
An Improved Dingo Optimization Algorithm Applied to SHE-PWM Modulation Strategy

 , , and
, , and 
Abstract
:1. Introduction
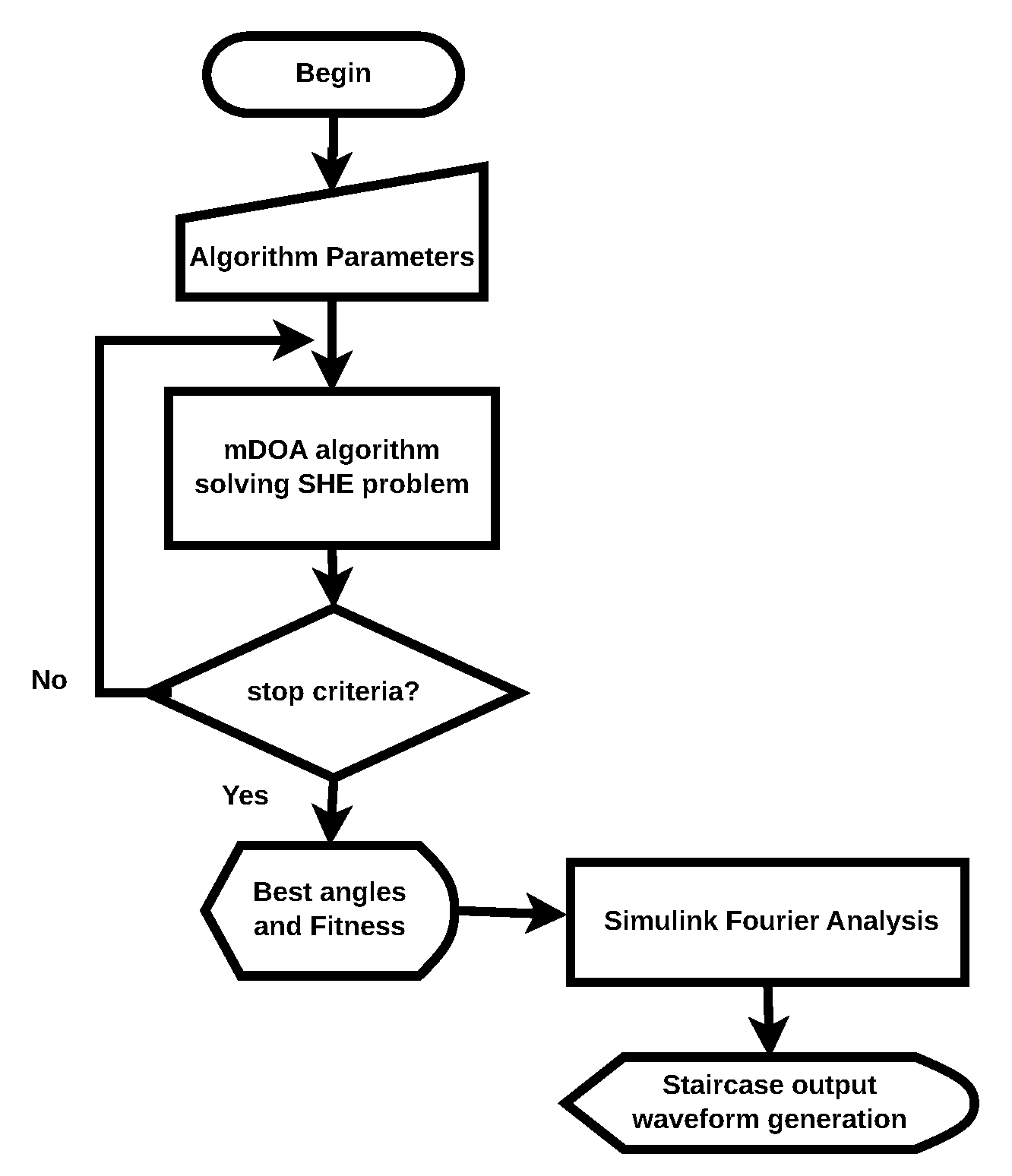
2. Materials and Methods
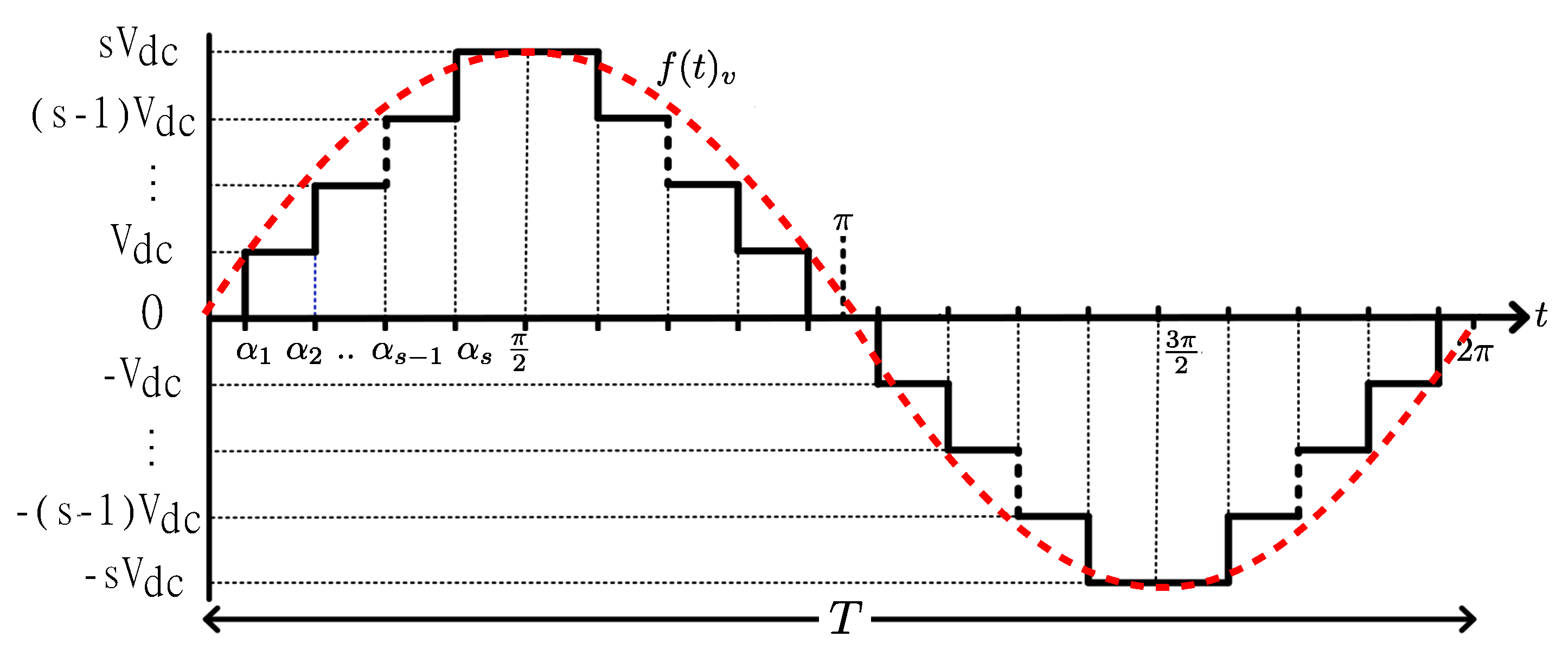
2.1. Selective Harmonic Elimination Method
2.2. Standard Dingo Optimization Algorithm (DOA)
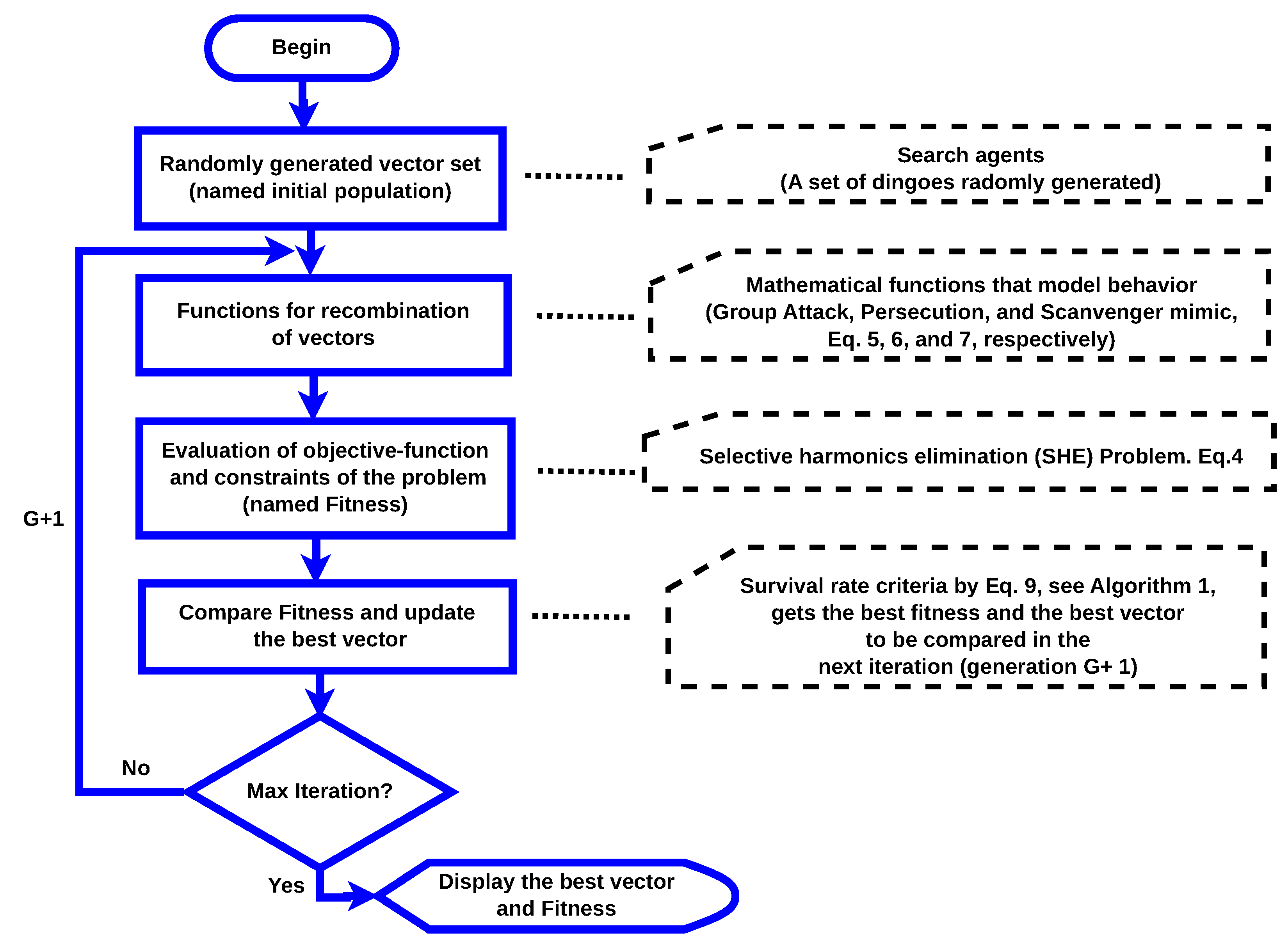
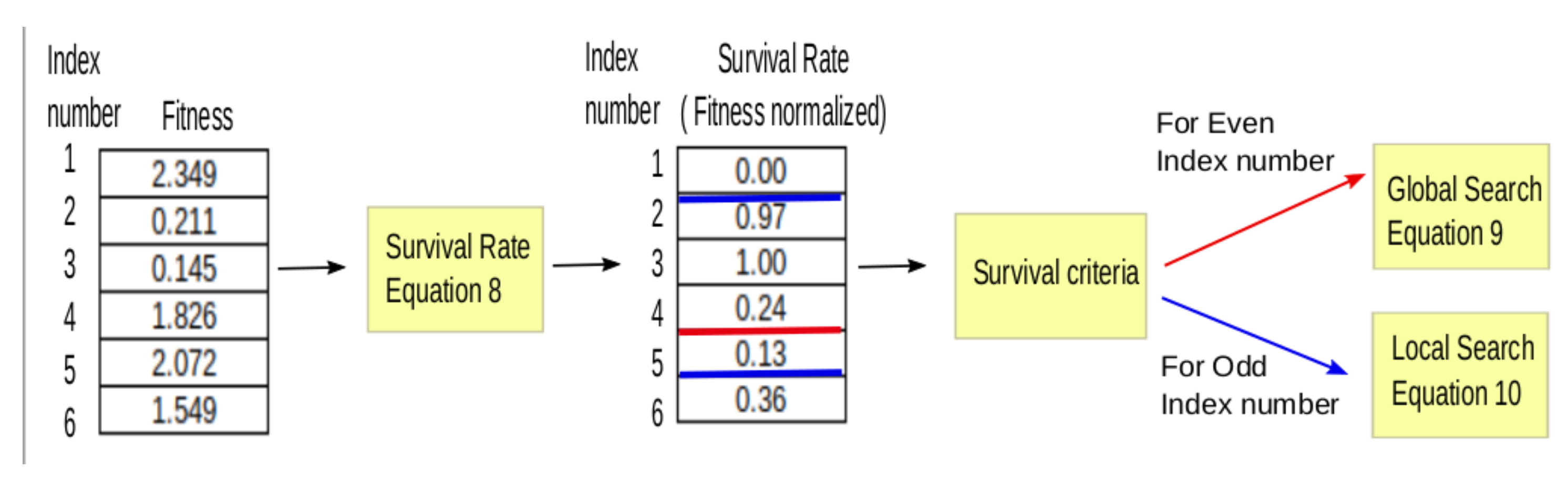
2.3. Modified Dingo Optimization Algorithm (mDOA)
| Algorithm 1 Survival procedure |
| 1: Begin procedure 2: for to sizePopulation do 3: if then 4: if i is Even then 5: Strategy 4: search agent updated by Equation (9). 6: else 7: Strategy 4: search agent updated by Equation (10). 8: end if 9: end if 10: end for 11: End procedure |
Pseudo Code for mDOA
| Algorithm 2 Modified Dingo Optimizer Algorithm (mDOA) |
| 1: procedure DOA Taken from [27] and updated with our approach 2: Initialization of parameters 3: , probability of hunting or scavenger strategy 4: , probability of Strategy 1 (group attack) or Strategy 2 (persecution attack) 5: Generate the initial population 6: while iteration < Max Number of Iterations do 7: if then 8: if then 9: Strategy 1: Group Attack Procedure, Equation (5). 10: else 11: Strategy 2: Persecution, Equation (6). 12: end if 13: else 14: Strategy 3: Scavenger, Equation (7). 15: end if 16: Update search agents that have low survival value, Algorithm 1, Equation (9) or (10). 17: Calculate , the fitness value of the new search agents 18: if then 19: 20: end if 21: 22: end while 23: Display , the best optimal solution 24: end procedure |
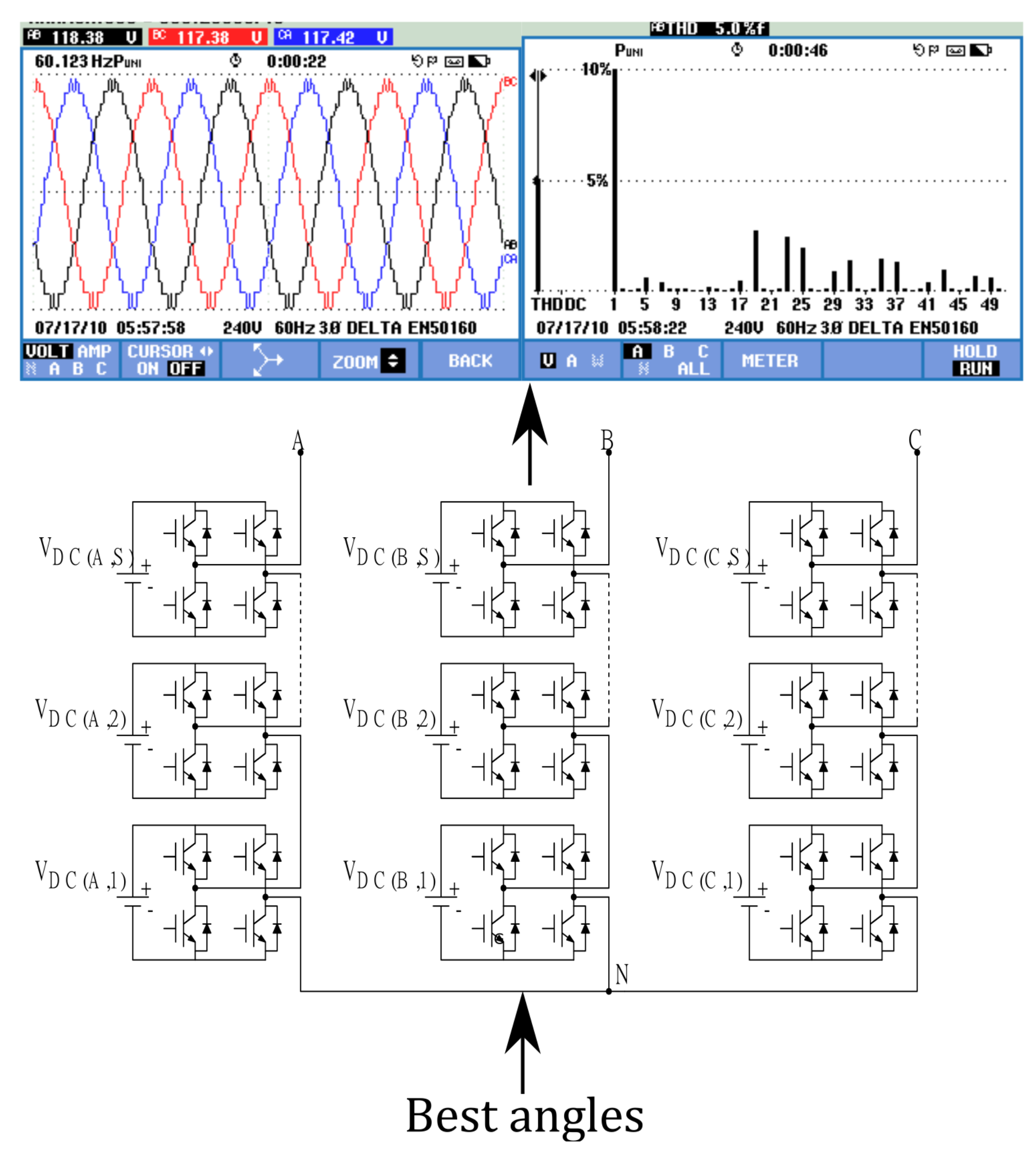
3. Experimental Setup
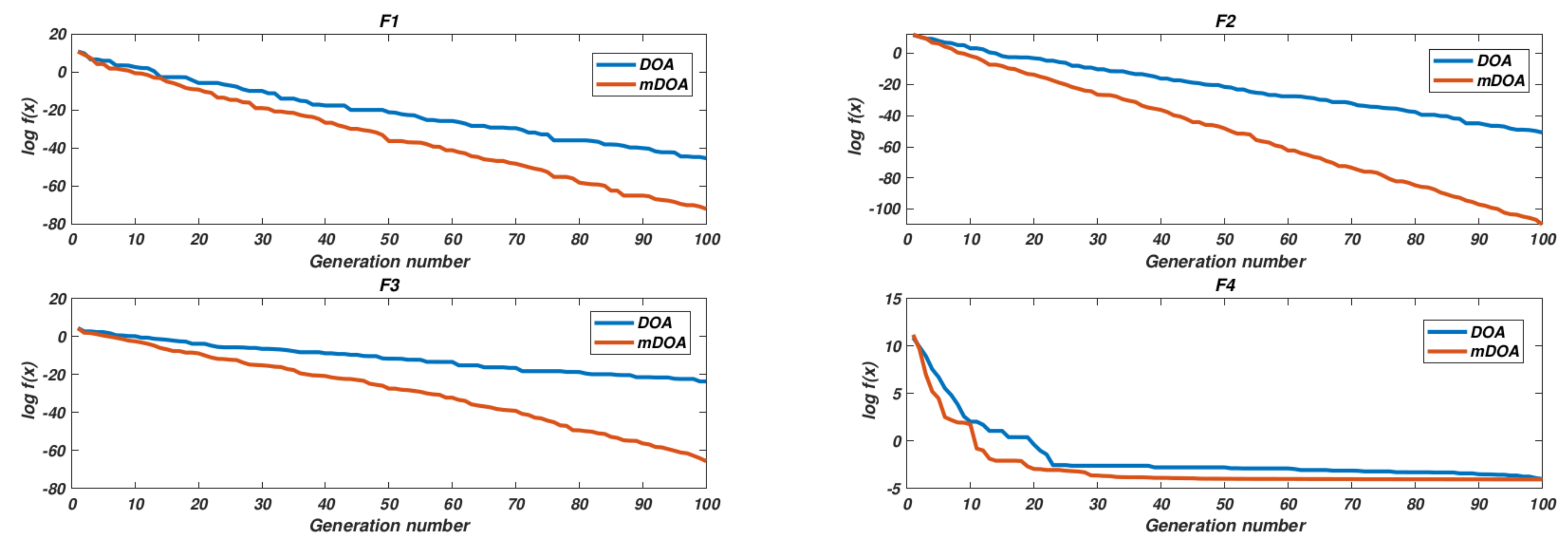
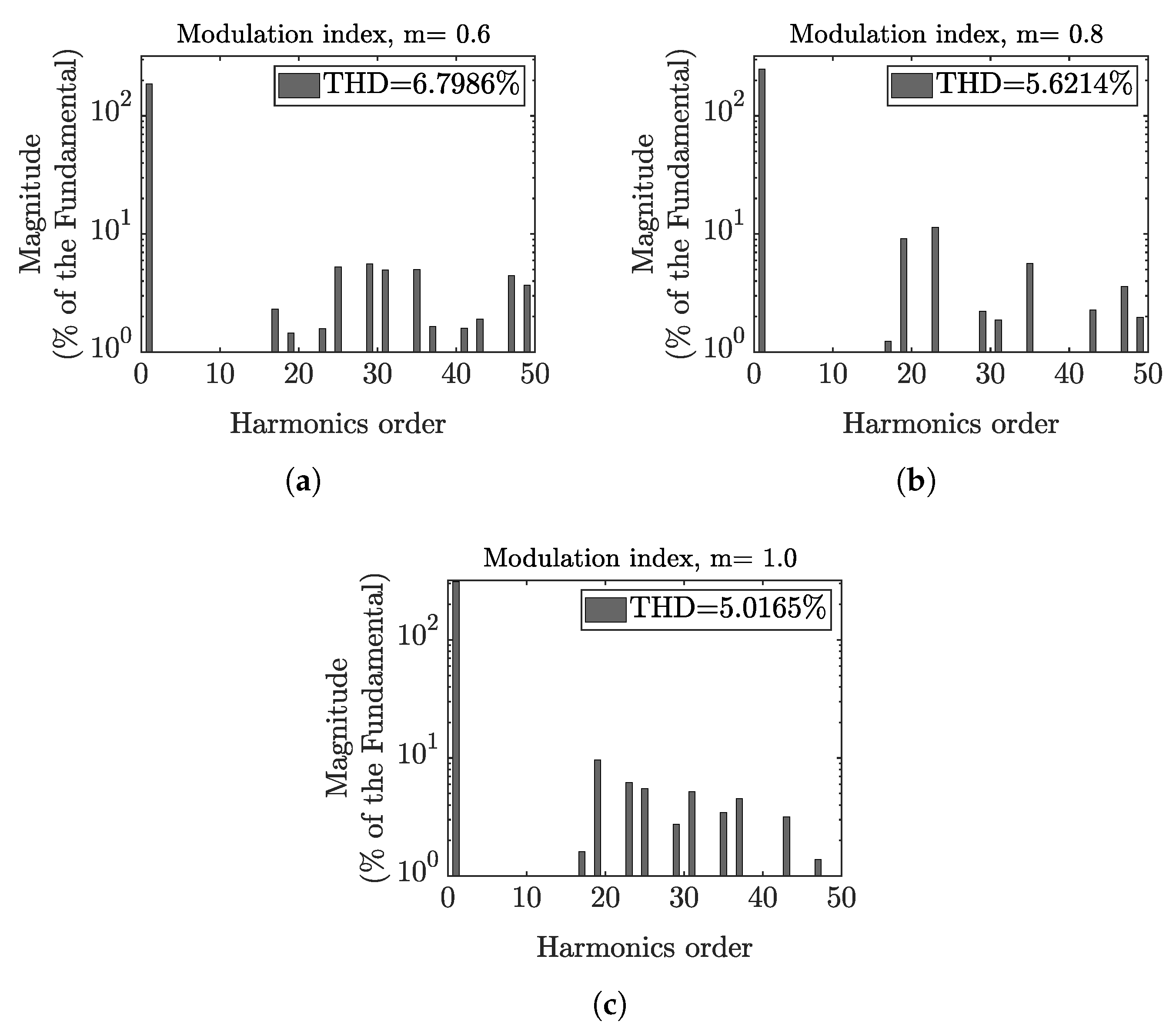
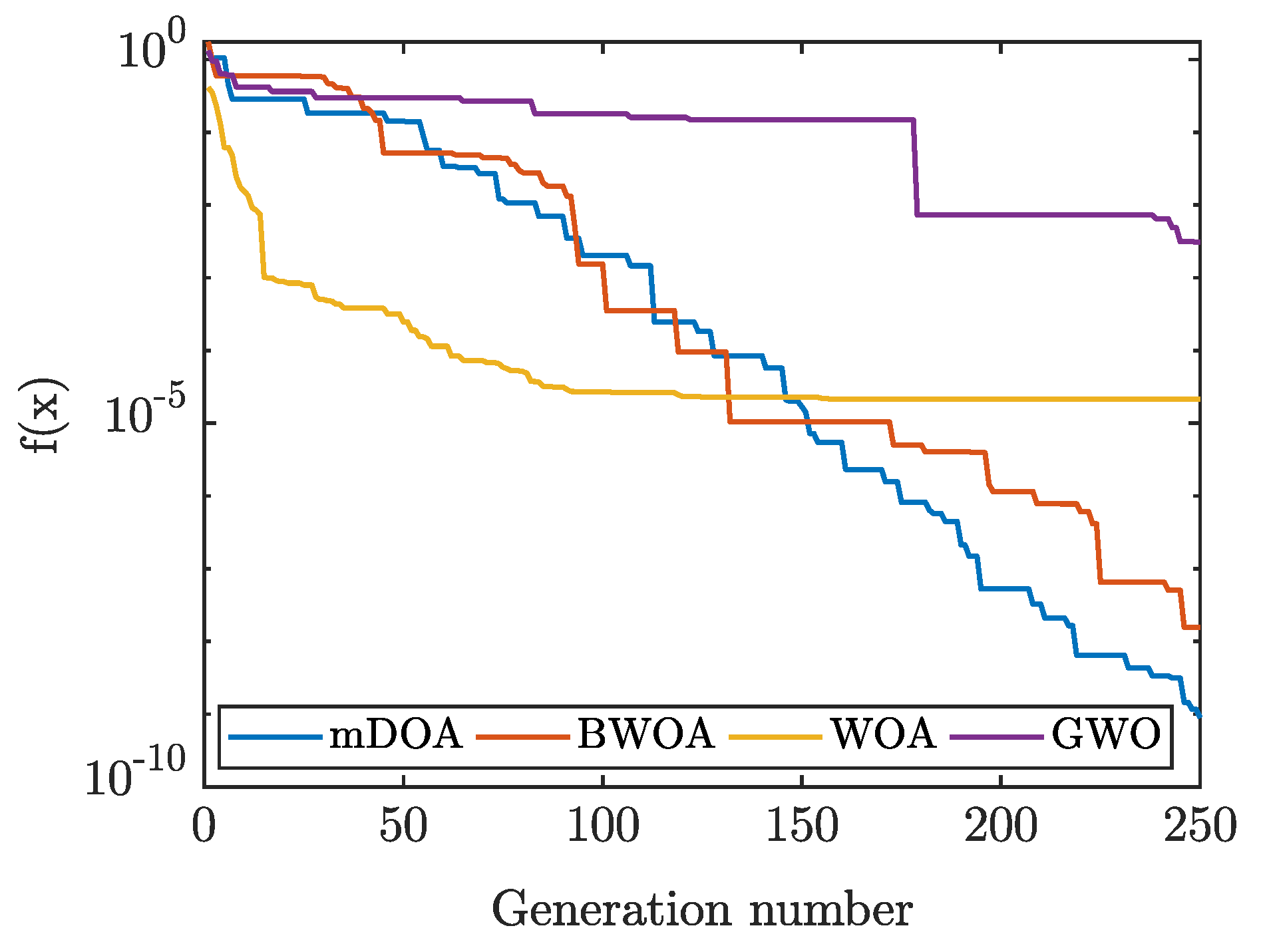
4. Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Moeed Amjad, A.; Salam, Z. A review of soft computing methods for harmonics elimination PWM for inverters in renewable energy conversion systems. Renew. Sustain. Energy Rev. 2014, 33, 141–153. [Google Scholar] [CrossRef]
- José, R.; Franquelo, L.G.; Samir, K.; León, J.I.; Portillo, R.C.; Prats, M.Á.M.; Pérez, M.A. 03 Multilevel converters: An enabling technology for high-poer applications. Proc. IEEE 2009, 97, 1786–1817. [Google Scholar] [CrossRef] [Green Version]
- Vijeh, M.; Rezanejad, M.; Samadaei, E.; Bertilsson, K. A General Review of Multilevel Inverters Based on Main Submodules: Structural Point of View. IEEE Trans. Power Electron. 2019, 34, 9479–9502. [Google Scholar] [CrossRef]
- Dahidah, M.S.; Konstantinou, G.; Agelidis, V.G. A Review of Multilevel Selective Harmonic Elimination PWM: Formulations, Solving Algorithms, Implementation and Applications. IEEE Trans. Power Electron. 2015, 30, 4091–4106. [Google Scholar] [CrossRef]
- El-Hosainy, A.; Hamed, H.A.; Azazi, H.Z.; El-Kholy, E.E. A review of multilevel inverter topologies, control techniques, and applications. In Proceedings of the 2017 Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1265–1275. [Google Scholar]
- Colak, I.; Kabalci, E.; Bayindir, R. Review of multilevel voltage source inverter topologies and control schemes. Energy Convers. Manag. 2011, 52, 1114–1128. [Google Scholar] [CrossRef]
- Guan, E.; Song, P.; Ye, M.; Wu, B. Selective harmonic elimination techniques for multilevel cascaded H-bridge inverters. In Proceedings of the International Conference on Power Electronics and Drive Systems, Kuala Lumpur, Malaysia, 28 November–1 December 2005; Volume 2, pp. 1441–1446. [Google Scholar] [CrossRef]
- Siddique, M.D.; Mekhilef, S.; Padmanaban, S.; Memon, M.A.; Kumar, C. Single-Phase Step-Up Switched-Capacitor-Based Multilevel Inverter Topology with SHEPWM. IEEE Trans. Ind. Appl. 2021, 57, 3107–3119. [Google Scholar] [CrossRef]
- El-Naggar, K.; Abdelhamid, T.H. Selective harmonic elimination of new family of multilevel inverters using genetic algorithms. Energy Convers. Manag. 2008, 49, 89–95. [Google Scholar] [CrossRef]
- Al-Othman, A.K.; Abdelhamid, T.H. Elimination of harmonics in multilevel inverters with non-equal dc sources using PSO. Energy Convers. Manag. 2009, 50, 756–764. [Google Scholar] [CrossRef]
- Sun, J.; Grotstollen, H. Solving nonlinear equations for selective harmonic eliminated PWM using predicted initial values. In Proceedings of the 1992 International Conference on Industrial Electronics, Control, Instrumentation, and Automation, San Diego, CA, USA, 9–13 November 1992; Volume 1, pp. 259–264. [Google Scholar] [CrossRef]
- Kavousi, A.; Vahidi, B.; Salehi, R.; Bakhshizadeh, M.K.; Farokhnia, N.; Fathi, S.H. Application of the Bee Algorithm for Selective Harmonic Elimination Strategy in Multilevel Inverters. IEEE Trans. Power Electron. 2012, 27, 1689–1696. [Google Scholar] [CrossRef]
- Patil, S.D.; Kadwane, S.G.; Gawande, S.P. Ant Colony Optimization applied to selective harmonic elimination in Multilevel inverters. In Proceedings of the 2016 2nd International Conference on Applied and Theoretical Computing and Communication Technology (iCATccT), Bangalore, India, 21–23 July 2016; pp. 637–640. [Google Scholar]
- Routray, A.; Singh, R.K.; Mahanty, R. Modified Particle Swarm Optimization Based Harmonic Minimization in Hybrid Cascaded Multilevel Inverter. In Proceedings of the 2018 IEEE Energy Conversion Congress and Exposition, ECCE 2018, Portland, OR, USA, 23–27 September 2018; Volume 15, pp. 5573–5578. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H.; Peña-Delgado, A.; Ranjan, P.; Barde, C.; Choubey, A.; Morales-Cepeda, A.B. A Bio-Inspired Method for Mathematical Optimization Inspired by Arachnida Salticidade. Mathematics 2022, 10, 102. [Google Scholar] [CrossRef]
- Panda, K.P.; Bana, P.R.; Panda, G. FPA Optimized Selective Harmonic Elimination in Symmetric-Asymmetric Reduced Switch Cascaded Multilevel Inverter. IEEE Trans. Ind. Appl. 2020, 56, 2862–2870. [Google Scholar] [CrossRef]
- Kar, P.K.; Priyadarshi, A.; Karanki, S.B. Selective harmonics elimination using whale optimisation algorithm for a single-phase-modified source switched multilevel inverter. IET Power Electron. 2019, 12, 1952–1963. [Google Scholar] [CrossRef]
- Routray, A.; Member, S.; Singh, R.K.; Member, S.; Mahanty, R. Harmonic Reduction in Hybrid Cascaded Multilevel Inverter Using Modified Grey Wolf Optimization. IEEE Trans. Ind. Appl. 2019, 56, 1827–1838. [Google Scholar] [CrossRef]
- Memon, M.A.; Mekhilef, S.; Mubin, M.; Siddique, M.D.; Dardeer, M. Comparative Analysis of Optimal and Fixed Input DC Sources with Selective Harmonic Elimination Pulse Width Modulation. In Proceedings of the IEEE Conference on Power Electronics and Renewable Energy, CPERE 2019, Aswan, Egypt, 23–25 October 2019; pp. 94–98. [Google Scholar] [CrossRef]
- Memon, M.A.; Siddique, M.D.; Saad, M.; Mubin, M. Asynchronous Particle Swarm Optimization-Genetic Algorithm (APSO-GA) based Selective Harmonic Elimination in a Cascaded H-Bridge Multilevel Inverter. IEEE Trans. Ind. Electron. 2021, 69, 1477–1487. [Google Scholar] [CrossRef]
- Peña-Delgado, A.F.; Peraza-Vázquez, H.; Almazán-Covarrubias, J.H.; Torres Cruz, N.; García-Vite, P.M.; Morales-Cepeda, A.B.; Ramirez-Arredondo, J.M. A Novel Bio-Inspired Algorithm Applied to Selective Harmonic Elimination in a Three-Phase Eleven-Level Inverter. Math. Probl. Eng. 2020, 2020, 8856040. [Google Scholar] [CrossRef]
- Xin, Y.; Yi, J.; Zhang, K.; Chen, C.; Xiong, J. Offline Selective Harmonic Elimination With (2N+1) Output Voltage Levels in Modular Multilevel Converter Using a Differential Harmony Search Algorithm. IEEE Access 2020, 8, 121596–121610. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N. Investigation of Bacterial Foraging Algorithm Applied for PV Parameter Estimation, Selective Harmonic Elimination in Inverters and Optimal Power Flow for Stability. In Nature-Inspired Methods for Metaheuristics Optimization: Algorithms and Applications in Science and Engineering; Bennis, F., Bhattacharjya, R.K., Eds.; Springer International Publishing: Cham, Switzerland, 2020; pp. 135–167. [Google Scholar] [CrossRef]
- Wolpert, D.H.; Macready, W.G. No free lunch theorems for optimization. IEEE Trans. Evol. Comput. 1997, 1, 67–82. [Google Scholar] [CrossRef] [Green Version]
- Ho, Y.C.; Pepyne, D.L. Simple Explanation of the No-Free-Lunch Theorem and Its Implications. J. Optim. Theory Appl. 2002, 115, 549–570. [Google Scholar] [CrossRef]
- Haghdar, K. Optimal DC Source Influence on Selective Harmonic Elimination in Multilevel Inverters Using Teaching—Learning Based Optimization. IEEE Trans. Ind. Electron. 2019, 67, 942–949. [Google Scholar] [CrossRef]
- Peraza-Vázquez, H.; Peña-Delgado, A.F.; Echavaria-Castillo, G.; Morales-Cepeda, A.B.; Velasco-Alvarez, J.; Ruiz-Perez, F. A Bio-Inspired Method for Engineering Design Optimization Inspired by Dingoes Hunting Strategies. Math. Probl. Eng. 2021, 2021, 9107547. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithm | Angles | THD | Fitness | ||||
|---|---|---|---|---|---|---|---|
| mDOA | 7.84 | 19.37 | 29.63 | 47.66 | 62.90 | 5.01 | 1.22 × 10 |
| BWOA | 7.86 | 19.37 | 29.65 | 47.68 | 63.21 | 5.01 | 1.29 × 10 |
| GWOA | 0.49 | 14.74 | 25.61 | 40.57 | 89.16 | 5.71 | 16.04 × 10 |
| WOA | 4.19 | 20.29 | 22.12 | 41.97 | 61.15 | 6.90 | 3.93 × 10 |
| Algorithm | Angles | THD | Fitness | ||||
|---|---|---|---|---|---|---|---|
| mDOA | 9.71 | 33.42 | 43.28 | 61.16 | 83.59 | 5.62 | 3.01 × 10 |
| BWOA | 9.70 | 33.43 | 43.30 | 61.18 | 83.60 | 5.63 | 3.05 × 10 |
| GWOA | 10.32 | 31.83 | 44.74 | 62.23 | 85.65 | 6.73 | 3.37 × 10 |
| WOA | 33.27 | 44.50 | 52.91 | 64.49 | 76.64 | 5.56 | 3.93 × 10 |
| Algorithm | Angles | THD | Fitness | ||||
|---|---|---|---|---|---|---|---|
| mDOA | 35.42 | 46.94 | 58.57 | 72.67 | 87.85 | 6.79 | 4.15 × 10 |
| BWOA | 35.44 | 46.95 | 58.58 | 72.61 | 87.86 | 6.82 | 4.19 × 10 |
| GWOA | 35.29 | 46.80 | 58.45 | 72.46 | 87.74 | 6.87 | 2.78 × 10 |
| WOA | 35.35 | 46.89 | 58.49 | 72.44 | 87.70 | 6.87 | 8.17 × 10 |
| Modulation Index | BWOA | WOA | GWOA |
|---|---|---|---|
| 0.5 | 0.023841866 | 0.334842127 | 0.994383367 |
| 0.525 | 0.202618429 | 0.688240195 | 0.363836258 |
| 0.55 | 0.013480336 | 0.402207261 | 0.805389527 |
| 0.575 | 0.893601743 | 0.568549239 | 0.805389527 |
| 0.6 | 0.838240614 | 0.320922266 | 0.418205544 |
| 0.625 | 0.915906103 | 0.228686857 | 0.08715687 |
| 0.65 | 0.677905357 | 0.035311051 | 0.007632168 |
| 0.675 | 0.70908377 | 0.010609836 | 0.00027332 |
| 0.7 | 0.046355344 | 2.63975 × 10 | 2.98839 × 10 |
| 0.725 | 0.116466135 | 2.12542 × 10 | 1.97051 × 10 |
| 0.75 | 0.587796526 | 0.006175451 | 0.002648716 |
| 0.775 | 0.442907971 | 0.008647429 | 0.002096522 |
| 0.8 | 0.251208826 | 0.006725085 | 0.000673813 |
| 0.825 | 0.617218971 | 0.084591112 | 0.010609836 |
| 0.85 | 0.783673018 | 0.103929294 | 0.010188301 |
| 0.875 | 0.174273548 | 0.007958048 | 0.001428464 |
| 0.9 | 0.927085867 | 0.039156639 | 0.049531746 |
| 0.925 | 0.418211405 | 0.00455584 | 0.27522748 |
| 0.95 | 0.161263208 | 0.000547578 | 0.126625679 |
| 0.975 | 0.257065744 | 0.133768379 | 0.169847032 |
| 1 | 0.023843633 | 0.022149345 | 0.000321759 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almazán-Covarrubias, J.H.; Peraza-Vázquez, H.; Peña-Delgado, A.F.; García-Vite, P.M. An Improved Dingo Optimization Algorithm Applied to SHE-PWM Modulation Strategy. Appl. Sci. 2022, 12, 992. https://doi.org/10.3390/app12030992
Almazán-Covarrubias JH, Peraza-Vázquez H, Peña-Delgado AF, García-Vite PM. An Improved Dingo Optimization Algorithm Applied to SHE-PWM Modulation Strategy. Applied Sciences. 2022; 12(3):992. https://doi.org/10.3390/app12030992
Chicago/Turabian StyleAlmazán-Covarrubias, Juan H., Hernán Peraza-Vázquez, Adrián F. Peña-Delgado, and Pedro Martín García-Vite. 2022. "An Improved Dingo Optimization Algorithm Applied to SHE-PWM Modulation Strategy" Applied Sciences 12, no. 3: 992. https://doi.org/10.3390/app12030992
APA StyleAlmazán-Covarrubias, J. H., Peraza-Vázquez, H., Peña-Delgado, A. F., & García-Vite, P. M. (2022). An Improved Dingo Optimization Algorithm Applied to SHE-PWM Modulation Strategy. Applied Sciences, 12(3), 992. https://doi.org/10.3390/app12030992