
High-Speed Spiral Bevel GEAR Dynamic Rules Considering the Impact of Web Thicknesses and Angles

 ,
,
Abstract
:1. Introduction
2. Basic Theory of Modified VFIFE Method and Dynamic Damping Model of SBG
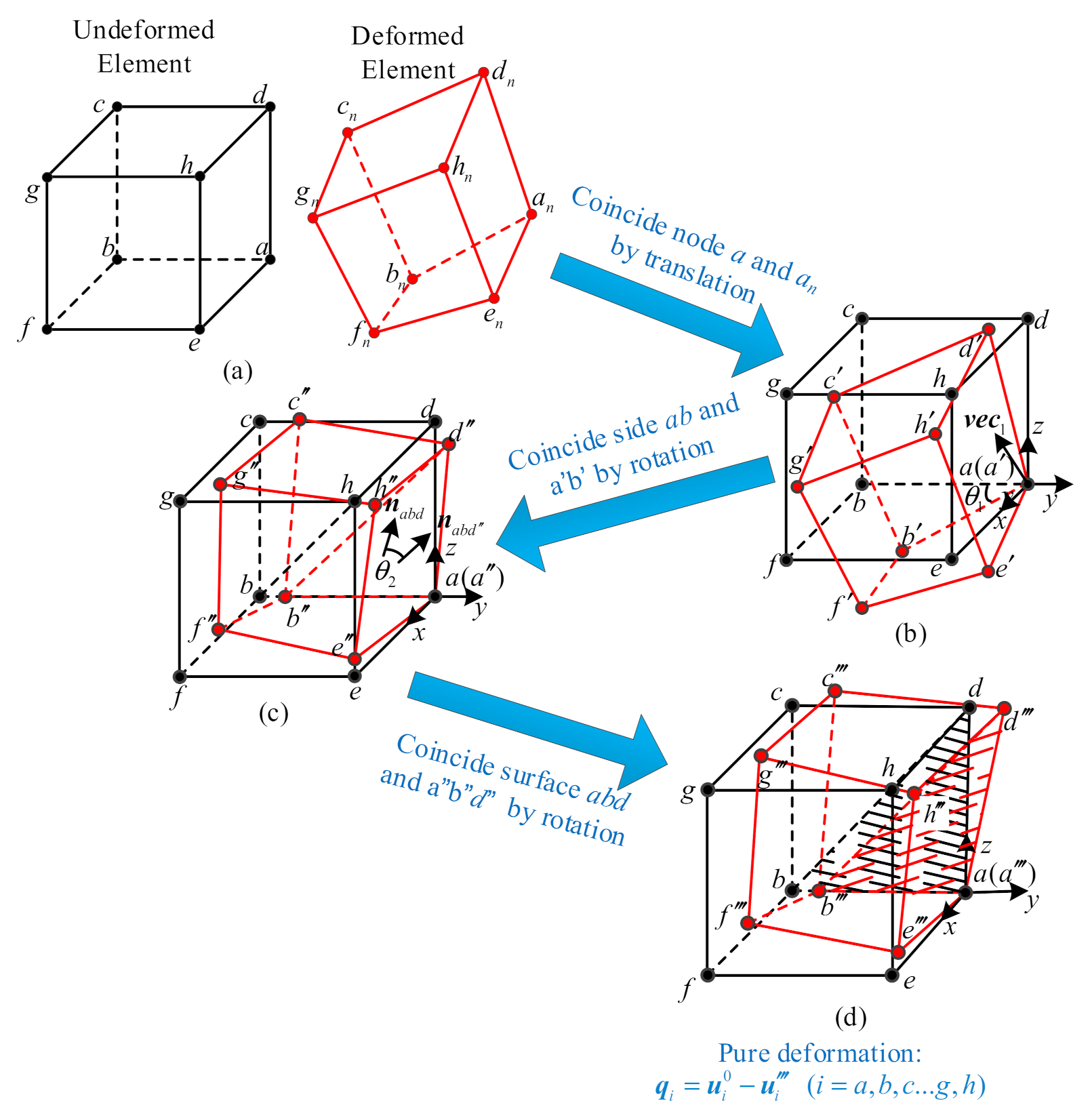
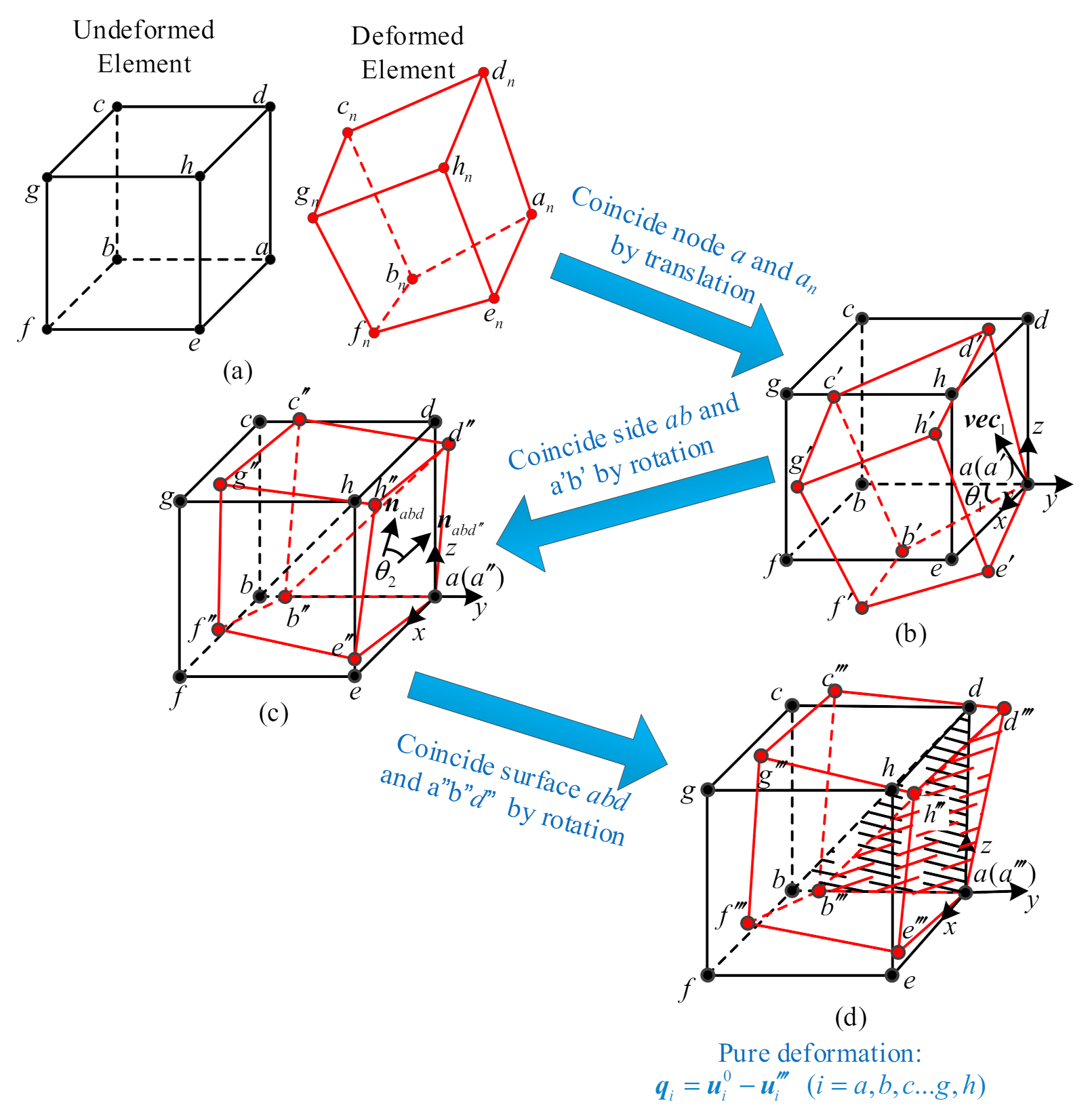
2.1. Modified VFIFE Method
2.2. Establishing of Dynamic Damping Model of Gear Dynamics
2.2.1. Contact Model
2.2.2. Relative Velocity and Damping Model
3. Basic Model of SBG
3.1. Basic Parameters and Machine-Tool Settings
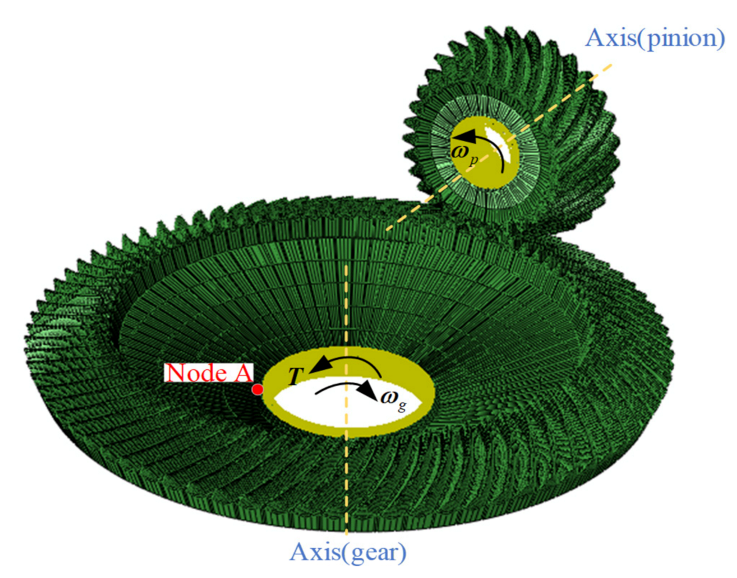
3.2. Models and Settings
4. SBG Dynamic Analysis with Different Web Thicknesses
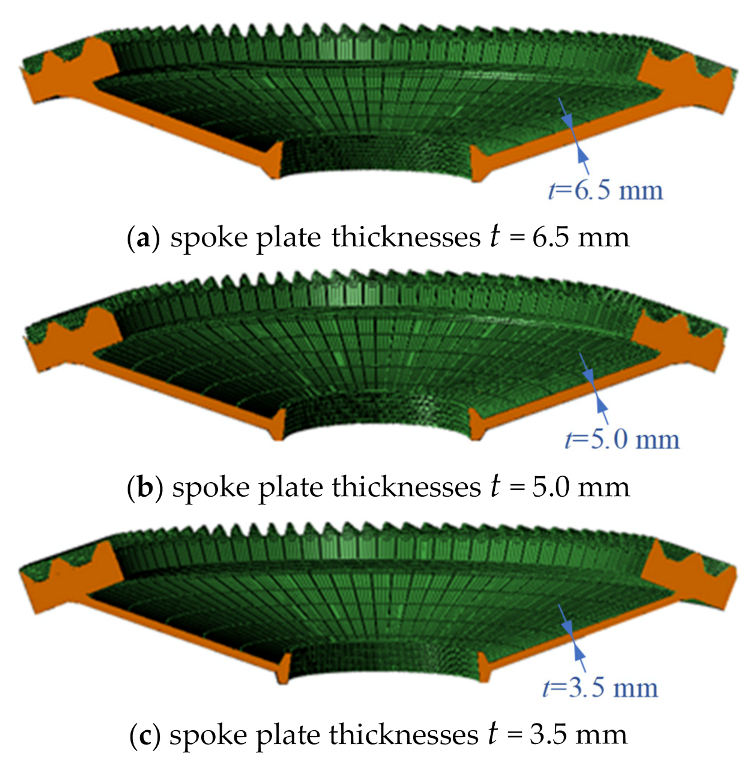
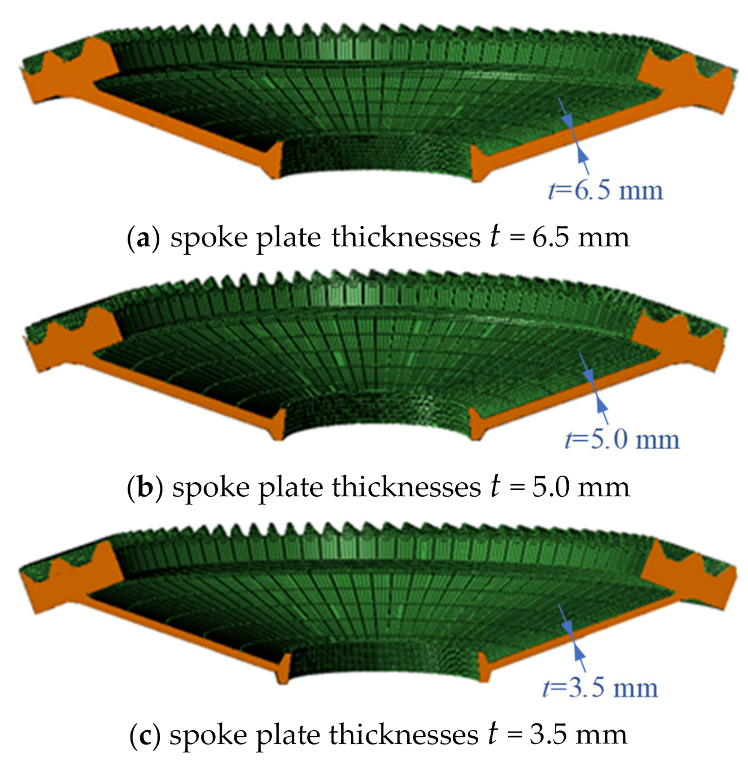
4.1. Model Establishment
4.2. Results Discussion
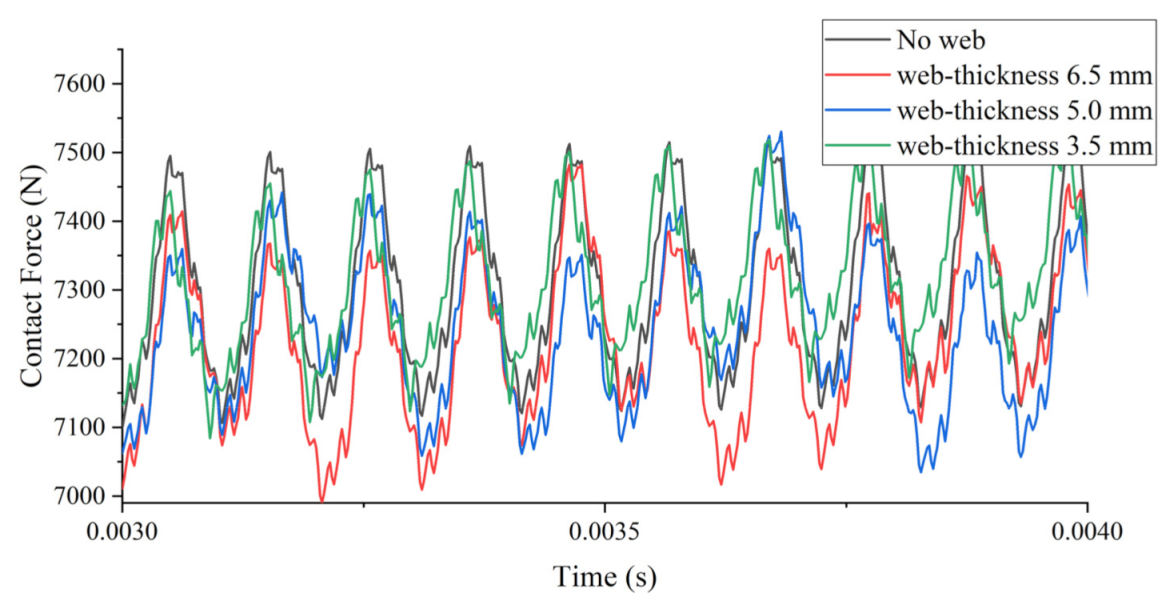
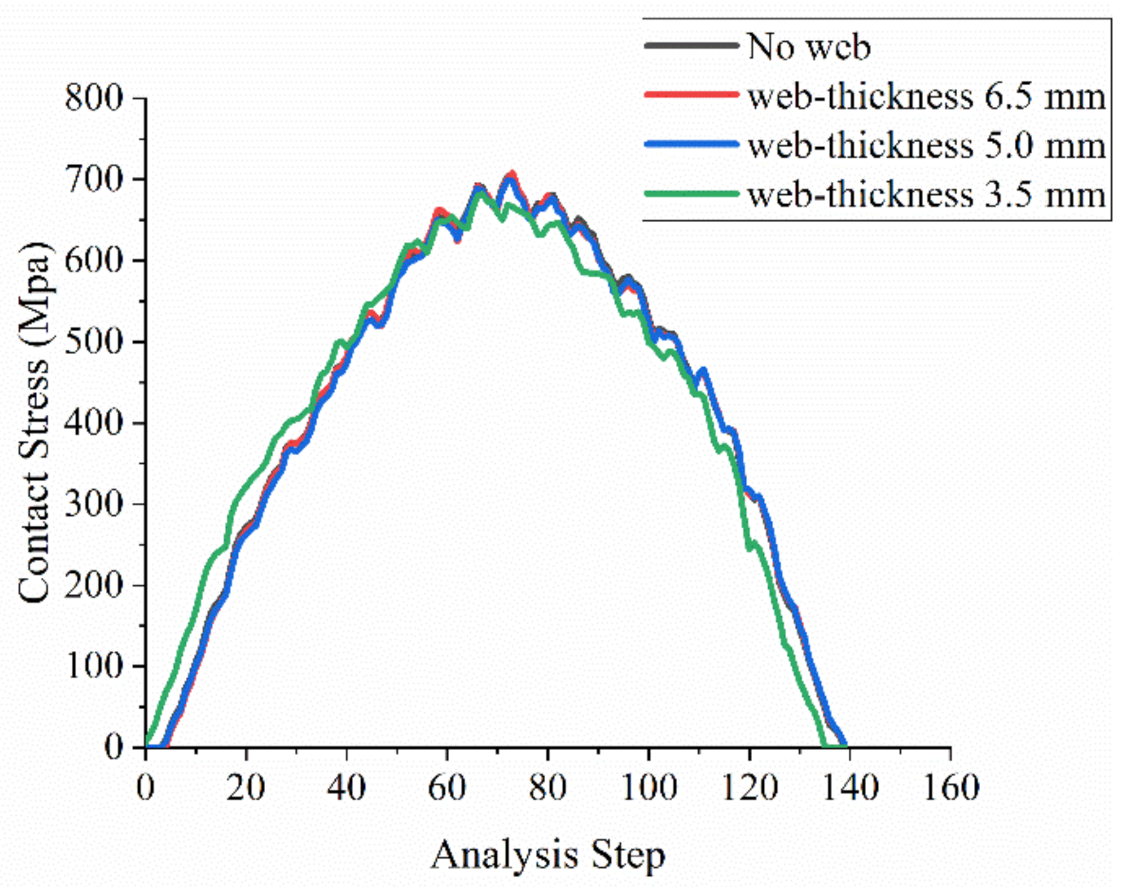
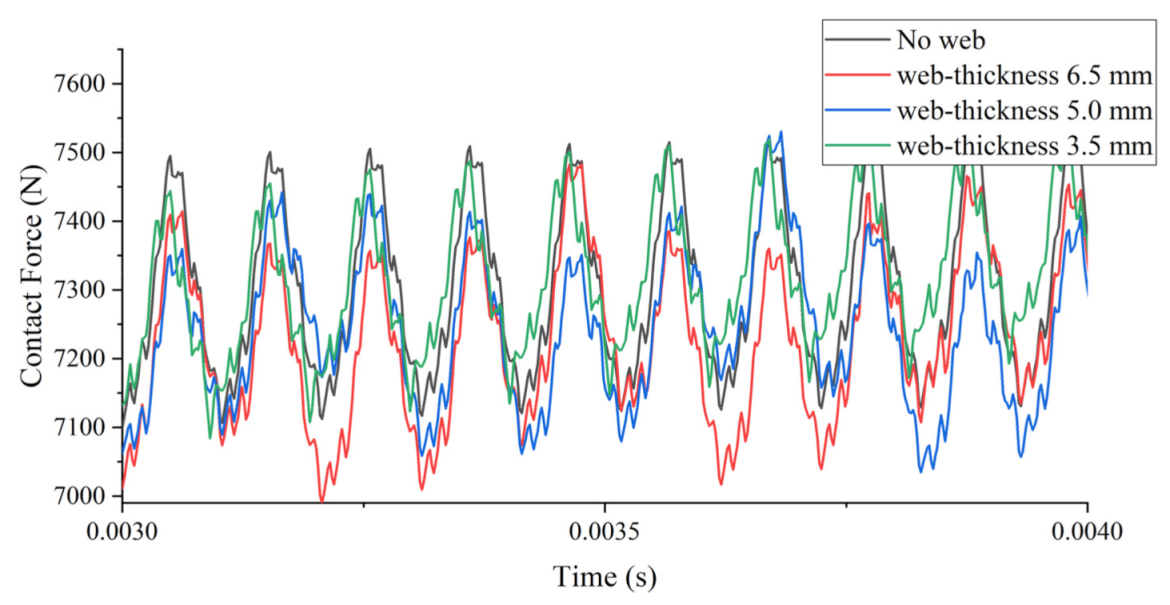
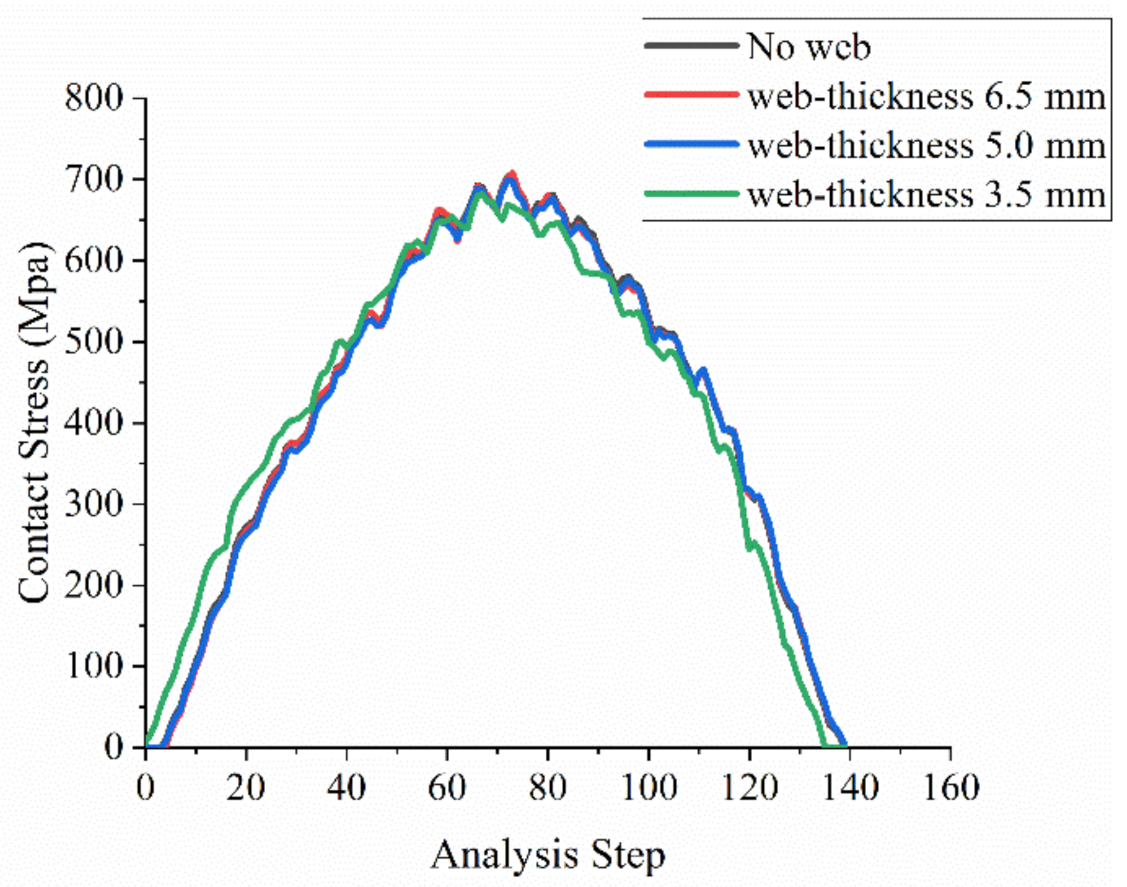
4.2.1. Contact Force and Contact Stress
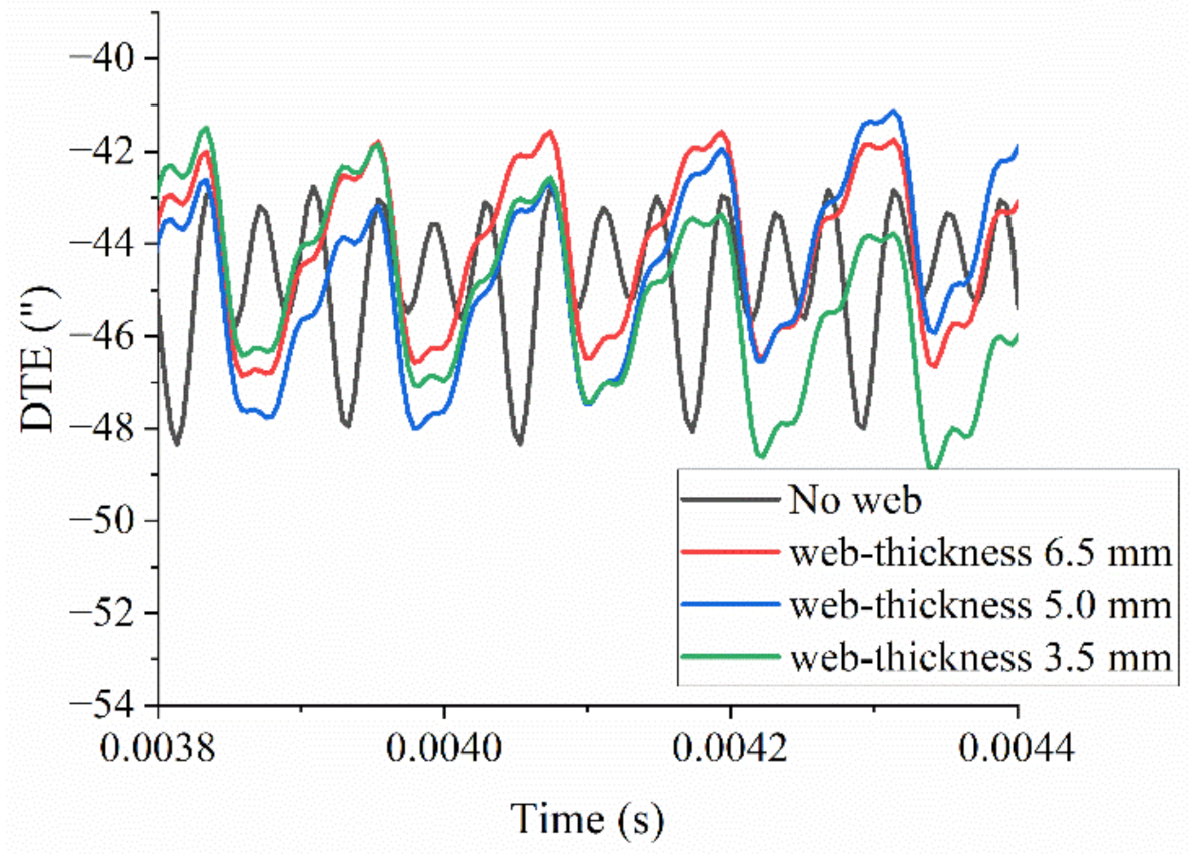
4.2.2. Dynamic Transmission Error
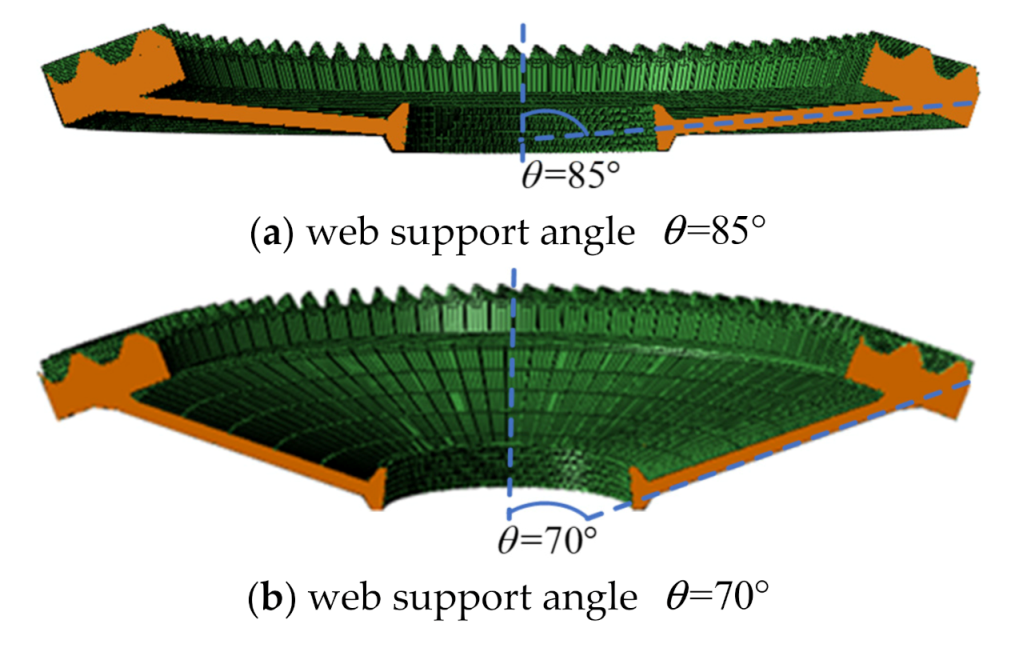
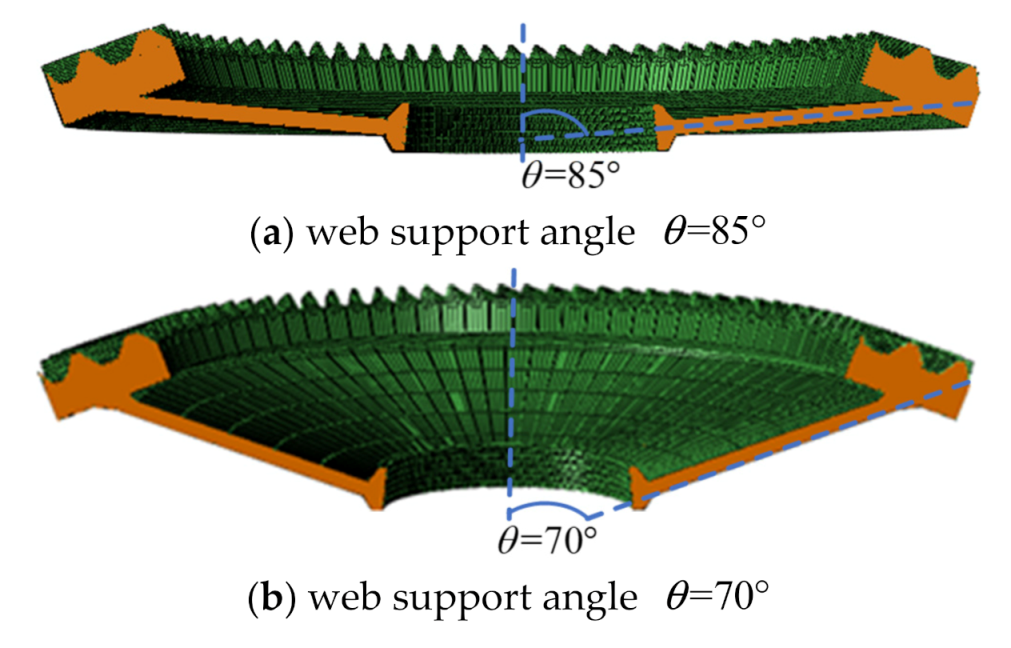
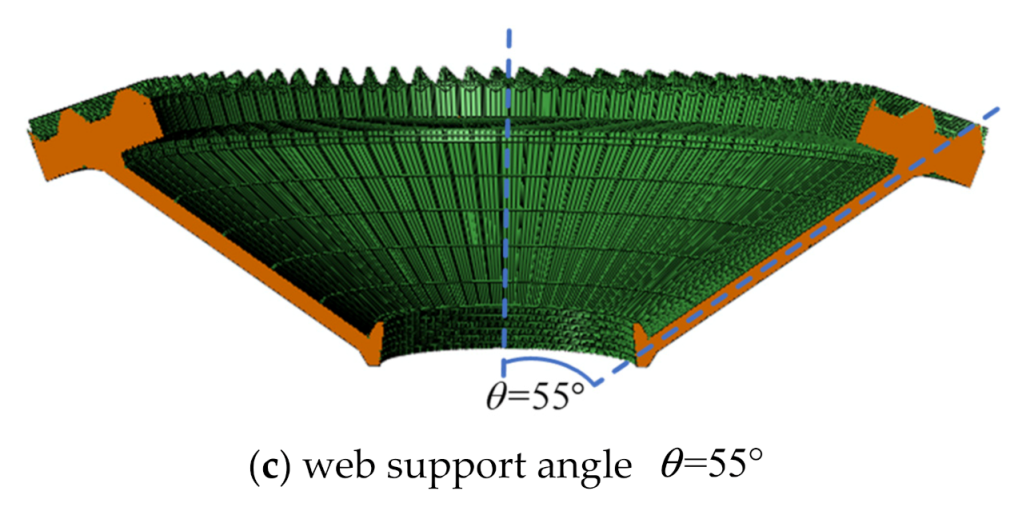
5. SBG Dynamic Analysis with Different Web Support Angles
5.1. Model Establishment
5.2. Results Discussion
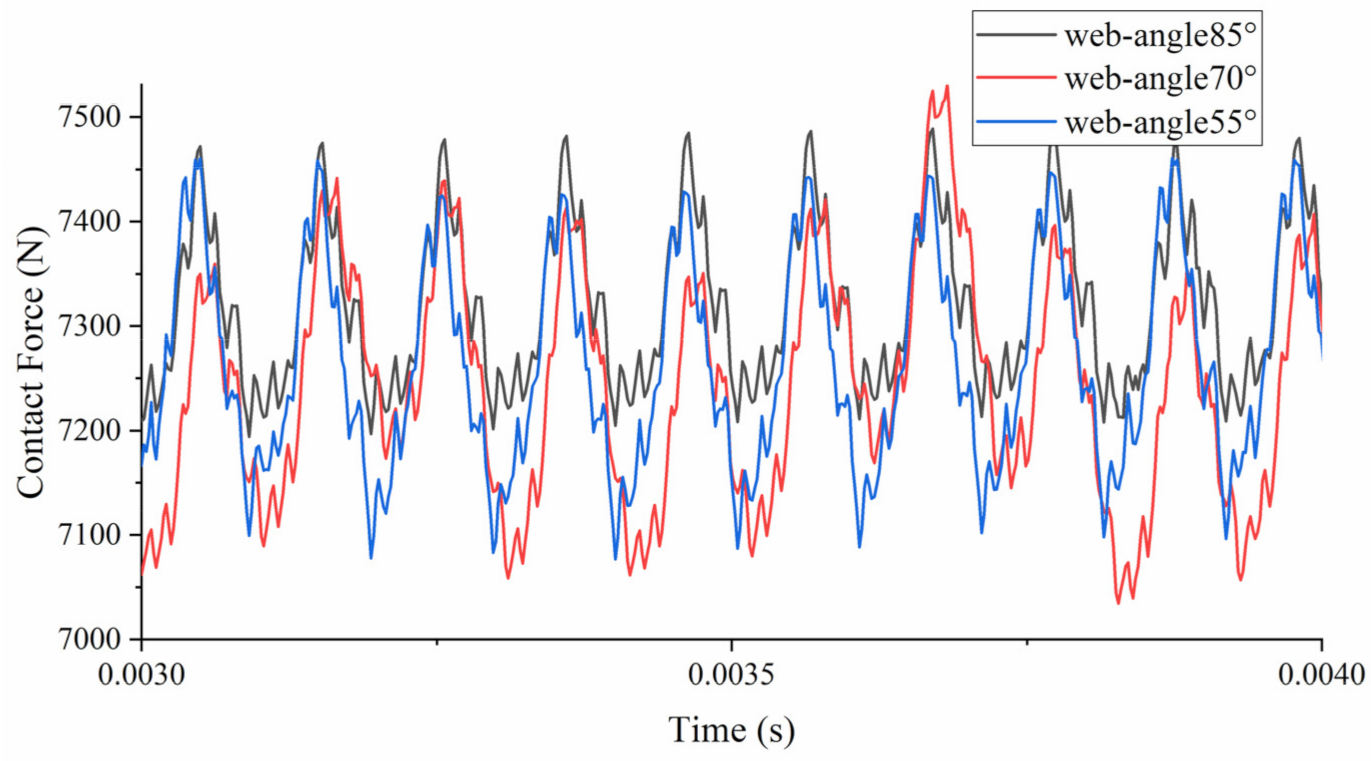
5.2.1. Contact Force and Contact Stress
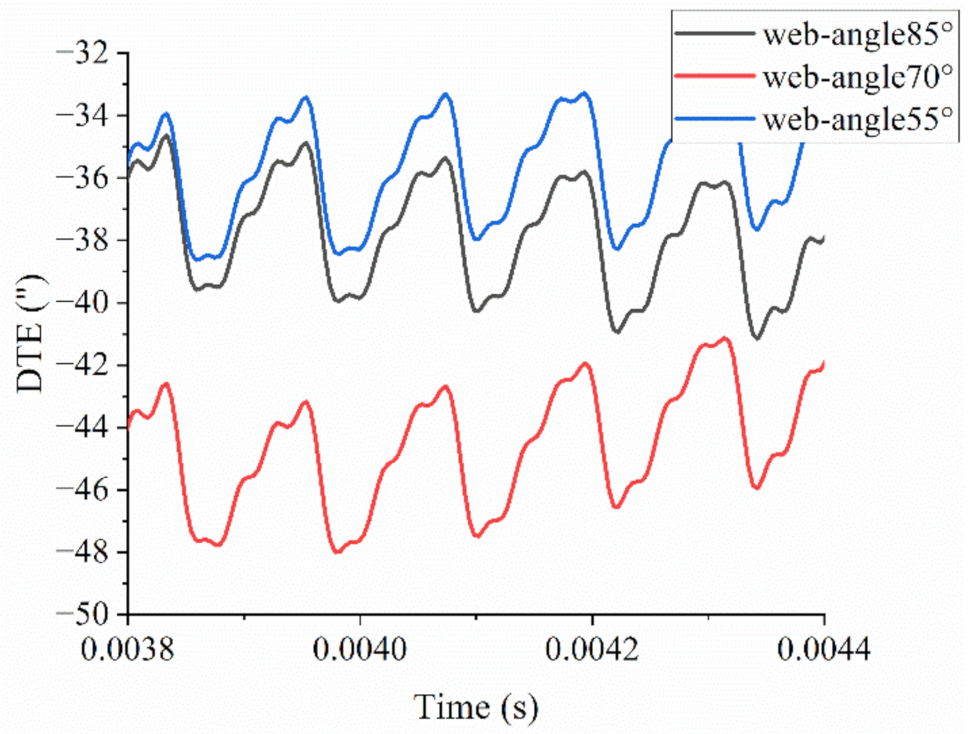
5.2.2. Dynamic Transmission Error
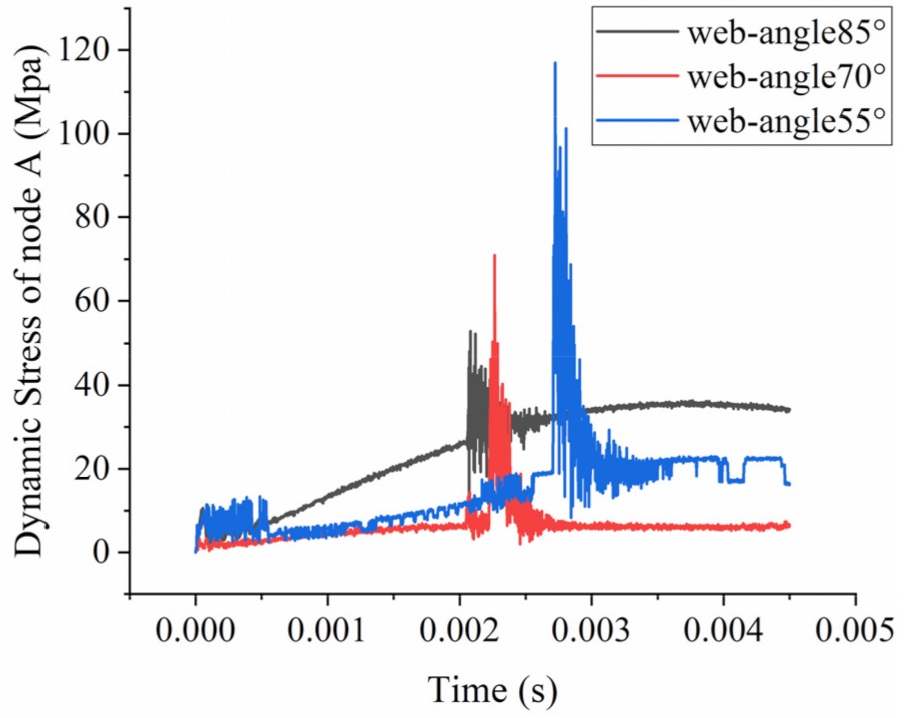
5.2.3. Dynamic Stresses
6. Conclusions
- (1)
- The proposed modified VFIFE method showed good balance in computing speed and computing accuracy. Computing time was less than 8 h for models with more than 140 thousand elements. Meshing period and rules are adequately illustrated in the results. Thus, the proposed method would be suitable for high-speed simulation.
- (2)
- The dynamic performance of spiral bevel gear models with different web thicknesses was simulated and compared, in which the results showed that web thicknesses had little influence on meshing performance but obviously affected dynamic transmission error.
- (3)
- The dynamic performance of spiral bevel gear models with different web support angles was simulated and compared, in which the results showed that support angles affected both meshing performance and dynamic characteristics more distinctly than web thicknesses.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Geng, Z.; Xiao, K.; Wang, J.; Li, J. Nonlinear Dynamic Analysis of a Rigid–Flexible Gear Transmission Considering Geometric Eccentricities. J. Comput. Nonlinear Dyn. 2020, 15, 084501. [Google Scholar] [CrossRef]
- Liu, J.; Pang, R.K.; Ding, S.Z.; Li, X.B. Vibration analysis of a planetary gear with the flexible ring and planet bearing fault. Measurement 2020, 165, 108100. [Google Scholar] [CrossRef]
- Hao, C.Y.; Feng, G.B.; Sun, H.G.; Li, H.P. Rigid-flexible coupling dynamics simulation of planetary gear transmission based on MFBD. J. Vibroeng. 2017, 19, 5668–5678. [Google Scholar] [CrossRef]
- Yavuz, S.D.; Saribay, Z.B.; Cigeroglu, E. Nonlinear dynamic analysis of a drivetrain composed of spur, helical and spiral bevel gears. Nonlinear Dyn. 2020, 100, 3145–3170. [Google Scholar] [CrossRef]
- Li, Z.W.; Wen, B.R.; Peng, Z.K.; Dong, X.J.; Qu, Y.G. Dynamic modeling and analysis of wind turbine drivetrain considering the effects of non-torque loads. Appl. Math. Model. 2020, 83, 146–168. [Google Scholar] [CrossRef]
- Liu, C.; Fang, Z.D.; Wang, F. An improved model for dynamic analysis of a double-helical gear reduction unit by hybrid user-defined elements: Experimental and numerical validation. Mech. Mach. Theory 2018, 127, 96–111. [Google Scholar] [CrossRef]
- Liu, C.; Fang, Z.D.; Liu, X.; Hu, S.Y. Multibody dynamic analysis of a gear transmission system in electric vehicle using hybrid user-defined elements. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2019, 233, 30–42. [Google Scholar] [CrossRef]
- Xu, X.Y.; Tao, Y.C.; Liao, C.R.; Dong, S.J.; Chen, R.X. Dynamic Simulation of Wind Turbine Planetary Gear Systems with Gearbox Body Flexibility. Stroj. Vestn.-J. Mech. Eng. 2016, 62, 678–684. [Google Scholar] [CrossRef]
- Shi, W.; Park, Y.; Park, H.; Ning, D.Z. Dynamic analysis of the wind turbine drivetrain considering shaft bending effect. J. Mech. Sci. Technol. 2018, 32, 3065–3072. [Google Scholar] [CrossRef]
- Cho, S.; Choi, J.; Choi, J.H.; Rhim, S. Numerical estimation of dynamic transmission error of gear by using quasi-flexible-body modeling method. J. Mech. Sci. Technol. 2015, 29, 2713–2719. [Google Scholar] [CrossRef]
- Chandrasekaran, M.; Nandakumar, P. Study of Mesh Stiffness of Spur Gear Tooth by Considering Pitting Defect under Dynamic Load Conditions. In 3rd International Conference on Advances in Mechanical Engineering; IOP Publishing: London, UK, 2020; Volume 912. [Google Scholar] [CrossRef]
- Ren, F.; Li, A.S.; Shi, G.Q.; Wu, X.L.; Wang, N. The Effects of the Planet-Gear Manufacturing Eccentric Errors on the Dynamic Properties for Herringbone Planetary Gears. Appl. Sci. 2020, 10, 1060. [Google Scholar] [CrossRef] [Green Version]
- Marafona, J.D.M.; Marque, P.M.T.; Martins, R.C.; Seabra, J.H.O. Towards constant mesh stiffness helical gears: The influence of integer overlap ratios. Mech. Mach. Theory 2019, 136, 141–161. [Google Scholar] [CrossRef]
- Hua, X.; Chen, Z.G. Effect of roller bearing elasticity on spiral bevel gear dynamics. Adv. Mech. Eng. 2020, 12, 1687814020938895. [Google Scholar] [CrossRef]
- Belingardi, G.; Cuffaro, V.; Cura, F. Multibody approach for the dynamic analysis of gears transmission for an electric vehicle. Proc. Inst. Mech. Eng. Part C J. Eng. Mech. Eng. Sci. 2018, 232, 57–65. [Google Scholar] [CrossRef] [Green Version]
- Filgueira da Silva, S.; Eckert, J.J.; Carvalho, A.C.; Mazzariol Santiciolli, F.; Silva, L.C.A.; Dedini, F.G. Multi-body Dynamics Co-simulation of Planetary Gear Train for Dynamic Meshing Force Analysis. In Multibody Mechatronic Systems. Papers from the MuSMe Conference in 2020. Mechanisms and Machine Science (MMS 94); Springer: Cham, Switzerland, 2021; pp. 159–167. [Google Scholar] [CrossRef]
- Yu, W.N.; Mechefske, C.K.; Timusk, M. The dynamic coupling behaviour of a cylindrical geared rotor system subjected to gear eccentricities. Mech. Mach. Theory 2017, 107, 105–122. [Google Scholar] [CrossRef]
- Xiuquan, S.; Tie, W.; Ruiliang, Z.; Fengshou, G.; Ball, A.D. Modelling of Spur Gear Dynamic Behaviours with Tooth Surface Wear. In Advances in Asset Management and Condition Monitoring. COMADEM 2019. Smart Innovation, Systems and Technologies (SIST 166); Springer: Cham, Switzerland, 2020; pp. 1437–1449. [Google Scholar] [CrossRef]
- Kim, J.G.; Gang, G.A.; Cho, S.J.; Lee, G.H.; Park, Y.J. Dynamic Stiffness Effect of Mechanical Components on Gear Mesh Misalignment. Appl. Sci. 2018, 8, 844. [Google Scholar] [CrossRef] [Green Version]
- Li, S.T. Effects of centrifugal load on tooth contact stresses and bending stresses of thin-rimmed spur gears with inclined webs. Mech. Mach. Theory 2013, 59, 34–47. [Google Scholar] [CrossRef]
- Li, Z.; Wang, H.; Zhu, R.; Ye, W. Solutions of active vibration suppression associated with web structures on face gear drives. JVE J. 2017, 14, 146–150. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.M.Q.; Wang, H.; Zhu, R.P. Effect predictions of web active control on dynamic behaviors of face gear drives. J. Low Freq. Noise Vib. Act. Control 2019, 38, 753–764. [Google Scholar] [CrossRef]
- Hou, L.G.; Lei, Y.L.; Fu, Y.; Hu, J.L. Effects of lightweight gear blank on noise, vibration and harshness for electric drive system in electric vehicles. Proc. Inst. Mech. Eng. Part K J. Multi-Body Dyn. 2020, 234, 447–464. [Google Scholar] [CrossRef]
- Guilbert, B.; Velex, P.; Cutuli, P. Quasi-static and dynamic analyses of thin-webbed high-speed gears: Centrifugal effect influence. Proc. Inst. Mech. Eng. Part C J. Eng. Mech. Eng. Sci. 2019, 233, 7282–7291. [Google Scholar] [CrossRef]
- Guilbert, B.; Velex, P.; Dureisseix, D.; Cutuli, P. Modular hybrid models to simulate the static and dynamic behaviour of high-speed thin-rimmed gears. J. Sound Vib. 2019, 438, 353–380. [Google Scholar] [CrossRef]
- Hou, X.Y.; Zhang, Y.Z.; Zhang, H.; Zhang, J.; Li, Z.M.Q.; Zhu, R.P. A modified damping model of vector form intrinsic finite element method for high-speed spiral bevel gear dynamic characteristics analysis. J. Strain Anal. Eng. Des. 2022, 57, 144–154. [Google Scholar] [CrossRef]
- Duan, Y.F.; Wang, S.M.; Yau, J.D. Vector Form Intrinsic Finite Element Method for Analysis of Train-Bridge Interaction Problems Considering The Coach-Coupler Effect. Int. J. Struct. Stab. Dyn. 2019, 19, 29. [Google Scholar] [CrossRef]
- Li, X.M.; Guo, X.L.; Guo, H.Y. Vector form intrinsic finite element method for nonlinear analysis of three-dimensional marine risers. Ocean Eng. 2018, 161, 257–267. [Google Scholar] [CrossRef]
- Duan, Y.F.; Tao, J.J.; Zhang, H.M.; Wang, S.M.; Yun, C.B. Real-time hybrid simulation based on vector form intrinsic finite element and field programmable gate array. Struct. Control Health Monit. 2019, 26, 21. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.L.; Yang, R.C.; Zhao, Y. Application of vector form intrinsic finite element on integrated simulation of wind turbine. Struct. Des. Tall Spec. Build. 2017, 26, 11. [Google Scholar] [CrossRef]
- Hou, X.; Fang, Z.; Zhang, X. Static contact analysis of spiral bevel gear based on modified VFIFE (vector form intrinsic finite element) method. Appl. Math. Model. 2018, 60, 192–207. [Google Scholar] [CrossRef]
- Hallquist, J.O.; Goudreau, G.L.; Benson, D.J. Sliding interfaces with contact-impact in large-scale Lagrangian computations. Comput. Methods Appl. Mech. Eng. 1985, 51, 107–137. [Google Scholar] [CrossRef]
- Sheng Ping, W.; Nakamachi, E. The inside-outside contact search algorithm for finite element analysis. Int. J. Numer. Methods Eng. 1997, 40, 3665–3685. [Google Scholar] [CrossRef]
- Litvin, F.L.; Fuentes, A. Gear Geometry and Applied Theory; Cambridge University Press: Cambridge, UK, 2004; p. 493. [Google Scholar]
- Jinzhan, S.; Zongde, F.; Xiangwei, C. Design and analysis of spiral bevel gears with seventh-order function of transmission error. Chin. J. Aeronaut. 2013, 26, 1310–1316. [Google Scholar]
- Litvin, F.L.; Fuentes, A.; Hayasaka, K. Design, manufacture, stress analysis, and experimental tests of low-noise high endurance spiral bevel gears. Mech. Mach. Theory 2006, 41, 83–118. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Pinion | Gear |
|---|---|---|
| Tooth number | 27 | 79 |
| Modulus (mm) | 3.15 | 3.15 |
| Pressure angle (°) | 20 | 20 |
| Mean spiral angle (°) | 30 | 30 |
| Face width (mm) | 30 | 30 |
| Shaft angle (°) | 90 | 90 |
| Mean cone distance (mm) | 116.49 | 116.49 |
| Hand of spiral | Right | Left |
| Pitch angle (°) | 18.87 | 71.13 |
| Root angle (°) | 17.9 | 72.1 |
| Addendum (mm) | 3.34 | 1.32 |
| Dedendum (mm) | 1.91 | 3.94 |
| Items | Pinion | Gear | |
|---|---|---|---|
| Concave | Convex | - | |
| Profile angle (°) | 20 | 20 | 20 |
| Point radius (mm) | 94.01 | 96.18 | 94.26 |
| Cutter diameter (mm) | 152.4 | 190.5 | |
| Cradle angle (°) | −50.44 | −48.81 | 50.16 |
| Radial distance (mm) | 104.53 | 108.77 | 107.42 |
| Blank offset (mm) | 1.41 | −0.62 | 0 |
| Machine center to back (mm) | −1.16 | −0.13 | 0 |
| Sliding base (mm) | 0.41 | 0.10 | −0.50 |
| Machine root angle (°) | 17.90 | 69.44 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hou, X.; Qiu, L.; Zhang, Y.; Li, Z.; Zhu, R.; Lyu, S.-K. High-Speed Spiral Bevel GEAR Dynamic Rules Considering the Impact of Web Thicknesses and Angles. Appl. Sci. 2022, 12, 3084. https://doi.org/10.3390/app12063084
Hou X, Qiu L, Zhang Y, Li Z, Zhu R, Lyu S-K. High-Speed Spiral Bevel GEAR Dynamic Rules Considering the Impact of Web Thicknesses and Angles. Applied Sciences. 2022; 12(6):3084. https://doi.org/10.3390/app12063084
Chicago/Turabian StyleHou, Xiangying, Linyue Qiu, Yuzhe Zhang, Zhengminqing Li, Rupeng Zhu, and Sung-Ki Lyu. 2022. "High-Speed Spiral Bevel GEAR Dynamic Rules Considering the Impact of Web Thicknesses and Angles" Applied Sciences 12, no. 6: 3084. https://doi.org/10.3390/app12063084
APA StyleHou, X., Qiu, L., Zhang, Y., Li, Z., Zhu, R., & Lyu, S.-K. (2022). High-Speed Spiral Bevel GEAR Dynamic Rules Considering the Impact of Web Thicknesses and Angles. Applied Sciences, 12(6), 3084. https://doi.org/10.3390/app12063084