
A Relative Coordinate-Based Topology Shaping Method for UAV Swarm with Low Computational Complexity



Abstract
:1. Introduction
- From a global system perspective, a system optimization model for topology shaping of UAV swarm in 3D space is developed without relying on any external localization information, in which the topology shaping and global energy consumption minimization are considered.
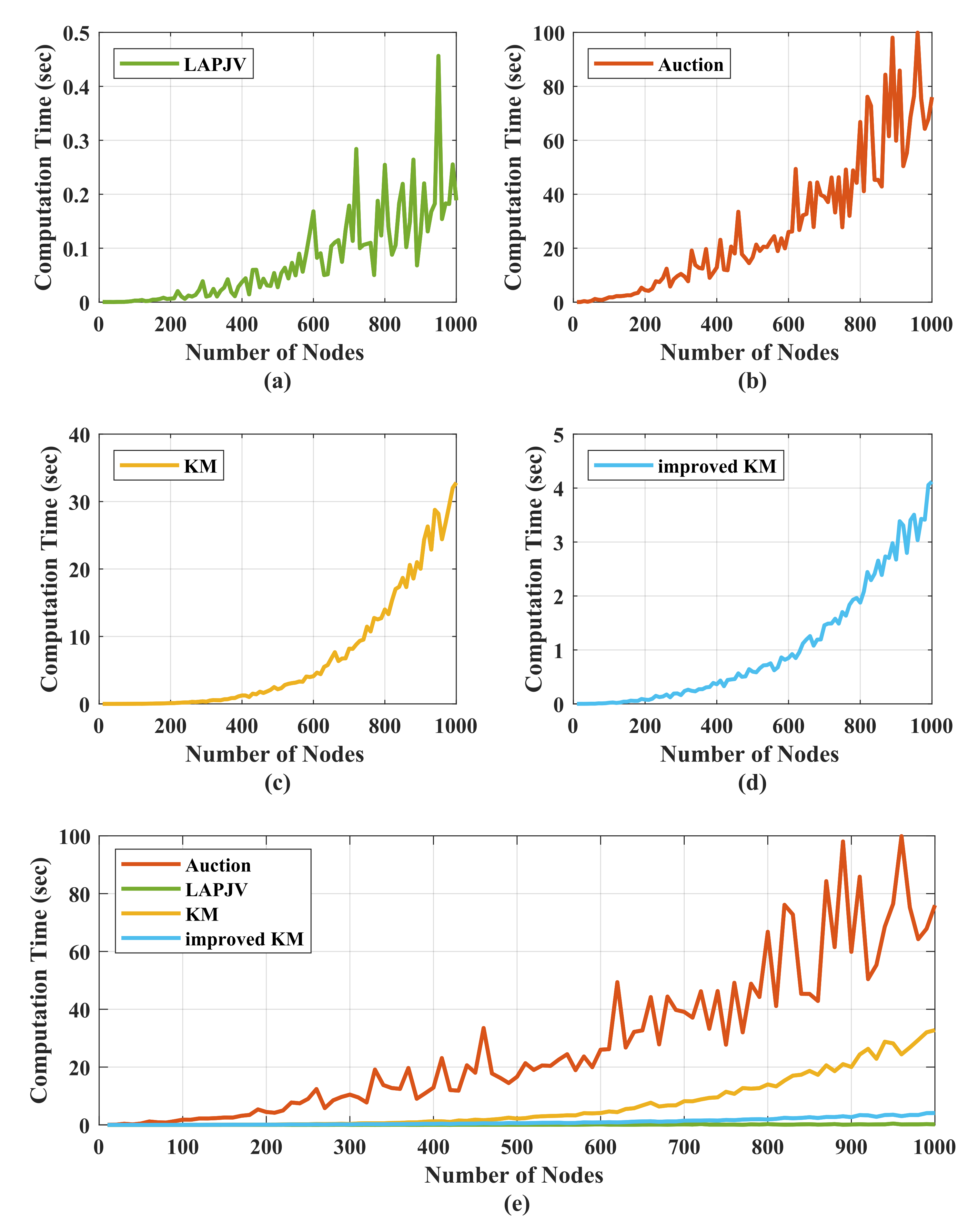
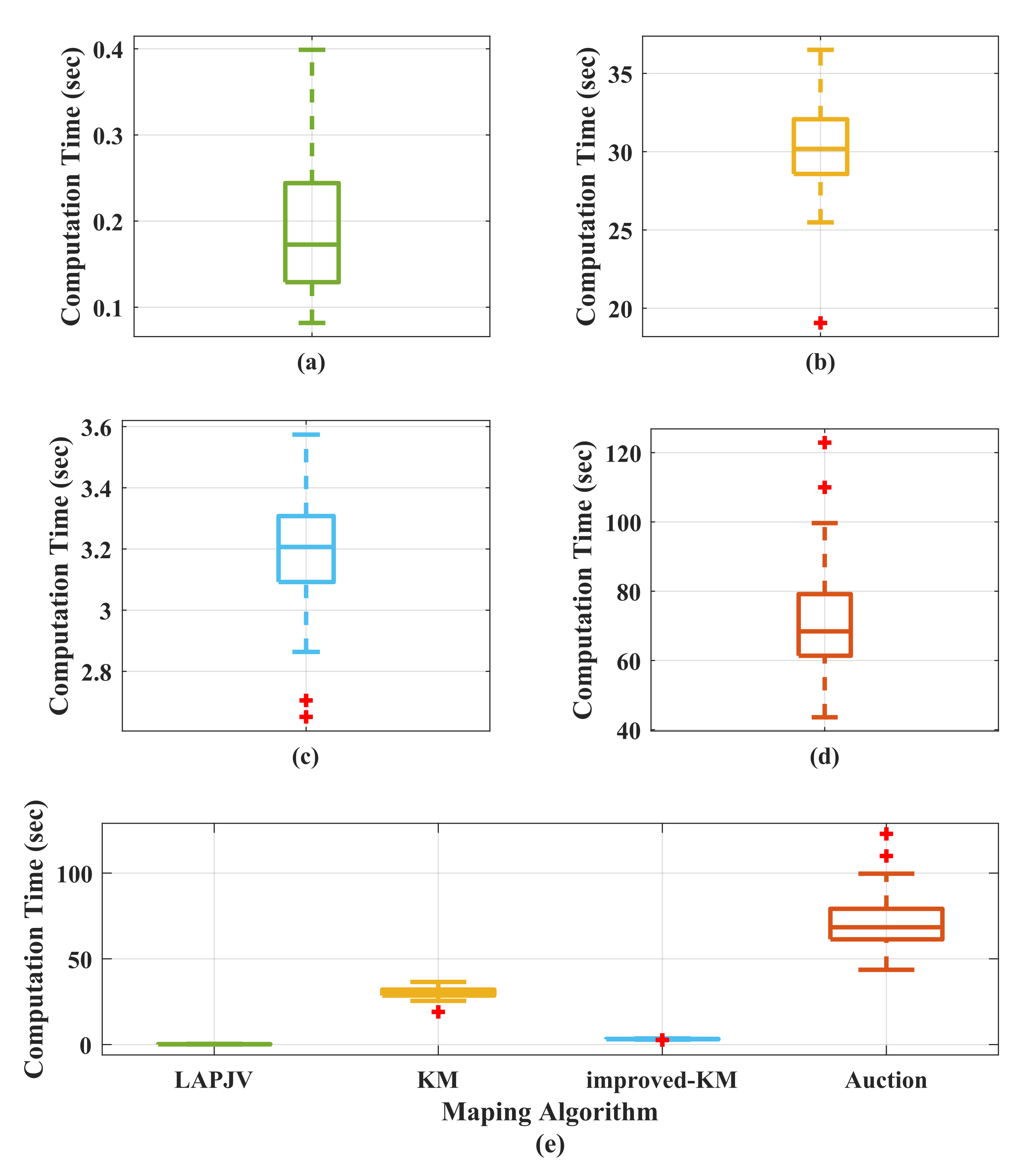
- Under the framework of the topology shaping optimization model, the topology shaping problem is transformed into a problem of relative coordinate mapping. The topology shaping with minimum global energy consumption is achieved by obtaining the optimal mapping relationship of the relative coordinates. The LAPJV algorithm is employed to solve this optimization model. The simulation results have demonstrated the effectiveness of this algorithm. The LAPJV algorithm significantly reduces the computational complexity by an average of in the case of 1000 UAV nodes while achieving the same minimum global energy consumption as other algorithms.
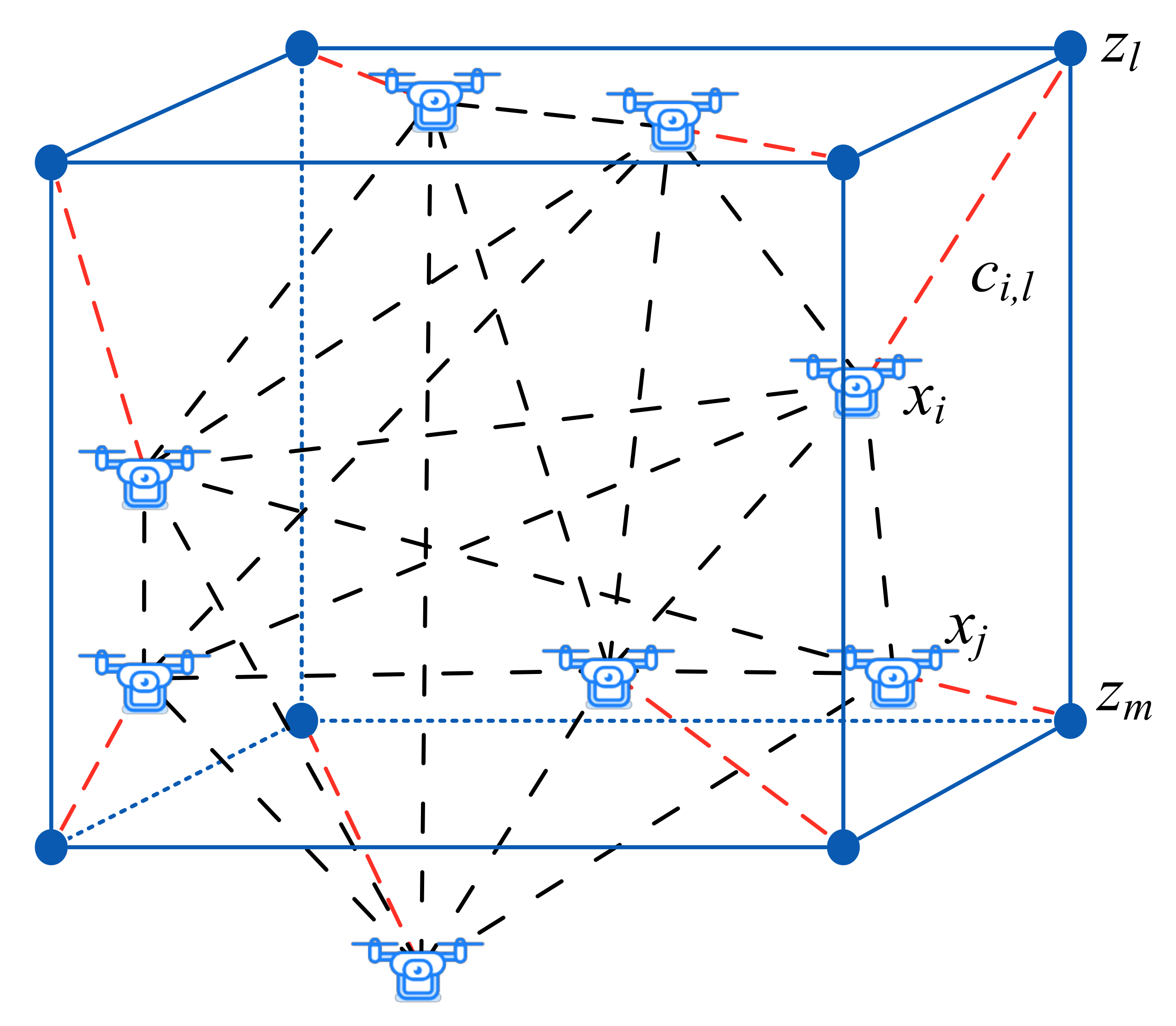
2. System Model
3. The Construction of Initial and Target Topology Coordinate Systems
| Algorithm 1: Obtaining the coordinate matrix. |
| Input: Distance matrix , coordinate dimension ; |
| Output: Relative coordinate matrix ; |
| 1 Derive by Equation (18) from ; |
| 2 Obtain Matrix from ; |
| 3 Eigen-decomposition of matrix and obtain the and of ; |
| 4 Form the diagonal matrix by employ 3 largest ; |
| 5 Construct matrix by ; |
| 6 Get by Equation (20); |
| 7 return; |
4. The Optimal Coordinate Mapping from Initial Topology to Target Topology
- Select an unassigned node in the initial topology .
- Construct the residual (auxiliary, incremental) graph, with costs .
- Find the shortest augmenting path via a modified Dijkstra algorithm (recall ).
- Augment the solution to improve the match, construct the auxiliary network and determine from unassigned row i to unassigned column j an alternating path of minimal total reduced cost.
- Update the dual variables so that CS conditions, i.e., , hold.
- The initialization phase including three sub-phases: column reduction, reduction transfer, augmenting row reduction.
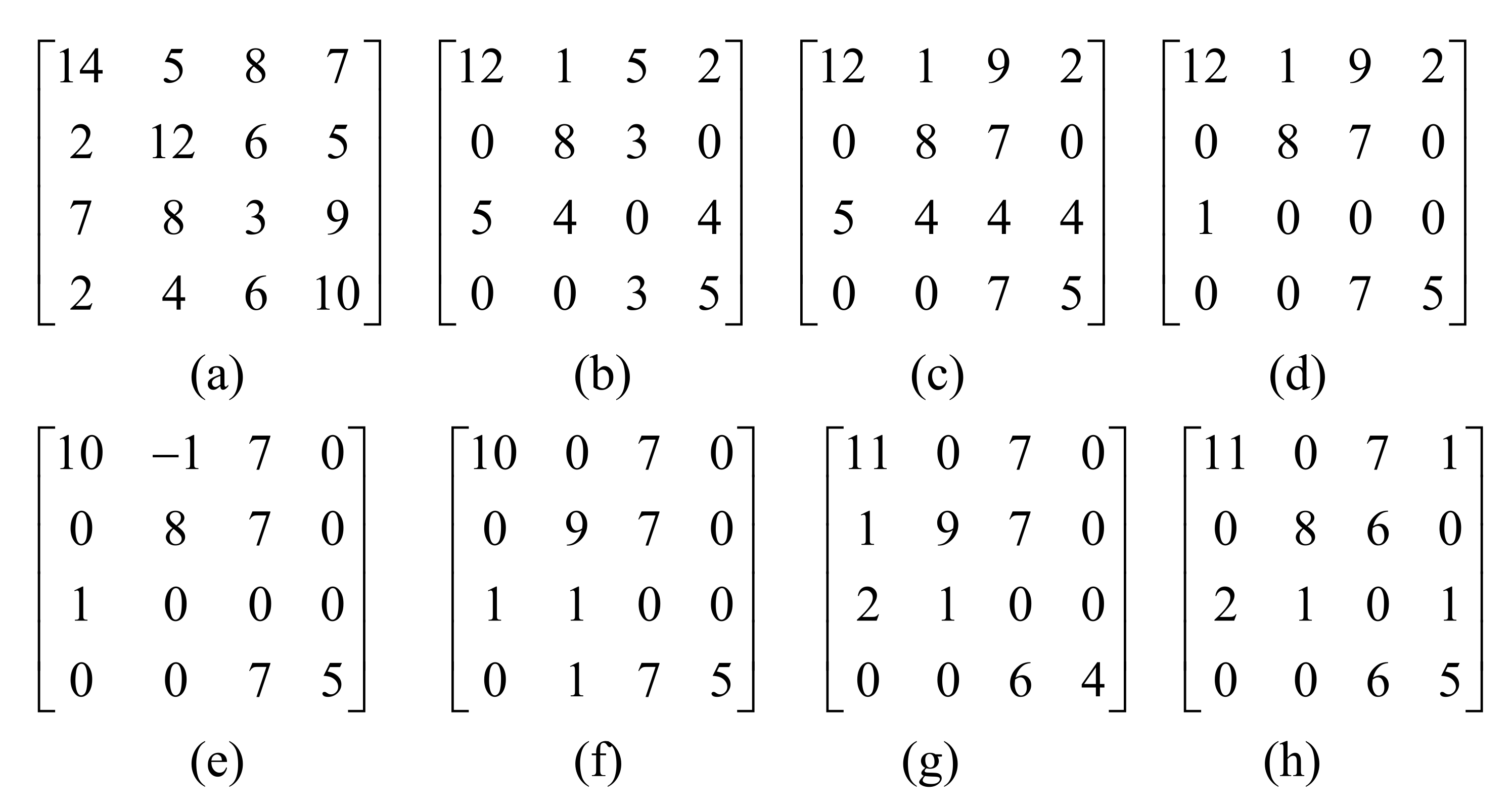
- (a)
- Column reduction. Each element of a column subtracts a positive value. For the input cost matrix , from right to left, subtract the smallest value in the current column from each element in each column of the input matrix, as shown in Algorithm 2 (from line 3 to line 11). In this process, each column is assigned to a minimal row element, and some rows may not be assigned.
- (b)
- Reduction transfer, further reducing the unassigned rows. First, suppose the minimum value in the row i is , then perform the inverse column reduction, i.e., add to all elements in column j. After that, subtract from all elements in row i, as shown in Algorithm 2 (from line 13 to line 16).
- (c)
- Augmenting row reduction, trying to find a set of alternate paths. Starting from an unassigned row i, i.e., a node in initial topology, attempt to find the alternate path by first finding the current minimum value of in row i, and then finding the second minimum value , where . Next, reduce all elements of row i by . If , the new is negative. Assign i to column j with the reverse column reduction for column j. If column j has previously been assigned to row m, repeat this step from row m. This repeats until either row m is matched to an unassigned column, or it becomes impossible to transfer reduction to the selected row m. This process is shown in Algorithm 2 (from line 18 to line 32).
- The augmentation phase, which is the core of the algorithm to construct a bijective graph. For each unassigned row, the augmentation phase will find a shortest alternate path to the unassigned column through a modified Dijkstra’s algorithm. Starting with an unassigned row i, the search returns a shortest path to column j. If column j is assigned to row k, then add row k to the path. If the distances via row k to any given column are shorter, update these distances. After augmentation, all assignments correspond to the minimum value of each row in the cost matrix, which finally leads to the assignment with the lowest weight, i.e., the minimum global energy consumption. The assignment is the mapping relationship from the initial topology coordinates to the target topology coordinates. This process is shown in Algorithm 3.
| Algorithm 2: Optimal Mapping Through Linear Assignment |
 |
| Algorithm 3: Augmentation Process of LAPJV |
 |
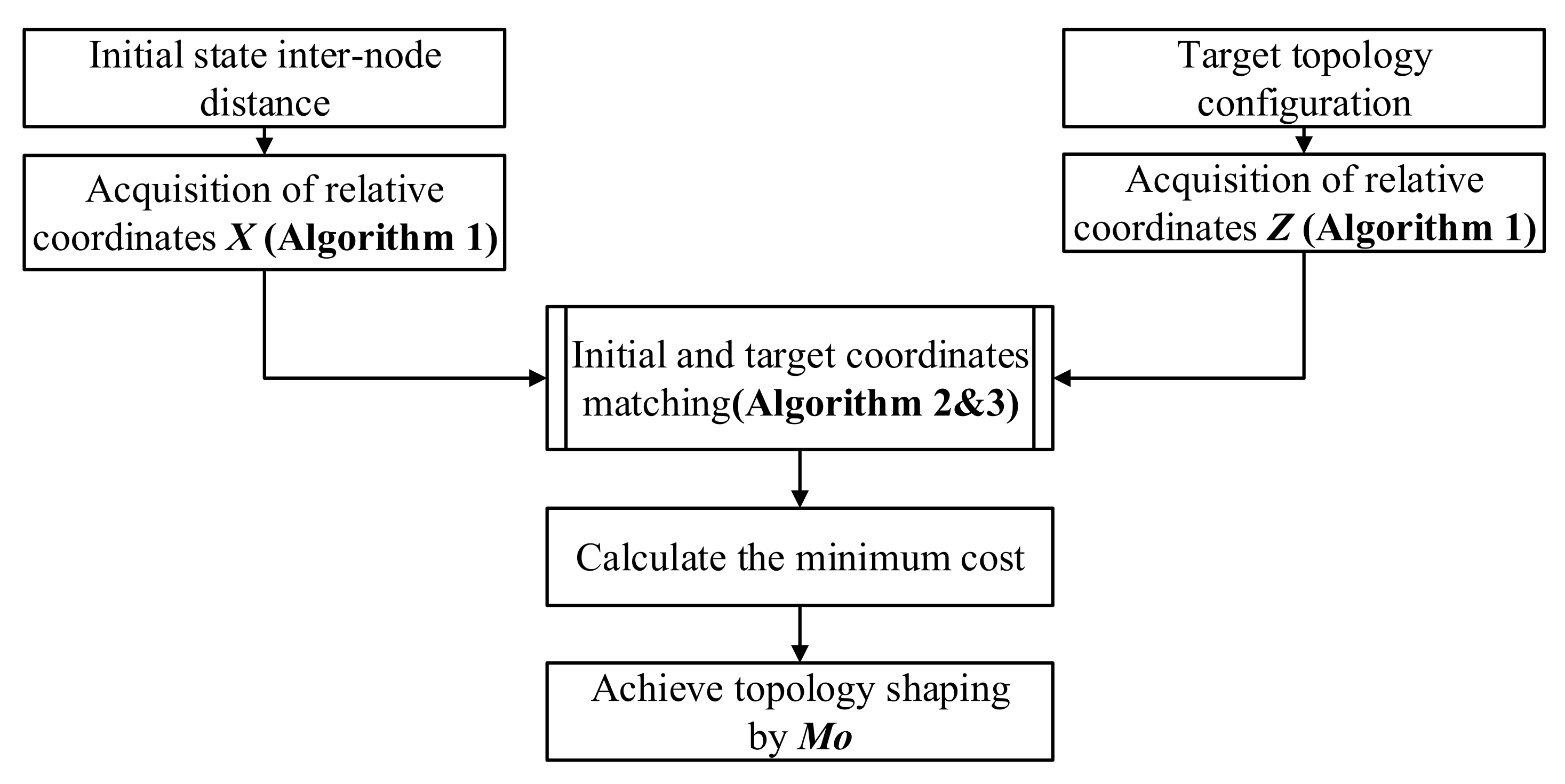
- Obtain the initial and target coordinates matrices and by Algorithm 1.
- Obtain the optimal coordinate mapping relationship by Algorithms 2 and 3.
- Achieve the topology shaping based on the optimal coordinate mapping relationship .
5. Numerical Results
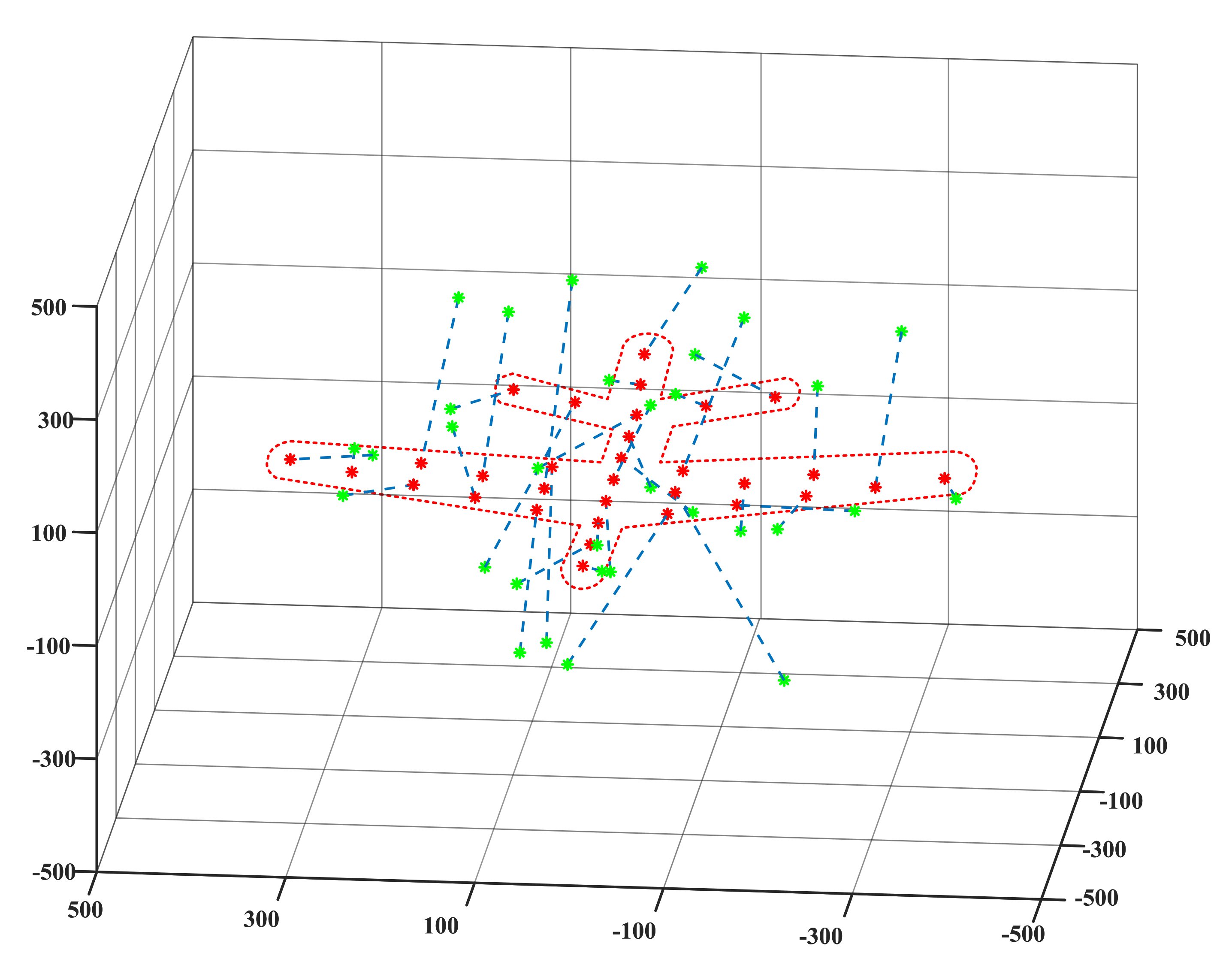
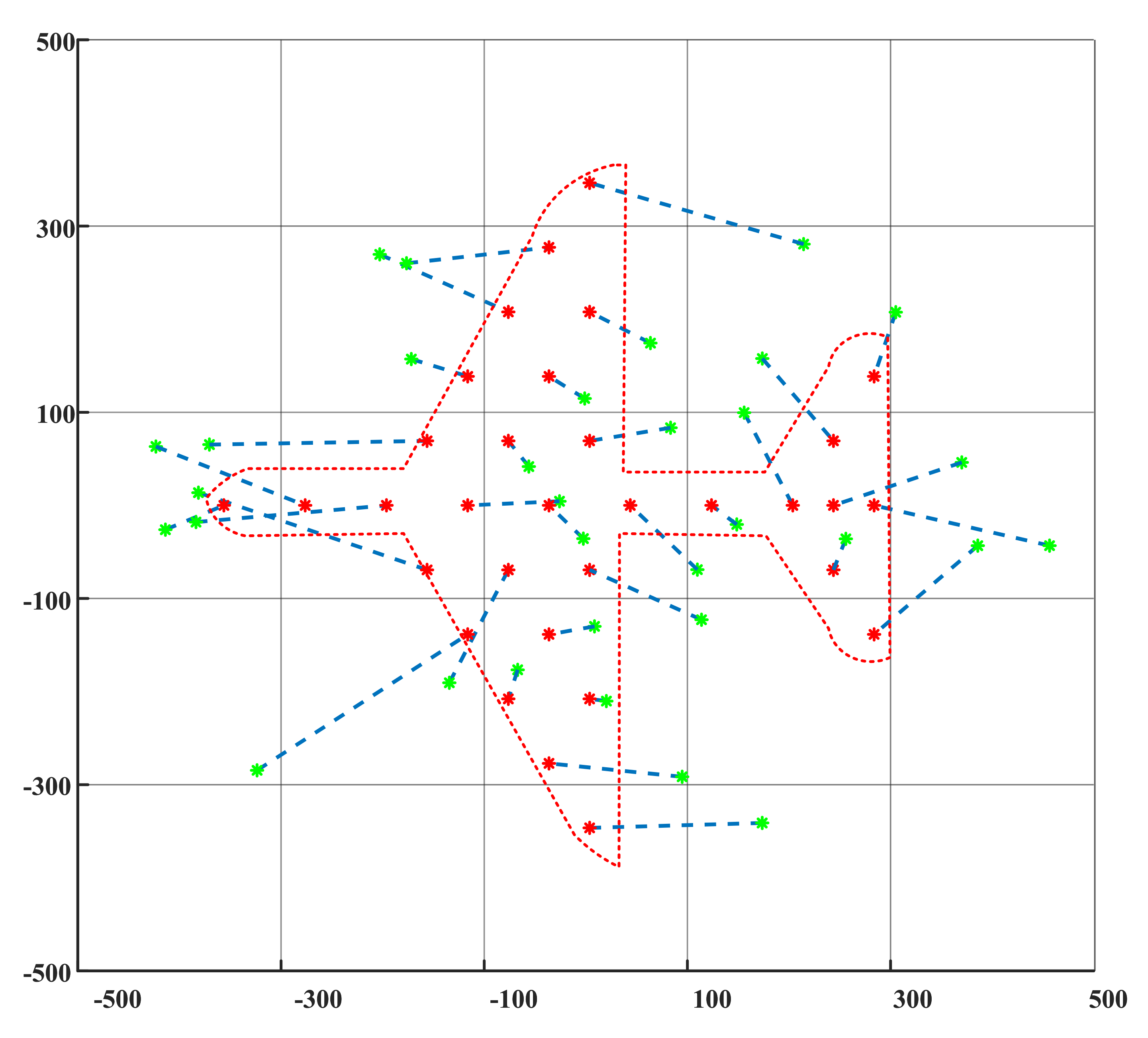
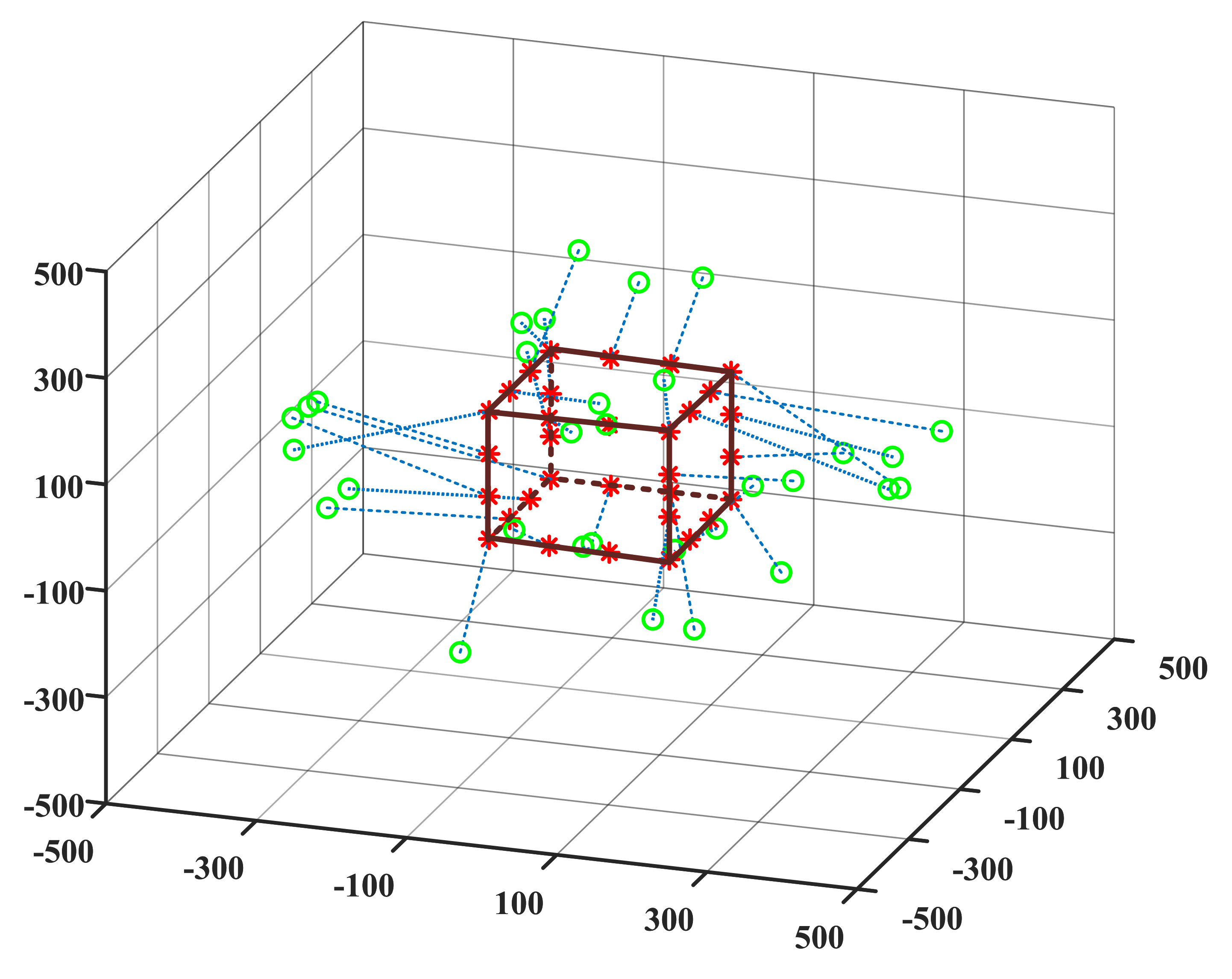
5.1. Validation of Proposed Topology Shaping Method
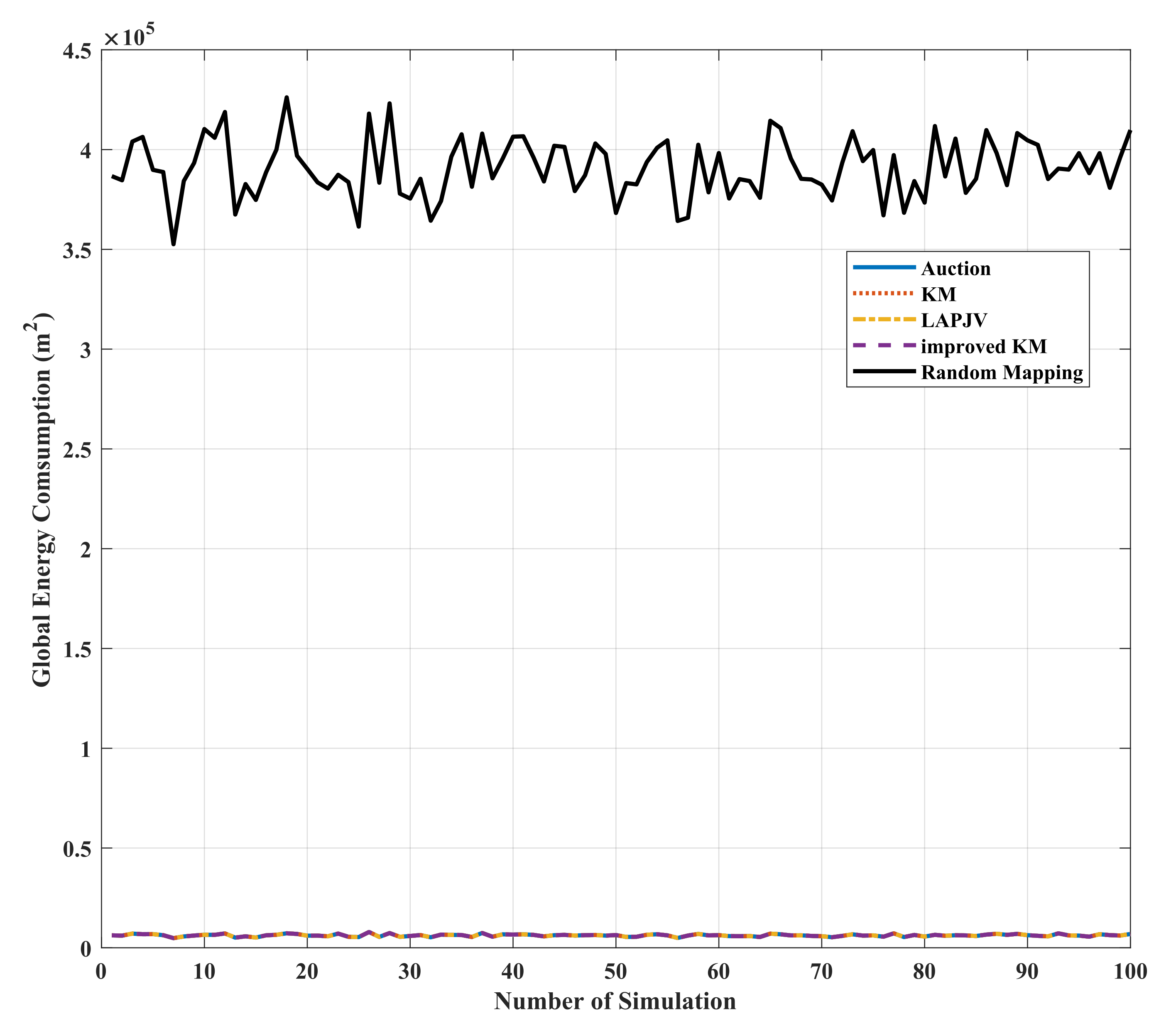
5.2. Global Energy Consumption
5.3. Computational Complexity
6. Conclusions and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lachow, I. The upside and downside of swarming drones. Bull. At. Sci. 2017, 73, 96–101. [Google Scholar] [CrossRef] [Green Version]
- Skorobogatov, G.; Barrado, C.; Salamí, E. Multiple UAV systems: A survey. Unmanned Syst. 2020, 8, 149–169. [Google Scholar] [CrossRef]
- Bekmezci, I.; Sahingoz, O.K.; Temel, Ş. Flying Ad-Hoc Networks (FANETs): A survey. Ad Hoc Netw. 2013, 11, 1254–1270. [Google Scholar] [CrossRef]
- Haque, M.E.; Asikuzzaman, M.; Khan, I.U.; Ra, I.H.; Hossain, M.S.; Shah, S.B.H. Comparative Study of IoT-Based Topology Maintenance Protocol in a Wireless Sensor Network for Structural Health Monitoring. Remote Sens. 2020, 12, 2358. [Google Scholar] [CrossRef]
- Liu, X.; Yin, J.; Zhang, S.; Ding, B.; Guo, S.; Wang, K. Range-Based Localization for Sparse 3-D Sensor Networks. IEEE Internet Things J. 2019, 6, 753–764. [Google Scholar] [CrossRef]
- Brook, A.; Ben-Dor, E. Automatic Registration of Airborne and Spaceborne Images by Topology Map Matching with SURF Processor Algorithm. Remote Sens. 2011, 3, 65–82. [Google Scholar] [CrossRef] [Green Version]
- Qiu, T.; Zhang, S.; Si, W.; Cao, Q.; Atiquzzaman, M. A 3D Topology Evolution Scheme with Self-Adaption for Industrial Internet of Things. IEEE Internet Things J. 2020, 8, 9473–9483. [Google Scholar] [CrossRef]
- Aslan, M.F.; Durdu, A.; Sabanci, K.; Ropelewska, E.; Gültekin, S.S. A Comprehensive Survey of the Recent Studies with UAV for Precision Agriculture in Open Fields and Greenhouses. Appl. Sci. 2022, 12, 1047. [Google Scholar] [CrossRef]
- Doherty, P.; Rudol, P. A UAV Search and Rescue Scenario with Human Body Detection and Geolocalization. In AI 2007: Advances in Artificial Intelligence; Orgun, M.A., Thornton, J., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 1–13. [Google Scholar]
- Shakhatreh, H.; Sawalmeh, A.H.; Al-Fuqaha, A.; Dou, Z.; Almaita, E.; Khalil, I.; Othman, N.S.; Khreishah, A.; Guizani, M. Unmanned aerial vehicles (UAVs): A survey on civil applications and key research challenges. IEEE Access 2019, 7, 48572–48634. [Google Scholar] [CrossRef]
- Junwei, Z.; Jianjun, Z. Study on multi-UAV task clustering and task planning in cooperative reconnaissance. In Proceedings of the 2014 Sixth International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2014; Volume 2, pp. 392–395. [Google Scholar]
- Chen, H.X.; Nan, Y.; Yang, Y. Multi-UAV reconnaissance task assignment for heterogeneous targets based on modified symbiotic organisms search algorithm. Sensors 2019, 19, 734. [Google Scholar] [CrossRef] [Green Version]
- He, X.; Yu, W.; Xu, H.; Lin, J.; Yang, X.; Lu, C.; Fu, X. Towards 3D deployment of UAV base stations in uneven terrain. In Proceedings of the 2018 27th International Conference on Computer Communication and Networks (ICCCN), Hangzhou, China, 30 July–2 August 2018; pp. 1–9. [Google Scholar]
- Lu, J.; Wan, S.; Chen, X.; Chen, Z.; Fan, P.; Letaief, K.B. Beyond Empirical Models: Pattern Formation Driven Placement of UAV Base Stations. IEEE Trans. Wirel. Commun. 2018, 17, 3641–3655. [Google Scholar] [CrossRef]
- Luo, D.; Xu, W.; Wu, S.; Ma, Y. UAV formation flight control and formation switch strategy. In Proceedings of the 2013 8th International Conference on Computer Science Education, Colombo, Sri Lanka, 26–28 April 2013; pp. 264–269. [Google Scholar] [CrossRef]
- Nedjah, N.; de Macedo Mourelle, L. Swarm Intelligent Systems; Springer: Berlin, Germany, 2006; Volume 26, pp. 3–25. [Google Scholar]
- Yang, Y.; Xiao, Y.; Li, T. A Survey of Autonomous Underwater Vehicle Formation: Performance, Formation Control, and Communication Capability. IEEE Commun. Surv. Tutor. 2021, 23, 815–841. [Google Scholar] [CrossRef]
- Liu, X.; Liu, Y.; Chen, Y.; Hanzo, L. Trajectory design and power control for multi-UAV assisted wireless networks: A machine learning approach. IEEE Trans. Veh. Technol. 2019, 68, 7957–7969. [Google Scholar] [CrossRef] [Green Version]
- Chung, S.J.; Paranjape, A.A.; Dames, P.; Shen, S.; Kumar, V. A survey on aerial swarm robotics. IEEE Trans. Robot. 2018, 34, 837–855. [Google Scholar] [CrossRef] [Green Version]
- Morgan, D.; Subramanian, G.P.; Chung, S.J.; Hadaegh, F.Y. Swarm assignment and trajectory optimization using variable-swarm, distributed auction assignment and sequential convex programming. Int. J. Robot. Res. 2016, 35, 1261–1285. [Google Scholar] [CrossRef] [Green Version]
- Brandão, A.S.; Sarcinelli-Filho, M. On the guidance of multiple uav using a centralized formation control scheme and delaunay triangulation. J. Intell. Robot. Syst. 2016, 84, 397–413. [Google Scholar] [CrossRef]
- Abeywickrama, H.V.; Jayawickrama, B.A.; He, Y.; Dutkiewicz, E. Empirical Power Consumption Model for UAVs. In Proceedings of the 2018 IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL USA, 27–30 August 2018; pp. 1–5. [Google Scholar]
- Babazadeh, R.; Selmic, R. Distance-Based Multiagent Formation Control with Energy Constraints Using SDRE. IEEE Trans. Aerosp. Electron. Syst. 2019, 56, 41–56. [Google Scholar] [CrossRef]
- Sui, Z.; Pu, Z.; Yi, J. Optimal UAVs formation transformation strategy based on task assignment and Particle Swarm Optimization. In Proceedings of the 2017 IEEE International Conference on Mechatronics and Automation (ICMA), Kagawa, Japan, 6–9 August 2017; pp. 1804–1809. [Google Scholar] [CrossRef]
- Fabra, F.; Wubben, J.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Efficient and coordinated vertical takeoff of UAV swarms. In Proceedings of the 2020 IEEE 91st Vehicular Technology Conference (VTC2020-Spring), Antwerp, Belgium, 25–28 May 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Wubben, J.; Aznar, P.; Fabra, F.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Toward secure, efficient, and seamless reconfiguration of UAV swarm formations. In Proceedings of the 2020 IEEE/ACM 24th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Prague, Czech Republic, 14–16 September 2020; pp. 1–7. [Google Scholar] [CrossRef]
- Wubben, J.; Cecilia, J.M.; Calafate, C.T.; Cano, J.C.; Manzoni, P. Evaluating the effectiveness of takeoff assignment strategies under irregular configurations. In Proceedings of the 2021 IEEE/ACM 25th International Symposium on Distributed Simulation and Real Time Applications (DS-RT), Valencia, Spain, 27–29 September 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Gravell, B.; Summers, T. Concurrent goal assignment and collision-free trajectory generation for multiple aerial robots. IFAC-PapersOnLine 2018, 51, 75–81. [Google Scholar] [CrossRef]
- Azam, M.A.; Mittelmann, H.D.; Ragi, S. UAV Formation Shape Control via Decentralized Markov Decision Processes. Algorithms 2021, 14, 91. [Google Scholar] [CrossRef]
- Fu, X.; Pan, J.; Wang, H.; Gao, X. A formation maintenance and reconstruction method of UAV swarm based on distributed control. Aerosp. Sci. Technol. 2020, 104, 105981. [Google Scholar] [CrossRef]
- Duan, H.b.; Ma, G.j.; Luo, D.l. Optimal formation reconfiguration control of multiple UCAVs using improved particle swarm optimization. J. Bionic Eng. 2008, 5, 340–347. [Google Scholar] [CrossRef]
- Zhang, X.; Duan, H.; Yang, C. Pigeon-Inspired optimization approach to multiple UAVs formation reconfiguration controller design. In Proceedings of the 2014 IEEE Chinese Guidance, Navigation and Control Conference, Yantai, China, 8–10 August 2014; pp. 2707–2712. [Google Scholar] [CrossRef]
- Duan, H.; Luo, Q.; Shi, Y.; Ma, G. Hybrid Particle Swarm Optimization and Genetic Algorithm for Multi-UAV Formation Reconfiguration. IEEE Comput. Intell. Mag. 2013, 8, 16–27. [Google Scholar] [CrossRef]
- Balamurugan, G.; Valarmathi, J.; Naidu, V.P.S. Survey on UAV navigation in GPS denied environments. In Proceedings of the 2016 International Conference on Signal Processing, Communication, Power and Embedded System (SCOPES), Paralakhemundi, India, 3–5 October 2016; pp. 198–204. [Google Scholar] [CrossRef]
- Oh, D.; Lim, J.; Lee, J.K.; Baek, H. Airborne-Relay-based Algorithm for Locating Crashed UAVs in GPS-Denied Environments. In Proceedings of the 2019 IEEE 10th Annual Ubiquitous Computing, Electronics Mobile Communication Conference (UEMCON), New York, NY, USA, 10–12 October 2019; pp. 0877–0882. [Google Scholar] [CrossRef]
- Abbe, E.; Fan, J.; Wang, K. An theory lp of PCA and spectral clustering. arXiv 2020, arXiv:2006.14062. [Google Scholar]
- Torgerson, W.S. Multidimensional scaling: I. Theory and method. Psychometrika 1952, 17, 401–419. [Google Scholar] [CrossRef]
- Tzeng, J.; Lu, H.H.S.; Li, W.H. Multidimensional scaling for large genomic data sets. BMC Bioinform. 2008, 9, 179. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Saeed, N.; Nam, H.; Haq, M.I.U.; Muhammad Saqib, D.B. A survey on multidimensional scaling. ACM Comput. Surv. (CSUR) 2018, 51, 1–25. [Google Scholar] [CrossRef] [Green Version]
- Wickelmaier, F. An introduction to MDS. Sound Qual. Res. Unit Aalb. Univ. Den. 2003, 46, 1–26. [Google Scholar]
- Jonker, R.; Volgenant, T. Improving the Hungarian assignment algorithm. Oper. Res. Lett. 1986, 5, 171–175. [Google Scholar] [CrossRef]
- Jonker, R.; Volgenant, A. A shortest augmenting path algorithm for dense and sparse linear assignment problems. Computing 1987, 38, 325–340. [Google Scholar] [CrossRef]
- Dell’Amico, M.; Toth, P. Algorithms and codes for dense assignment problems: The state of the art. Discret. Appl. Math. 2000, 100, 17–48. [Google Scholar] [CrossRef] [Green Version]
- Jones, W.; Chawdhary, A.; King, A. Optimising the Volgenant–Jonker algorithm for approximating graph edit distance. Pattern Recognit. Lett. 2017, 87, 47–54, Advances in Graph-based Pattern Recognition. [Google Scholar] [CrossRef] [Green Version]
- Lawler, E.L. Combinatorial Optimization: Networks and Matroids; Courier Corporation: Chelmsford, MA, USA, 2001. [Google Scholar]
- Schwartz, B. A computational analysis of the auction algorithm. Eur. J. Oper. Res. 1994, 74, 161–169. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number of nodes | 32 |
| Spatial area | 1000 m × 1000 m × 1000 m |
| Aircraft length | 350 m |
| Aircraft wingspan | 350 m |
| Aircraft height | 70 m |
| Accuracy requirement | 10 |
| Number of nodes | 32 |
| Spatial area | 1000 m × 1000 m × 1000 m |
| Cube side length | 240 m |
| Accuracy requirement | 10 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, Y.; Zhang, X.; Zhou, J.; Li, B.; Qin, K. A Relative Coordinate-Based Topology Shaping Method for UAV Swarm with Low Computational Complexity. Appl. Sci. 2022, 12, 2631. https://doi.org/10.3390/app12052631
Yang Y, Zhang X, Zhou J, Li B, Qin K. A Relative Coordinate-Based Topology Shaping Method for UAV Swarm with Low Computational Complexity. Applied Sciences. 2022; 12(5):2631. https://doi.org/10.3390/app12052631
Chicago/Turabian StyleYang, Yanxiang, Xiangyin Zhang, Jiayi Zhou, Bo Li, and Kaiyu Qin. 2022. "A Relative Coordinate-Based Topology Shaping Method for UAV Swarm with Low Computational Complexity" Applied Sciences 12, no. 5: 2631. https://doi.org/10.3390/app12052631
APA StyleYang, Y., Zhang, X., Zhou, J., Li, B., & Qin, K. (2022). A Relative Coordinate-Based Topology Shaping Method for UAV Swarm with Low Computational Complexity. Applied Sciences, 12(5), 2631. https://doi.org/10.3390/app12052631