
Growing Neural Gas with Different Topologies for 3D Space Perception


Abstract
:1. Introduction
- 1.
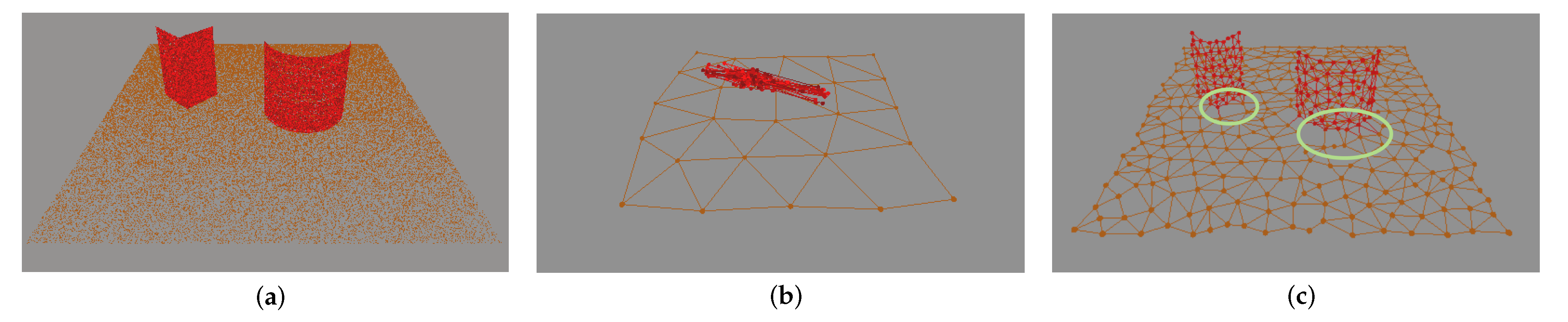
- GNG-DT can preserve 2D/3D position spaces with additional feature information from the point cloud by using the distance measurement of only the position information.
- 2.
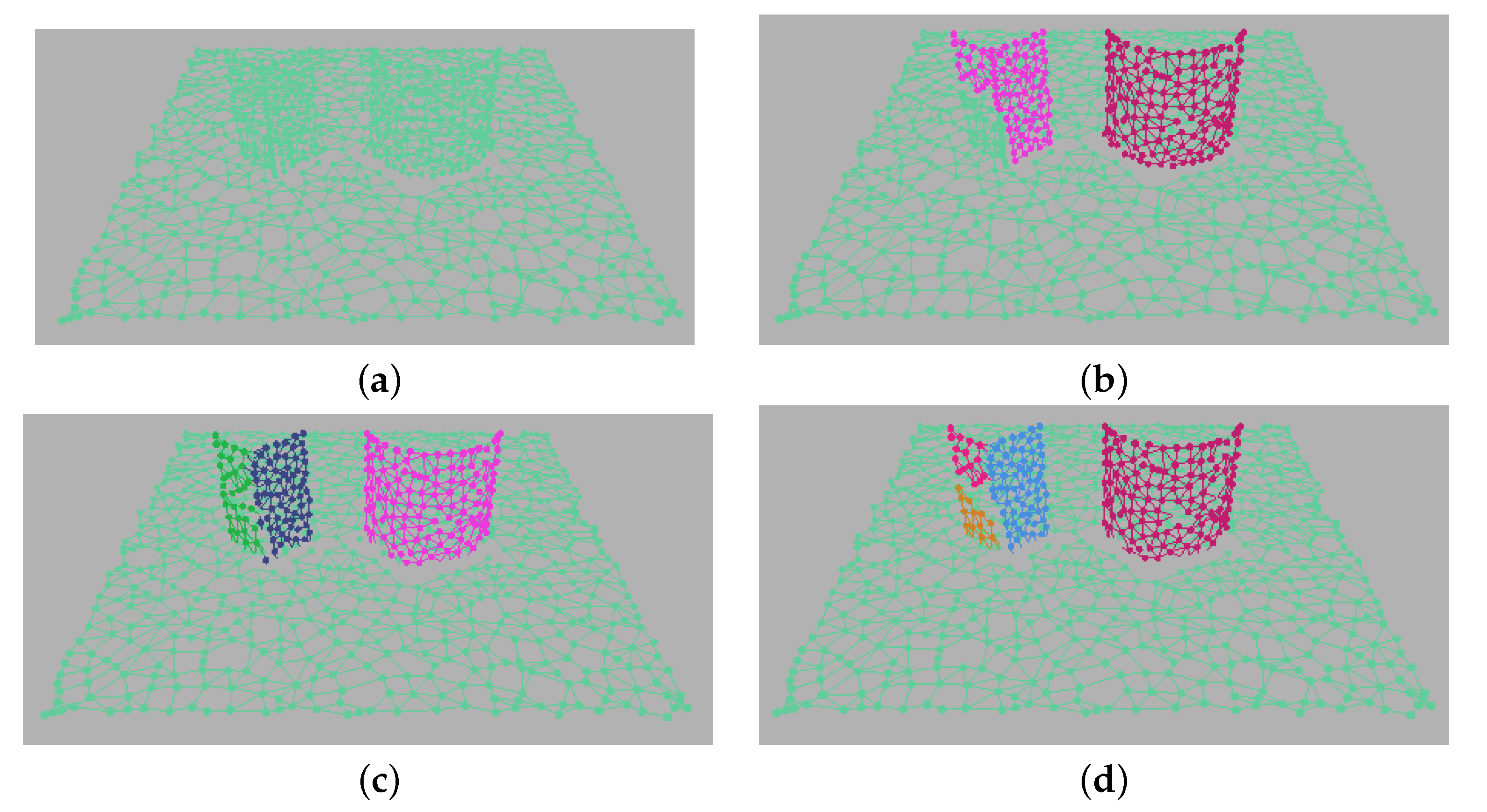
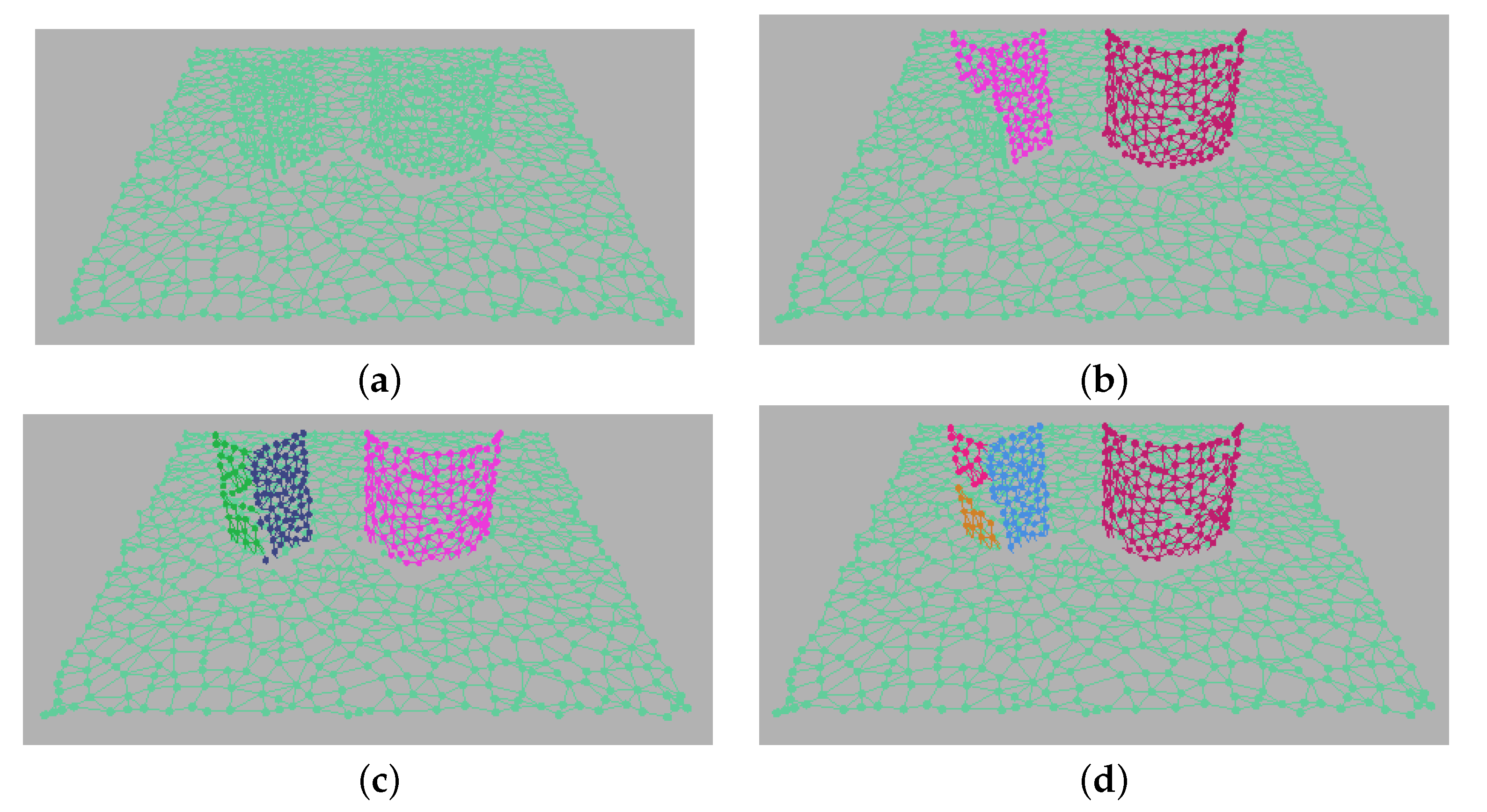
- GNG-DT can give multiple clustering results by utilizing multiple topologies within the framework of online learning.
- 3.
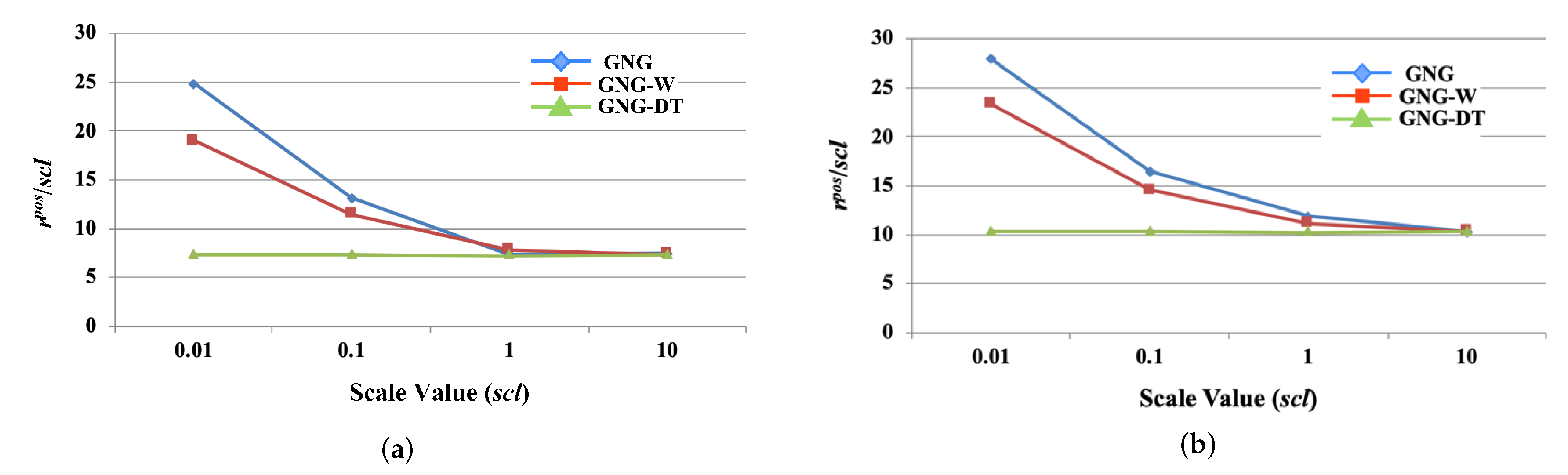
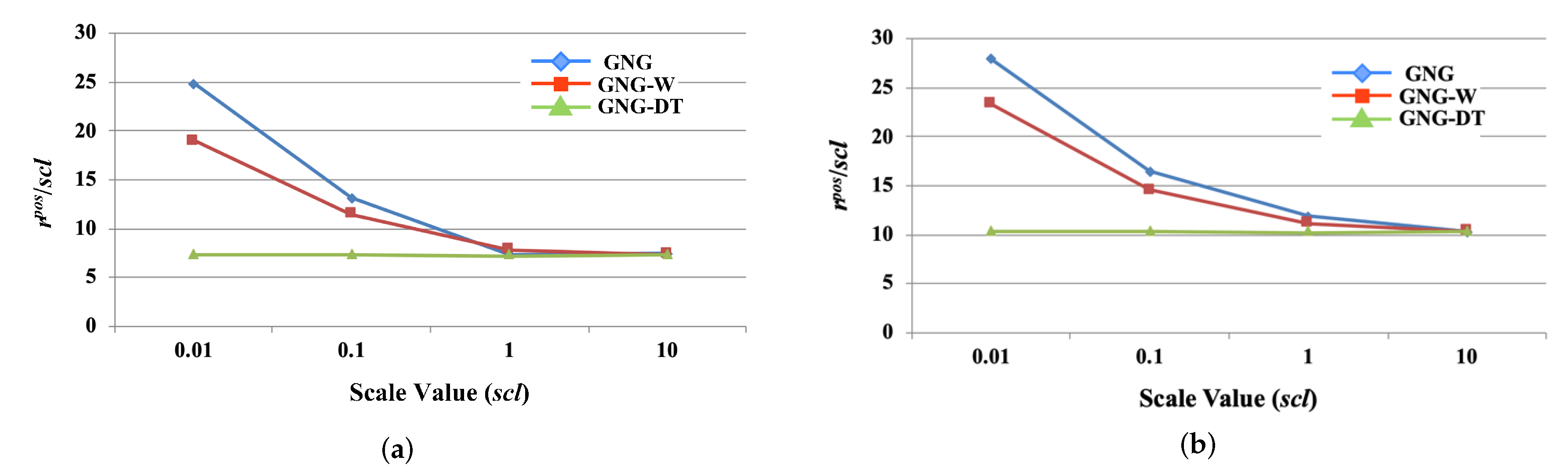
- GNG-DT is a robust learning algorithm for scale variance of the input vector composed of point cloud with additional properties.
2. Growing Neural Gas with Different Topologies
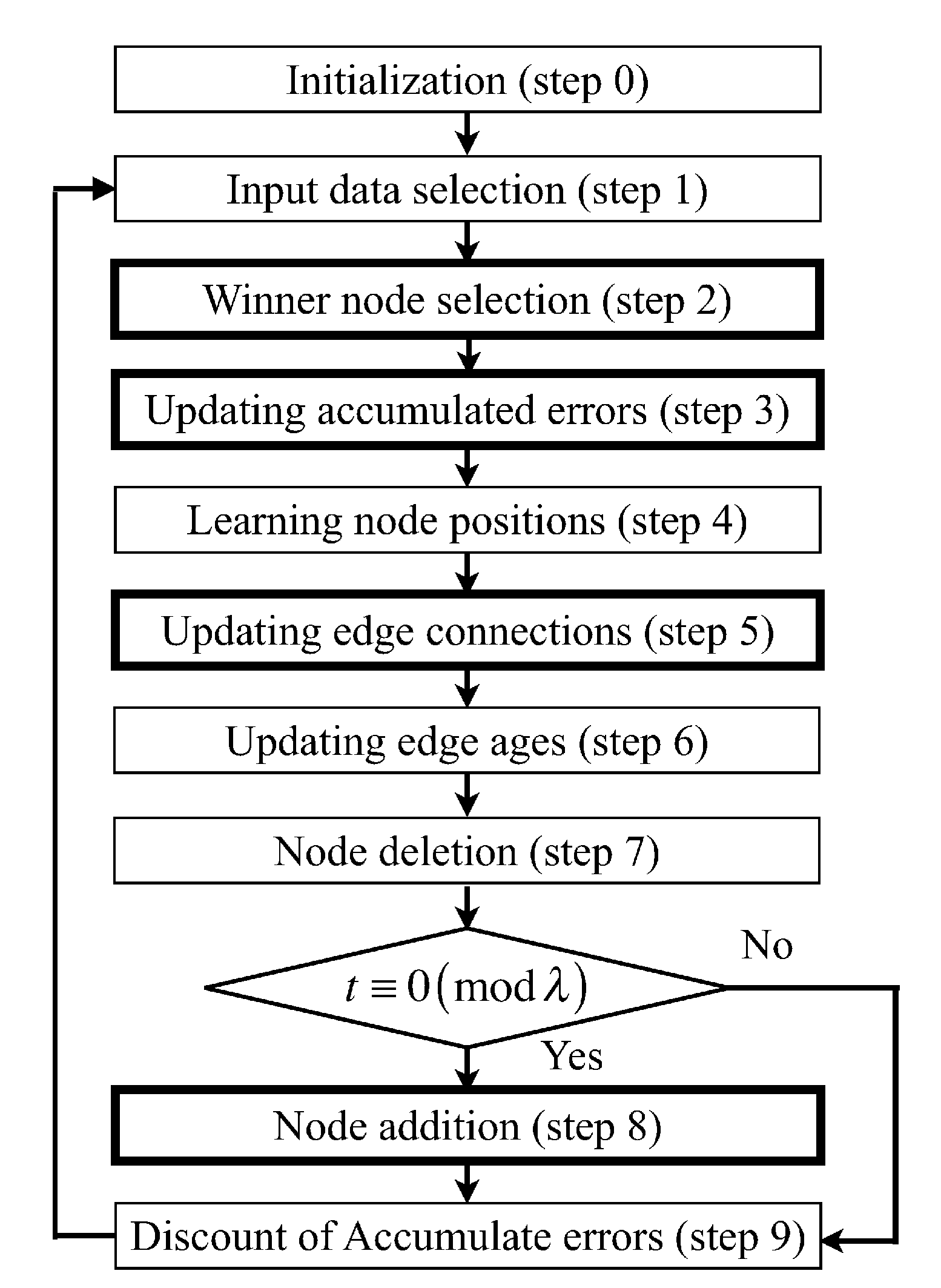
2.1. Overview of Algorithm
- Step 0. Generate two nodes at random positions, and in , where n is the dimension of the reference vector. Initialize the connection set = 1 (), and the age of edge is set to 0.
- Step 1. Generate at random an input data .
- Step 2. Select the 1st winner node and the 2nd winner node from the set of nodes bywhere A indicates the set of the node numbers.
- Step 3. Add the squared distance between the input data and the 1st winner to an accumulated error variable :
- Step 4. Set the age of the connection between and at 0 ( = 0). If a connection of the position information between and does not yet exist, create the connection (). In addition, the edge of the other property o() is calculated as the following equation:where is the predefined threshold value of the oth property.
- Step 5. Update the nodes of the winner and its direct topological neighbors by the learning rates and ().
- Step 6. Increment the age of all edges emanating from .
- Step 7. Delete edges of all properties with an age larger than . If this results in nodes having no more connecting edges ( = 0) of the position information, remove those nodes as well.
- Step 8. If the number of input data generated so far is an integer multiple of a parameter , insert a new node as follows.
- Select the node u with the maximal accumulated error.
- Select the node f with the maximal accumulated error among the neighbors of u.
- Add a new node r to the network and interpolate its node form u and f.
- Delete the original edges of all properties between u and f. Next, insert edges of the position property connecting the new node r with nodes u and f ( = 1, = 1). The edges of the oth property () are calculated as the following equation:
- Decrease the error variables of u and f by a temporal discounting rate ().
- Interpolate the error variable of r from u and f.
- Step 9. Decrease the error variables of all nodes by a temporal discounting rate ().
- Step 10. Continue with step 1 if a stopping criterion (e.g., the number of nodes or some performance measure) is not yet fulfilled.
2.2. Distance Measurement
2.3. Clustering from Multiple Topologies
2.4. Learning Rule
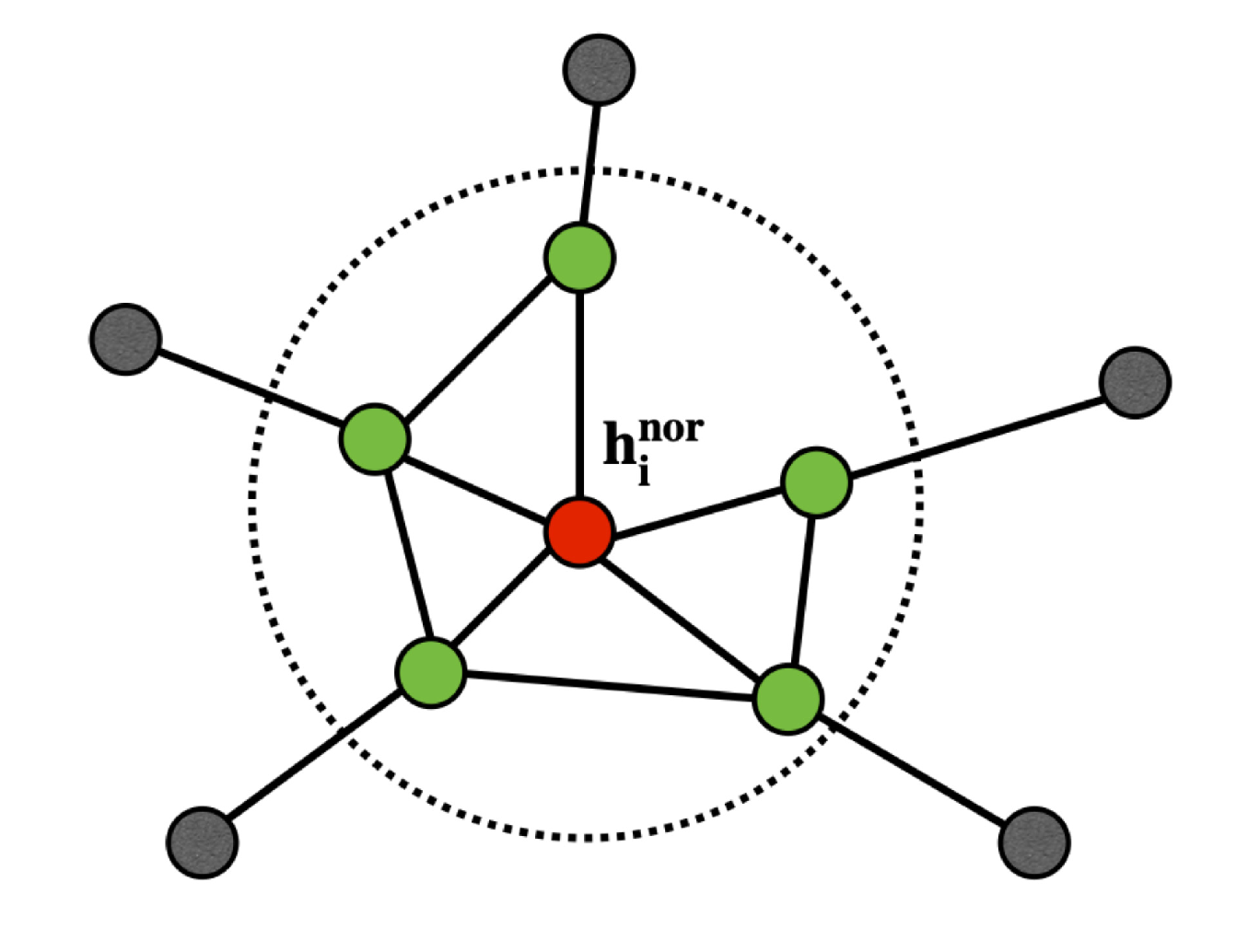
2.5. Feature Extraction from the Topological Structure
3. Experimental Results
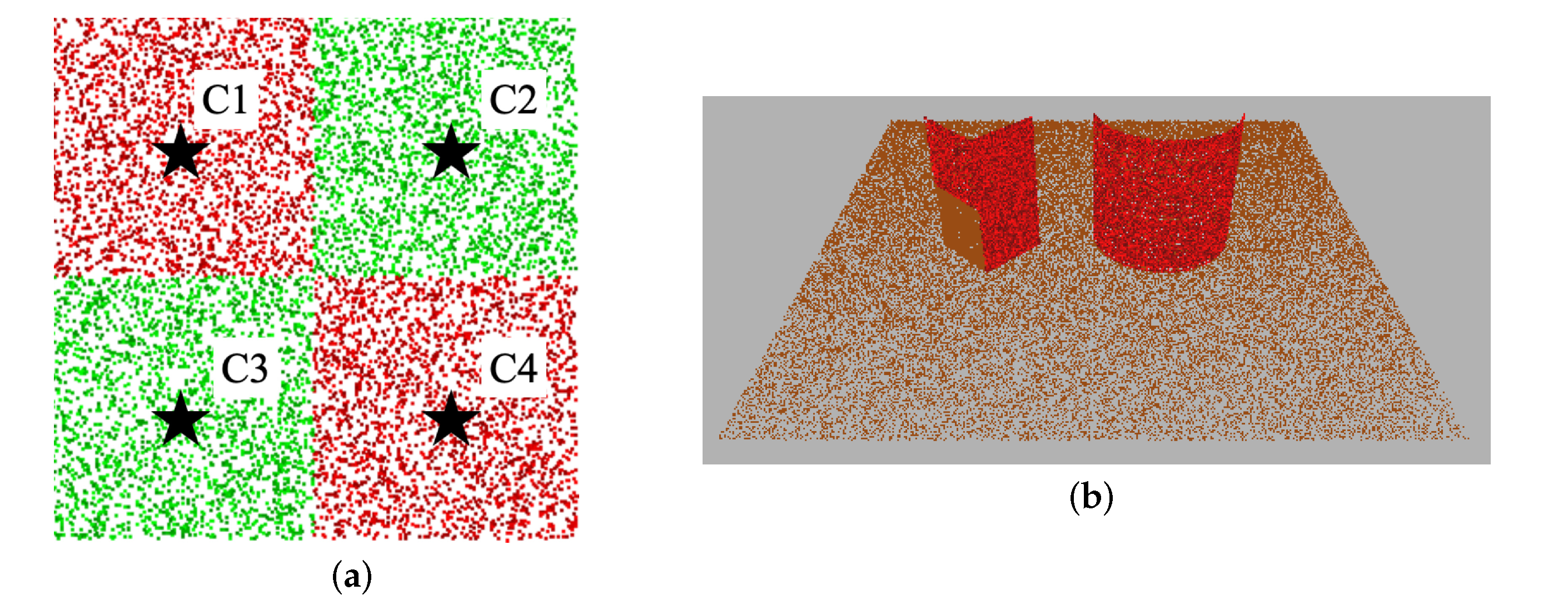
3.1. Simulation Data
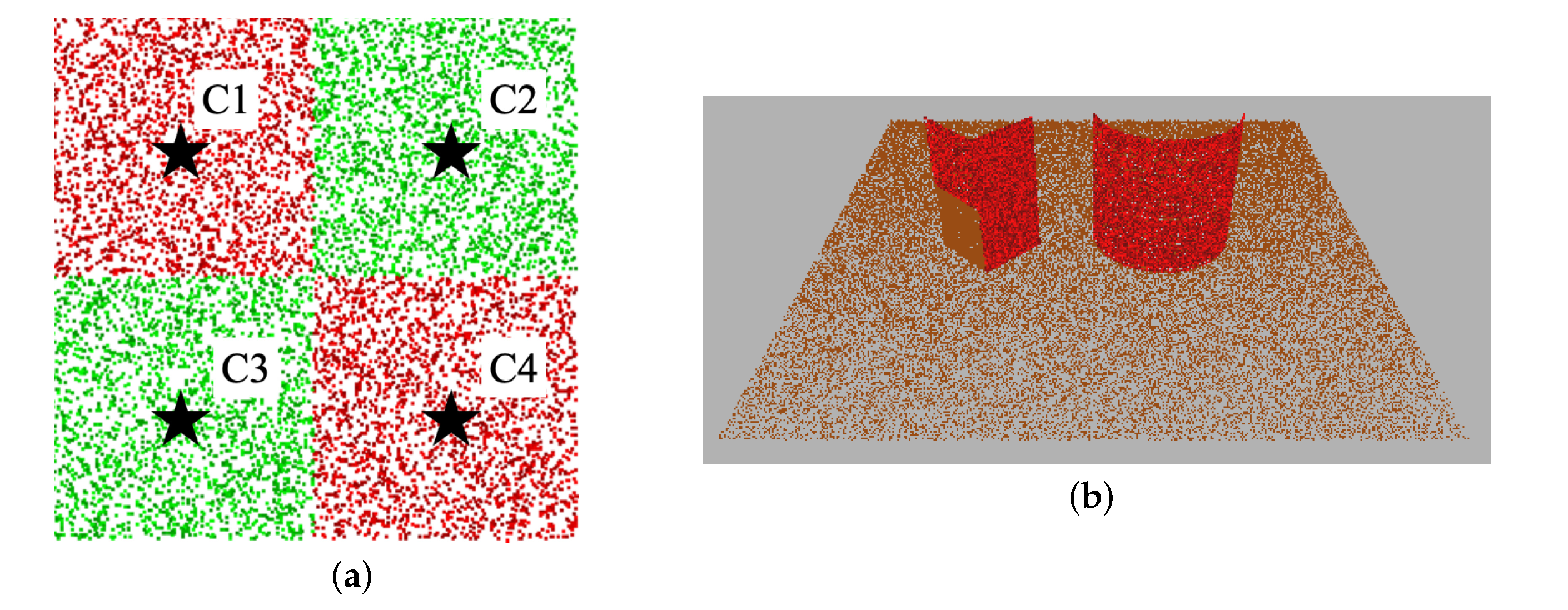
3.1.1. Experimental Setup
3.1.2. Quantitative Evaluation
- (1)
- Quantization error
- (2)
- Error of the position information between the center of cluster and true value
3.2. RGB-D Data
3.2.1. Experimental Setup
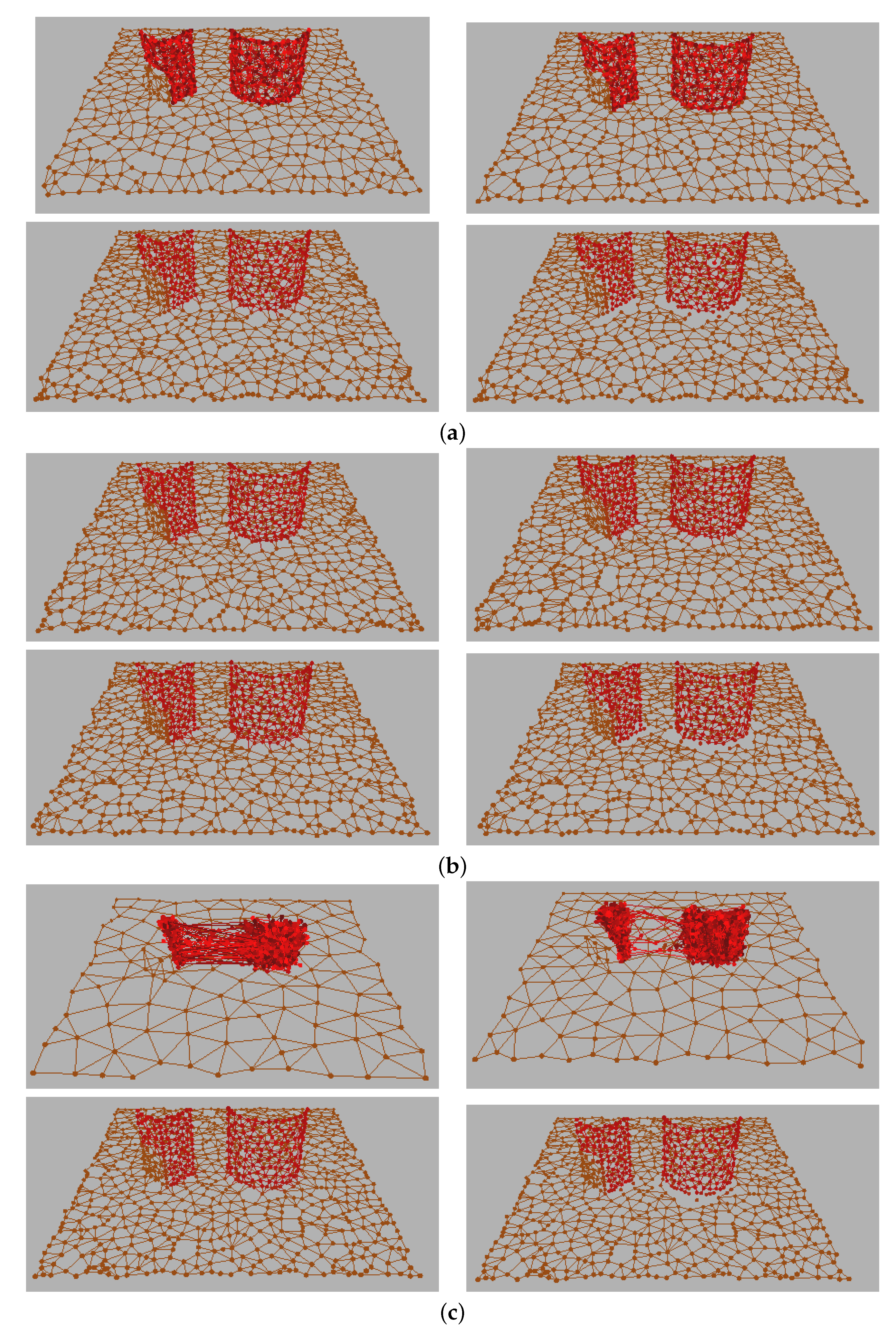
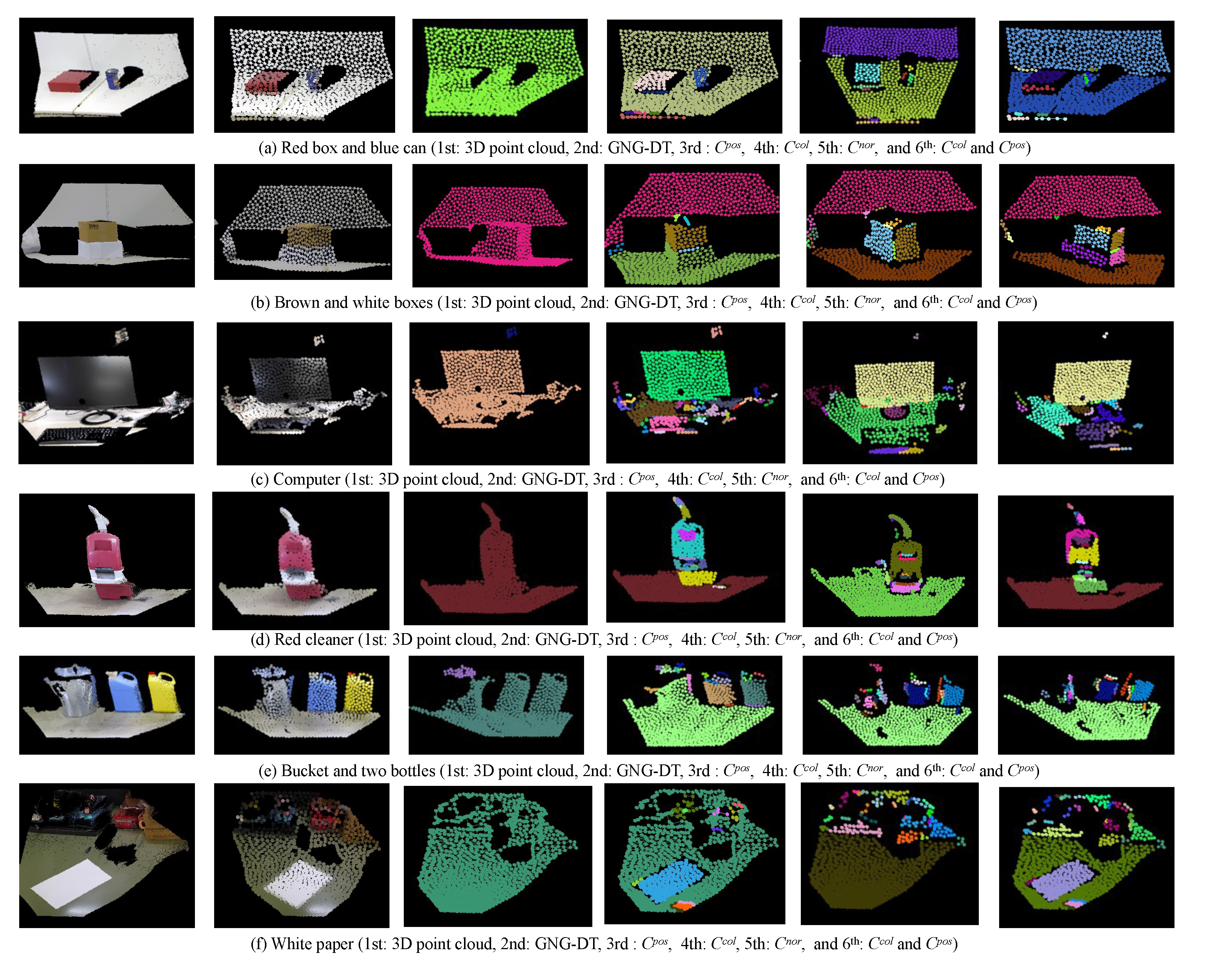
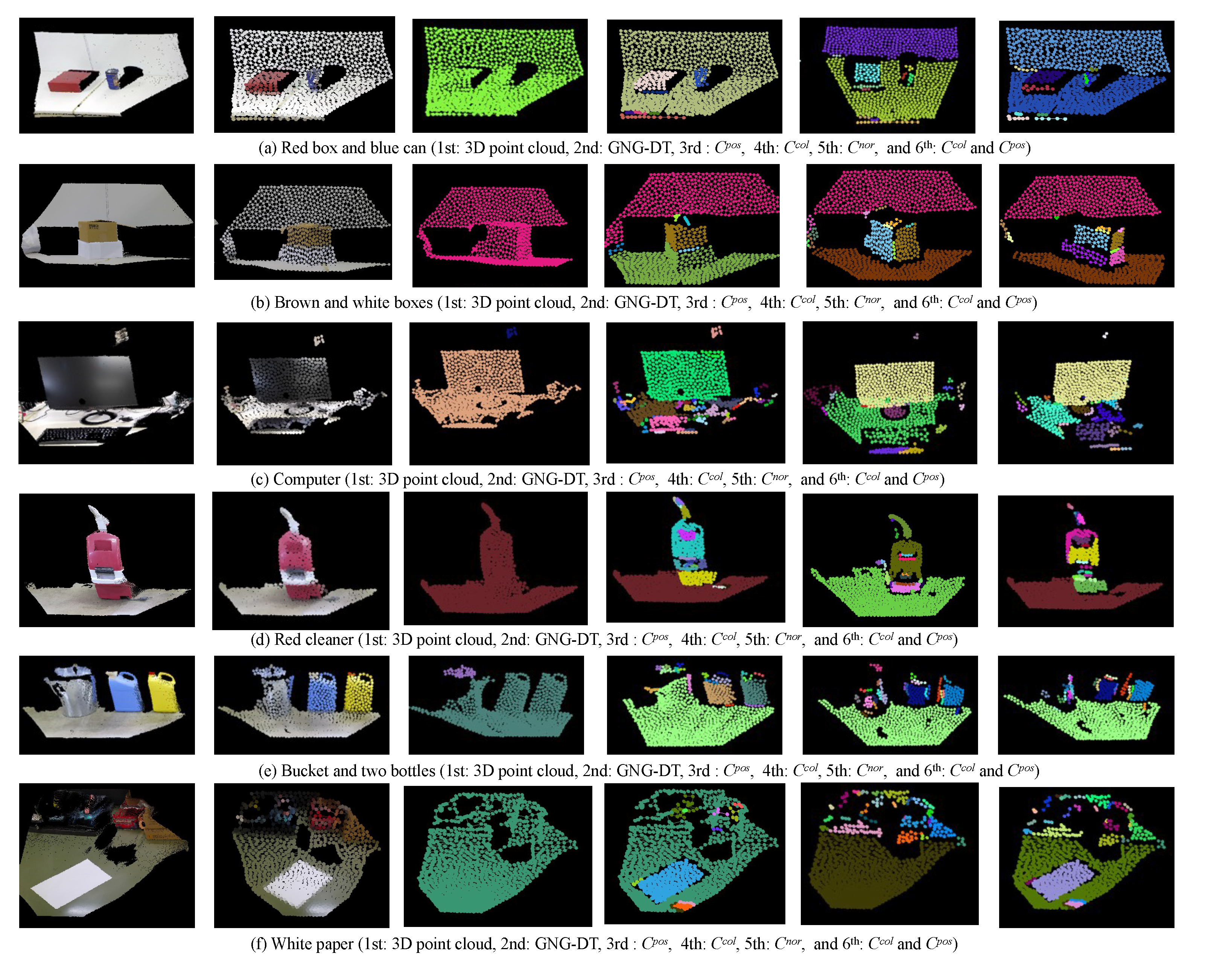
3.2.2. Experimental Result
3.3. RGB-D Data
3.3.1. Experimental Setup
3.3.2. Experimental Result
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhang, H.; Reardon, C.; Parker, L.E. Real-time multiple human perception with color-depth cameras on a mobile robot. IEEE Trans. Cybern. 2013, 43, 1429–1441. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Liu, M. Robotic Online Path Planning on Point Cloud. IEEE Trans. Cybern. 2016, 46, 1217–1228. [Google Scholar] [CrossRef]
- Cong, Y.; Tian, D.; Feng, Y.; Fan, B.; Yu, H. Speedup 3-D Texture-Less Object Recognition Against Self-Occlusion for Intelligent Manufacturing. IEEE Trans. Cybern. 2019, 49, 3887–3897. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Shen, L.; Fang, R.; Yao, Y.; Geng, X.; Wu, D. No-Reference Stereoscopic Image Quality Assessment Based on Image Distortion and Stereo Perceptual Information. IEEE Trans. Emerg. Top. Comput. Intell. 2019, 3, 59–72. [Google Scholar] [CrossRef]
- Song, E.; Yoon, S.W.; Son, H.; Yu, S. Foot Measurement Using 3D Scanning Model. Int. J. Fuzzy Log. Intell. Syst. 2018, 18, 167–174. [Google Scholar] [CrossRef] [Green Version]
- Jeong, I.; Ko, W.; Park, G.; Kim, D.; Yoo, Y.; Kim, J. Task Intelligence of Robots: Neural Model-Based Mechanism of Thought and Online Motion Planning. IEEE Trans. Emerg. Top. Comput. Intell. 2017, 1, 41–50. [Google Scholar] [CrossRef]
- Wibowo, S.A.; Kim, S. Three-Dimensional Face Point Cloud Smoothing Based on Modified Anisotropic Diffusion Method. Int. J. Fuzzy Log. Intell. Syst. 2014, 14, 84–90. [Google Scholar] [CrossRef]
- Izadi, S.; Kim, D.; Hilliges, O.; Molyneaux, D.; Newcombe, R.; Kohli, P.; Shotton, J.; Hodges, S.; Freeman, D.; Davison, A.; et al. KinectFusion: Real-time 3D reconstruction and interaction using a moving depth camera. In Proceedings of the 24th Annual ACM Symposium on User Interface Software and Technology, Santa Barbara, CA, USA, 16–19 October 2011. [Google Scholar]
- Keselman, L.; Woodfill, J.I.; Grunnet-Jepsen, A.; Bhowmik, A. Intel realsense stereoscopic depth cameras. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 1–10. [Google Scholar]
- Han, X.F.; Jin, J.S.; Wang, M.J.; Jiang, W.; Gao, L.; Xiao, L. A review of algorithms for filtering the 3D point cloud. Signal Process. Image Commun. 2017, 57, 103–112. [Google Scholar] [CrossRef]
- Pauly, M.; Gross, M.; Kobbelt, L.P. Efficient simplification of point-sampled surfaces. In Proceedings of the Conference on Visualization’02, Boston, MA, USA, 28–29 October 2002; pp. 163–170. [Google Scholar]
- Prakhya, S.M.; Liu, B.; Lin, W. B-SHOT: A binary feature descriptor for fast and efficient keypoint matching on 3D point clouds. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 1929–1934. [Google Scholar]
- Jin, Y.H.; Lee, W.H. Fast cylinder shape matching using random sample consensus in large scale point cloud. Appl. Sci. 2019, 9, 974. [Google Scholar] [CrossRef] [Green Version]
- Guo, Y.; Wang, H.; Hu, Q.; Liu, H.; Liu, L.; Bennamoun, M. Deep Learning for 3D Point Clouds: A Survey. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 4338–4364. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 652–660. [Google Scholar]
- Li, Y.; Bu, R.; Sun, M.; Wu, W.; Di, X.; Chen, B. PointCNN: Convolution on x-transformed points. Adv. Neural Inf. Process. Syst. 2018, 31, 820–830. [Google Scholar]
- Maturana, D.; Scherer, S. VoxNet: A 3D Convolutional Neural Network for real-time object recognition. In Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 28 September–3 October 2015; pp. 922–928. [Google Scholar]
- Kohonen, T. Self-Organizing Maps; Springer: Berlin/Heidelberg, Germany, 2000. [Google Scholar]
- Li, J.; Chen, B.M.; Lee, G.H. SO-Net: Self-organizing network for point cloud analysis. In Proceedings of the Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 9397–9406. [Google Scholar]
- Martinetz, T.M.; Schulten, K.J. A “neural-gas” network learns topologies. Artif. Neural Netw. 1991, 1, 397–402. [Google Scholar]
- Fritzke, B. Unsupervised clustering with growing cell structures. Neural Netw. 1991, 2, 531–536. [Google Scholar]
- Fritzke, B. A growing neural gas network learns topologies. Adv. Neural Inf. Process. Syst. 1995, 7, 625–632. [Google Scholar]
- Garcia-Rodriguez, J.; Cazorla, M.; Orts-Escolano, S.; Morell, V. Improving 3D Keypoint Detection from Noisy Data Using Growing Neural Gas. In Advances in Computational Intelligence. IWANN 2013. Lecture Notes in Computer Science; Rojas, I., Joya, G., Cabestany, J., Eds.; Springer: Tenerife, Spain, 2013; Volume 7903. [Google Scholar]
- Orts-Escolano, S.; García-Rodríguez, J.; Morell, V.; Cazorla, M.; Perez, J.A.S.; Garcia-Garcia, A. 3D Surface Reconstruction of Noisy Point Clouds Using Growing Neural Gas: 3D Object/Scene Reconstruction. Neural Process. Lett. 2016, 43, 401–423. [Google Scholar] [CrossRef] [Green Version]
- Satomi, M.; Masuta, H.; Kubota, N. Hierarchical growing neural gas for information structured space. In Proceedings of the 2009 IEEE Workshop on Robotic Intelligence in Informationally Structured Space, Nashville, TN, USA, 30 March–2 April 2009; pp. 54–59. [Google Scholar]
- Kubota, N.; Narita, T.; Lee, B.H. 3D Topological Reconstruction based on Hough Transform and Growing NeuralGas for Informationally Structured Space. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 3459–3464. [Google Scholar]
- Orts-Escolano, S.; Garcia-Rodriguez, J.; Serra-Perez, J.A.; Jimeno-Morenilla, A.; Garcia-Garcia, A.; Morell, V.; Cazorla, M. 3D model reconstruction using neural gas accelerated on GPU. Appl. Soft Comput. 2015, 32, 87–100. [Google Scholar] [CrossRef] [Green Version]
- Holdstein, Y.; Fischer, A. Three-dimensional surface reconstruction using meshing growing neural gas (MGNG). Vis. Comput. 2008, 24, 295–302. [Google Scholar] [CrossRef]
- Saval-Calvo, M.; Azorin-Lopez, J.; Fuster-Guillo, A.; Garcia-Rodriguez, J.; Orts-Escolano, S.; Garcia-Garcia, A. Evaluation of sampling method effects in 3D non-rigid registration. Neural Comput. Appl. 2017, 28, 953–967. [Google Scholar] [CrossRef] [Green Version]
- Saputra, A.A.; Takesue, N.; Wada, K.; Ijspeert, A.J.; Kubota, N. AQuRo: A Cat-like Adaptive Quadruped Robot with Novel Bio-Inspired Capabilities. Front. Robot. 2021, 8, 35. [Google Scholar] [CrossRef]
- Saputra, A.A.; Chin, W.H.; Toda, Y.; Takesue, N.; Kubota, N. Dynamic Density Topological Structure Generation for Real-Time Ladder Affordance Detection. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 4–8 November 2019; pp. 3439–3444. [Google Scholar]
- Alwaely, B.; Abhayaratne, C. Adaptive Graph Formulation for 3D Shape Representation. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; pp. 1947–1951. [Google Scholar]
- Rangel, J.C.; Morell, V.; Cazorla, M.; Orts-Escolano, S.; García-Rodríguez, J. Object recognition in noisy RGB-D data using GNG. Pattern Anal. Appl. 2017, 20, 1061–1076. [Google Scholar] [CrossRef] [Green Version]
- Rangel, J.C.; Morell, V.; Cazorla, M.; Orts-Escolano, S.; García-Rodríguez, J. Using GNG on 3D Object Recognition in Noisy RGB-D data. In Proceedings of the 2015 International Joint Conference on Neural Networks (IJCNN), Killarney, Ireland, 12–16 July 2015; pp. 1–7. [Google Scholar]
- Parisi, G.I.; Weber, C.; Wermter, S. Human Action Recognition with Hierarchical Growing Neural Gas Learning. In Artificial Neural Networks and Machine Learning—ICANN 2014, Lecture Notes in Computer Science; Springer: Berlin/Heidelberg, Germany, 2014; Volume 8681. [Google Scholar]
- Mirehi, N.; Tahmasbi, M.; Targhi, A.T. Hand gesture recognition using topological features. Multimed Tools Appl. 2019, 78, 13361–13386. [Google Scholar] [CrossRef]
- Yanik, P.M.; Manganelli, J.; Merino, J.; Threatt, A.L.; Brooks, J.O.; Green, K.E.; Walker, I.D. Use of kinect depth data and Growing Neural Gas for gesture based robot control. In Proceedings of the 2012 6th International Conference on Pervasive Computing Technologies for Healthcare (PervasiveHealth) and Workshops, San Diego, CA, USA, 21–24 May 2012; pp. 283–290. [Google Scholar]
- do Rego, R.L.M.E.; Araujo, A.F.R.; de Lima Neto, F.B. Growing Self-Organizing Maps for Surface Reconstruction from Unstructured Point Clouds. In Proceedings of the 2007 International Joint Conference on Neural Networks, Orlando, FL, USA, 12–17 August 2007; pp. 1900–1905. [Google Scholar]
- Toda, Y.; Matsuno, T.; Minami, M. Multilayer Batch Learning Growing Neural Gas for Learning Multiscale Topologies. J. Adv. Comput. Intell. Intell. Inform. 2021, 25, 1011–1023. [Google Scholar] [CrossRef]
- Viejo, D.; Garcia-Rodriguez, J.; Cazorla, M. Combining visual features and growing neural gas networks for robotic 3D SLAM. Inf. Sci. 2014, 276, 174–185. [Google Scholar] [CrossRef] [Green Version]
- Orts-Escolano, S.; García-Rodríguez, J.; Cazorla, M.; Morell, V.; Azorin, J.; Saval, M.; Garcia-Garcia, A.; Villena, V. Bioinspired point cloud representation: 3D object tracking. Neural Comput. Applic 2018, 29, 663–672. [Google Scholar] [CrossRef]
- Fiser, D.; Faigl, J.; Kulich, M. Growing neural gas efficiently. Neurocomputing 2013, 104, 72–82. [Google Scholar] [CrossRef]
- Angelopoulou, A.; García-Rodríguez, J.; Orts-Escolano, S.; Gupta, G.; Psarrou, A. Fast 2D/3D object representation with growing neural gas. Neural Comput. Appl. 2018, 29, 903–919. [Google Scholar] [CrossRef] [Green Version]
- Frezza-Buet, H. Online computing of non-stationary distributions velocity fields by an accuracy controlled growing neural gas. Neural Netw. 2014, 60, 203–221. [Google Scholar] [CrossRef]
- Angelopoulou, A.; García-Rodríguez, J.; Orts-Escolano, S.; Kapetanios, E.; Liang, X.; Woll, B.; Psarrou, A. Evaluation of different chrominance models in the detection and reconstruction of faces and hands using the growing neural gas network. Pattern Anal. Appl. 2019, 22, 1667–1685. [Google Scholar] [CrossRef] [Green Version]
- Molina-Cabello, M.A.; López-Rubio, E.; Luque-Baena, R.M.; Dom’inguez, E.; Thurnhofer-Hemsi, K. Neural controller for PTZ cameras based on nonpanoramic foreground detection. In Proceedings of the 2017 International Joint Conference on Neural Networks (IJCNN), Anchorage, Alaska, 14–19 May 2017; pp. 404–411. [Google Scholar]
- Tünnermann, J.; Born, C.; Mertsching, B. Saliency From Growing Neural Gas: Learning Pre-Attentional Structures for a Flexible Attention System. IEEE Trans. Image Process. 2019, 28, 5296–5307. [Google Scholar] [CrossRef]
- Toda, Y.; Yu, H.; Ju, Z.; Takesue, N.; Wada, K.; Kubota, N. Real-time 3D Point Cloud Segmentation using Growing Neural Gas with Utility. In Proceedings of the 9th International Conference on Human System Interaction, Portsmouth, UK, 6–8 July 2016; pp. 418–422. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 500 | |
| 0.025 | |
| 0.0003 | |
| 88 | |
| 0.5 | |
| 0.0005 | |
| 10.0 | |
| 0.02 |
| Data1 | GNG | GNG-W | GNG-DT |
|---|---|---|---|
| = 1.0 | 8.687 ± 0.062 | 7.794 ± 0.037 | |
| = 10.0 | 73.948 ± 0.191 | 73.581 ± 0.217 | |
| = 0.1 | 1.311 ± 0.020 | 1.144 ± 0.015 | |
| = 0.01 | 0.248 ± 0.009 | 0.190 ± 0.003 | |
| Data2 | GNG | GNG-W | GNG-DT |
| = 1.0 | 11.825 ± 0.047 | 11.133 ± 0.038 | |
| = 10.0 | 103.224 ± 0.293 | 103.418±0.322 | |
| = 0.1 | 1.644 ± 0.010 | 1.456 ± 0.008 | |
| = 0.01 | 0.279 ± 0.003 | 0.234 ± 0.002 |
| Data1 | GNG | GNG-W | GNG-DT |
|---|---|---|---|
| = 1.0 | 25.152 ± 0.499 | 26.178 ± 0.425 | |
| = 10.0 | 23.081 ± 0.623 | 26.168 ± 0.509 | |
| = 0.1 | 28.619 ± 0.682 | 27.623 ± 0.650 | |
| = 0.01 | 33.693 ± 1.891 | 30.425 ± 1.005 | |
| Data2 | GNG | GNG-W | GNG-DT |
| = 1.0 | 46.740 ± 0.290 | 45.396 ± 0.233 | |
| = 10.0 | 34.099 ± 0.055 | 33.933 ± 0.028 | |
| = 0.1 | 48.084 ± 0.496 | 47.841 ± 0.419 | |
| = 0.01 | 49.462 ± 1.301 | 48.056 ± 0.766 |
| Cluster No. | Cluster Error () | Cluster No. | Cluster Error () |
|---|---|---|---|
| C1 ( = 1.0) | 5.691 ± 1.520 | C2 ( = 1.0) | 5.691 ± 1.809 |
| C1 ( = 10.0) | 57.654 ± 15.035 | C2 ( = 10.0) | 57.562 ± 14.653 |
| C1 ( = 0.1) | 0.541 ± 0.152 | C2 ( = 10.0) | 57.562 ± 14.653 |
| C1 ( = 0.01) | 0.058 ± 0.019 | C2 ( = 0.01) | 0.053 ± 0.014 |
| C3 ( = 1.0) | 5.518 ± 1.759 | C4 ( = 1.0) | 5.830 ± 1.700 |
| C3 ( = 10.0) | 56.296 ± 19.622 | C4 ( = 10.0) | 57.493 ± 16.728 |
| C3 ( = 0.1) | 0.601 ± 0.191 | C4 ( = 0.1) | 0.564 ± 0.165 |
| C3 ( = 0.01) | 0.055 ± 0.016 | C4 ( = 0.01) | 0.056 ± 0.016 |
| GNG | GNG-W | GNG-DT | |
|---|---|---|---|
| Figure 12a | 12.796 ± 0.0011 | 12.341 ± 0.0018 | |
| Figure 12b | 12.754 ± 0.191 | 12.914 ± 0.015 | |
| Figure 12c | 11.428 ± 0.001 | 10.857 ± 0.001 | |
| Figure 12d | 8.908 ± 0.090 | 8.526 ± 0.088 | |
| Figure 12e | 10.151 ± 0.016 | 9.849 ± 0.023 | |
| Figure 12f | 9.492 ± 0.0006 | 9.200 ± 0.0008 |
| GNG | GNG-W | GNG-DT | |
|---|---|---|---|
| Figure 12a | 33.719 ± 0.715 | 30.544 ± 0.650 | |
| Figure 12b | 14.967 ± 0.076 | 15.392± 0.047 | |
| Figure 12c | 61.171 ± 0.555 | 57.318 ± 0.343 | |
| Figure 12d | 27.484 ± 0.322 | 26.320± 0.353 | |
| Figure 12e | 18.925 ± 0.070 | 18.642± 0.076 | |
| Figure 12f | 24.535 ± 0.355 | 28.281± 0.268 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Toda, Y.; Wada, A.; Miyase, H.; Ozasa, K.; Matsuno, T.; Minami, M. Growing Neural Gas with Different Topologies for 3D Space Perception. Appl. Sci. 2022, 12, 1705. https://doi.org/10.3390/app12031705
Toda Y, Wada A, Miyase H, Ozasa K, Matsuno T, Minami M. Growing Neural Gas with Different Topologies for 3D Space Perception. Applied Sciences. 2022; 12(3):1705. https://doi.org/10.3390/app12031705
Chicago/Turabian StyleToda, Yuichiro, Akimasa Wada, Hikari Miyase, Koki Ozasa, Takayuki Matsuno, and Mamoru Minami. 2022. "Growing Neural Gas with Different Topologies for 3D Space Perception" Applied Sciences 12, no. 3: 1705. https://doi.org/10.3390/app12031705
APA StyleToda, Y., Wada, A., Miyase, H., Ozasa, K., Matsuno, T., & Minami, M. (2022). Growing Neural Gas with Different Topologies for 3D Space Perception. Applied Sciences, 12(3), 1705. https://doi.org/10.3390/app12031705