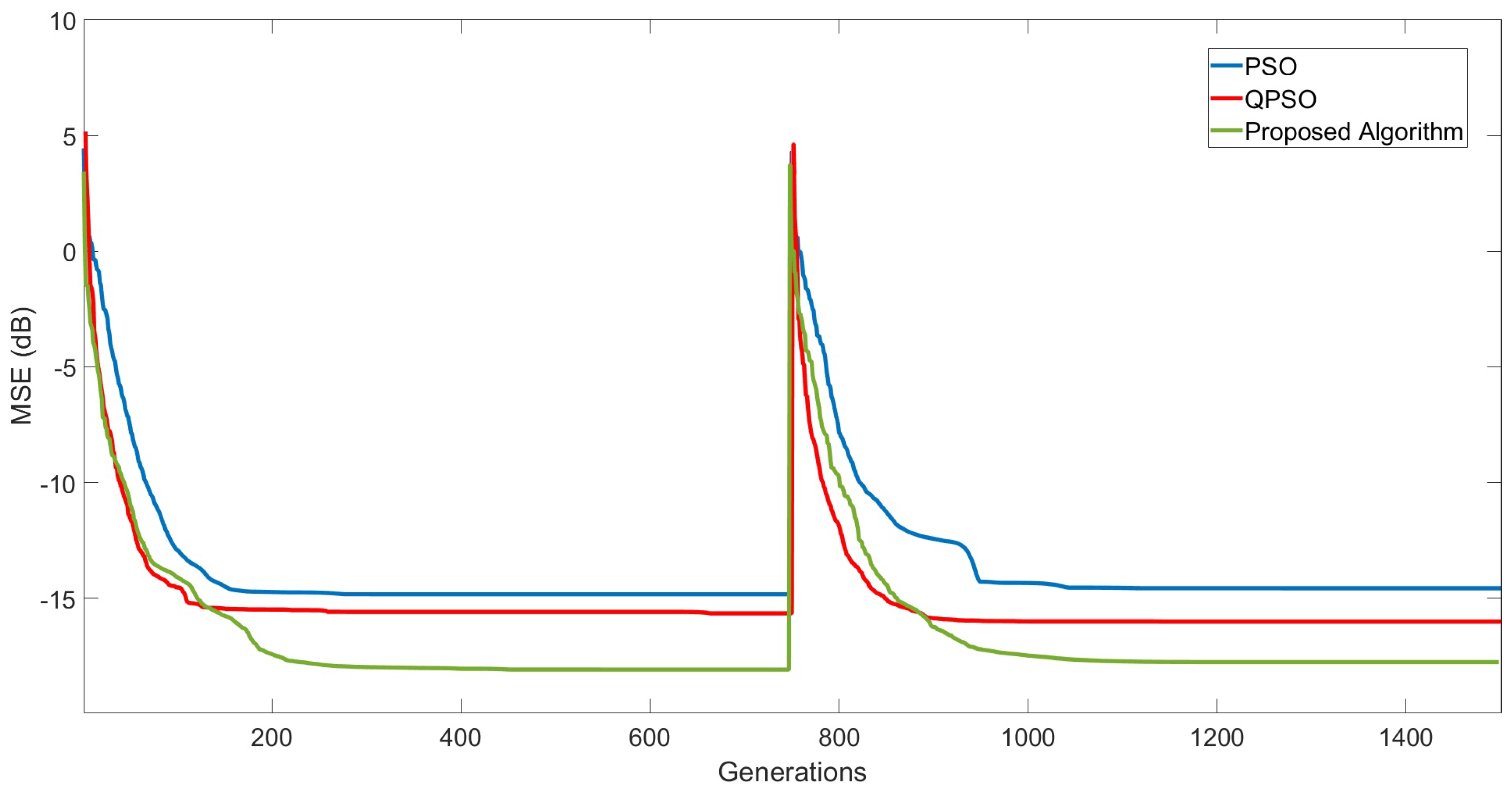
- Comparison between the proposed PSO-based ANC system with switching filter selection and existing approaches. In addition to previous simulations, we simulate the proposed PSO-based ANC system and existing approaches [23,24] to make a consistent comparison between them in terms of the MSE level. Table 2 shows the fixed parameters of the existing approaches, such as acceleration coefficients and inertia weights, which were selected to provide the best performance of these approaches. Here, the primary and secondary path of the proposed PSO-based ANC system and existing approaches were multiplied by −1 at generation 750 to test their tracking behavior, as shown in Figure 8 and Figure 9, respectively. As can be observed, the proposed PSO-based ANC system achieves a higher MSE level when compared with existing approaches. It should be noted that the most recent approach based on quantum-behaved (QPSO-based ANC system) [24] achieves a slight improvement of the MSE level compared with the PSO-based ANC system [23] at the cost of increasing its computational complexity, as shown in Table 3. As can be observed, the proposed PSO-based ANC system with switching filter selection reaches similar convergence speed compared with the QPSO-based ANC system. However, the proposed approach exhibits better MSE-level by expending lower computational cost. On the other hand, we include the FXLMS algorithm in the comparison. Obviously, the FXLMS algorithm exhibits lower computational cost compared with the existing bio-inspired approaches. Nonetheless, the FXLMS algorithm presents the lowest convergence speed.
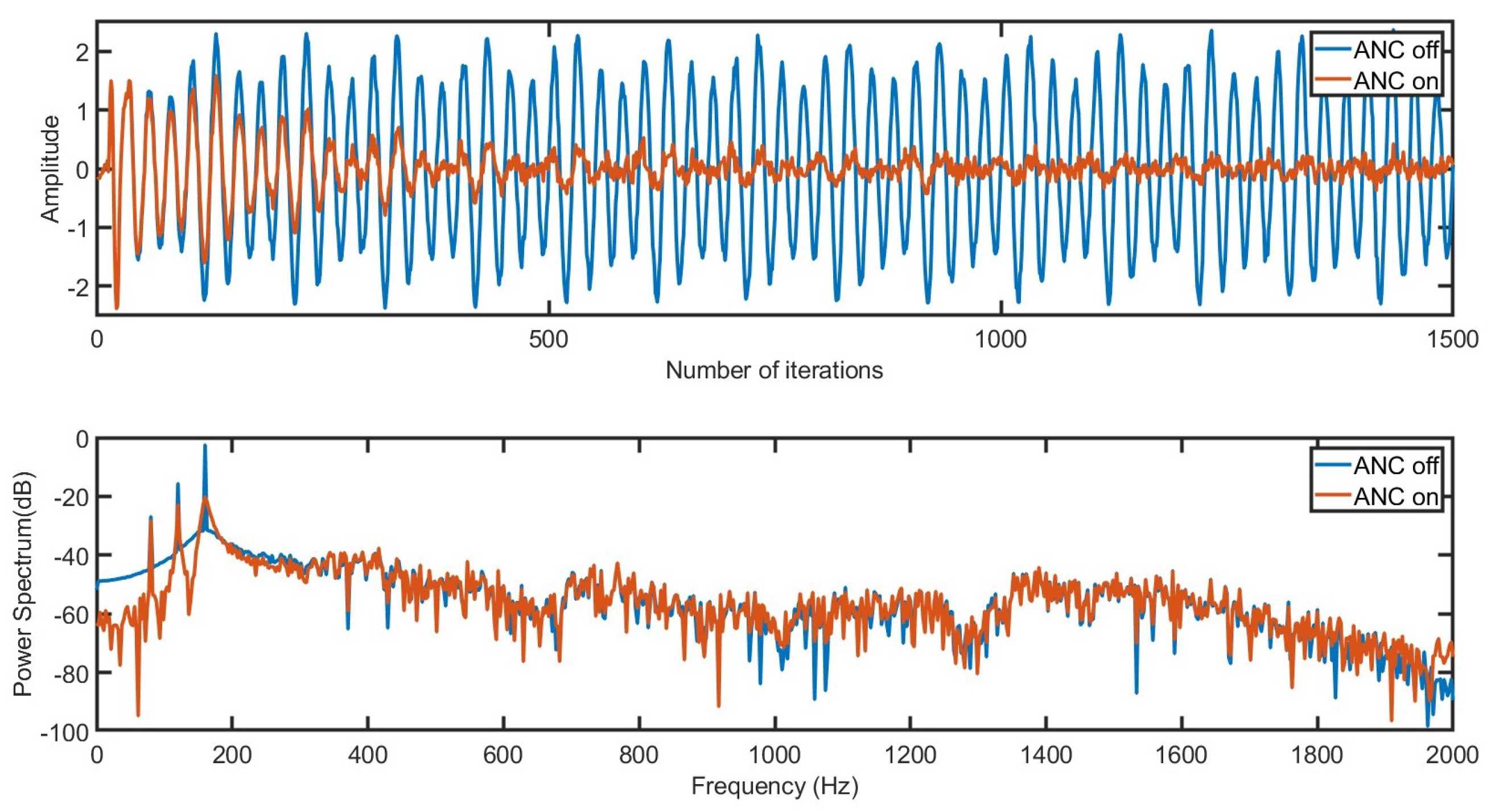
- Power Spectrum analysis. Apart from previous results, we obtained the residual noise at the error microphone by using two different reference signals. Figure 10 depicts the residual noise and the power spectrum when a multi-tonal signal is used as undesired-noise. As can be observed from this figure, if the adaptation process occurs, the noise at the error microphone decreases.
4. Conclusions
- 1.
- We take advantage of the complementary capabilities of two PSO algorithms to improve the MSE level.
- 2.
- We propose a selection criteria to determine which PSO algorihm is used. Therefore, both algorithms are not executed at the same time during the whole adaptive processing. In this way, we intend to decrease the computational cost of the proposed ANC system since two algorithms are used. However, the proposed filtering scheme has a significantly improved steady-state MSE level.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lu, L.; Yin, K.L.; de Lamare, R.C.; Zheng, Z.; Yu, Y.; Yang, X.; Chen, B. A survey on active noise control in the past decade–Part II: Nonlinear systems. Signal Processing 2021, 181, 107929. [Google Scholar] [CrossRef]
- Kajikawa, Y.; Gan, W.S.; Kuo, S.M. Recent advances on active noise control: Open issues and innovative applications. APSIPA Trans. Signal Inf. Processing 2012, 1, e3. [Google Scholar] [CrossRef] [Green Version]
- Kuo, S.M.; Morgan, D.R. Active noise control: A tutorial review. Proc. IEEE 1999, 87, 943–973. [Google Scholar] [CrossRef] [Green Version]
- Belicchi, C.; Opinto, A.; Martalo, M.; Tira, A.; Pinardi, D.; Farina, A.; Ferrari, G. ANC: A Low-Cost Implementation Perspective; SAE International: Warrendale, PA, USA, 2022; No. 2022-01-0967. [Google Scholar]
- Sun, G.; Feng, T.; Li, M.; Lim, T.C. Convergence analysis of FXLMS-based active noise control for repetitive impulses. Appl. Acoust. 2015, 89, 178–187. [Google Scholar] [CrossRef]
- Ryu, K.W.; Hong, C.S.; Jeong, W.B. Active noise control of closed rectangular cavity using the fxlms algorithms. In Proceedings of the Korean Society for Noise and Vibration Engineering Conference, Jeju Island, Korea, 23–25 October 2009; pp. 247–249. [Google Scholar]
- Sanchez, G.; Diaz, C.; Avalos, J.G.; Garcia, L.; Vazquez, A.; Toscano, K.; Sanchez, J.C.; Perez, H. A highly scalable parallel spike-based digital neuromorphic architecture for high-order fir filters using lms adaptive algorithm. Neurocomputing 2019, 330, 425–436. [Google Scholar] [CrossRef]
- Vazquez, A.A.; Avalos, J.G.; Sanchez, G.; Sanchez, J.C.; Perez, H. A Comparative Survey of Convex Combination of Adaptive Filters. IETE J. Res. 2020, 1–11. [Google Scholar] [CrossRef]
- Vázquez, A.; Pichardo, E.; Avalos, J.G.; Sánchez, G.; Martínez, H.M.; Sánchez, J.C.; Pérez, H.M. Multichannel active noise control based on filtered-x affine projection-like and LMS algorithms with switching filter selection. Appl. Sci. 2019, 9, 4669. [Google Scholar] [CrossRef] [Green Version]
- Song, P.; Zhao, H. Filtered-x generalized mixed norm (FXGMN) algorithm for active noise control. Mech. Syst. Signal Processing 2018, 107, 93–104. [Google Scholar] [CrossRef]
- Song, P.; Zhao, H. Filtered-x least mean square/fourth (FXLMS/F) algorithm for active noise control. Mech. Syst. Signal Processing 2019, 120, 69–82. [Google Scholar] [CrossRef]
- Al Omour, A.M.; Zidouri, A.; Iqbal, N.; Zerguine, A. Filtered-x least mean fourth (FXLMF) and leaky FXLMF adaptive algorithms. EURASIP J. Adv. Signal Processing 2016, 2016, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Ferrer, M.; Gonzalez, A.; de Diego, M.; Pinero, G. Convex combination filtered-x algorithms for active noise control systems. IEEE Trans. Audio Speech Lang. Processing 2012, 21, 156–167. [Google Scholar] [CrossRef] [Green Version]
- Ardekani, I.T.; Abdulla, W.H. Effects of imperfect secondary path modeling on adaptive active noise control systems. IEEE Trans. Audio Speech Lang. Processing 2011, 20, 1252–1262. [Google Scholar] [CrossRef]
- Tobias, O.J.; Bermudez, J.C.M.; Bershad, N.J. Mean weight behavior of the filtered-x LMS algorithm. IEEE Trans. Signal Processing 2000, 48, 1061–1075. [Google Scholar] [CrossRef]
- Saito, N.; Sone, T. Influence of modeling error on noise reduction performance of active noise control systems using filtered-x LMS algorithm. J. Acoust. Soc. Jpn. 1996, 17, 195–202. [Google Scholar] [CrossRef] [Green Version]
- Snyder, S.D.; Hansen, C.H. The effect of transfer function estimation errors on the filtered-x LMS algorithm. IEEE Trans. Signal Processing 1994, 42, 950–953. [Google Scholar] [CrossRef]
- Yim, K.H.; Kim, J.B.; Lee, T.P.; Ahn, D.S. Genetic adaptive iir filtering algorithm for active noise control. In Proceedings of the IEEE International Fuzzy Systems, Seoul, Korea, 22–25 August 1999; Volume 3, pp. 1723–1728. [Google Scholar]
- Janjanam, L.; Saha, S.K.; Kar, R.; Mandal, D. An efficient identification approach for highly complex non-linear systems using the evolutionary computing method based Kalman filter. AEU-Int. J. Electron. Commun. 2021, 138, 153890. [Google Scholar] [CrossRef]
- Russo, F.; Sicuranza, G.L. Accuracy and performance evaluation in the genetic optimization of nonlinear systems for active noise control. IEEE Trans. Instrum. Meas. 2007, 56, 1443–1450. [Google Scholar] [CrossRef]
- Russo, F.; Sicuranza, G.L. Genetic optimization in nonlinear systems for active noise control: Accuracy and performance evaluation. In Proceedings of the 2006 IEEE Instrumentation and Measurement Technology Conference Proceedings, Sorrento, Italy, 24–27 April 2006; pp. 1512–1517. [Google Scholar]
- Chang, C.Y.; Chen, D.R. Active noise cancellation without secondary path identification by using an adaptive genetic algorithm. IEEE Trans. Instrum. Meas. 2010, 59, 2315–2327. [Google Scholar] [CrossRef]
- Rout, N.K.; Das, D.P.; Panda, G. Particle swarm optimization based active noise control algorithm without secondary path identification. IEEE Trans. Instrum. Meas. 2012, 61, 554–563. [Google Scholar] [CrossRef]
- Yu, N.; Li, Z.; Wu, Y.; Feng, R. Quantum-behaved particle swarm optimization-based active noise control system with timing varying path. J. Low Freq. Noise Vib. Act. Control. 2020, 40, 524–539. [Google Scholar] [CrossRef] [Green Version]
- George, N.V.; Panda, G. A particle-swarm-optimization-based decentralized nonlinear active noise control system. IEEE Trans. Instrum. Meas. 2012, 61, 3378–3386. [Google Scholar] [CrossRef]
- George, N.V.; Panda, G. A robust evolutionary feedforward active noise control system using wilcoxon norm and particle swarm optimization algorithm. IEEE Expert Syst. Appl. 2012, 39, 7574–7580. [Google Scholar] [CrossRef]
- Rout, N.K.; Das, D.P.; Panda, G. Particle swarm optimization based non- linear active noise control under saturation nonlinearity. Appl. Soft Comput. 2016, 41, 275–289. [Google Scholar] [CrossRef]
- Porghoveh, M.; Heidari Shirazi, K.; Messia, A.; Yildizdag, M.E. A PSO-based computational framework to design active noise cancelation systems for smart vehicle enclosures. Math. Mech. Solids 2022, 10812865221089376. [Google Scholar] [CrossRef]
- Clerc, M.; Kennedy, J. The particle swarm-explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Trelea, I.C. The particle swarm optimization algorithm: Convergence analysis and parameter selection. Inf. Processing Lett. 2003, 85, 317–325. [Google Scholar] [CrossRef]
- Van den Bergh, F.; Engelbrecht, A.P. A study of particle swarm optimization particle trajectories. Inf. Sci. 2006, 176, 937–971. [Google Scholar] [CrossRef]
- Arani, B.O.; Mirzabeygi, P.; Panahi, M.S. An improved PSO algorithm with a territorial diversity-preserving scheme and enhanced exploration–exploitation balance. Swarm Evol. Comput. 2013, 11, 1–15. [Google Scholar] [CrossRef]
- Kuo, S.M.; Morgan, D.R. Active Noise Control Systems; Wiley: New York, NY, USA, 1996; pp. 17–199. [Google Scholar]
- Engelbrecht, A.P. Computational Intelligence: An Introduction; John Wiley & Sons: Hoboken, NJ, USA, 2007. [Google Scholar]
- Burgess, J.C. Active adaptive sound control in a duct: A computer simulation. J. Acoust. Soc. Am. 1981, 70, 715–726. [Google Scholar] [CrossRef]
- Sanchez, G.; Avalos, J.G.; Vazquez, A.; Garcia, L.; Frias, T.; Toscano, K.; Perez, H. A compact neuromorphic architecture with dynamic routing to efficiently simulate the FXECAP-L algorithm for real-time active noise control. Appl. Soft Comput. 2020, 91, 106233. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 1.0599 | 1.0599 | 1.0993 | 1.0993 | 0.79 | 0.0009 | 0.9449 | 0.01649 |
| Approach | Algorithm | ||||
|---|---|---|---|---|---|
| Rout et al. [23] | PSO | 1 | 1 | 0.0009 | 0.79 |
| Yu et al. [24] | QPSO | 1.5 | 1.5 | 0.5 | 1 |
| Approach | Algorithm | Additions | Multiplications | Logarithms |
|---|---|---|---|---|
| Adapted from Burgess et al. [35] | FXLMS | −1 | 0 | |
| Adapted from Rout et al. [23] | PSO | 0 | ||
| Adapted from Yu et al. [24] | QPSO | N | ||
| This work | PSO | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pichardo, E.; Anides, E.; Vazquez, A.; Vazquez, E.; Sánchez, J.C.; Pérez, H.M.; Sánchez, G.; Avalos, J.G.; Sánchez, G. A Novel PSO-Based Adaptive Filter Structure with Switching Selection Criteria for Active Noise Control. Appl. Sci. 2022, 12, 4368. https://doi.org/10.3390/app12094368
Pichardo E, Anides E, Vazquez A, Vazquez E, Sánchez JC, Pérez HM, Sánchez G, Avalos JG, Sánchez G. A Novel PSO-Based Adaptive Filter Structure with Switching Selection Criteria for Active Noise Control. Applied Sciences. 2022; 12(9):4368. https://doi.org/10.3390/app12094368
Chicago/Turabian StylePichardo, Eduardo, Esteban Anides, Angel Vazquez, Eduardo Vazquez, Juan C. Sánchez, Héctor M. Pérez, Gabriel Sánchez, Juan G. Avalos, and Giovanny Sánchez. 2022. "A Novel PSO-Based Adaptive Filter Structure with Switching Selection Criteria for Active Noise Control" Applied Sciences 12, no. 9: 4368. https://doi.org/10.3390/app12094368
APA StylePichardo, E., Anides, E., Vazquez, A., Vazquez, E., Sánchez, J. C., Pérez, H. M., Sánchez, G., Avalos, J. G., & Sánchez, G. (2022). A Novel PSO-Based Adaptive Filter Structure with Switching Selection Criteria for Active Noise Control. Applied Sciences, 12(9), 4368. https://doi.org/10.3390/app12094368