1. Introduction
Aircraft shape optimization is one of the key problems in aerodynamic configuration design. The traditional aerodynamic optimization design methods mainly rely on experience and trial-and-error methods, which require a lot of human, material and financial resources, and not only take a long time but also require a lot of computational resources [
1]. In recent years, with the rapid development of computational fluid dynamics (CFD) technology, the combination of numerical methods and optimization algorithms for the aerodynamic shape optimization of aircraft can significantly shorten the development cycle and reduce the design cost [
2]. Therefore, it is important to carry out research on efficient aerodynamic optimization design methods based on the combination of CFD technology and optimization algorithms for the development of aerodynamic optimization design.
Among numerous aerodynamic optimization studies, gradient-based methods and heuristic algorithms are two of the most widely used methods. Gradient-based methods are particularly attractive due to their ability to significantly improve the efficiency of high-dimensional optimization problems. The adjoint method proposed by Jameson [
3] is an effective sensitivity analysis method that evaluates sensitivity information by solving the adjoint problem regardless of the number of design variables. Therefore, the computational time of sensitivity analysis can be significantly reduced. By combining the adjoint method with the gradient method, the optimization efficiency can be greatly improved. In recent years, this technique has been widely used in aerodynamic optimization [
4,
5]. However, two reasons make this technique less attractive: one is its difficulty in dealing with constrained/multi-objective problems, and the other is that it is easy for it to fall into local optima.
Heuristic algorithms do not need to rely on information about a specific problem and have good global performance in finding the optima; they are thus particularly suitable for solving problems with complex multiple local optima. Among them, genetic algorithms (GAs), differential evolution (DE) algorithm and particle swarm optimization (PSO) algorithm are the most popular methods in the field of aerodynamic optimization, and they have all been successfully applied in aerodynamic optimization [
6,
7,
8,
9]. However, their evolutionary procedures require multiple calls to the CFD analysers, which significantly increases the computational cost. Therefore, it is necessary to improve the optimal efficiency and therefore to develop optimization algorithms in particular allowing for balanced exploitation and exploration capabilities [
10].
Many engineering problems are complex high-dimensional multimodal problems, so that most algorithms converge slowly, easily fall into local optima and are inefficient in dealing with such problems. Aerodynamic optimization is a highly complex nonlinear problem with multi-parameter, high-dimensional and multimodal characteristics. In order to solve aerodynamic optimization problems effectively, it is undoubtedly necessary to develop new intelligent and knowledge-based algorithms with satisfactory performance. The genetic algorithm has good robustness and global search capability [
11,
12,
13,
14,
15], and can be well adapted to solve various types of problems. The cultural algorithm is a knowledge-based super-heuristic algorithm, and its unique two-layer evolutionary mechanism can improve the evolutionary efficiency very well. The hybrid of genetic algorithms and cultural algorithm can combine the advantages of both, and then solve aerodynamic optimization problems efficiently.
Cultural algorithm (CA) [
16] is an evolutionary algorithm based on the simulation of a two-layer evolutionary mechanism of human society, proposed by R.G. Reynolds in 1994. It was inspired by and developed from human sociology and aimed to model the evolution of the cultural component of evolutionary systems over time [
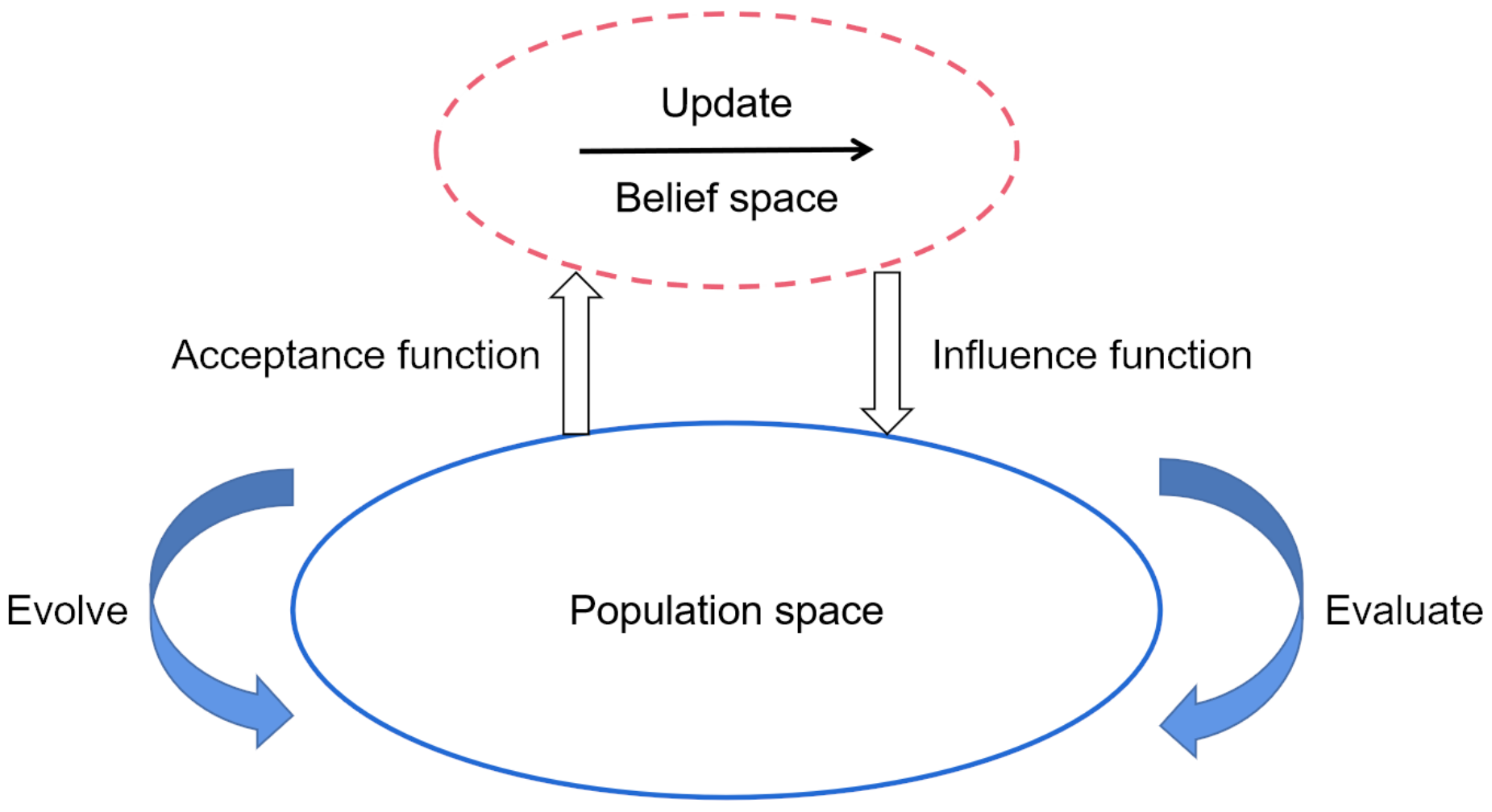
17]. CA simulates the development of society and culture, which can be divided into two parts, the population space and the belief space, which are independent from each other but interconnected through communication protocols. CA extracts the implicit information carried by the population evolution process, such as the location of the optimal individuals or the range of the best individuals, into the belief space and stores it in knowledge sources. CA provides a new framework and mechanism for evolutionary models or swarm intelligence systems [
18], such as genetic algorithms [
19], ant colony algorithms [
20], particle swarm algorithms [
21] and differential evolution [
22], etc. The two-layer evolutionary mechanism of CA improves the efficiency of the algorithm. Compared with other evolutionary algorithms, CA has stronger global optimization capability and higher optimization precision, and it has been successfully applied to optimization problems such as clustering analysis [
23], sensor localization [
24], multi-objective optimization [
25] and vehicle routing [
26]. Although the cultural algorithm can use knowledge sources to improve evolutionary efficiency, its global convergence and evolutionary efficiency are deficient due to its single mutation operator [
27]. Therefore, the cultural algorithm needs to be improved for better performance of the optimization.
In this paper, an efficient hybrid evolutionary optimization method coupling CA with GAs (HCGA) is introduced with a validation background of the application of evolutionary algorithms to aerodynamic optimization design. Considering the features of CA and GAs, the proposed algorithm reconstructs the framework of cultural algorithms, which uses GAs as a population space evolutionary model of the cultural framework, with the three types of knowledge, namely situational knowledge, normative knowledge and historical knowledge; these kinds of knowledge construct the knowledge sources of the belief space. In addition, HCGA introduces population variance and population entropy to determine population diversity, and it develops a new knowledge-guided t-mutation operator to dynamically adjust the mutation step based on the change of population diversity during the evolutionary process. It further introduces the t-mutation operator into the influence function to balance the exploration and exploitation ability of the algorithm and improve its optimization efficiency.
The rest of the paper is organized as follows. A brief introduction to the basic principles and framework of the cultural and genetic algorithms is given in
Section 2. The proposed algorithm HCGA is introduced in
Section 3. Numerical results and comparisons are presented and discussed in
Section 4.2. The HCGA is applied in
Section 5 to the aerodynamic optimization design of the wing cruise factor. Conclusions and perspectives are discussed in
Section 6.
3. The Hybrid Evolutionary Optimization Method Coupling CA with GAs
Cultural systems possess the ability to incorporate heterogeneous and diverse knowledge sources into their structures. As such, they are ideal frameworks within which to support hybrid amalgams of knowledge sources and population components [
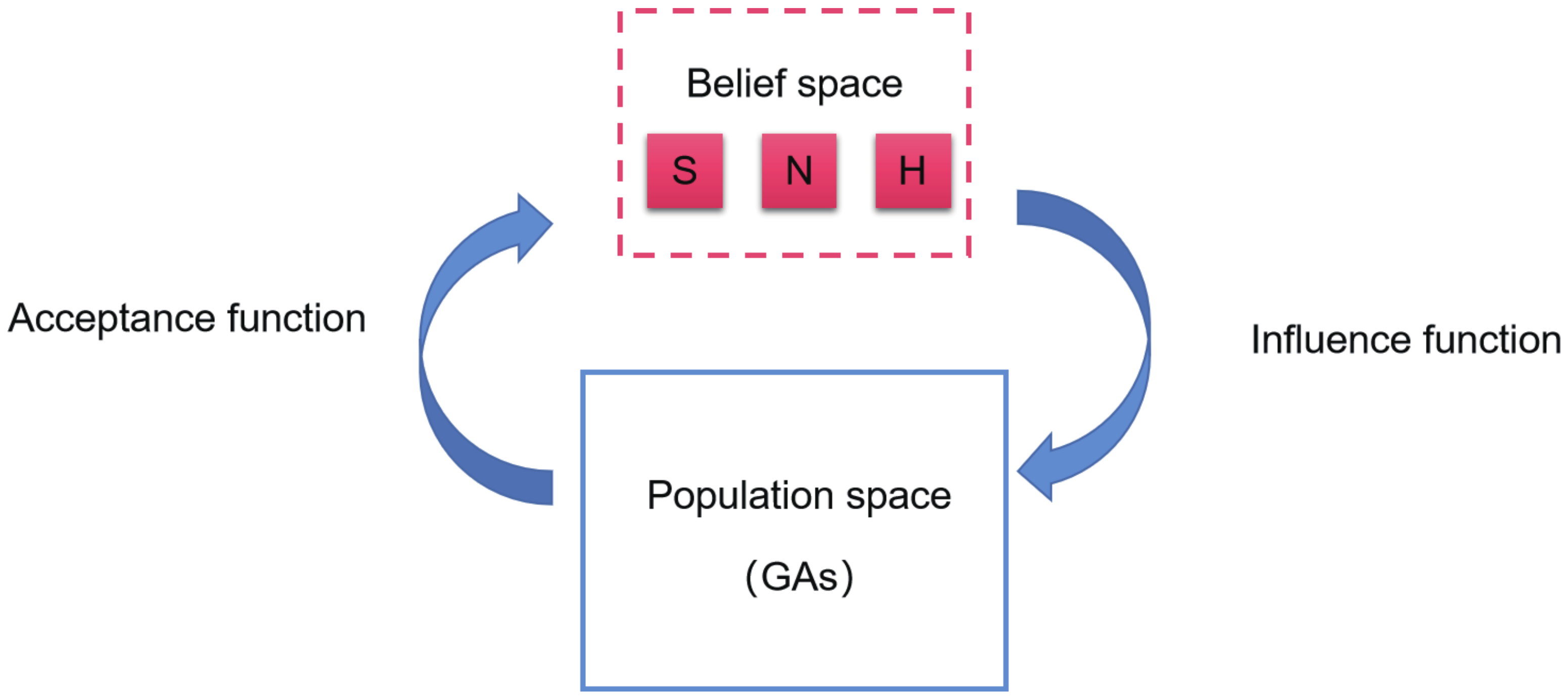
29]. In order to make full use of the advantages of CA and GAs, an efficient hybrid evolutionary optimization method coupling CA with GAs (HCGA) is proposed in this paper. The cultural framework of HCGA is shown in
Figure 3, which includes population space, belief space and communication protocol, whose population space is modeled using GAs, and belief space includes situational knowledge, normative knowledge and historical knowledge. In addition, HCGA introduces population entropy and population variance to judge population diversity, and a knowledge-guided
t-mutation operator is developed based on population diversity to balance the exploration and exploitation ability of the algorithm. In the remainder of this section, we describe each part of the HCGA in detail.
3.1. Population Space
In fact, the population space can support any population-based evolutionary algorithm or swarm intelligence algorithm, which can also interact and run simultaneously with the belief space. The standard cultural algorithm has only a single mutation operator in the population space, making its global convergence and exploration capability insufficient. The GAs has a strong global search capability and high robustness, which can effectively explore the search space with the increasing population convenience and global exploration capability of the algorithm, and thus the population space is evolved using the GAs in this paper. A detailed description of the genetic algorithms is given in
Section 2.2 and will not be repeated here.
3.2. Belief Space
In this paper, according to the characteristics of genetic algorithms, combined with the manner of extracting and updating knowledge sources in the belief space, the knowledge sources are divided into situational knowledge, normative knowledge and historical knowledge. The manner of updating the knowledge sources in the belief space every K generations is adopted, so that the memory consumption brought by redundant information can be reduced. Different knowledge sources have different update strategies. Taking the maximization problem as an example, the update of the knowledge sources is described as follows:
- (1)
Situational knowledge. Situational knowledge was proposed by Chung in 1997 [
30] to record the excellent individuals with a guiding role in the evolutionary process and is structured as follows:
where
is the
ith best individual, and in this paper the best individual is selected to update the situational knowledge, that is,
s = 1. The process of updating situational knowledge is described as follows:
where
is the best individual in the Tth generation of the population space.
- (2)
Normative knowledge. Normative knowledge was also proposed by Chung [
30] for limiting the search space and judging the feasibility of an individual. When an individual is outside the search space described by the normative knowledge, the normative knowledge will guide the individual into the dominant search space through the influence function, thus ensuring that evolution proceeds is in the dominant region, and for the
n-dimensional optimization problem, the structure of the normative knowledge is described as follows:
where
.
and
are the upper and lower bounds of the
ith dimensional variables, and
and
are the upper and lower bounds of the fitness value, respectively. The normative knowledge is updated with the change of the dominant search region, and gradually approaches the region where the best individual is located. Therefore, when there is a better individual in the
Tth generation beyond the current search range described by the normative knowledge, the normative knowledge is updated as follows:
- (3)
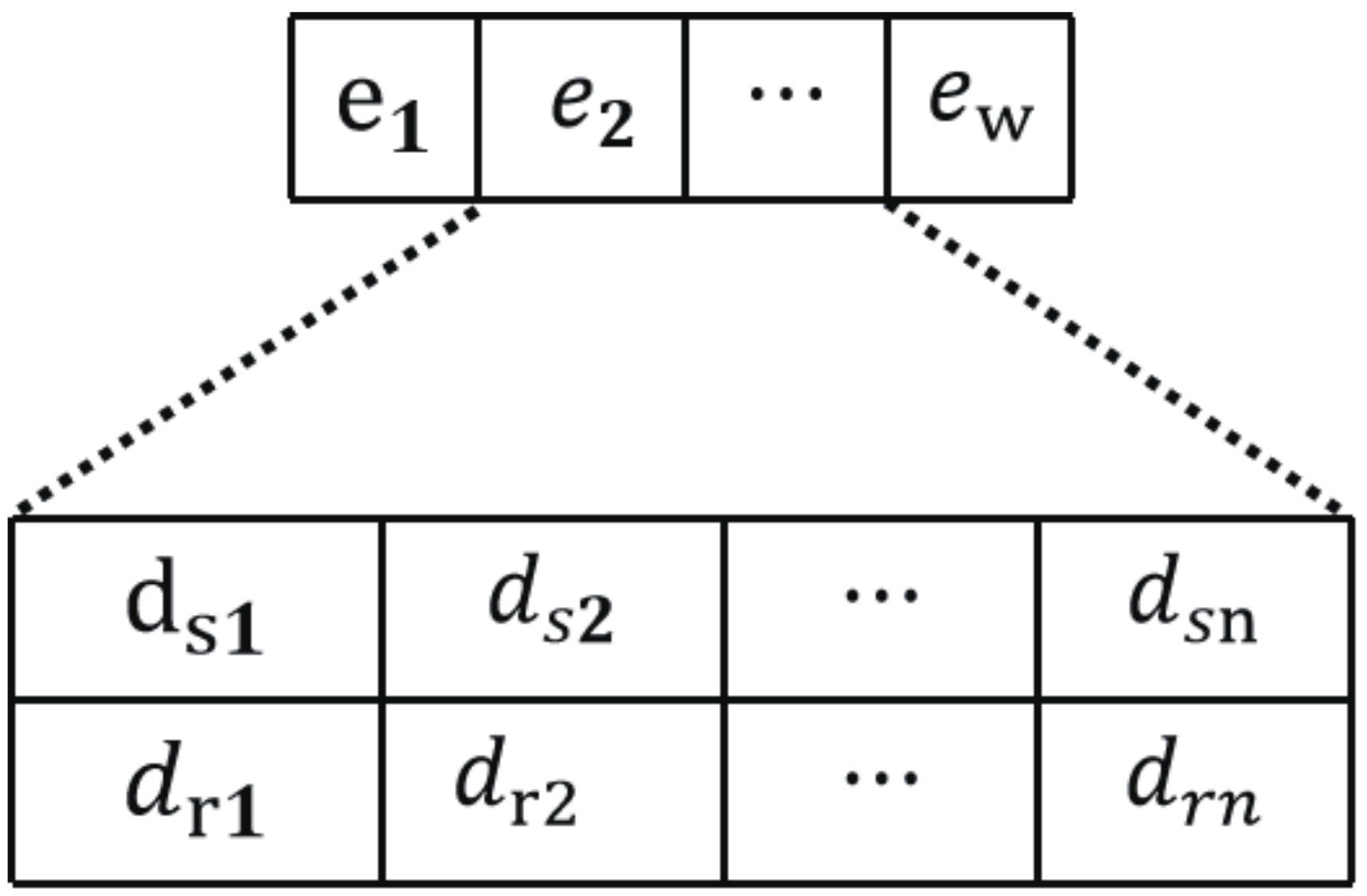
Historical knowledge. Historical knowledge was introduced into the belief space by Saleem [
31] to record important events that occurred during the evolutionary process, and its main role is to adjust the offset distance and direction when the optimization falls into a local optima. The historical knowledge structure is divided as shown in
Figure 4, where
is the
ith outstanding individual of historical knowledge preservation,
W is its maximum capacity, and
and
are the average offset distance and the average offset direction of the
jth design variable. The expressions of
and
are as follows:
3.3. Proposed t-Mutation Operator
Evolutionary algorithms require good exploration capabilities in the early stages and good exploitation capabilities in the later stages of evolution. The t distribution contains the degree of freedom parameter n, which approaches the standard Gaussian distribution infinitely when
and the t distribution is the standard Cauchy distribution when
. That is, the standard Gaussian distribution and the standard Cauchy distribution are two boundary special cases of the t distribution. The probability density functions of the standard Gaussian distribution and the standard Cauchy distribution are shown in
Figure 5. Obviously, the application of the Cauchy operator can produce a larger mutation step, which is conducive to the algorithm to guide individuals to jump out of the local optimal solution and ensure the exploration ability of the algorithm, and Gaussian distribution shows a better exploitation ability.
Population diversity is considered as the primary reason for premature convergence, which determines the search capability of the algorithm. In evolutionary algorithms, population diversity decreases over time as evolution proceeds. Therefore, population diversity can be used to determine the stage of evolution; we can thus use the population diversity to construct the degree of freedom n. By changing the degree of freedom parameter n, the mutation scale changes adaptively with evolution to balance the exploitation and exploration capabilities of the algorithm. In this paper, we introduce population variance and population entropy to determine population diversity. The expression of population variance
in the
Tth generation is as follows:
where
is the
jth gene value of the ith individual,
N is the number of populations and
l is the individual coding length. The expression of
is as follows:
The solution space
A of the optimization problem is divided equally into
L small spaces, and the number of individuals belonging to the ith space
in generation
T is
. The expression of population entropy
in the
Tth generation is as follows:
where
From the definitions of population variance and population entropy, it is clear that population variance reflects the degree of dispersion of individuals in the population and that population entropy reflects the number of individual types in the population. Therefore, the
t-mutation operator
can be constructed based on the population variance and population entropy. The degree of freedom parameter
n is expressed as follows:
where
is the least integer function, and
and
are the maximum values of population variance and population entropy, respectively. Obviously, the degree of freedom parameter n of the
t-mutation operator is 1 in the first generation and increases gradually as evolution proceeds, then the degree of freedom parameter
n converges to positive infinity in the late evolutionary stage, and the
t distribution becomes a standard Gaussian distribution. The
t-mutation operator can ensure the exploration capability of the algorithm in the early evolutionary stage and the exploitation capability of the algorithm in the late evolutionary stage.
3.4. Communication Protocol
The information interaction between the belief space and the population space is realized through the acceptance function and the influence function. The acceptance function passes the better individuals in the population space as samples to the belief space for knowledge sources extraction and update, and the influence function is the way to influence the population space by the belief space, which can use the knowledge sources in the belief space to guide the population space to complete and accelerate the evolution.
3.4.1. Acceptance Function
In this paper, a dynamic version of the acceptance function [
31] is used. The number of accepted individuals is given as follows:
where
is the least integer function,
T is the current generation,
N is the number of populations,
is the preset fixed proportion and
. In this paper, the acceptance function accepts
better individuals into the belief space. The dynamic acceptance function makes the number of individuals entering the belief space decrease with the depth of evolution, which increases the global search ability of the algorithm at the early stage of evolution, and reduces the number of individuals entering the belief space at the late stage of evolution because the population tends to converge and carries mostly similar information, which can maintain the diversity of knowledge sources and avoid the consumption of memory by redundant information.
3.4.2. Influence Function
The core of the influence function is the manner and proportion in which each type of knowledge affects the population. Knowledge acts on each type of influence function to control the number of individuals affected by each type of influence function. Therefore, the proportion by which each type of knowledge affects the population is the relative role that each type of influence function has in the population. The proportion of the effect of the influence function is determined by the success rate of the knowledge effect, and is expressed as follows:
It satisfies the condition that , where is the number of knowledge sources types, denotes the number of individuals influenced by knowledge k that are better than their parents in generation and denotes the number of individuals influenced by all knowledge sources that are better than their parents in generation . The success rate of knowledge sources influenced in the previous generation determines the proportion of the effect of each knowledge source in the next generation. In order to allow each kind of knowledge source to always have the possibility of being used, we took , ensuring that the lower bound of is 0.1 and the proportion of all knowledge sources in the first generation is the same, which is .
Next, we introduced the proposed t-mutation operator into the influence function to develop a knowledge-guided t-mutation strategy.
- (1)
Situational knowledge. Situational knowledge has a guiding role in the evolutionary process, and the effect of situational knowledge on the population space under the action of the
t-mutation operator is noted as follows:
where
is the
jth dimensional design variable of the ith individual,
is the
jth dimensional design variable of the newly generated
ith individual,
is a constant and
is the
jth dimensional design variable of the situational knowledge.
- (2)
Normative knowledge. The normative knowledge guides the population to search in the dominant region, and the effect of the normative knowledge on the population space under the action of the
t-mutation operator is noted as follows:
where
is a constant, and
and
are the upper and lower bounds of the
jth dimensional design variables preserved by the normative knowledge of the current generation belief space, respectively.
- (3)
Historical knowledge. Historical knowledge is used to adjust the offset distance and direction when the optimization is trapped in a local optima, and the effect of historical knowledge on the population space under the action of the
t-mutation operator is noted as follows:
where
is the jth dimensional design variable of the best individual ex stored in the historical knowledge and
and
are the upper and lower bounds, respectively. Here a roulette wheel is used to determine how new individuals are generated, with a
probability that individuals produce a bias in direction, a
probability that individuals produce a bias in distance and a
probability that new individuals are generated randomly within the entire search space [
32].
3.5. The Main Numerical Implementation of HCGA
The main numerical implementation of HCGA is described step-by-step as follows:
- Step 1:
Initialization of algorithm parameters (N, l, , , , , , K, , , , , p).
- Step 2:
Initializing the population space. The initial population in the population space is generated randomly within the lower and upper bounds of the design variables, and the fitness of each individual in the initial population is evaluated. Set current generation .
- Step 3:
Initializing the belief space. Situational knowledge is initialized to the best individual in the initial population. In the normative knowledge, and are initialized to , and and are initialized to the upper and lower bounds of the design variables. In the historical knowledge, is initialized to the best individual in the initial population, while the average offset distance and the average offset direction are initialized to 0.
- Step 4:
Updating the population space. Evaluate the fitness of each individual and update the individuals in the population space by the genetic operation (selection, crossover, mutation). Calculate the population variance and population entropy and update the degree of freedom parameter n.
- Step 5:
If the current generation T is divisible by K, then go to Step 6; otherwise go to Step 8.
- Step 6:
Acceptance operation. Individuals are selected from the population space as samples to be passed to the belief space, and the number of acceptances is determined according to Equation (
15).
- Step 7:
Updating the belief space. The update of knowledge in the belief space is performed according to Equation (
2) and Equations (4)–(9).
- Step 8:
Influence operation. According to Equations (17)–(19), the influence operation is performed to update the individuals in the population space.
- Step 9:
Stop the algorithm if the stopping criterion is satisfied; otherwise and go to Step 4.
6. Conclusions
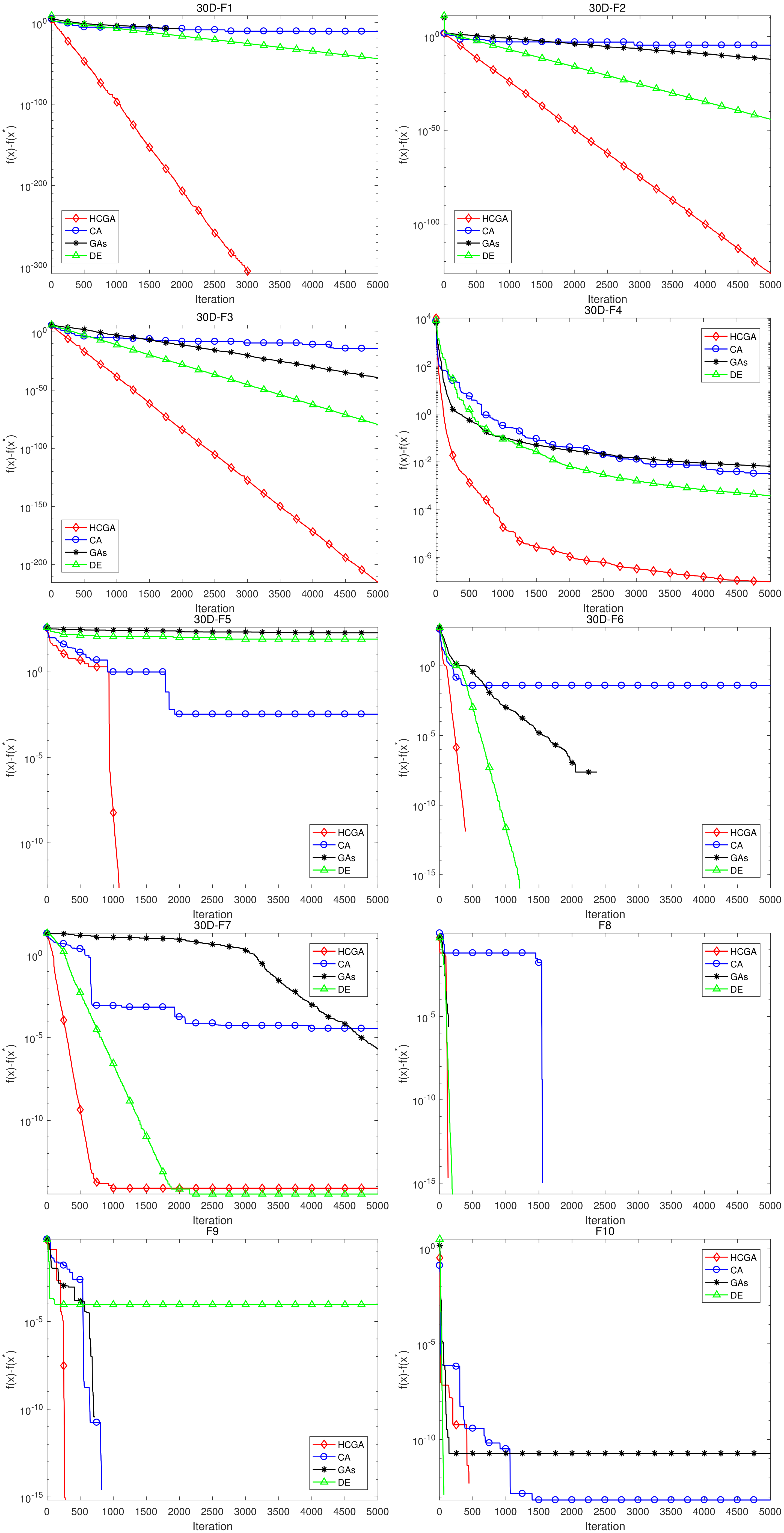
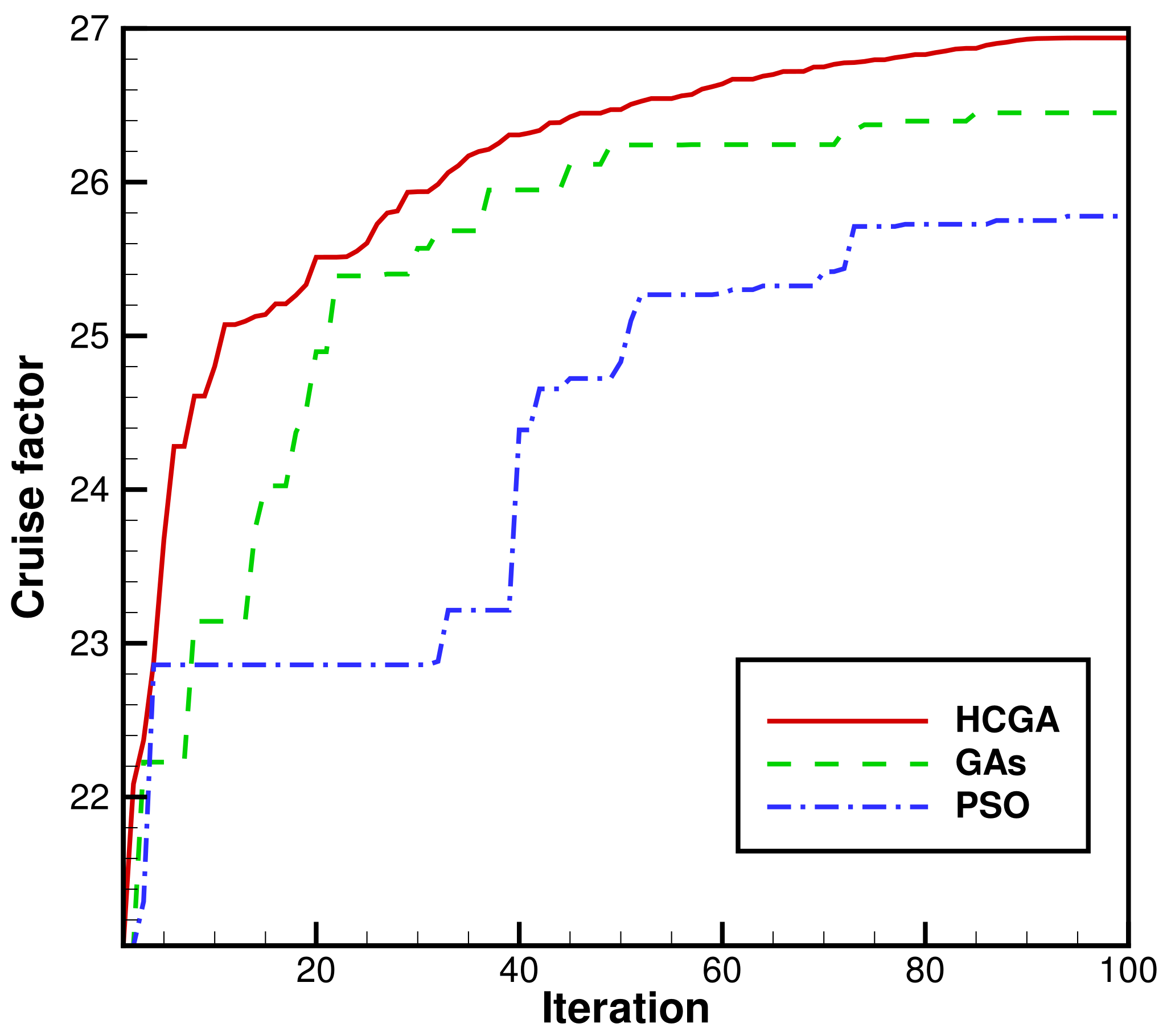
In this paper, an efficient hybrid evolutionary optimization method coupling CA with GAs (HCGA) was proposed to improve the efficiency of the optimization procedure for the aerodynamic shape of an aircraft. HCGA aims to improve the ability to solve complex problems and increase the efficiency of optimization. To improve the robustness of the algorithm, HCGA uses GAs as an evolutionary model of the population space. HCGA constructs the belief space using three kinds of knowledge: situational knowledge, normative knowledge and historical knowledge. Meanwhile, the knowledge-guided t-mutation operator was developed to dynamically adjust the mutation step and balance the exploitation and exploration ability of the algorithm. The optimization performance of HCGA was demonstrated on many benchmark functions for which the global optima are known a priori. The optimization results obtained with the benchmark functions show that HCGA provides a better global convergence, a better convergence speed and a better optimization accuracy compared to CA and GAs. In particular, HCGA shows the potential for solving large-scale design variable optimization problems.
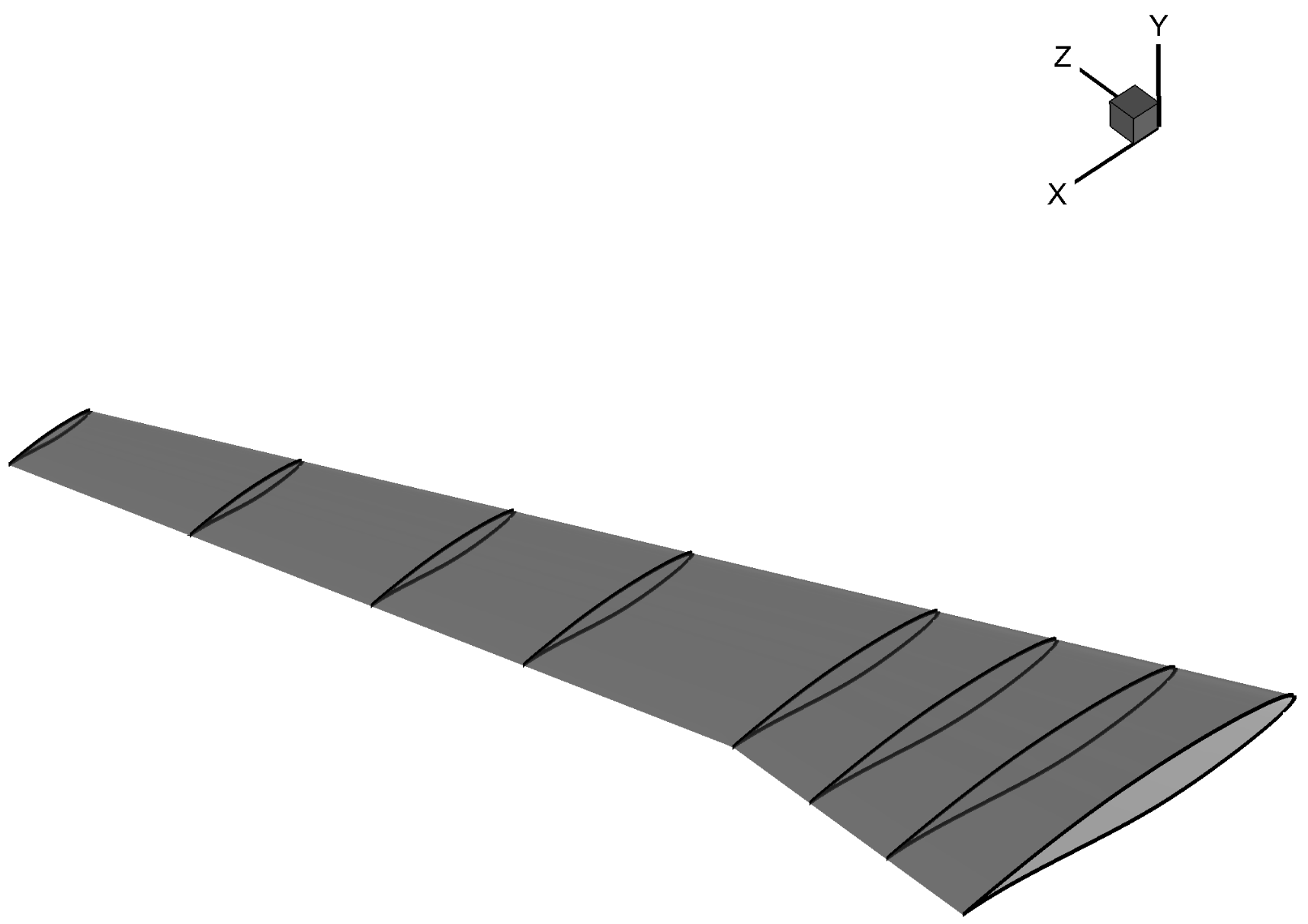
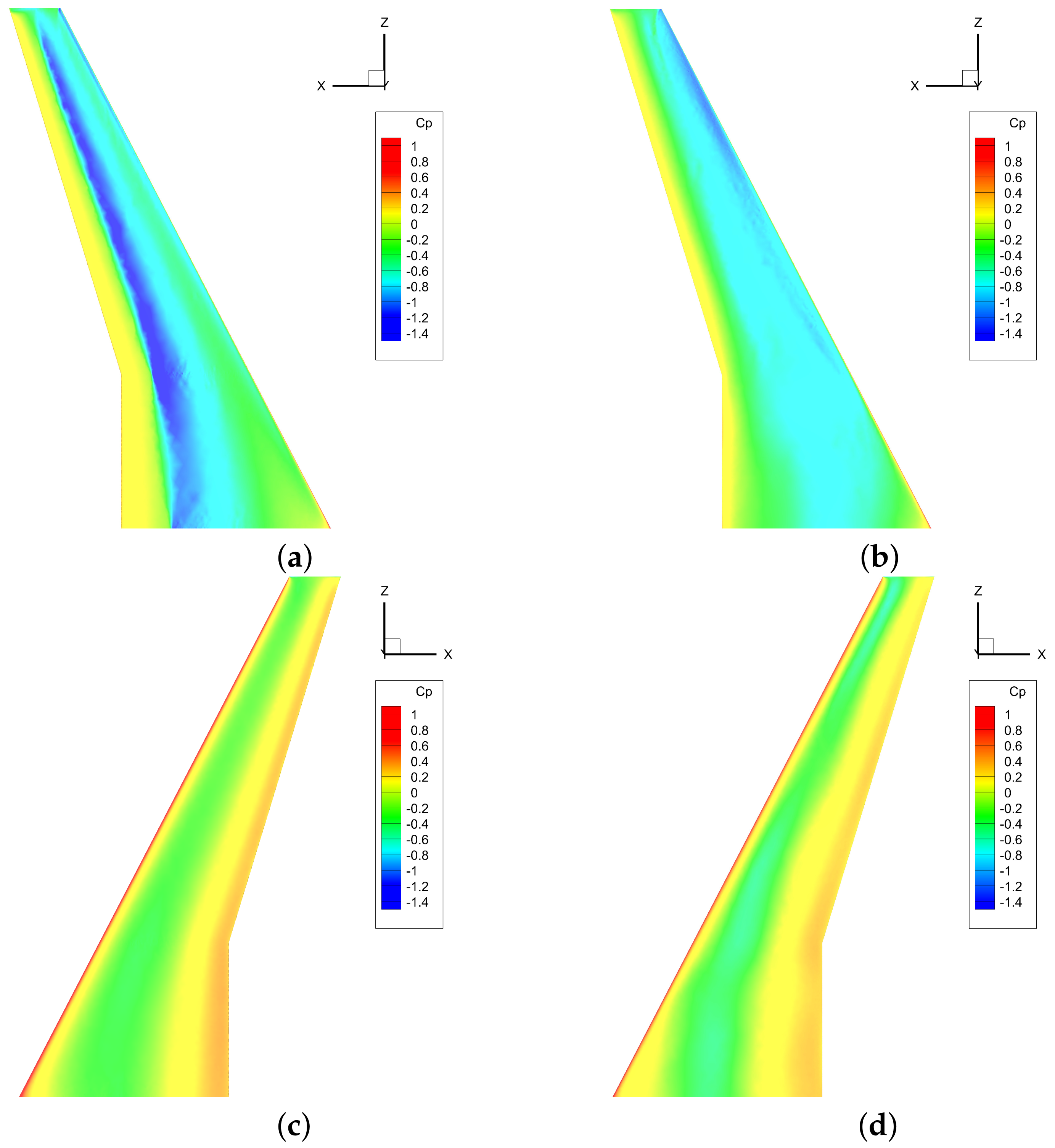
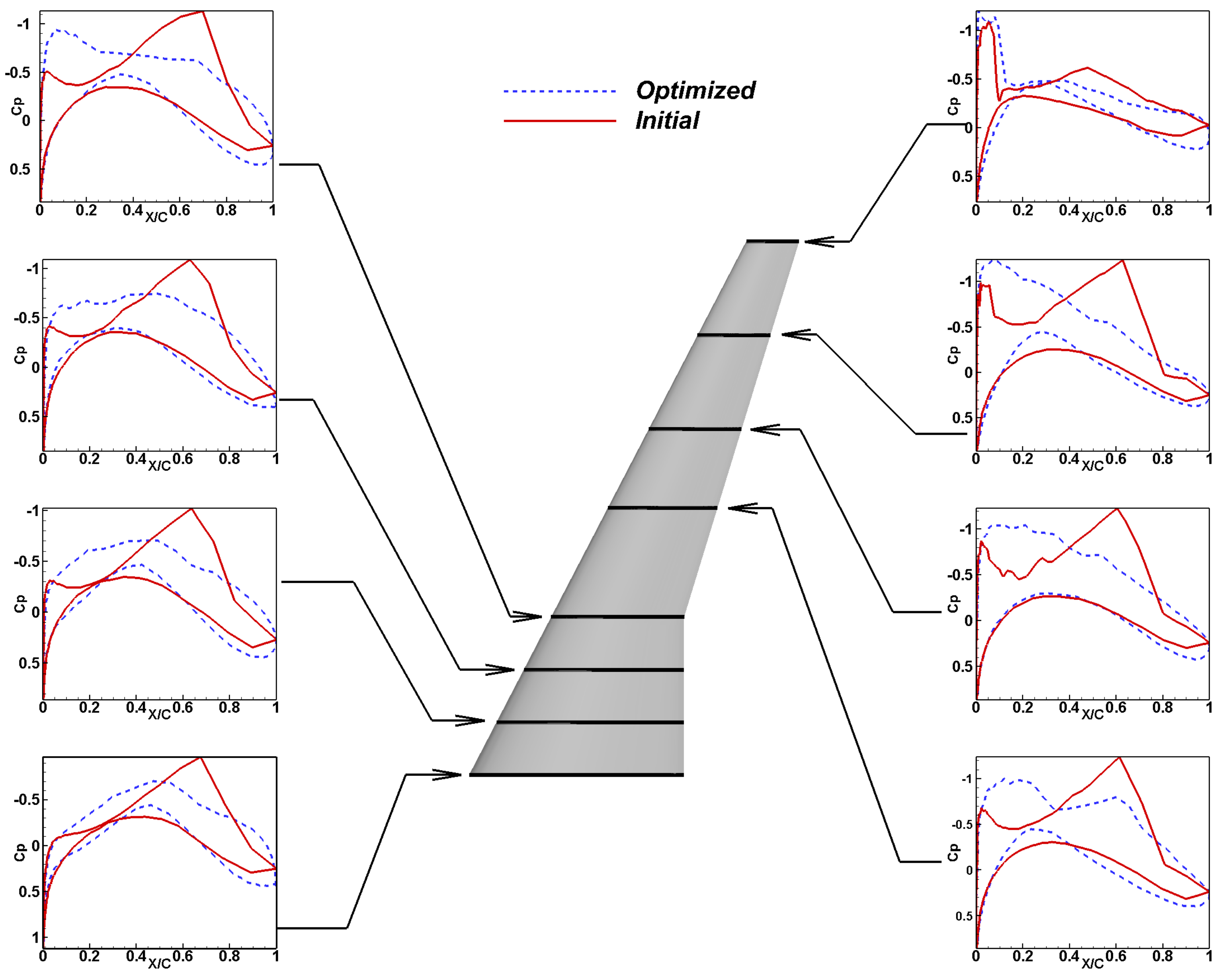
By combining HCGA with a CFD solver, an efficient decision-maker design tool for aerodynamic shape design optimization was developed to find the best aerodynamic shape to satisfy the design requirements. For the three-dimensional wing design problem, the proposed HCGA optimizer successfully reduced the wing drag computerized design, thus significantly improving the wing cruise factor. Compared with the baseline wing, the drag coefficient was reduced by 18.88%, which resulted in a 23.21% improvement in the cruise factor. This proves the capability and potential of HCGA for solving complex engineering design problems in aerodynamics. As a practical engineering application of the super-heuristic algorithm, the potential and value of such algorithms for engineering applications are further validated.
However, this study is only preliminary and further testing is needed to evaluate the performance of HCGA in complex engineering optimization. In addition, the practical application of HCGA only considered single-objective optimization. Multi-objective optimization problems should thus be the next step for investigation in future research.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}