
Nonuniform Dual-Rate Extended Kalman-Filter-Based Sensor Fusion for Path-Following Control of a Holonomic Mobile Robot with Four Mecanum Wheels


Abstract
:1. Introduction
- Consideration of a NUDREKF, which enables us to generate fast-rate state estimates from nonuniform, slow-rate measurements to be supplied to the fast-rate motion controller in order to reach a satisfactory path-following behavior.
- Modification of the Pure Pursuit path-tacking algorithm to improve adaptability to the change in turning and curvature sections of paths.
- Development of a powerful simulation tool, which takes into account complex modeling aspects to realistically represent the mobile platform movement.
2. Problem Scenario
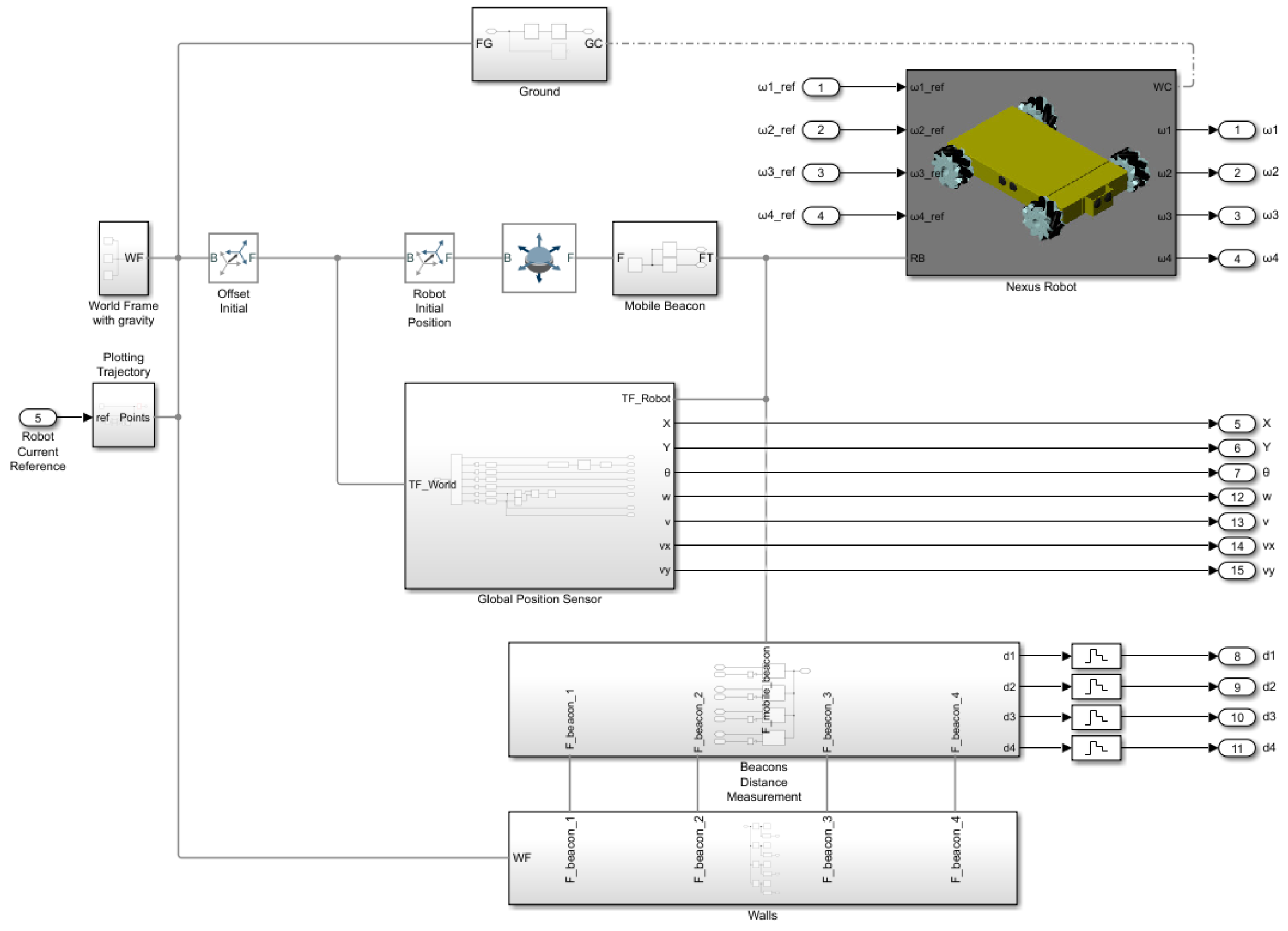
- Robot simulator, which contains some complex vehicle modeling aspects as a result of using the features of the specialized Simscape Multibody simulation tool, and includes a dynamic proportional–integral (PI) controller for controlling the velocities of the wheels. More details can be found in Section 4.
- Control structure, which includes a path-tracking controller (in this case, the Pure Pursuit algorithm), PI controllers for angular orientation and linear and angular velocities, an inverse kinematics computation block, and a state estimator (in this case, the proposed NUDREKF).
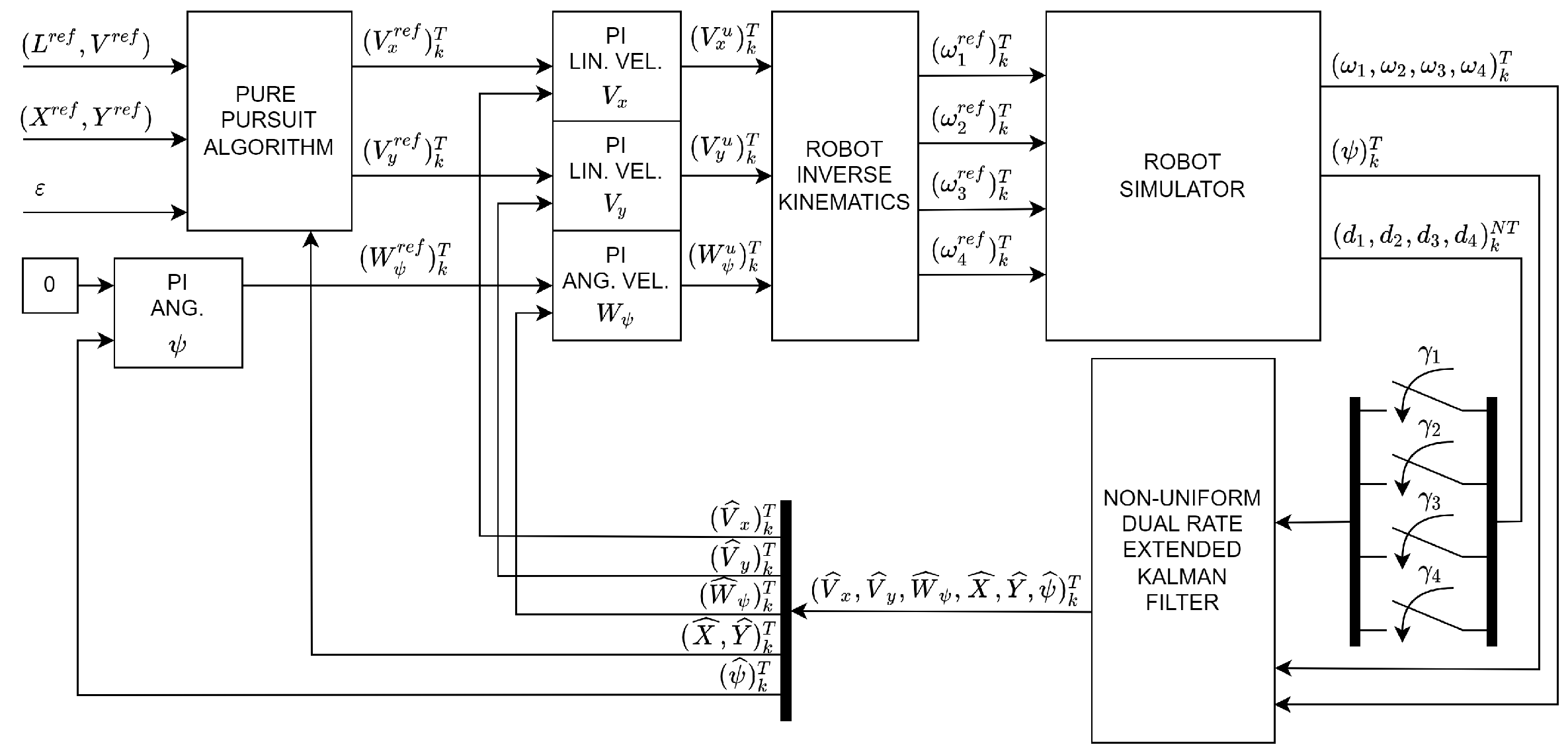
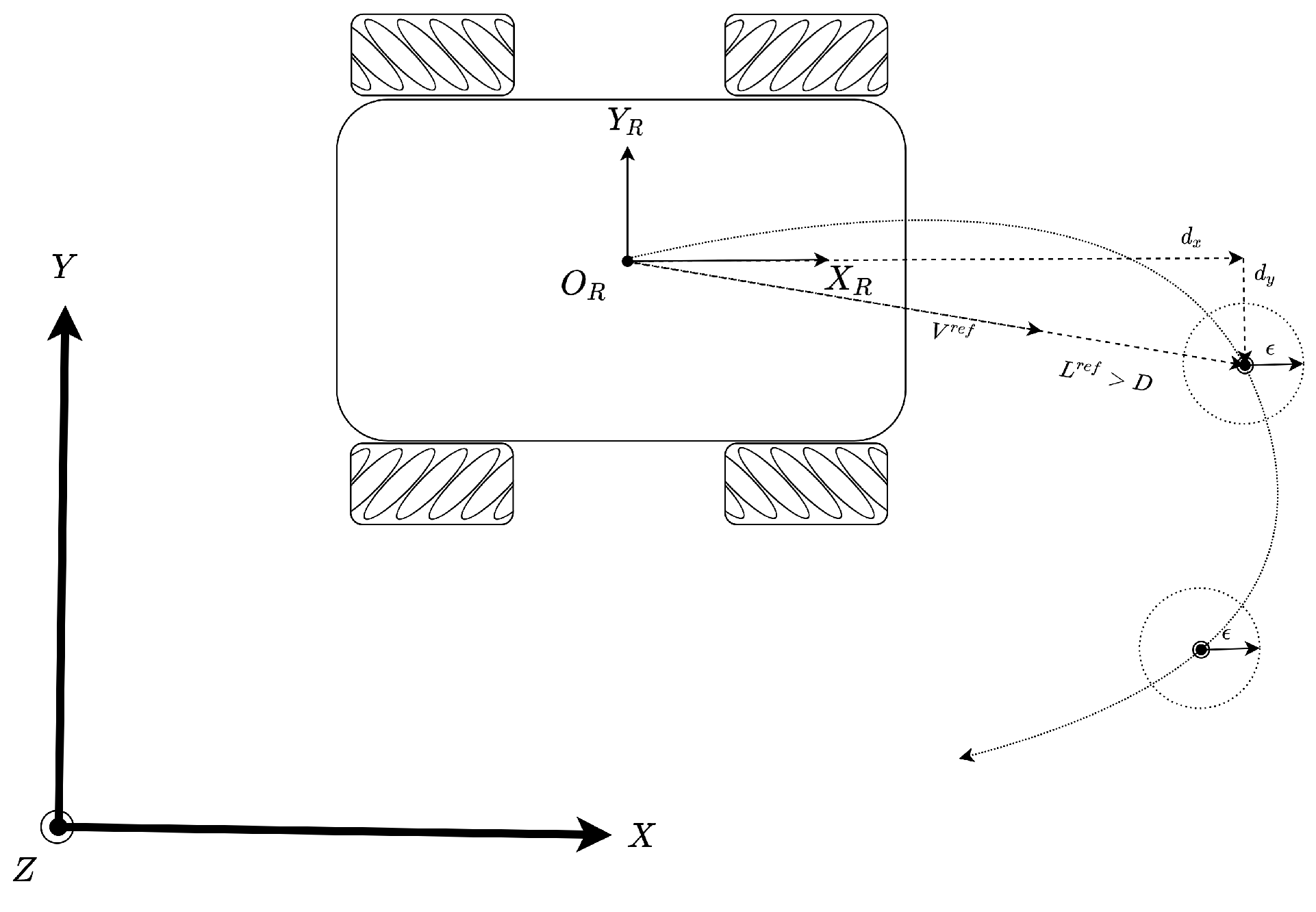
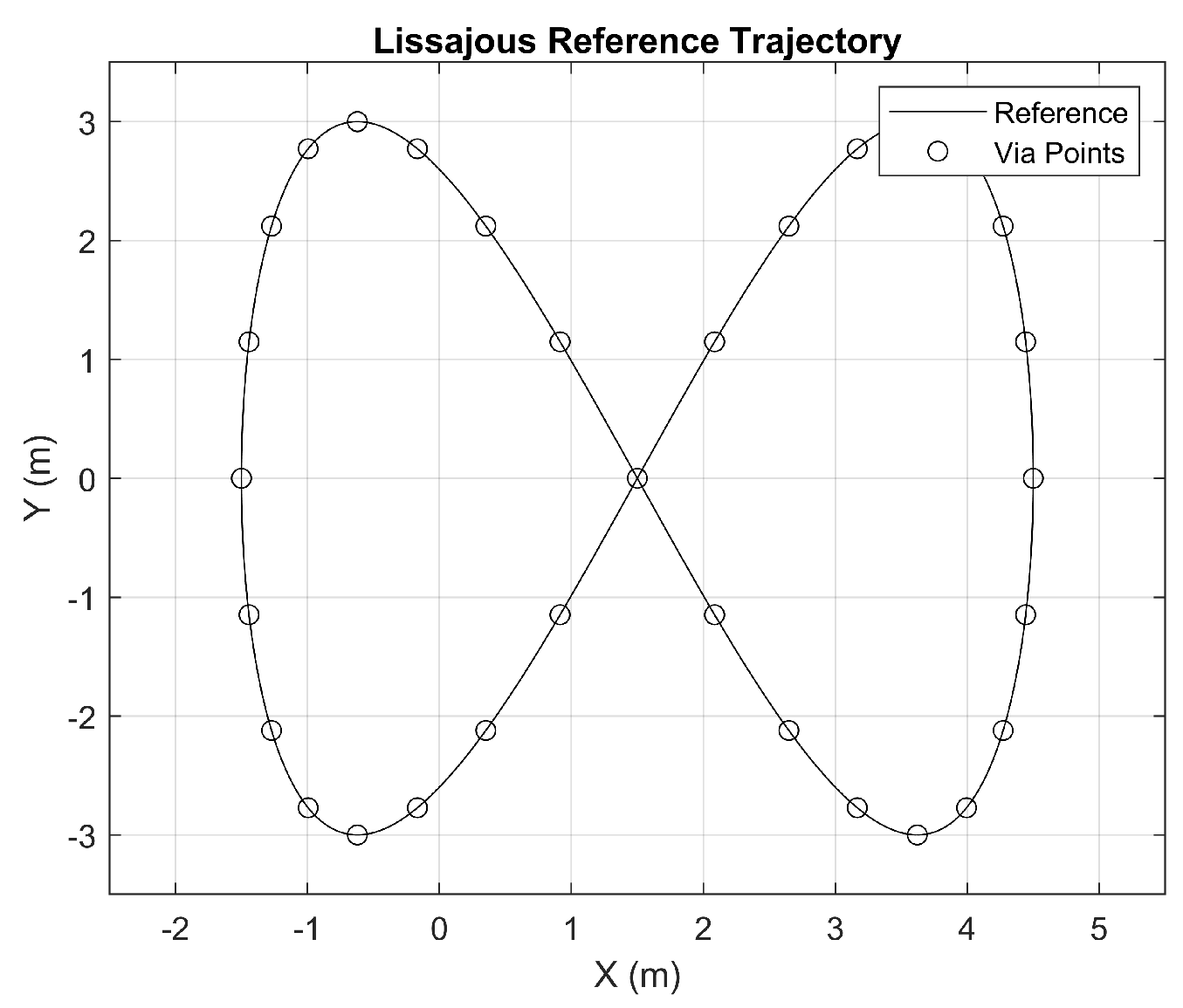
- At the current instant , from a set of waypoints and the current position estimation , the Pure Pursuit path-tracking algorithm [9] generates the reference linear velocities along the X-axis and Y-axis of the vehicle body, . Other important parameters of the algorithm are the reference linear velocity , the look ahead distance , and the minimum distance from the robot to the target point. More details about the Pure Pursuit algorithm will be given in Section 3.3.
- The reference linear velocities are injected to linear velocity PI controllers to generate the velocity control actions . These PI controllers are used to reduce the negative effect that may cause dead-zones and possible external disturbances over the reference linear velocities. The vehicle inverse kinematics block transforms the velocity control actions into dynamic references .
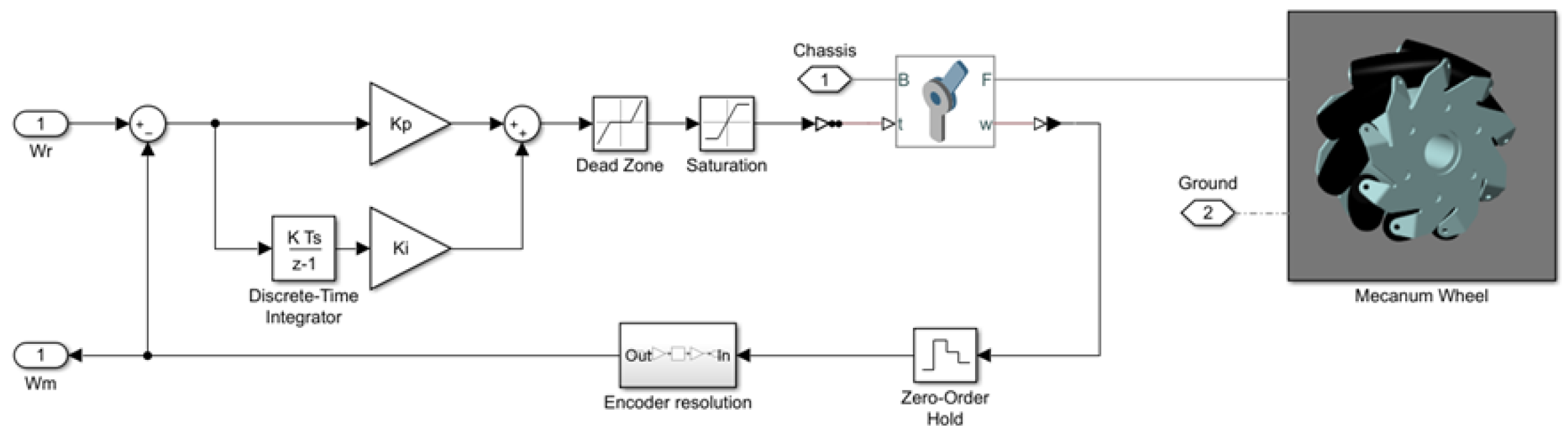
- From these dynamic references , the internal dynamic PI controller (included in the robot simulator) computes the control signal to be applied to the vehicle. These control actions will be applied under Zero-Order Hold (ZOH) conditions.
- As a result, the robot outputs will be obtained. The vehicle is equipped with a virtual beacon. Four fixed beacons are additionally placed on the walls of the simulation environment, emulating a beacon-based indoor positioning system. The measurements are the distances between the virtual mobile beacon and the four fixed beacons, which are located in a known place with respect to the world system of the simulator.
- Any vehicle output measurement , may be disturbed by Gaussian noise, which will be created from a set of independent seeds in order to generate a reproducible pseudorandom noise. As a consequence, the experiments developed with the simulator will be reproducible under the same conditions.
- In addition, each of the position distances may be individually lost according to a pseudorandom uniform probability distribution with loss probability . When a position distance is lost, ; otherwise, .
- The system state estimate is computed via the NUDREKF. The prediction step is generated at period T from the odometry measurements . The correction step is also obtained at period T, but from data sensed at the two different periods—that is, and . More details about the proposed NUDREKF can be found in Section 3.2.
3. Mathematical Foundations
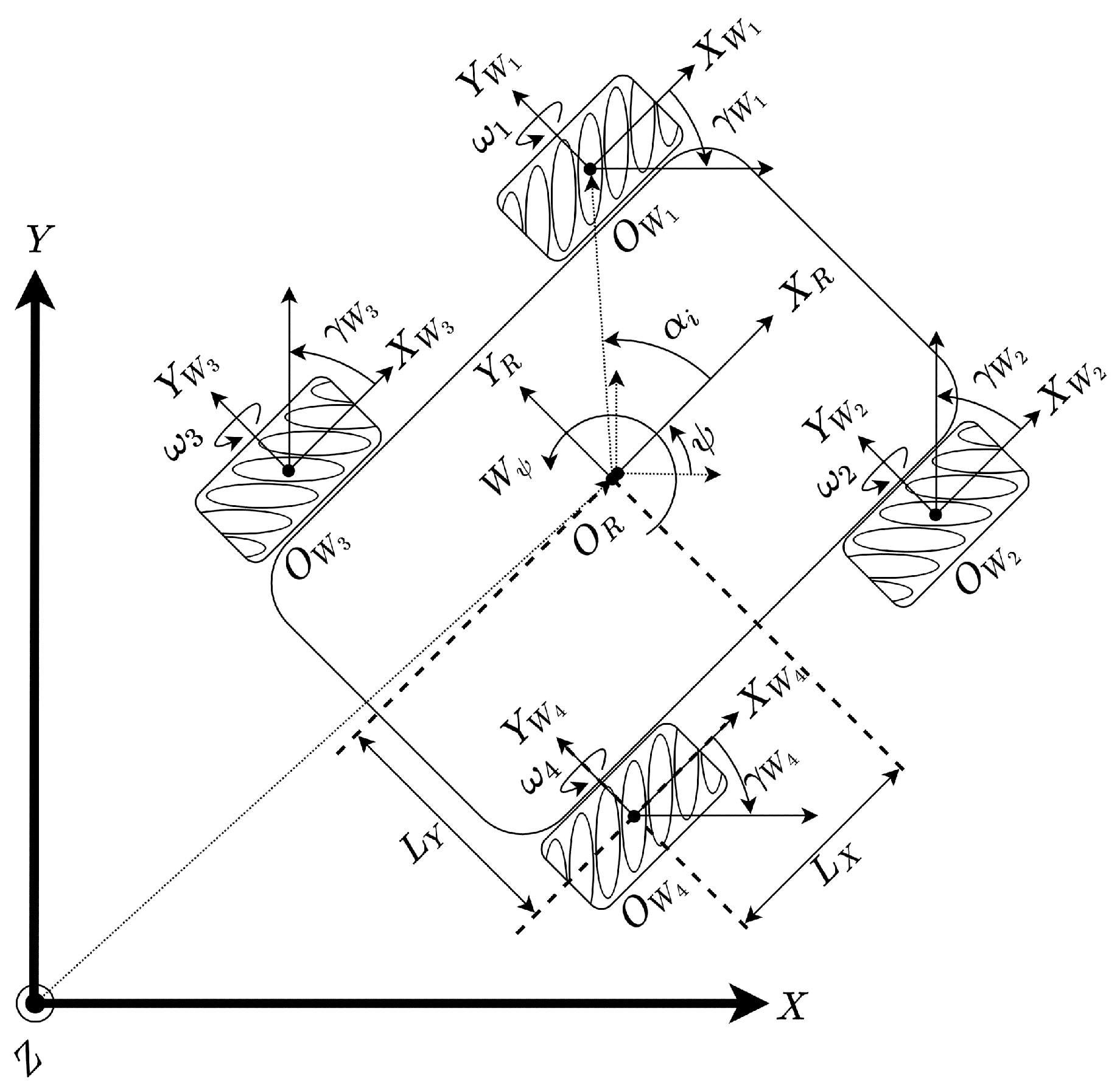
3.1. Kinematic and Dynamic Vehicle Modeling
3.2. Non-Uniform Dual-Rate Extended Kalman Filter (NUDREKF)
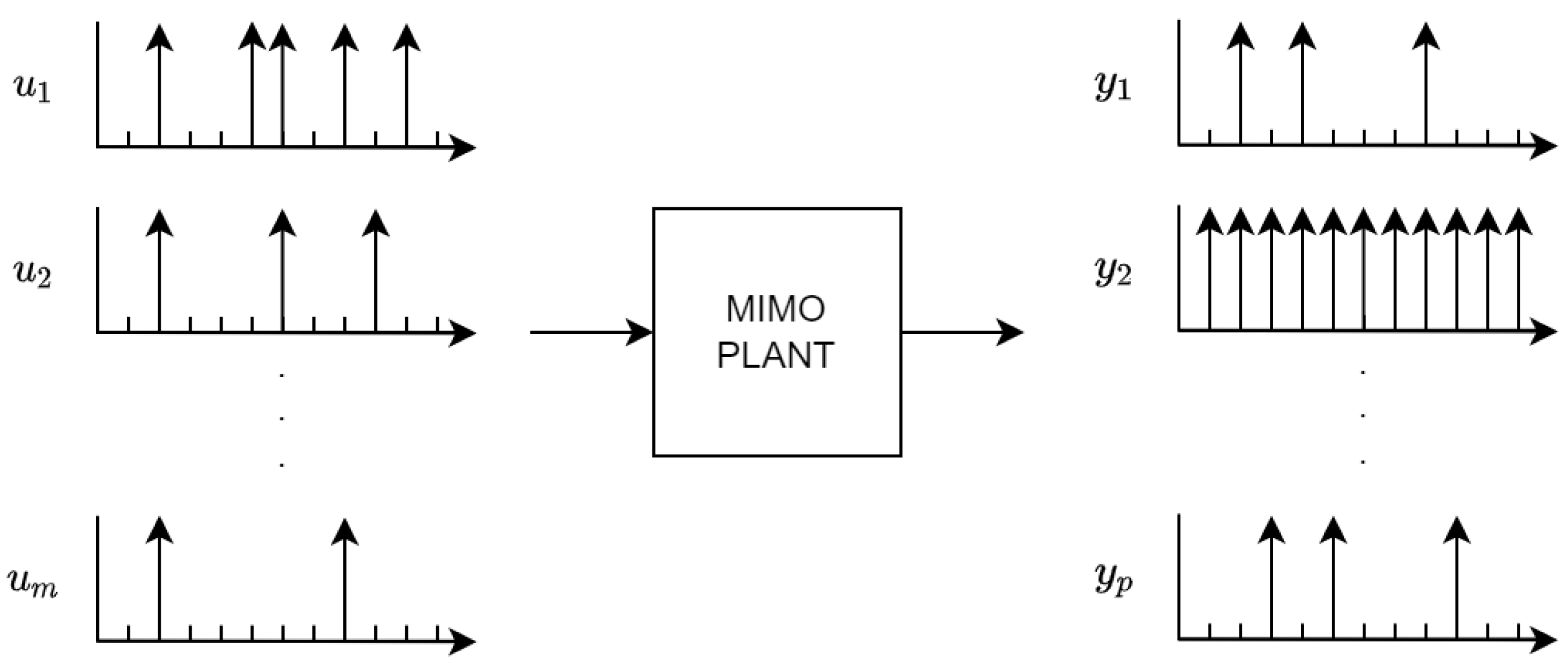
3.2.1. Nonuniform, Multirate, Sampled-Data System Modeling
3.2.2. Formulation of the NUDREKF
- Initialization:where denotes covariance, and denotes the expectation.
- Algorithm :where is the Kalman filter gain, and , are covariance matrices (see more details in Appendix A).
3.3. Pure Pursuit Algorithm
| Algorithm 1: Calculate |
|
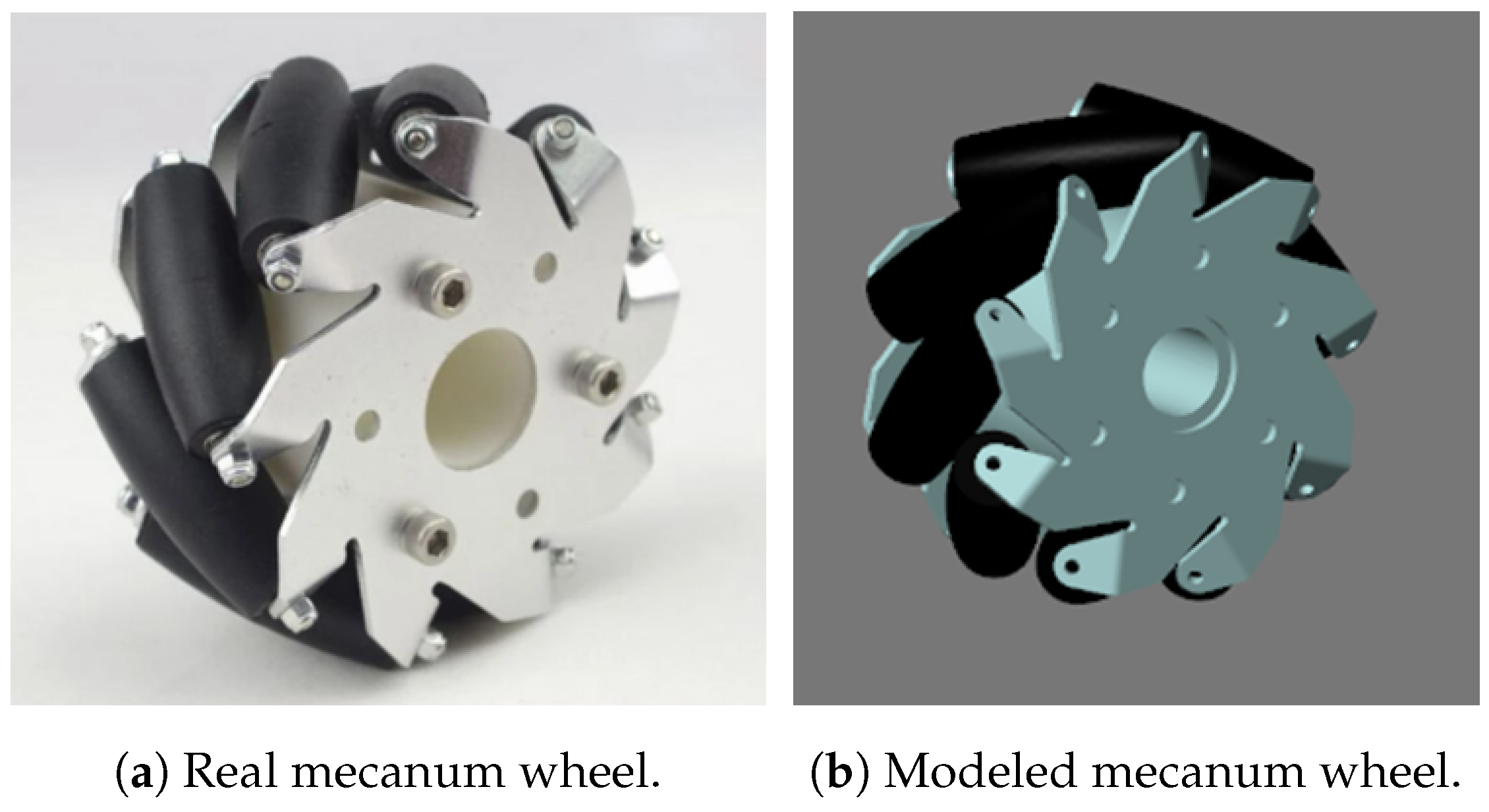
4. Four-Mecanum-Wheeled Mobile Platform
4.1. Simulation Tool
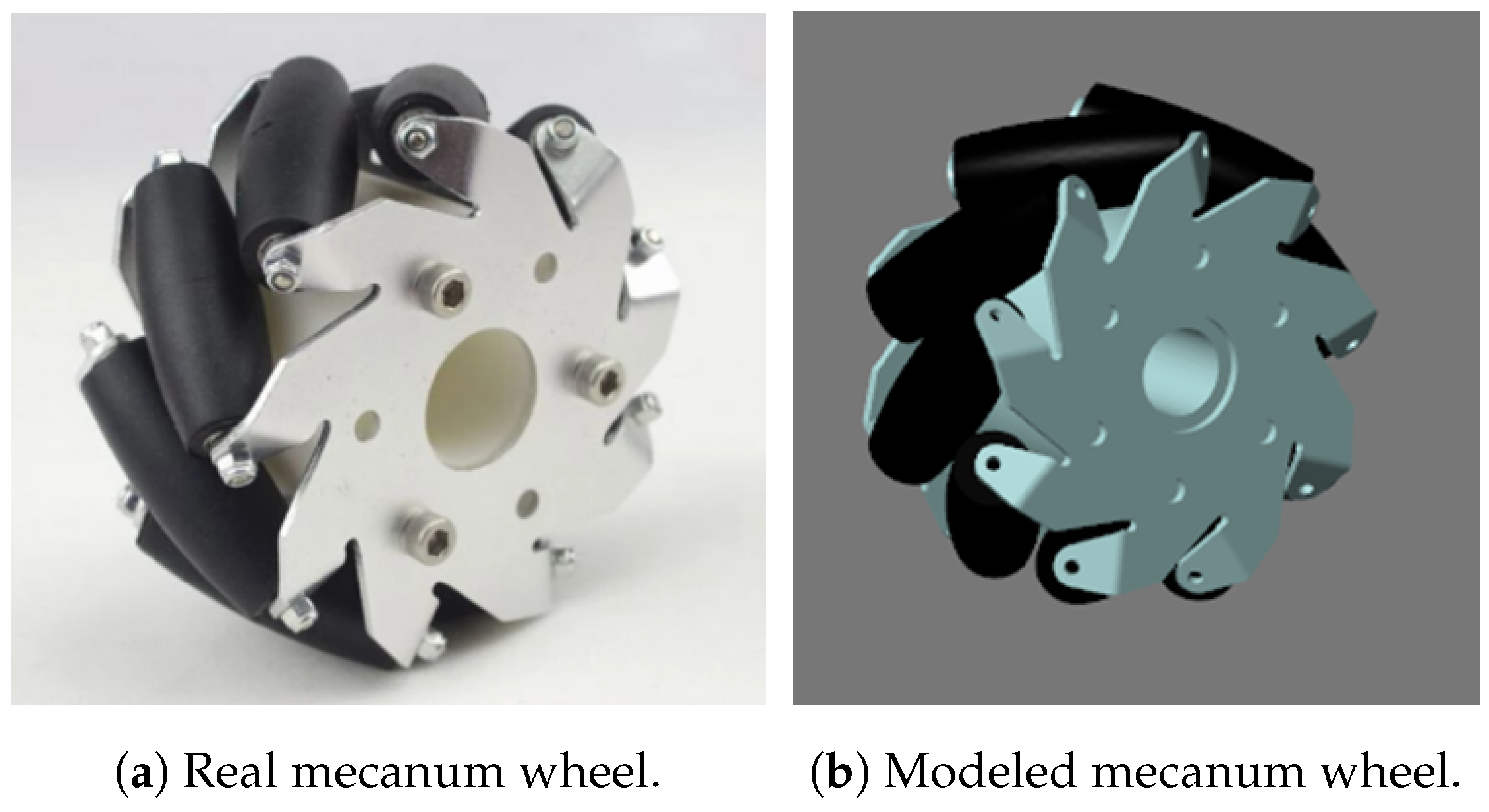
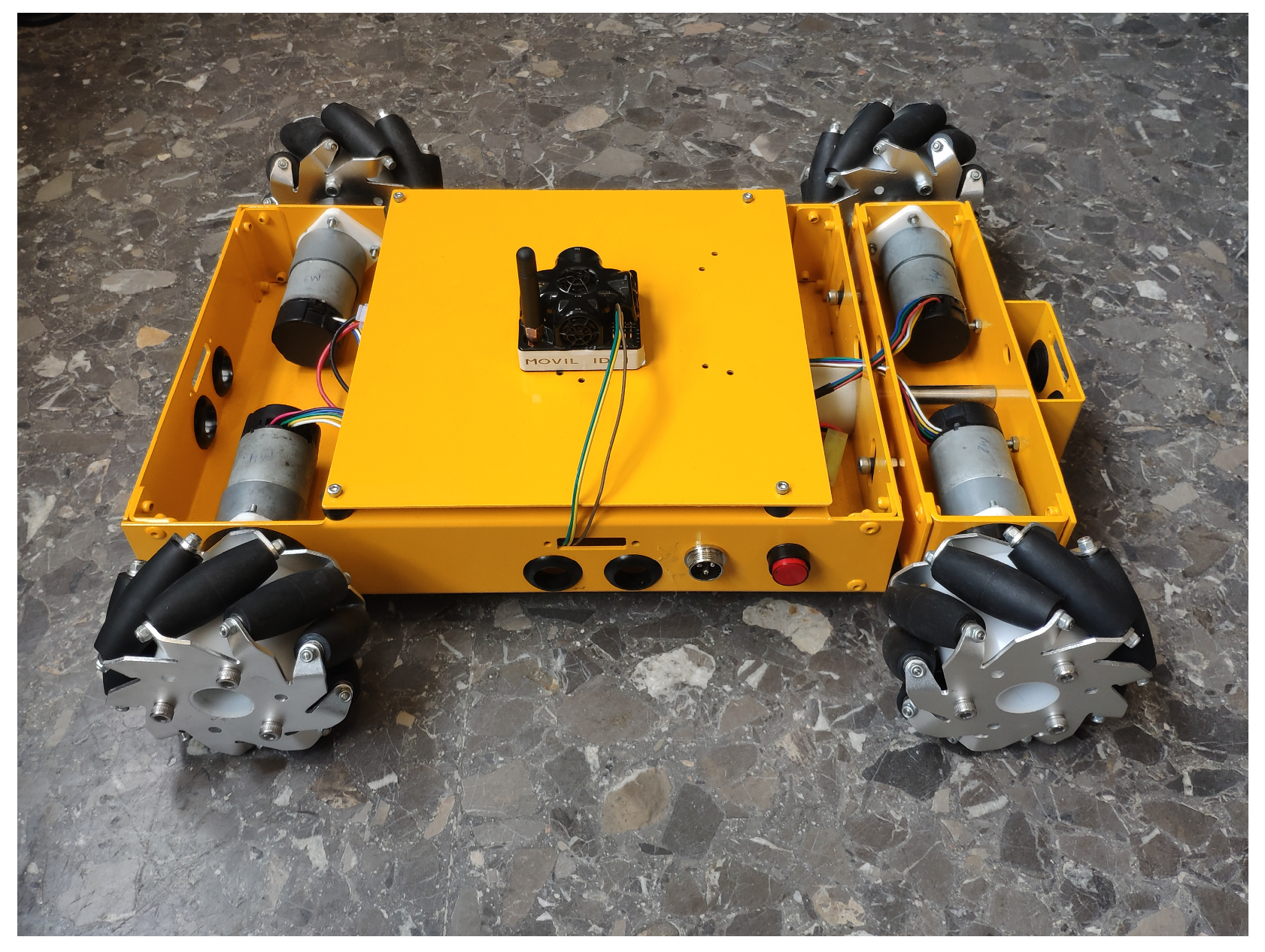
4.2. Real Platform
5. Simulation Results
5.1. Cases Evaluated
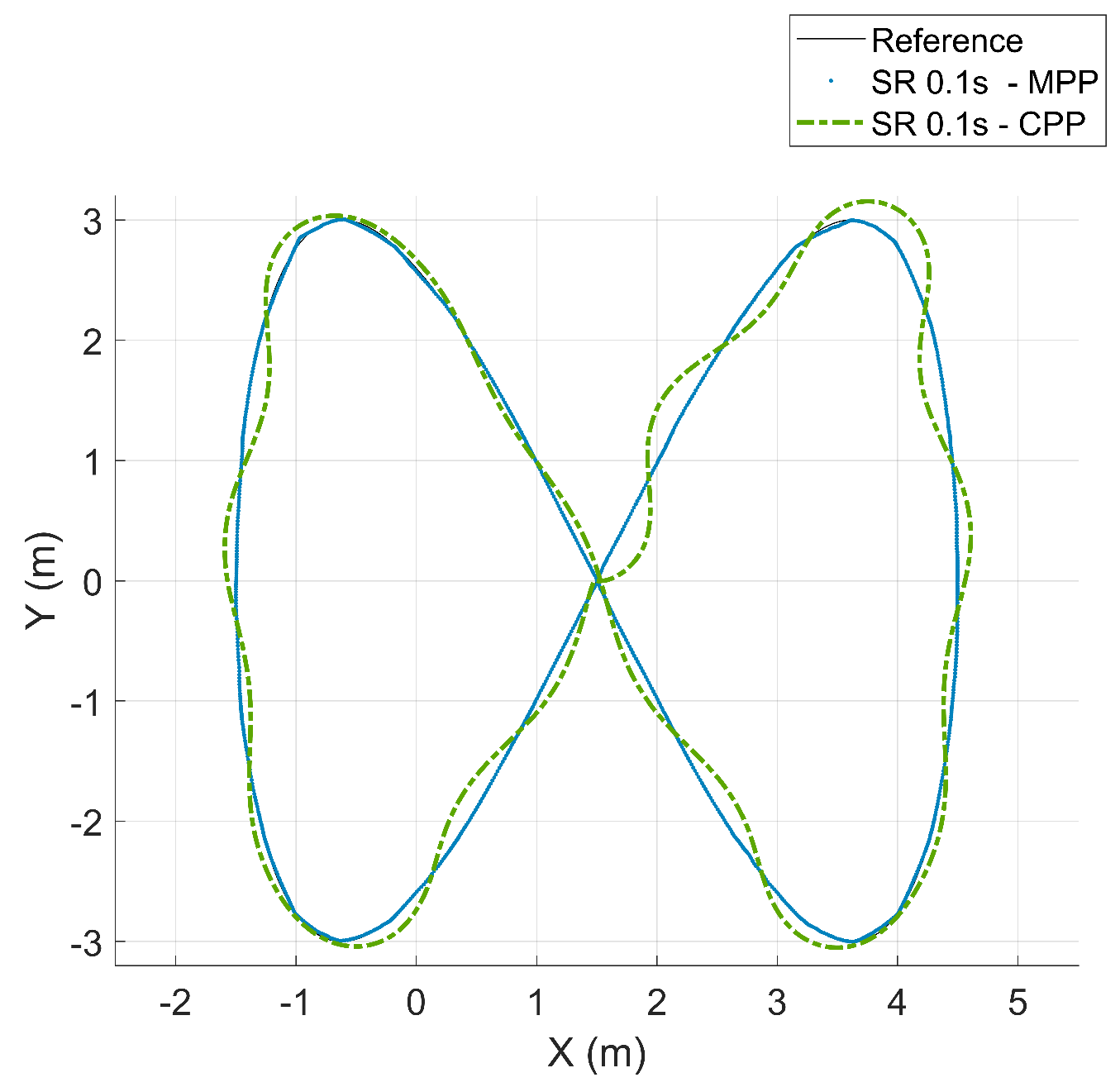
- Direct position, orientation, and angular velocity at single-rate T (SR): In this experiment, output measurements are directly sampled from the simulator block at different periods T = 0.1 s and T = 0.3 s. No noise is considered. In addition, for the case SR 0.1 s, the modified version of the Pure Pursuit path-tracking algorithm presented in this work is compared with the original method under the same conditions.
- Dual-rate Extended Kalman Filter (DREKF): This is the filter introduced in [23], which is used in the present work to be compared with the proposed NUDREKF. Gaussian noises are added to the robot outputs: distances , which are sensed at sampling period , being N = 10; velocities ; and vehicle orientation , which are sampled at period T = 0.1 s. Regarding possible losses of the distance values, three options for the loss probability P are simulated: , , and . Due to the nature of the DREKF, if one or more distances are lost at the current sensing time, the full set of distances will be considered lost.
- Nonuniform dual-rate extended Kalman filter (NUDREKF): This is the case presented in Section 3.2. The simulations are carried out under the same considerations as in the DREKF scenario; now, however, as the NUDREKF is able to face nonuniform sampling patterns, individual losses for each distance can be treated.
5.2. Cost Indexes for Performance Assessment
- , which is based on the -norm, and its goal is to provide a measure (in meters) about how accurately the path is followed:where l is the number of iterations at period T required by the vehicle to reach the final point of the path, is the current vehicle position, and is the nearest kinematic position reference to the current vehicle position. It is worth noting that, despite using a dual-rate control scheme, the position data may be available at period T (intersample behavior; see, e.g., [40]) in the simulator environment.
- , which is based on the -norm and is defined to know the maximum difference (in meters) between the desired path and the current vehicle position:
- , which measures the total amount of time (in seconds) elapsed to arrive at the final destination:
- , which is based on the -norm, and its goal is to provide a measure (in meters) about how accurately the estimation is made:where is the estimated vehicle position.
5.3. Results
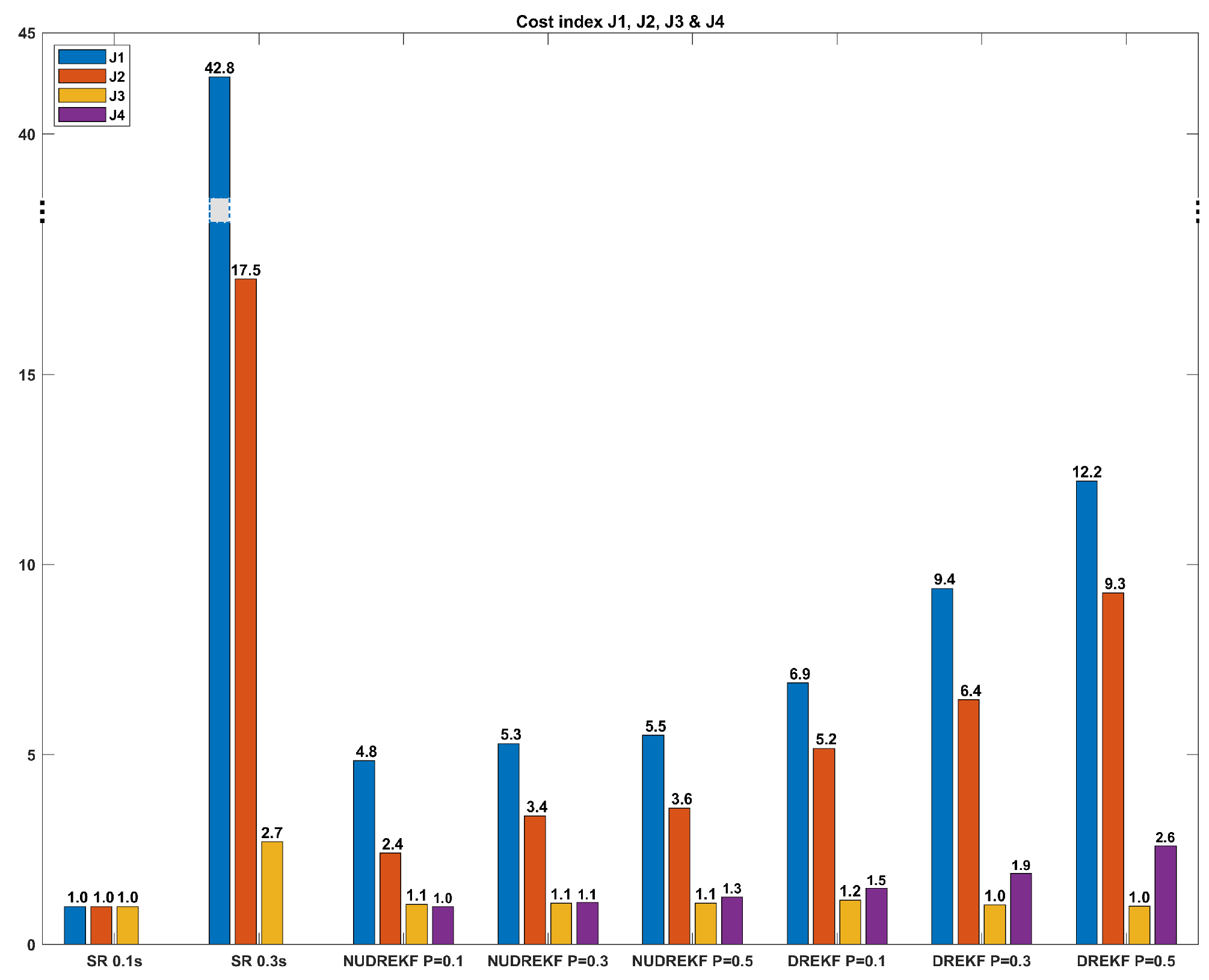
- Cost index presents values very similar to the nominal one for every case, except for SR 0.3 s—that is, the case where direct measurements are sensed at sampling period T = 0.3 s, which has a value 2.7 times higher.
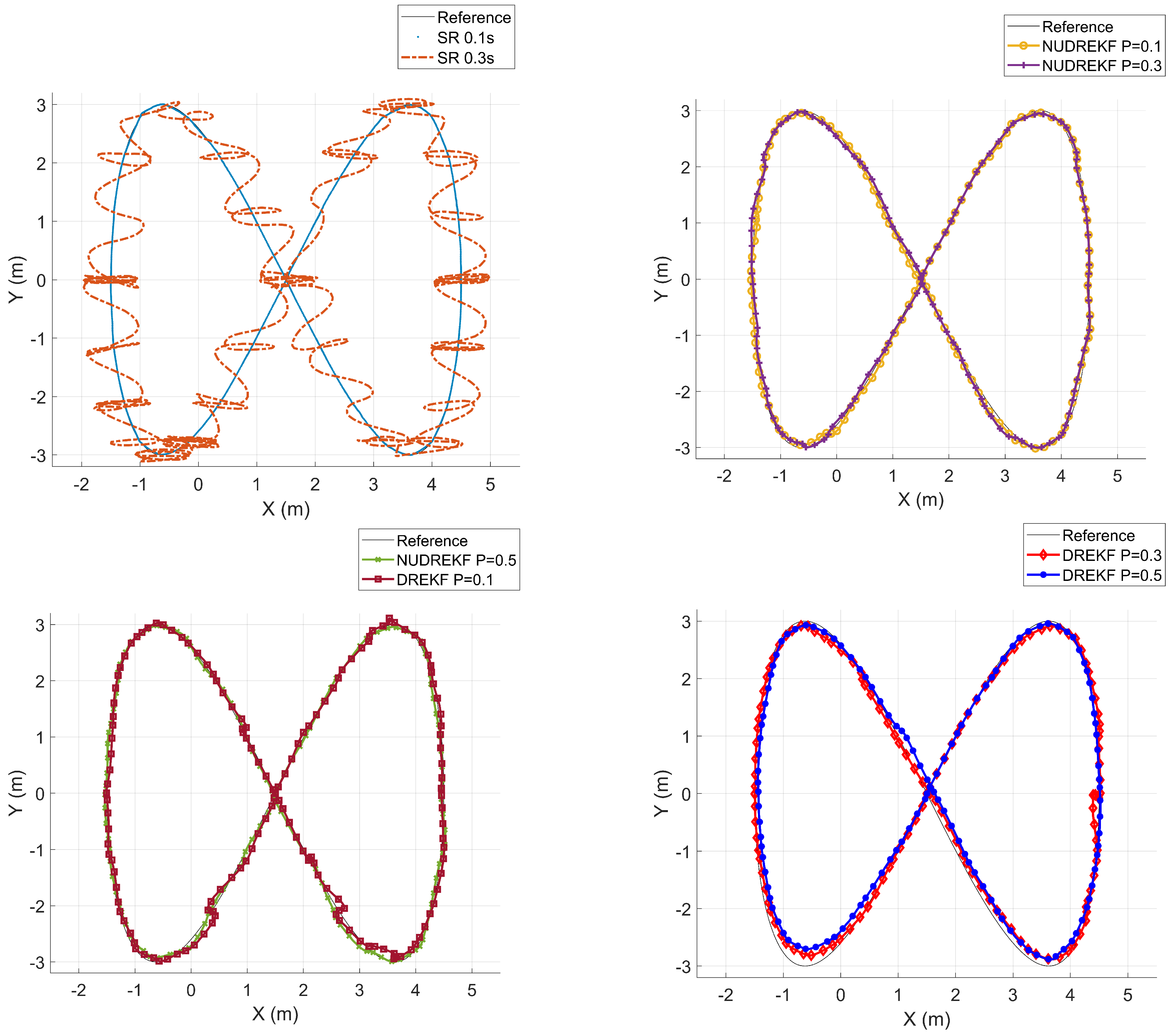
- SR 0.3 s shows the worst behavior (noticeable oscillations), which is confirmed by the clear rise of every cost index. On average, and increase their values by and times, respectively.
- In general, the NUDREKF cost indices are lower than the DREKF cost indices when appearing in nonuniform sampling patterns, beyond managing noisy and scarce data, and existing process nonlinearities. As can be seen in Figure 14, the higher P is, the worse the cost value will be. This rule is more evident for the DREKF. Note that the worst case for NUDREKF—that is, when = 0.5—presents lower , , and than the best case for DREKF—that is, when = 0.1.
- NUDREKF = 0.1 shows accurate path tracking, despite having scarce position measurements (10 less times), and assuming dropouts, noise, and nonlinearities. The cost indexes confirm the achievement of satisfactory control properties, since and are slightly worsened with respect to the nominal case (4.8 and 2.4 times higher, respectively). NUDREKF = 0.3 shows slightly worse path tracking with respect to NUDREKF = 0.1, increasing 0.5, 1, and 0.3 points in , , and , respectively. NUDREKF = 0.5 worsens the path-tracking behavior a bit more regarding NUDREKF = 0.1, and increases 0.7, 1.2, and 0.5 points in , , and , respectively. In summary, the NUDREKF strategy preserves a satisfactory trajectory tracking performance under conditions of loss of measurements.
- In contrast, DREKF = 0.1 shows slightly worse path tracking with respect to NUDREKF = 0.5, and quite worse behavior regarding NUDREKF = 0.1. As can be seen in Figure 15, DREKF = 0.3 and DREKF = 0.5 seem to achieve good path tracking; however, the correction of the position is taken only a few times and it is generally based on odometry measurements, obtaining poor performance on the cost index , and . If the experiment were extended over time, the tracking would suffer from drift in the estimation of the robot.
- Figure 16 depicts the path-tracking trajectory error for the different cases evaluated. As expected (see Figure 16a), SR 0.1 s presents the lowest error, being practically null except for the four slight spikes corresponding to the four curves of the trajectory, and SR 0.3 s shows the highest error, which reaches up to 0.6 m. Between both single-rate cases, the error value for the dual-rate approaches can be found. As can be seen in Figure 16b,c, NUDREKF cases depict lower error (up to 0.1 m) than DREKF cases (which can reach up to 0.3 m). This fact confirms the previous conclusions about the improvement introduced by the nonuniform sampling strategy.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| ABS | Antilock braking system |
| CAD | Computer-Aided Design |
| CPR | Counts per revolution |
| DOF | Degree of freedom |
| DREKF | Dual-rate extended Kalman filter |
| GPS | Global Positioning System |
| GR | Gear ratio |
| LIDAR | Light Detection and Ranging of Laser Imaging Detection and Ranging |
| MIMO | Multiple-input multiple-output |
| NC | Number of counts |
| NUDREKF | Nonuniform dual-rate extended Kalman filter |
| PI | Proportional–Integral |
| SR | Single-rate |
| ZOH | Zero-Order Hold |
Appendix A. Covariance Matrices and
References
- Safar, M.J.A. Holonomic and omnidirectional locomotion systems for wheeled mobile robots: A review. J. Teknol. 2015, 77, 91–97. [Google Scholar]
- Wang, C.; Liu, X.; Yang, X.; Hu, F.; Jiang, A.; Yang, C. Trajectory tracking of an omni-directional wheeled mobile robot using a model predictive control strategy. Appl. Sci. 2018, 8, 231. [Google Scholar] [CrossRef] [Green Version]
- Wada, M.; Mori, S. Holonomic and omnidirectional vehicle with conventional tires. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MI, USA, 22–28 April 1996; Volume 4, pp. 3671–3676. [Google Scholar]
- Doroftei, I.; Grosu, V.; Spinu, V. Omnidirectional Mobile Robot-Design and Implementation; INTECH Open Access Publisher: London, UK, 2007. [Google Scholar]
- Ilon, B.E. Wheels for a Course Stable Selfpropelling Vehicle Movable in Any Desired Direction on the Ground or Some Other Base. U.S. Patent 3,876,255, 8 April 1975. [Google Scholar]
- Adăscăliţei, F.; Doroftei, I. Practical applications for mobile robots based on mecanum wheels-a systematic survey. Rom. Rev. Precis. Mech. Opt. Mechatron. 2011, 40, 21–29. [Google Scholar]
- Xie, L.; Scheifele, C.; Xu, W.; Stol, K.A. Heavy-duty omni-directional Mecanum-wheeled robot for autonomous navigation: System development and simulation realization. In Proceedings of the 2015 IEEE International Conference on Mechatronics (ICM), Nagoya, Japan, 6–8 March 2015; pp. 256–261. [Google Scholar]
- Aguiar, A.P.; Hespanha, J.P. Trajectory-tracking and path-following of underactuated autonomous vehicles with parametric modeling uncertainty. IEEE Trans. Autom. Control 2007, 52, 1362–1379. [Google Scholar] [CrossRef] [Green Version]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking Algorithm; Technical Report; Carnegie-Mellon UNIV Pittsburgh PA Robotics INST: Pittsburgh, PA, USA, 1992. [Google Scholar]
- Fue, K.; Porter, W.; Barnes, E.; Li, C.; Rains, G. Autonomous Navigation of a Center-Articulated and Hydrostatic Transmission Rover using a Modified Pure Pursuit Algorithm in a Cotton Field. Sensors 2020, 20, 4412. [Google Scholar] [CrossRef] [PubMed]
- Mitchell, S.; Sajjad, I.; Al-Hashimi, A.; Dadras, S.; Gerdes, R.M.; Sharma, R. Visual distance estimation for pure pursuit based platooning with a monocular camera. In Proceedings of the 2017 American Control Conference (ACC), Seattle, WA, USA, 24–26 May 2017; pp. 2327–2332. [Google Scholar]
- Chopp, D.J.; Spike, N.; Bos, J.; Robinette, D. Multi point pure pursuit. In Proceedings of the Autonomous Systems: Sensors, Processing, and Security for Vehicles and Infrastructure 2020, International Society for Optics and Photonics, Online, 27 April–8 May 2020; Volume 11415, p. 1141505. [Google Scholar]
- Gámez Serna, C.; Lombard, A.; Ruichek, Y.; Abbas-Turki, A. GPS-based curve estimation for an adaptive pure pursuit algorithm. In Proceedings of the Mexican International Conference on Artificial Intelligence, Cancun, Mexico, 23–28 October 2016; pp. 497–511. [Google Scholar]
- Wang, H.; Chen, X.; Chen, Y.; Li, B.; Miao, Z. Trajectory tracking and speed control of cleaning vehicle based on improved pure pursuit algorithm. In Proceedings of the 2019 Chinese Control Conference (CCC), Guangzhou, China, 27–30 July 2019; pp. 4348–4353. [Google Scholar]
- Ohta, H.; Akai, N.; Takeuchi, E.; Kato, S.; Edahiro, M. Pure pursuit revisited: Field testing of autonomous vehicles in urban areas. In Proceedings of the 2016 IEEE 4th International Conference on Cyber-Physical Systems, Networks, and Applications (CPSNA), Nagoya, Japan, 6–7 October 2016; pp. 7–12. [Google Scholar]
- Haykin, S. Kalman Filtering and Neural Networks; Wiley Online Library: Hoboken, NJ, USA, 2001. [Google Scholar]
- Welch, G.; Bishop, G. An Introduction to the Kalman Filter; University of North Carolina: Chapel Hill, NC, USA, 2006; Volume 378. [Google Scholar]
- Simon, D. Optimal State Estimation: Kalman, H Infinity, and Nonlinear Approaches; John Wiley & Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Garcia, R.; Pardal, P.; Kuga, H.; Zanardi, M. Nonlinear filtering for sequential spacecraft attitude estimation with real data: Cubature Kalman Filter, Unscented Kalman Filter and Extended Kalman Filter. Adv. Space Res. 2019, 63, 1038–1050. [Google Scholar] [CrossRef]
- Grillo, C.; Vitrano, F. State estimation of a nonlinear unmanned aerial vehicle model using an Extended Kalman Filter. In Proceedings of the 15th AIAA International Space Planes and Hypersonic Systems and Technologies Conference, Dayton, OH, USA, 28 April–1 May 2008; p. 2529. [Google Scholar]
- Mora, M.C.; Piza, R.; Tornero, J. Multirate obstacle tracking and path planning for intelligent vehicles. In Proceedings of the 2007 IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 172–177. [Google Scholar]
- Salt Ducajú, J.M.; Salt Llobregat, J.J.; Cuenca, Á.; Tomizuka, M. Autonomous Ground Vehicle Lane-Keeping LPV Model-Based Control: Dual-Rate State Estimation and Comparison of Different Real-Time Control Strategies. Sensors 2021, 21, 1531. [Google Scholar] [CrossRef] [PubMed]
- Carbonell, R.; Cuenca, Á.; Casanova, V.; Pizá, R.; Salt Llobregat, J.J. Dual-Rate Extended Kalman Filter Based Path-Following Motion Control for an Unmanned Ground Vehicle: Realistic Simulation. Sensors 2021, 21, 7557. [Google Scholar] [CrossRef]
- Gopalakrishnan, A.; Kaisare, N.S.; Narasimhan, S. Incorporating delayed and infrequent measurements in Extended Kalman Filter based nonlinear state estimation. J. Process Control 2011, 21, 119–129. [Google Scholar] [CrossRef]
- Wang, J.; Alipouri, Y.; Huang, B. Multirate Sensor Fusion in the Presence of Irregular Measurements and Time-Varying Time Delays Using Synchronized, Neural, Extended Kalman Filters. IEEE Trans. Instrum. Meas. 2021, 71, 1–9. [Google Scholar] [CrossRef]
- Szántó, A.; Hajdu, S. Vehicle Modelling and Simulation in Simulink. Int. J. Eng. Manag. Sci. 2019, 4, 260–265. [Google Scholar] [CrossRef]
- Crenganiş, M.; Breaz, R.E.; Racz, S.G.; Biriş, C.M.; Gîrjob, C.E.; Maroşan, A.I. Development of a lightweight multipurpose high mobility vehicle for use in confined spaces. In Proceedings of the 2021 International Automatic Control Conference (CACS), Qingdao, China, 17–21 July 2021; pp. 1–6. [Google Scholar]
- Arora, R.; Singh, R. Physical Modeling of the Tread Robot and Simulated on Even and Uneven Surface. In Proceedings of the International Conference on Intelligent Systems Design and Applications, Vellore, India, 6–8 December 2018; pp. 173–181. [Google Scholar]
- Vitolo, F.; Rega, A.; Di Marino, C.; Pasquariello, A.; Zanella, A.; Patalano, S. Mobile Robots and Cobots Integration: A Preliminary Design of a Mechatronic Interface by Using MBSE Approach. Appl. Sci. 2022, 12, 419. [Google Scholar] [CrossRef]
- Dosoftei, C.; Horga, V.; Doroftei, I.; Popovici, T.; Custura, Ş. Simplified Mecanum Wheel Modelling using a Reduced Omni Wheel Model for Dynamic Simulation of an Omnidirectional Mobile Robot. In Proceedings of the International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 22–23 October 2020; pp. 721–726. [Google Scholar]
- Bayar, G.; Ozturk, S. Investigation of the effects of contact forces acting on rollers of a mecanum wheeled robot. Mechatronics 2020, 72, 102467. [Google Scholar] [CrossRef]
- Siegwart, R.; Nourbakhsh, I.; Scaramuzza, D. Introduction to Autonomous Mobile Robots, 2nd ed.; MIT Press: Cambridge, MA, USA, 2011. [Google Scholar]
- Diegel, O.; Badve, A.; Bright, G.; Potgieter, J.; Tlale, S. Improved mecanum wheel design for omni-directional robots. In Proceedings of the 2002 Australasian Conference on Robotics and Automation, Auckland, New Zealand, 27–29 November 2002; pp. 117–121. [Google Scholar]
- Tornero, J.; Tomizuka, M.; Camina, C.; Ballester, E.; Piza, R. Design of dual-rate PID controllers. In Proceedings of the 2001 IEEE International Conference on Control Applications (CCA’01) (Cat. No.01CH37204), Mexico City, Mexico, 7 September 2001; pp. 859–865. [Google Scholar] [CrossRef]
- Tornero, J.; Piza, R.; Albertos, P.; Salt, J. Multirate LQG controller applied to self-location and path-tracking in mobile robots. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No. 01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 2, pp. 625–630. [Google Scholar] [CrossRef]
- Pizá, R.; Tornero, J.; Tomizuka, M. Self-localization and path-tracking in mobile robots. Dual-rate Kalman filtering. In Proceedings of the International Conference on Systems Identification and Control Problems, Moscow, Russia, 26–28 September 2000. [Google Scholar]
- Tornero, J. Non-Conventional Sampled Data Systems Modelling; Control System Centre Report nº 640/1985; University of Manchester (UMIST): Manchester, UK, 1985. [Google Scholar]
- Longhi, S. Structural properties of multirate sampled-data systems. IEEE Trans. Autom. Control 1994, 39, 692–696. [Google Scholar] [CrossRef]
- Kawabata, K.; Ma, L.; Xue, J.; Zhu, C.; Zheng, N. A path generation for automated vehicle based on Bezier curve and via-points. Robot. Auton. Syst. 2015, 74, 243–252. [Google Scholar] [CrossRef]
- Salt, J.; Albertos, P. Model-based multirate controllers design. IEEE Trans. Control. Syst. Technol. 2005, 13, 988–997. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SR 0.1 s—Modified Pure Pursuit (MPP) | 1.0 | 1.0 | 1.0 |
| SR 0.1 s—Conventional Pure Pursuit (CPP) | 14.3 | 6.96 | 0.79 |
| SR 0.1 s | 1.0 | 1.0 | 1.0 | - |
| SR 0.3 s | 42.8 | 17.5 | 2.7 | - |
| NUDREKF = 0.1 | 4.8 | 2.4 | 1.1 | 1.0 |
| NUDREKF = 0.3 | 5.3 | 3.4 | 1.1 | 1.1 |
| NUDREKF = 0.5 | 5.5 | 3.6 | 1.1 | 1.3 |
| DREKF = 0.1 | 6.9 | 5.2 | 1.2 | 1.5 |
| DREKF = 0.3 | 9.4 | 6.4 | 1.0 | 1.9 |
| DREKF = 0.5 | 12.2 | 9.3 | 1.0 | 2.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pizá, R.; Carbonell, R.; Casanova, V.; Cuenca, Á.; Salt Llobregat, J.J. Nonuniform Dual-Rate Extended Kalman-Filter-Based Sensor Fusion for Path-Following Control of a Holonomic Mobile Robot with Four Mecanum Wheels. Appl. Sci. 2022, 12, 3560. https://doi.org/10.3390/app12073560
Pizá R, Carbonell R, Casanova V, Cuenca Á, Salt Llobregat JJ. Nonuniform Dual-Rate Extended Kalman-Filter-Based Sensor Fusion for Path-Following Control of a Holonomic Mobile Robot with Four Mecanum Wheels. Applied Sciences. 2022; 12(7):3560. https://doi.org/10.3390/app12073560
Chicago/Turabian StylePizá, Ricardo, Rafael Carbonell, Vicente Casanova, Ángel Cuenca, and Julián J. Salt Llobregat. 2022. "Nonuniform Dual-Rate Extended Kalman-Filter-Based Sensor Fusion for Path-Following Control of a Holonomic Mobile Robot with Four Mecanum Wheels" Applied Sciences 12, no. 7: 3560. https://doi.org/10.3390/app12073560
APA StylePizá, R., Carbonell, R., Casanova, V., Cuenca, Á., & Salt Llobregat, J. J. (2022). Nonuniform Dual-Rate Extended Kalman-Filter-Based Sensor Fusion for Path-Following Control of a Holonomic Mobile Robot with Four Mecanum Wheels. Applied Sciences, 12(7), 3560. https://doi.org/10.3390/app12073560