
Study of Variable Thickness Magnetorheological Transmission Performance of Electrothermal Shape Memory Alloy Squeeze


Abstract
:1. Introduction
2. Materials and Methods
2.1. Working Principles of Variable Thickness MRF Transmission Device
- (1)
- Under the initial condition, when the coil is not energized, the MRF is in zero-field state, and the input shaft cannot drive the output shaft to rotate only by the shear stress generated by the MRF zero-field viscosity during the rotation.
- (2)
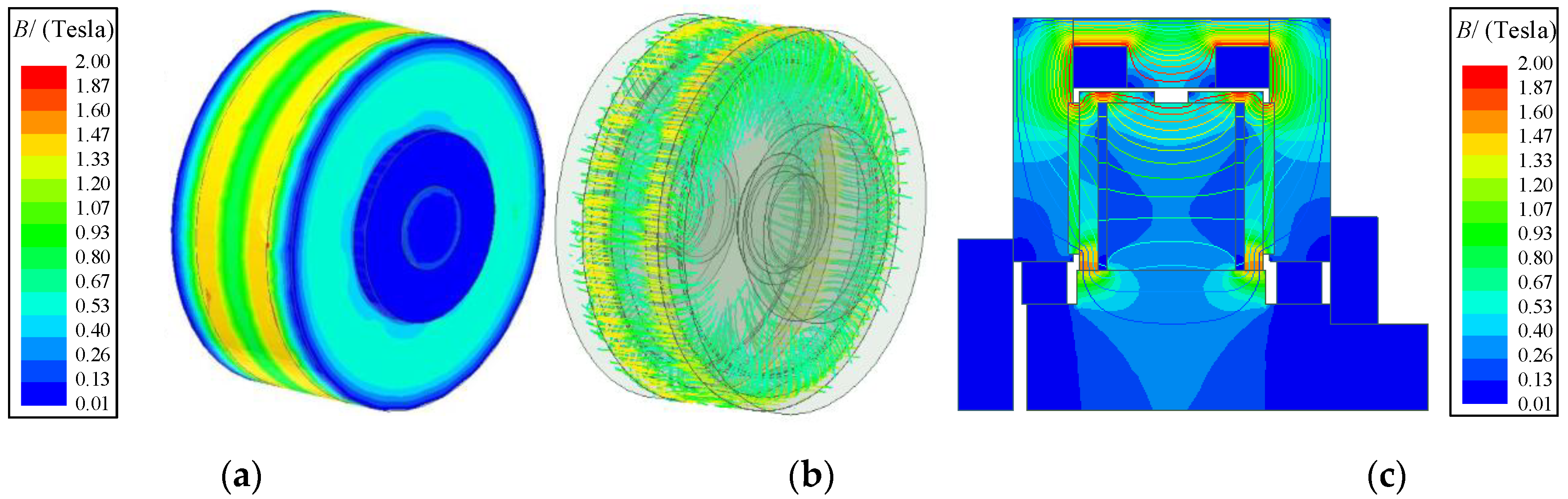
- When the transmission device starts to function, the excitation coil is energized to generate a magnetic field, the magnetic particles in the MRF are arranged in a chain along the magnetic flux direction, the shear yield stress is significantly enhanced, and the output shaft is rotated by this shear yield stress; furthermore, as the coil current increases, the transmission torque of the device can be further increased.
- (3)
- To further increase the torque of the MRF transmission device, by loading the electrothermal SMA spring with current, the Joule heat generated by the current generates a shape memory effect in the SMA, and the force or displacement generated by the electrothermal SMA drives the squeeze disc to gradually start squeezing the MRF working gap thickness from 1.5 mm, and the axial squeeze increases the MRF shear yield stress exponentially. As a result, the transmission torque of the MRF transmission device is further increased.
- (4)
- At the end of the operation, the excitation coil is de-energized and the MRF is restored to a Newtonian fluid upon the disappearance of the magnetic field by the viscoplastic body, and the electrothermal SMA spring gradually regains its original length as the temperature drops, and the output shaft of the drive stops rotating.
2.2. Structural Dimensional Design of the Transmission
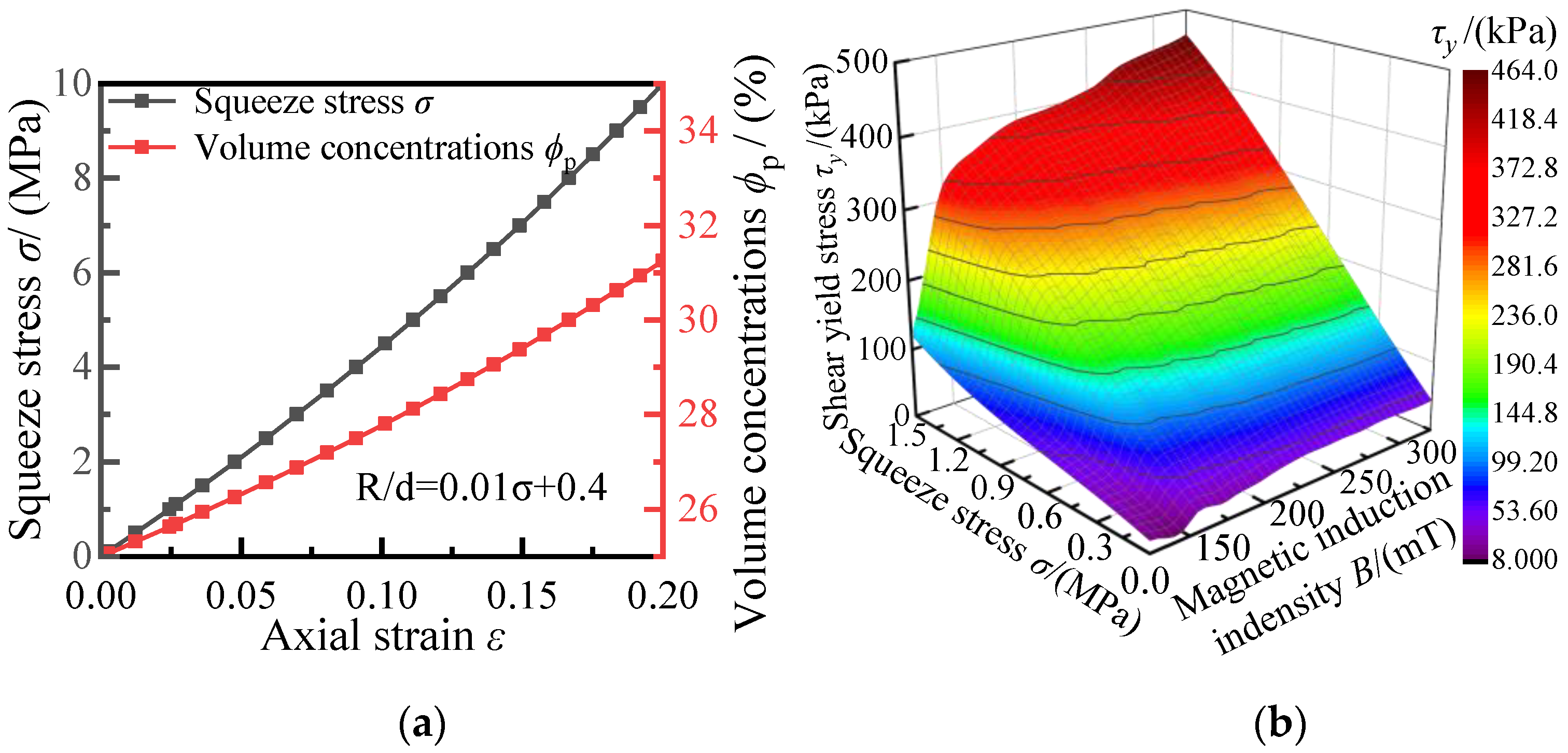
2.3. Squeeze Strengthening Effect of the MRF
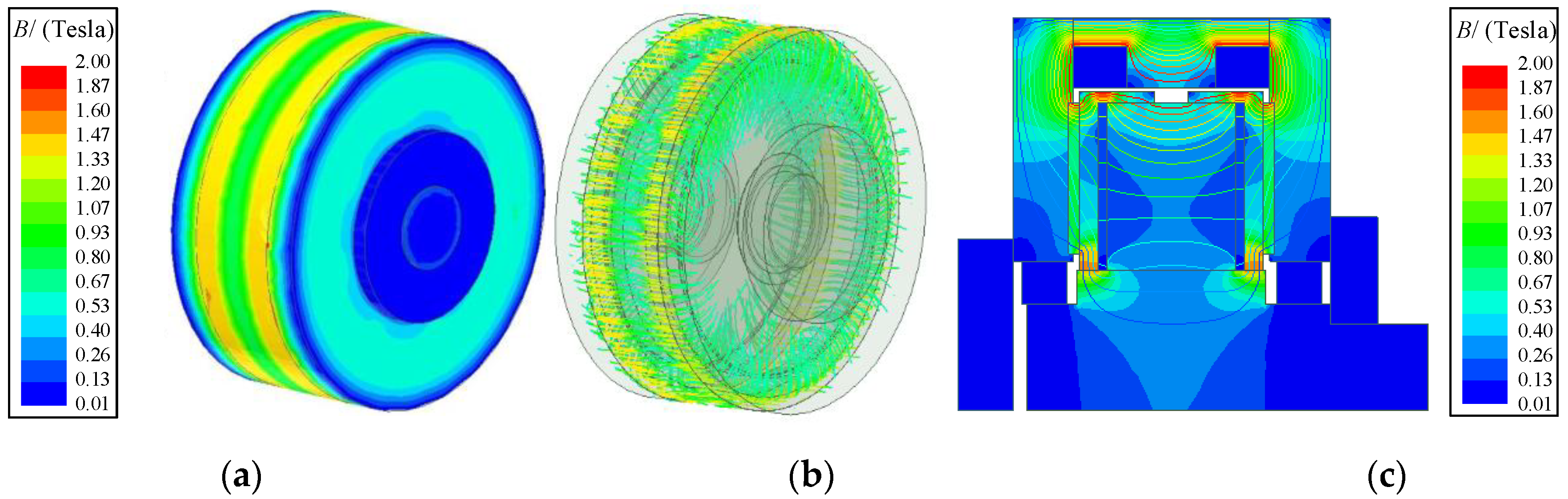
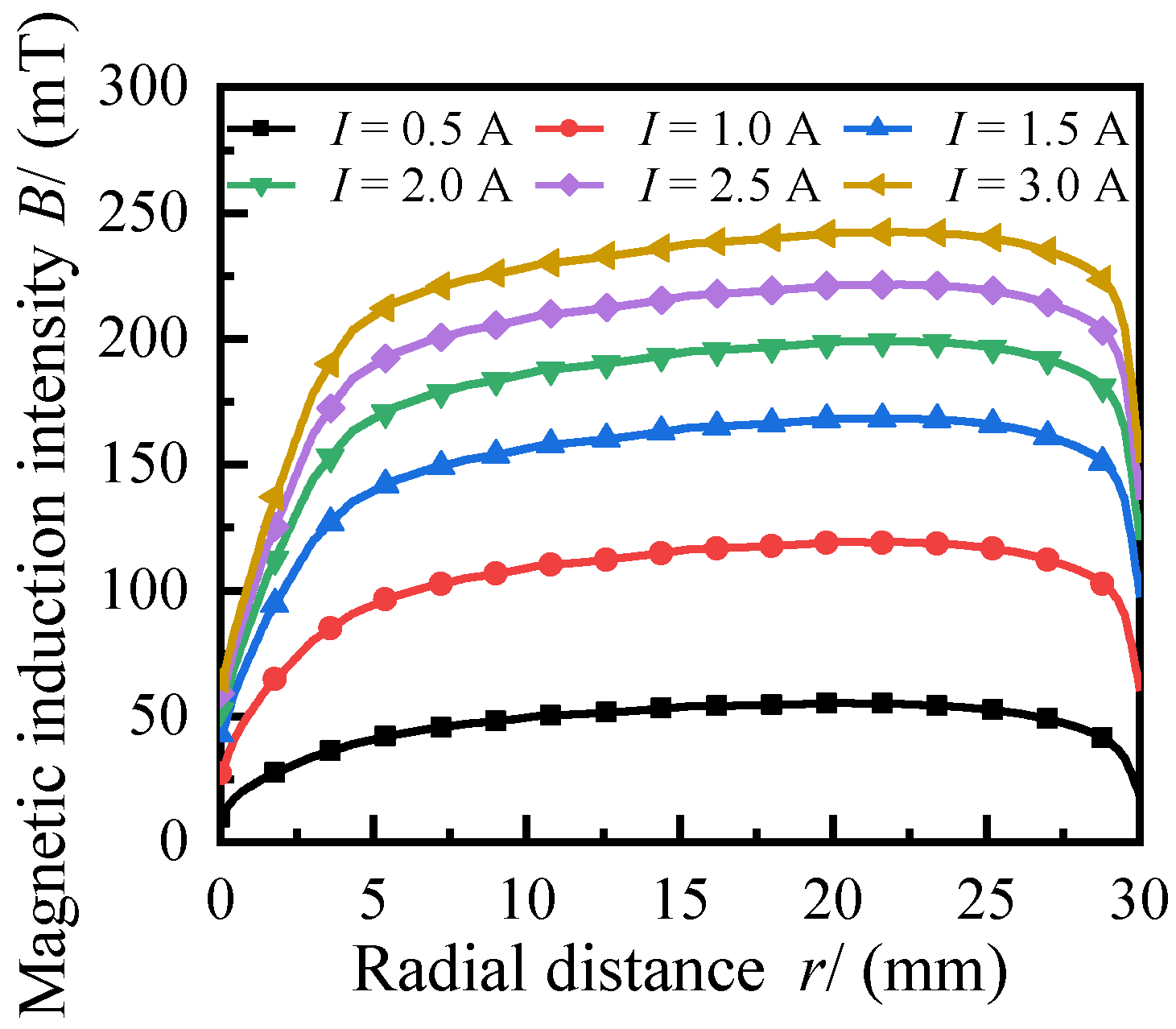
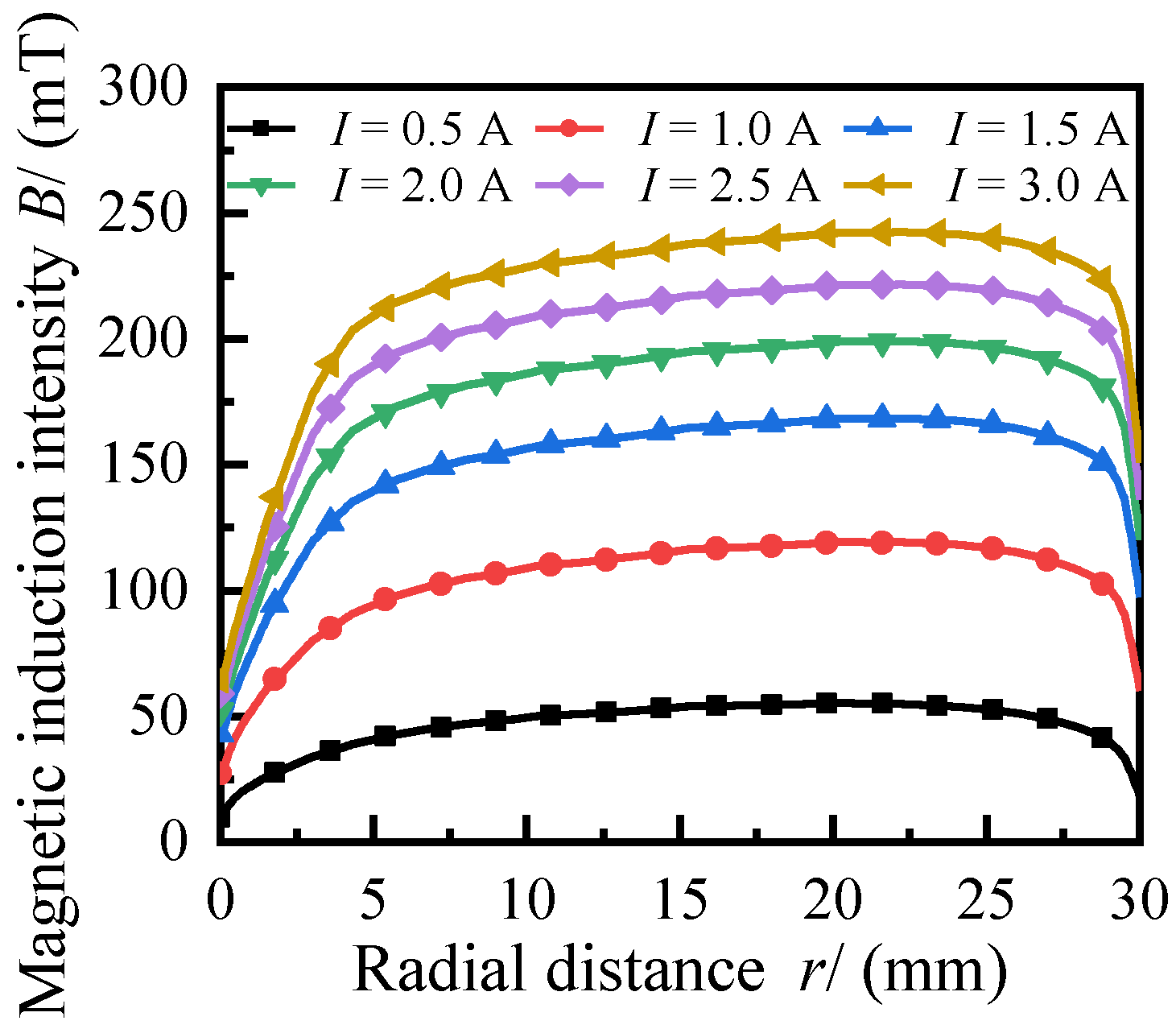
2.4. Magnetic Field Finite Element Simulation
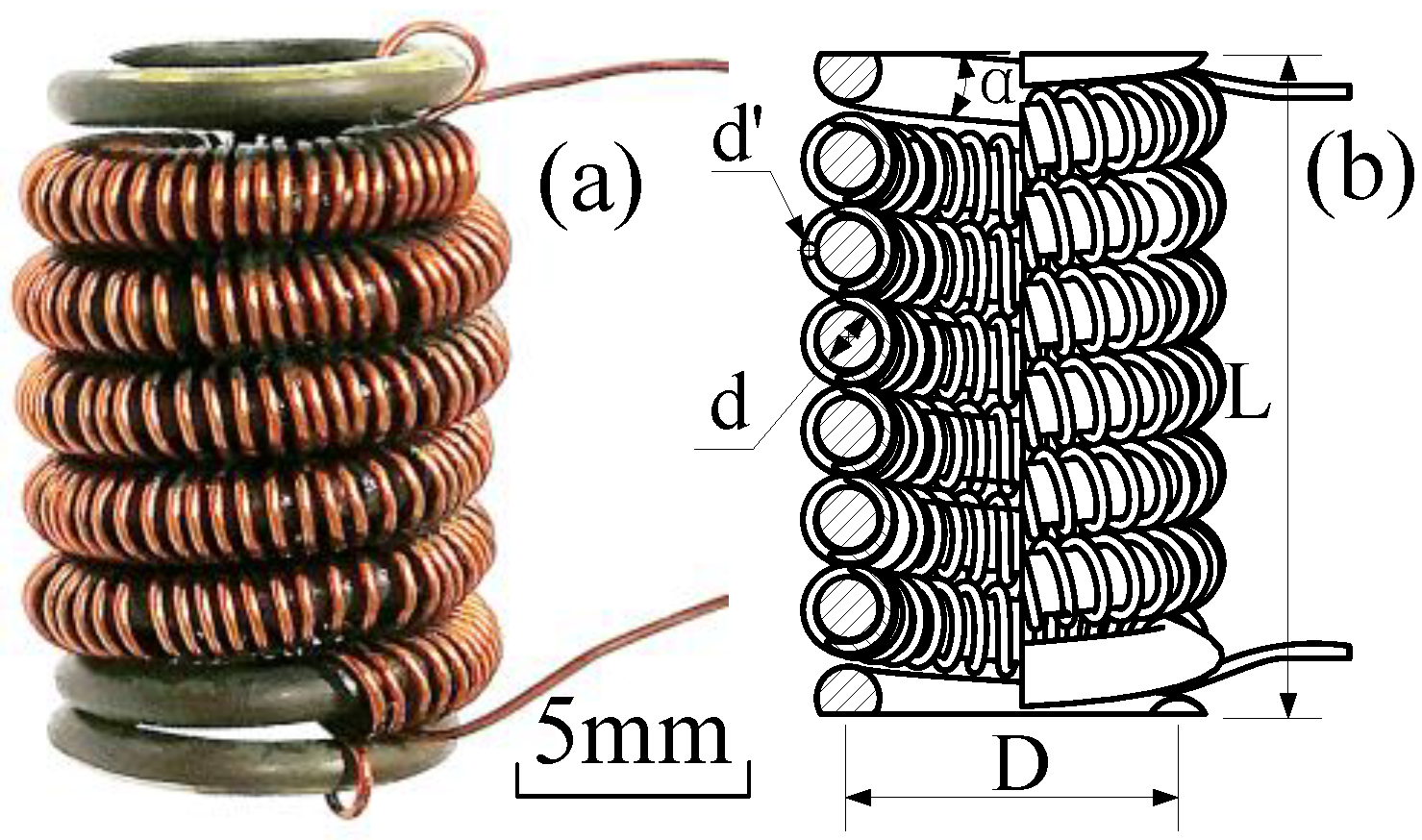
2.5. Electrothermal SMA Spring Drive Characteristics
3. Analysis of MR Transmission Device Torque
3.1. Pressurization Process of Electrothermal SMA
3.2. Quantitative Calculation of Transmission Performance
4. Discussion
5. Conclusions
- (1)
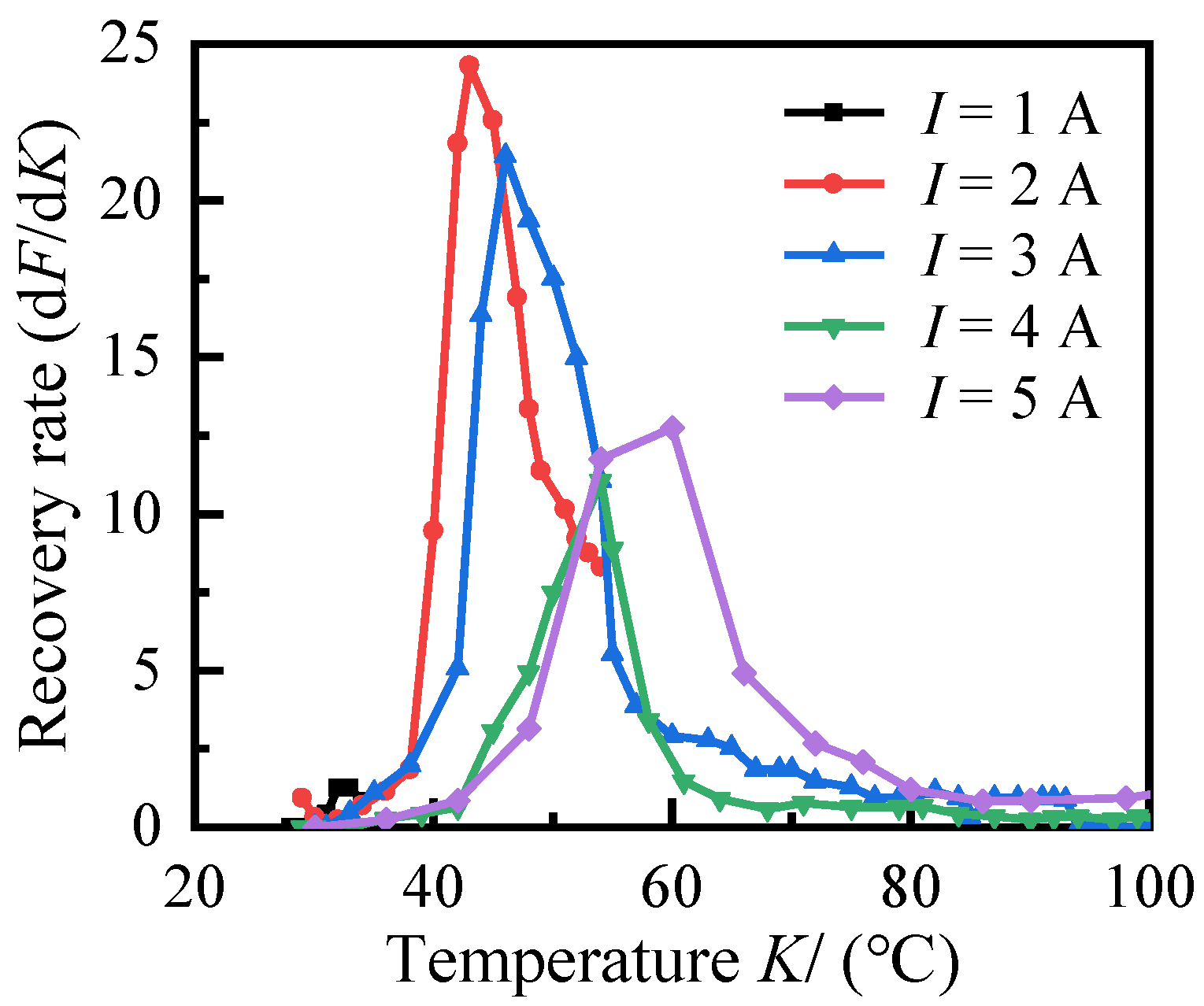
- The output squeeze force of the SMA spring showed a high degree of nonlinearity during the temperature rise, with a maximum squeeze force of 318.43 N. When the current of the electrothermal SMA spring was 3 A, the highest heating temperature of the spring could reach the end of austenite phase transformation temperature. The current size affects the phase transformation process of the SMA to some extent, resulting in differences in the growth trajectory of the spring’s restoring force.
- (2)
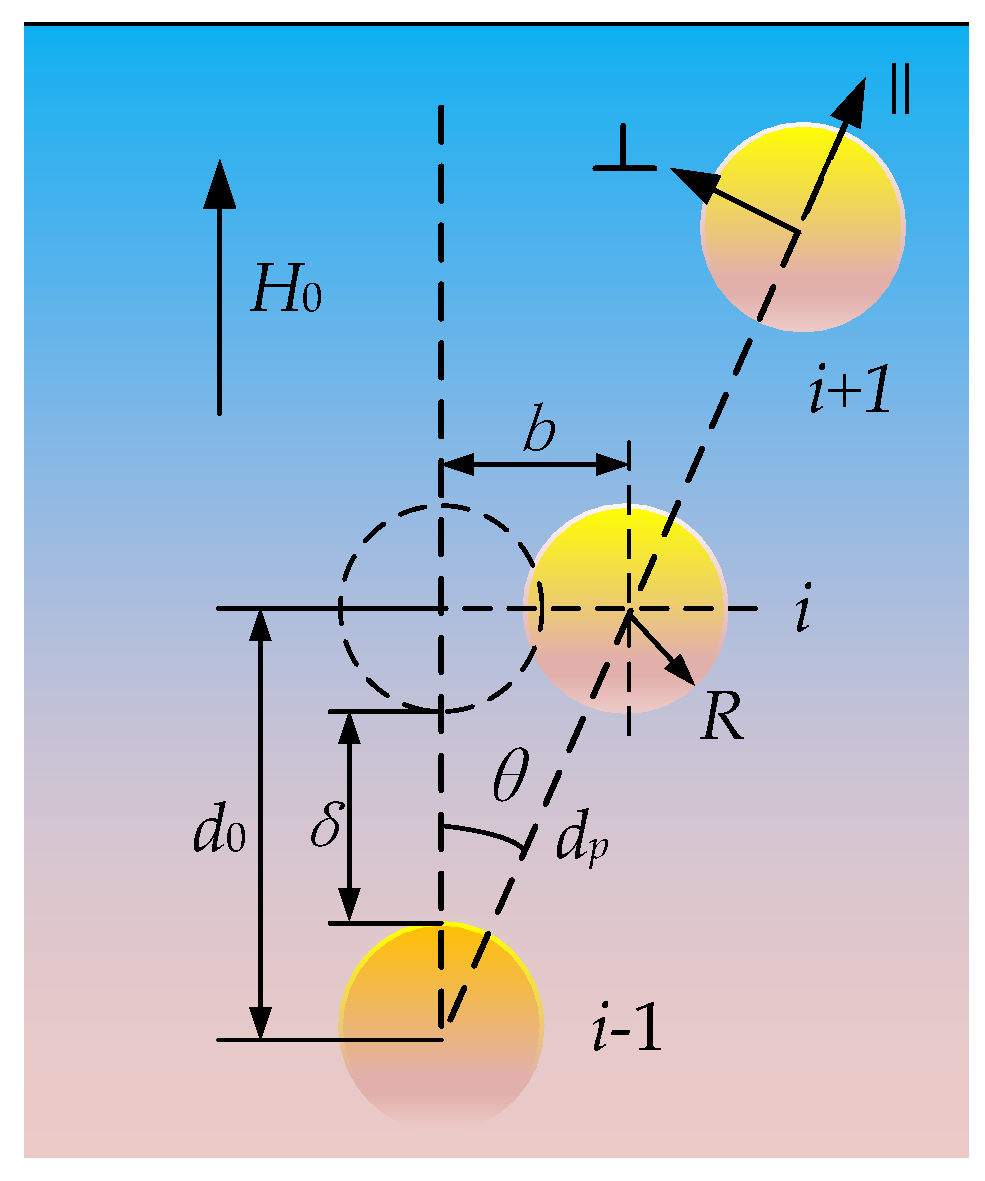
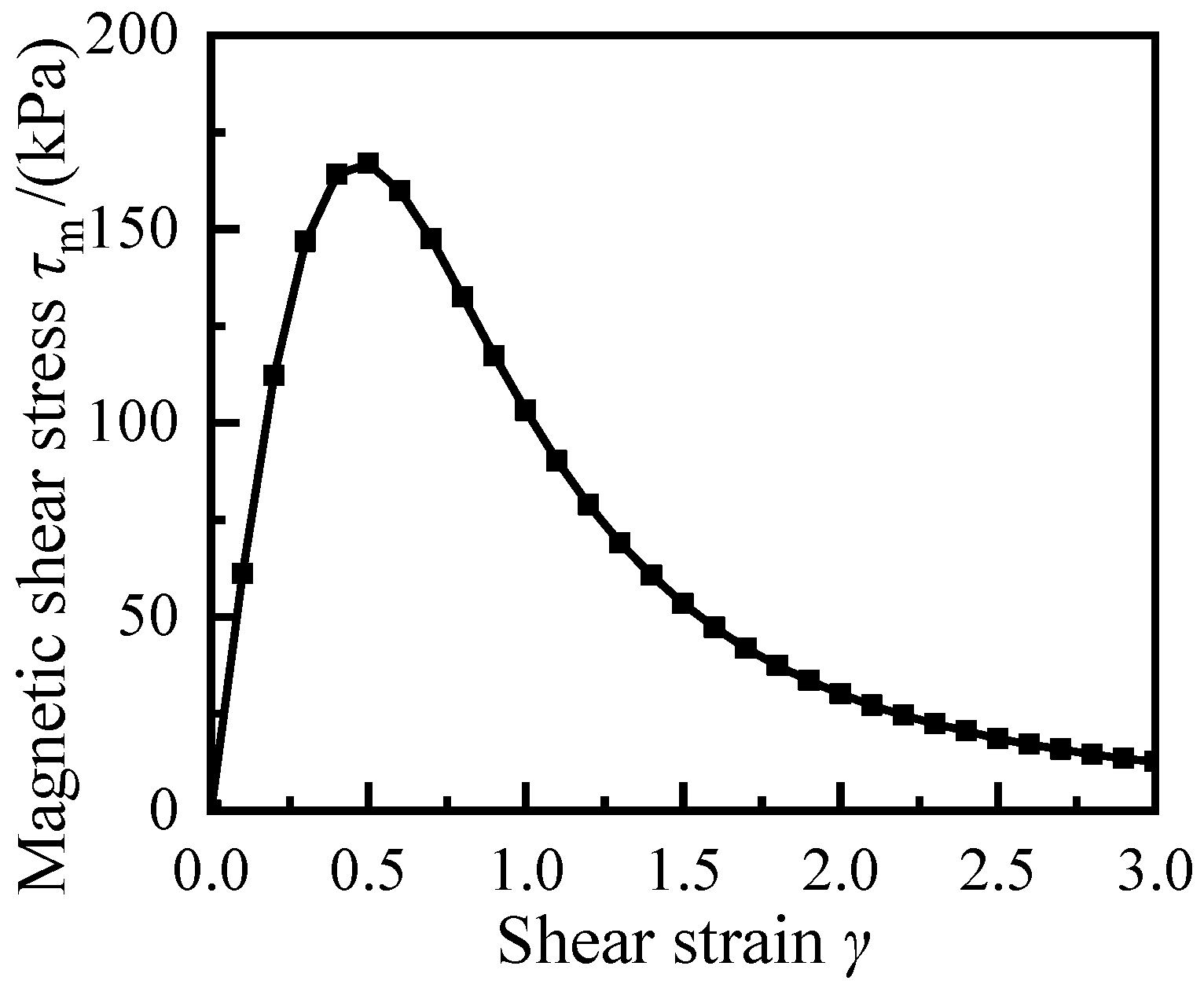
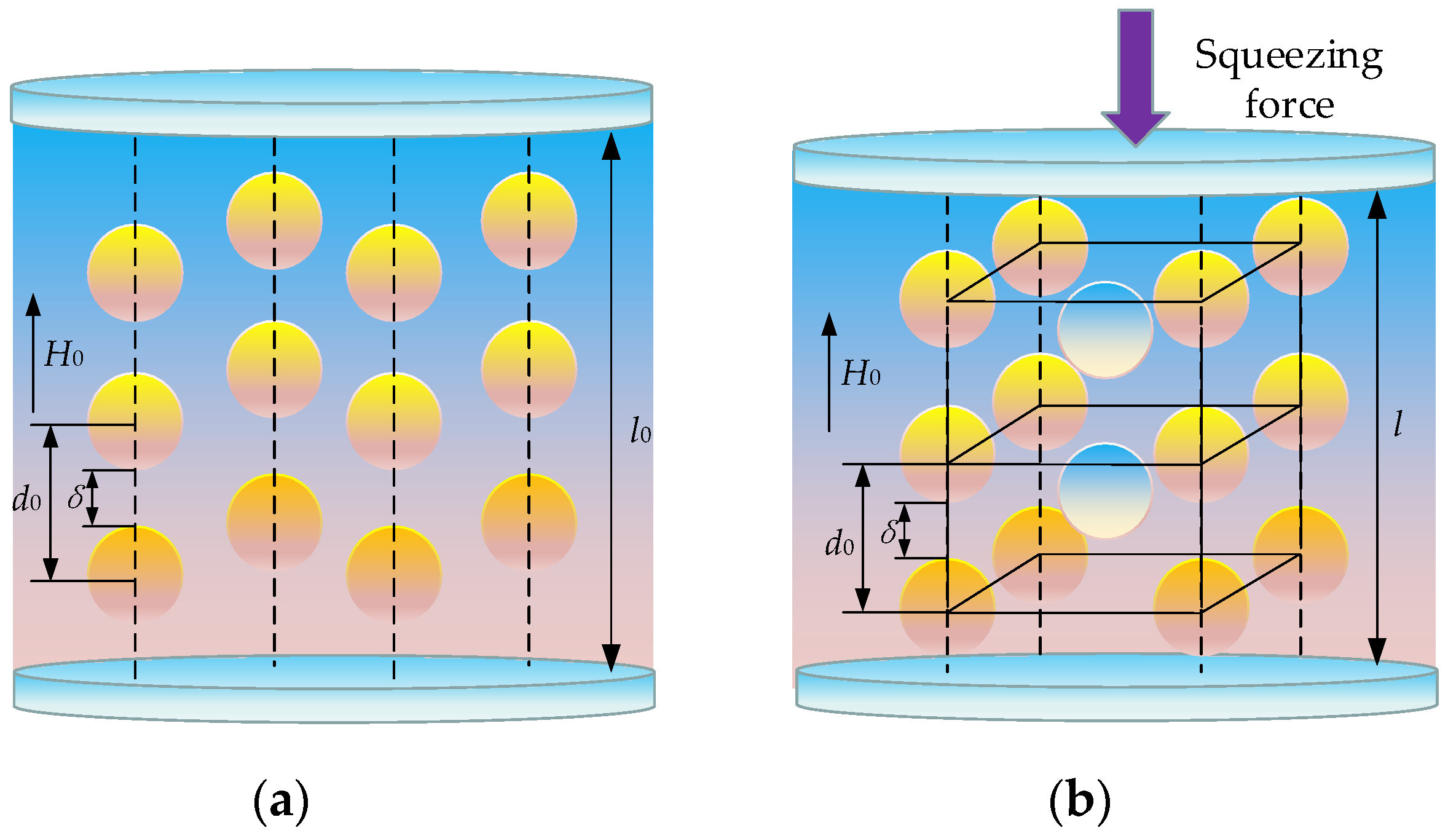
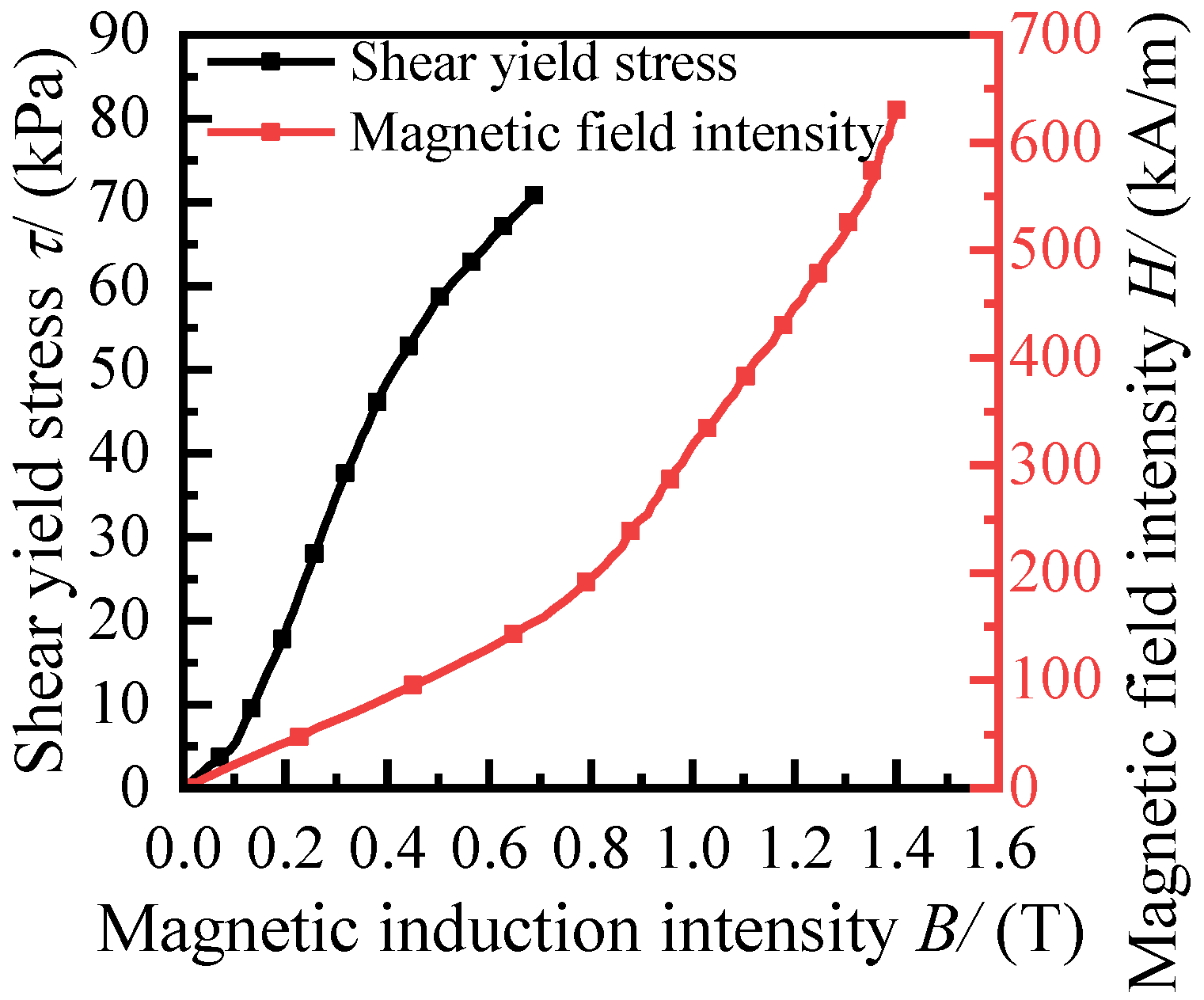
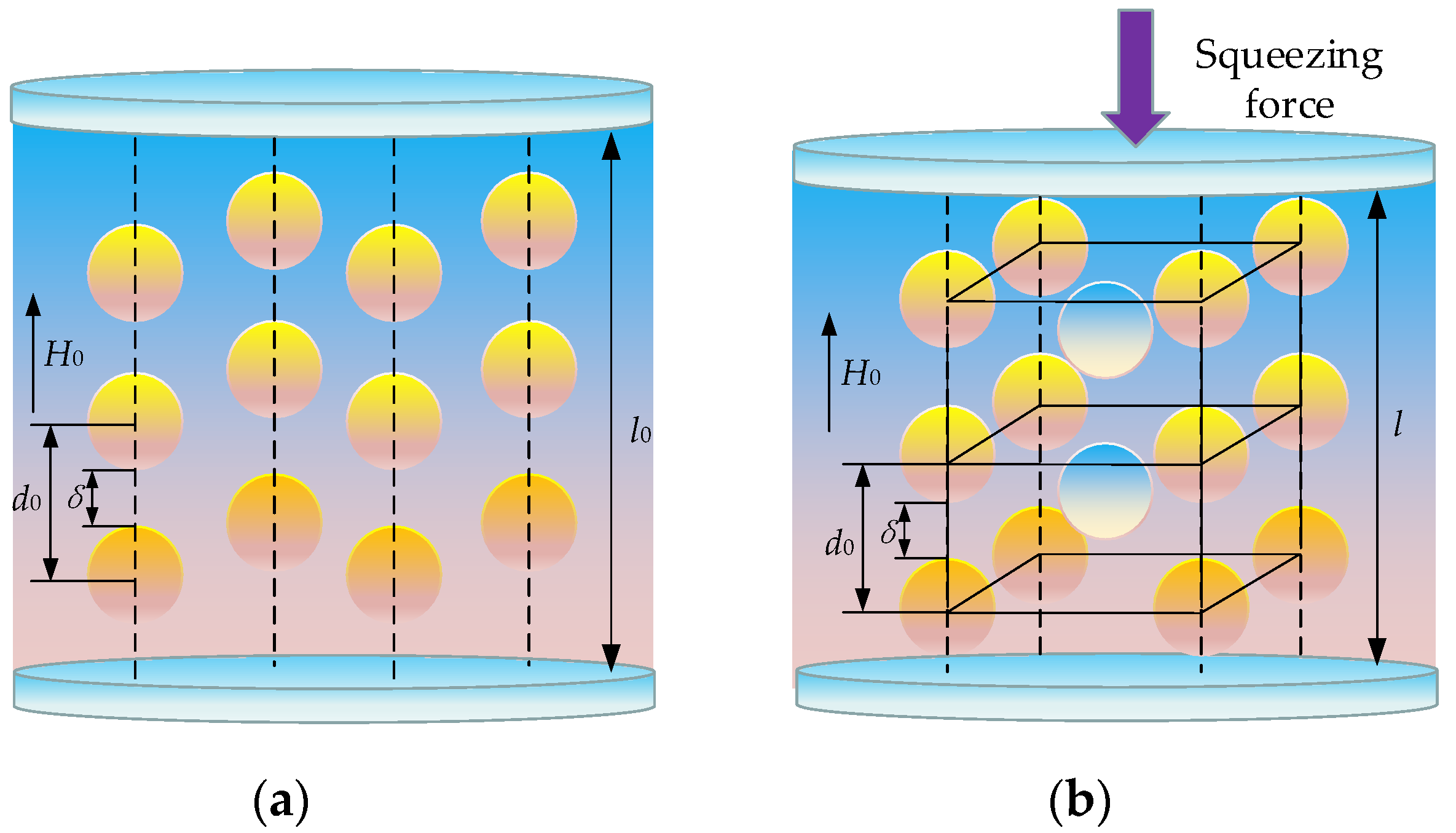
- Thickness variation had a small effect on the integral number of MRF, but excessive shear deformation leading to magnetic chain breakage was the main factor affecting the performance failure of MRF. The shear stress under squeeze conditions was mainly composed of two parts: magnetic shear stress of dipole and friction stress between particles. When the MRF was axially pressurized, the magnetic chain gradually changed from a single-chain model to a body-centered cubic model, along with the reduction of the particle gap. The squeeze strengthening effect of MRF is related to the magnetic induction strength and squeezing pressure. When the squeezing pressure is fixed, the higher the magnetic induction strength, and the more significant the strengthening effect.
- (3)
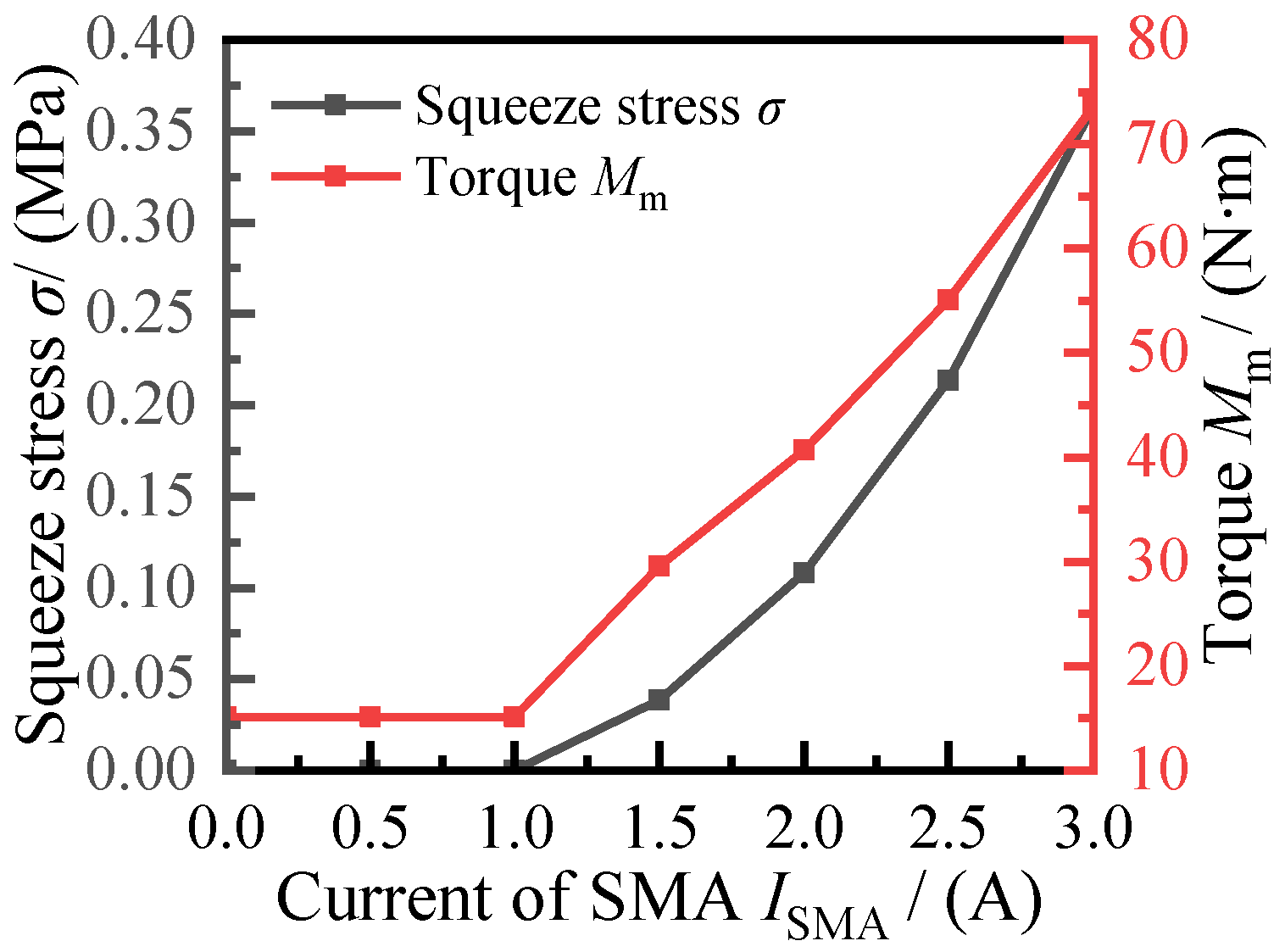
- The torque of MR transmission device showed an approximately linear increase with the increase of the spring current, and the maximum MRF torque was 73.56 N∙m at the current of 3.0 A and the squeeze stress of 0.34 MPa, and the performance of MRF was enhanced by 4.88 times after squeeze strengthening.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Spaggiari, A.; Castagnetti, D.; Golinelli, N.; Dragoni, E.; Mammano, G.S. Smart materials: Properties, design and mechatronic applications. Proc. Inst. Mech. Eng. L J. Mater. Des. Appl. 2016, 233, 734–762. [Google Scholar] [CrossRef]
- Hua, D.; Liu, X.; Li, Z.; Fracz, P.; Hnydiuk-Stefan, A.; Li, Z. A Review on Structural Configurations of Magnetorheological Fluid Based Devices Reported in 2018–2020. Front. Mater. 2021, 8, 640102. [Google Scholar] [CrossRef]
- Yu, J.; Dong, X.; Su, X.; Tao, X.; Li, X. Design and testing of a semi-active inerter with magneto-rheological fluid valve. Smart Mater. Struct. 2021, 30, 105035. [Google Scholar] [CrossRef]
- Jani, J.M.; Leary, M.; Subic, A.; Gibson, M.A. A review of shape memory alloy research, applications and opportunities. Mater. Des. 2014, 56, 1078–1113. [Google Scholar] [CrossRef]
- Zhou, B.; Kang, Z.; Wang, Z.; Xue, S. Finite Element Method on Shape Memory Alloy Structure and Its Applications. Chin. J. Mech. Eng. 2019, 32, 135–145. [Google Scholar] [CrossRef] [Green Version]
- Spaggiari, A.; Dragoni, E. Combined squeeze-shear properties of magnetorheological fluids: Effect of pressure. J. Intell. Mater. Syst. Struct. 2014, 25, 1041–1053. [Google Scholar] [CrossRef]
- Huang, J.; Zhang, J.Q.; Yang, Y.; Wei, Y.Q. Analysis and design of a cylindrical magneto-rheological fluid brake. J. Mater. Process. Technol. 2002, 129, 559–562. [Google Scholar] [CrossRef]
- Qin, H.; Song, A.; Zeng, X.; Hu, S. Design and evaluation of a small-scale multi-drum magnetorheological brake. J. Intell. Mater. Syst. 2018, 29, 2607–2618. [Google Scholar] [CrossRef]
- Karakoc, K.; Park, E.J.; Suleman, A. Design considerations for an automotive magnetorheological brake. Mechatronics 2008, 18, 434–447. [Google Scholar] [CrossRef]
- Dai, S.Q.; Du, C.B.; Yu, G.J. Design, testing and analysis of a novel composite magnetorheological fluid clutch. J. Intell. Mater. Syst. Struct. 2013, 24, 1675–1682. [Google Scholar] [CrossRef]
- Wang, H.Y.; Bi, C. Study of a magnetorheological brake under compression-shear mode. Smart Mater. Struct. 2020, 29, 14. [Google Scholar] [CrossRef]
- Hegger, C.; Maas, J. Investigation of the squeeze strengthening effect in shear mode. J. Intell. Mater. Syst. Struct. 2016, 27, 1895–1907. [Google Scholar] [CrossRef]
- Stachowiak, D.; Kurzawa, M. A computational and experimental study of shape memory alloy spring actuator. Prz. Elektrotechniczn 2019, 95, 29–32. [Google Scholar] [CrossRef]
- Hwang, D.; Higuchi, T. A Rotary Actuator Using Shape Memory Alloy (SMA) Wires. IEEE/ASME Trans. Mechatron. 2014, 19, 1625–1635. [Google Scholar] [CrossRef]
- Andronov, I.N.; Demina, M.Y.; Polugrudova, L.S. Method for Designing Springs Using Materials with Shape Memory as the Actuators of Power Units. J. Mach. Manuf. Rellab. 2018, 47, 196–204. [Google Scholar] [CrossRef]
- Chen, W.J.; Huang, J.; Yang, Y. Research on the Transmission Performance of a High-Temperature Magnetorheological Fluid and Shape Memory Alloy Composite. Appl. Sci. 2022, 12, 3228. [Google Scholar] [CrossRef]
- Song, W.L.; Li, D.H.; Tao, Y.; Wang, N.; Xiu, S.C. Simulation and experimentation of a magnetorheological brake with adjustable gap. J. Intell. Mater. Syst. 2017, 28, 1614–1626. [Google Scholar] [CrossRef]
- Liu, X.H.; Chen, Q.Q.; Liu, H.; Wang, Z.B.; Zhao, H.D. Squeeze-Strengthening Effect of Silicone Oil-based Magnetorheological Fluid. J. Wuhan Univ. Technol.-Mat. Sci. Edit. 2016, 31, 523–527. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Gong, X.L.; Zhang, P.Q.; Wang, Q.M. Study on the mechanism of the squeeze-strengthen effect in magnetorheological fluids. J. Appl. Phys. 2004, 96, 2359–2364. [Google Scholar] [CrossRef] [Green Version]
- Lopez-Lopez, M.T.; Kuzhir, P.; Caballero-Hernandez, J.; Rodriguez-Arco, L.; Duran, J.D.G. Yield stress in magnetorheological suspensions near the limit of maximum-packing fraction. J. Rheol. 2012, 56, 1209–1224. [Google Scholar] [CrossRef] [Green Version]
- Luo, Q.; Wang, Y.Q.; Liu, H.B.; Wang, J.P.; Li, Y.P.; Li, T. Analysis of quasistatic squeeze behavior of magnetorheological fluid from the microstructure variations. J. Intell. Mater. Syst. 2021, 32, 2127–2138. [Google Scholar] [CrossRef]
- Ma, J.Z.; Huang, H.L.; Huang, J. Characteristics Analysis and Testing of SMA Spring Actuator. Adv. Mater. Sci. Eng. 2013, 2013, 7. [Google Scholar] [CrossRef] [Green Version]
- Xiong, Y.; Huang, J.; Shu, R.Z. Thermomechanical performance analysis and experiment of electrothermal shape memory alloy helical spring actuator. Adv. Mech. Eng. 2021, 13, 12. [Google Scholar] [CrossRef]
- He, Y.J.; Sun, Q.P. Rate-Dependent Damping Capacity of NiTi Shape Memory Alloy. Solid. State. Phenom. 2011, 172–174, 37–42. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| r1 | r2 | r3 | r4 | L1 | L2 | L3 | L4 | L5 | L6 | L7 |
|---|---|---|---|---|---|---|---|---|---|---|
| 55 mm | 25 mm | 58 mm | 70 mm | 57 mm | 9.5 mm | 6 mm | 2 mm | 1.5 mm | 10 mm | 3.5 mm |
| Parameter | Value | Parameter | Value |
|---|---|---|---|
| Volume fraction (ϕ)/% | 25 | Zero-field viscosity (η)/Pa∙s | 0.8 |
| Density/g/cm3 | 2.65 | Base liquid | Silicone oil |
| Relative permeability of the medium (μf) | 400 | Relative permeability of particles (μp) | 10 |
| Vacuum permeability (μ0)/T∙m/A | 4π × 10−7 |
| AS/°C | AP/°C | AF/°C | GA/GPa |
| 63.28 | 83.53 | 92.91 | 200 |
| MS/°C | MP/°C | MF/°C | GM/GPa |
| 36.21 | 43.81 | 49.47 | 70 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Chen, W.; Huang, J. Study of Variable Thickness Magnetorheological Transmission Performance of Electrothermal Shape Memory Alloy Squeeze. Appl. Sci. 2022, 12, 4297. https://doi.org/10.3390/app12094297
Chen S, Chen W, Huang J. Study of Variable Thickness Magnetorheological Transmission Performance of Electrothermal Shape Memory Alloy Squeeze. Applied Sciences. 2022; 12(9):4297. https://doi.org/10.3390/app12094297
Chicago/Turabian StyleChen, Song, Wenjian Chen, and Jin Huang. 2022. "Study of Variable Thickness Magnetorheological Transmission Performance of Electrothermal Shape Memory Alloy Squeeze" Applied Sciences 12, no. 9: 4297. https://doi.org/10.3390/app12094297
APA StyleChen, S., Chen, W., & Huang, J. (2022). Study of Variable Thickness Magnetorheological Transmission Performance of Electrothermal Shape Memory Alloy Squeeze. Applied Sciences, 12(9), 4297. https://doi.org/10.3390/app12094297