
A Sensing Mechanism and the Application of a Surface-Bonded FBG Dynamometry Bolt



Abstract
:1. Introduction
2. The Sensing Theory of FBG Dynamometry Bolt
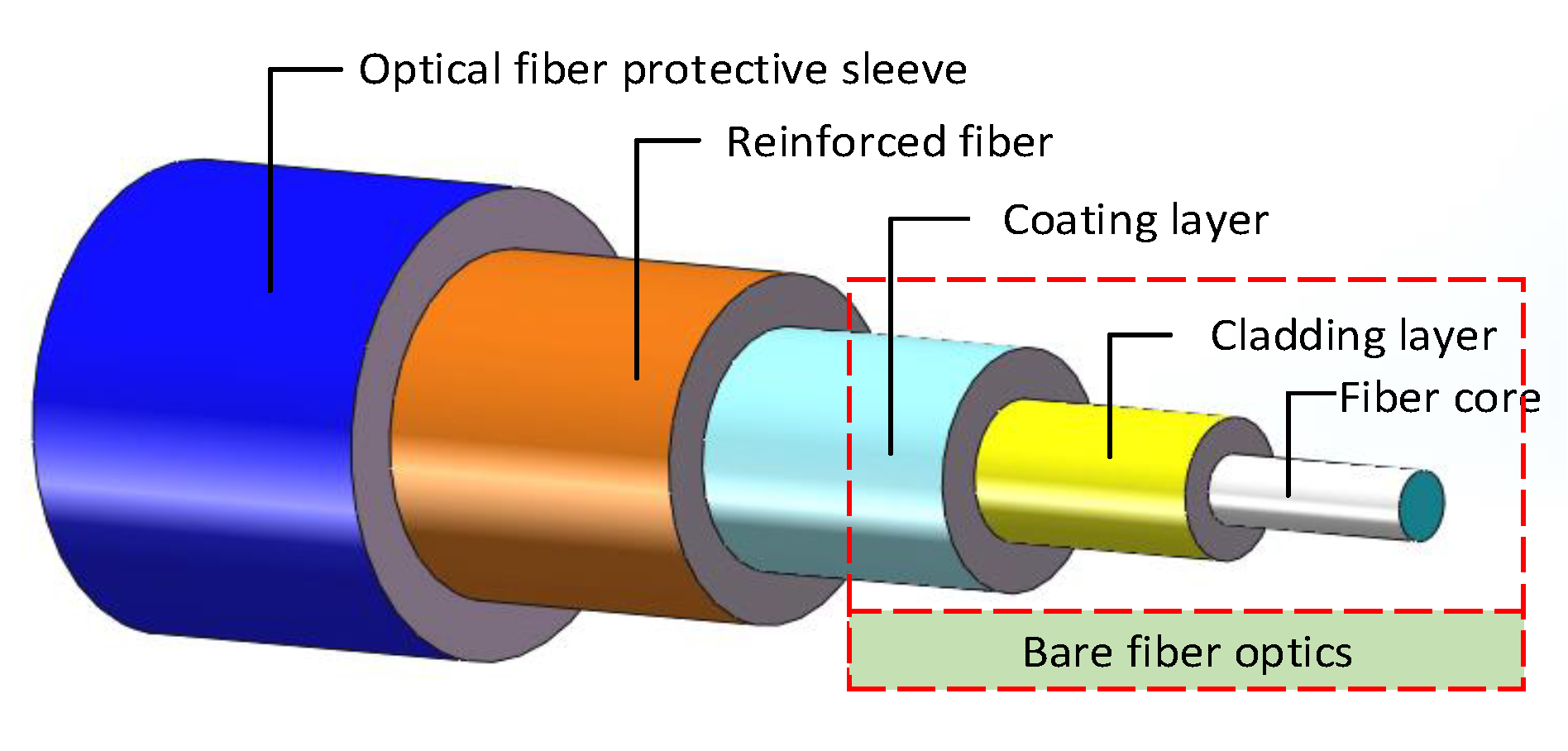
2.1. Optical Fiber Sensing Principle
2.2. Design of FBG Dynamometry Bolt
2.2.1. Design Principles
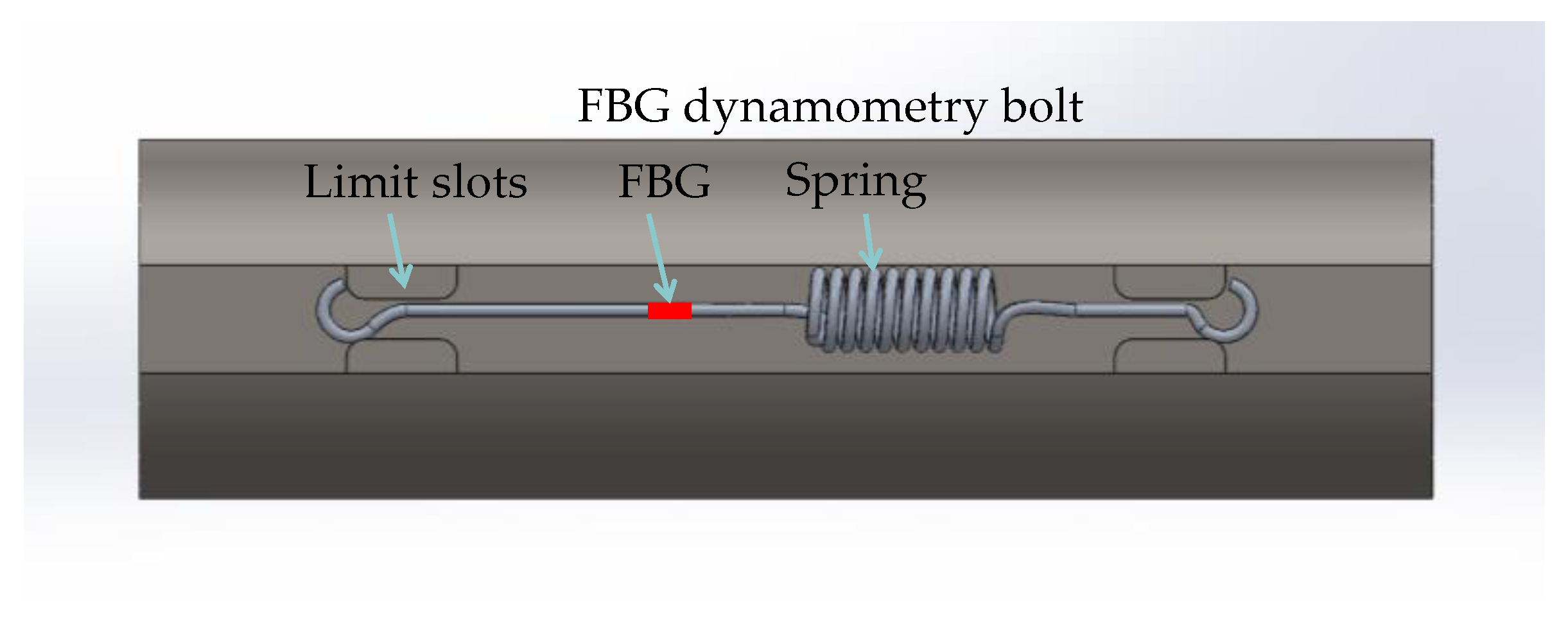
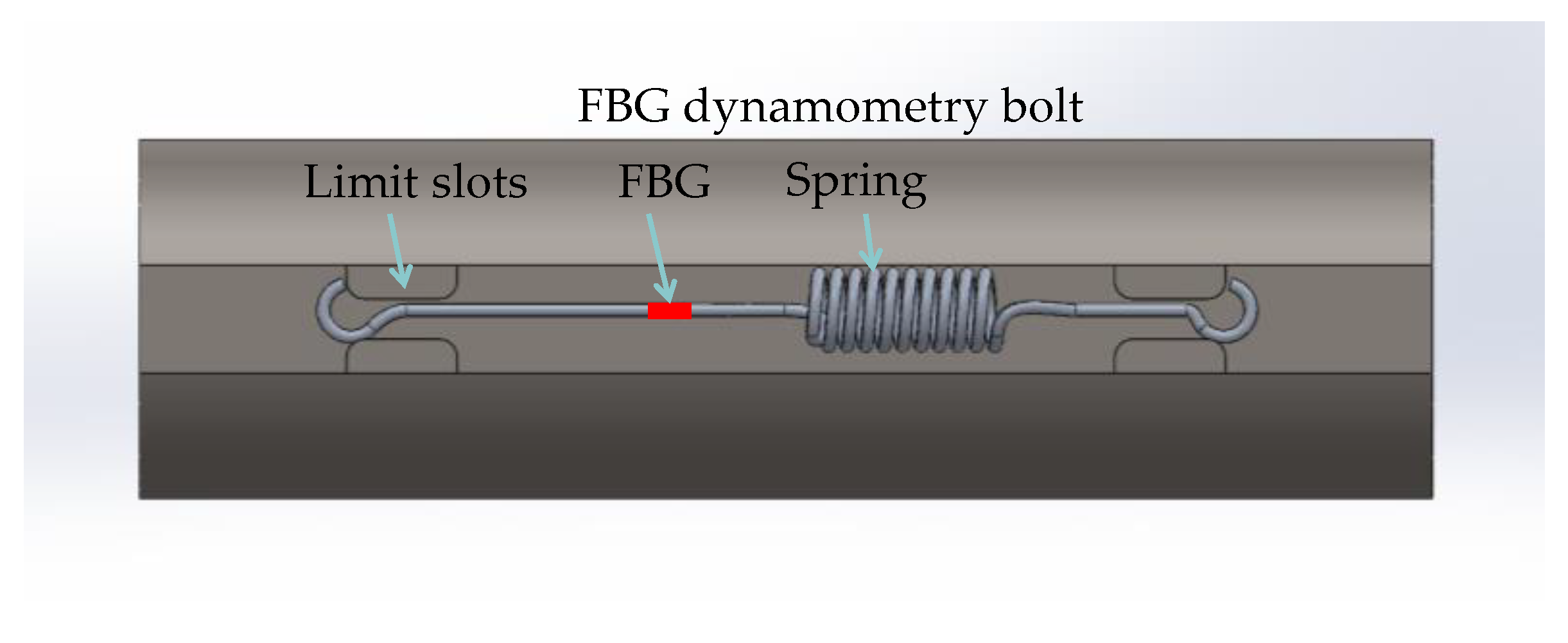
2.2.2. The Structure of the FBG Dynamometry Bolt
2.3. The Working Principle of the FBG Dynamometry Bolt
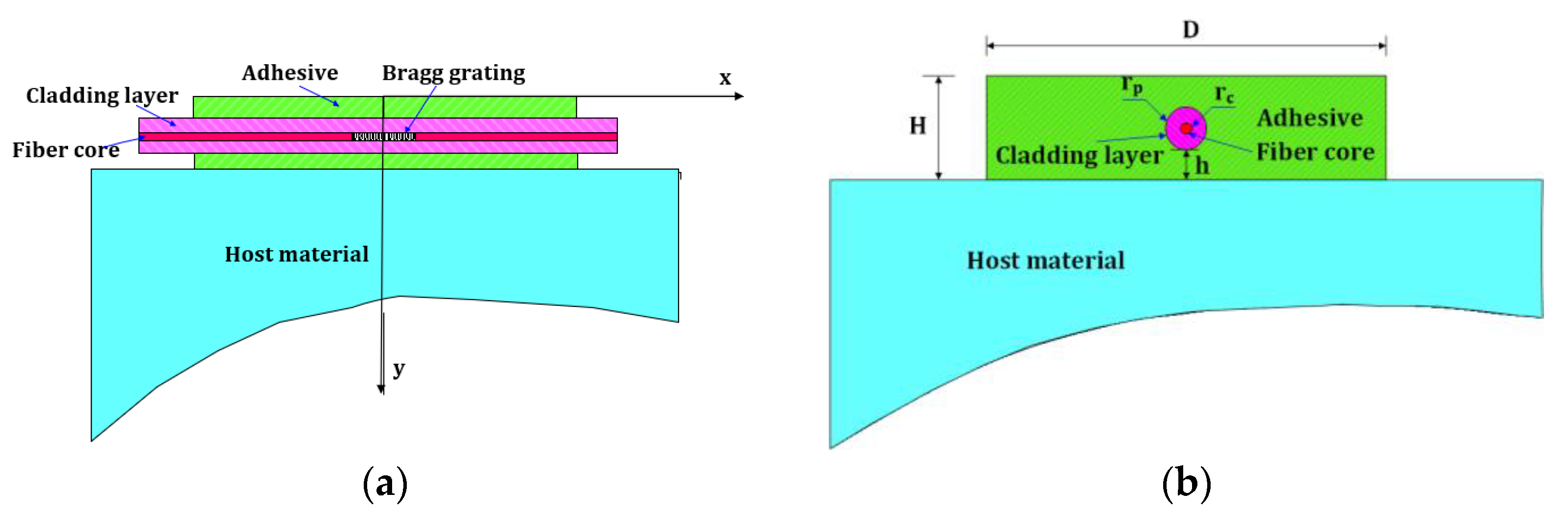
3. Strain Transfer Efficiency of the Surface-Bonded FBG Sensor
3.1. Strain Analysis Model of the FBG Sensor
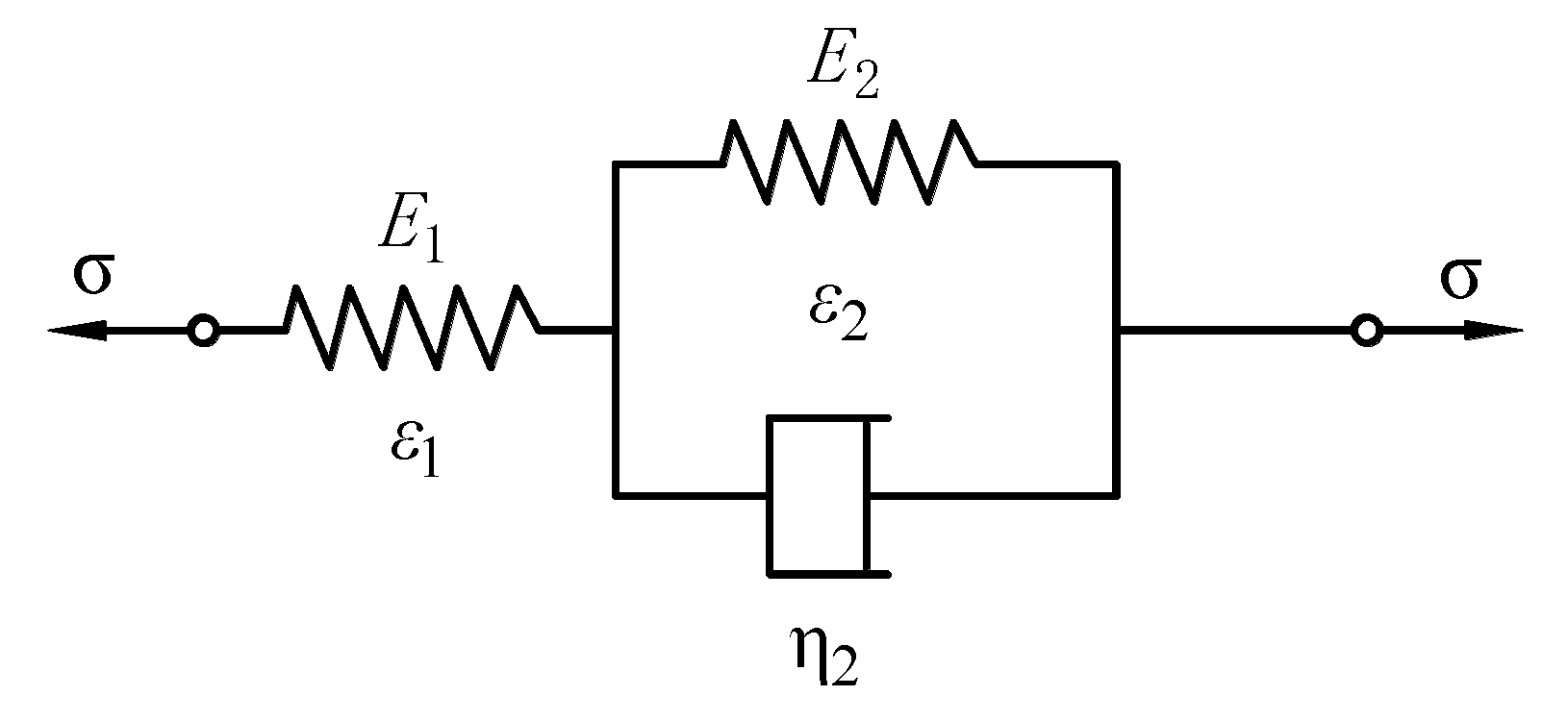
3.2. Analysis of the Mechanical Model of the Adhesive Layer
4. Characteristic Test and Analysis of the FBG Dynamometry Bolt
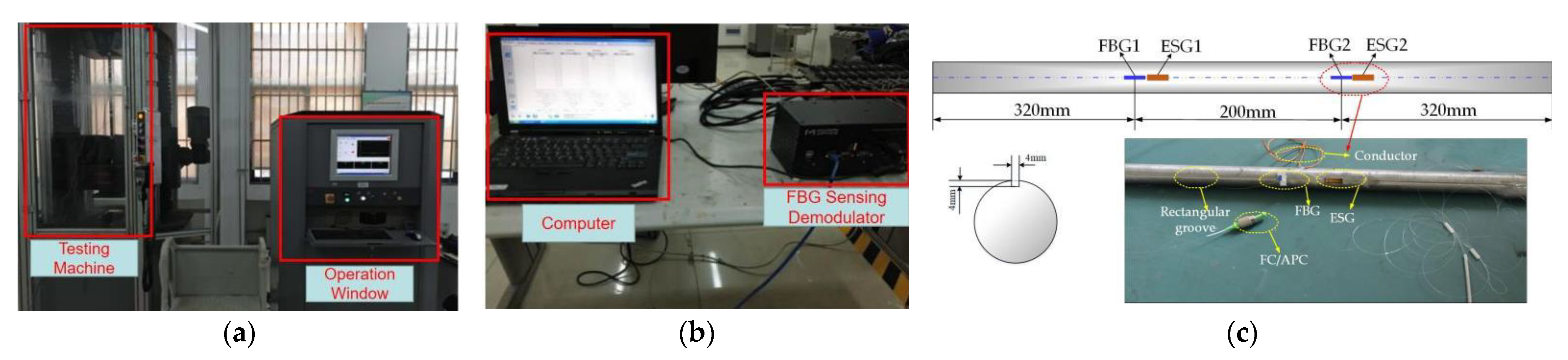
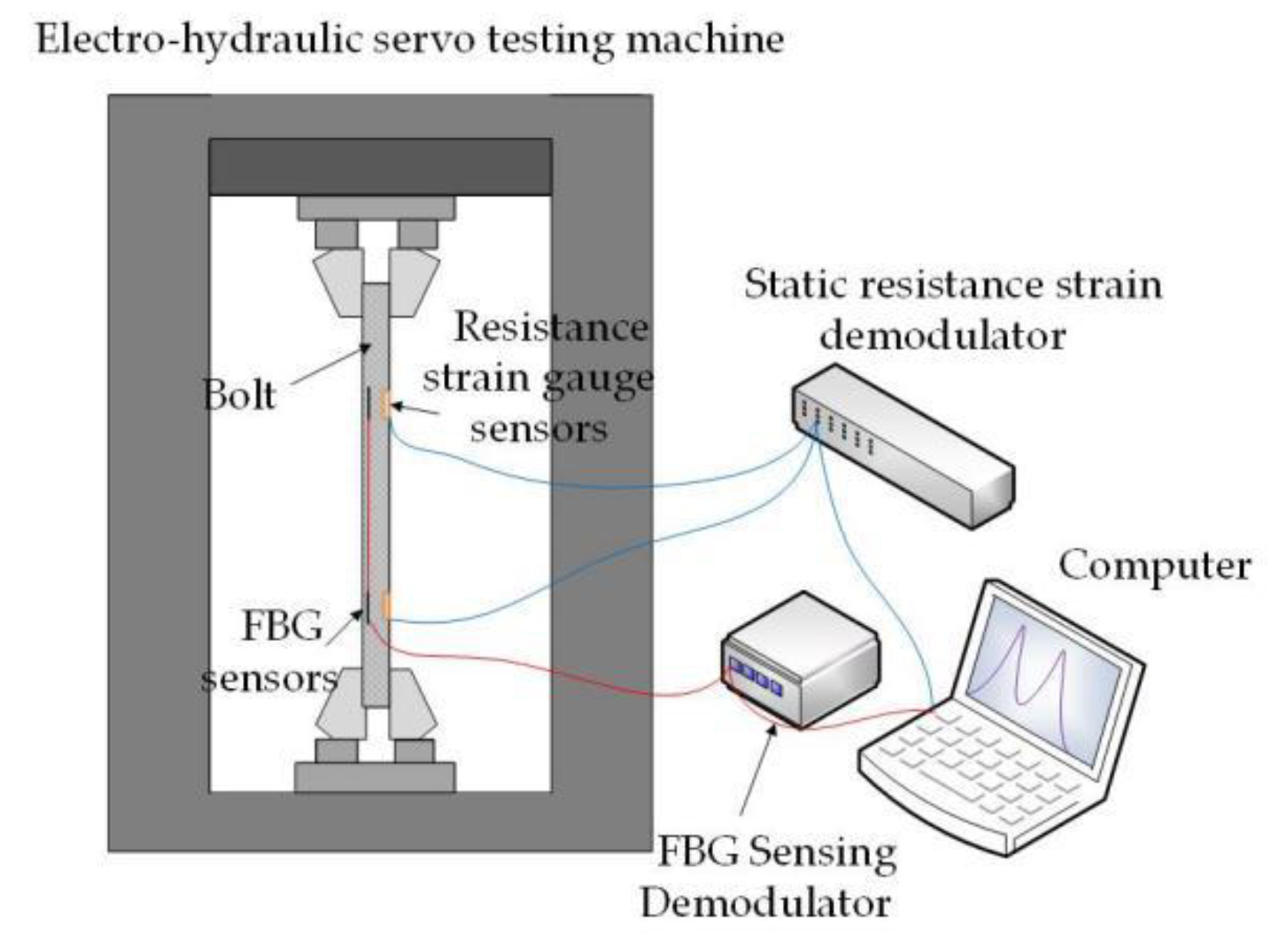
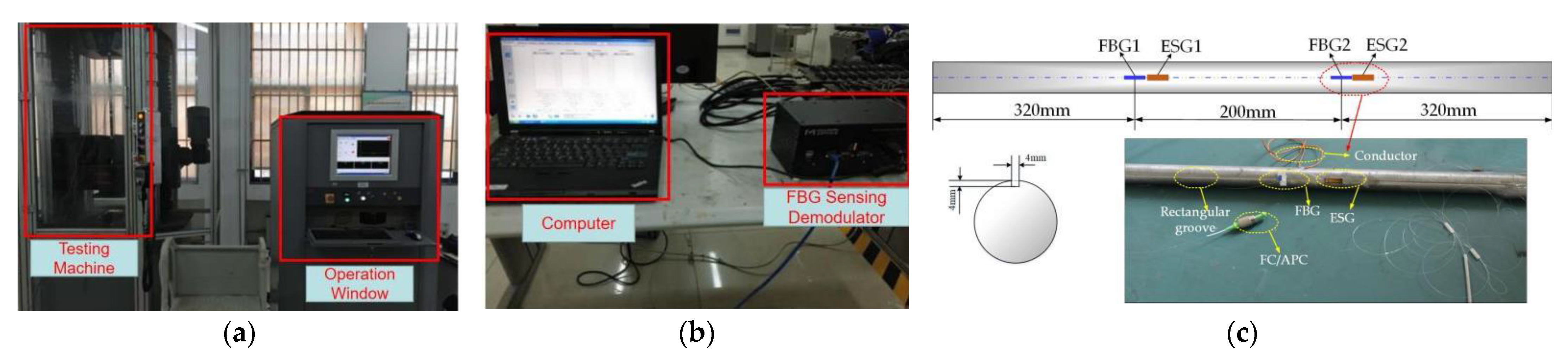
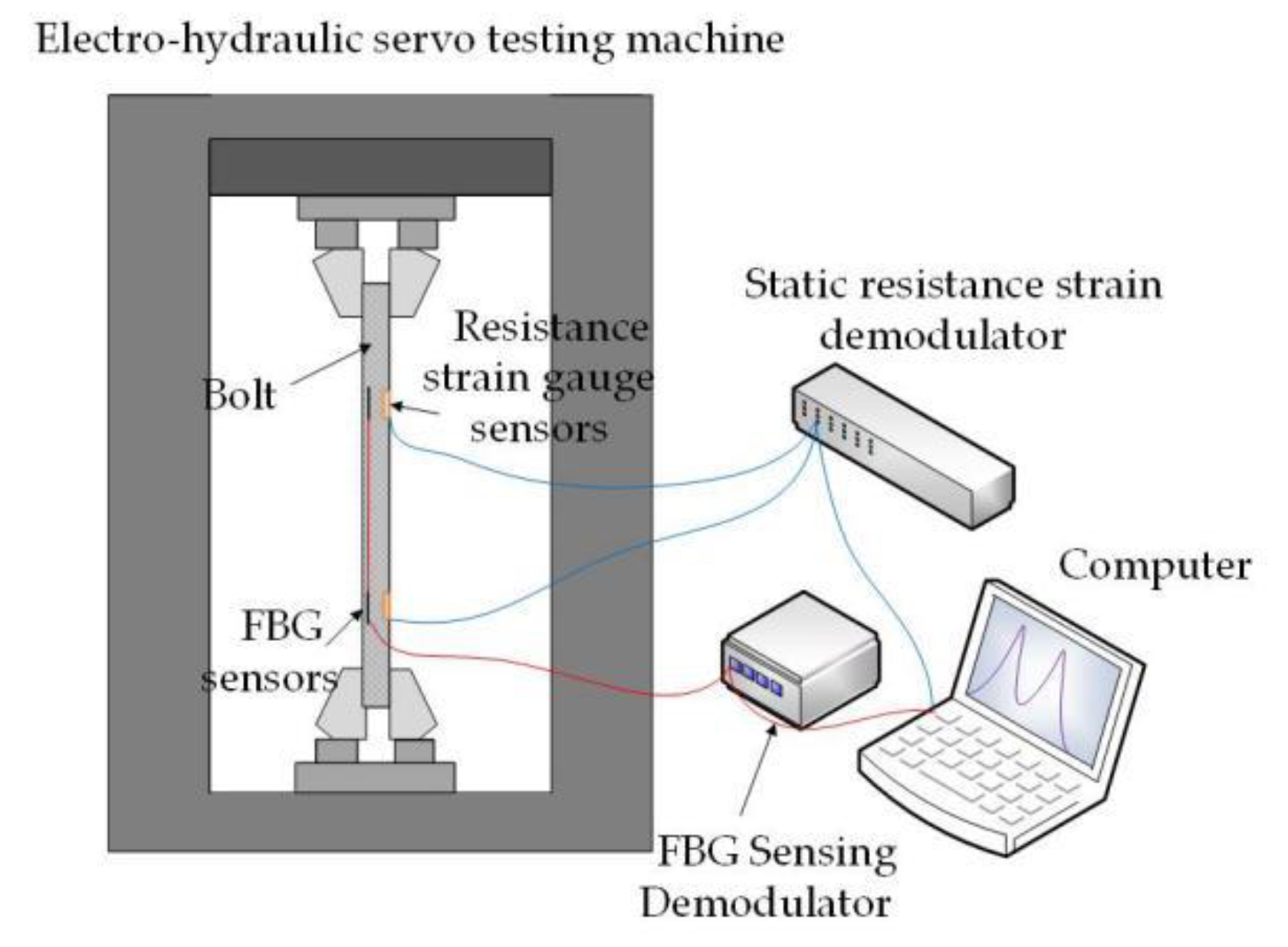
4.1. Tensile Test of the Dynamometry Bolt
4.2. Test Scheme
- Connected and debugged the instrument: the FBG static demodulator was connected to the computer through the network cable and completed the debugging on the demodulation software, and the data storage path was set. The resistance strain gauge was connected to the computer through an RS485 bus, zeroed, and calibrated, and the data storage path was set at the same time.
- Set the loading methods: in test I, the loading test machine was set to load at the rate of 5 mm/min, and maintained this for 2 min when it was loaded to 5 kN, and then it continued to perform the loading method. At this time, the measurement data of the resistance strain gauge and the FBG sensor were recorded and stored until the data could not be collected on the FBG sensing demodulator and resistance strain gauge. In test II, the loads were, respectively, loaded to 120 kN, 140 kN, and 160 kN within 1 min (the tensile force of the bolt sample when it yielded was measured to be 170 kN during the pre-test), and the load was kept unchanged. After maintaining for 2 h, the load was then unloaded to 5 kN within 1 min.
- The bolt sample was clamped and prepared for the test: first, the upper clamp of the testing machine was opened, the sample was placed into the clamp groove, and then the upper clamp was closed to clamp the sample. Then, the lower clamp of the testing machine was opened, the lower clamp was raised to the end of the sample through the remote control switch, and then the lower clamp was closed to clamp the sample.
- Begin the test: the testing machine, the FBG demodulator, and the resistance strain gauge demodulator recorded the measurement data at the same time.
- The data was exported from the computer and saved.
4.3. Test Results and Discussion
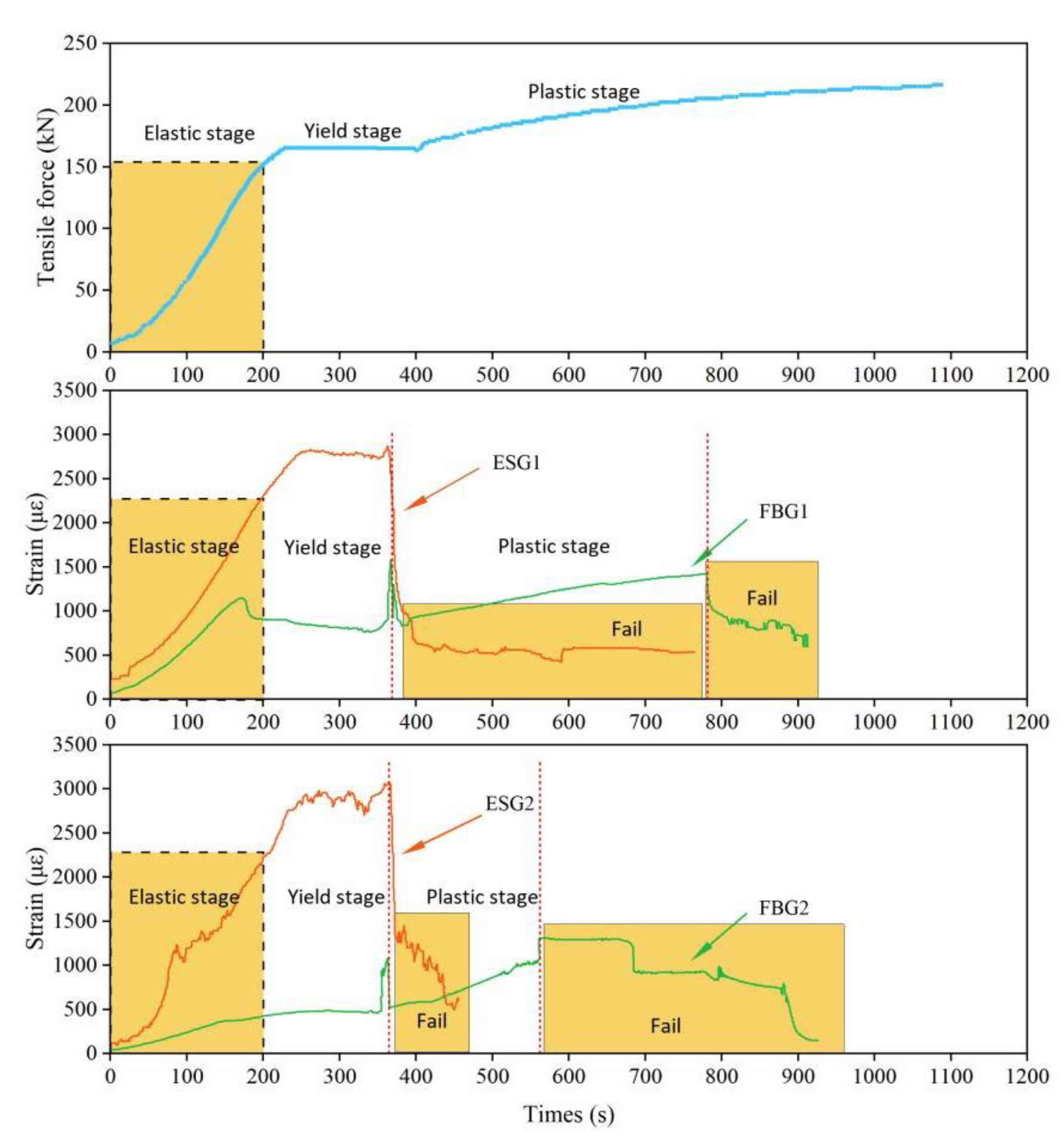
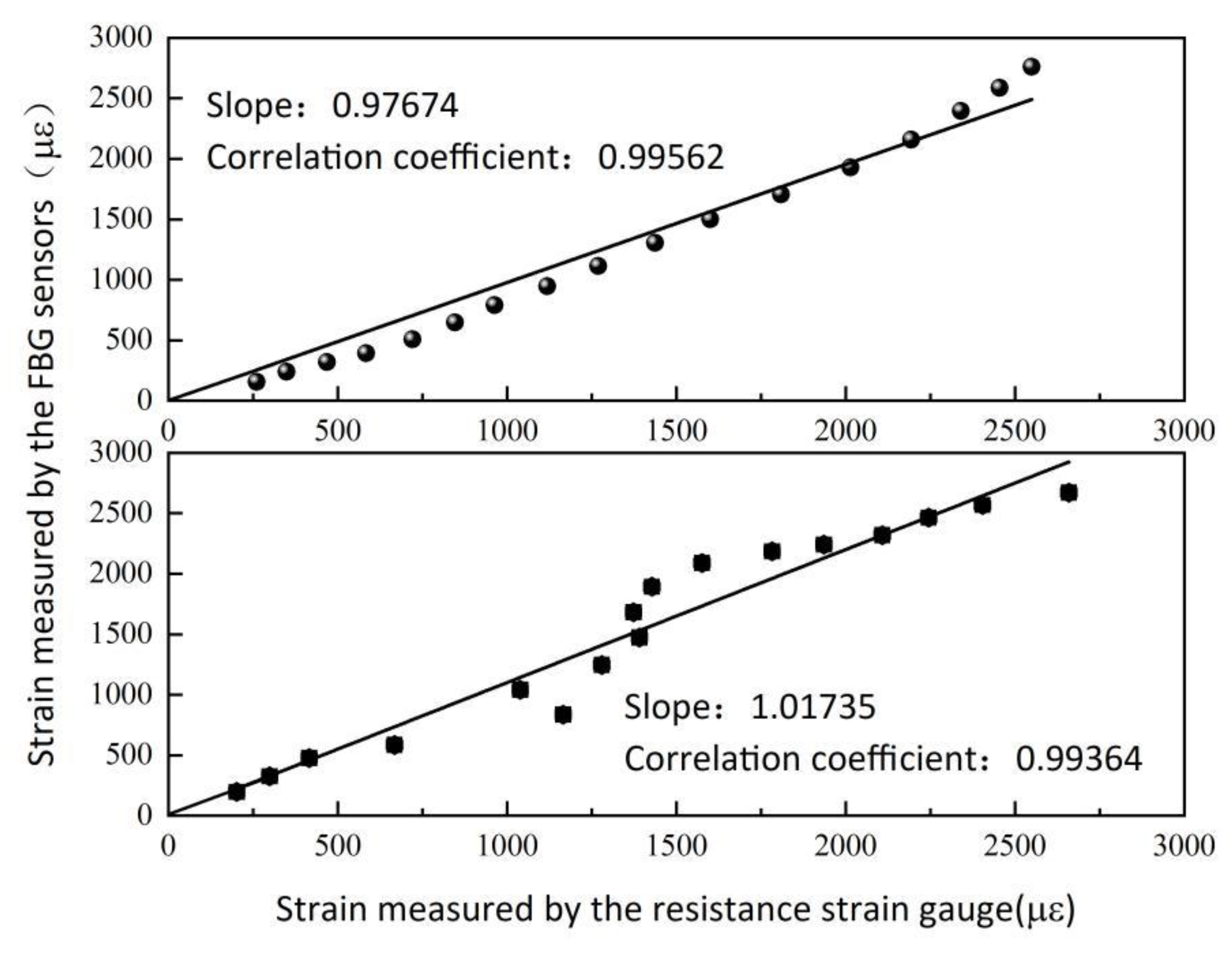
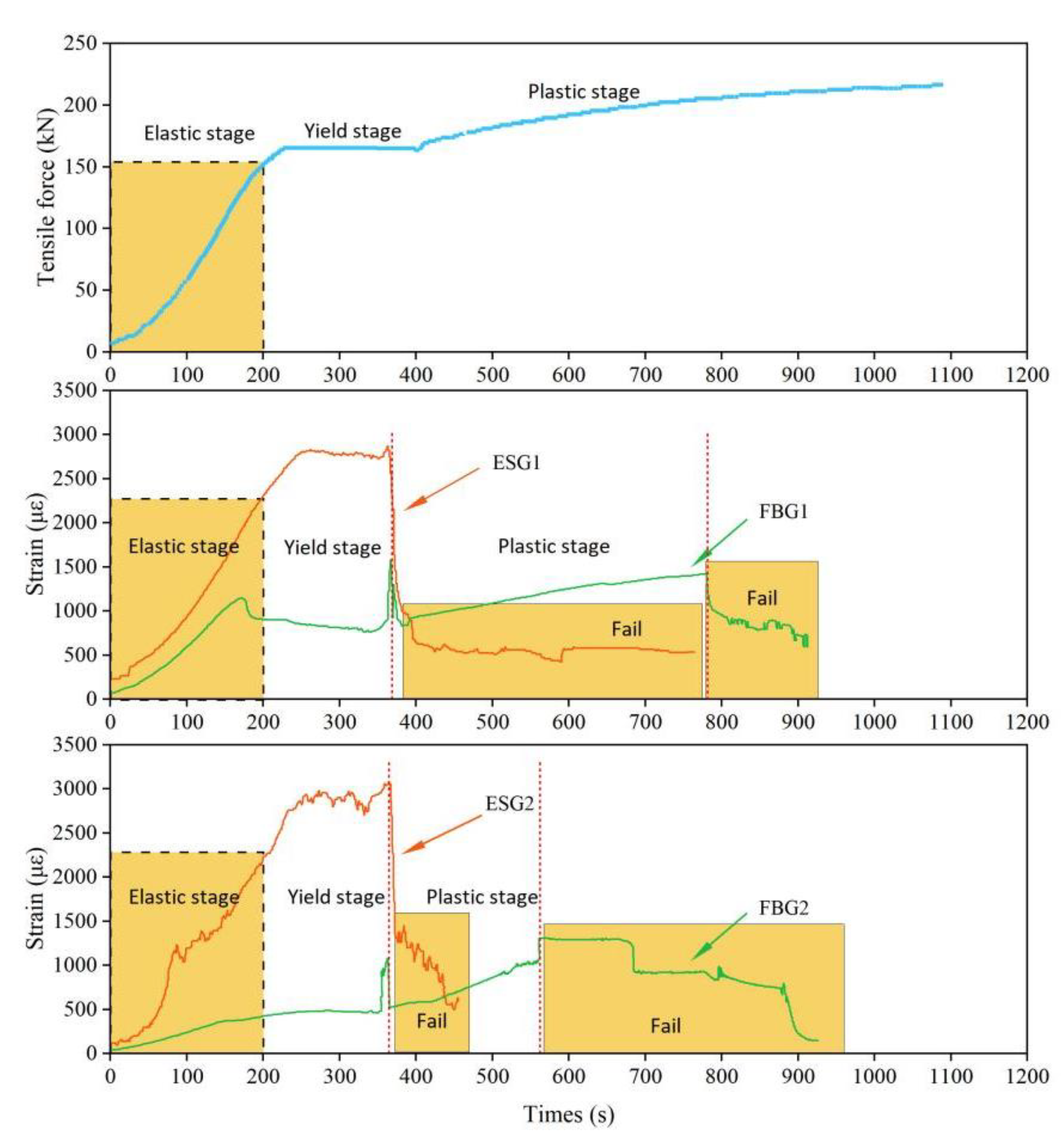
4.3.1. Analysis of the Results and Discussion of Test I
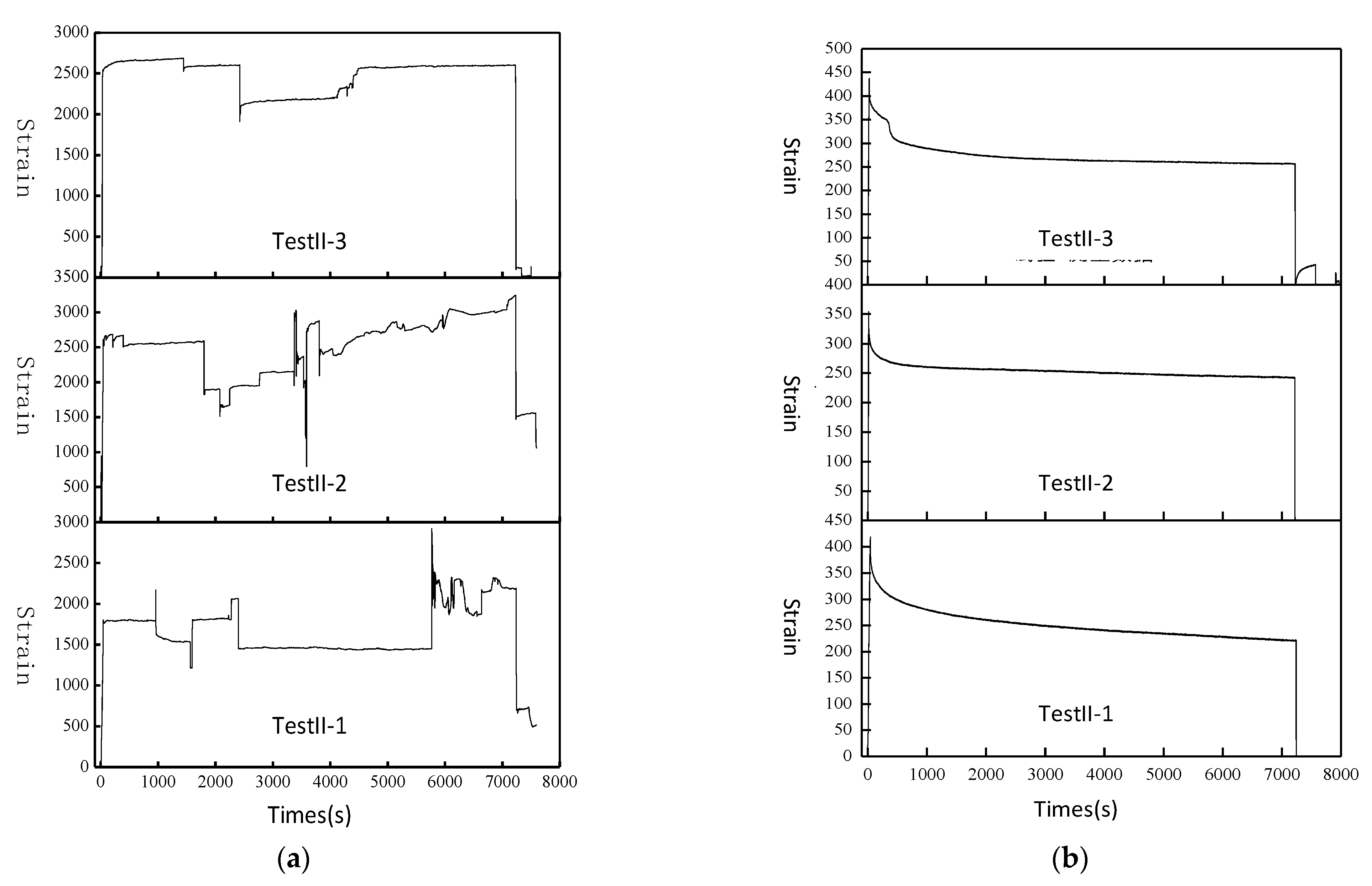
4.3.2. Results Analysis and Discussion of Test II
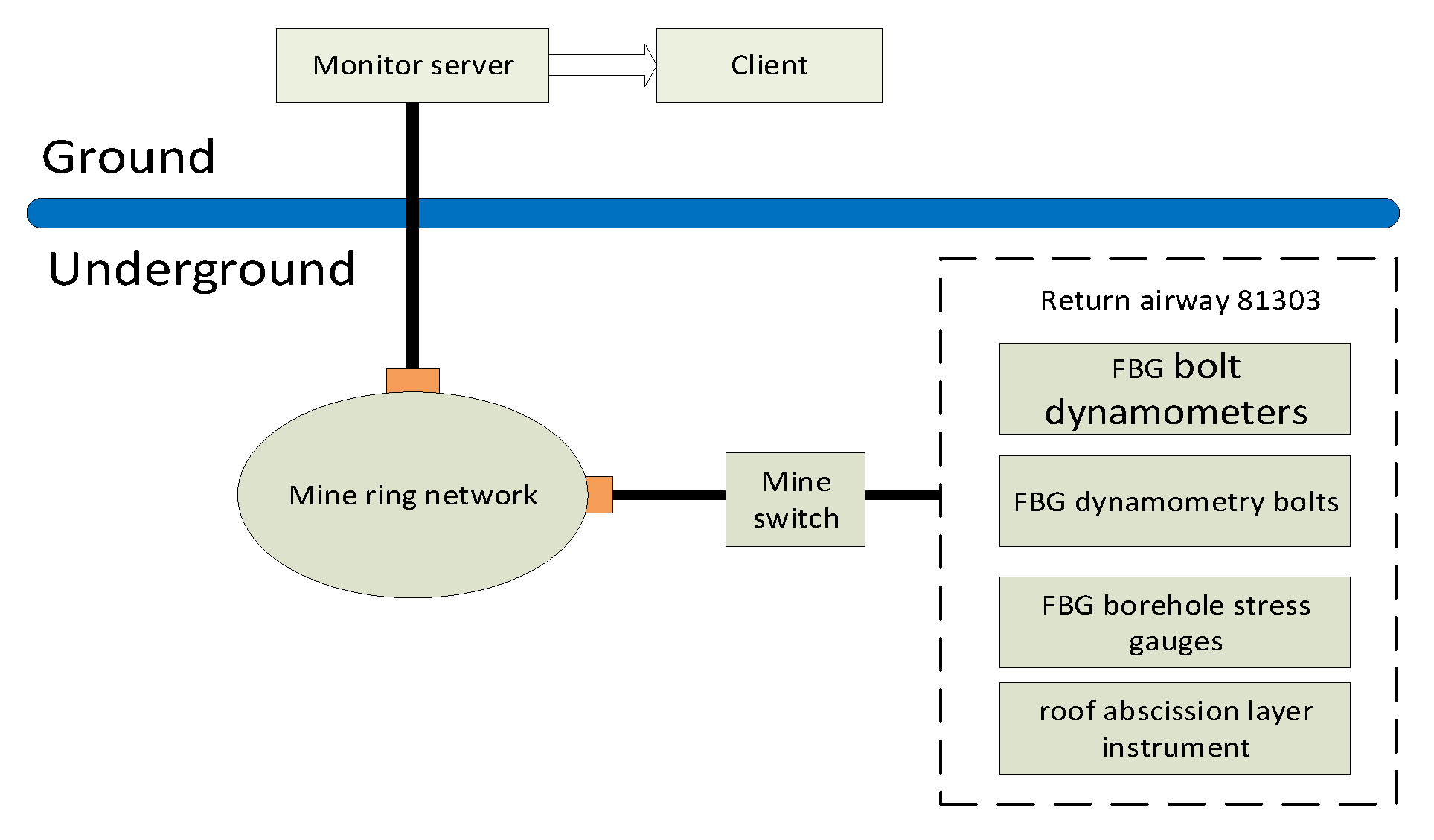
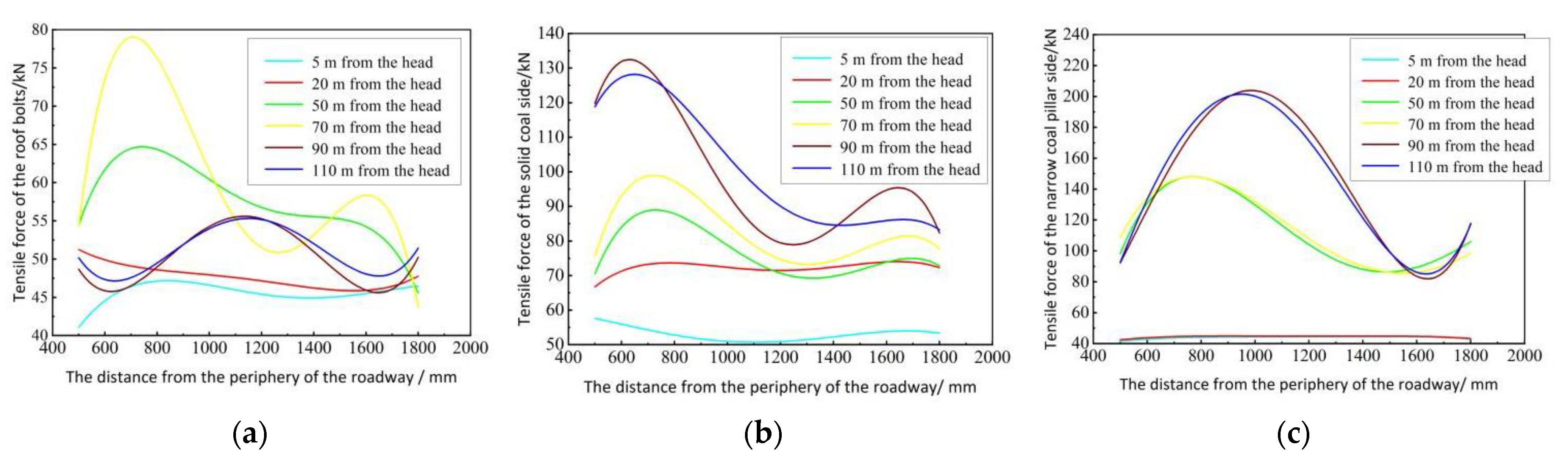
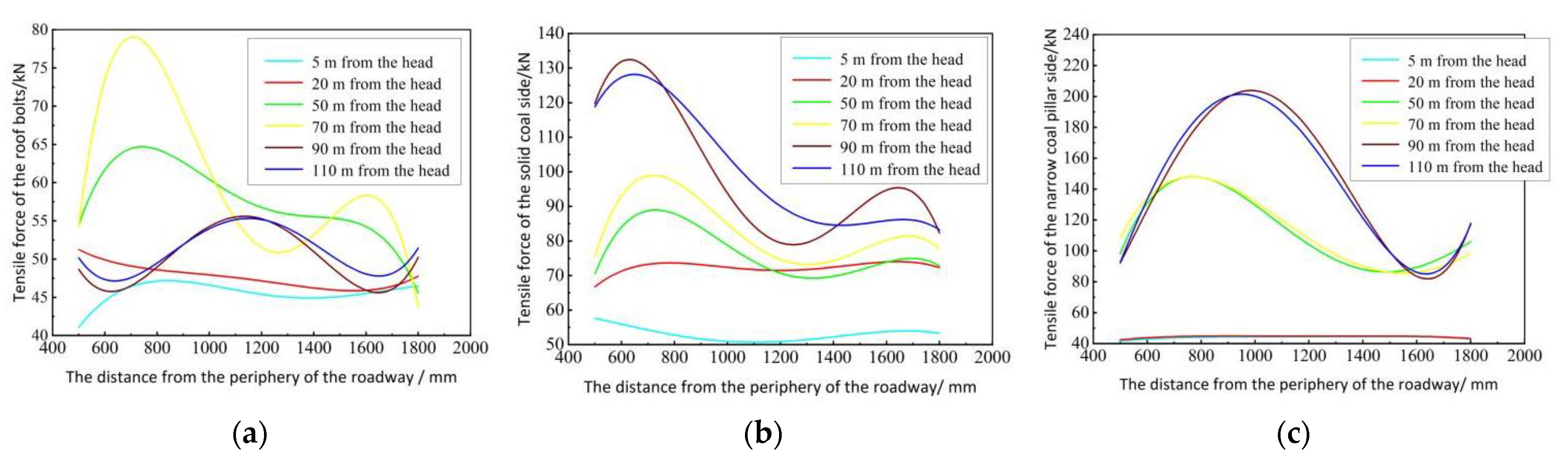
5. Engineering Application
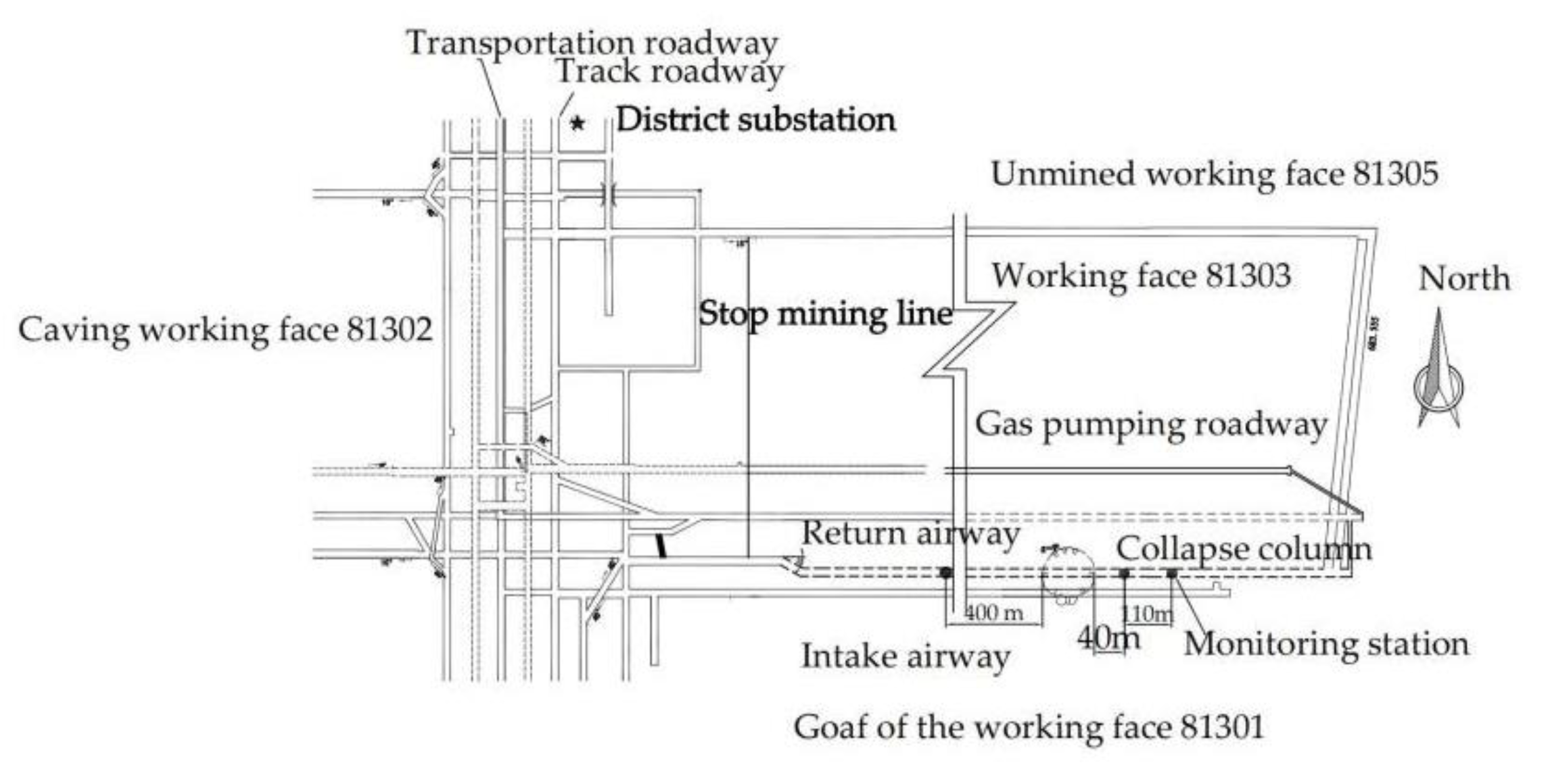
5.1. Engineering Background
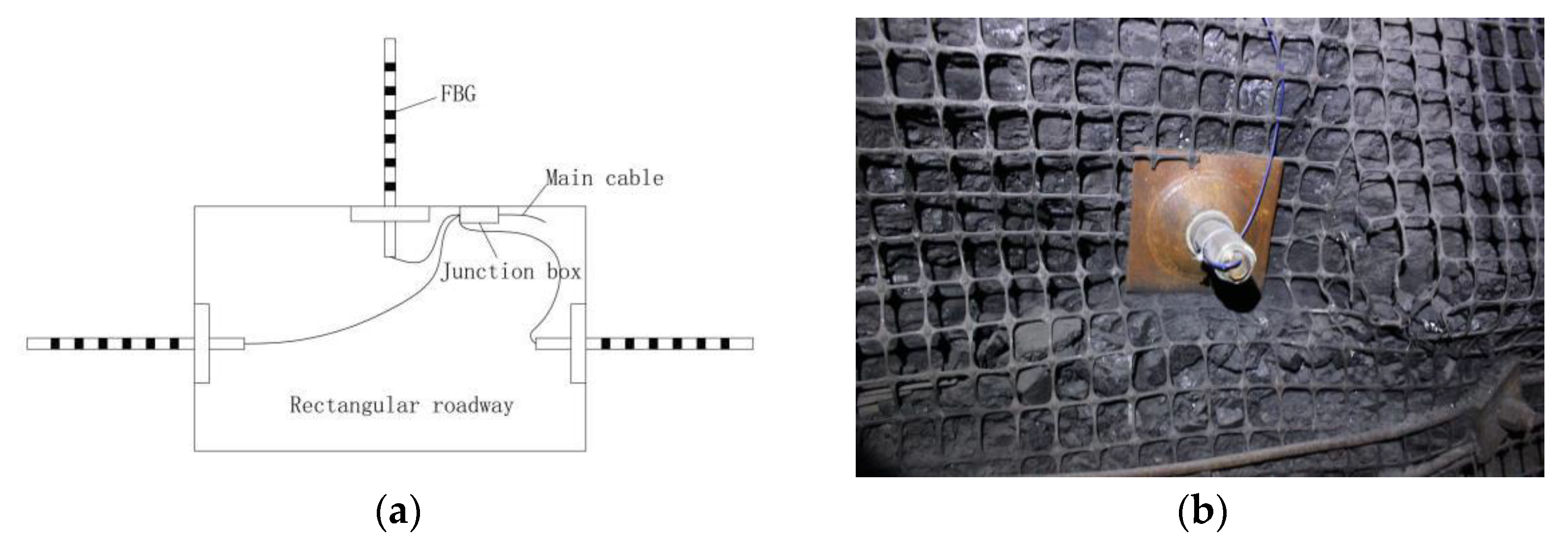
5.2. Monitoring Data Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Xie, H.P.; Gao, M.Z.; Zhang, R.; Peng, G.Y.; Wang, W.Y.; Li, A.Q. Study on the Mechanical Properties and Mechanical Response of Coal Mining at 1000 m or Deeper. Rock Mech. Rock Eng. 2019, 52, 1475–1490. [Google Scholar] [CrossRef]
- Kang, H.P. Seventy years development and prospects of strata control technologies for coal mine roadways in China. Chin. J. Rock Mech. Eng. 2020, 1, 1–30. [Google Scholar]
- Ivanovic, A.; Starkey, A.; Neilson, R.D.; Rodger, A.A. The influence of load on the frequency response of rock bolt anchorage. Adv. Eng. Softw. 2003, 34, 697–705. [Google Scholar] [CrossRef]
- Cheng, J.L.; Sun, X.Y.; Feng, L.; Yuan, Y.B. Experimental study on non-destructive testing of rock bolts based on pseudo-random signal. Saf. Sci. 2012, 50, 783–786. [Google Scholar] [CrossRef]
- Hu, X.W.; Zhang, P.S.; Cheng, H.; Wu, R.X.; Guo, L.Q. Quantitative assessment of interference induced by roof bolt during advanced detection with transient electromagnetic method in mine. Chin. J. Rock Mech. Eng. 2013, 32, 3275–3282. [Google Scholar]
- Ding, S.X.; Jing, H.W.; Chen, K.F.; Xu, G.A.; Meng, B. Stress evolution and support mechanism of a bolt anchored in a rock mass with a weak interlayer. Int. J. Min. Sci. Technol. 2017, 27, 573–580. [Google Scholar] [CrossRef]
- Zhao, Z.G.; Zhang, Y.J.; Li, C.; Wan, Z.; Li, Y.N.; Wang, K.; Xu, J.F. Monitoring of coal mine roadway roof separation based on fiber Bragg grating displacement sensors. Int. J. Rock Mech. Min. 2015, 72, 128–132. [Google Scholar] [CrossRef]
- Gong, H.K.; Kizil, M.S.; Chen, Z.W.; Amanzadeh, M.; Yang, B.; Aminossadati, S.M. Advances in fibre optic based geotechnical monitoring systems for underground excavations. Int. J. Min. Sci. Technol. 2019, 29, 229–238. [Google Scholar] [CrossRef]
- Yan, H.; Zhang, J.X.; Zhou, N.; Li, M. Application of hybrid artificial intelligence model to predict coal strength alteration during CO2 geological sequestration in coal seams. Sci. Total Environ. 2020, 711, 135029. [Google Scholar] [CrossRef] [PubMed]
- Wang, J.Y.; Liu, T.Y.; Wang, C.; Liu, X.H.; Huo, D.H.; Chang, J. A micro-seismic fiber Bragg grating (FBG) sensor system based on a distributed feedback laser. Meas. Sci. Technol. 2010, 21, 094012. [Google Scholar] [CrossRef]
- Chai, J.; Liu, Q.; Liu, J.X.; Zhang, G.H.; Zhang, D.D.; Qiu, F.Q. Assessing the Difference in Measuring Bolt Stress: A Comparison of Two Optical Fiber Sensing Techniques. J. Sens. 2018, 2018, 7582605. [Google Scholar]
- Wang, P.; Zhang, N.; Kan, J.G.; Xie, Z.Z.; Wei, Q.; Yao, W.H. Fiber Bragg Grating Monitoring of Full-bolt Axial Force of the Bolt in the Deep Strong Mining Roadway. Sensors 2020, 20, 4242. [Google Scholar] [CrossRef] [PubMed]
- Duck, G.; Renaund, G.; Measures, R. The mechanical load transfer into a distributed optical fibre sensor due to a linear strain gradient Embedded and surface bonded case. Smart Mater. Struct. 1999, 8, 175–181. [Google Scholar] [CrossRef]
- Li, J.L.; Zhou, Z.; Ou, J.P. Interface transferring mechanism and error modification of embedded FBG strain sensor based on creep—Part I: Linear viscoelasticity. In Proceedings of the Smart Structures and Materials 2005 Conference, San Diego, CA, USA, 7–10 March 2005. [Google Scholar]
- Wu, Z.X.; Wu, F. Analysis of Fiber Bragg Grating Sensing Characteristics. In Fiber Bragg Grating Sensing Principle and Application, 1st ed.; Xiong, S.H., Ed.; Nation Defense Industry Press: Beijing, China, 2011; pp. 31–49. [Google Scholar]
- Huang, X.H.; Feng, X.T. The relation between operator substitution of viscoelastic body and elasto-viscoelastic correspondence principle with constant Poisson ratio. Chin. J. Rock Mech. Eng. 2006, 25, 2509–2514. [Google Scholar]
- Liang, M.F.; Chen, N.N.; Fang, X.Q.; Wu, G. Strain transferring mechanism analysis of the surface-bonded FBG sensor. Appl. Opt. 2018, 57, 5837–5843. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material Parameters | Physical Symbols | Values | Units |
|---|---|---|---|
| Radius of bare fiber core | rc | 62.5 | μm |
| Radius of the cladding layer | rp | 125 | μm |
| Elastic modulus of the fiber | Ec | 72 | GPa |
| Shear modulus of the cladding layer | Gp | 400 | MPa |
| Bond length | L | 12 | mm |
| Spring length | Ls | 60 | mm |
| Bond width | D | 2 | mm |
| Thickness of the adhesive interlayer | h | 0.2 | mm |
| Shear creeps compliance | Ga1 | 5 | GPa |
| Central wavelength initial value | λB1, λB2 | 1515.694 1531.054 | nm |
| Resistance Strain Gauge 1 | FBG Sensor 1 | Resistance Strain Gauge 2 | FBG Sensor 2 | |
|---|---|---|---|---|
| Range (/kN) | 166 | 166 | 167 | 167 |
| Correlation coefficient | 0.99814 | 0.99617 | 0.99347 | 0.99553 |
| Linearity | 10.24% | 6.84% | 18.68% | 11.0% |
| Sensitivity (με/kN) | 16.44 | 16.09 | 16.73 | 18.56 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, M.; Fang, X.; Chen, N.; Xue, X.; Wu, G. A Sensing Mechanism and the Application of a Surface-Bonded FBG Dynamometry Bolt. Appl. Sci. 2022, 12, 3225. https://doi.org/10.3390/app12073225
Liang M, Fang X, Chen N, Xue X, Wu G. A Sensing Mechanism and the Application of a Surface-Bonded FBG Dynamometry Bolt. Applied Sciences. 2022; 12(7):3225. https://doi.org/10.3390/app12073225
Chicago/Turabian StyleLiang, Minfu, Xinqiu Fang, Ningning Chen, Xiaomei Xue, and Gang Wu. 2022. "A Sensing Mechanism and the Application of a Surface-Bonded FBG Dynamometry Bolt" Applied Sciences 12, no. 7: 3225. https://doi.org/10.3390/app12073225
APA StyleLiang, M., Fang, X., Chen, N., Xue, X., & Wu, G. (2022). A Sensing Mechanism and the Application of a Surface-Bonded FBG Dynamometry Bolt. Applied Sciences, 12(7), 3225. https://doi.org/10.3390/app12073225