
Performance of Numerically Optimized Tuned Mass Damper with Inerter (TMDI)



Abstract
:1. Introduction
2. Modelling
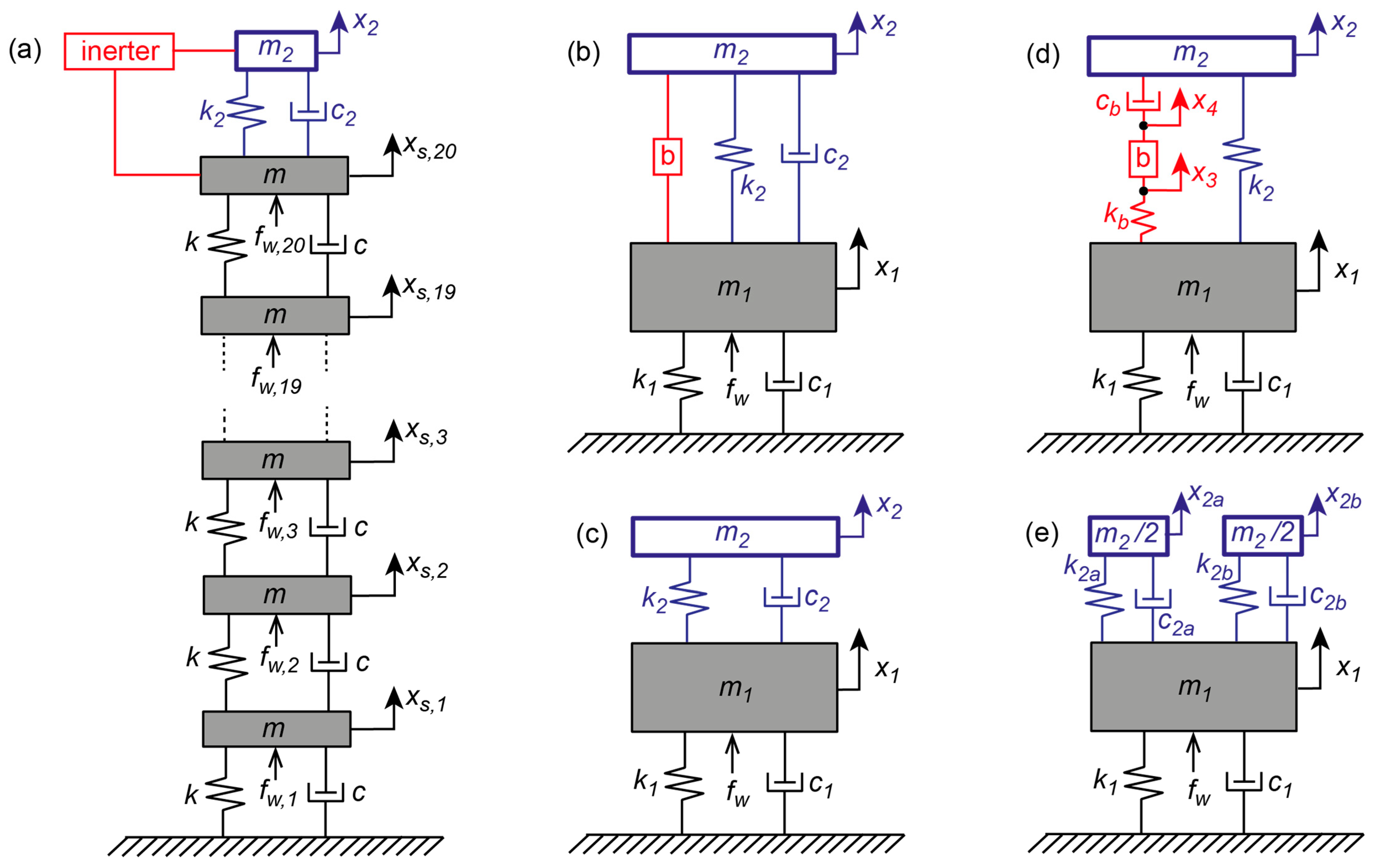
2.1. Primary Structure
2.2. Primary Structure with TMD
2.3. Primary Structure with TMDI with Inerter in Parallel to the Spring and Viscous Damper
2.4. Primary Structure with TMDI with Inerter in Series with Stiffness and Viscous Damper
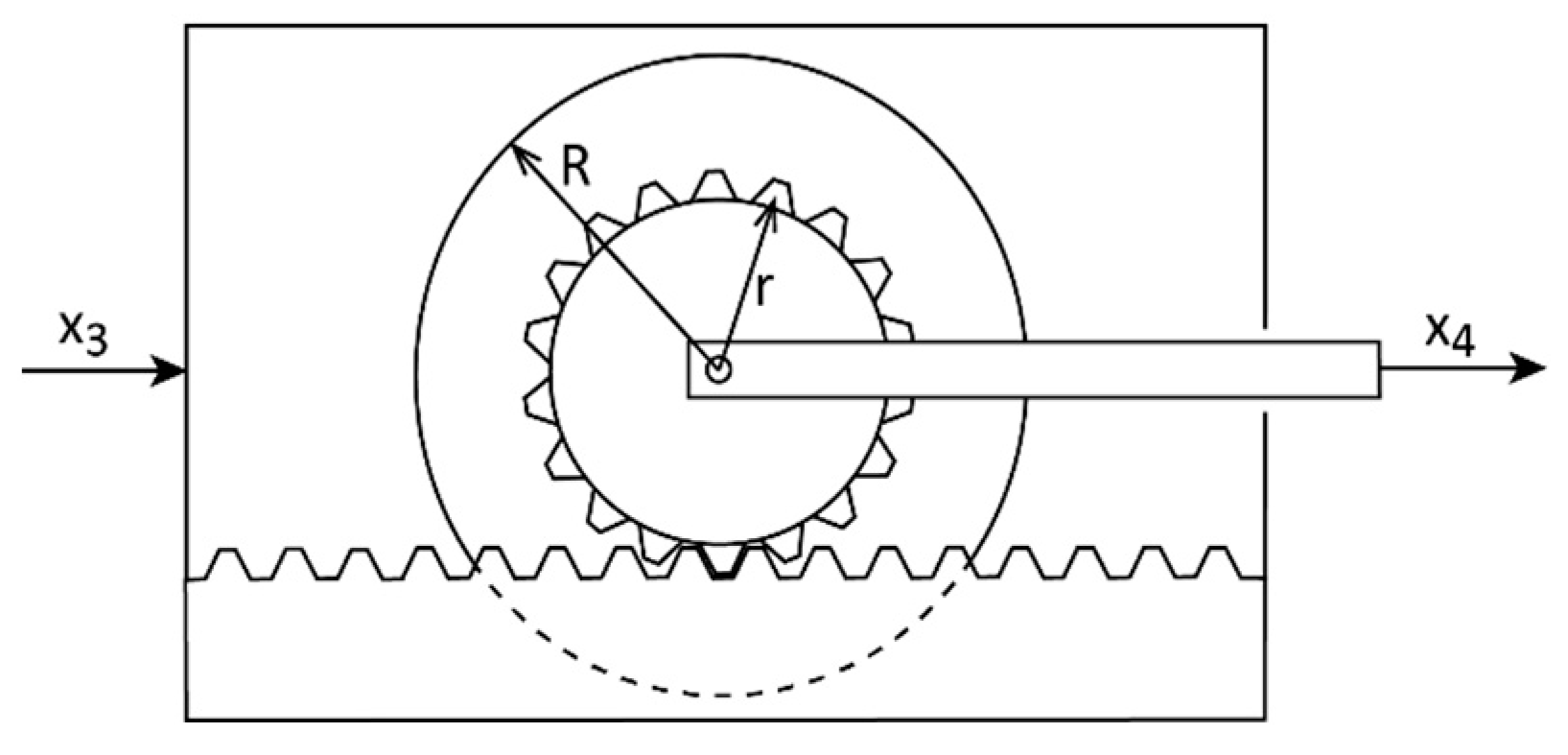
2.5. Primary Structure with TMDI with Fly Wheel Inerter in Series with Stiffness and Viscous Damper
2.6. Primary Structure with Two Half TMDs
3. Simulation Procedure
3.1. TMDI Optimization
3.2. TMD Optimization
3.3. Assessments of TMDI and TMD
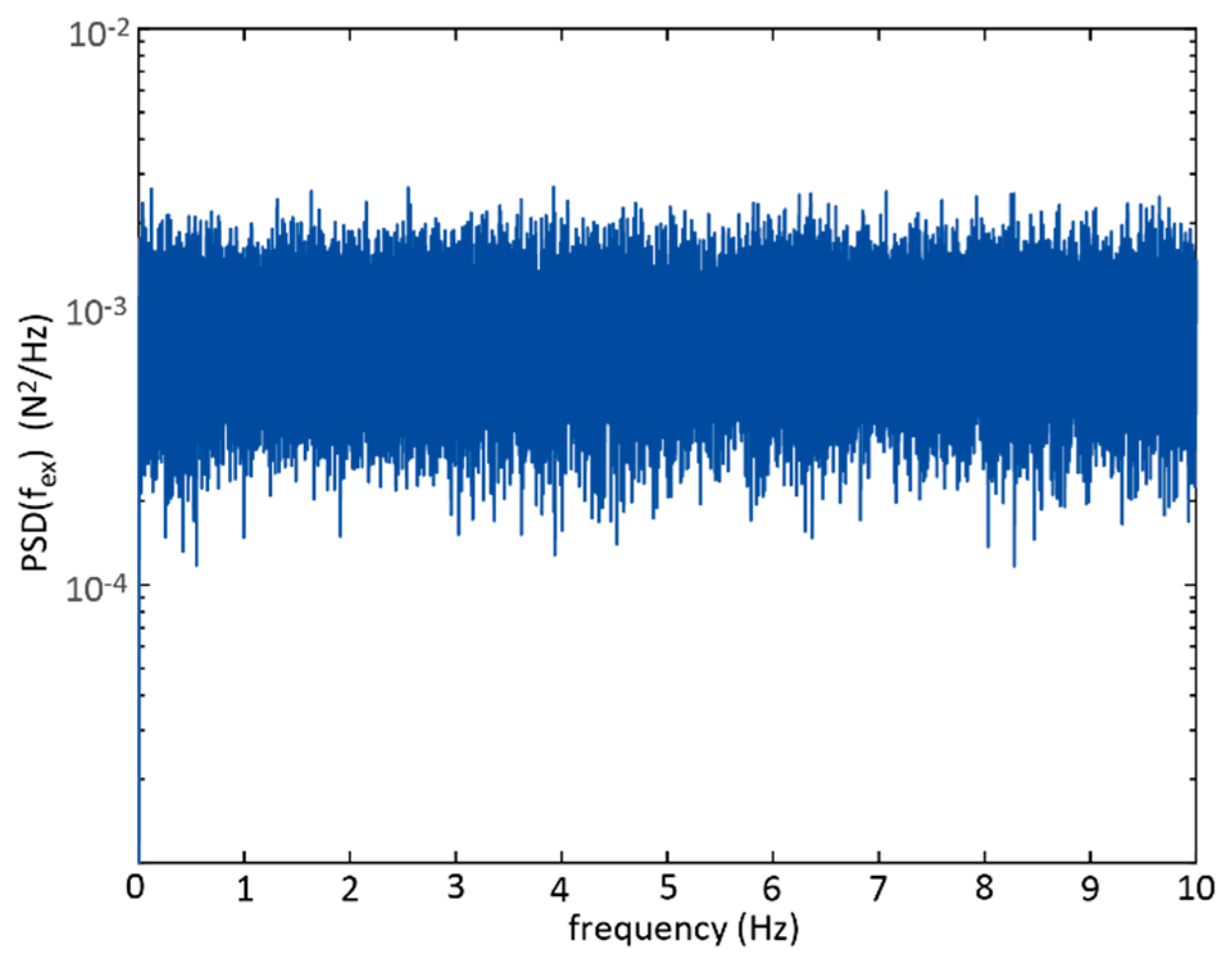
3.4. Excitation
4. Results
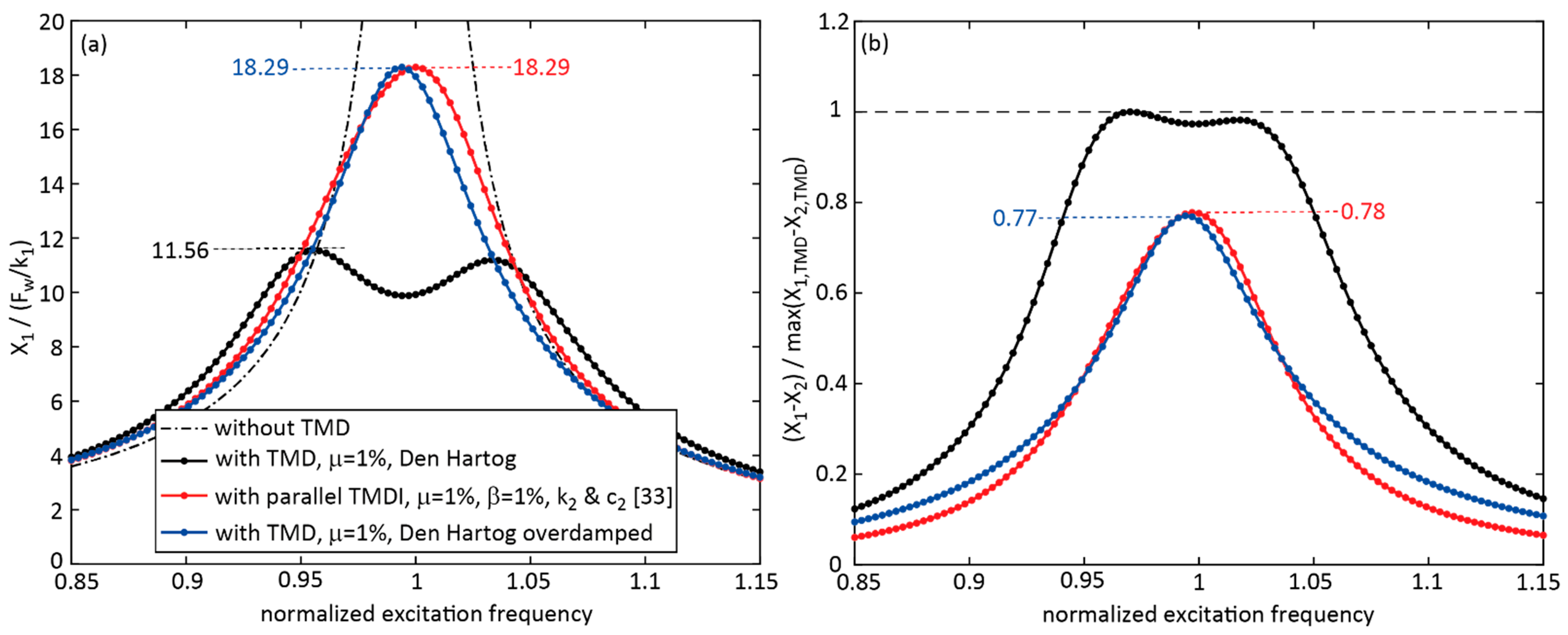
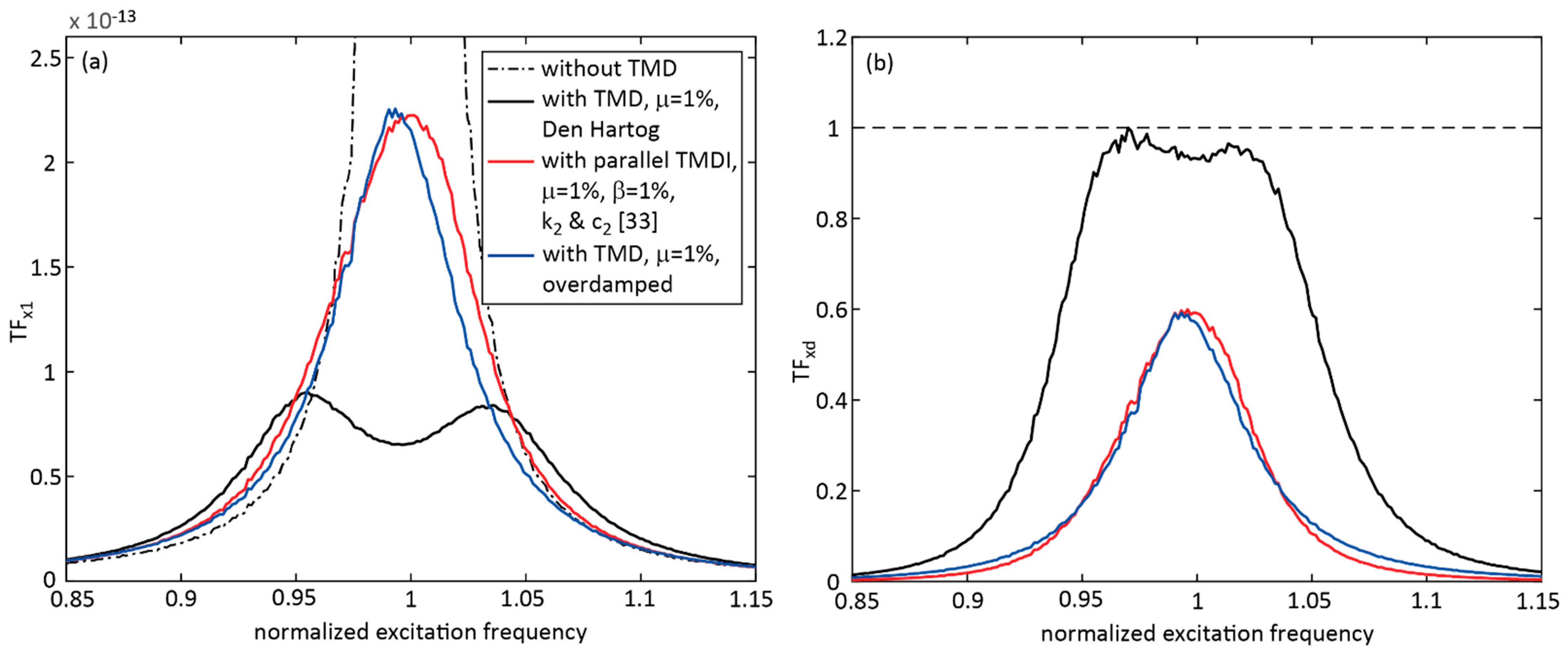
4.1. TMDI with Inerter in Parallel to Stiffness and Viscous Damper, = 1%, Tuning According to Parameters Described in the Literature
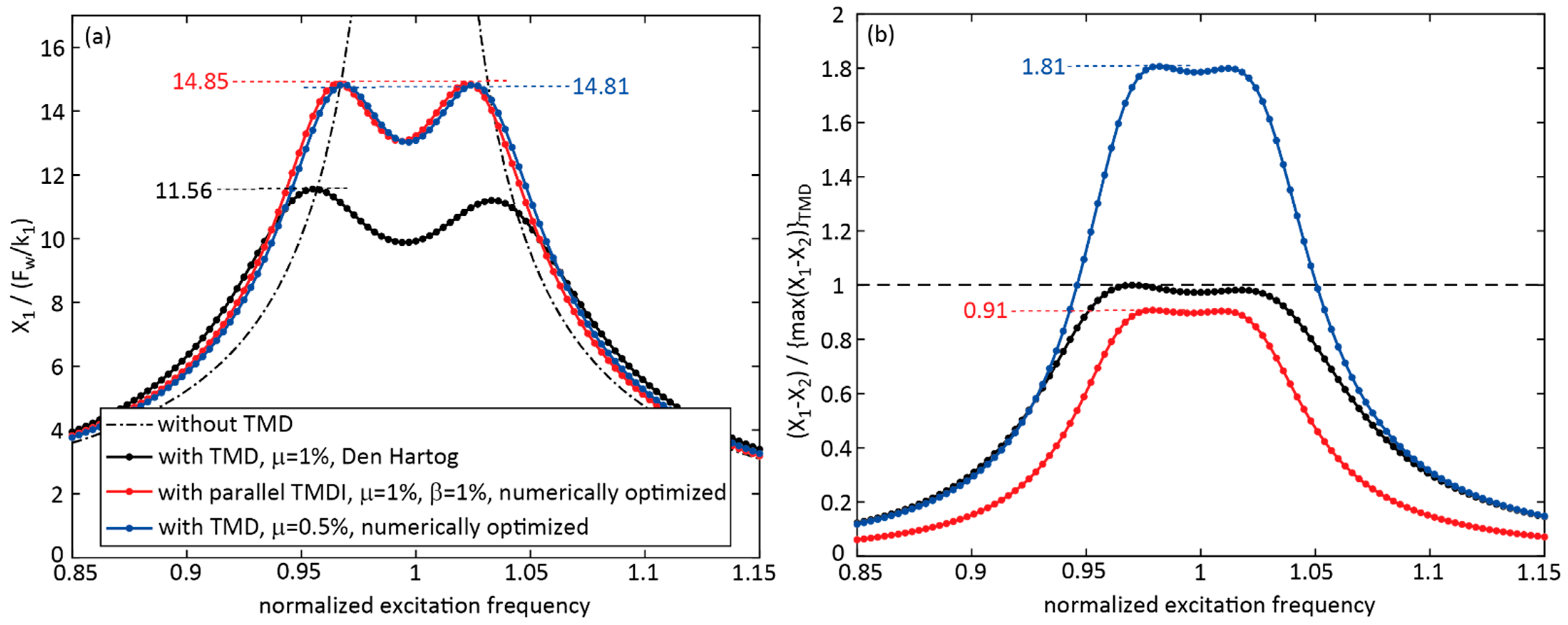
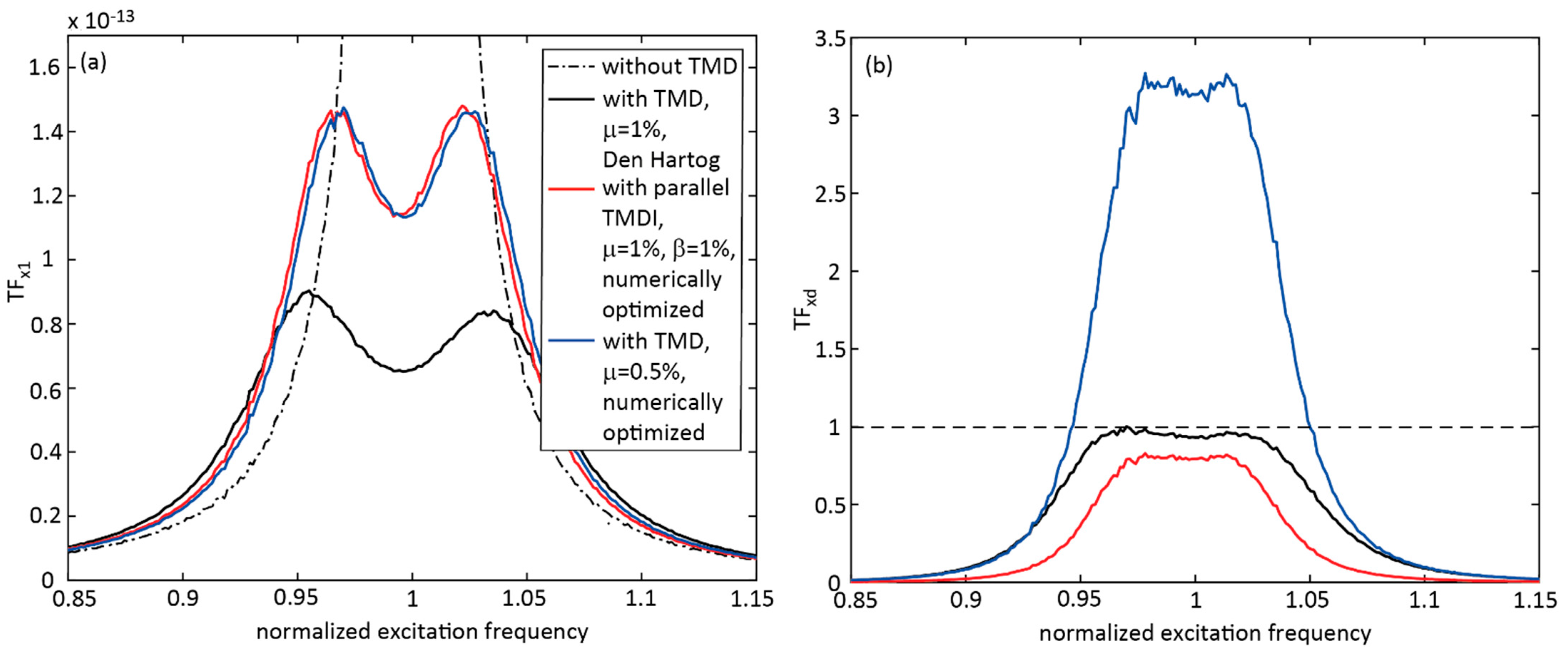
4.2. TMDI with Inerter in Parallel to Stiffness and Viscous Damper, = 1%, Numerically Optimized Parameters
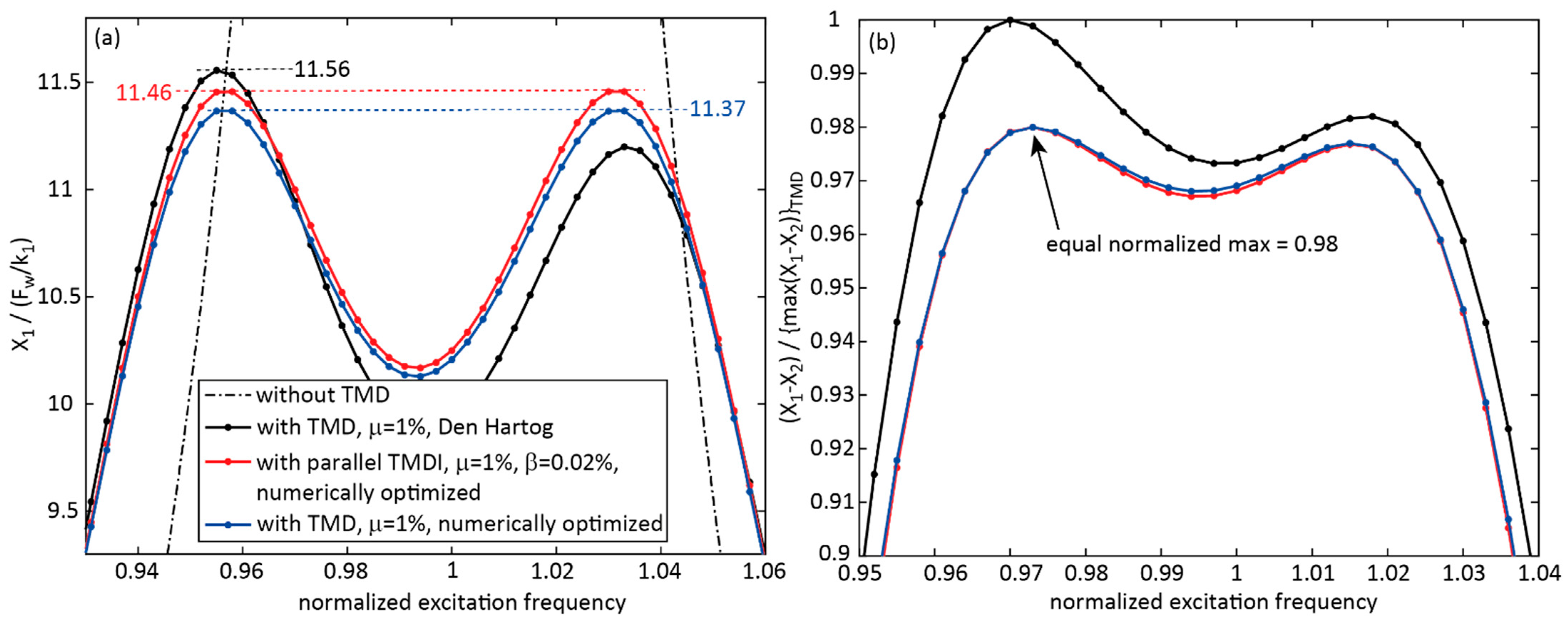
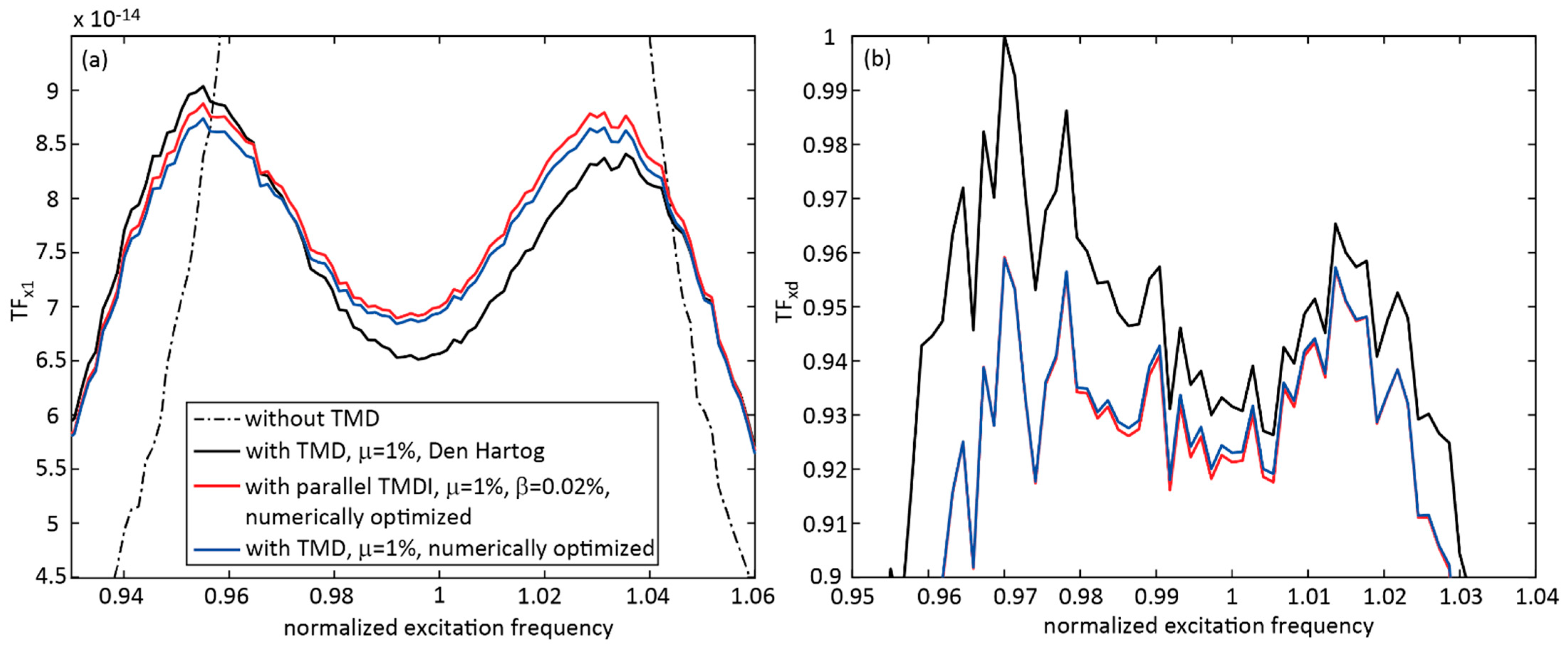
4.3. TMDI with Inerter in Parallel to Stiffness and Viscous Damper, = 0.02%, Numerically Optimized Parameters
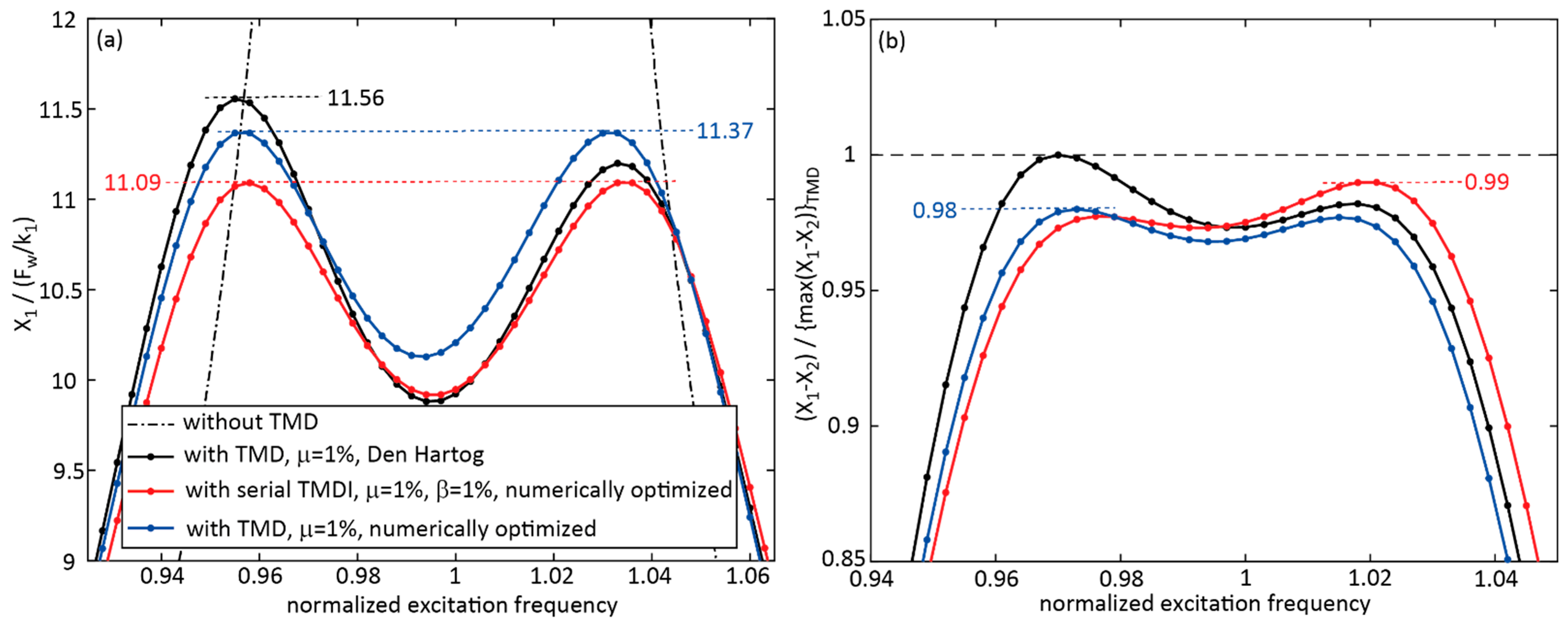
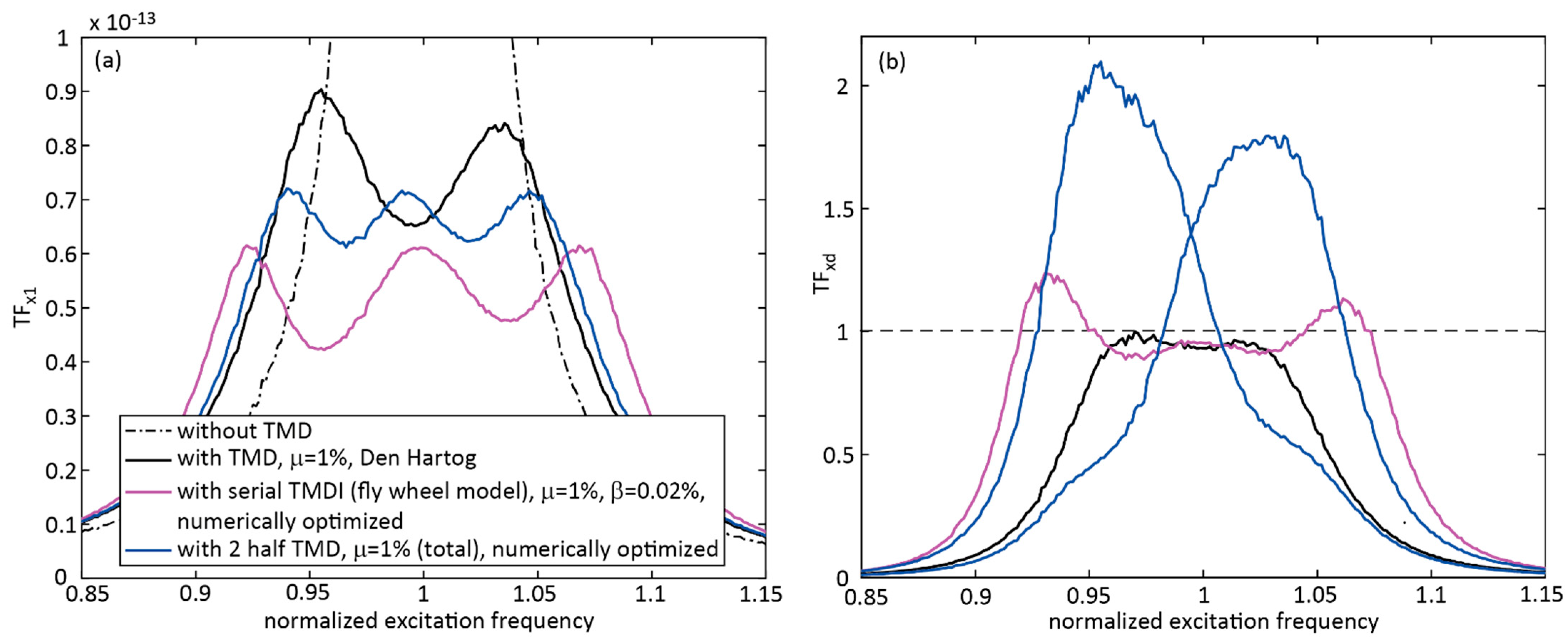
4.4. TMDI with Serial Arrangement of Stiffness, Inerter and Viscous Damper, = 1% and 0.02%, Numerically Optimized Parameters
5. Conclusions
- That the TMDI with parallel stiffness, damping and inerter and with the typical inertance ratio of 1% led to greater normalized primary structure displacement than the TMD; for harmonic excitation the maximum displacement response was 27.47% greater than the response due to the classical TMD with Den Hartog parameters;
- That the parallel TMDI with the very small inertance ratio of 0.02% led to approximately the same primary structure displacement response as the classical TMD with numerically optimized parameters;
- That if the inertance ratio of the serial TMDI is too big, then the favorable three-degrees-of-freedom dynamics are not observed and;
- That the TMDI with the serial arrangement of spring, inerter and viscous damper besides the main spring of the damper resulted in an additional degree of freedom. This system, with numerically optimized parameters and the small inertance ratio of of 0.02%, performed better than the TMD; for harmonic excitation, the structural displacement response was additionally reduced by 17.82%. This benefit must be related to the technical efforts that are needed to realize the serial arrangement of a spring, an inerter and a viscous damper without producing undesirable significant friction in the inerter and the connections between these three elements.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Den Hartog, J.P. Mechanical Vibrations; McGraw-Hill Book Company, The Maple Press Company: York, PA, USA, 1934. [Google Scholar]
- Asami, T.; Nishihara, O.; Baz, A.M. Analytical solutions to H∞ and H2 optimization of dynamic vibration absorber attached to damped linear systems. J. Vib. Acoust. 2020, 124, 284–295. [Google Scholar] [CrossRef]
- Weber, F.; Obholzer, F.; Huber, P. Model-based TMD Design for the Footbridge “Inwilerstrasse” in Switzerland and its Experimental Verification. In Proceedings of the Footbridge International Conference, Madrid, Spain, 7–9 September 2020. [Google Scholar]
- Rezende, F.; Brunet, O., Jr.; Diniz Varela, W.; Pereira, A.; Carvalho, E. Evaluation of TMD Performance in Footbridges Using Human Walking Probabilistic Models. Vibration 2021, 4, 21. [Google Scholar] [CrossRef]
- Poon, D.; Shieh, S.-S.; Joseph, L.; Chang, C.-C. Structural Design of Taipei 101, the World’s Tallest Building. In Proceedings of the CTBUH 2004 Seoul Conference, Seoul, Korea, 10–13 October 2004; pp. 271–278. [Google Scholar]
- Weber, F.; Huber, P.; Spensberger, S.; Distl, J.; Braun, C. Reduced-mass Adaptive TMD for Tall Buildings Damping. Int. J. High-Rise Build. 2019, 8, 117–123. [Google Scholar]
- HIVOSS. Design of Footbridges, Guidelines; RFS2-CT-2007-00033. Footbridge_Guidelines_EN03-08; FIB: Lausanne, Switzerland, 2008. [Google Scholar]
- HIVOSS. Design of Footbridges, Background Information; RFS2-CT-2007-00033. Footbridge_Background_EN02.doc-12.11; FIB: Lausanne, Switzerland, 2008. [Google Scholar]
- ISO 10137; Bases for Design of Structures—Serviceability of Buildings and Walkways against Vibrations. ISO: Geneva, Switzerland, 2007.
- Weber, F. Dynamic characteristics of controlled MR-STMDs of Wolgograd Bridge. Smart Mater. Struct. 2013, 22, 095008. [Google Scholar] [CrossRef]
- Meng, F.; Wan, J.; Xia, Y.; Ma, Y.; Yu, J. A Multi-Degree of Freedom Tuned Mass Damper Design for Vibration Mitigation of a Suspension Bridge. Appl. Sci. 2020, 10, 457. [Google Scholar] [CrossRef] [Green Version]
- Zhai, W.; Han, Z.; Chen, Z.; Ling, L.; Zhu, S. Train–track–bridge dynamic interaction: A state-of-the-art review. Veh. Syst. Dyn. 2019, 57, 984–1027. [Google Scholar] [CrossRef] [Green Version]
- Chapain, S.; Aly, A.M. Vibration attenuation in wind turbines: A proposed robust pendulum pounding TMD. Eng. Struct. 2021, 223, 111891. [Google Scholar] [CrossRef]
- Chen, Y.; Jin, X.; Luo, M.; Cheng, P.; Wang, S. Vibration reduction methods of large-scale wind turbines based on system-TMD coupled algorithm. Ocean. Eng. 2021, 226, 108832. [Google Scholar] [CrossRef]
- Kim, S.-M.; Wang, S.; Brennan, M.J. Robust broadband vibration control of a flexible structure using an electrical dynamic absorber. Smart Mater. Struct. 2011, 20, 75002. [Google Scholar] [CrossRef]
- Chen, Z.Y.; Jiang, R.; Wang, R.Y.; Chen, T. Active TMD systematic design of fuzzy control and the application in high-rise buildings. Earthq. Struct. 2021, 21, 577–585. [Google Scholar]
- Weber, F. Semi-active vibration absorber based on real-time controlled MR damper. Mech. Syst. Signal Processing 2014, 46, 272–288. [Google Scholar] [CrossRef]
- Weber, F.; Distl, H.; Fischer, S.; Braun, C. MR Damper Controlled Vibration Absorber for Enhanced Mitigation of Harmonic Vibrations. Actuators 2016, 5, 27. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, L.; Shi, W. Two-dimensional air spring based semi-active TMD for vertical and lateral walking and wind-induced vibration control. Struct. Eng. Mech. 2021, 80, 377–390. [Google Scholar] [CrossRef]
- Papageorgiou, C.; Houghton, N.E.; Smith, M.C. Experimental Testing and Analysis of Inerter Devices. J. Dyn. Syst. Meas. Control. 2009, 131, 011001. [Google Scholar] [CrossRef]
- John, E.D.A.; Wagg, D.J. Design and testing of a frictionless mechanical inerter device using living-hinges. J. Frankl. Inst. 2019, 356, 7650–7668. [Google Scholar] [CrossRef] [Green Version]
- Smith, M.C.; Wang, F.-C. Performance Benefits in Passive Vehicle Suspensions Employing Inerters. Veh. Syst. Dyn. 2004, 42, 235–257. [Google Scholar] [CrossRef] [Green Version]
- Baduidana, M.; Kenfack-Jiotsa, A. Optimal design of inerter-based isolators minimizing the compliance and mobility transfer function versus harmonic and random ground acceleration excitation. J. Vib. Control. 2020, 27, 1297–1310. [Google Scholar] [CrossRef]
- Krenk, S.; Høgsberg, J. Tuned resonant mass or inerter based absorbers: Unified calibration with quasi-dynamic flexibility and inertia correction. Proc. R. Soc. A 2016, 472, 20150718. [Google Scholar] [CrossRef] [Green Version]
- Chen, M.; Hu, Y. Inerter and Its Application in Vibration Control Systems; Springer Nature Singapore Pte Ltd. and Science Press: Beijing, China, 2019; Volume 472, p. 20150718. ISBN 978-981-10-7088-4. [Google Scholar]
- Krenk, S. Resonant inerter based vibration absorbers on flexible structures. J. Frankl. Inst. 2019, 356, 7704–7730. [Google Scholar] [CrossRef]
- Wagg, D.J. A review of the mechanical inerter: Historical context, physical realisations and nonlinear applications. Nonlinear Dyn. 2021, 104, 13–34. [Google Scholar] [CrossRef]
- Lazar, I.F.; Neild, S.A.; Wagg, D.J. Using an inerter-based device for structural vibration suppression. Earthq. Eng. Struct. Dyn. 2014, 43, 1129–1147. [Google Scholar] [CrossRef] [Green Version]
- Lara-Valencia, L.A.; Farbiarz-Farbiarz, Y.; Valencia-González, Y. Design of a Tuned Mass Damper Inerter (TMDI) Based on an Exhaustive Search Optimization for Structural Control of Buildings under Seismic Excitations. Shock. Vib. 2020, 2020, 8875268. [Google Scholar] [CrossRef]
- Jalali, H.H.; Maziar Farzam, F. Inerter-Connected Double Tuned Mass Damper for Passive Control of Buildings under Seismic Excitation. Period. Polytech. Civ. Eng. 2022, 66, 421–432. [Google Scholar]
- Marian, L.; Giaralis, A. Optimal design of a novel tuned mass-damper-inerter (TMDI) passive vibration control configuration for stochastically support-excited structural systems. Probabilistic Eng. Mech. 2014, 38, 156–164. [Google Scholar] [CrossRef]
- Giaralis, A.; Petrini, F. Optimum design of the tuned mass-damper-inerter for serviceability limit state performance in wind-excited tall buildings. Procedia Eng. 2017, 199, 1773–1778. [Google Scholar] [CrossRef]
- Giaralis, A.; Petrini, F. Wind-induced vibration mitigation in tall buildings using the tuned mass-damper-inerter (TMDI). J. Struct. Eng. 2017, 143, 4017127. [Google Scholar] [CrossRef]
- Zhang, Z.; Fitzgerald, B. Tuned mass-damper-inerter (TMDI) for suppressing edgewise vibrations of wind turbine blades. Eng. Struct. 2020, 221, 110928. [Google Scholar] [CrossRef]
- Barredo, E.; Larios, M.; Mayén, J.; Flores-Hernández, A.A.; Colín, J.; Arias-Montiel, M. Optimal design for high-performance passive dynamic vibration absorbers under random excitation. Eng. Struct. 2019, 195, 469–489. [Google Scholar] [CrossRef]
- Barredo, E.; Larios, M.; Colín, J.; Mayén, J.; Flores-Hernández, A.A.; Arias-Montiel, M. A novel high-performance passive non-traditional inerter-based dynamic vibration absorber. J. Sound Vib. 2020, 485, 115583. [Google Scholar] [CrossRef]
- Alotta, G.; Failla, G. Improved inerter-based vibration absorbers. Int. J. Mech. Sci. 2021, 192, 106087. [Google Scholar] [CrossRef]
- Dai, J.; Xu, Z.D.; Gai, P.P. Tuned mass-damper-inerter control of wind-induced vibration of flexible structures based on inerter location. Eng. Struct. 2019, 199, 109585. [Google Scholar] [CrossRef]
- Weber, F.; Huber, P.; Borchsenius, F.; Braun, C. Performance of TMDI for Tall Building Damping. Actuators 2020, 9, 139. [Google Scholar] [CrossRef]
- Meirovitch, L. Fundamentals of Vibrations; McGraw-Hill: New York, NY, USA, 2001. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Modal Mass | Eigenfrequency | Damping Ratio | Stiffness Coefficient | Viscous Damping Coefficient |
|---|---|---|---|---|
| 50,000 | 0.14 | 1% | 38.689 | 879.65 |
| Damper Type | Mass Ratio | Tuning | Natural Frequency | Damping Ratio | Stiffness Coefficient | Viscous Damping Coefficient |
|---|---|---|---|---|---|---|
| TMD | 1% | Den Hartog | 0.1386 | 6.03% | 379.27 | 53.069 |
| TMD | 1% | Overdamped | 0.1386 | 2.3434 × 6.03% | 379.27 | 2.3434 × 53.069 |
| TMD | 0.5% | Numerically optimized | NA | NA | 191.12 | 19.134 |
| TMD | 1% | Numerically optimized | NA | NA | 378.11 | 54.648 |
| Two half TMDs | 1% (total) | Numerically optimized | = 178.36 kN/m | = 17.123 kNs/m | = 201.62 kN/m | = 19.463 kNs/m |
| Damper Type | Mass Ratio | Inertance Ratio | Tuning | Natural Frequency | Damping Ratio | Stiffness Coefficient | Viscous Damping Coefficient |
|---|---|---|---|---|---|---|---|
| Parallel TMDI | 1% | 1% | [33] | 0.1379 | 7.02% | 751.17 | 121.66 |
| Parallel TMDI | 1% | 1% | Numerically optimized | NA | NA | 760.64 | 76.151 |
| Parallel TMDI | 1% | 0.02% | Numerically optimized | NA | NA | 385.77 | 54.919 |
| Damper Type | Mass Ratio | Inertance Ratio | Tuning | Stiffness Coefficient | Stiffness Coefficient | Viscous Damping Coefficient |
|---|---|---|---|---|---|---|
| Serial TMDI | 1% | 1% | Numerically optimized | 347.47 | 80.103 | 76.288 |
| Serial TMDI | 1% | 0.02% | Numerically optimized | 378.17 | 7.6402 | 50.441 |
| Serial TMDI (fly wheel) | 1% | 0.02% | Numerically optimized | 377.40 | 8.1045 | 50.275 |
| Mass of Housing and Gear Rod (kg) | Radius of Fly Wheel (m) | Thickness of Fly Wheel (m) | Gear Radius of Fly Wheel (m) | Mass of Fly Wheel (kg) | Mass of Fly Wheel, Steel Rod, Axle (kg) |
|---|---|---|---|---|---|
| = 500 | 0.7 | 0.28 | 0.288 | 3388 | = 3500 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Weber, F.; Borchsenius, F.; Distl, J.; Braun, C. Performance of Numerically Optimized Tuned Mass Damper with Inerter (TMDI). Appl. Sci. 2022, 12, 6204. https://doi.org/10.3390/app12126204
Weber F, Borchsenius F, Distl J, Braun C. Performance of Numerically Optimized Tuned Mass Damper with Inerter (TMDI). Applied Sciences. 2022; 12(12):6204. https://doi.org/10.3390/app12126204
Chicago/Turabian StyleWeber, Felix, Fredrik Borchsenius, Johann Distl, and Christian Braun. 2022. "Performance of Numerically Optimized Tuned Mass Damper with Inerter (TMDI)" Applied Sciences 12, no. 12: 6204. https://doi.org/10.3390/app12126204
APA StyleWeber, F., Borchsenius, F., Distl, J., & Braun, C. (2022). Performance of Numerically Optimized Tuned Mass Damper with Inerter (TMDI). Applied Sciences, 12(12), 6204. https://doi.org/10.3390/app12126204