
A Novel Single Tube Semi-Active Tuned Liquid Gas Damper for Suppressing Horizontal Vibrations of Tower-like Structures


Abstract
:1. Introduction
2. Mechanical Model
2.1. Free Body Diagram of SA-TLGD
Linearization of the Fluid Flow Equation of Motion
2.2. Substructure Synthesis of a SDOF-Main System with SA-TLGD Attached
2.3. Substructure Synthesis of a MDOF-Main System with Multiple SA-TLGD Attached
3. Optimal Tuning of SA-TLGDs
3.1. Optimal Tuning of a Single SA-TLGD Attached to a SDOF-Main System
3.2. State Space Optimal Tuning of Multiple SA-TLGDs Attached to a MDOF-Main System
4. Numerical Studies on the Effectiveness of SA-TLGDs
4.1. SDOF-Wind Turbine with Single SA-TLGD Attached
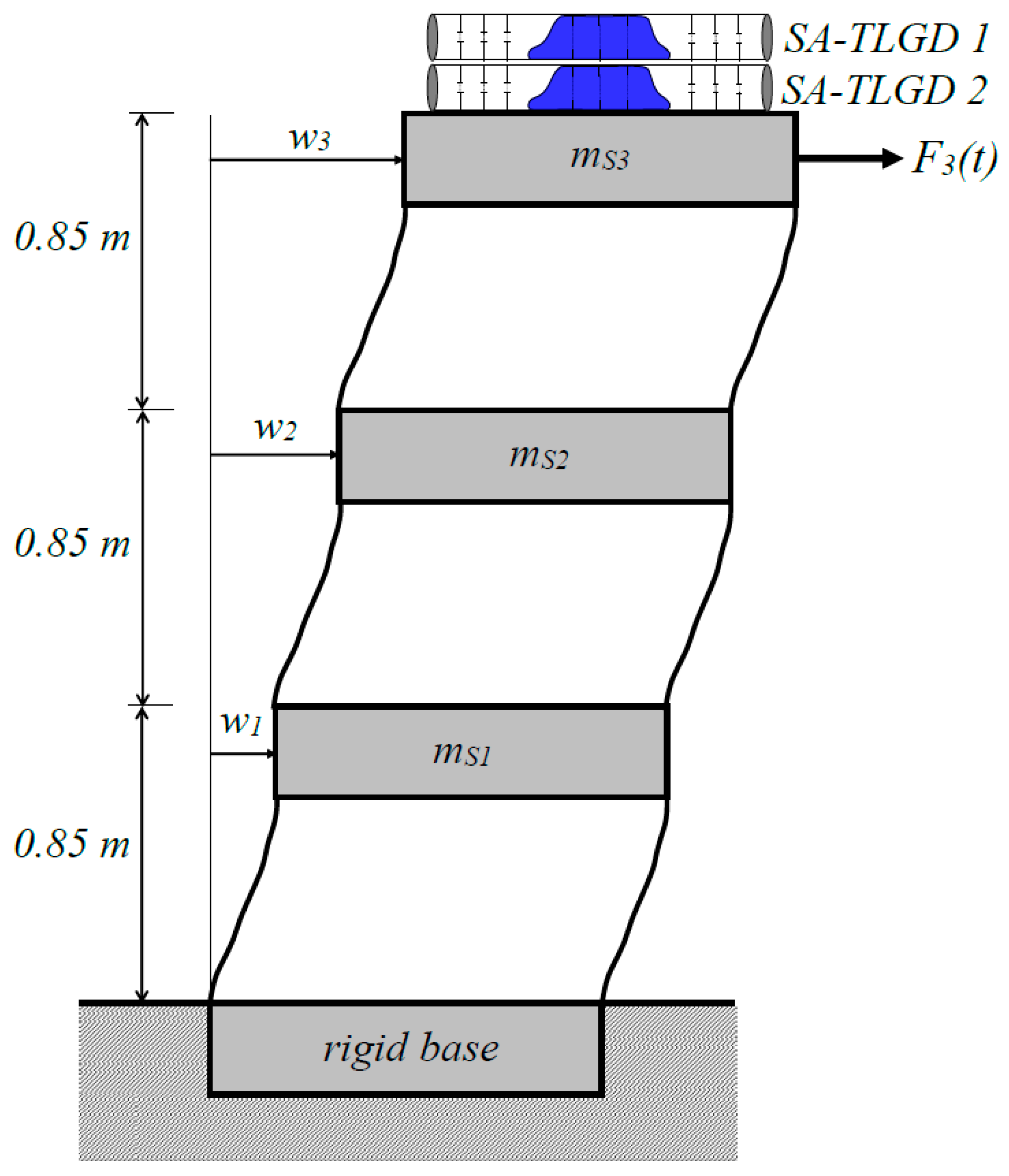
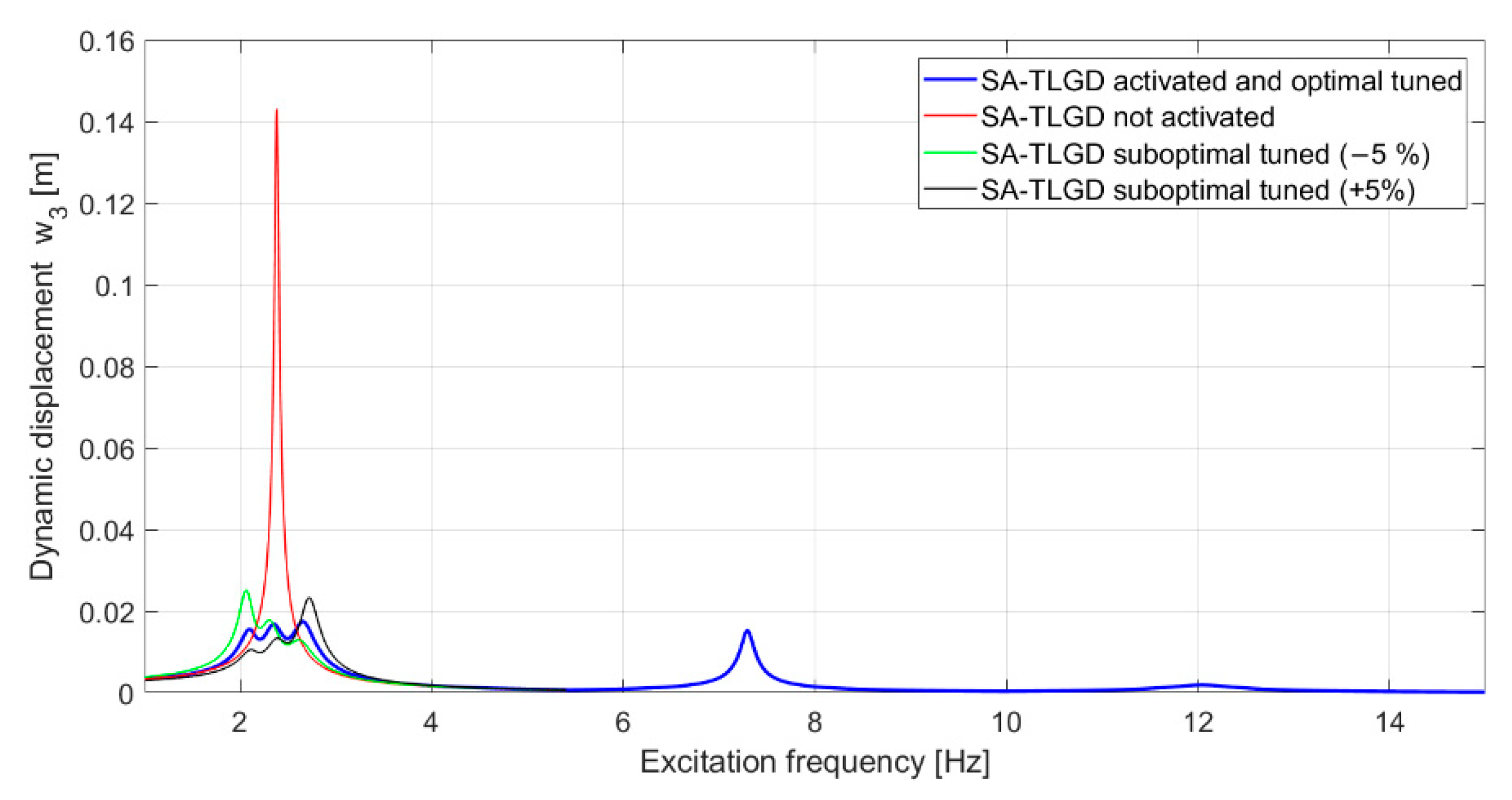
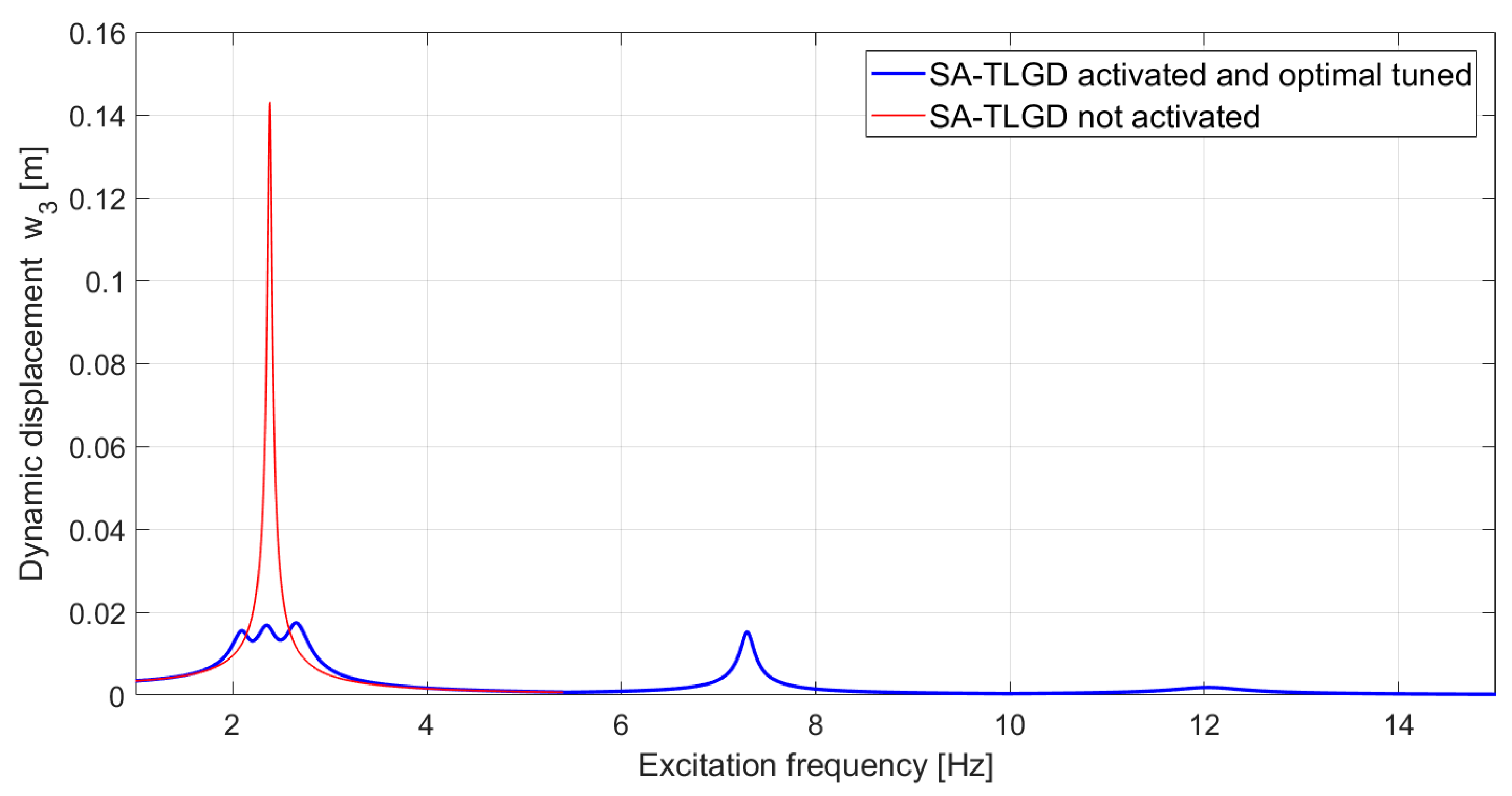
4.2. MDOF-Shear Frame Structure with Multiple SA-TLGDs Attached
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FRF | Frequency Response Function |
| MDOF | Multiple Degrees Of Freedom |
| MR-TLCD | Magneto-Rheological Tuned Liquid Column Damper |
| MW | Megawatt |
| SA-TLGD | Semi-Active Tuned Liquid Gas Damper |
| SDOF | Single Degree Of Freedom |
| TMD | Tuned Mass Damper |
| TLCD | Tuned Liquid Column Damper |
| TLCGD | Tuned Liquid Column Gas Damper |
| TLD | Tuned Liquid Damper |
| TSD | Tuned Sloshing Damper |
References
- Den Hartog, J.P. Mechanische Schwingungen; Verlag von Julius Springer: Berlin, Germany, 1936. (In German) [Google Scholar]
- Ormondroyd, J.; Den Hartog, J.P. Theory of the Dynamic Vibration Absorber. Appl. Mech. 1928, 50, 9–22. [Google Scholar]
- Brock, J.E. Theory of the Damped Dynamic Vibration Absorber for Inertial Disturbance. Appl. Mech. 1949, 16, 86–92. [Google Scholar] [CrossRef]
- McNamara, R.J. Tuned mass dampers for buildings. Struct. Div. 1977, 103, 1785–1798. [Google Scholar] [CrossRef]
- Kwok, K.C.S. Damping increase in building with tuned mass damper. Eng. Mech. 1984, 110, 1645–1649. [Google Scholar] [CrossRef]
- Soong, T.T.; Dargush, G.F. Passive Energy Dissipation Systems in Structural Engineering; John Wiley & Sons: New York, NY, USA, 1997. [Google Scholar]
- Petersen, C. Schwingungsdämpfer im Ingenieurbau; Maurer Söhne GmbH & Co. KG: München, Germany, 2001. (In German) [Google Scholar]
- Spencer, B.F.; Nagarajaiah, S. State of the art of structural control. Struct. Eng. 2003, 129, 845–856. [Google Scholar] [CrossRef]
- Bernuzzi, C.; Crespi, P.; Montuori, R.; Nastri, E.; Simoncelli, M.; Stochino, F.; Zucca, M. Resonance of steel wind turbine: Problems and Solutions. Structures 2021, 32, 65–75. [Google Scholar] [CrossRef]
- Fujii, K.; Tamura, Y.; Sato, T.; Wakahara, T. Wind induced vibration of tower and practical applications of tuned sloshing damper. J. Wind Eng. Ind. Aerodyn. 1988, 37, 537–546. [Google Scholar]
- Fujino, Y.; Pacheco, B.M.; Chaiseri, P.; Sun, L.M. Parametric studies on tuned liquid damper (TLD) using circular containers by free-oscillation experiment. J. Struct. Eng. Earthqu. Eng. 1988, 5, 381–391. [Google Scholar]
- Fujino, Y.; Sun, L.; Pacheco, B.M.; Chaiseri, P. Tuned Liquid Damper (TLD) for Suppressing Horizontal Motion of Structures. Eng. Mech. 1992, 118, 2017–2030. [Google Scholar] [CrossRef] [Green Version]
- Kareem, A. Reduction of Wind Induced Motion Utilizing a Tuned Sloshing Damper. J. Wind Eng. Ind. Aerodyn. 1990, 36, 725–737. [Google Scholar] [CrossRef]
- Cavalagli, N.; Agresta, A.; Biscarini, C.; Ubertini, F.; Ubertini, S. Enhanced energy dissipation through 3D printed bottom geometry in Tuned Sloshing Dampers. J. Fluids Struct. 2021, 106. [Google Scholar] [CrossRef]
- Pandey, D.K.; Sharma, M.K.; Mishra, S.K. A compliant tuned liquid damper for controlling seismic vibration of short period structures. Mech. Syst. Signal Process. 2019, 132, 405–428. [Google Scholar] [CrossRef]
- Pandey, D.K.; Mishra, S.K.; Chakraborty, S. A tuned liquid mass damper implemented in a deep liquid storage tank for seismic vibration control of short period structures. Struct. Des. Tall Spec. Build. 2022, e1928. [Google Scholar] [CrossRef]
- Sakai, F.; Takaeda, S.; Tamaki, T. Tuned liquid column damper—new type device for suppression of building vibrations. In Proceedings of the International Conference on Highrise Buildings, Nanjing, China, 25–27 March 1989; pp. 926–931. [Google Scholar]
- Balendra, T.; Wang, C.M.; Cheong, H.F. Effectiveness of tuned liquid column damper for vibration control of towers. Eng. Struct. 1995, 17, 668–675. [Google Scholar] [CrossRef]
- Hitchcock, P.A.; Kwok, K.C.S.; Watkins, R.D.; Samali, B. Characteristics of Liquid Column Vibration Absorbers (LCVA)-I. Eng. Struct. 1997, 19, 126–134. [Google Scholar] [CrossRef]
- Hitchcock, P.A.; Kwok, K.C.S.; Watkins, R.D.; Samali, B. Characteristics of Liquid Column Vibration Absorbers (LCVA)-II. Eng. Struct. 1997, 19, 135–144. [Google Scholar] [CrossRef]
- Reiterer, M.; Ziegler, F. Control of Pedestrian-Induced Vibrations of Long Span Bridges. Struct. Control Health Monit. 2006, 13, 1003–1027. [Google Scholar] [CrossRef]
- Hochrainer, M.J.; Ziegler, F. Control of tall building vibrations by sealed tuned liquid column dampers. Struct. Control Health Monit. 2006, 13, 980–1002. [Google Scholar] [CrossRef]
- Hochrainer, M.J.; Fotiu, P.A. Design of coupled tuned liquid column gas dampers for multi-mode reduction in vibrating structures. Acta Mech. 2018, 229, 911–928. [Google Scholar] [CrossRef] [Green Version]
- Mousavi, S.A.; Bargi, K.; Zahrai, S.M. Optimum geometry of tuned liquid column gas damper for control of offshore jacket platform vibrations under seismic excitation. Earthq. Eng. Eng. Vib. 2012, 11, 579–592. [Google Scholar] [CrossRef]
- Mousavi, S.A.; Bargi, K.; Zahrai, S.M. Optimum parameters of tuned liquid column—gas damper for mitigation of seismic-induced vibrations of offshore jacket platforms. Struct. Control Health Monit. 2013, 20, 422–444. [Google Scholar] [CrossRef]
- Zhao, Z.; Zhang, R.; Jiang, Y.; Pan, C. A tuned liquid inerter system for vibration control. Mech. Sci. 2019, 164. [Google Scholar] [CrossRef]
- Di Matteo, A.; Masnata, C.; Adam, C.; Pirrotta, A. Optimal design of tuned liquid column damper inerter for vibration control. Mech. Mech. Syst. Signal Proc. 2022, 167, 1–18. [Google Scholar] [CrossRef]
- Tamura, Y.; Suganuma, S. Evaluation of amplitude-dependent damping and natural frequency of building during strong winds. J. Wind. Eng. Ind. Aerodyn. 1996, 59, 115–130. [Google Scholar] [CrossRef]
- Caterino, N.; Georgakis, C.T.; Trinchillo, F.; Occhiuzzi, A. A Semi-Active Control System for Wind Turbines; Springer International Publishing: Basel, Switzerland, 2014. [Google Scholar]
- Karimi, H.R.; Zapateiro, M.; Luo, N. Semiactive vibration control of offshore wind turbine towers with tuned liquid column dampers using H∞ output feedback control. In Proceedings of the IEEE International Conference on Control Applications, Yokohama, Japan, 8–10 September 2010; pp. 2245–2249. [Google Scholar]
- Yalla, S.K.; Kareem, A.; Kantor, J.C. Semi-active tuned liquid column dampers for vibration control of structures. Eng. Struct. 2001, 23, 1469–1479. [Google Scholar] [CrossRef]
- Haroun, M.A.; Pires, J.A.; Won, A.Y.J. Effectiveness of hybrid liquid column dampers for suppressing structural vibrations. In Proceedings of the 13th International Modal Analysis Conference, Nashville, TN, USA, 13–16 February 1995; pp. 525–531. [Google Scholar]
- Altay, O.; Klinkel, S. A semi-active tuned liquid column damper for lateral vibration control of high-rise structures: Theory and experimental verification. Struct. Control Health Monit. 2018, 25, 422–444. [Google Scholar] [CrossRef]
- Wang, J.Y.; Ni, Y.Q.; Ko, J.M.; Spencer, B.F. Magneto-rheological tuned liquid column dampers (MR-TLCDs) for vibration mitigation of tall buildings: Modelling and analysis of open-loop control. Comp. Struct. 2005, 83, 2023–2034. [Google Scholar] [CrossRef]
- Sarkar, S.; Chakraborty, A. Optimal design of semiactive MR-TLCD for along-wind vibration control of horizontal axis wind turbine tower. Struct. Control Health Monit. 2018, 25. [Google Scholar] [CrossRef]
- Jolly, M.R.; Bender, J.W.; Carlson, J.D. Properties and applications of commercial magnetorheological fluids. Intell. Mater. Syst. Struct. 1999, 10, 5–13. [Google Scholar] [CrossRef]
- Tamboli, A. Manhattan’s mixed construction skyscrapers with tuned liquid and mass. In Proceedings of the CTBUH 7th World Congress, New York, NY, USA, 16–19 October 2005. [Google Scholar]
- Seidel, M. Tragstruktur und Installation der Offshore-Windenergieanlage REpower 5M in 45m Wassertiefe. Stahlbau 2007, 76, 650–656. (In German) [Google Scholar] [CrossRef]
- Ziegler, F. Mechanics of Solids and Fluids, 2nd ed.; Springer: New York, NY, USA, 1998. [Google Scholar]
- Idelchick, I.E. Handbook of Hydraulic Resistance, Coefficient of Local Resistance and of Friction; U.S. Department of Commerce Springfield: Washington, DC, USA, 1960.
- Clough, R.W.; Penzien, J. Dynamic of Structures; McGraw-Hill: New York, NY, USA, 1975. [Google Scholar]
- Pocanschi, A.; Phocas, M. Kräfte in Bewegung: Die Techniken des Erdbebensicheren Bauens; Vieweg: Berlin, Germany, 2003. (In German) [Google Scholar]
- Müller, P.C.; Schiehlen, W.O. Lineare Schwingungen. Theoretische Behandlung von Mehrfachen Schwingern; Akademische Verlagsgesellschaft: Wiesbaden, Germany, 1976. (In German) [Google Scholar]
- Deutsches Institut für Bautechnik. Richtlinie für Windenergieanlagen—Einwirkungen und Standsicherheitsnachweise für Turm und Gründung; Reihe B, Heft 8; DIBT: Berlin, Germany, 2004. (In German) [Google Scholar]
- Schaumann, P.; Seidel, M. Eigenschwingverhalten von Windenergieanlagen—Berechnungen und Messungen. In Proceedings of the 10th German Wind Energy Conference (DEWEK), Wilhelmshaven, Germany, 7–8 June 2000. [Google Scholar]
- Adhikaria, S.; Bhattacharyab, S. Dynamic analysis of wind turbine towers on flexible foundations. Shock. Vib. 2012, 19, 37–56. [Google Scholar] [CrossRef]
- Spencer, B.F.; Dyke, S.J.; Deoskar, H.S. Benchmark Problems in Structural Control, Part II: Active Tendon System. In Proceedings of the 1997 ASCE Structures Congress, Portland, OR, USA, 16 April 1997. [Google Scholar]
- Reiterer, M. Damping of Vibration Prone Engineering Structures with Emphasis on Bridges. Ph.D. Thesis, Vienna University of Technology, Vienna, Austria, 2001. (In German). [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter of the Wind Turbine | Variable | Value | Unit |
|---|---|---|---|
| Hub height | h | 60 | m |
| Tower diameter | D | 5.5 | m |
| Tower mass per unit length | ρA | 3330 | kg/m |
| Bending stiffness | EI | 2.9 × 1011 | Nm2 |
| Head mass | mP | 300,000 | kg |
| Modal damping ratio | ζS | 1.4 | % |
| Parameter of SA-TLGD | Variable | Value | Unit |
|---|---|---|---|
| Optimal natural frequency | fA,opt | 0.54 | Hz |
| Optimal damping ratio | ζA,opt | 6.28 | % |
| Mass ratio | μ = mf/mS | 1.0 | % |
| Fluid mass | mf | 3454 | kg |
| Fluid density | ρf | 1000 | kg/m3 |
| Fluid volume | Vf | 3.454 | m3 |
| Fluid horizontal length | Lf | 4.40 | m |
| Polytropic coefficient | n | 1.2 | - |
| Initial atmospheric pressure | p0 | 105 | Pa |
| Tube diameter | d | 1.0 | m |
| Tube cross-sectional area | AT | 0.79 | m2 |
| Gas spring length | Lg | 4.75 | m |
| Initial gas volume | V0 | 3.73 | m3 |
| Parameter of SA-TLGD | Variable | TLGD 1 | TLGD 2 | Unit |
|---|---|---|---|---|
| Optimal natural frequency | fAi,opt | 2.18 | 2.49 | Hz |
| Optimal damping ratio | ζAi,opt | 6.08 | 6.72 | % |
| Total fluid mass | mf,total | 60 | kg | |
| Total mass ratio | μtotal = mf,total/M1 | 4.0 | % | |
| Mass ratio of each SA-TLGD | μi = mfi/M1 | 2.0 | % | |
| Fluid mass of each SA-TLGD | mfi | 30 | kg | |
| Fluid density | ρf | 1000 | kg/m3 | |
| Fluid volume | Vf | 0.031 | m3 | |
| Fluid horizontal length | Lf | 0.624 | m | |
| Polytropic coefficient | n | 1.2 | - | |
| Initial atmospheric pressure | p0 | 105 | Pa | |
| Tube diameter | d | 0.25 | m | |
| Tube cross-sectional area | AT | 0.049 | m2 | |
| Gas spring length | Lg | 2.05 | 1.57 | m |
| Initial gas volume | V0 | 0.1007 | 0.0772 | m3 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Reiterer, M.; Schellander, J. A Novel Single Tube Semi-Active Tuned Liquid Gas Damper for Suppressing Horizontal Vibrations of Tower-like Structures. Appl. Sci. 2022, 12, 3301. https://doi.org/10.3390/app12073301
Reiterer M, Schellander J. A Novel Single Tube Semi-Active Tuned Liquid Gas Damper for Suppressing Horizontal Vibrations of Tower-like Structures. Applied Sciences. 2022; 12(7):3301. https://doi.org/10.3390/app12073301
Chicago/Turabian StyleReiterer, Michael, and Janez Schellander. 2022. "A Novel Single Tube Semi-Active Tuned Liquid Gas Damper for Suppressing Horizontal Vibrations of Tower-like Structures" Applied Sciences 12, no. 7: 3301. https://doi.org/10.3390/app12073301
APA StyleReiterer, M., & Schellander, J. (2022). A Novel Single Tube Semi-Active Tuned Liquid Gas Damper for Suppressing Horizontal Vibrations of Tower-like Structures. Applied Sciences, 12(7), 3301. https://doi.org/10.3390/app12073301