
URANS Analysis of a Launch Vehicle Aero-Acoustic Environment



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Governing Equations
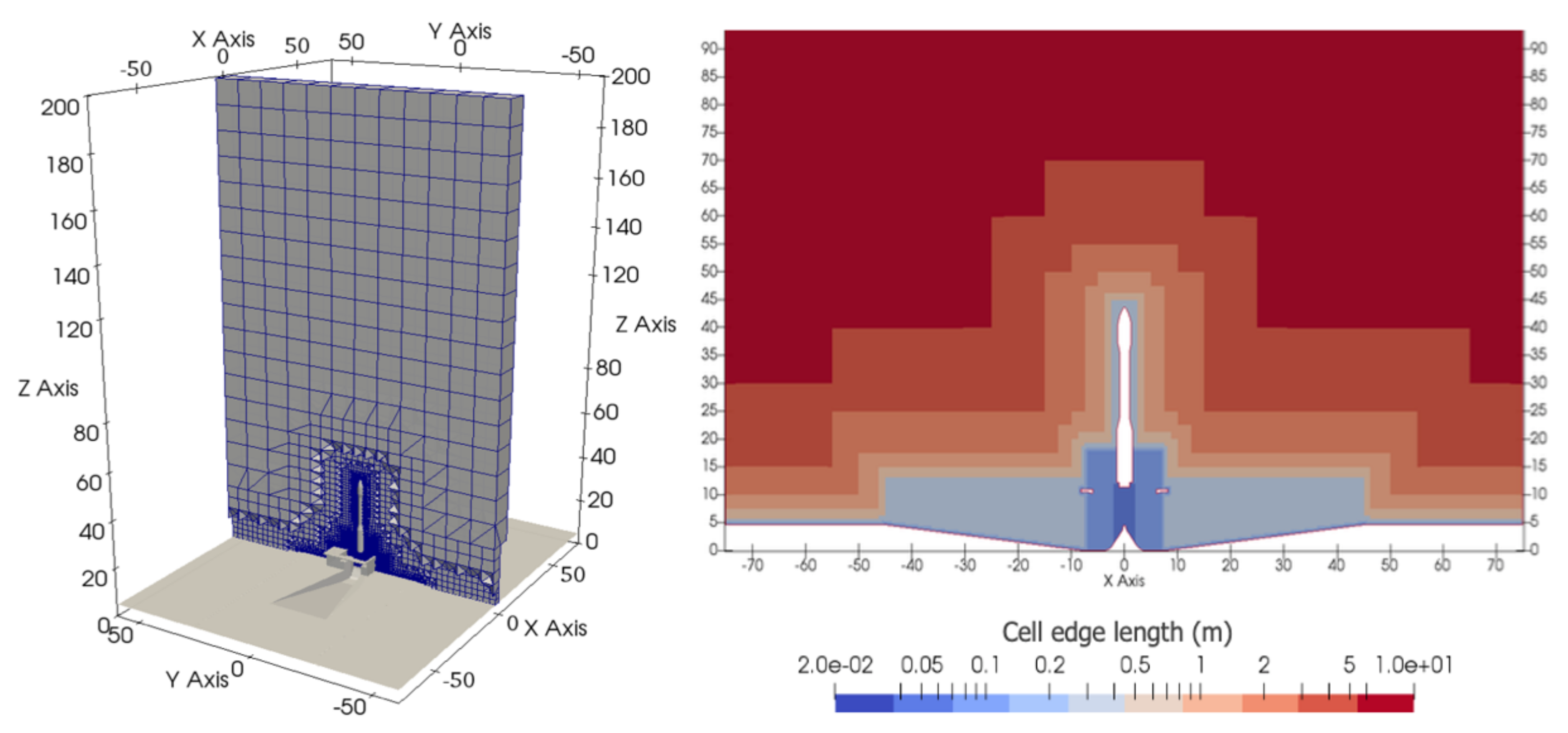
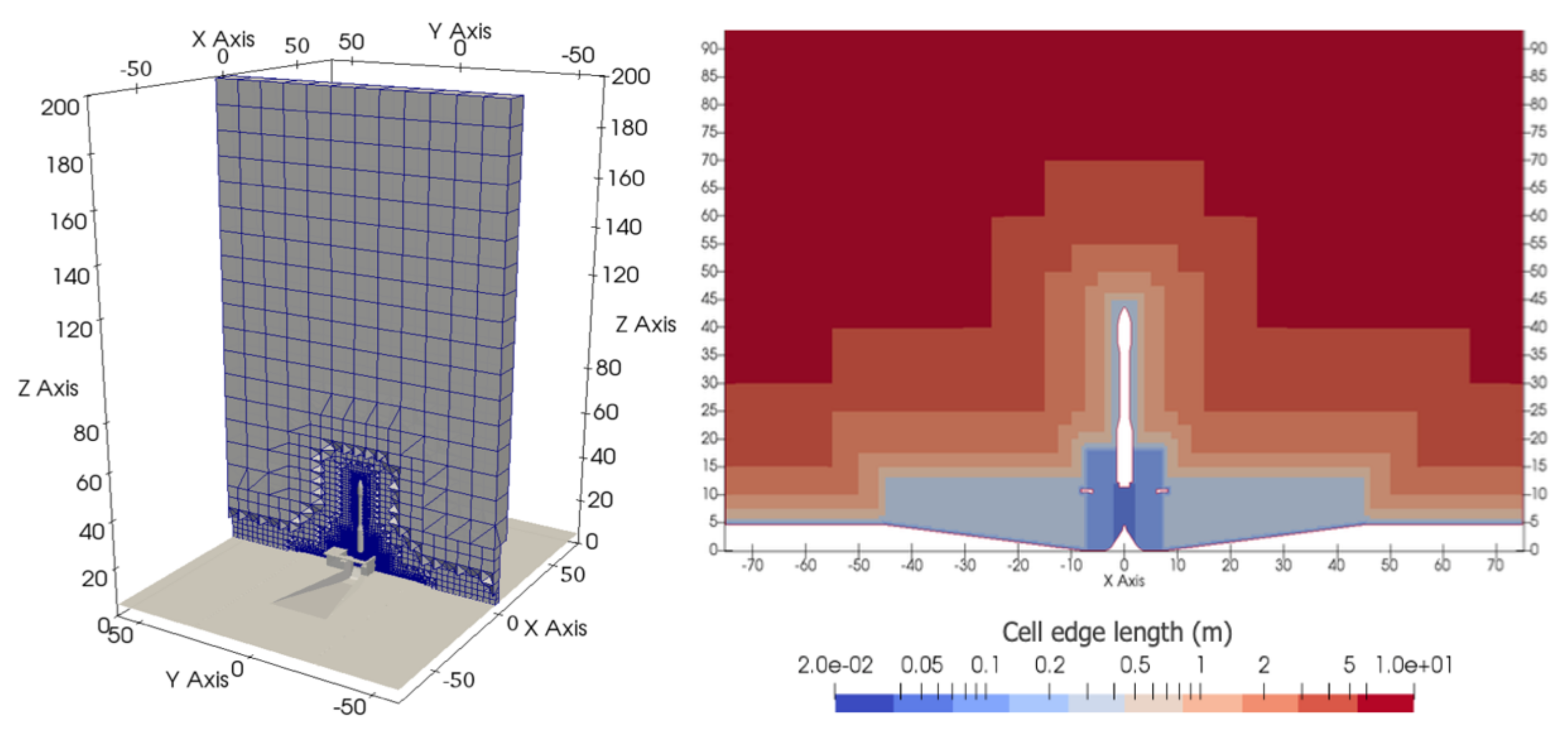
2.2. Geometry and Mesh
2.3. Flow Conditions and Numerical Schemes
3. Results and Discussion
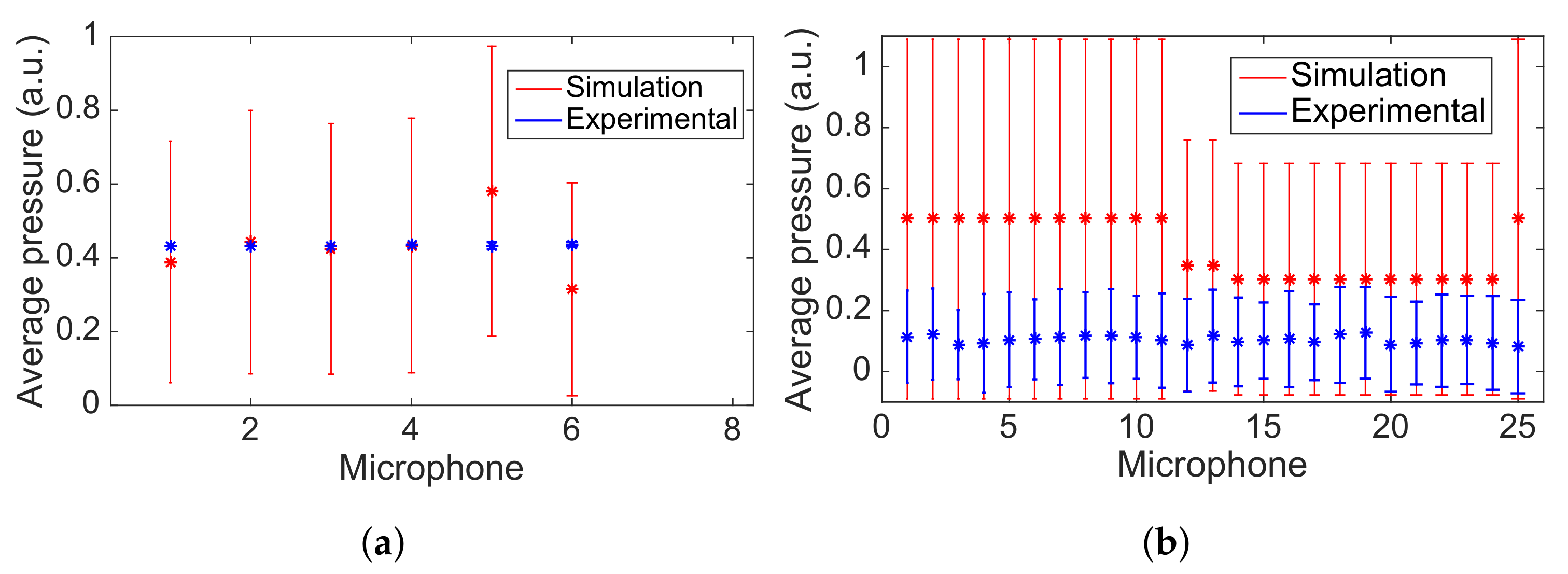
3.1. Validation of the Results
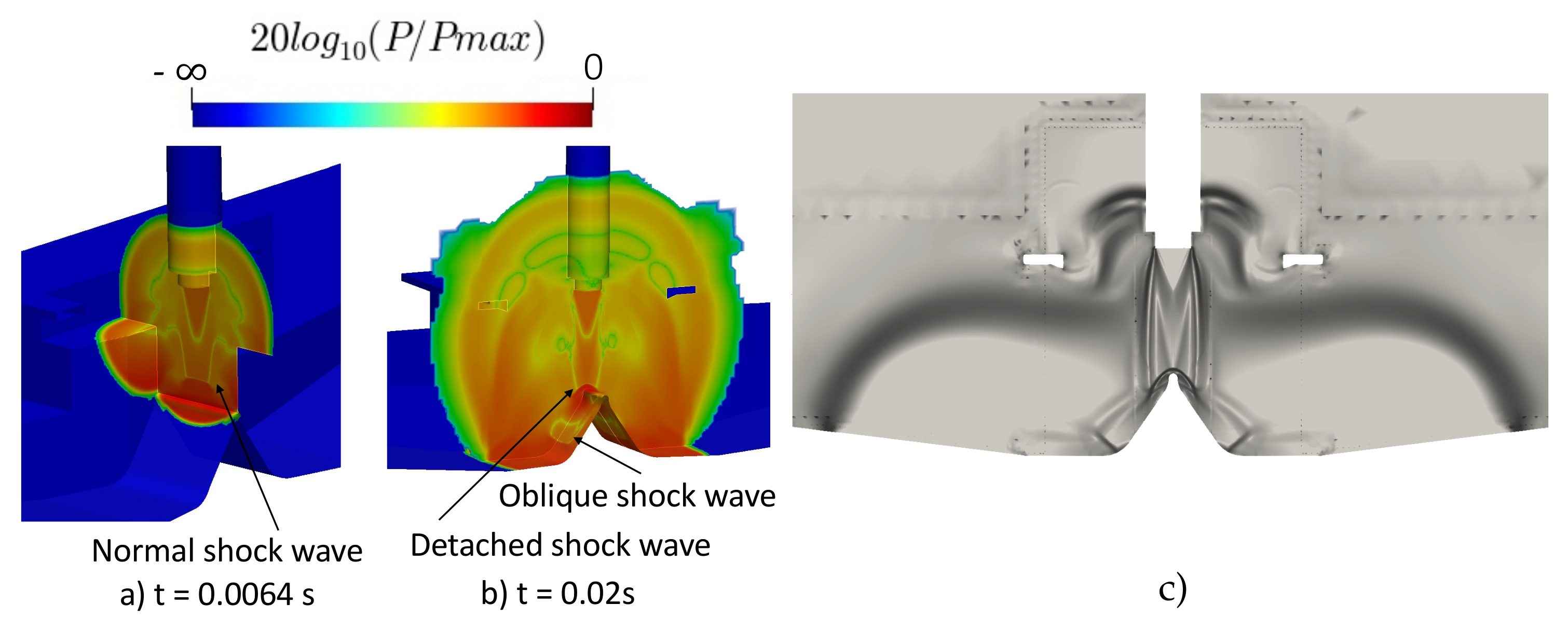
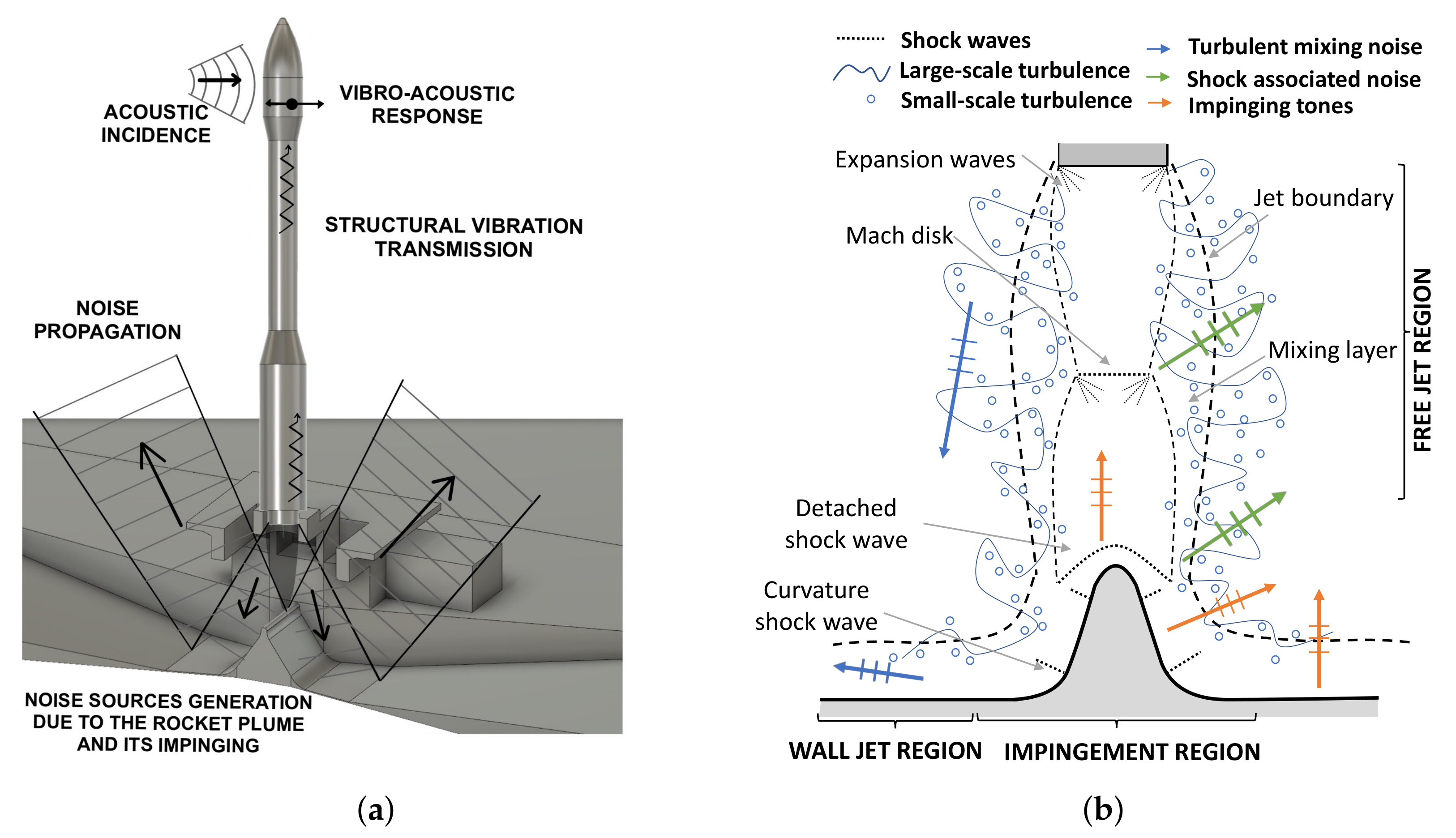
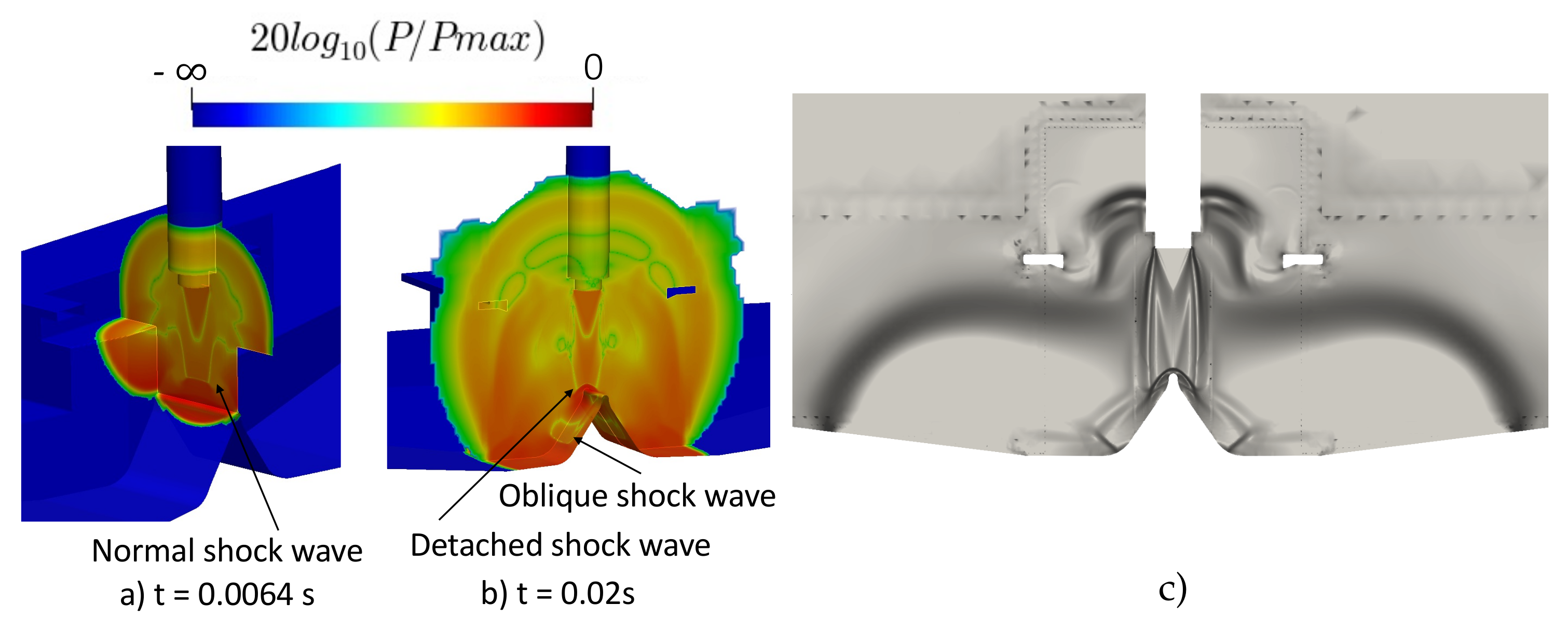
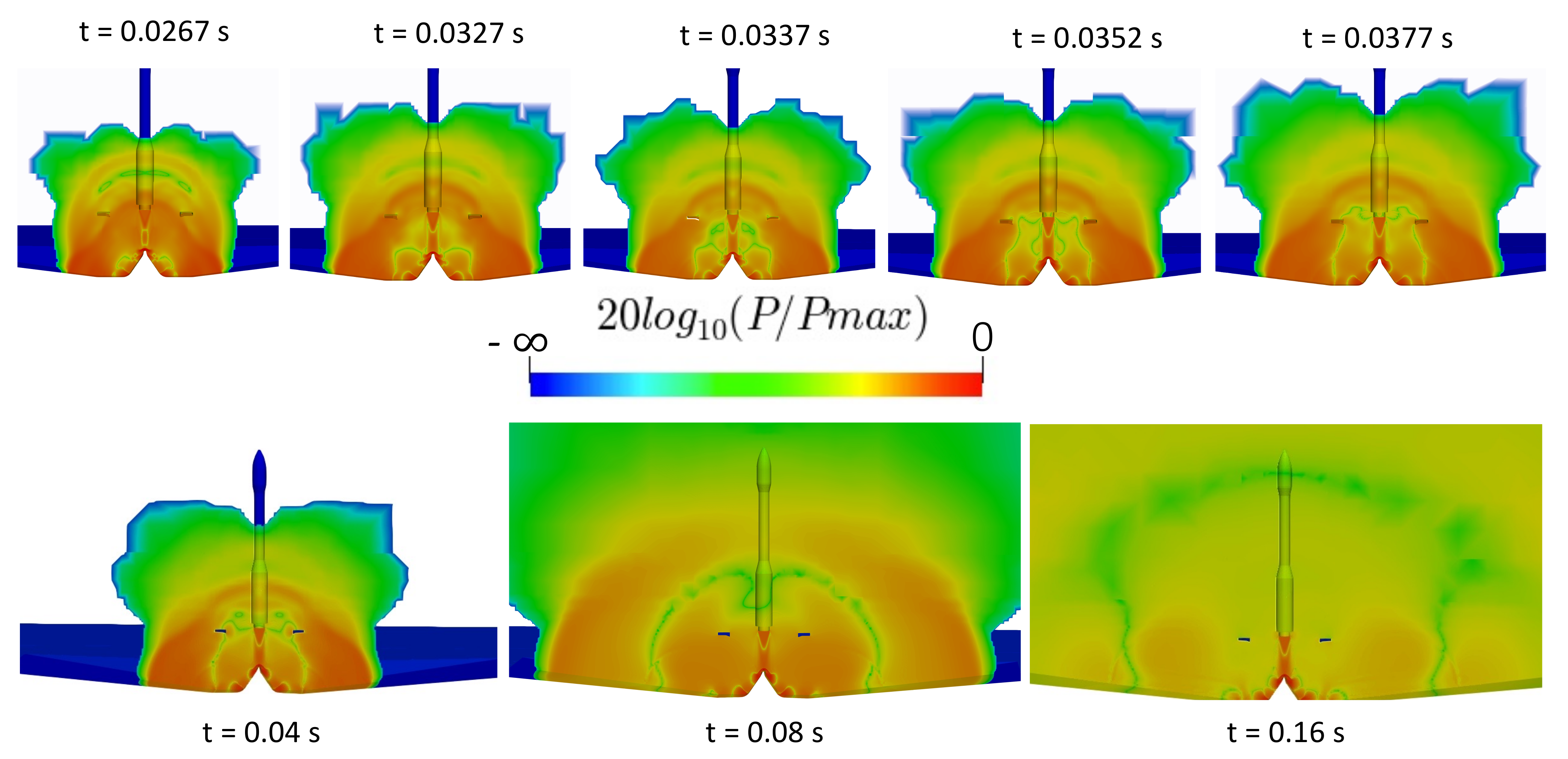
3.2. Noise Source and Propagation
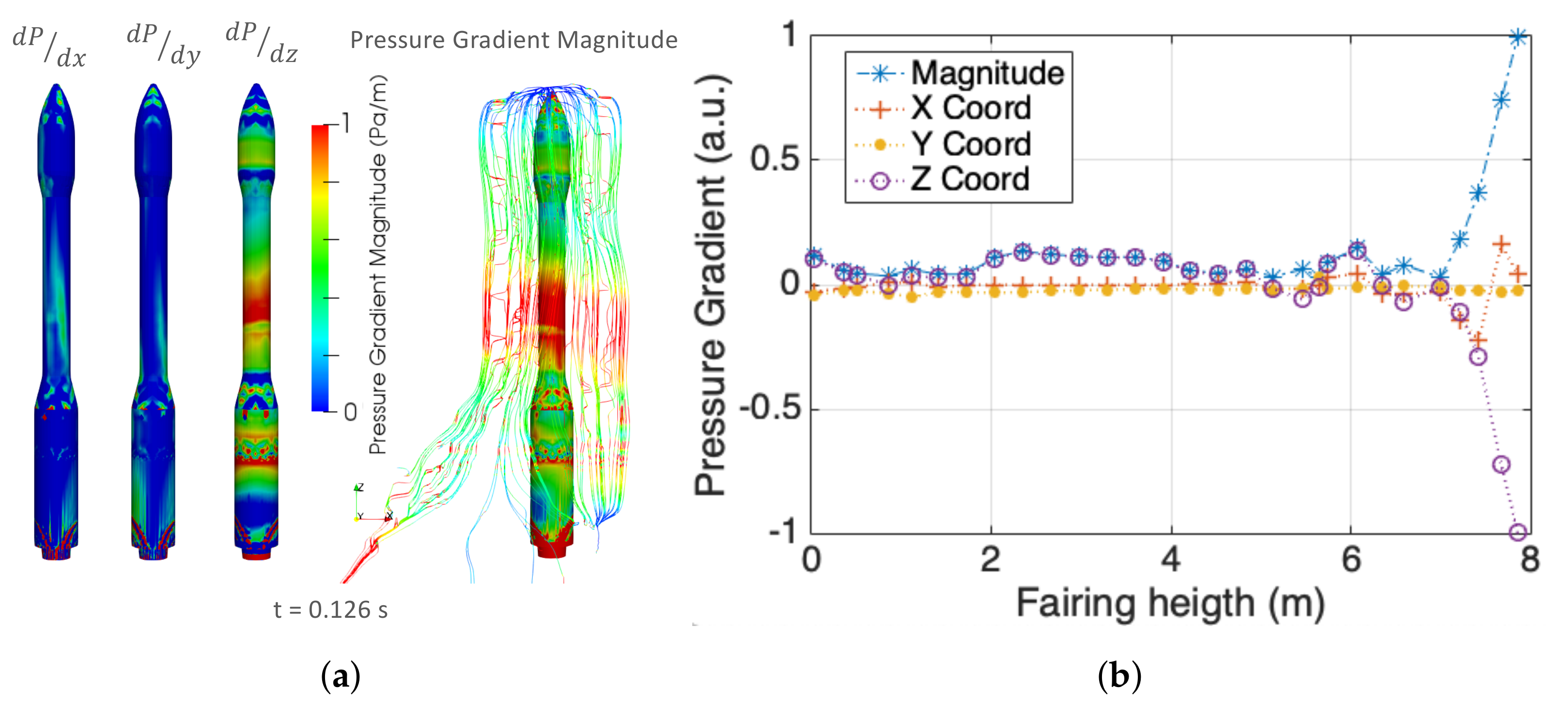
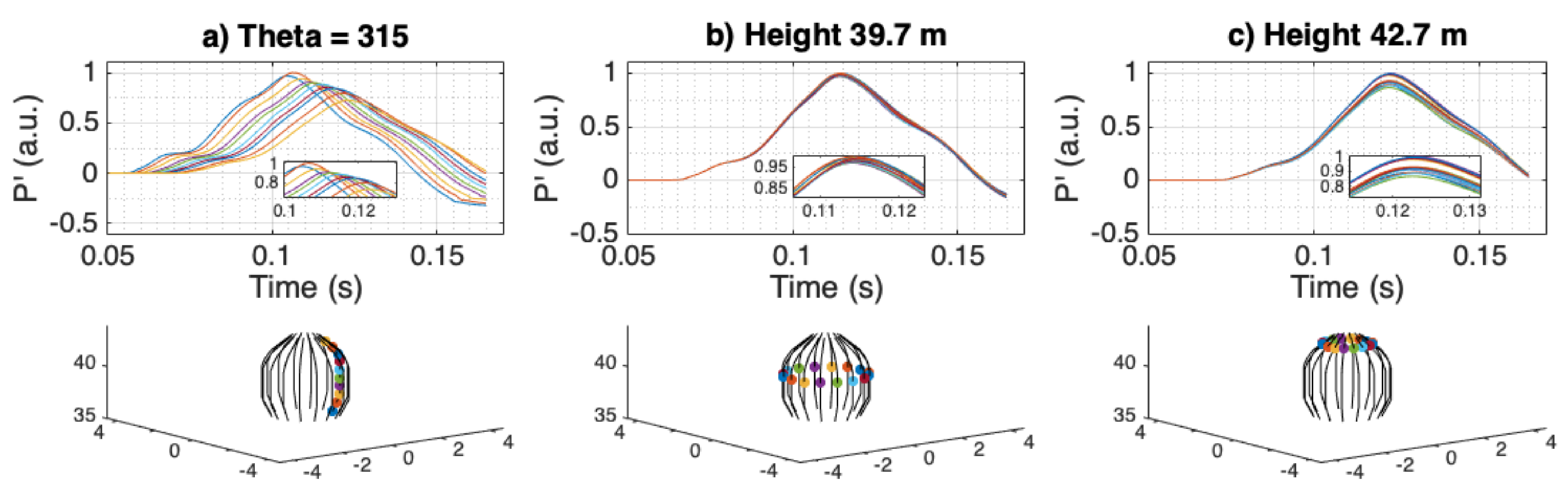
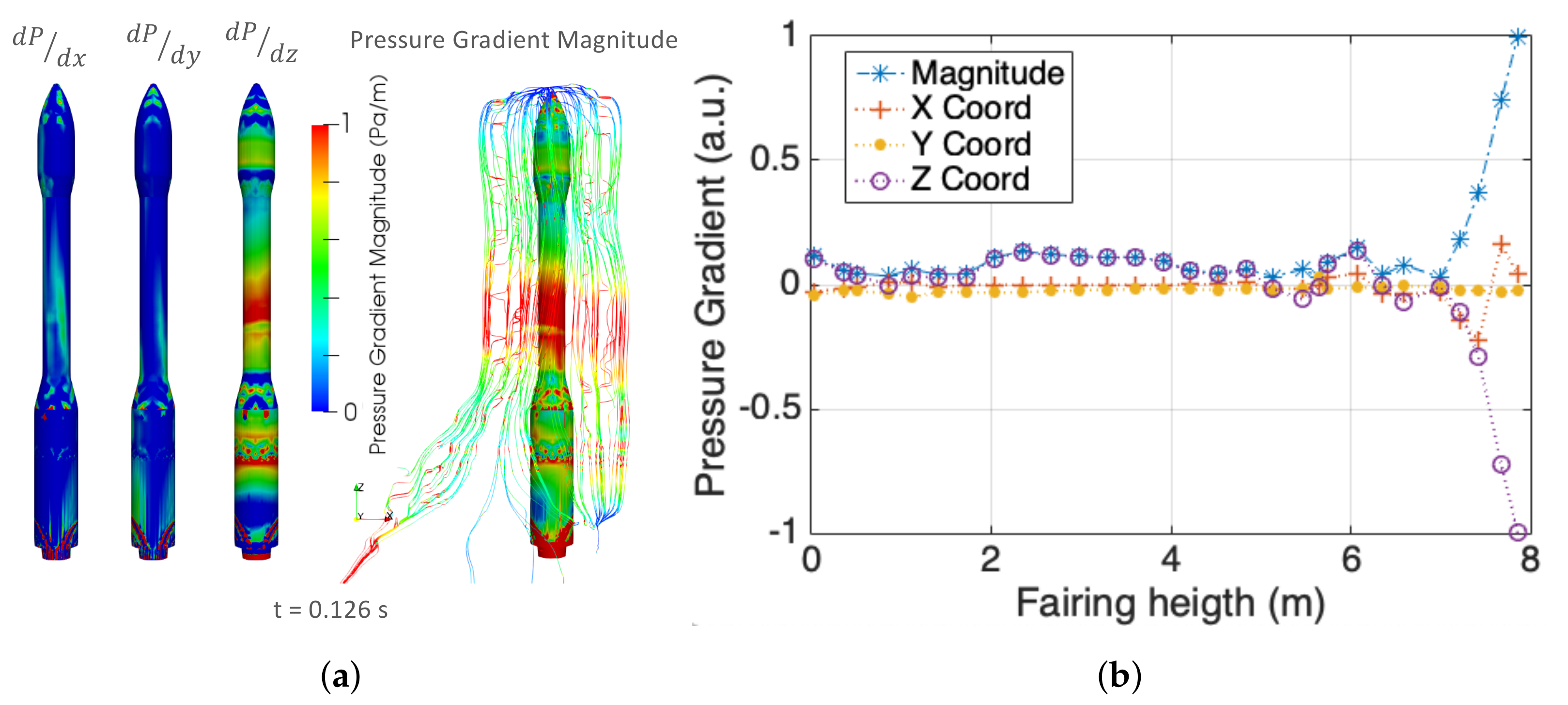
3.3. Incidence of the Pressure Field on the Fairing
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CFD | Computational fluid dynamics |
| LES | Large eddy simulations |
| DNS | Direct numerical simulation |
| RANS | Reynolds-averaged Navier–Stokes |
| URANS | Unsteady Reynolds-averaged Navier–Stokes |
References
- Eldred, K.M. Acoustic Loads Generated by the Propulsion System; Technical Report; National Aeronautics and Space Administration: Washington, DC, USA, 1971.
- Jiang, C.; Han, T.; Gao, Z.; Lee, C.H. A review of impinging jets during rocket launching. Prog. Aerosp. Sci. 2019, 109, 100547. [Google Scholar] [CrossRef]
- Arenas, J.P.; Margasahayam, R.N. Noise and vibration of spacecraft structures. Ingeniare. Rev. Chil. Ing. 2006, 14, 251–264. [Google Scholar] [CrossRef]
- Nonomura, T.; Nakano, H.; Ozawa, Y.; Terakado, D.; Yamamoto, M.; Fujii, K.; Oyama, A. Large eddy simulation of acoustic waves generated from a hot supersonic jet. Shock Waves 2019, 29, 1133–1154. [Google Scholar] [CrossRef]
- Tam, C.K. Supersonic jet noise. Annu. Rev. Fluid Mech. 1995, 27, 17–43. [Google Scholar] [CrossRef]
- Hoyas, S.; Oberlack, M.; Kraheberger, S.; Álcantara-Ávila, F.; Laux, J. Wall turbulence at high friction Reynolds numbers. Phys. Rev. Fluids, 2021; to appear. [Google Scholar] [CrossRef]
- Gusman, M.; Housman, J.; Kiris, C. Best Practices for CFD simulations of launch vehicle ascent with plumes-overflow perspective. In Proceedings of the 49th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2011; p. 1054. [Google Scholar]
- McGuirk, J. Propulsive jet aerodynamics and aeroacoustics. Aeronaut. J. 2022, 126, 2–58. [Google Scholar] [CrossRef]
- Tatsukawa, T.; Nonomura, T.; Oyama, A.; Fujii, K. Multi-objective aeroacoustic design exploration of launch-pad flame deflector using large-eddy simulation. J. Spacecr. Rocket. 2016, 53, 751–758. [Google Scholar] [CrossRef]
- Xing, C.; Le, G.; Shen, L.; Zhao, C.; Zheng, H. Numerical investigations on acoustic environment of multi-nozzle launch vehicle at lift-off. Aerosp. Sci. Technol. 2020, 106, 106140. [Google Scholar] [CrossRef]
- Chin, C.; Li, M.; Harkin, C.; Rochwerger, T.; Chan, L.; Ooi, A.; Risborg, A.; Soria, J. Investigation of the Flow Structures in Supersonic Free and Impinging Jet Flows. J. Fluids Eng. 2013, 135, 031202. [Google Scholar] [CrossRef]
- Camussi, R.; Di Marco, A.; Stoica, C.; Bernardini, M.; Stella, F.; De Gregorio, F.; Paglia, F.; Romano, L.; Barbagallo, D. Wind tunnel measurements of the surface pressure fluctuations on the new VEGA-C space launcher. Aerosp. Sci. Technol. 2020, 99, 105772. [Google Scholar] [CrossRef]
- Escarti-Guillem, M.S.; Hoyas, S.; García-Raffi, L.M. Rocket plume URANS simulation using OpenFOAM. Results Eng. 2019, 4, 100056. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence Modeling for CFD; DCW Industries: La Cañada, CA, USA, 1998; Volume 2. [Google Scholar]
- Menter, F. Zonal two equation kw turbulence models for aerodynamic flows. In Proceedings of the 23rd Fluid Dynamics, Plasmadynamics, and Lasers Conference, Orlando, FL, USA, 6–9 July 1993; p. 2906. [Google Scholar]
- Ramírez, F.N.; Escarti-Guillem, M.S.; García-Raffi, L.M.; Hoyas, S. A study of the mesh effect on a rocket plume simulation. Results Eng. 2022, 13, 100366. [Google Scholar] [CrossRef]
- Kraposhin, M.V.; Banholzer, M.; Pfitzner, M.; Marchevsky, I.K. A hybrid pressure-based solver for nonideal single-phase fluid flows at all speeds. Int. J. Numer. Methods Fluids 2018, 88, 79–99. [Google Scholar] [CrossRef]
- Mortain, F.; Cléro, F.; Palmieri, D. Full Scale Acoustic Source Identification on VEGA Launch Pad at Lift-Off. In Proceedings of the ICSV26, Montreal, QC, Canada, 7–11 July 2019. [Google Scholar]
- Secretariat, E. Spacecraft mechanical loads analysis handbook. In European Cooperation for Space Standardization; ESA Requirements and Standards Division: Noordwijk, The Netherlands, 2013. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Escartí-Guillem, M.S.; García-Raffi, L.M.; Hoyas, S. URANS Analysis of a Launch Vehicle Aero-Acoustic Environment. Appl. Sci. 2022, 12, 3356. https://doi.org/10.3390/app12073356
Escartí-Guillem MS, García-Raffi LM, Hoyas S. URANS Analysis of a Launch Vehicle Aero-Acoustic Environment. Applied Sciences. 2022; 12(7):3356. https://doi.org/10.3390/app12073356
Chicago/Turabian StyleEscartí-Guillem, Mara S., Luis M. García-Raffi, and Sergio Hoyas. 2022. "URANS Analysis of a Launch Vehicle Aero-Acoustic Environment" Applied Sciences 12, no. 7: 3356. https://doi.org/10.3390/app12073356
APA StyleEscartí-Guillem, M. S., García-Raffi, L. M., & Hoyas, S. (2022). URANS Analysis of a Launch Vehicle Aero-Acoustic Environment. Applied Sciences, 12(7), 3356. https://doi.org/10.3390/app12073356