
Dynamic Discrete Inventory Control Model with Deterministic and Stochastic Demand in Pharmaceutical Distribution


Abstract
:1. Introduction
2. An Overview of Related Research
- DRP does not determine the lot size or safety stock. These decisions represent inputs to the process;
- DRP does not explicitly consider any costs. These costs are still relevant because a user must evaluate costs of delivery;
- DRP systems cannot recalculate forecast if demand is changed in real-time (stochastic demand).
- a centralized multi-echelon multi-product inventory control system with transparency of information within the distribution network, but without the necessary software information systems;
- nine regional pharmaceutical markets should be managed by a centralized inventory control model in PSC;
- the products should be distributed directly from the manufacturer to the customers because the distribution company does not store items in the main branch;
- a different FOQ or LFL order quantity should be considered for each product;
- a lead time (LT) is variable (approximately five months) and different for each product;
- an inventory plan is based on a monthly sales forecast for three months after the lead time period expiration and realized stochastic demand;
- shortages are allowed but not backlogged;
- two objective functions should be considered, the maximization of the difference between the planned average inventory level and the realized average inventory level and the minimization of the stock-out situations;
- the software solution should be affordable, but dynamic, flexible, and relatively easy to implement and use.
3. Problem Description
4. Methodology
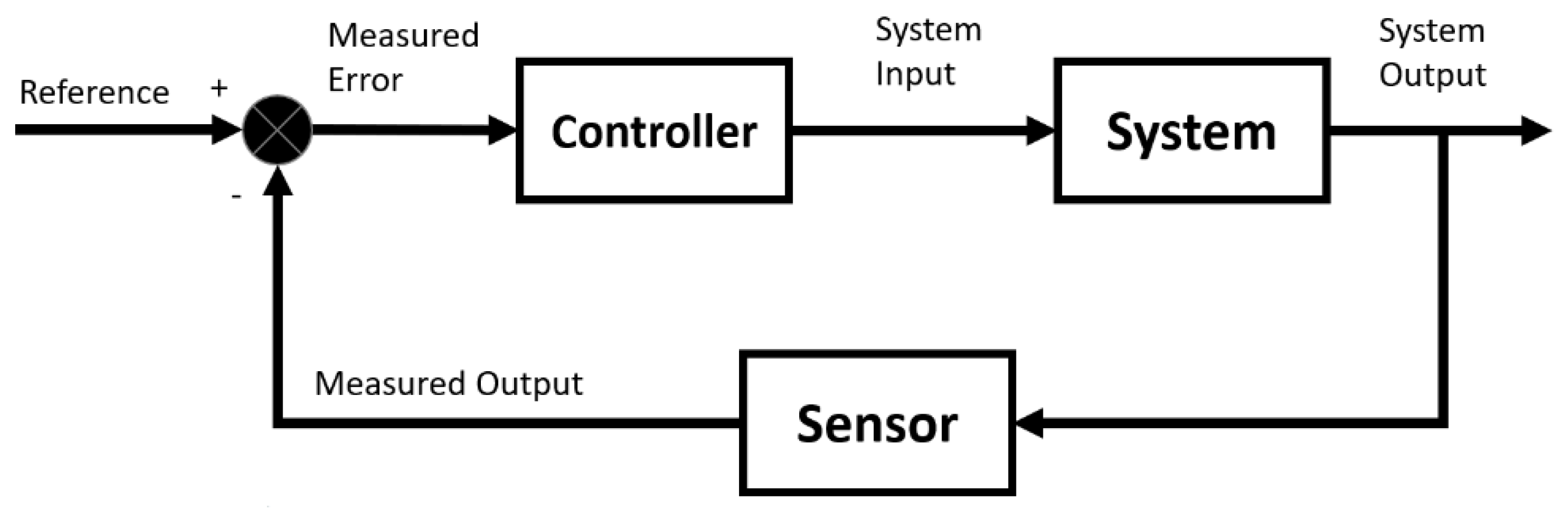
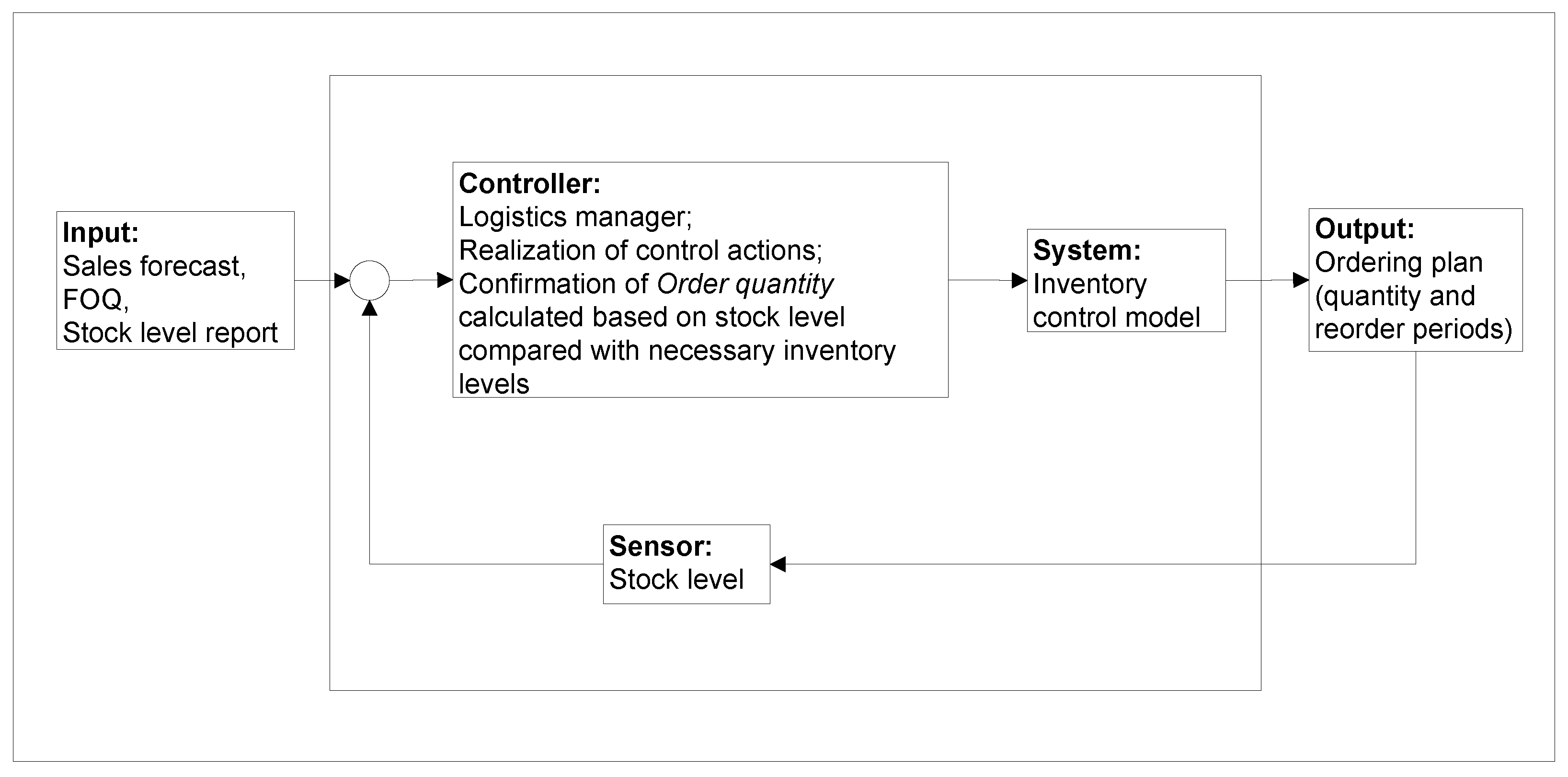
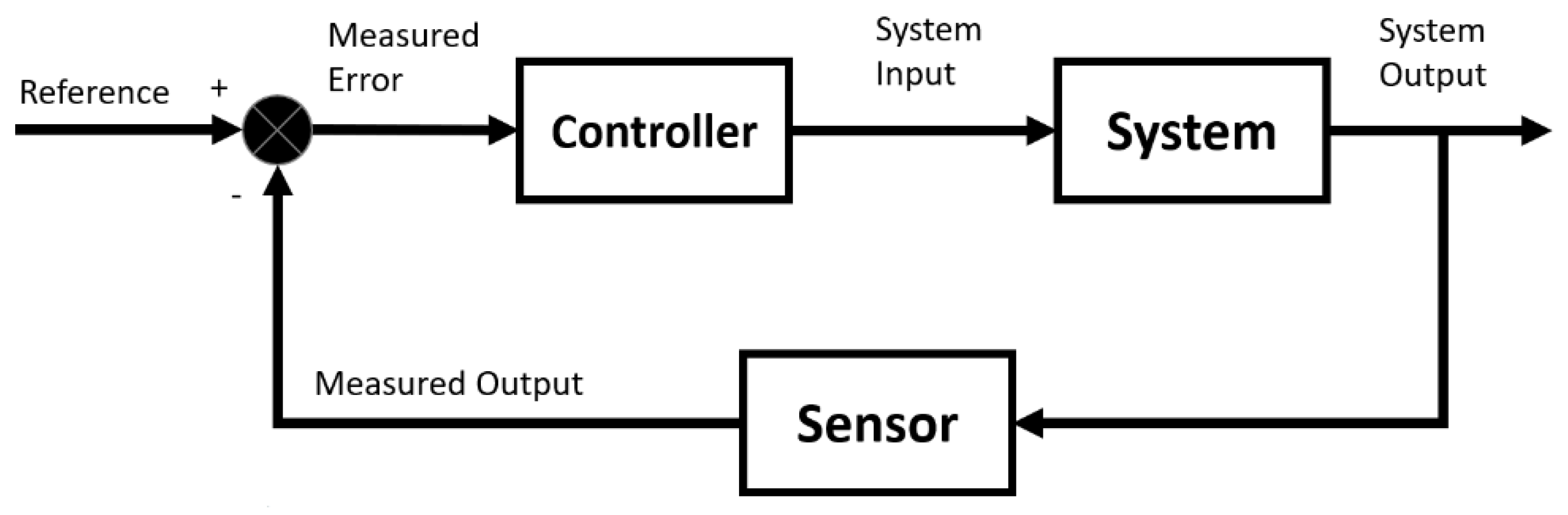
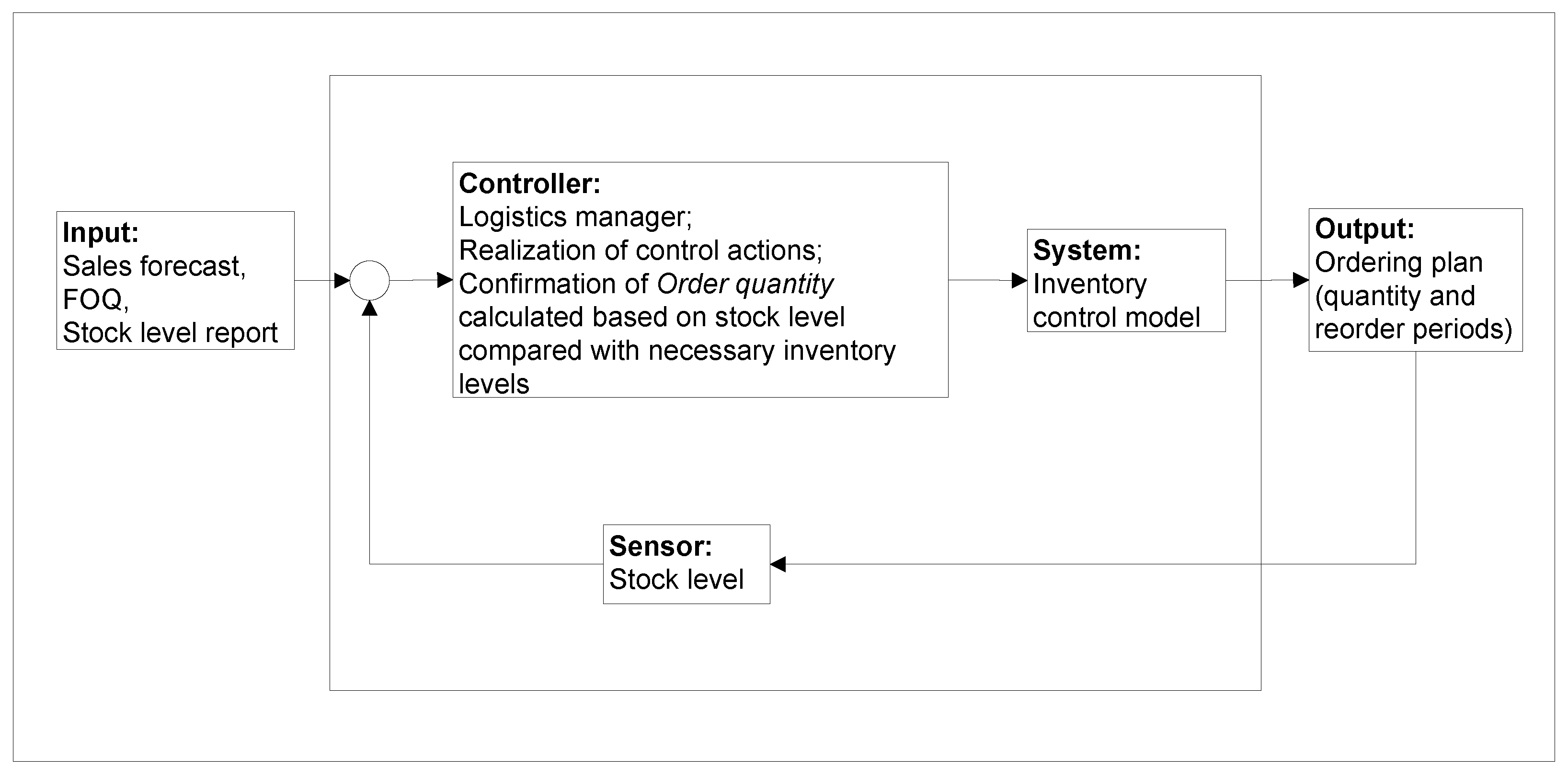
4.1. Modern Control Theory
- –
- A system or plant (the object to be controlled);
- –
- A sensor (used for measuring the system’s output);
- –
- A comparator (used for comparison of the input or reference signal and the output signal converted by the sensor);
- –
- A controller (an element that generates the system’s input–control action).
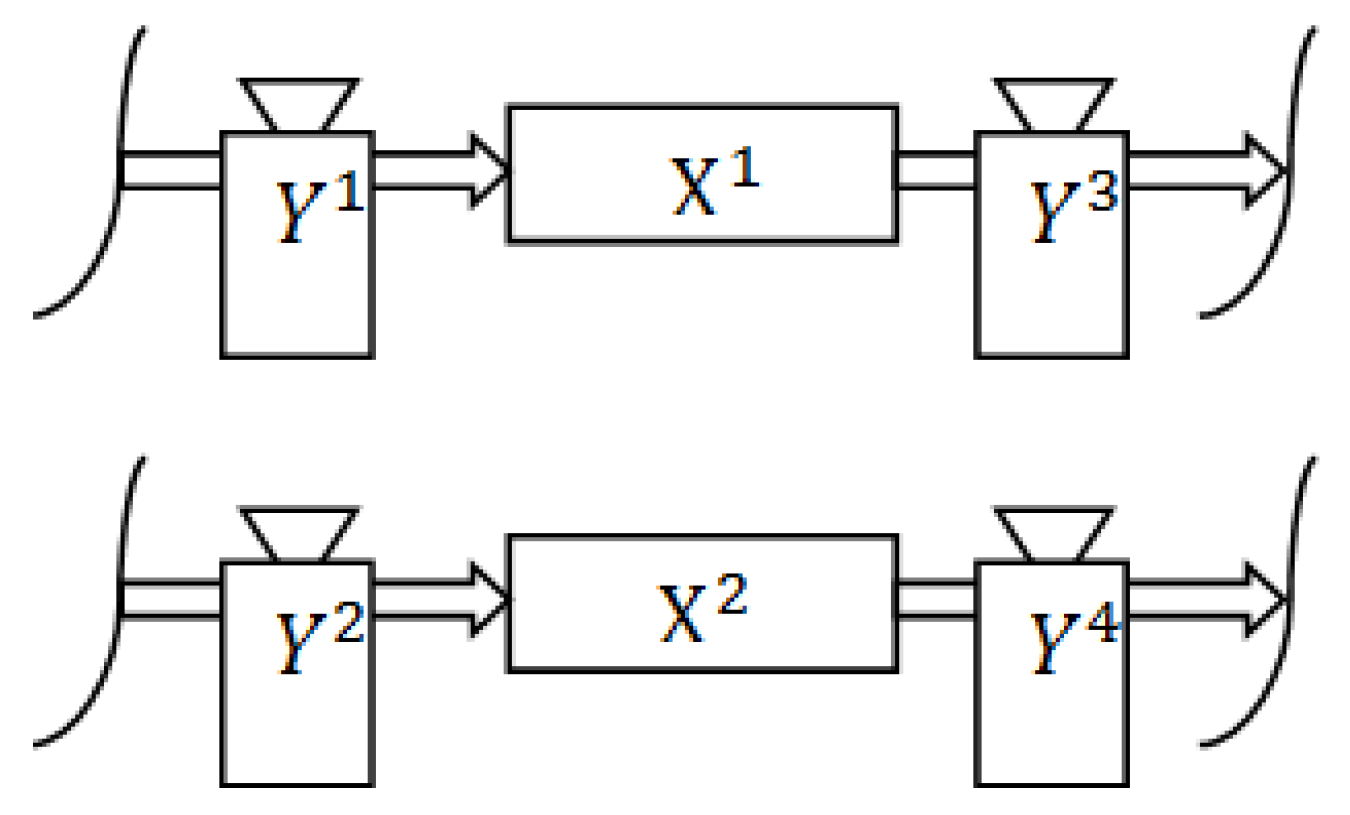
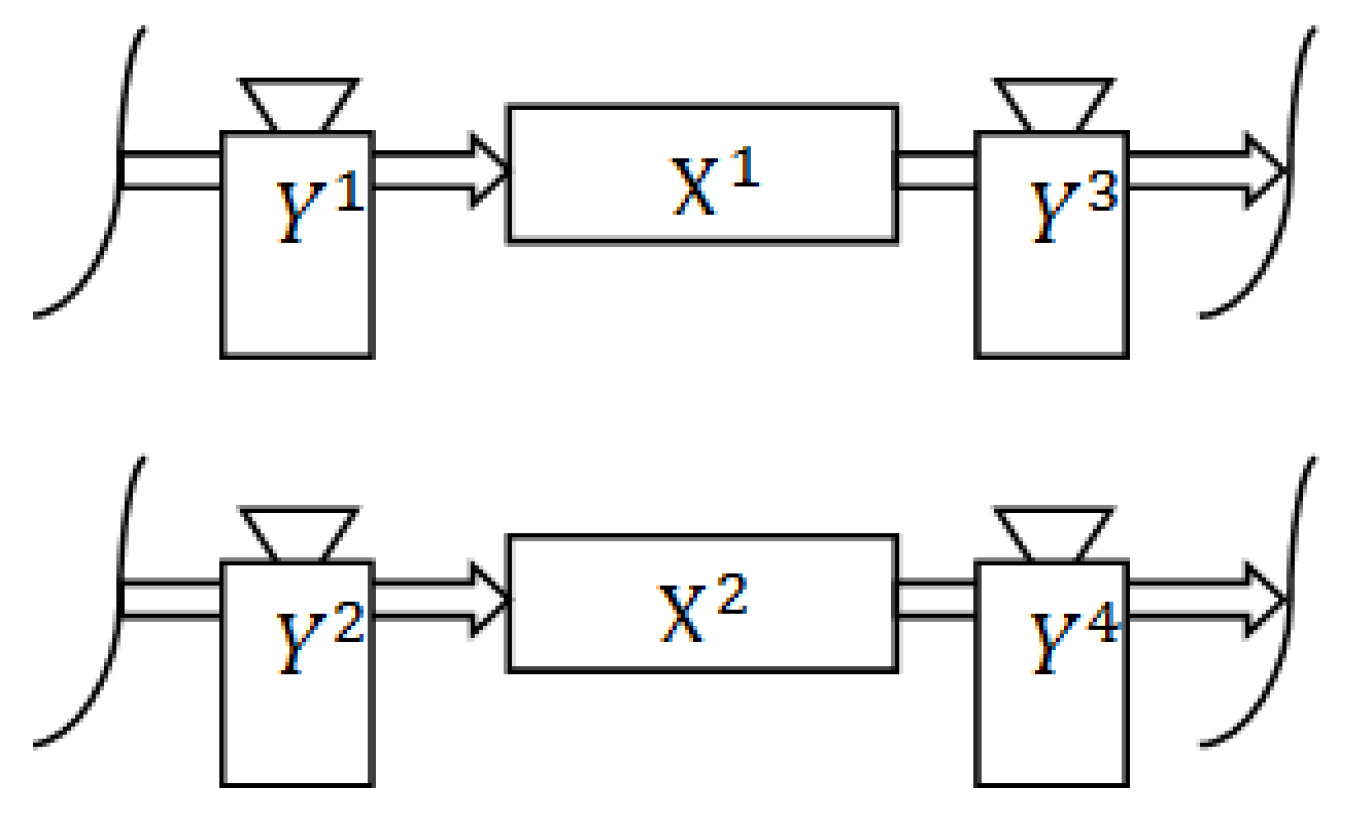
4.2. Discrete-Time System Control—System Dynamics Modelling
- —State variable. Planned stock level of a product on hand at the end of period t.
- —State variable. Realized stock level of a product on hand at the end of period t.
- —Inflow regulator variable (left upper). Planned stock input of a product at the beginning of period t.
- —Inflow regulator variable (left lower). Realized stock input of a product at the beginning of period t.
- —Outflow regulator variable (right upper). Forecasted sales plan for a product for period t.
- —Outflow regulator variable (right lower). Realized sales of a product at period t.
5. Mathematical Formulation, Assumptions and Notation
5.1. Assumptions
- Lead time (LT) includes the time necessary for the delivery of goods from the manufacturer to the distributor. Delivery time includes time periods from ordering to receiving the goods.
- Shortages are allowed but not backlogged, i.e., stock-out situations should be minimized.
- The initial inventory level is known.
- Order quantity depends on the observed instance:
- ○
- Fixed, i.e., the manufacturer defines the fixed order quantity per each product, but periods between orders are not fixed.
- ○
- Lot-for-lot, i.e., cumulative monthly sales forecast for three months, in a moving horizon situation, after the lead time period is expired, but periods between orders are not fixed.
- The sales forecast is known and forecasted for two years.
5.2. Notation
- –
- m–Total number of products ( = 1, 2, …, m).
- –
- T–Finite time horizon T = 24 months (t = 1, 2, …, T).
- –
- LT–Delivery lead time.
- –
- –Planned stock level of product on hand at the end of period t. This phase of accumulation represents the total amount of product i remaining on the stock at the end of period t on the flow of the planned state of inventory .
- –
- –Realized stock level of product on hand at the end of period t. This phase of accumulation represents the total amount of product i remaining in the stock at the end of period t, on the flow of the realized state of inventory .
- –
- –Planned stock input of product at the beginning of period t. This inflow regulator represents the amount of product expected to be delivered after the lead time at the beginning of period t. It is the regulator of the flow of the planned inventory state –Realized stock input of product at the beginning of period t. The inflow regulator represents the input variable that relates to the inventory fulfilment at the beginning of the month. This flow regulator represents the amount of product delivered to the warehouse after the lead time expiry. It pertains to the flow of the realized state of inventory. The variable value is confirmed in the company’s software when order quantity arrives in the stock .
- –
- –Forecasted sales plan for product for period t. This outflow regulator represents the amount of product planned for withdrawing from the accumulation of the planned inventory state continuously per month. The sales manager forecasts the sales plan for 24 months .
- –
- –Realized sales of product at period t. This outflow regulator represents the amount of product actually withdrawn from the accumulation of the realized state of inventory continuously per month .
- –
- –FOQ for the product in period t, defined by manufacturer .
- –
- –LFL order quantity for each product i .
- –
- –The auxiliary variable representing value from a stock level report for product at the beginning of period t , and representing value obtained from stock level report, which is provided each month from a warehouse of a distributor. This variable presents an exact level of inventory for product i.
- –
- –The auxiliary variable indicates if the planned stock level on hand is greater than security stock for product in period t .
- –
- –The planned re-order quantity for product in period t .
- –
- –The security stock for product in period t of time horizon T (.
- –
- –The planned average level of stock for product in period t of time horizon T ().
- –
- ∆ti–The auxiliary variable for calculation of the in the case of a lot-for-lot ordering policy ().
5.3. Mathematical Formulation of the Inventory Control Problem
- The same or variable amount of product , depending on the ordering policy, is ordered with no constant time ti between the two orders.
- The ordered amount arrives on the stock simultaneously and immediately after LT, while products are withdrawn from the stock continuously by the rate of the sales plan.
- -
- –The maximization of the difference between the planned average level of inventory and the realized average level of inventory.
- -
- –The minimization of the number of stock-out situations.
6. The Inventory Control Model Implementation
7. Sensitivity Analysis and Numerical Results
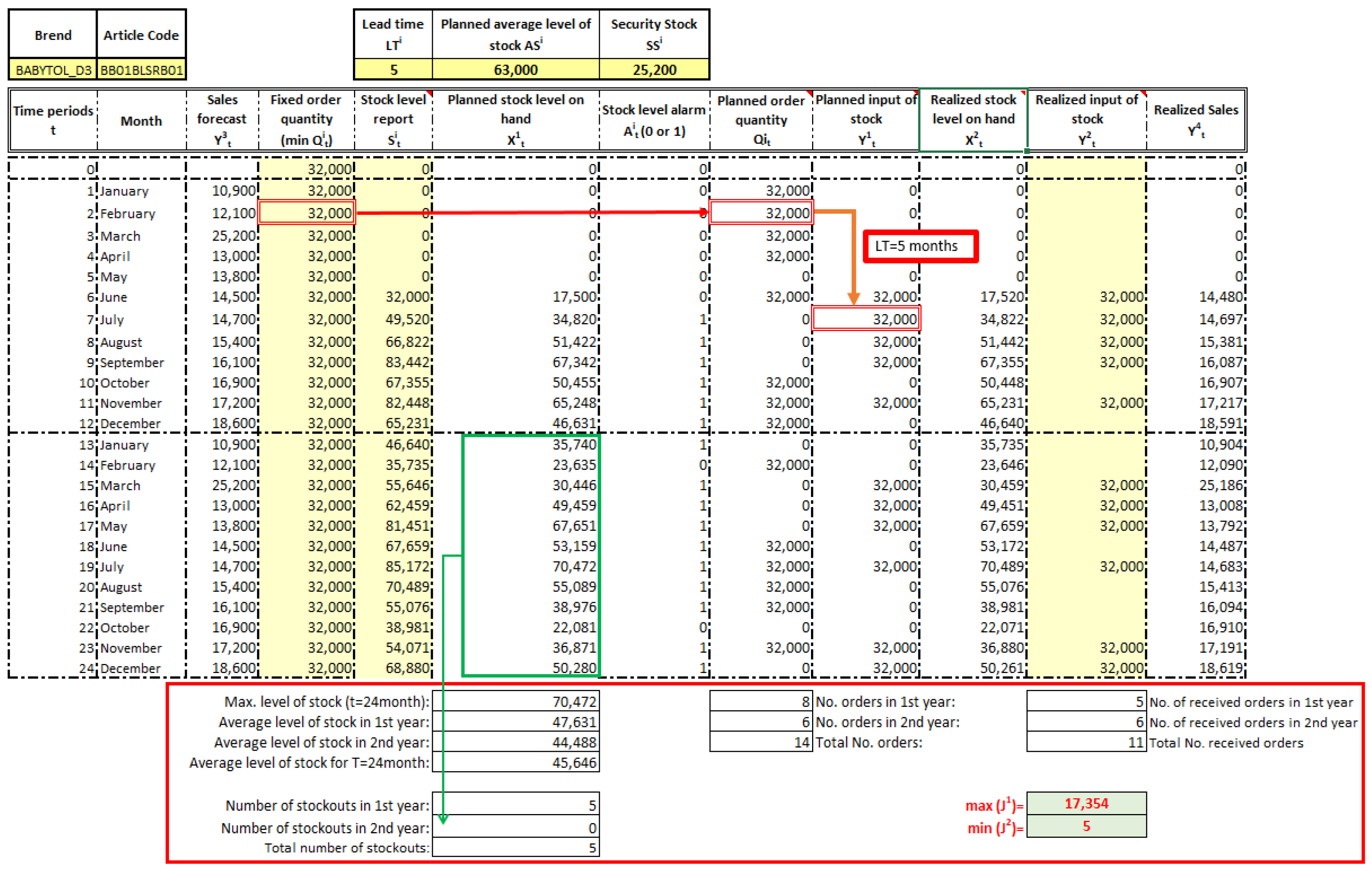
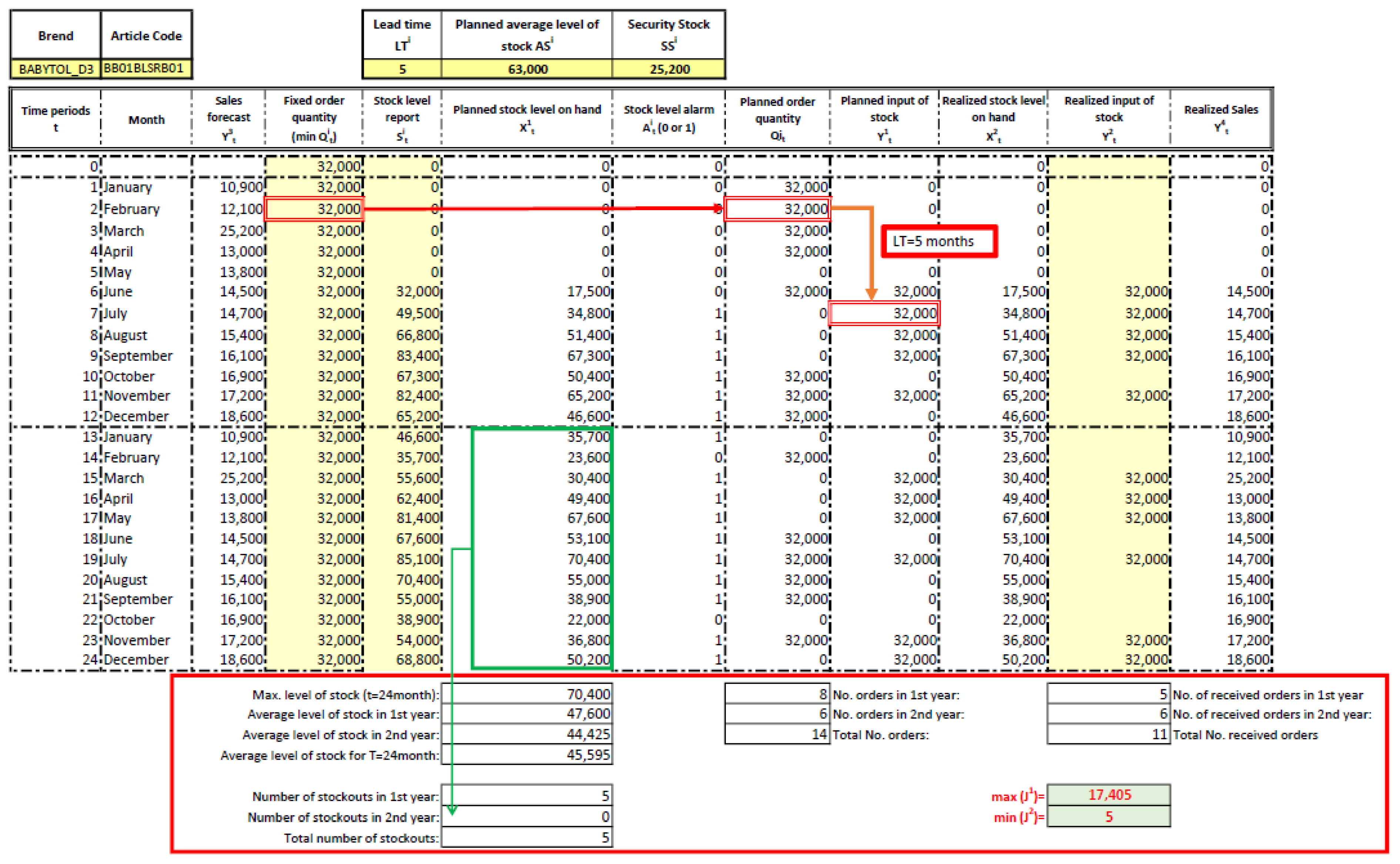
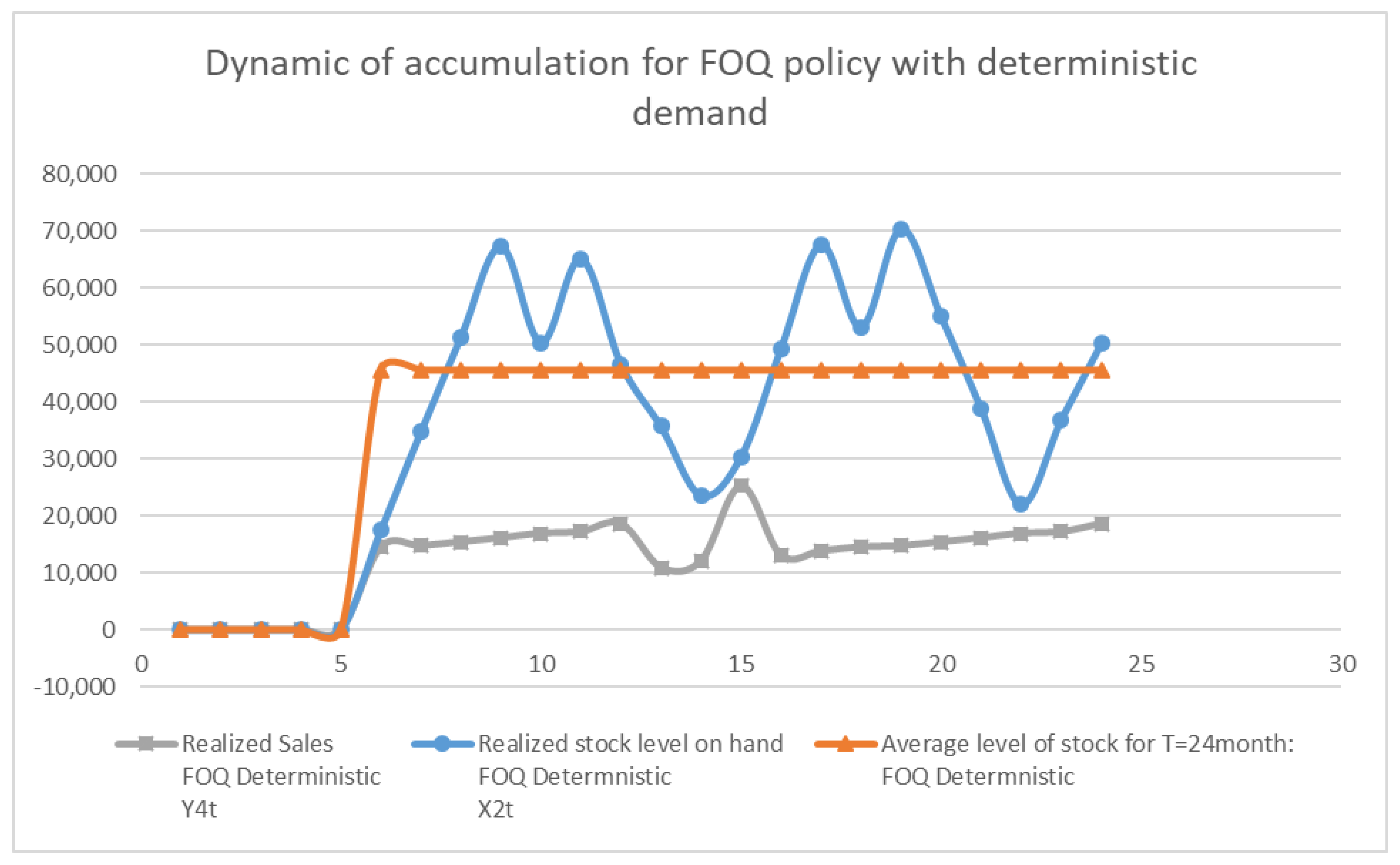
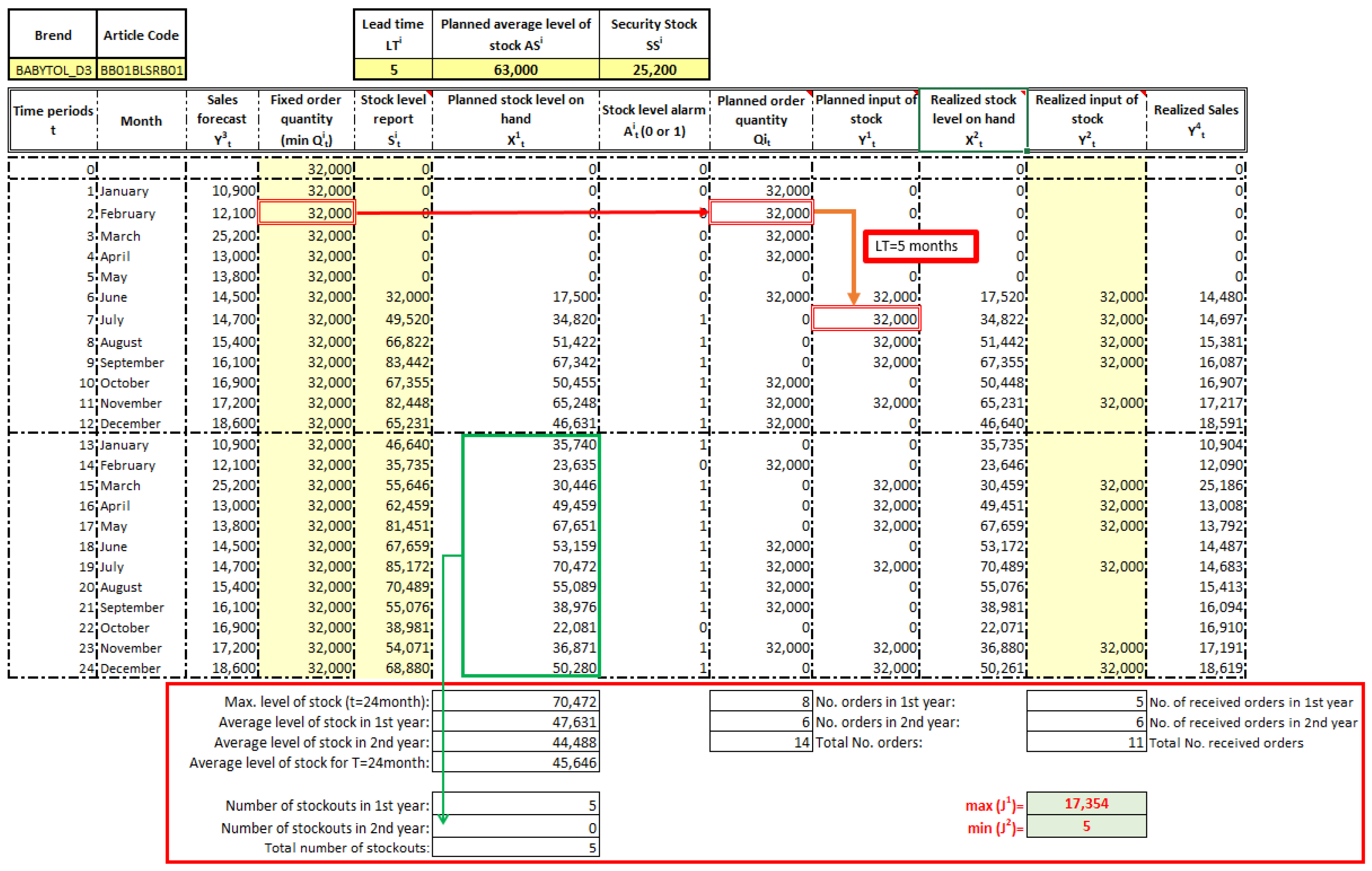
7.1. Instance 1: FOQ Ordering Policy
- The initial level of inventory for products is zero in the case of launching a new product into the market. In this case, the first order will be launched at the beginning of January and delivered at the beginning of June (LT = 5 months).
- Based on historical data from previous years and experience, the manager forecasts monthly sales at the beginning of the first year for the next 2 years.
- The supplier defines the FOQ for each product. Since the FOQ is not unique for each product, the unit price depends on the ordered quantity.
- At the beginning of every month, customers from all countries send stock level reports to the company’s logistics manager. This report represents the prescribed form and format in an Excel spreadsheet.
- The delivery lead time is five months. The quantity ordered at the beginning of February is in stock at the beginning of July.
- At the beginning of the first year, there are no realized inputs of stock for launched orders from the previous periods.
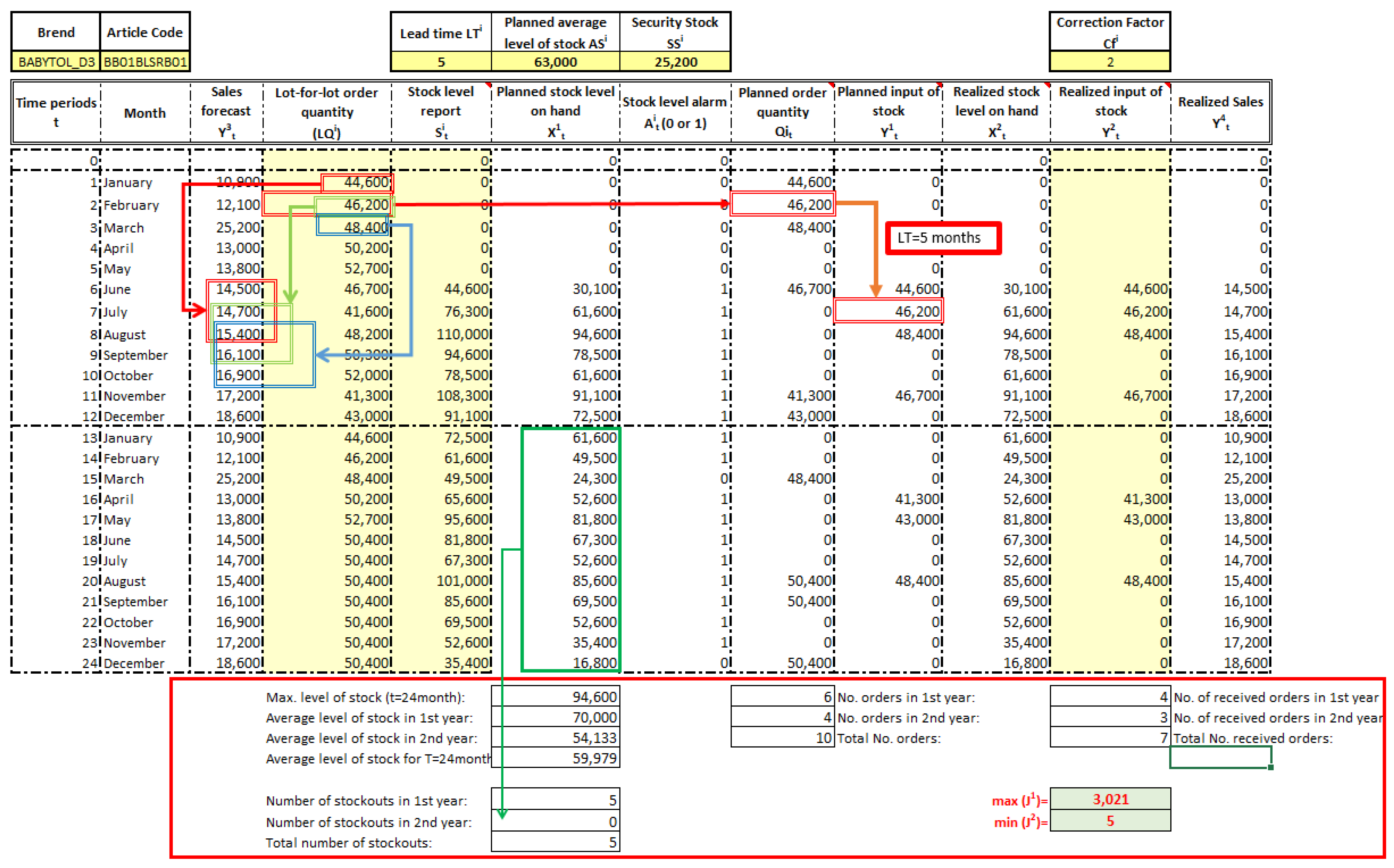
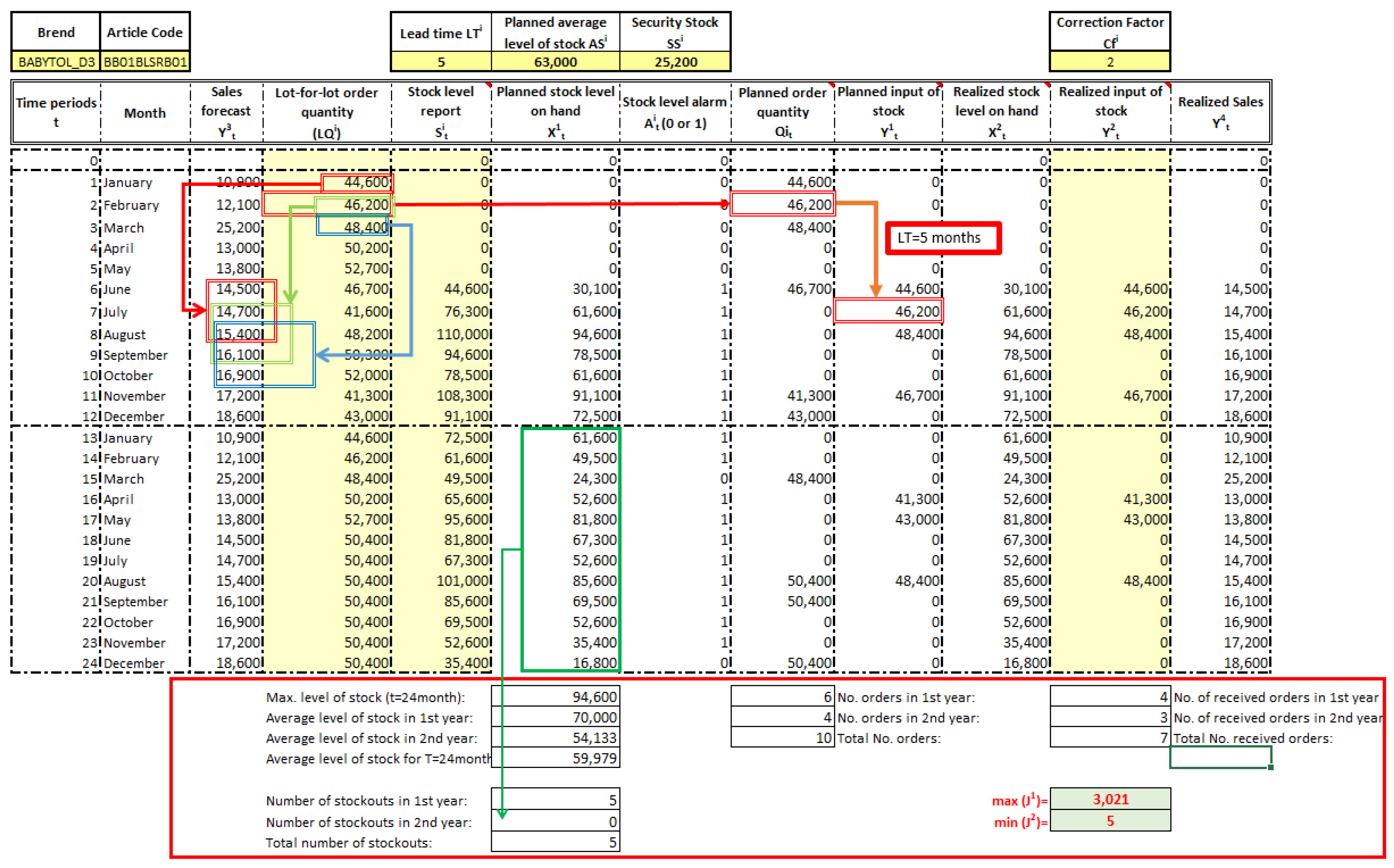
7.2. Instance 2: LFL Ordering Policy
7.3. Comparison of Numerical Results for Instance 1 and Instance 2
8. Conclusions
- –
- FOQ- and LFL-based models determine lot size and safety stock.
- –
- These models recalculate order quantities and reorder points if demand is changed in real-time.
- –
- The full automation of the model is based on the concept of feedback control.
- –
- The structure of the model is precisely defined according to the object of discrete control with an adequate mathematical apparatus.
- –
- Modern control theory (MCT), i.e., self–regulation and feedback control concepts, with relevant elements (sensor, comparator, controller, system) of the feedback loop are applied during the development of the conceptual model.
- –
- The mathematical model presented in the paper is comprised of two flows. The planned inventory state represents information flow, while the actual inventory state refers to material flow. Each flow has one phase of accumulation and two phases of action. Two sales variables and two inventory state variables, planned and realized, are precisely mathematically defined, with their mutual influence, i.e., the impact of the actual state of inventory on the future, and the planned inventory state.
- –
- The performance criterion of the inventory system is defined and described through two objective functions, the maximization of the difference between the planned average inventory level and the realized average inventory level and the minimization of the number of stock-out situations.
- –
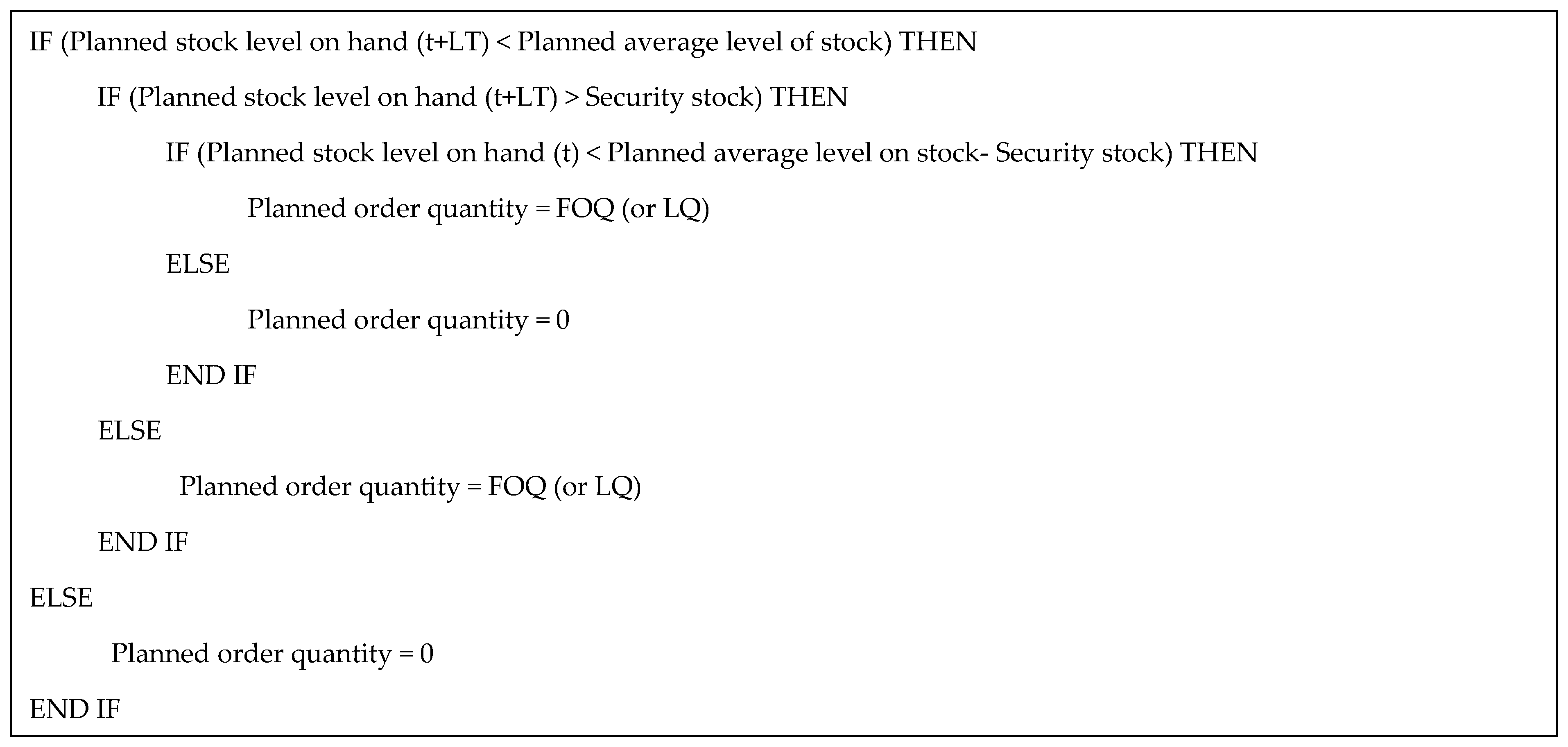
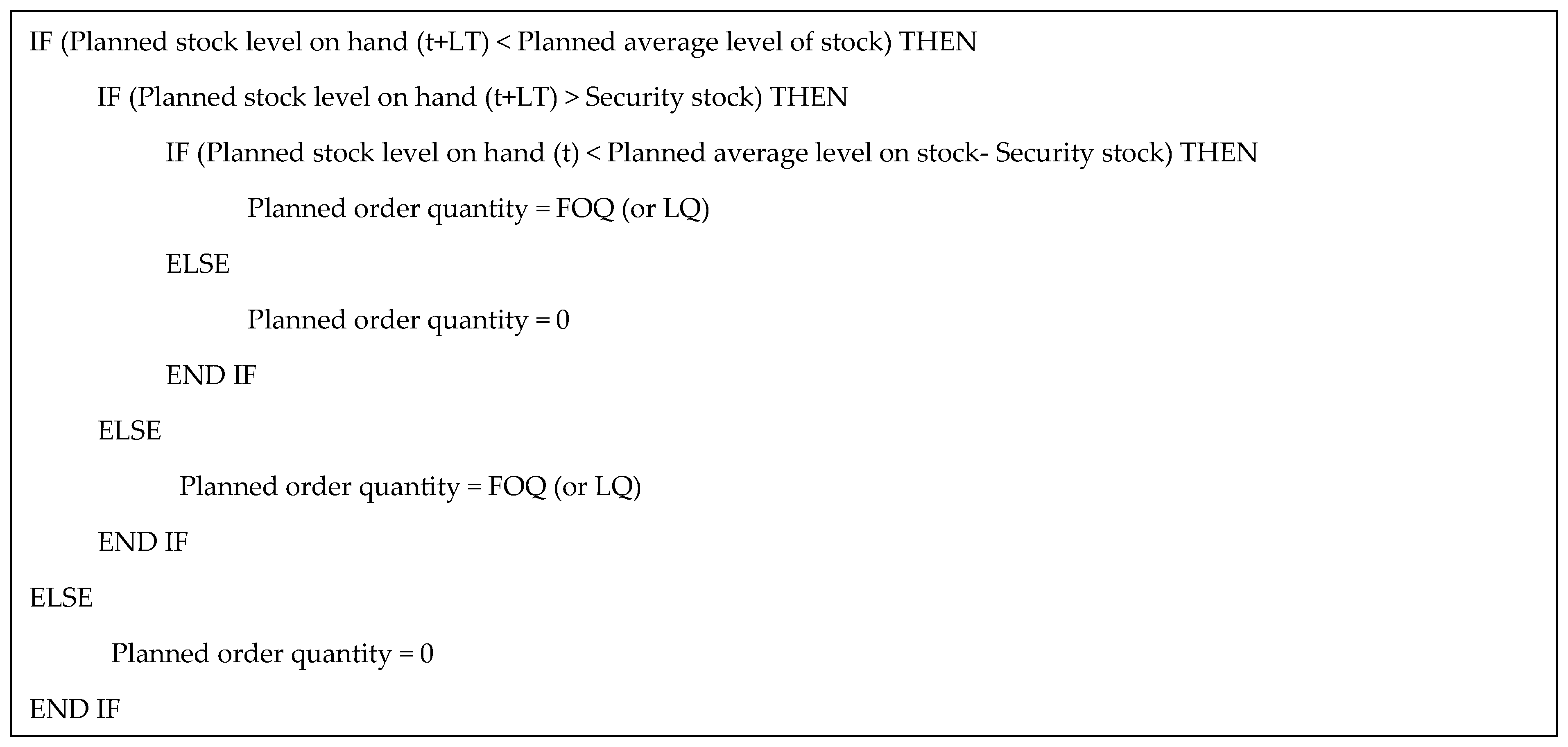
- The originally developed comparison algorithm for the planned order quantity reflects the decision tree for comparison of all relevant stock variables.
- –
- Sensitivity analysis is conducted, and numerical results are explained clearly with all supporting data.
- –
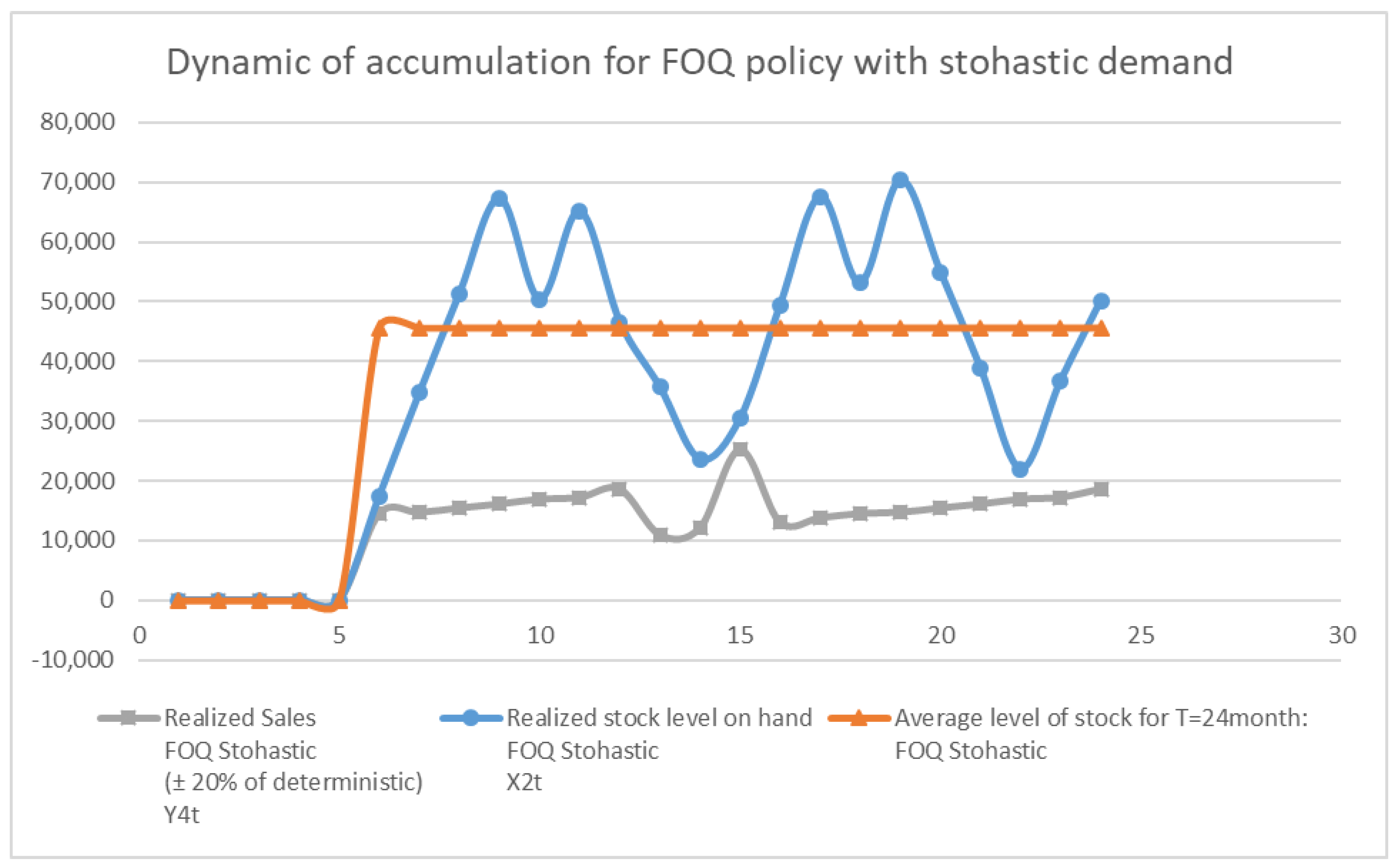
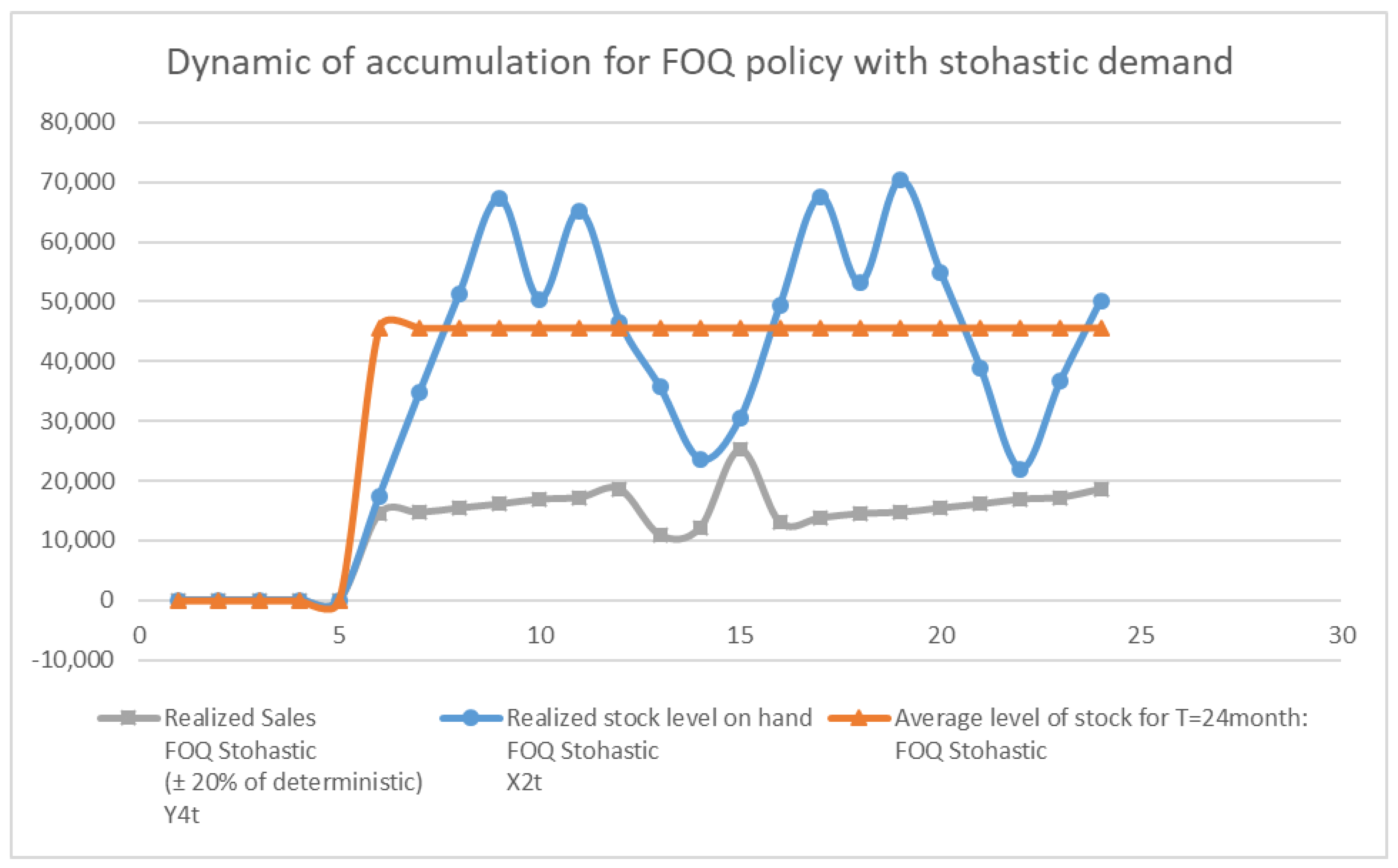
- Stochastic demand is generated as a random variation of sales forecast in the range of ±20%. Numerical results are compared for deterministic and stochastic actual sales.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hoque, M.E.; Paul, N. Inventory Management of Pharmaceutical Industries in Bangladesh. In Proceedings of the International Conference on Mechanical Engineering 2011 (ICME2011), Dhaka, Bangladesh, 18–20 December 2011. [Google Scholar]
- Uthayakumar, R.; Priyan, S. Pharmaceutical supply chain and inventory management strategies: Optimization for a pharmaceutical company and a hospital. Oper. Res. Health Care 2013, 2, 52–64. [Google Scholar] [CrossRef]
- Management Sciences for Health. MDS-3: Managing Access to Medicines and Health Technologies; Management Sciences for Health: Arlington, VA, USA, 2012. [Google Scholar]
- Axsäter, S. Inventory Control; Springer: Berlin/Heidelberg, Germany, 2015; Volume 225. [Google Scholar] [CrossRef]
- Kwak, C.; Choi, J.S.; Kim, C.O.; Kwon, I.H. Situation reactive approach to vendor managed inventory problem. Expert Syst. Appl. 2009, 36, 9039–9045. [Google Scholar]
- Grob, C. Inventory Management in Multi-Echelon Networks: On the Optimization of Reorder Points; Springer: Berlin/Heidelberg, Germany, 2018; Volume 128. [Google Scholar]
- Qiu, Y.; Qiao, J.; Pardalos, P.M. Optimal production, replenishment, delivery, routing and inventory management policies for products with perishable inventory. Omega 2019, 82, 193–204. [Google Scholar] [CrossRef]
- Perez, H.D.; Hubbs, C.D.; Li, C.; Grossmann, I.E. Algorithmic Approaches to Inventory Management Optimization. Processes 2021, 9, 102. [Google Scholar]
- Srinivasarao, G. Overview of Inventory Optimization in Operations Management. In Business Research and Innovation, Proceedings of the International Conference on Business Research and Innovation ICBRI 2021, Murshidabad, India, 26–27 February 2021; Excel India Publishers: New Delhi, India, 2021; pp. 486–492. [Google Scholar]
- Settanni, E.; Harrington, T.S.; Srai, J.S. Pharmaceutical supply chain models: A synthesis from a systems view of operations research. Oper. Res. Perspect. 2017, 4, 74–95. [Google Scholar] [CrossRef] [Green Version]
- Lemmens, S.; Decouttere, C.; Vandaele, N.; Bernuzzi, M. A review of integrated supply chain network design models: Key issues for vaccine supply chains. Chem. Eng. Res. Des. 2016, 109, 366–384. [Google Scholar] [CrossRef]
- Fahimnia, B.; Farahani, R.Z.; Marian, R.; Luong, L. A review and critique on integrated production—Distribution planning models and techniques. J. Manuf. Syst. 2013, 32, 1–19. [Google Scholar] [CrossRef]
- Nagurney, A.; Li, D. A supply chain network game theory model with product differentiation, outsourcing of production and distribution, and quality and price competition. Ann. Oper. Res. 2015, 226, 479–503. [Google Scholar] [CrossRef]
- Agrell, P.J.; Hatami-Marbini, A. Frontier-based performance analysis models for supply chain management: State of the art and research directions. Comput. Ind. Eng. 2013, 66, 567–583. [Google Scholar]
- Antic, S.; Djordjevic, L.; Lisec, A. Case study: Dynamic discrete model of fixed order point quantity system for inventories in pharmaceutical distribution. In Proceedings of the 21st International Symposium on Logistics (ISL 2016), Kaohsiung, Taiwan, 3–6 July 2016; pp. 455–462. [Google Scholar]
- 4U Pharma. 4youpharma. 2018. Available online: http://4youpharma.com/ (accessed on 12 April 2019).
- Vila-Parrish, A.R.; Ivy, J.S. Managing supply critical to patient care: An introduction to hospital inventory management for pharmaceuticals. In Handbook of Healthcare Operations Management; Springer: New York, NY, USA, 2013; pp. 447–463. [Google Scholar]
- Li, J.; Liu, L.; Hu, H.; Zhao, Q.; Guo, L. An inventory model for deteriorating drugs with stochastic lead time. Int. J. Environ. Res. Public Health 2018, 15, 2772. [Google Scholar] [CrossRef] [Green Version]
- Khodaverdi, R.; Shahbazi, M.; Azar, A.; Fathi, M.R. A Robust Optimization Approach for Sustainable humanitarian supply chain management of blood products. Int. J. Hosp. Res. 2022, 11. Available online: http://ijhr.iums.ac.ir/article_139129.html (accessed on 20 January 2022).
- Zandieh, M.; Janatyan, N.; Alem-Tabriz, A.; Rabieh, M. Designing sustainable distribution network in pharmaceutical supply chain: A case study. Int. J. Supply Oper. Manag. 2018, 5, 122–133. [Google Scholar]
- Narayana, S.A.; Arun, E.A.; Rupesh, P.K. Reverse logistics in the pharmaceuticals industry: A systemic analysis. Int. J. Logist. Manag. 2014, 25, 379–398. [Google Scholar] [CrossRef]
- Hansen, K.R.N.; Grunow, M. Planning operations before market launch for balancing time-to-market and risks in pharmaceutical supply chains. Int. J. Prod. Econ. 2015, 161, 129–139. [Google Scholar] [CrossRef]
- Ahmadi, E.; Masel, D.T.; Metcalf, A.Y.; Schuller, K. Inventory management of surgical supplies and sterile instruments in hospitals: A literature review. Health Syst. 2019, 8, 134–151. [Google Scholar] [CrossRef] [PubMed]
- Schmitt, A.J.; Sun, S.A.; Snyder, L.V.; Shen, Z.J.M. Centralization versus decentralization: Risk pooling, risk diversification, and supply chain disruptions. Omega 2015, 52, 201–212. [Google Scholar] [CrossRef]
- Enns, S.T.; Suwanruji, P. Distribution planning and control: An experimental comparison of DRP and order point replenishment strategies. In Proceedings of the Academy of Business and Administrative Sciences, 2000 International Conference, Prague, Czech Republic, 10 July 2000. [Google Scholar]
- Seok, H.; Nof, S.Y. Intelligent information sharing among manufacturers in supply networks: Supplier selection case. J. Intell. Manuf. 2018, 29, 1097–1113. [Google Scholar] [CrossRef]
- Chapman, S.N.; Arnold, J.T.; Gatewood, A.K.; Clive, L.M. Introduction to Materials Management; Pearson Education Limited: New York, NY, USA, 2017. [Google Scholar]
- Russell, R.S.; Taylor, B.W. Operation Management: Quality and Competitiveness in a Global Environment; John Wiley & Sons: New York, NY, USA, 2006; pp. 529–552. [Google Scholar]
- Chase, R.; Aquilano, N. Operations Management for Competitive Advantage; IRWIN: New York, NY, USA, 2004; pp. 542–560. [Google Scholar]
- Barlow, J.F. Excel Models for Business and Operations Management; John Wiley & Sons: New York, NY, USA, 2005; pp. 244–258. [Google Scholar]
- Muller, M. Essentials of Inventory Management; Harper Collins Leadership: New York, NY, USA, 2019. [Google Scholar]
- Wild, T. Best Practice in Inventory Management; Elsevier Science: London, UK, 2017; pp. 112–148. [Google Scholar]
- Grubbström, R.W.; Bogataj, L.; Bonney, M.C.; Disney, S.C.; Tang, O. Inter-Linking MRP Theory and Production and Inventory Control Models. In Proceedings of the 13th International Working Conference on Production Economics, Igls, Austria, 16–20 February 2004. [Google Scholar]
- Franco, C.; Alfonso-Lizarazo, E. A structured review of quantitative models of the pharmaceutical supply chain. Complexity 2017, 2017, 5297406. [Google Scholar] [CrossRef] [Green Version]
- Saha, E.; Ray, P.K. Modelling and analysis of inventory management systems in healthcare: A review and reflections. Comput. Ind. Eng. 2019, 137, 106051. [Google Scholar] [CrossRef]
- Bubnicki, Z. Modern Control Theory; Springer: Berlin/Heidelberg, Germany, 2002. [Google Scholar]
- Antic, S.; Kostic, K.; Dordevic, L. Spreadsheet Model of Inventory Control Based on Modern Control Theory. In Proceedings of the 13th International Symposium SymOrg: Innovative Management and Business Performance, Zlatibor, Serbia, 5–9 June 2012. [Google Scholar]
- Doyle, J.; Francis, B.; Tannenbaum, A. Feedback Control Theory; Macmillan Publishing Co.: Basingstoke, UK, 1990. [Google Scholar]
- Zook, D.; Bonne, U.; Samad, T. Control Systems, Robotics and Automation; Eoloss publishers: Oxford, UK, 2009. [Google Scholar]
- Andrei, N. Modern Control Theory-A historical perspective. Stud. Inform. Control 2006, 15, 51. [Google Scholar]
- Aström, K.J.; Murray, R.M. Feedback Systems: An Introduction for Scientists and Engineers; Princeton University Press: Princeton, NJ, USA, 2010. [Google Scholar]
- Azarskov, V.N.; Skurikhin, V.I.; Zhiteckii, L.S.; Lypoi, R.O. Modern Control Theory Applied to Inventory Control for a Manufacturing System. IFAC Proc. Vol. 2013, 46, 1200–1205. [Google Scholar] [CrossRef]
- Ying, Z.; Weiguo, W.; Qiushuang, H.; Ye, X.; Hong, J. Inventory control based on a real-moment dynamic model. In Proceedings of the 2011 International Conference on Management Science and Industrial Engineering (IEEE), Harbin, China, 6–11 January 2011; pp. 838–841. [Google Scholar]
- Shin, J.; Lee, J.; Park, S.; Koo, K.K.; Lee, M. Analytical design of a proportional-integral controller for constrained optimal regulatory control of inventory loop. Control Eng. Pract. 2008, 16, 1391–1397. [Google Scholar] [CrossRef]
- Tako, A.A.; Robinson, S. The application of discrete event simulation and system dynamics in the logistics and supply chain context. Decis. Support Syst. 2012, 52, 802–815. [Google Scholar] [CrossRef] [Green Version]
- Ossimitz, G.; Mrotzek, M. The Basics of System Dynamics: Discrete vs. Continuous Modelling of Time. In Proceedings of the 26th International Conference of the System Dynamics Society, Athens, Greece, 20–24 July 2008. [Google Scholar]
- Kostić, K. Inventory control as a discrete system control for the fixed-order quantity system. Appl. Math. Model. 2009, 33, 4201–4214. [Google Scholar] [CrossRef]
- Wagner, H.M.; Whitin, T.M. Dynamic version of the economic lot size model. Manag. Sci. 1958, 5, 89–96. [Google Scholar] [CrossRef]
- Scarf, H. The Optimality of (s; S) Policies in the Dynamic Inventory Problem. In Mathematical Methods in the Social Sciences; Arrow, K.J., Karlin, S., Suppes, P., Eds.; Stanford University Press: Stanford, CA, USA, 1959. [Google Scholar]
- Bertsekas, D.P. Dynamic Programming, Deterministic and Stochastic Models; Prentice-Hall: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Jans, R.; Degraeve, Z. Meta-heuristics for dynamic lot sizing: A review and comparison of solution approaches. Eur. J. Oper. Res. 2007, 177, 1855–1875. [Google Scholar] [CrossRef]
- Đorđević, L.; Antić, S.; Čangalović, M.; Lisec, A. A metaheuristic approach to solving a multiproduct EOQ-based inventory problem with storage space constraints. Optim. Lett. 2017, 11, 1137–1154. [Google Scholar] [CrossRef]
- Antic, S.; Djordjevic, L.; Kostic, K.; Lisec, A. Dynamic discrete simulation model of an inventory control with or without allowed shortage. UPB Sci. Bull. Ser. A 2015, 77, 163–176. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | Real-Life Problem Settings | Conceptual Model | Mathematical Model | Real-World Settings Implementation/ Practical Validation | Software Solution |
|---|---|---|---|---|---|
| [1] | No | No | Inventory management simulation model. | No | Arena simulation software |
| [2] | No | No | Inventory model that integrates continuous review with production and distribution for a supply chain involving a pharmaceutical company and a hospital supply chain. | No | MATLAB |
| [13] | No | Graphical representation of the supply chain network topology with outsourcing. | A supply chain network game theory model with product differentiation, outsourcing of production and distribution, and price and quality competition. | No | Not mentioned |
| [17] | The authors analysed data from a large urban hospital in order to model the patient demand process for Meropenem and proposed a nonstationary model for managing the drug. | No | A two-stage (multi-echelon) perishable inventory model | The model evaluation based on data from a large urban hospital that has over 350 inpatient beds and more than 14,000 adult admissions per year | Not mentioned |
| [18] | The study addresses the liquid pharmaceutical preparations inventory problem of a hospital. | No | A stochastic lead time inventory model for deteriorating drugs with fixed demand. | The authors used relevant data from a hospital in order to obtain the optimal reordering point, the optimal ordering lot sizes and optimal ordering cycle in weighting the shelf life of drugs and service level. | Not mentioned |
| [19] | Optimization of the sustainable humanitarian supply chain of blood products in Tehran. | A five-echelon blood supply chain network is presented that includes donors, mobile, fixed and regional blood collection centres, and hospitals. | A robust multi-echelon multi-objective mixed integer linear programming optimization model. | The application of the proposed model is investigated in a case problem in Tehran, where real data is utilized to design a network for emergency supply of blood during potential disasters. | The model is coded in GAMS and solved by CPLEX solver. |
| [20] | No, but the proposed sustainable distribution network model in pharmaceutical supply chain is customized for a real case study in Iran. | No | A multi-objective model fordesigning of a pharmaceutical distribution network according to the main concepts of sustainability i.e., economic, environmental and social. | The model is validated in the pharmaceutical distribution company in Iran, Darupakhsh Distribution Company. | Not mentioned |
| [21] | A systems thinking and modelling methodology was used to explore the functioning of the reverse logistics process in the Indian pharmaceutical industry, at a strategic level. | Based on System Dynamics. | No | Data collection was confined to stakeholders belonging to a PSC in the South Indian state of Kerala. The application of systems thinking and modelling was limited to the qualitative phases of the methodology. | Not mentioned |
| [22] | The considered case study is based on a comprehensive empirical study of nine different North European pharmaceutical companies. | A fully-specified case study research underpins the formulation of a mathematical model of the PSC. | A two-stage stochastic MILP model for addressing market launch planning in the pharmaceutical industry. | The model is applied to a case based on an empirical study. Only the market data has been generated through random sampling based on literature data. | OPL Studio 6.0 |
| Current study | A real-life inventory control problem in a private pharmaceutical distribution company from the Republic of Serbia. | The modern control theory, System Dynamics and feedback control concepts based. | Dynamic discrete multi-echelon multi-product inventory control model. | Real-life data, collected over two years, are used for the validation of the proposed model and the solution procedure. The applicability of the model has been proven by its usage for procurement planning in the company within the period of two years. The created plan comprised more than 50 products per country for several countries from Eastern-Central Europe. | The model is implemented in a spreadsheet environment, and procedures are automated through Visual Basic for Application. It is affordable, but dynamic and flexible software solution, relatively easy to implement and use. |
| No. | Instance 1: FOQ Ordering Policy | Case 1: Deterministic Demand | Case 2: Stochastic Demand |
|---|---|---|---|
| 1 | Lead time (month) | 5 | 5 |
| 2 | Planned average level of stock (unit) | 63,000.00 | 63,000.00 |
| 3 | Security stock (unit) | 25,200.00 | 25,200.00 |
| 4 | Max level of stock T = 24 months (unit) | 70,400.00 | 70,472.00 |
| 5 | Average level of stock T = 24 months (unit) | 45,595.00 | 45,646.00 |
| 6 | Total number of stock outs | 5 | 5 |
| 7 | Total number of launched orders | 14 | 14 |
| 8 | Total number of received orders | 11 | 11 |
| 9 | max (J1) = (2)–(5) | 17,405.00 | 17,354.00 |
| 10 | min (J2) = (6) | 5 | 5 |
| No. | Instance 2: LFL Ordering Policy | Case 1: Deterministic Demand | Case 2: Stochastic Demand |
|---|---|---|---|
| 1 | Lead time (month) | 5 | 5 |
| 2 | Planned average level of stock (unit) | 63,000.00 | 63,000.00 |
| 3 | Security stock (unit) | 25,200.00 | 25,200.00 |
| 4 | Max level of stock T = 24 months (unit) | 94,600.00 | 94,599.00 |
| 5 | Average level of stock T = 24 months (unit) | 59,979.00 | 59,967.00 |
| 6 | Total number of stock outs | 5 | 5 |
| 7 | Total number of launched orders | 10 | 10 |
| 8 | Total number of received orders | 7 | 7 |
| 9 | max (J1) = (2)–(5) | 3021.00 | 3033.00 |
| 10 | min (J2) = (6) | 5 | 5 |
| No. | Parameters | Instance 1: FOQ Ordering Policy Case 1: Deterministic Demand | Instance 2: LFL Ordering Policy Case 1: Deterministic Demand | (Instance 1–Instance 2) |
|---|---|---|---|---|
| 1 | Lead time (month) | 5 | 5 | 0 |
| 2 | Planned average level of stock (unit) | 63,000.00 | 63,000.00 | 0 |
| 3 | Security stock (unit) | 25,200.00 | 25,200.00 | 0 |
| 4 | Max level of stock T = 24 months (unit) | 70,400.00 | 94,600.00 | 24,200.00 |
| 5 | Average level of stock T = 24 months (unit) | 45,595.00 | 59,979.00 | 14,384.00 |
| 6 | Total number of stock outs | 5 | 5 | 0 |
| 7 | Total number of launched orders | 14 | 10 | −4 |
| 8 | Total number of received orders | 11 | 7 | −4 |
| 9 | max (J1) = (2)–(5) | 17,405.00 | 3021.00 | −14,384.00 |
| 10 | min (J2) = (6) | 5 | 5 | 0 |
| No. | Parameters | Instance 1: FOQ Ordering Policy Case 2: Stochastic Demand | Instance 2: LFL Ordering Policy Case 2: Stochastic Demand | (Instance 1–Instance 2) |
|---|---|---|---|---|
| 1 | Lead time (month) | 5 | 5 | 0 |
| 2 | Planned average level of stock (unit) | 63,000.00 | 63,000.00 | 0 |
| 3 | Security stock (unit) | 25,200.00 | 25,200.00 | 0 |
| 4 | Max level of stock T = 24 months (unit) | 70,472.00 | 94,599.00 | 24,127.00 |
| 5 | Average level of stock T = 24 months (unit) | 45,646.00 | 59,967.00 | 14,321.00 |
| 6 | Total number of stock outs | 5 | 5 | 0 |
| 7 | Total number of launched orders | 14 | 10 | −4 |
| 8 | Total number of received orders | 11 | 7 | −4 |
| 9 | max (J1) = (2)–(5) | 17,354.00 | 3033.00 | −14,321.00 |
| 10 | min (J2) = (6) | 5 | 5 | 0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Antic, S.; Djordjevic Milutinovic, L.; Lisec, A. Dynamic Discrete Inventory Control Model with Deterministic and Stochastic Demand in Pharmaceutical Distribution. Appl. Sci. 2022, 12, 1536. https://doi.org/10.3390/app12031536
Antic S, Djordjevic Milutinovic L, Lisec A. Dynamic Discrete Inventory Control Model with Deterministic and Stochastic Demand in Pharmaceutical Distribution. Applied Sciences. 2022; 12(3):1536. https://doi.org/10.3390/app12031536
Chicago/Turabian StyleAntic, Slobodan, Lena Djordjevic Milutinovic, and Andrej Lisec. 2022. "Dynamic Discrete Inventory Control Model with Deterministic and Stochastic Demand in Pharmaceutical Distribution" Applied Sciences 12, no. 3: 1536. https://doi.org/10.3390/app12031536
APA StyleAntic, S., Djordjevic Milutinovic, L., & Lisec, A. (2022). Dynamic Discrete Inventory Control Model with Deterministic and Stochastic Demand in Pharmaceutical Distribution. Applied Sciences, 12(3), 1536. https://doi.org/10.3390/app12031536