
Location Optimisation in the Process of Designing Infrastructure of Point Pollutant Emitters to Meet Specific Environmental Protection Standards



Abstract
1. Introduction
Brief Introduction to Pollutant Dispersion
- molecular nitrogen in excess of ;
- oxygen , slightly less than ;
- argon , ;
- neon , helium , krypton , xenon ;
- hydrogen , ozone in trace quantities.
- PM 10—particulate matter fractions of aerodynamic diameter in the range: (2.5 m; 10 m);
- PM 2.5—particulate matter fractions up to 2.5 m in diameter;
- TSP—total suspended particulate matter.
- Natural sources, related to the functioning of nature;
- Man-made sources, related to human activity.
- Point sources—the release of pollutants into the atmosphere takes place in a volume much smaller than the considered pollutant transport distance (chimneys [11], ventilation shafts, households);
- Linear sources—the release of pollutants into the atmosphere takes place along a straight line or curve of a length comparable to the considered pollutant transport distance (roads [12], motorways, open sewage channels). For the purposes of calculation, such an emission may be treated as a set of point sources;
- Surface sources—the release of pollutants into the atmosphere takes place from a plane, and the dimensions of the plane are comparable to the considered pollutant transport distance (re-emission of pollutants from waters [13], sedimentation tanks, waste dumps);
- Volumetric sources—the release of pollutants into the atmosphere takes place in a volume of dimensions comparable to the considered transport distance (e.g., volcanic emission [14] including emission from lava and ash clouds).
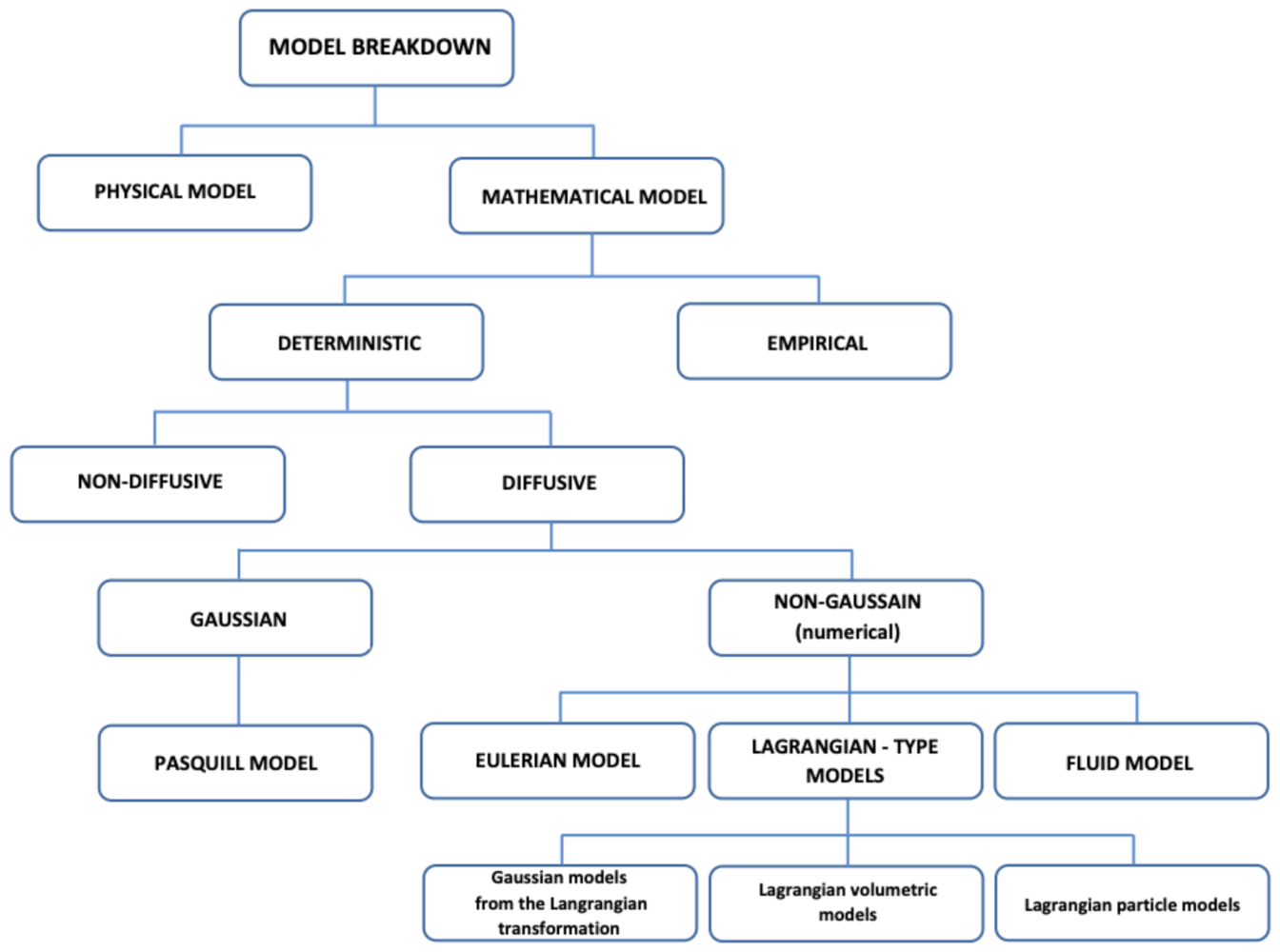
2. Pollutant Dispersion Models
- Physical models—developed in laboratory conditions, where the whole process is carried out on the basis of simulation, just like in the real atmosphere. They are the basis for creating mathematical models;
- Mathematical models—describe chemical processes that take place in the atmosphere using numerical methods—analytically. These are often referred to as deterministic models in which description of phenomena taking place in the atmosphere is conducted using mathematical equations.
2.1. Gaussian-Type Models—Old Generation Plumes
- The description of turbulent diffusion, i.e., determination of standard deviations of the distribution of pollutant concentrations in the plume ( and );
- Determining the effective height of the emitter ;
- Determining the average wind speed in the layer of dispersion of pollutants .
2.2. New Generation Models with the Gaussian Module
- Surface heat flux ;
- Surface momentum flux ;
- Thickness of the atmosphere boundary layer .
- Frictional speed ;
- Monin—Obukhov length scale L;
- Potential temperature scale ;
- Convective speed scale .
2.3. Gaussian-Type Models of Segmented Plumes
2.4. Gaussian-Type Model—Pasquill Formula
- C—concentration of pollution;
- t—time;
- u, v, w—wind speed vector components;
- x, y, z—coordinates of the location of a point in space;
- , , —components of the atmosphere turbulence diffusion coefficient;
- —term describing losses and sources of pollution in the atmosphere.
3. Optimisation
- Deterministic methods [32], which include the golden-section search, the Fibonacci search technique and square interpolation;
- —expected value;
- —linear function,;
- a, b—interval boundaries.
- n—number of simulations.
4. Identification of the Research Problem
5. Implementation of the Methods and Algorithms Used
5.1. Meteorological Data
- The wind speed measured at the anemometer height;
- The average air temperature during the calculation period;
- The atmosphere equilibrium state.
5.2. Receptor Location
- The distance from the emitter (in the axis parallel to the wind direction)—x [m];
- The distance from the emitter (in the axis perpendicular to the wind direction)—y [m];
- The height for which the concentration of the substance is determined—z [m].
5.3. Aerodynamic Roughness Length
5.4. Technical Parameters of the Emitter
- c height of the emitter calculated from ground level—h [m];
- Internal diameter of the emitter outlet—d [m];
- Speed of the substance at the emitter outlet—v [m/s];
- Temperature of the substance at the emitter outlet—T [K];
- Maximum substance emission—E [mg/s].
5.5. Implementation of the Solution, the Posed Optimisation Problem
6. Exemplary Run Results of the Optimisation System
7. Summary and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Boubel, R.W.; Vallero, D.; Fox, D.L.; Turner, B.; Stern, A.C. Fundamentals of Air Pollution; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Mannucci, P.M.; Franchini, M. Health effects of ambient air pollution in developing countries. Int. J. Environ. Res. Public Health 2017, 14, 1048. [Google Scholar] [CrossRef] [PubMed]
- Jørgensen, S.E. Air Pollution: Technology. In Managing Air Quality and Energy Systems; CRC Press: Boca Raton, FL, USA, 2020; Chapter Air Pollution: Technology; p. 22. [Google Scholar]
- Halkos, G.; Tsilika, K. Understanding transboundary air pollution network: Emissions, depositions and spatio-temporal distribution of pollution in European region. Resour. Conserv. Recycl. 2019, 145, 113–123. [Google Scholar] [CrossRef]
- Giovannini, L.; Ferrero, E.; Karl, T.; Rotach, M.W.; Staquet, C.; Castelli, S.T.; Zardi, D. Atmospheric pollutant dispersion over complex terrain: Challenges and needs for improving air quality measurements and modeling. Atmosphere 2020, 11, 646. [Google Scholar] [CrossRef]
- Yousefian, F.; Faridi, S.; Azimi, F.; Aghaei, M.; Shamsipour, M.; Yaghmaeian, K.; Hassanvand, M.S. Temporal variations of ambient air pollutants and meteorological influences on their concentrations in Tehran during 2012–2017. Sci. Rep. 2020, 10, 292. [Google Scholar] [CrossRef] [PubMed]
- Yuan, G.; Yang, W. Evaluating China’s air pollution control policy with extended AQI Indicator system: Example of the Beijing-Tianjin-Hebei region. Sustainability 2019, 11, 939. [Google Scholar] [CrossRef]
- Chen, C.W.; Tseng, Y.S.; Mukundan, A.; Wang, H.C. Air Pollution: Sensitive Detection of PM2.5 and PM10 Concentration Using Hyperspectral Imaging. Appl. Sci. 2021, 11, 4543. [Google Scholar] [CrossRef]
- Juda, T.; Chróściel, S. Atmospheric Air Protection [In Polish: Ochrona Powietrza Atmosferycznego]; WNT: Warsaw, Poland, 1976. [Google Scholar]
- Pospisil, J.; Jicha, M. Influence of vehicle-induced turbulence on pollutant dispersion in street canyon and adjacent urban area. Int. J. Environ. Pollut. 2017, 62, 89–101. [Google Scholar] [CrossRef]
- Clarisse, L.; Damme, M.V.; Clerbaux, C.; Coheur, P.F. Tracking down global NH3 point sources with wind-adjusted superresolution. Atmos. Meas. Tech. 2019, 12, 5457–5473. [Google Scholar] [CrossRef]
- Skrobacki, Z.; Łagowski, P.; Bąkowski, A. Distribution of NOx concentration from linear emission—A case study for the street surroundings in the suburbs of a city. In Proceedings of the 2018 XI International Science-Technical Conference Automotive Safety, Casta-Papiernicka, Slovakia, 18–20 April 2018; pp. 1–7. [Google Scholar]
- Nizzetto, L.; Lohmann, R.; Gioia, R.; Dachs, J.; Jones, K.C. Atlantic Ocean surface waters buffer declining atmospheric concentrations of persistent organic pollutants. Environ. Sci. Technol. 2010, 44, 6978–6984. [Google Scholar] [CrossRef]
- Trejos, E.M.; Silva, L.F.; Hower, J.C.; Flores, E.M.; González, C.M.; Pachón, J.E.; Aristizábal, B.H. Volcanic emissions and atmospheric pollution: A study of nanoparticles. Geosci. Front. 2021, 12, 746–755. [Google Scholar] [CrossRef]
- Wang, L.K.; Pereira, N.C.; Hung, Y.T. Advanced Air and Noise Pollution Control; Springer: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Kumar, P.; Druckman, A.; Gallagher, J.; Gatersleben, B.; Allison, S.; Eisenman, T.S.; Hoang, U.; Hama, S.; Tiwari, A.; Sharma, A.; et al. The nexus between air pollution, green infrastructure and human health. Environ. Int. 2019, 133, 105181. [Google Scholar] [CrossRef]
- Nikolaeva, Z.; Ivanova, D. Modelling of some pollutants in the air. J. Environ. Prot. Ecol. 2020, 21, 2013–2019. [Google Scholar]
- Essa, K.S.; Etman, S.M.; El-Otaify, M.S. Relation between the Actual and Estimated Maximum Ground Level Concentration of Air Pollutant and Its Downwind Locations. Open J. Air Pollut. 2020, 9, 27–35. [Google Scholar] [CrossRef]
- Kim, G.; Lee, M.I.; Lee, S.; Choi, S.D.; Kim, S.J.; Song, C.K. Numerical Modeling for the Accidental Dispersion of Hazardous Air Pollutants in the Urban Metropolitan Area. Atmosphere 2020, 11, 477. [Google Scholar] [CrossRef]
- Turos, Y.I.; Petrosian, A.A.; Davidenko, A.N. Assessment of social losses of pollution’s health caused by man-made pollution of atmospheric air with emissions of particulate matters (PM10). Medychni Perspekt. 2017, 22, 97–102. [Google Scholar] [CrossRef][Green Version]
- Mandurino, C.; Vestrucci, P. Using meteorological data to model pollutant dispersion in the atmosphere. Environ. Model. Softw. 2009, 24, 270–278. [Google Scholar] [CrossRef]
- Turner, D.B. Workbook of Atmospheric Dispersion Estimates: An Introduction to Dispersion Modeling; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Xie, X.; Semanjski, I.; Gautama, S.; Tsiligianni, E.; Deligiannis, N.; Rajan, R.T.; Pasveer, F.; Philips, W. A review of urban air pollution monitoring and exposure assessment methods. ISPRS Int. J. Geo-Inf. 2017, 6, 389. [Google Scholar] [CrossRef]
- Deja, M.; Herz, M. The use of Selected Global Optimization Algorithms in Searching for the Optimal Location of Point Pollutant Emitters in Terms of Meeting Environmental Protection Requirements [in Polish: Zastosowanie Wybranych Algorytmów Optymalizacji Globalnej do Poszukiwania Optymalnej Lokalizacji Punktowych Emiterów Zanieczyszczeń Pod Kątem Spełnienia Wymagań Ochrony środowiska]. Master’s Thesis, Opole University of Technology, Opole, Poland, 2017. [Google Scholar]
- Pasquill, F. Atmospheric dispersion modeling. J. Air Pollut. Control. Assoc. 1979, 29, 117–119. [Google Scholar] [CrossRef]
- Regulation of the Minister of Environment of the Republic of Poland “On Reference Values for Certain Substances in the Air” (Dz.U. 2003 No 1 Item 12). (In Polish). Available online: http://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=wdu20030010012 (accessed on 2 February 2022).
- Vafa-Arani, H.; Jahani, S.; Dashti, H.; Heydari, J.; Moazen, S. A system dynamics modeling for urban air pollution: A case study of Tehran, Iran. Transp. Res. Part D Transp. Environ. 2014, 31, 21–36. [Google Scholar] [CrossRef]
- Cinotti, S.; Gianfelici, F.; Giovannini, I.; Levy, A.; Tirabassi, T. Comparison of operational atmospheric pollutant diffusion models in actual situations. WIT Trans. Ecol. Environ. 1997, 21, 423–432. [Google Scholar] [CrossRef]
- Markiewicz, M.T. Basics of Pollutants Dispersion Modeling in the Atmospheric Air [In Polish: Podstawy Modelowania Rozprzestrzeniania Się Zanieczyszczeń w Powietrzu Atmosferycznym]. Oficyna Wydawnicza Politechniki Warszawskiej: Warszawa, Poland, 2004. [Google Scholar]
- Lange, K. Optimization; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013; Volume 95. [Google Scholar]
- Masłowski, D.; Dendera-Gruszka, M.; Kulińska, E.; Rut, J. Decision-Making in Planning International Freight Transport. 2020. Available online: https://ibimapublishing.com/articles/JSCCRM/2020/981734/981734-1.pdf (accessed on 3 March 2022).
- Lin, M.H.; Tsai, J.F.; Yu, C.S. A review of deterministic optimization methods in engineering and management. Math. Probl. Eng. 2012, 2012, 756023. [Google Scholar] [CrossRef]
- Karsak, E.E.; Dursun, M. Taxonomy and review of non-deterministic analytical methods for supplier selection. Int. J. Comput. Integr. Manuf. 2016, 29, 263–286. [Google Scholar] [CrossRef]
- Koch, K.R. Monte carlo methods. In Mathematische Geodäsie/Mathematical Geodesy; Springer: Berlin/Heidelberg, Germany, 2020; pp. 445–475. [Google Scholar]
- Zhou, E.; Chen, X. Sequential monte carlo simulated annealing. J. Glob. Optim. 2013, 55, 101–124. [Google Scholar] [CrossRef]
- McCall, J. Genetic algorithms for modelling and optimisation. J. Comput. Appl. Math. 2005, 184, 205–222. [Google Scholar] [CrossRef]
- Hlynka, M. MCMC and the Fibonacci distribution. Commun. -Stat.-Simul. Comput. 2017, 46, 3375–3382. [Google Scholar] [CrossRef]
- Ljungberg, M.; Strand, S.E.; King, M.A. Monte Carlo Calculations in Nuclear Medicine: Applications in Diagnostic Imaging; CRC Press: Boca Raton, FL, USA, 2012. [Google Scholar]
- Henriksen, L.C.; Hansen, M.H.; Poulsen, N.K. A simplified dynamic inflow model and its effect on the performance of free mean wind speed estimation. Wind. Energy 2013, 16, 1213–1224. [Google Scholar] [CrossRef]
- Regulation of the Minister of Environment of the Republic of Poland of 26 January 2010 “On the Reference Values for Certain Substances in the Air” (Dz.U. 2010 No 16 Item 87). (In Polish). Available online: http://isap.sejm.gov.pl/isap.nsf/DocDetails.xsp?id=wdu20100160087 (accessed on 2 February 2022).
- Raza, S.; Avila, R.; Cervantes, J. A 3D Lagrangian particle model for the atmospheric dispersion of toxic pollutants. Int. J. Energy Res. 2002, 26, 93–104. [Google Scholar] [CrossRef]
- The Code Fragment Containing the Used Pseudorandom Number Generator. Available online: https://bit.ly/3pR3Uya (accessed on 2 February 2022).
- Bryniarski, E.; Bryniarska, A. Rough search of vague knowledge. In Thriving Rough Sets; Springer: Berlin/Heidelberg, Germany, 2017; pp. 283–309. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Atmosphere Equilibrium State ATM | Wind Speed Component Range [m/s] |
|---|---|
| Strongly unstable—1 (A) | 1–3 |
| Unstable—2 (B) | 1–5 |
| Slightly unstable—3 (C) | 1–8 |
| Neutral—4 (D) | 1–11 |
| Slightly stable—5 (E) | 1–5 |
| Stable—6 (F) | 1–4 |
| No | Type of Land Cover | Length |
|---|---|---|
| 1. | Water | 0.00008 |
| 2. | Meadows, pastures | 0.02 |
| 3. | Cropland | 0.035 |
| 4. | Orchards, bushes, spinneys | 0.4 |
| 5. | Forests | 2.0 |
| 6. | Compact rural development | 0.5 |
| 7. | City of up to 10 thousand inhabitants | 1.0 |
| 8. | City of 10 to 100 thousand inhabitants | |
| 8.1. | -low buildings | 0.5 |
| 8.2. | -average buildings | 2.0 |
| 9. | City of 100 to 500 thousand inhabitants | |
| 9.1. | -low buildings | 0.5 |
| 9.2. | -average buildings | 2.0 |
| 9.3. | -high buildings | 3.0 |
| 10. | City of more than 500 thousand inhabitants | |
| 10.1. | - low buildings | 0.5 |
| 10.2. | -average buildings | 2.0 |
| 10.3. | -high buildings | 5.0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Majer, M.; Dzierwa, P.M.; Deja, M.; Herz, M.; Podpora, M. Location Optimisation in the Process of Designing Infrastructure of Point Pollutant Emitters to Meet Specific Environmental Protection Standards. Appl. Sci. 2022, 12, 3031. https://doi.org/10.3390/app12063031
Majer M, Dzierwa PM, Deja M, Herz M, Podpora M. Location Optimisation in the Process of Designing Infrastructure of Point Pollutant Emitters to Meet Specific Environmental Protection Standards. Applied Sciences. 2022; 12(6):3031. https://doi.org/10.3390/app12063031
Chicago/Turabian StyleMajer, Marcin, Piotr M. Dzierwa, Marek Deja, Mariusz Herz, and Michal Podpora. 2022. "Location Optimisation in the Process of Designing Infrastructure of Point Pollutant Emitters to Meet Specific Environmental Protection Standards" Applied Sciences 12, no. 6: 3031. https://doi.org/10.3390/app12063031
APA StyleMajer, M., Dzierwa, P. M., Deja, M., Herz, M., & Podpora, M. (2022). Location Optimisation in the Process of Designing Infrastructure of Point Pollutant Emitters to Meet Specific Environmental Protection Standards. Applied Sciences, 12(6), 3031. https://doi.org/10.3390/app12063031