
Aerodynamic Efficiency Improvement on a NACA-8412 Airfoil via Active Flow Control Implementation



Abstract
:1. Introduction
2. Numerical Method
2.1. Governing Equations and Turbulence Model
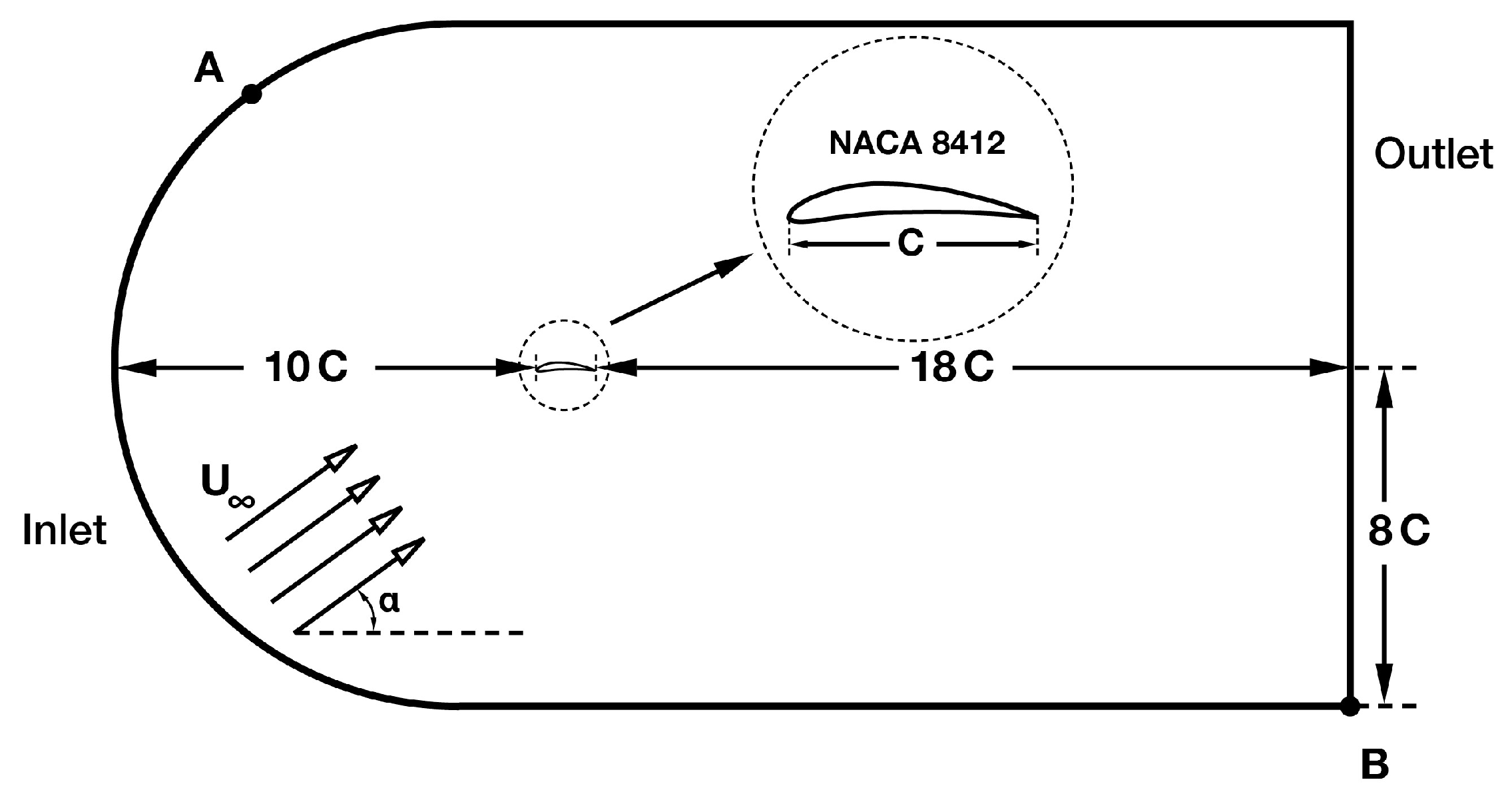
2.2. Numerical Domain and Boundary Conditions
2.3. Non-Dimensional Parameters
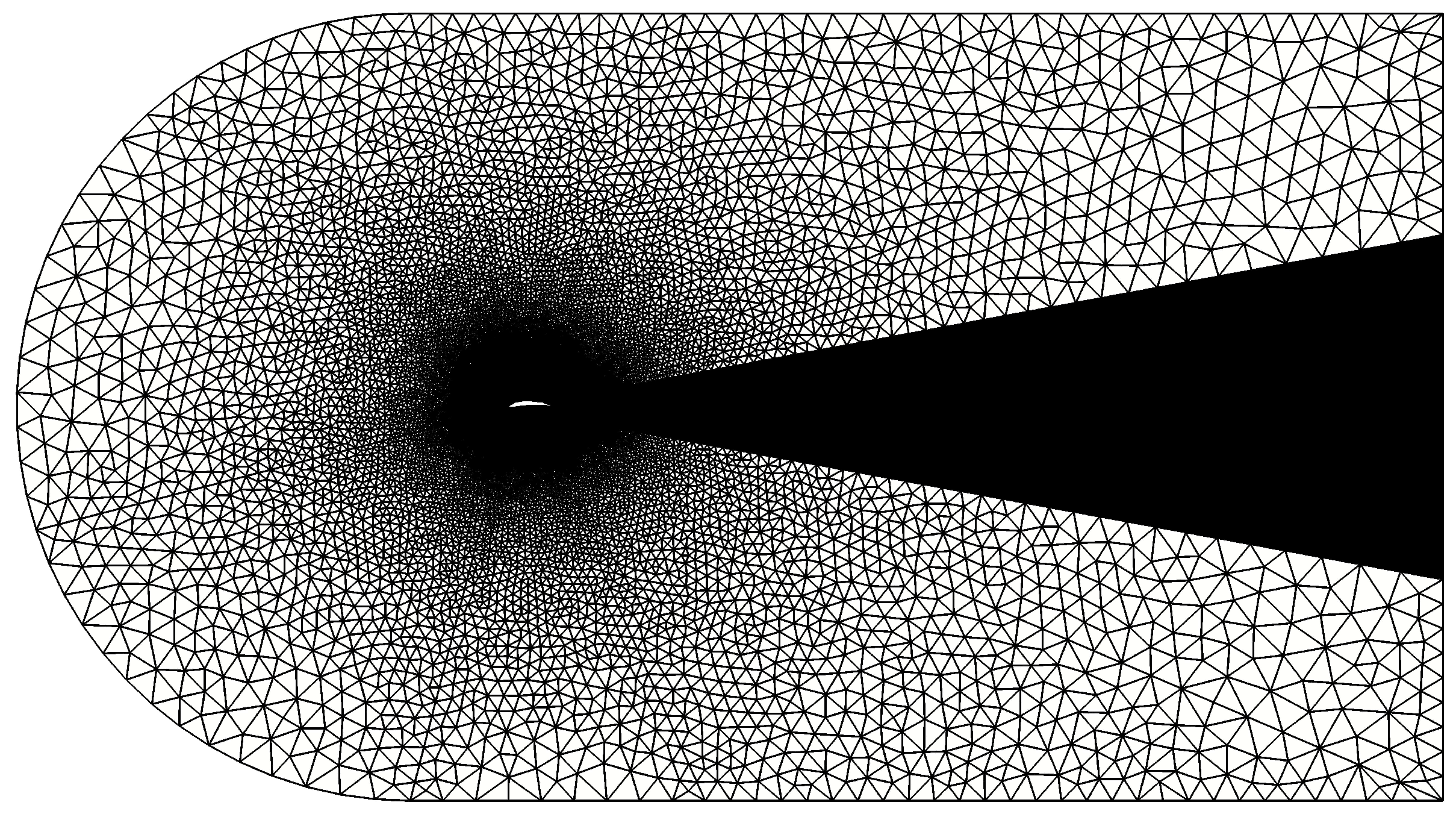
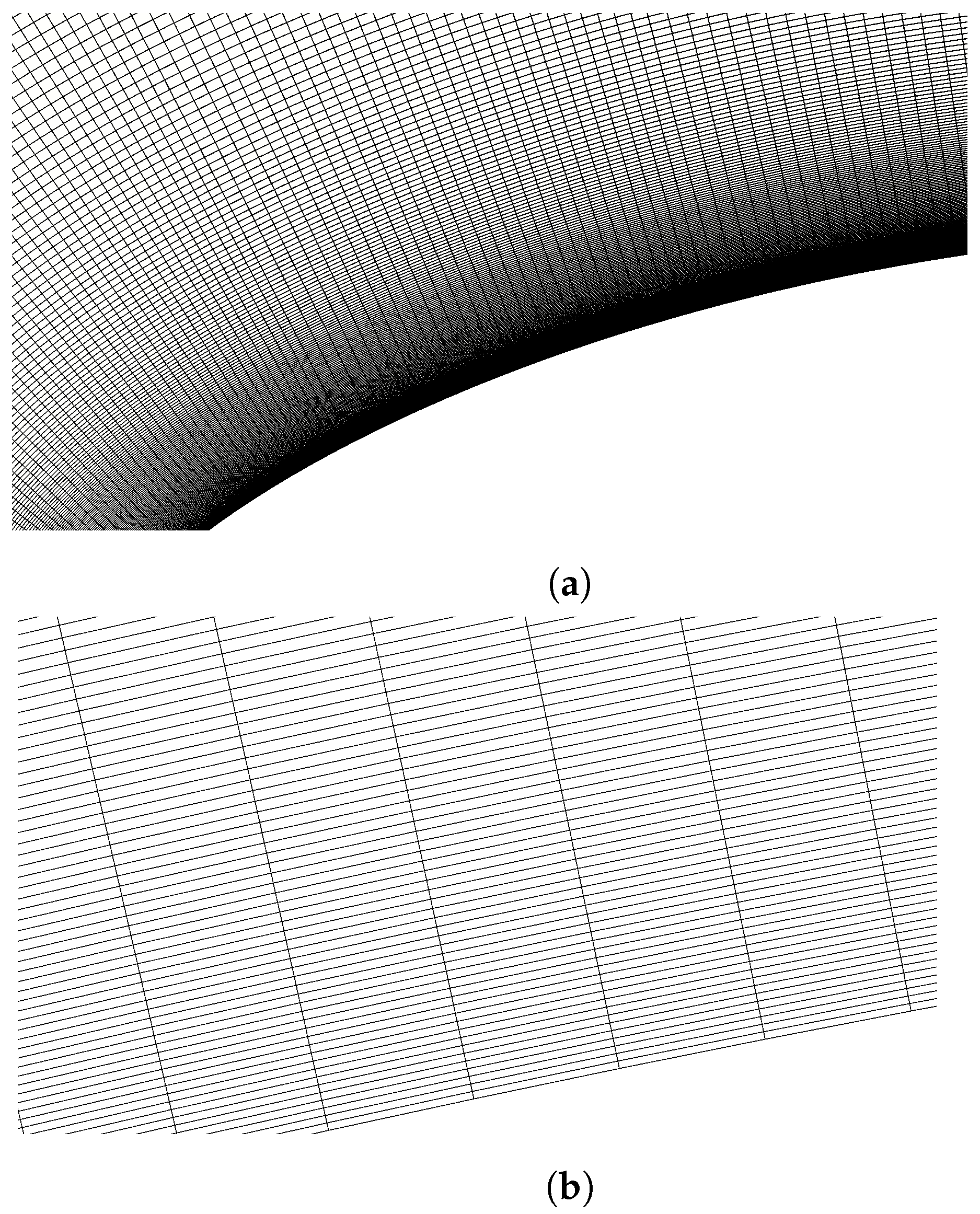
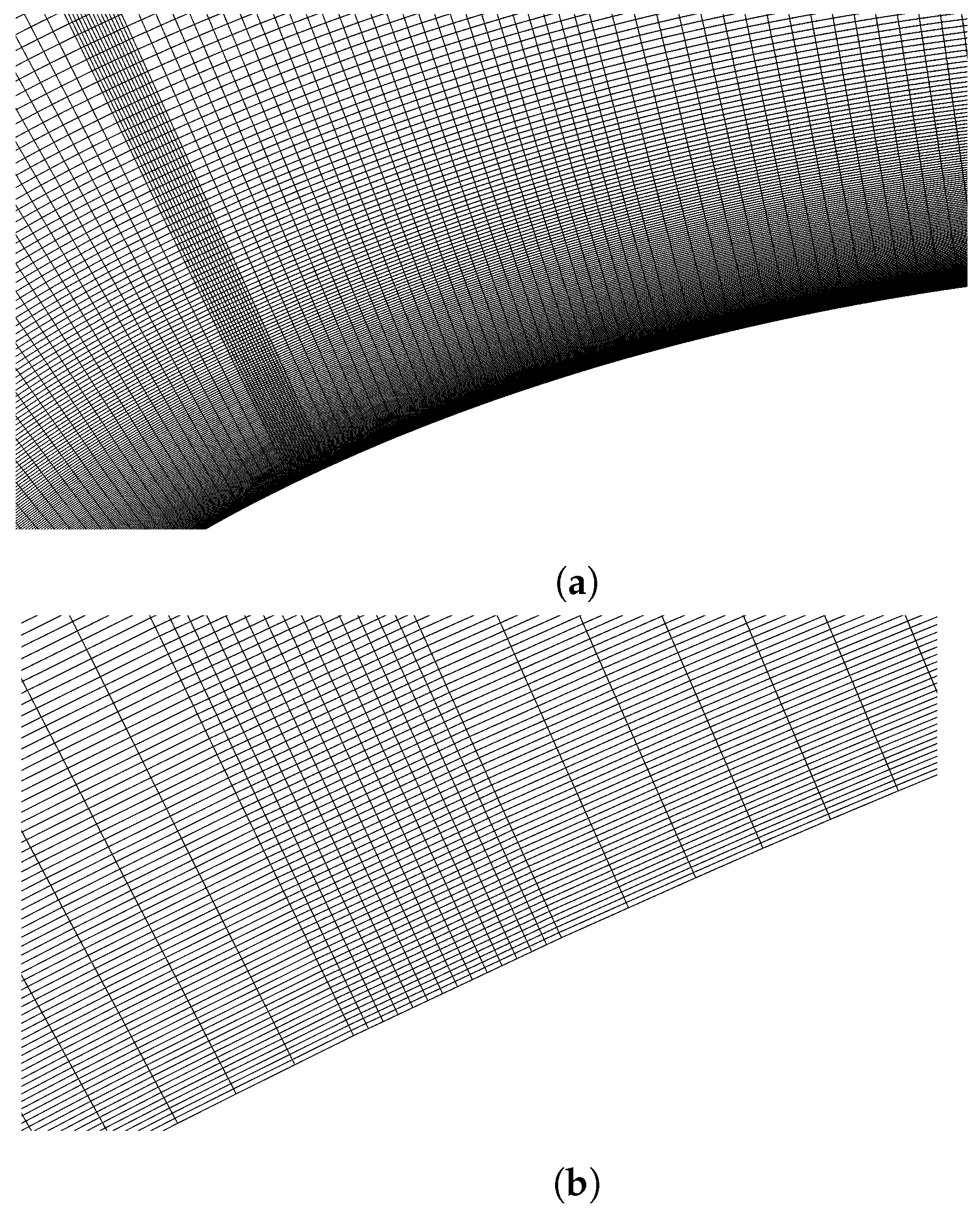
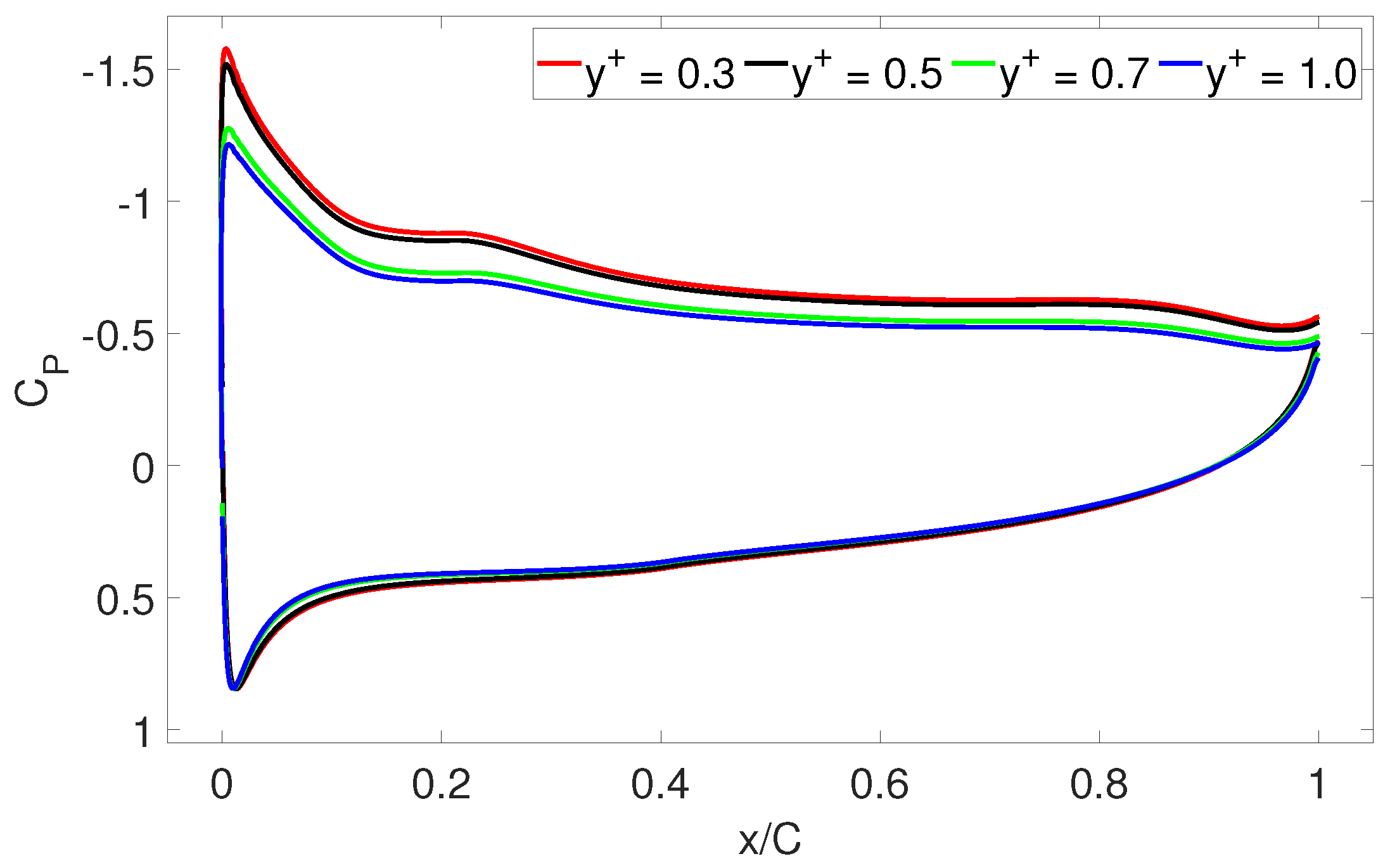
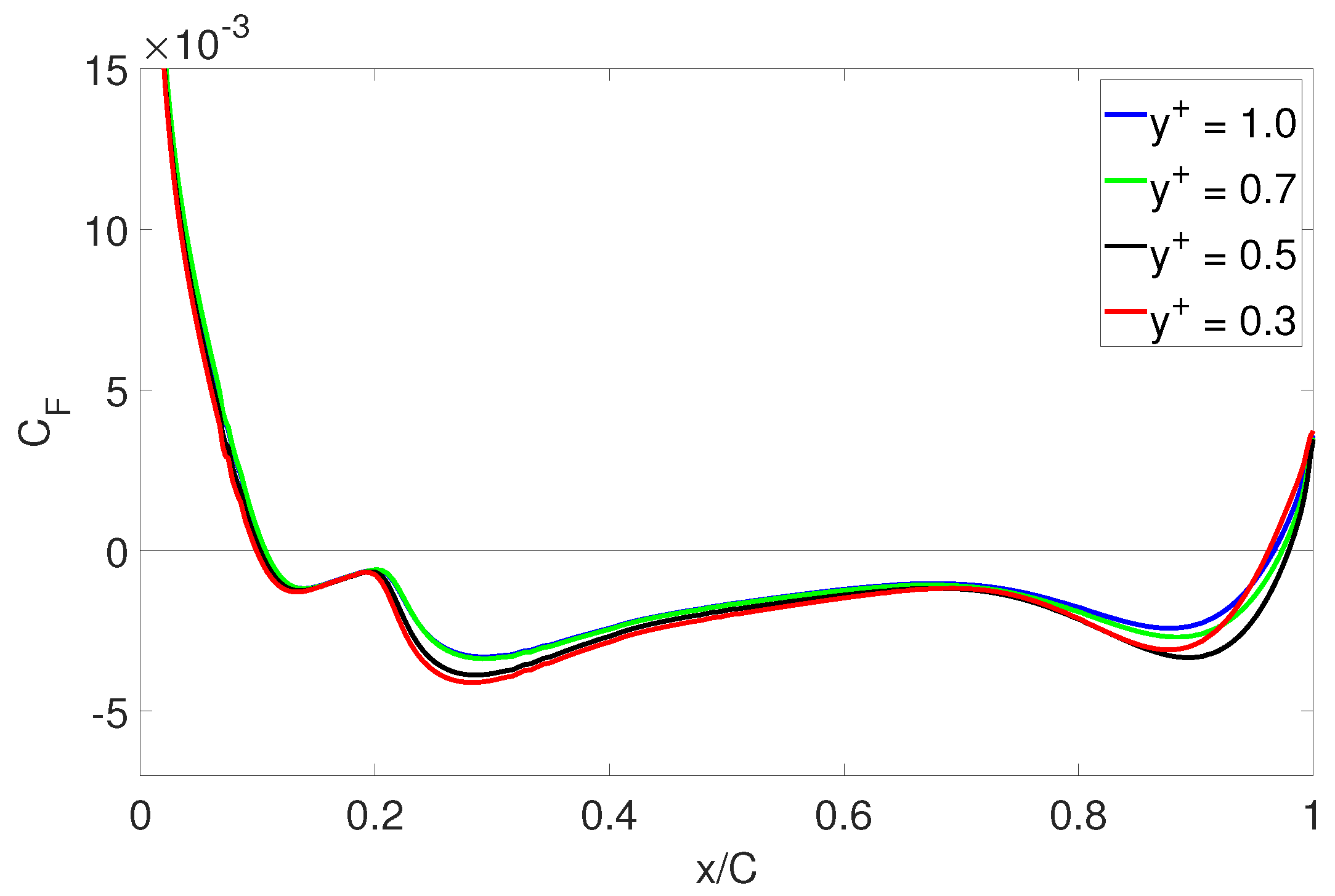
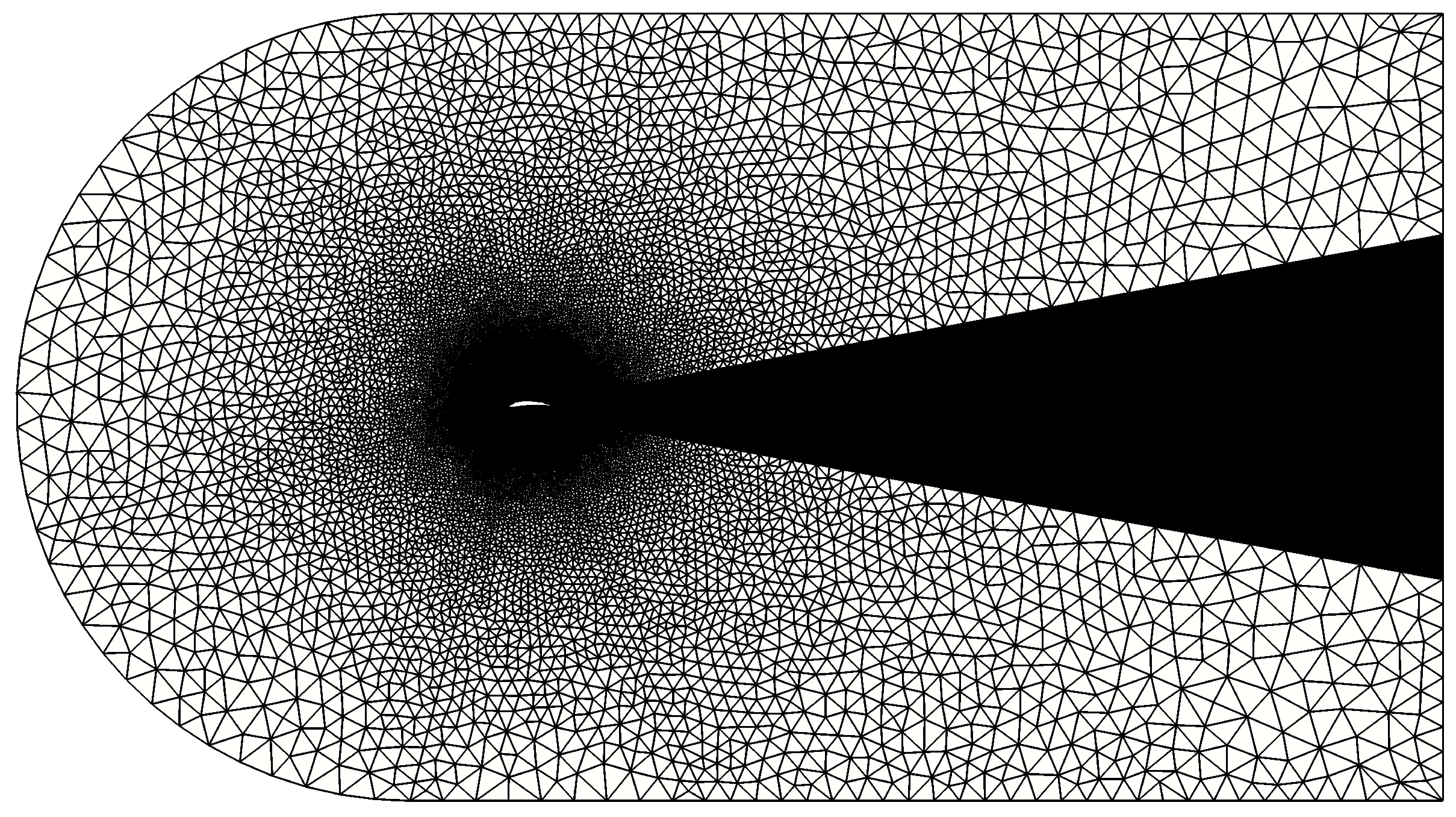
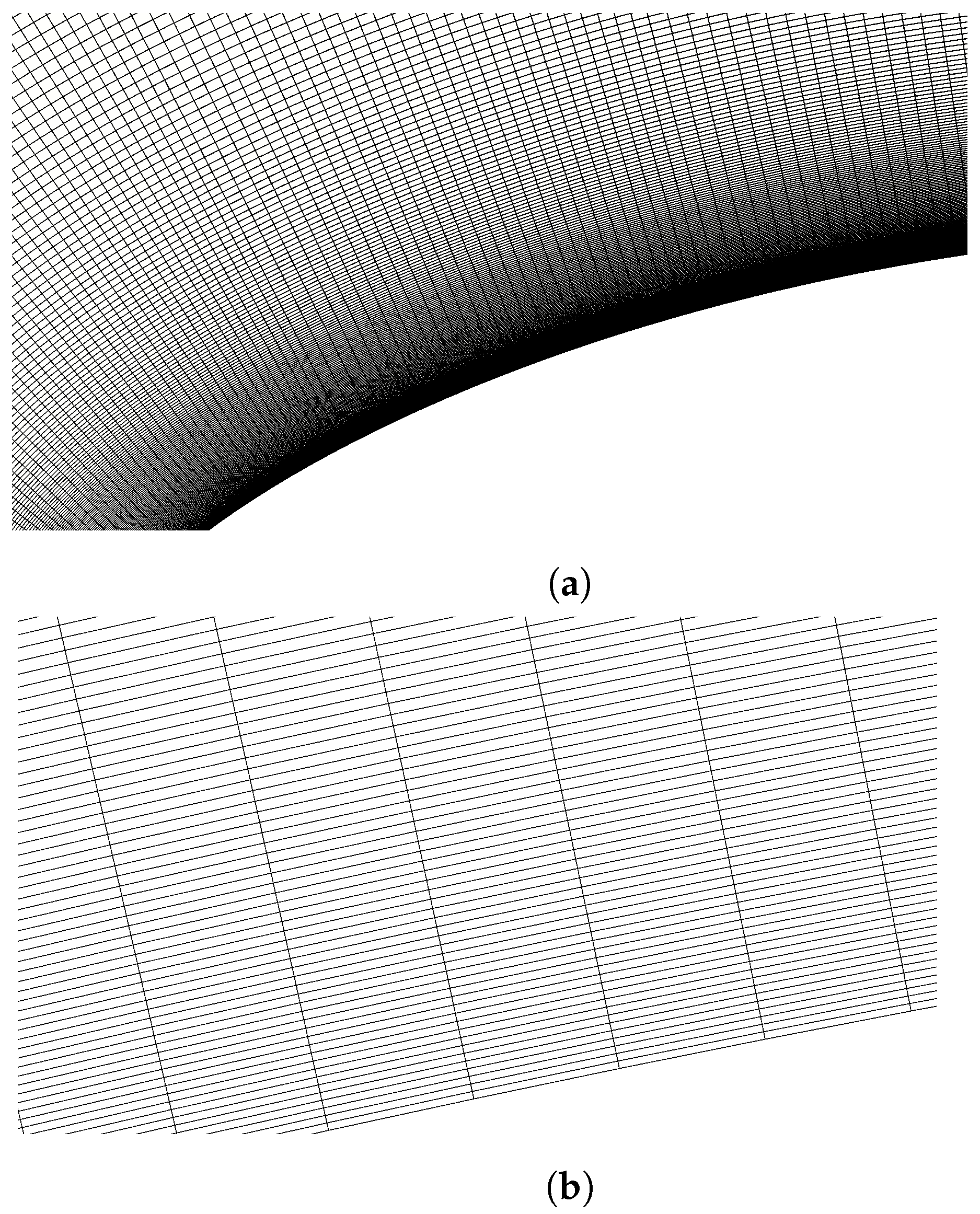
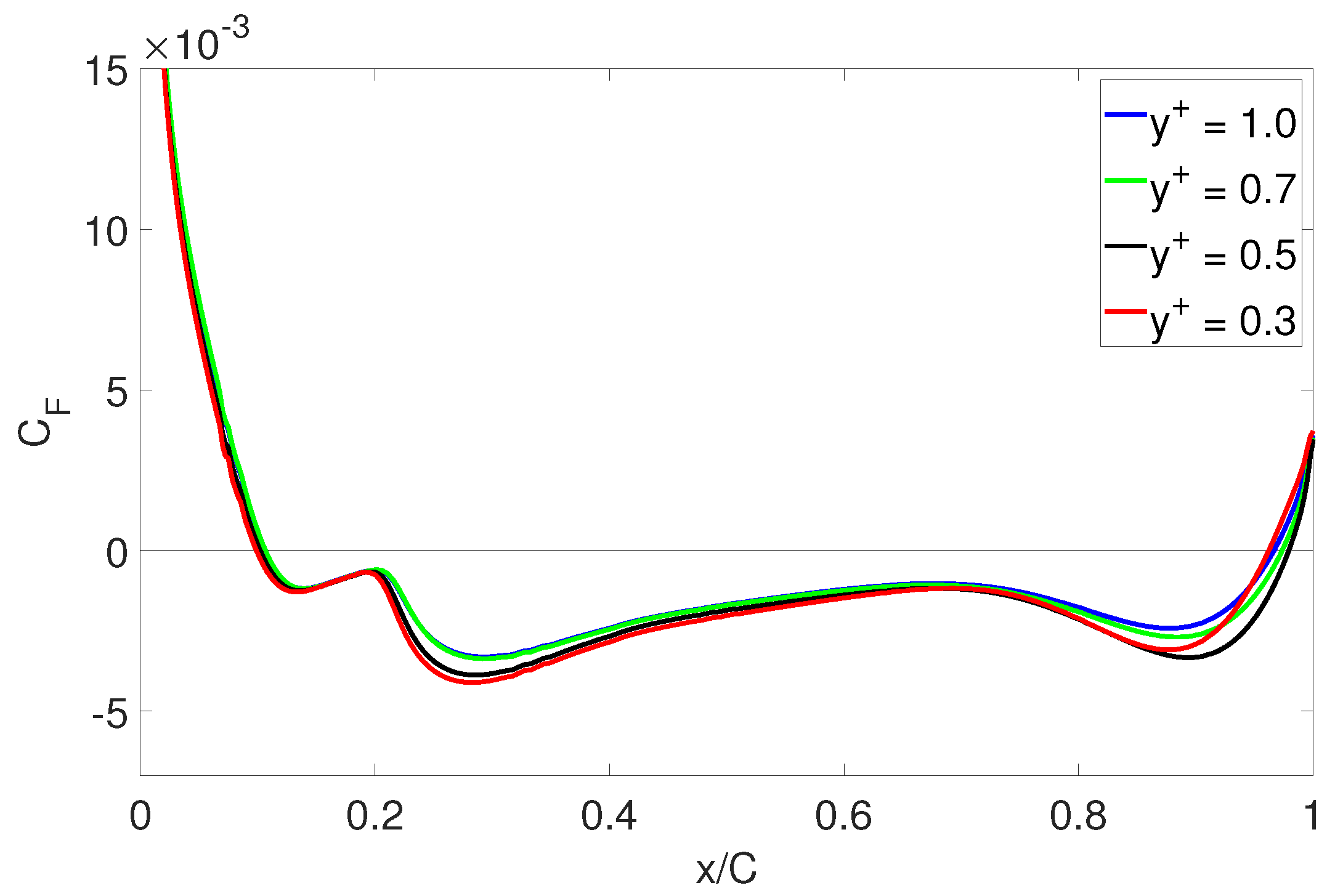
2.4. Mesh Assessment
3. AFC Implementation
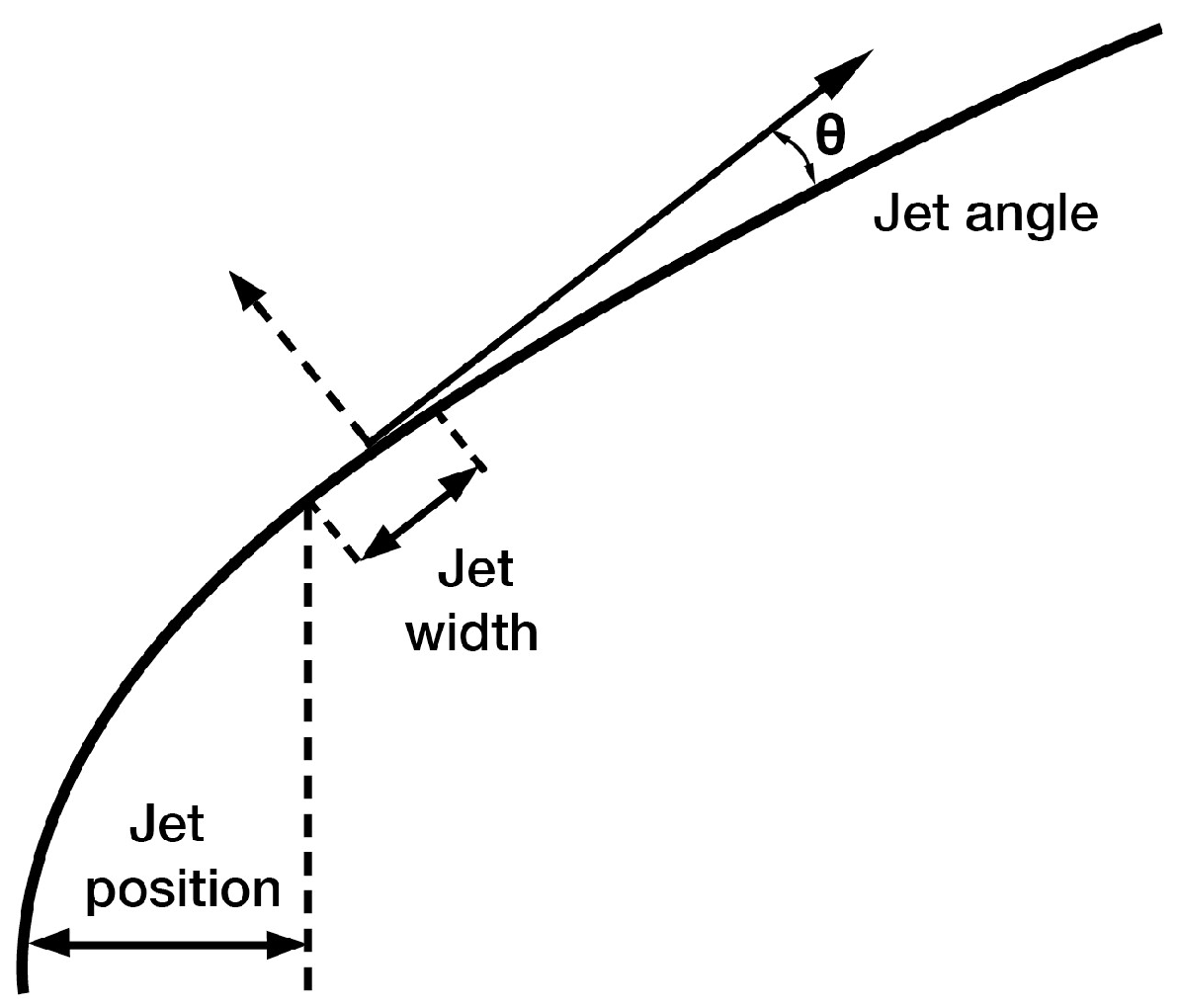
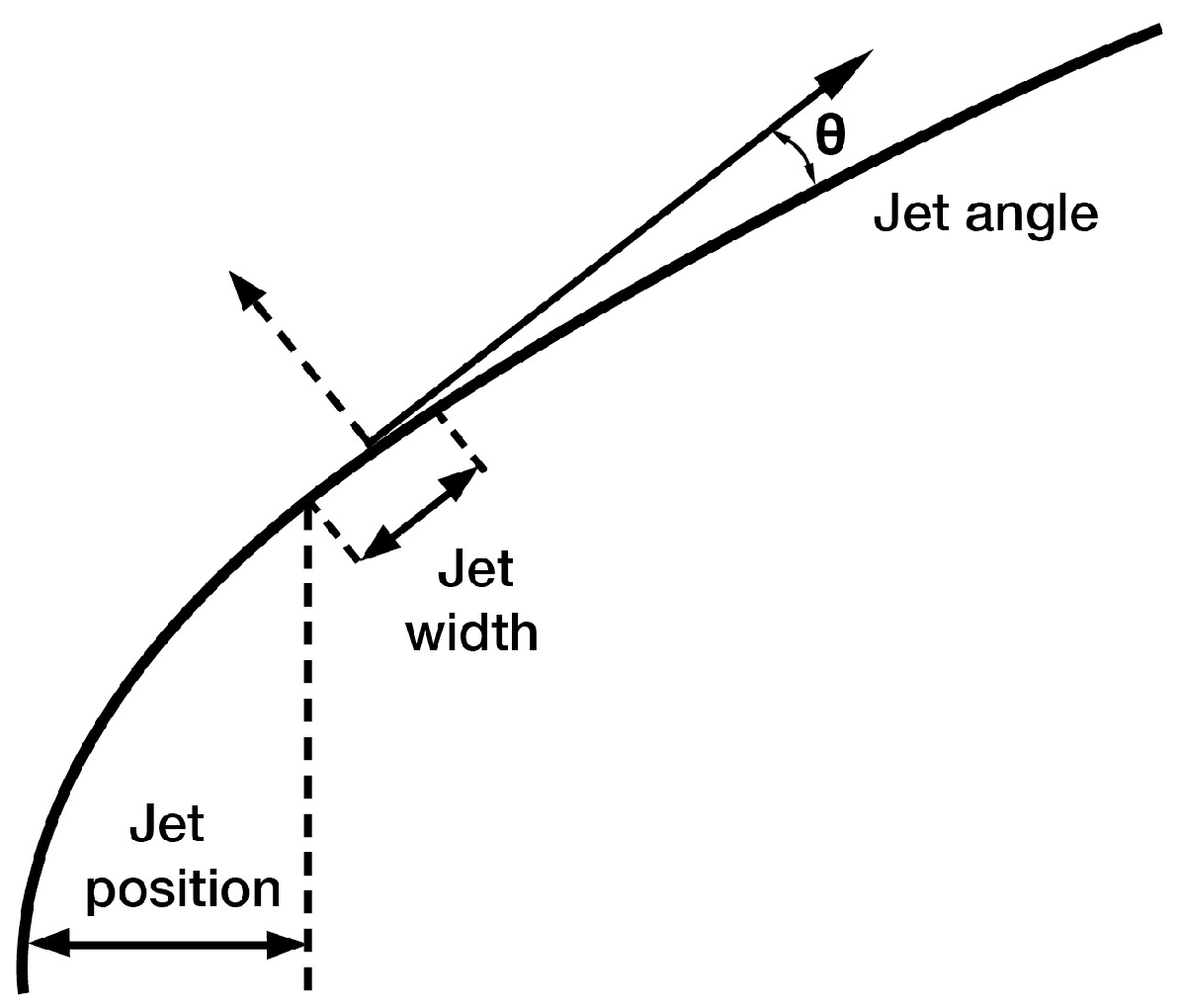
3.1. Jet Location and Mesh Modification
3.2. AFC Velocity Input
4. Results
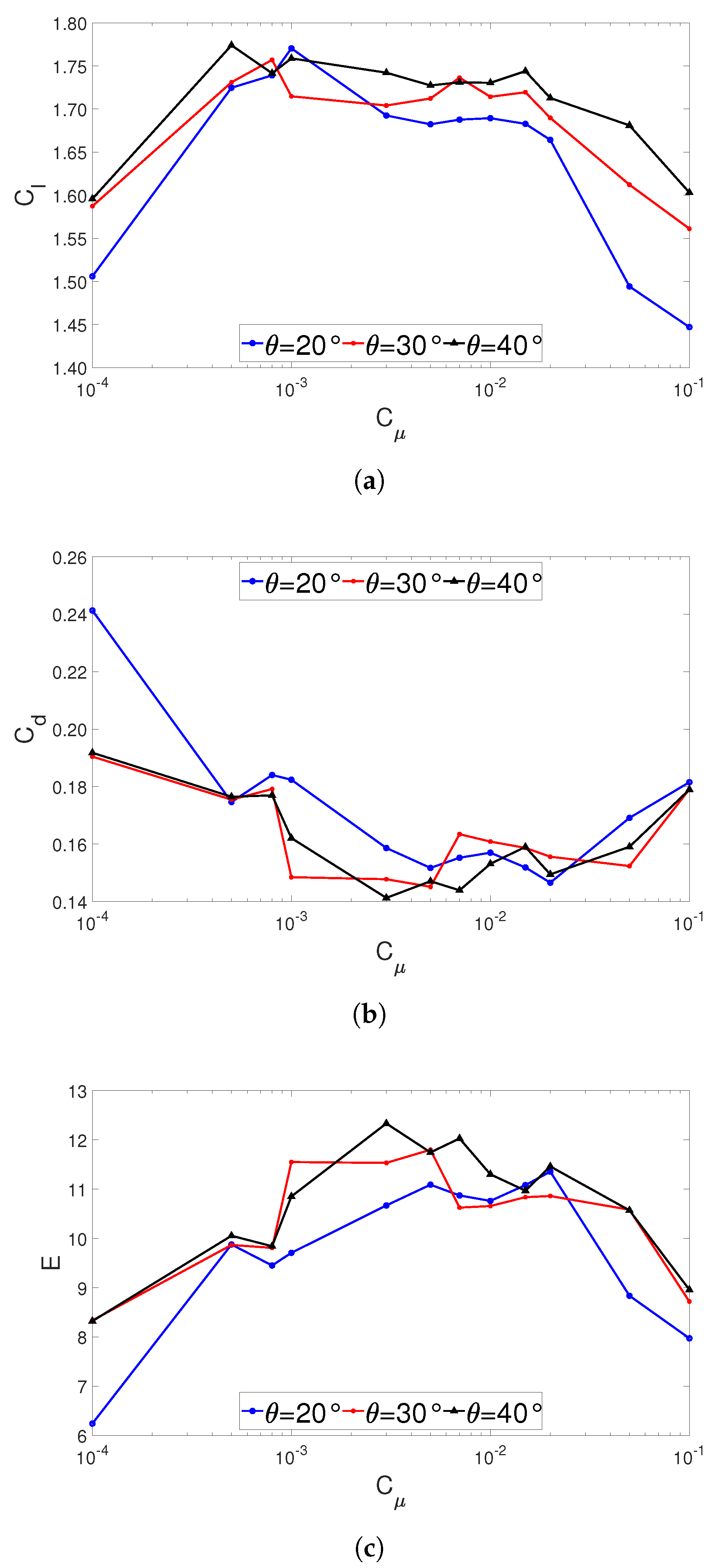
4.1. Optimal and Configuration
4.2. Forcing Frequency Analysis
4.3. Energy Assessment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
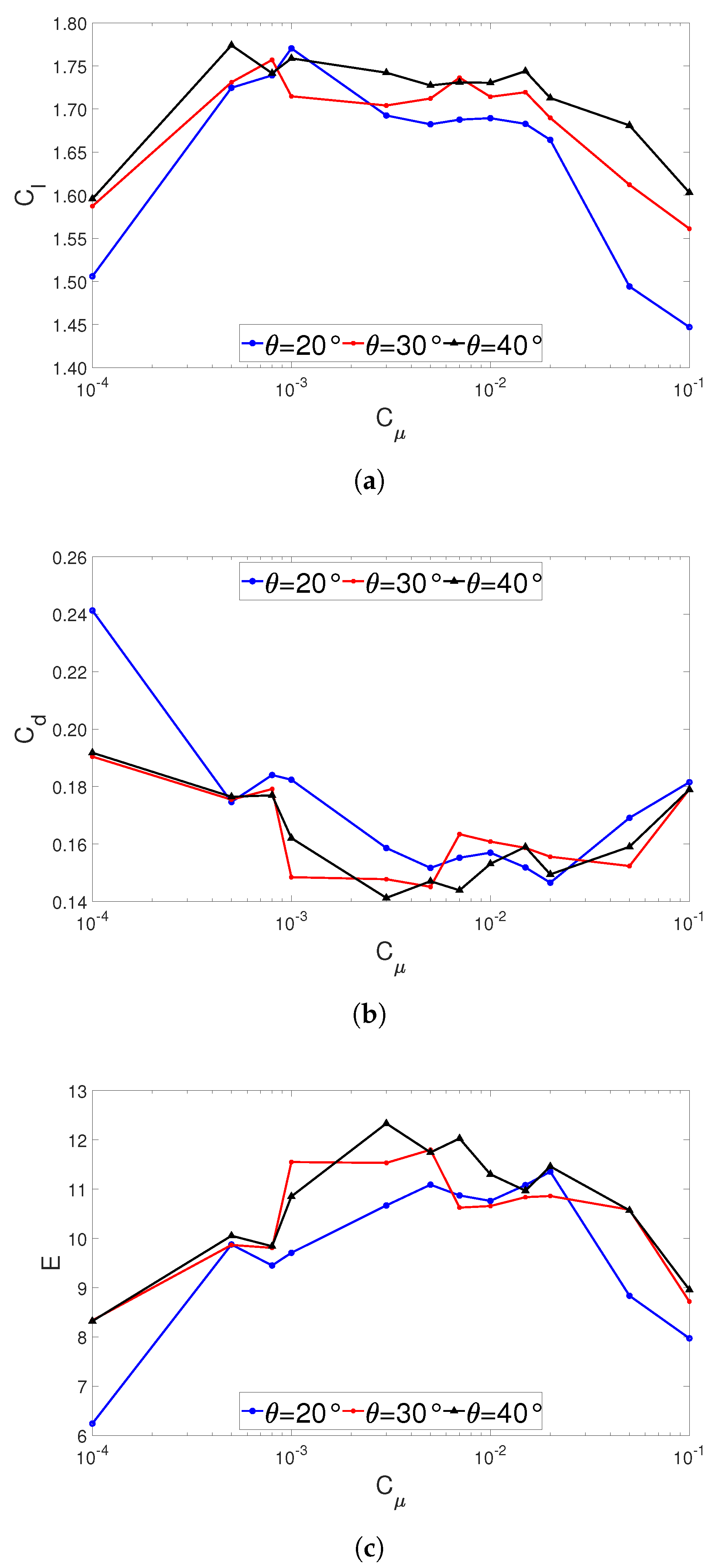
Appendix A. Lift, Drag and Efficiency Results for the Different and Values Studied

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| E | ||||
|---|---|---|---|---|
| - | - | 1.2267 | 0.2393 | 5.1262 |
| 20° | 0.0001 | 1.5059 | 0.2413 | 6.2408 |
| 0.0005 | 1.7246 | 0.1746 | 9.8774 | |
| 0.0008 | 1.7390 | 0.1840 | 9.4511 | |
| 0.001 | 1.7704 | 0.1824 | 9.7061 | |
| 0.003 | 1.6925 | 0.1586 | 10.6715 | |
| 0.005 | 1.6823 | 0.1517 | 11.0897 | |
| 0.007 | 1.6877 | 0.1552 | 10.8744 | |
| 0.01 | 1.6893 | 0.1570 | 10.7599 | |
| 0.015 | 1.6828 | 0.1519 | 11.0783 | |
| 0.02 | 1.6642 | 0.1466 | 11.3520 | |
| 0.05 | 1.4941 | 0.1691 | 8.8356 | |
| 0.1 | 1.4470 | 0.1815 | 7.9725 | |
| 30° | 0.0001 | 1.5872 | 0.1904 | 8.3361 |
| 0.0005 | 1.7310 | 0.1754 | 9.8689 | |
| 0.0008 | 1.7570 | 0.1791 | 9.8102 | |
| 0.001 | 1.7147 | 0.1485 | 11.5468 | |
| 0.003 | 1.7041 | 0.1478 | 11.5298 | |
| 0.005 | 1.7122 | 0.1451 | 11.8001 | |
| 0.007 | 1.7363 | 0.1634 | 10.6261 | |
| 0.01 | 1.7141 | 0.1609 | 10.6532 | |
| 0.015 | 1.7194 | 0.1587 | 10.8343 | |
| 0.02 | 1.6897 | 0.1556 | 10.8593 | |
| 0.05 | 1.6121 | 0.1523 | 10.5850 | |
| 0.1 | 1.5612 | 0.1791 | 8.7169 | |
| 40° | 0.0001 | 1.5957 | 0.1918 | 8.3196 |
| 0.0005 | 1.7739 | 0.1764 | 10.0561 | |
| 0.0008 | 1.7415 | 0.1770 | 9.8390 | |
| 0.001 | 1.7587 | 0.1621 | 10.8495 | |
| 0.003 | 1.7421 | 0.1413 | 12.3291 | |
| 0.005 | 1.7273 | 0.1471 | 11.7424 | |
| 0.007 | 1.7309 | 0.1439 | 12.0285 | |
| 0.01 | 1.7304 | 0.1531 | 11.3024 | |
| 0.015 | 1.7439 | 0.1590 | 10.9679 | |
| 0.02 | 1.7128 | 0.1495 | 11.4569 | |
| 0.05 | 1.6810 | 0.1590 | 10.5723 | |
| 0.1 | 1.6031 | 0.1790 | 8.9559 |
References
- Hochhäusler, D.; Erfort, G. Experimental study on an airfoil equipped with an active flow control element. Wind. Eng. 2021. [Google Scholar] [CrossRef]
- Khalil, K.; Asaro, S.; Bauknecht, A. Active flow control devices for wing load alleviation. J. Aircr. 2022, 59, 458–473. [Google Scholar] [CrossRef]
- Mosca, V.; Karpuk, S.; Sudhi, A.; Badrya, C.; Elham, A. Multidisciplinary design optimisation of a fully electric regional aircraft wing with active flow control technology. Aeronaut. J. 2021, 126, 730–754. [Google Scholar] [CrossRef]
- Tousi, N.M.; Coma, M.; Bergada, J.M.; Pons-Prats, J.; Mellibovsky, F.; Bugeda, G. Active Flow Control Optimisation on SD7003 Airfoil at Pre and Post-Stall Angles of Attack using Synthetic Jets. Appl. Math. Model. 2021, 98, 435–464. [Google Scholar] [CrossRef]
- Tadjfar, M.; Kamari, D. Optimization of Flow Control Parameters Over SD7003 Airfoil with Synthetic Jet Actuator. J. Fluids Eng. 2020, 142, 021206. [Google Scholar] [CrossRef]
- De Giorgi, M.; De Luca, C.; Ficarella, A.; Marra, F. Comparison between synthetic jets and continuous jets for active flow control: Application on a NACA 0015 and a compressor stator cascade. Aerosp. Sci. Technol. 2015, 43, 256–280. [Google Scholar] [CrossRef]
- Traficante, S.; De Giorgi, M.; Ficarella, A. Flow separation control on a compressor-stator cascade using plasma actuators and synthetic and continuous jets. J. Aerosp. Eng. 2016, 29, 04015056. [Google Scholar] [CrossRef]
- Zhang, H.; Chen, S.; Gong, Y.; Wang, S. A comparison of different unsteady flow control techniques in a highly loaded compressor cascade. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2019, 233, 2051–2065. [Google Scholar] [CrossRef]
- Cattafesta, L.N.; Sheplak, M. Actuators for Active Flow Control. Annu. Rev. Fluid Mech. 2011, 43, 247–272. [Google Scholar] [CrossRef] [Green Version]
- Wang, L.; Tian, F.B. Numerical simulation of flow over a parallel cantilevered flag in the vicinity of a rigid wall. Phys. Rev. E 2019, 99, 053111. [Google Scholar] [CrossRef]
- Cho, Y.C.; Shyy, W. Adaptive flow control of low-Reynolds number aerodynamics using dielectric barrier discharge actuator. Prog. Aerosp. Sci. 2011, 47, 495–521. [Google Scholar] [CrossRef] [Green Version]
- Foshat, S. Numerical investigation of the effects of plasma actuator on separated laminar flows past an incident plate under ground effect. Aerosp. Sci. Technol. 2020, 98, 105646. [Google Scholar] [CrossRef]
- Benard, N.; Moreau, E. Electrical and mechanical characteristics of surface AC dielectric barrier discharge plasma actuators applied to airflow control. Exp. Fluids 2014, 55, 1846. [Google Scholar] [CrossRef] [Green Version]
- Benard, N.; Pons-Prats, J.; Periaux, J.; Bugeda, G.; Braud, P.; Bonnet, J.; Moreau, E. Turbulent separated shear flow control by surface plasma actuator: Experimental optimization by genetic algorithm approach. Exp. Fluids 2016, 57, 22. [Google Scholar] [CrossRef] [Green Version]
- Bergadà, J.M.; Baghaei, M.; Prakash, B.; Mellibovsky, F. Fluidic Oscillators, Feedback Channel Effect under Compressible Flow Conditions. Sensors 2021, 21, 5768. [Google Scholar] [CrossRef]
- Baghaei, M.; Bergada, J.M. Fluidic Oscillators, the Effect of Some Design Modifications. Appl. Sci. 2020, 10, 2105. [Google Scholar] [CrossRef] [Green Version]
- Baghaei, M.; Bergada, J.M. Analysis of the Forces Driving the Oscillations in 3D Fluidic Oscillators. Energies 2019, 12, 4720. [Google Scholar] [CrossRef] [Green Version]
- Glezer, A.; Amitay, M. Synthetic jets. Annu. Rev. Fluid Mech. 2002, 34, 503–529. [Google Scholar] [CrossRef]
- Rumsey, C.; Gatski, T.; Sellers, W.; Vatsa, V.; Viken, S. Summary of the 2004 CFD validation workshop on synthetic jets and turbulent separation control. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, OR, USA, 28 June–1 July 2004; p. 2217. [Google Scholar]
- Wygnanski, I. The variables affecting the control of separation by periodic excitation. In Proceedings of the 2nd AIAA Flow Control Conference, Portland, OR, USA, 28 June–1 July 2004; p. 2505. [Google Scholar]
- Findanis, N.; Ahmed, N. The interaction of an asymmetrical localised synthetic jet on a side-supported sphere. J. Fluids Struct. 2008, 24, 1006–1020. [Google Scholar] [CrossRef]
- Amitay, M.; Smith, D.R.; Kibens, V.; Parekh, D.E.; Glezer, A. Aerodynamic flow control over an unconventional airfoil using synthetic jet actuators. AIAA J. 2001, 39, 361–370. [Google Scholar] [CrossRef]
- Amitay, M.; Glezer, A. Role of actuation frequency in controlled flow reattachment over a stalled airfoil. AIAA J. 2002, 40, 209–216. [Google Scholar] [CrossRef]
- Gilarranz, J.; Traub, L.; Rediniotis, O. A New Class of Synthetic Jet Actuators—Part I: Design, Fabrication and Bench Top Characterization. J. Fluids Eng. 2005, 127, 367–376. [Google Scholar] [CrossRef]
- You, D.; Moin, P. Active control of flow separation over an airfoil using synthetic jets. J. Fluids Struct. 2008, 24, 1349–1357. [Google Scholar] [CrossRef]
- Tuck, A.; Soria, J. Separation control on a NACA 0015 airfoil using a 2D micro ZNMF jet. Aircr. Eng. Aerosp. Technol. 2008, 80, 175–180. [Google Scholar] [CrossRef]
- Kitsios, V.; Cordier, L.; Bonnet, J.P.; Ooi, A.; Soria, J. On the coherent structures and stability properties of a leading-edge separated aerofoil with turbulent recirculation. J. Fluid Mech. 2011, 683, 395–416. [Google Scholar] [CrossRef]
- Buchmann, N.; Atkinson, C.; Soria, J. Influence of ZNMF jet flow control on the spatio-temporal flow structure over a NACA-0015 airfoil. Exp. Fluids 2013, 54, 1485. [Google Scholar] [CrossRef]
- Kim, S.H.; Kim, C. Separation control on NACA23012 using synthetic jet. Aerosp. Sci. Technol. 2009, 13, 172–182. [Google Scholar] [CrossRef]
- Monir, H.E.; Tadjfar, M.; Bakhtian, A. Tangential synthetic jets for separation control. J. Fluids Struct. 2014, 45, 50–65. [Google Scholar] [CrossRef]
- Goodfellow, S.D.; Yarusevych, S.; Sullivan, P.E. Momentum Coefficient as a Parameter for Aerodynamic Flow Control with Synthetic Jets. AIAA J. 2013, 51, 623–631. [Google Scholar] [CrossRef]
- Feero, M.A.; Goodfellow, S.D.; Lavoie, P.; Sullivan, P.E. Flow Reattachment Using Synthetic Jet Actuation on a Low-Reynolds-Number Airfoil. AIAA J. 2015, 53, 2005–2014. [Google Scholar] [CrossRef]
- Feero, M.A.; Lavoie, P.; Sullivan, P.E. Influence of synthetic jet location on active control of an airfoil at low Reynolds number. Exp. Fluids 2017, 58, 99. [Google Scholar] [CrossRef]
- Zhang, W.; Samtaney, R. A direct numerical simulation investigation of the synthetic jet frequency effects on separation control of low-Re flow past an airfoil. Phys. Fluids 2015, 27, 055101. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez, I.; Lehmkuhl, O.; Borrell, R. Effects of the Actuation on the Boundary Layer of an Airfoil at Reynolds Number Re = 60000. Flow Turbul. Combust. 2020, 105, 607–626. [Google Scholar] [CrossRef]
- Spalart, P.; Allmaras, S. A one-equation turbulence model for aerodynamic flows. In Proceedings of the 30th Aerospace Sciences Meeting and Exhibit, Reno, NV, USA, 6–9 January 1992; p. 439. [Google Scholar] [CrossRef]
- Minelli, G.; Krajnovic, S.; Basara, B. Numerical Investigation of Active Flow Control Around a Generic Truck A-Pillar. Flow Turbul. Combust. 2016, 97, 1235–1254. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tuck, A.; Soria, J. Active flow control over a NACA 0015 airfoil using a ZNMF jet. In Proceedings of the 15th Australasian Fluid Mechanics Conference, Sydney, Australia, 13–17 December 2004; pp. 13–17. [Google Scholar]
- De Giorgi, M.G.; Traficante, S.; De Luca, C.; Bello, D.; Ficarella, A. Active flow control techniques on a stator compressor cascade: A comparison between synthetic jet and plasma actuators. In Proceedings of the ASME Turbo Expo 2012: Turbine Technical Conference and Exposition, Copenhagen, Denmark, 11–15 June 2012; American Society of Mechanical Engineers: New York, NY, USA, 2012; Volume 44748, pp. 439–450. [Google Scholar]




| Reynolds number | 68.5 × |
| Freestream velocity () | 1 m/s |
| Kinematic Viscosity () | 1.4599 × m2/s |
| Density () | 1.225 kg/m3 |
| Pulsating flow fluid density () | 1.225 kg/m3 |
| Angle of attack () | 15° |
| Chord length (C) | 1 m |
| Cl | Cd | Cl | Cd | Calculated Maximum | ||
|---|---|---|---|---|---|---|
| 1 | 120,879 | 1.0797 | 0.2218 | 14.93 | 9.14 | 0.9127 |
| 0.7 | 139,551 | 1.1153 | 0.2267 | 12.12 | 7.13 | 0.6544 |
| 0.5 | 160,557 | 1.2267 | 0.2393 | 3.35 | 1.97 | 0.4728 |
| 0.3 | 183,897 | 1.2692 | 0.2441 | - | - | 0.2887 |
| E | ||||
|---|---|---|---|---|
| 0.003 | 0.5 | 1.6473 | 0.2063 | 7.9853 |
| 1 | 1.7421 | 0.1413 | 12.3331 | |
| 2 | 1.8075 | 0.1289 | 14.0214 | |
| 3 | 1.8272 | 0.1120 | 16.3160 | |
| 4 | 1.8147 | 0.0942 | 19.2649 | |
| 5 | 1.8220 | 0.1054 | 17.2829 | |
| 7 | 1.7724 | 0.1190 | 14.8941 |
| Cases | [] | [] | [W] | [W] | |||
|---|---|---|---|---|---|---|---|
| max efficiency | 15 | 0.6832 | 0.01 | 40 | 5.3277 | 0.0889 | 166.81 |
| max lift | 15 | 0.6832 | 0.01 | 40 | 5.3277 | 0.0780 | 146.35 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Couto, N.; Bergada, J.M. Aerodynamic Efficiency Improvement on a NACA-8412 Airfoil via Active Flow Control Implementation. Appl. Sci. 2022, 12, 4269. https://doi.org/10.3390/app12094269
Couto N, Bergada JM. Aerodynamic Efficiency Improvement on a NACA-8412 Airfoil via Active Flow Control Implementation. Applied Sciences. 2022; 12(9):4269. https://doi.org/10.3390/app12094269
Chicago/Turabian StyleCouto, Nil, and Josep M. Bergada. 2022. "Aerodynamic Efficiency Improvement on a NACA-8412 Airfoil via Active Flow Control Implementation" Applied Sciences 12, no. 9: 4269. https://doi.org/10.3390/app12094269
APA StyleCouto, N., & Bergada, J. M. (2022). Aerodynamic Efficiency Improvement on a NACA-8412 Airfoil via Active Flow Control Implementation. Applied Sciences, 12(9), 4269. https://doi.org/10.3390/app12094269