
Different Types of Continuous Track Irregularities as Sources of Train-Induced Ground Vibration and the Importance of the Random Variation of the Track Support

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
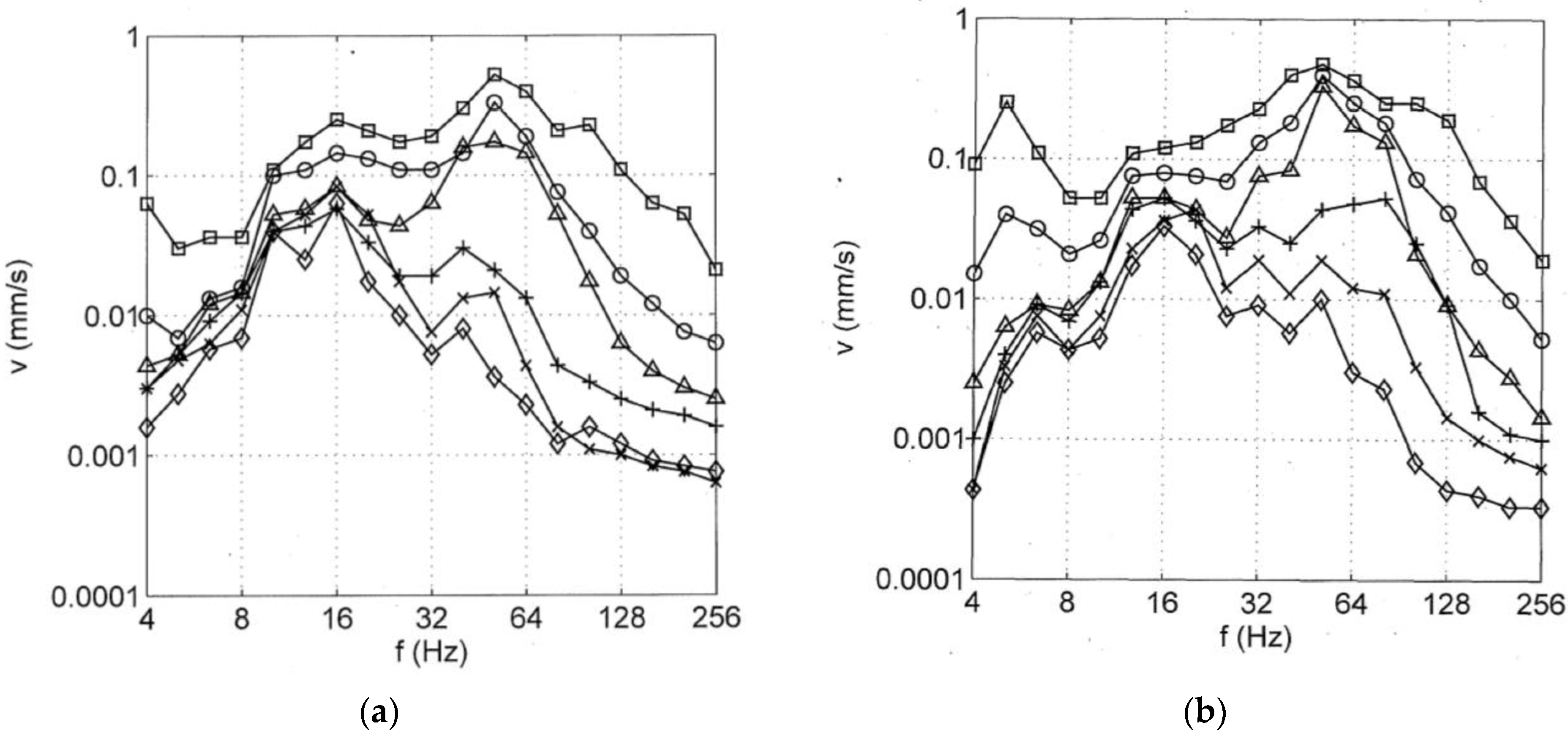
2. Experimental Motivation by the Dominant Frequency Range of Railway-Induced Ground Vibration
3. Frequency Domain Methods of Calculation
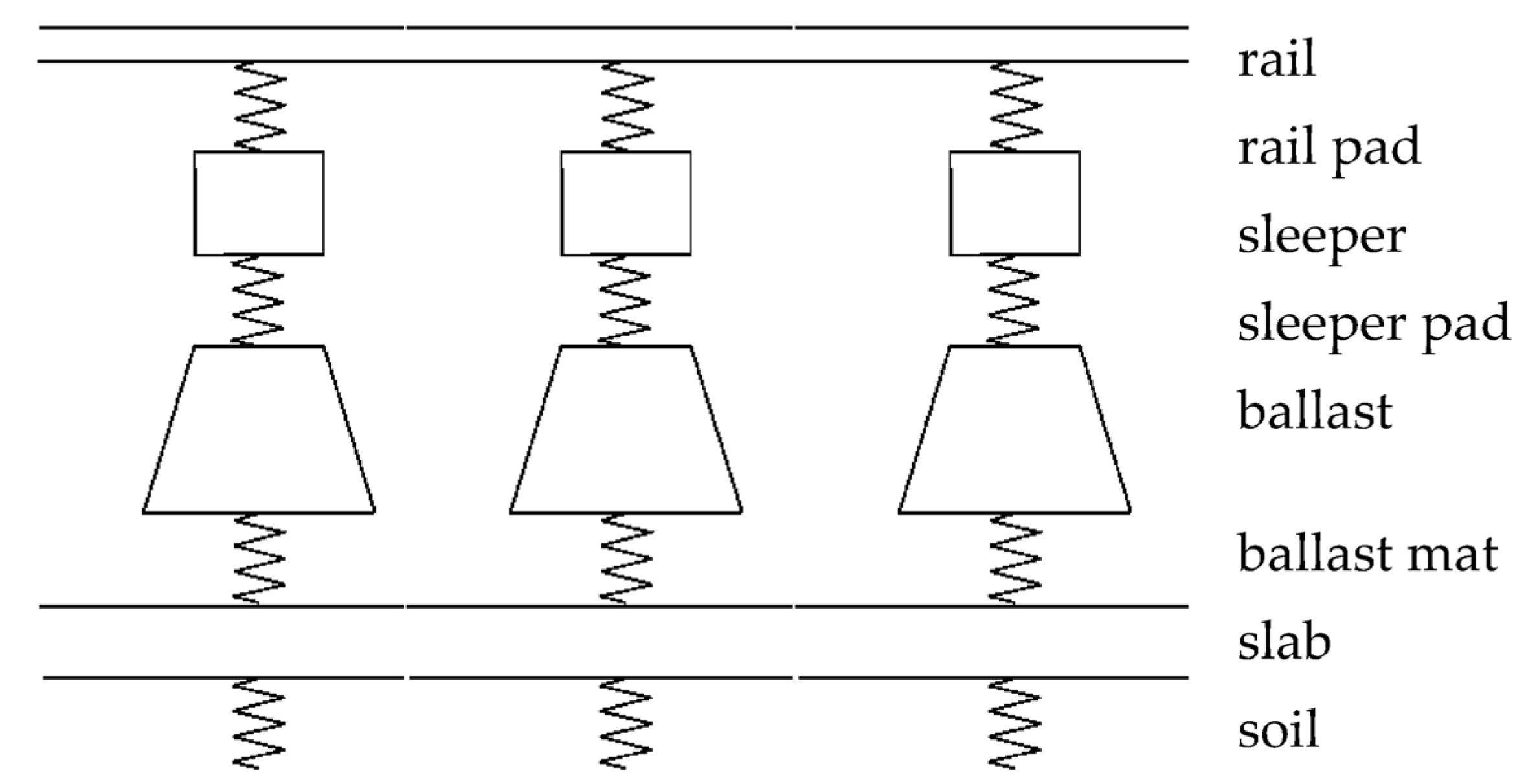
3.1. Simple Vehicle and Multi-Beam-on-Soil Track
3.2. The Vehicle-Track Transfer Functions
3.3. Irregularities at the Vehicle-Track Interface
3.4. Irregularities of the Track Support and Track Filtering
3.4.1. Geometric Irregularities of the Track Support
3.4.2. Random Variation of the Track Support Stiffness
3.5. Superposition of Axle Pulses from Passing Trains
3.5.1. Regular Track Support
3.5.2. Randomly Varying Track Support
4. Theoretical Results
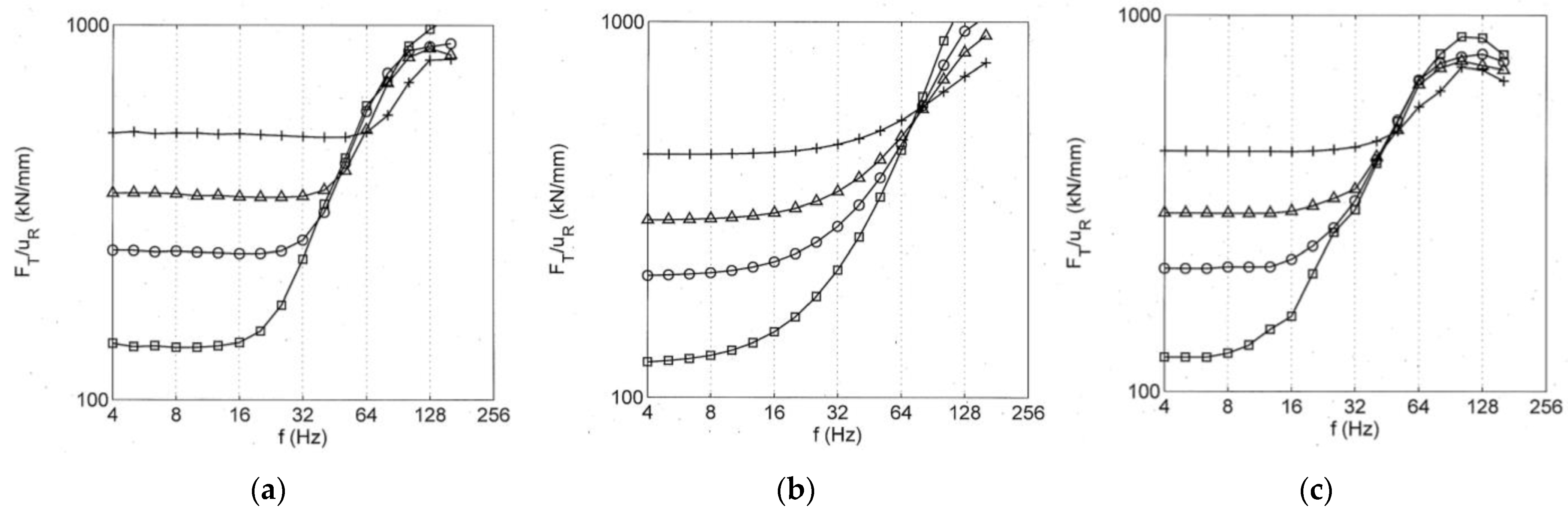
4.1. Transfer Functions of the Vehicle-Track Interaction
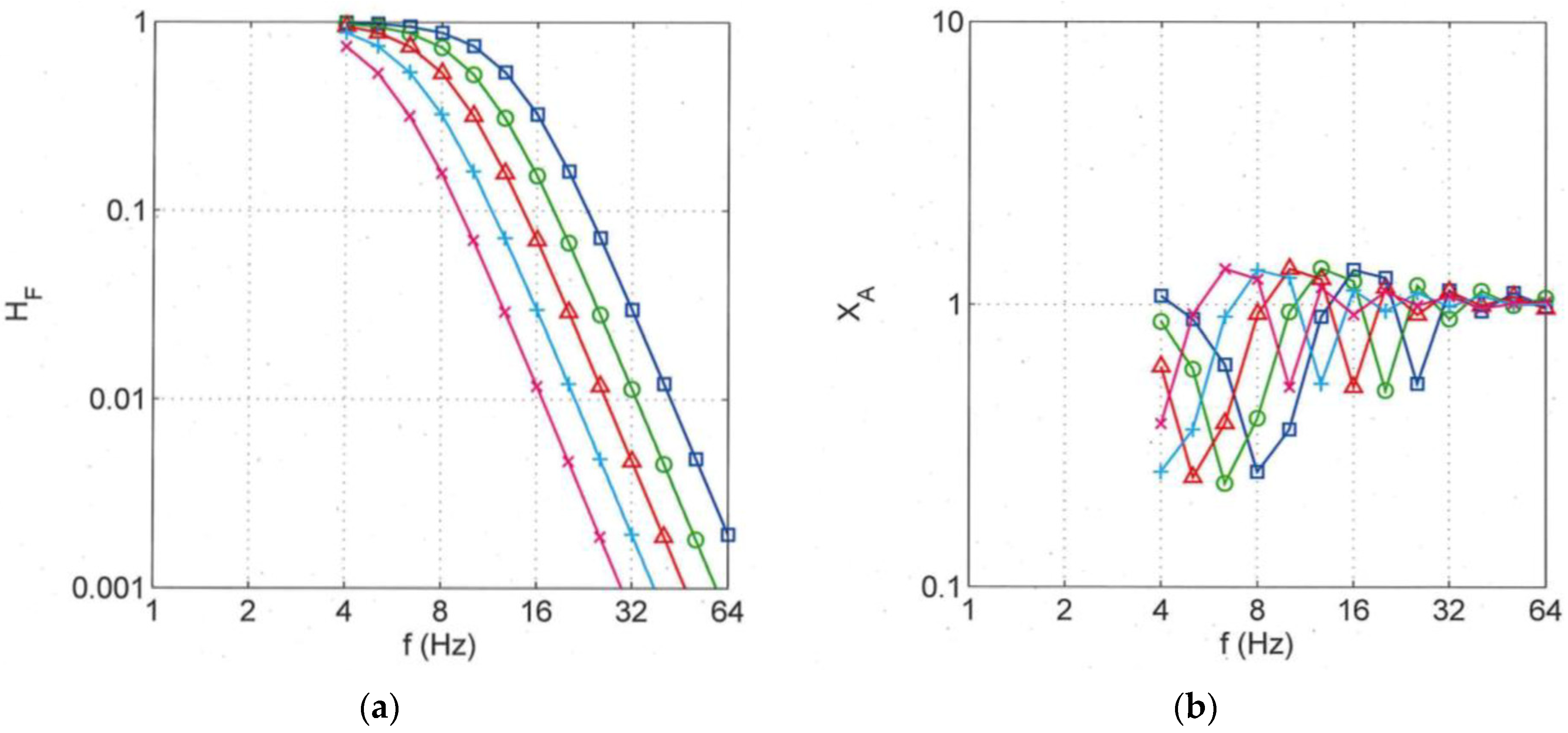
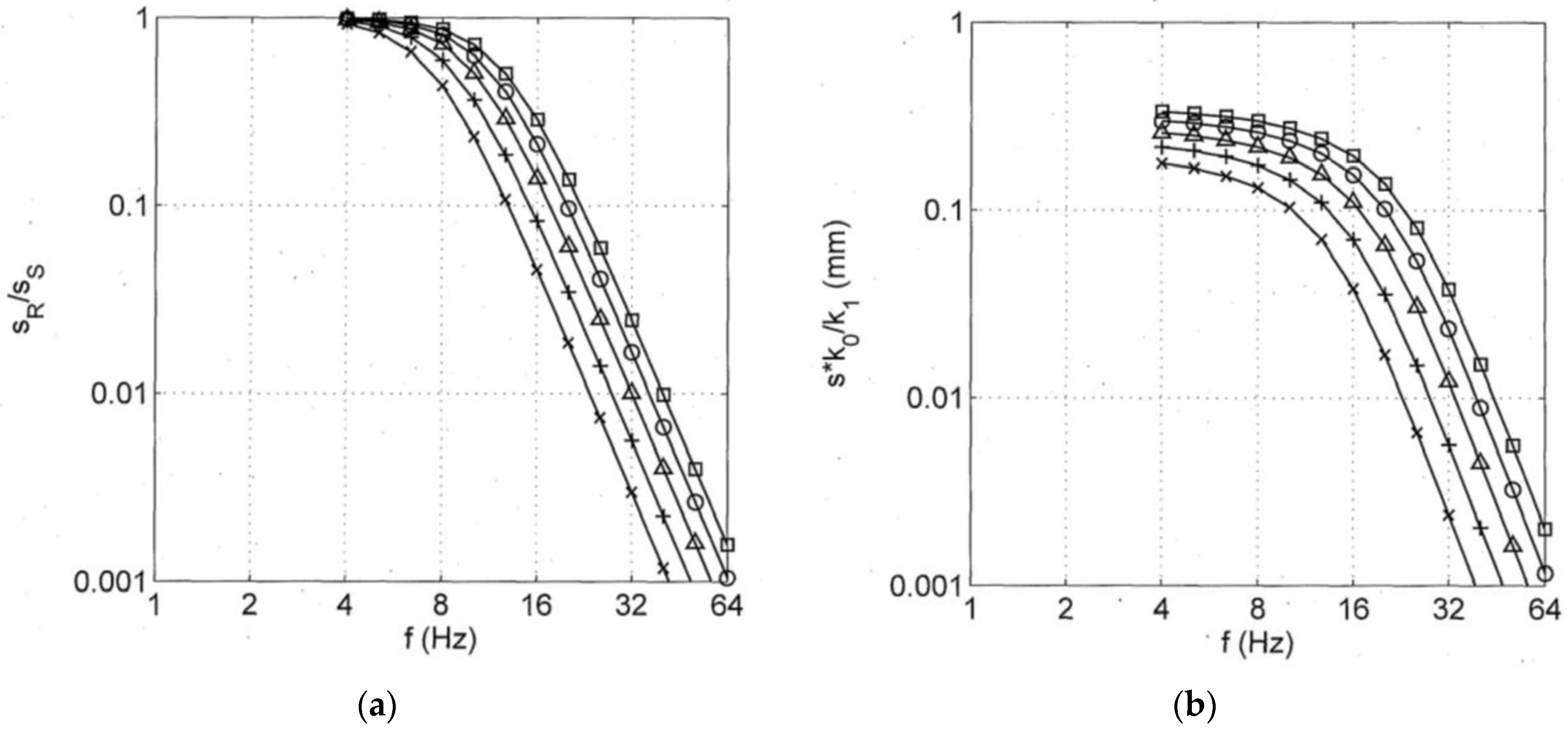
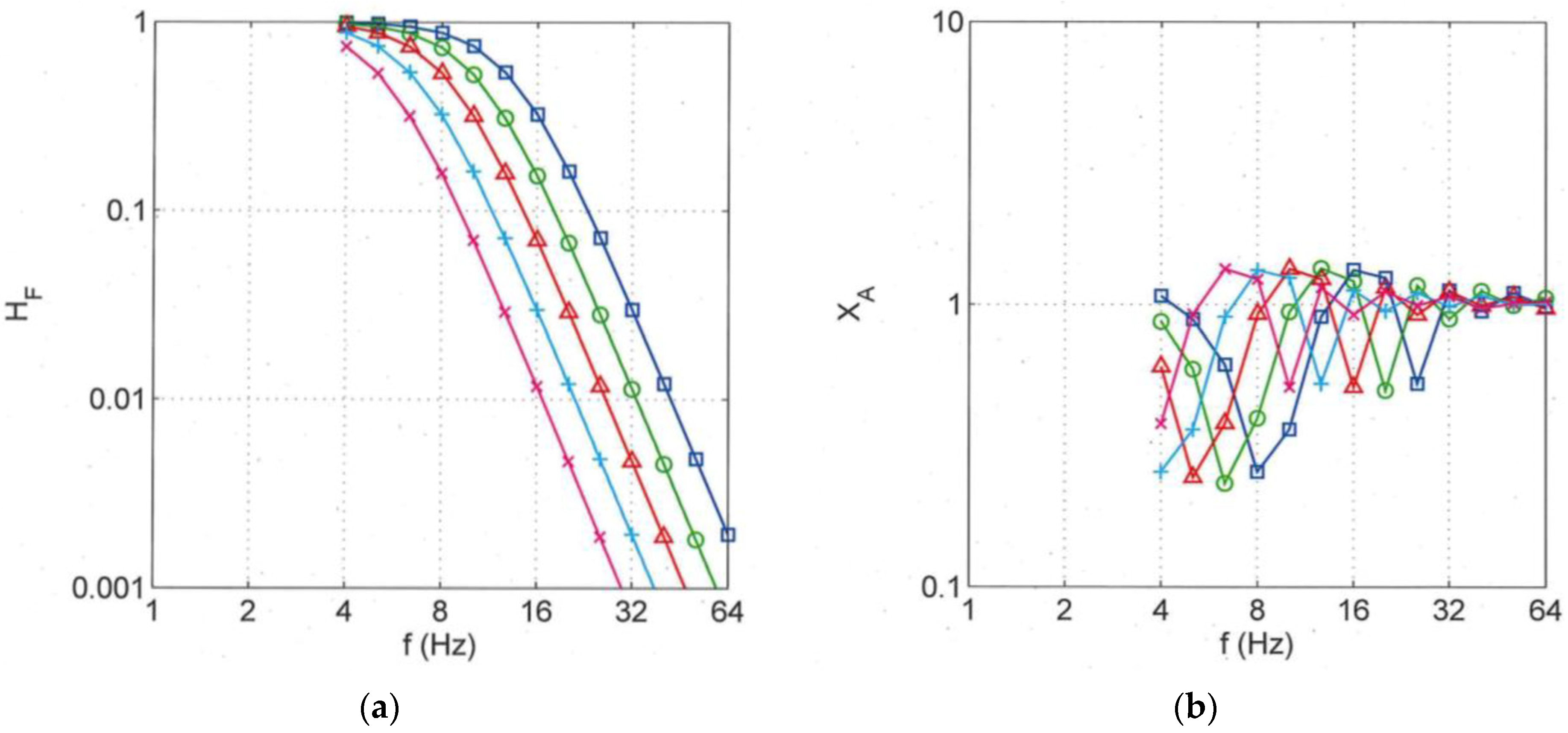
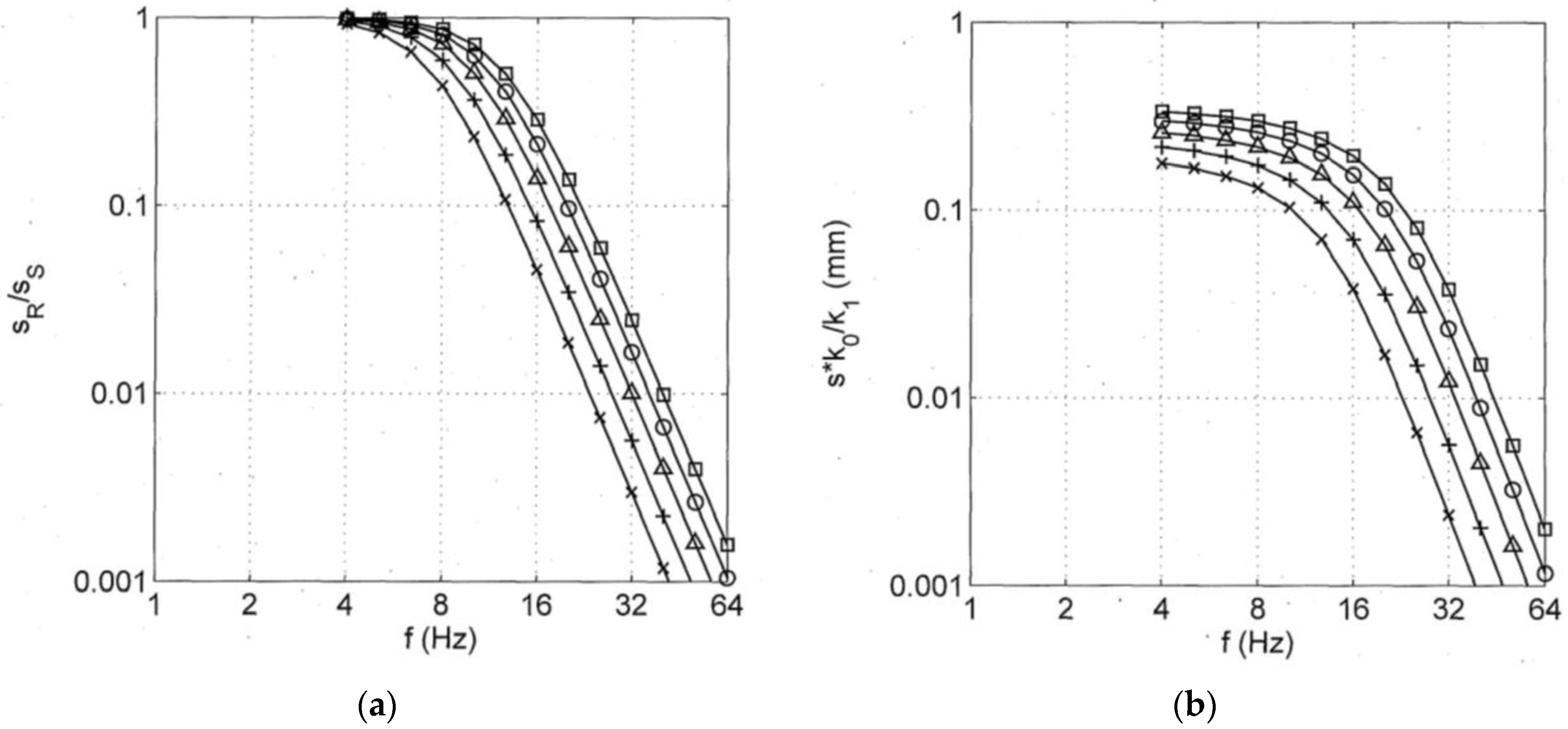
4.2. Transfer Functions of the Track Filtering
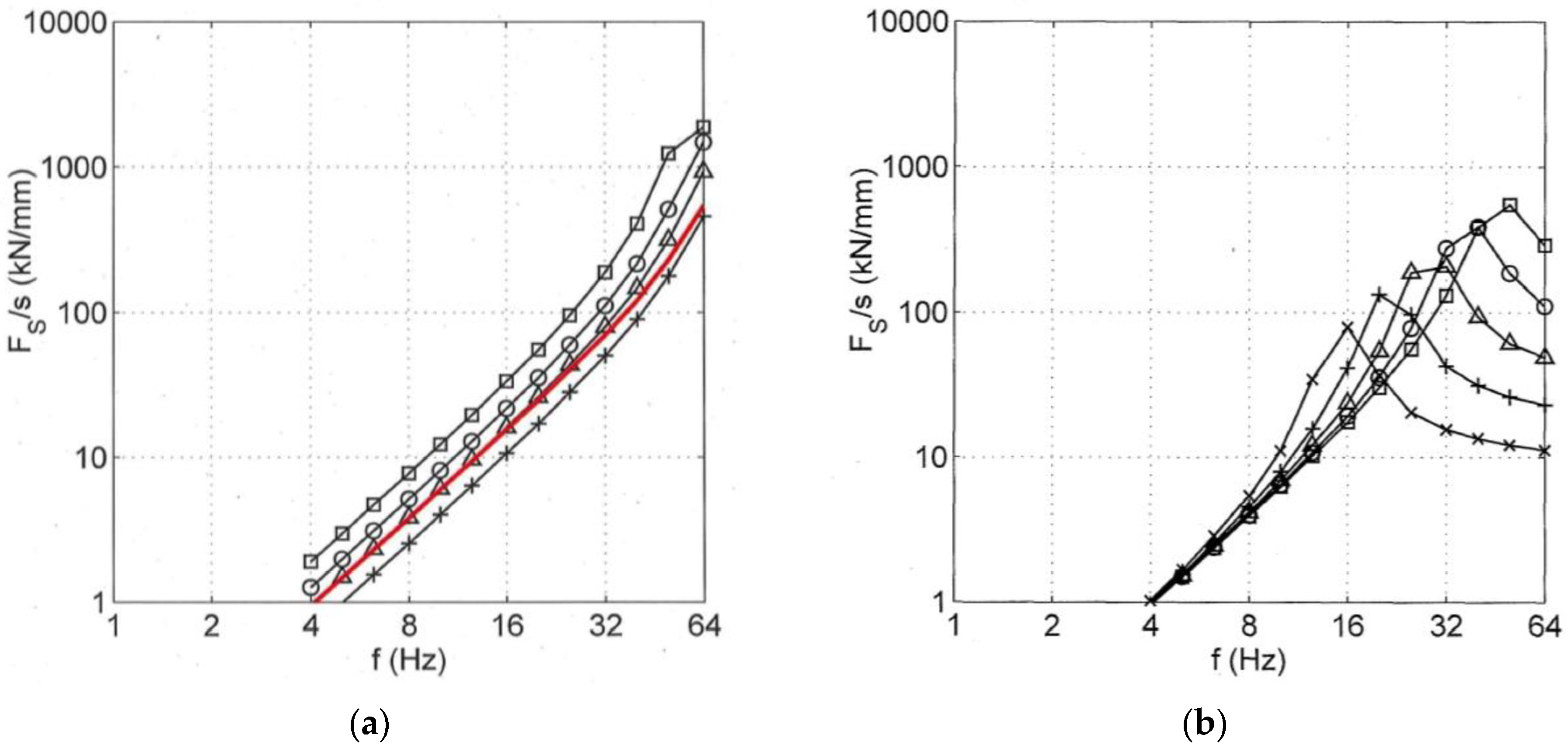
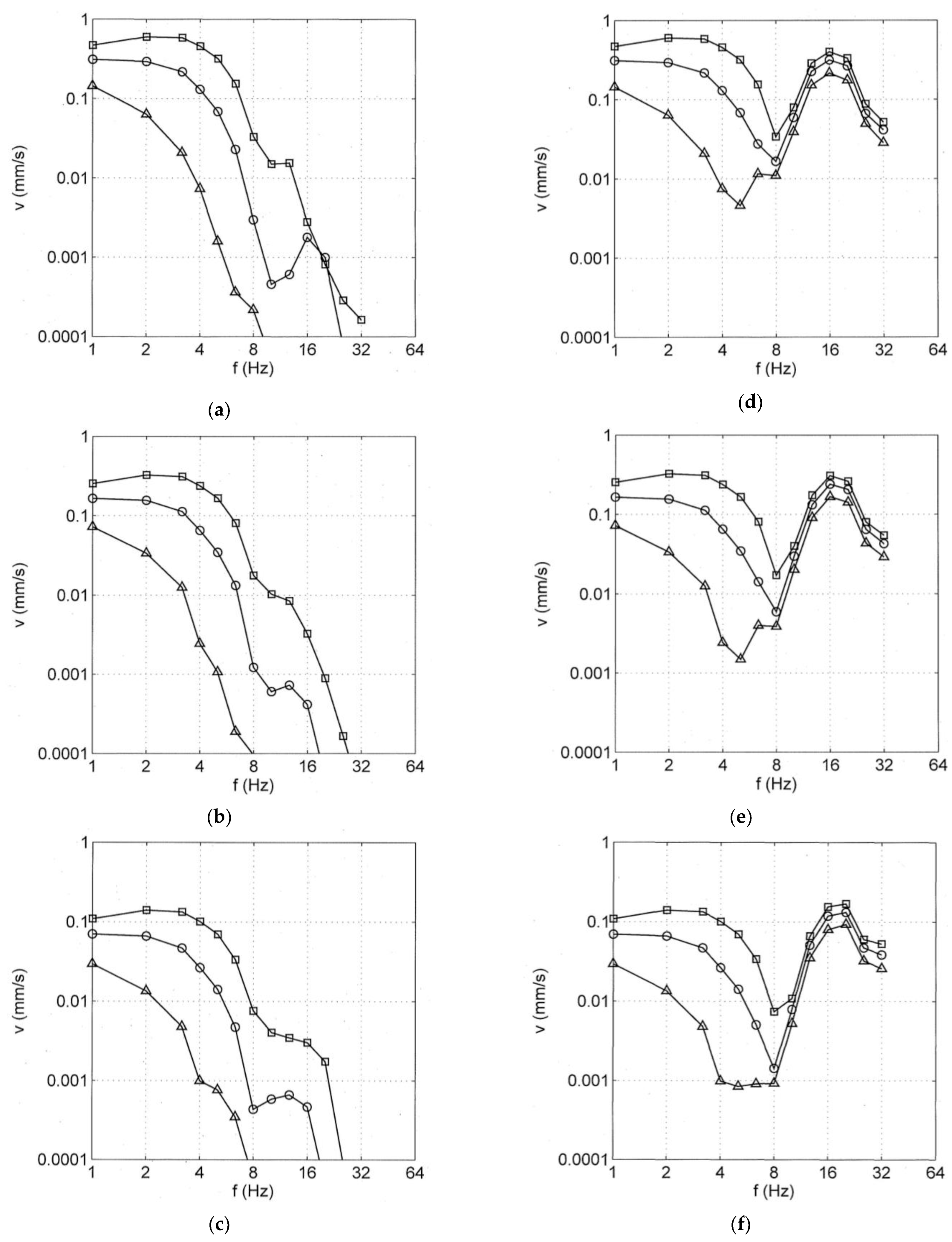
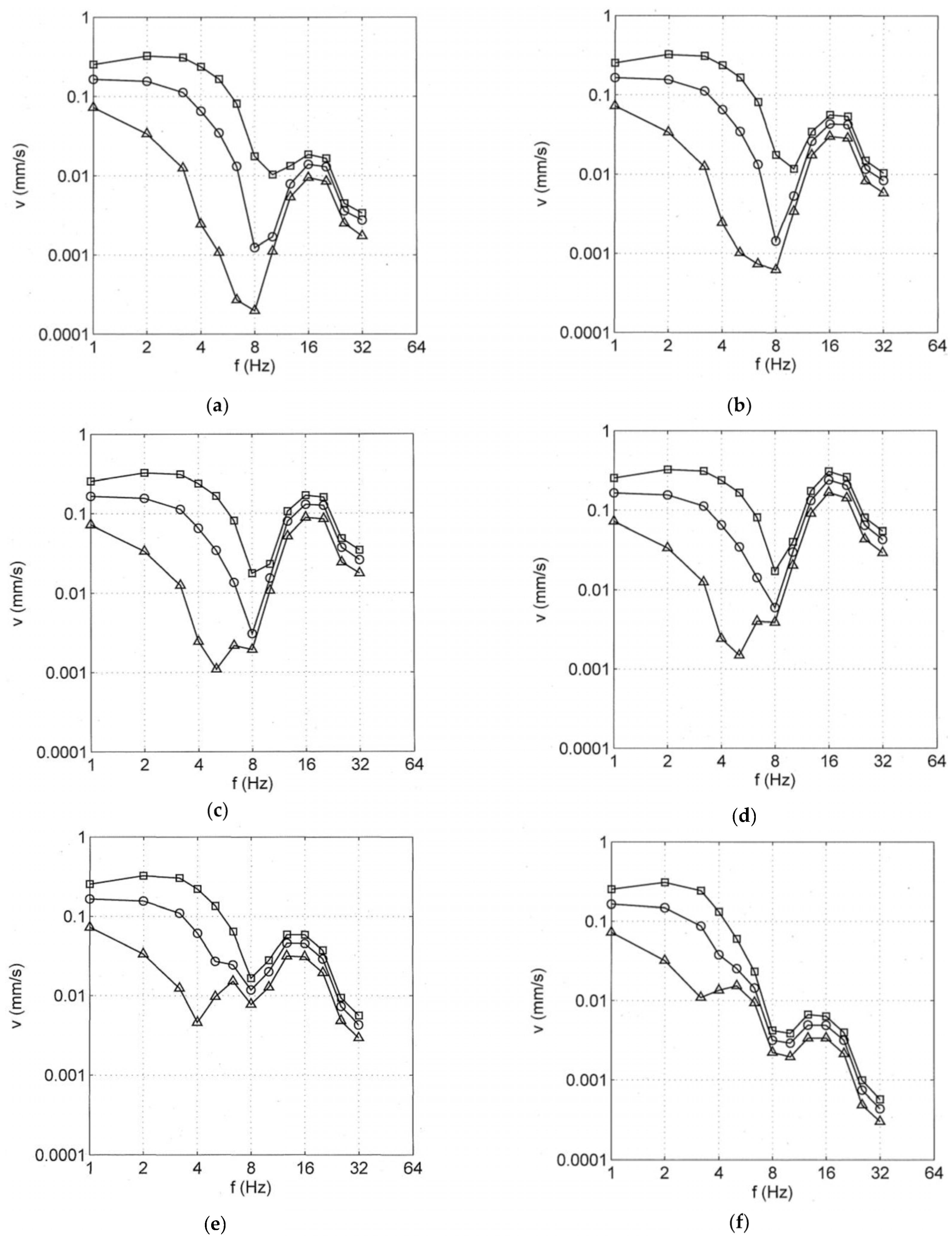
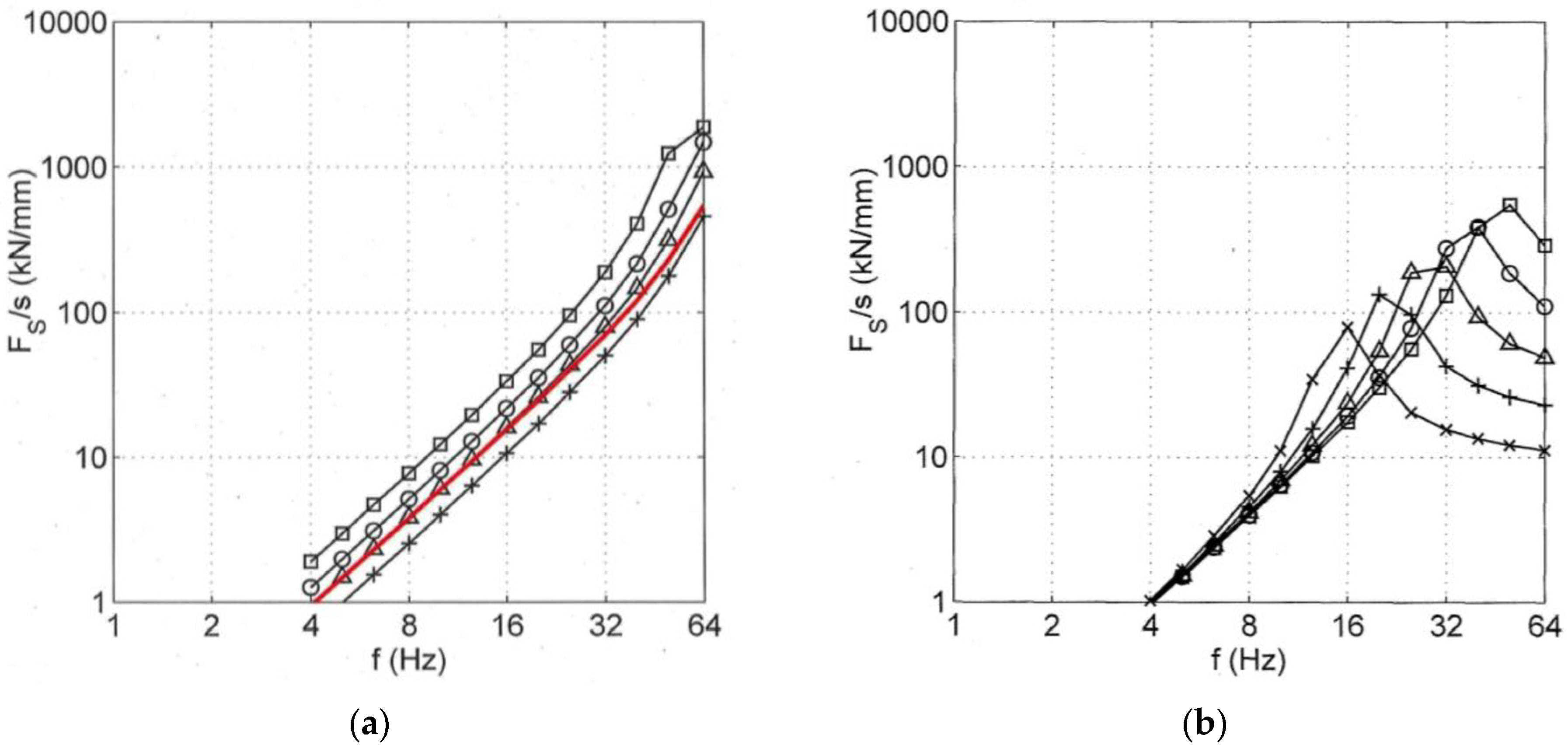
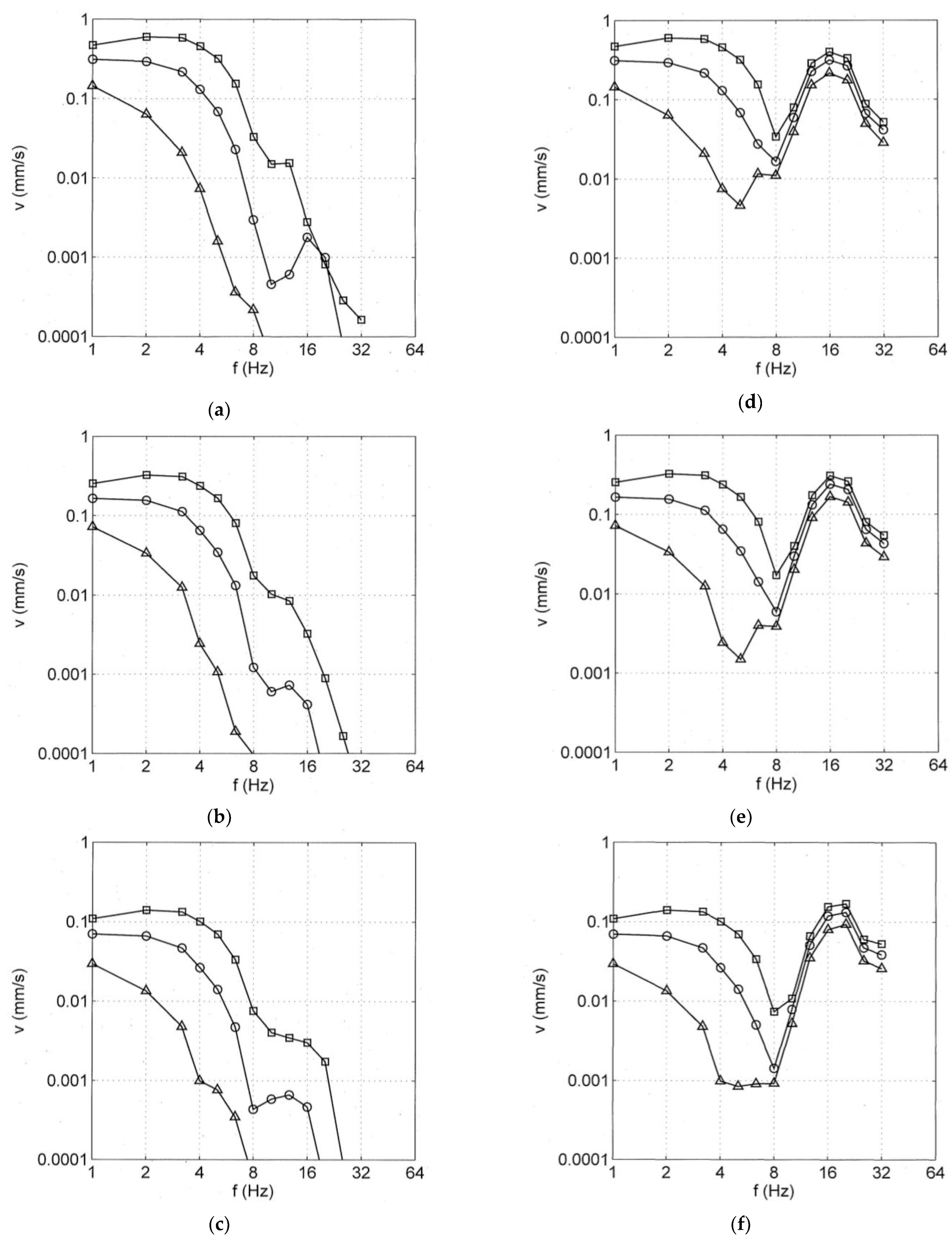
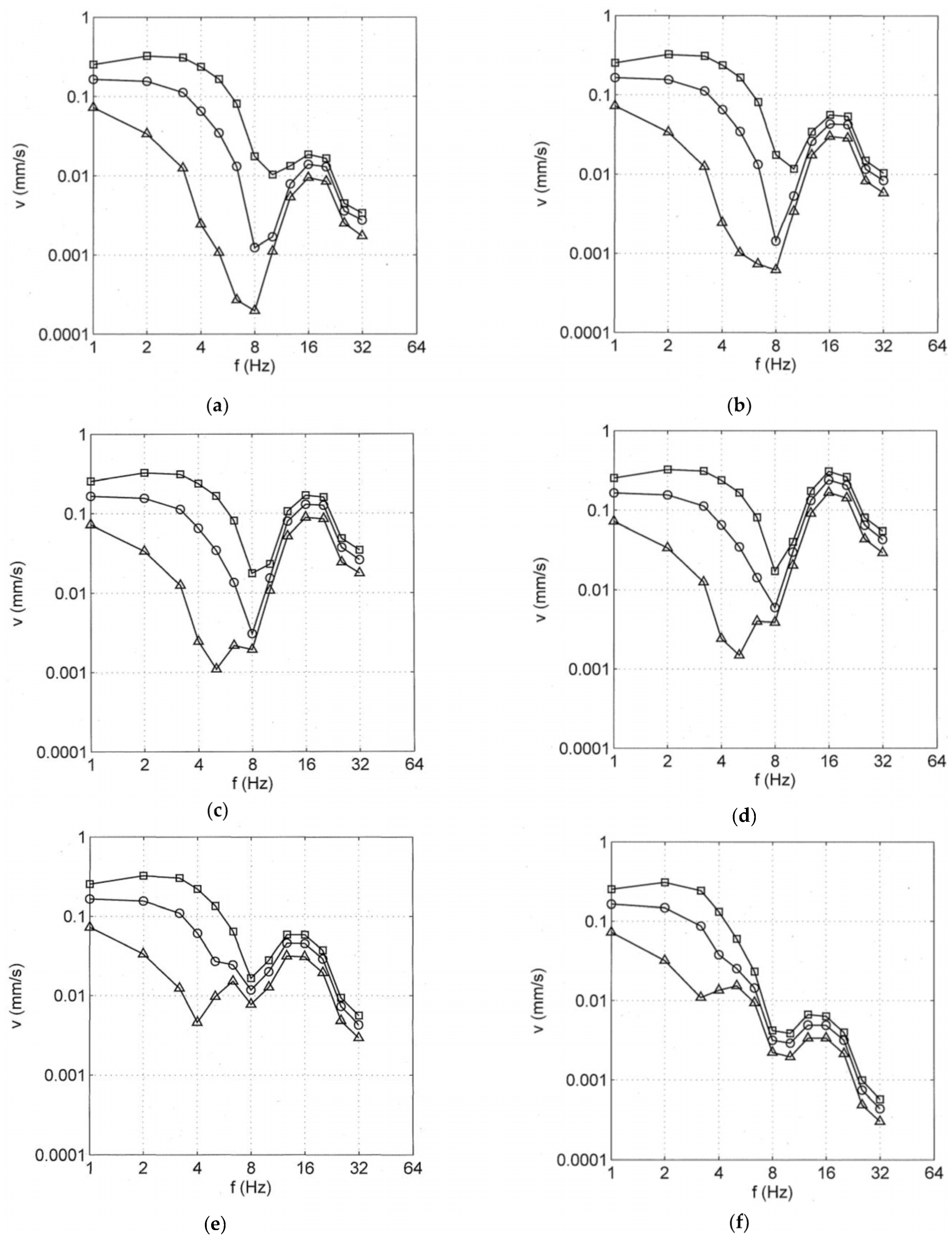
4.3. Quasi-Static Ground Response
4.4. The Effect of Axle Pulses on a Randomly Varying Track Support Stiffness
5. Calculated and Measured Results at a Specific Site
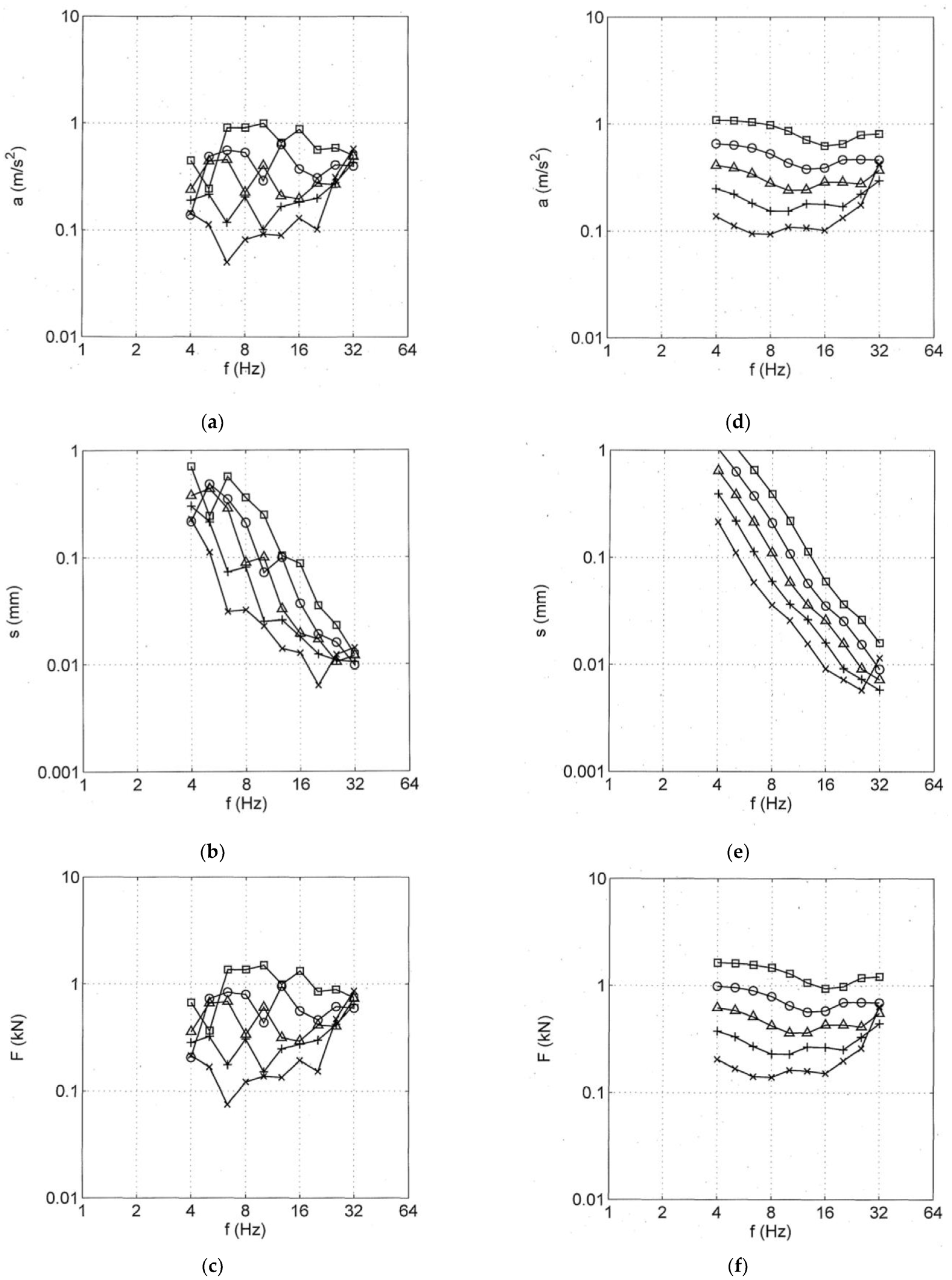
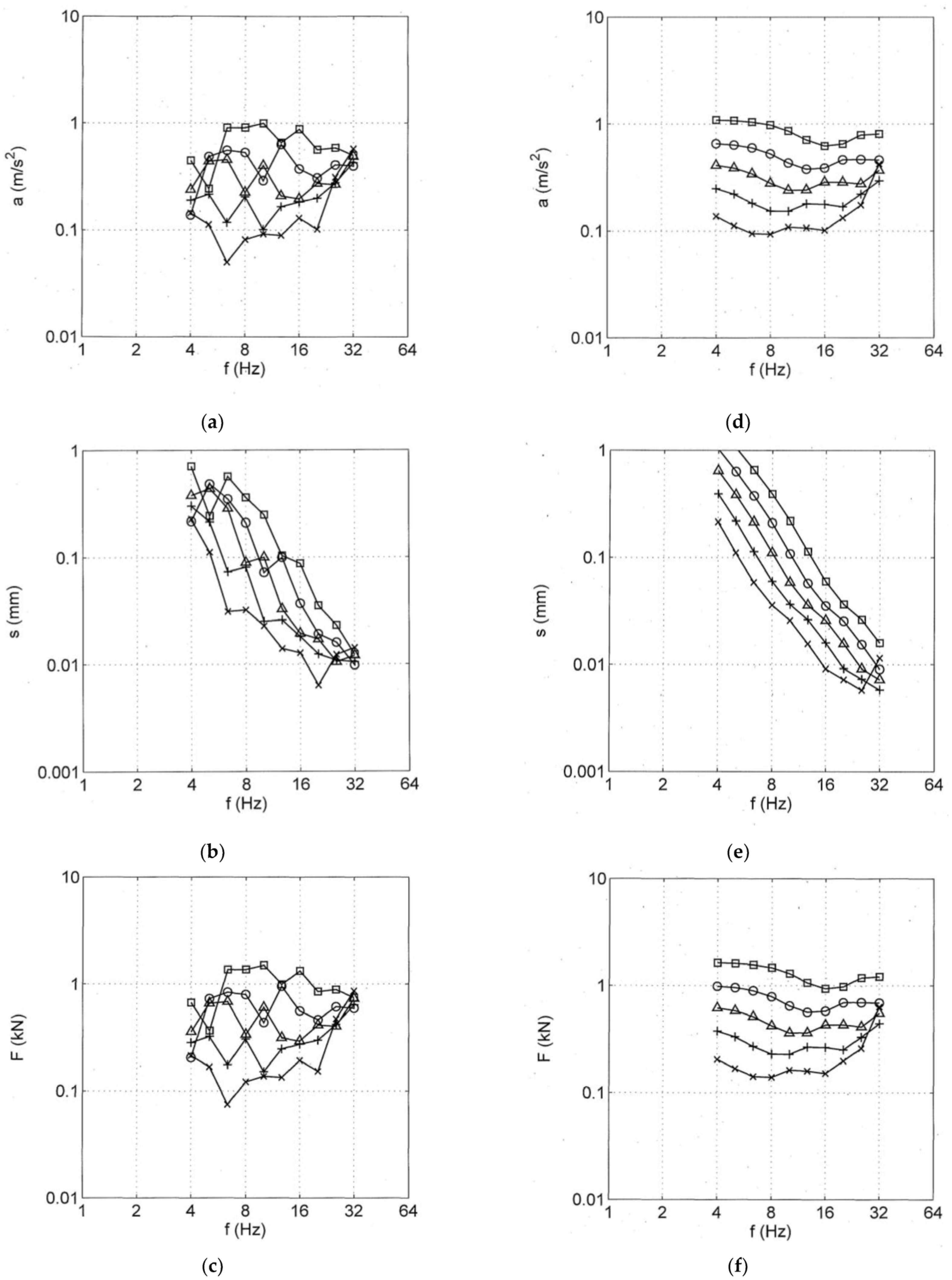
5.1. Wheelset Accelerations from Axle-Box Measurements and Corresponding Irregularities and Forces
5.2. Measured and Calculated Transfer Functions of the Soil
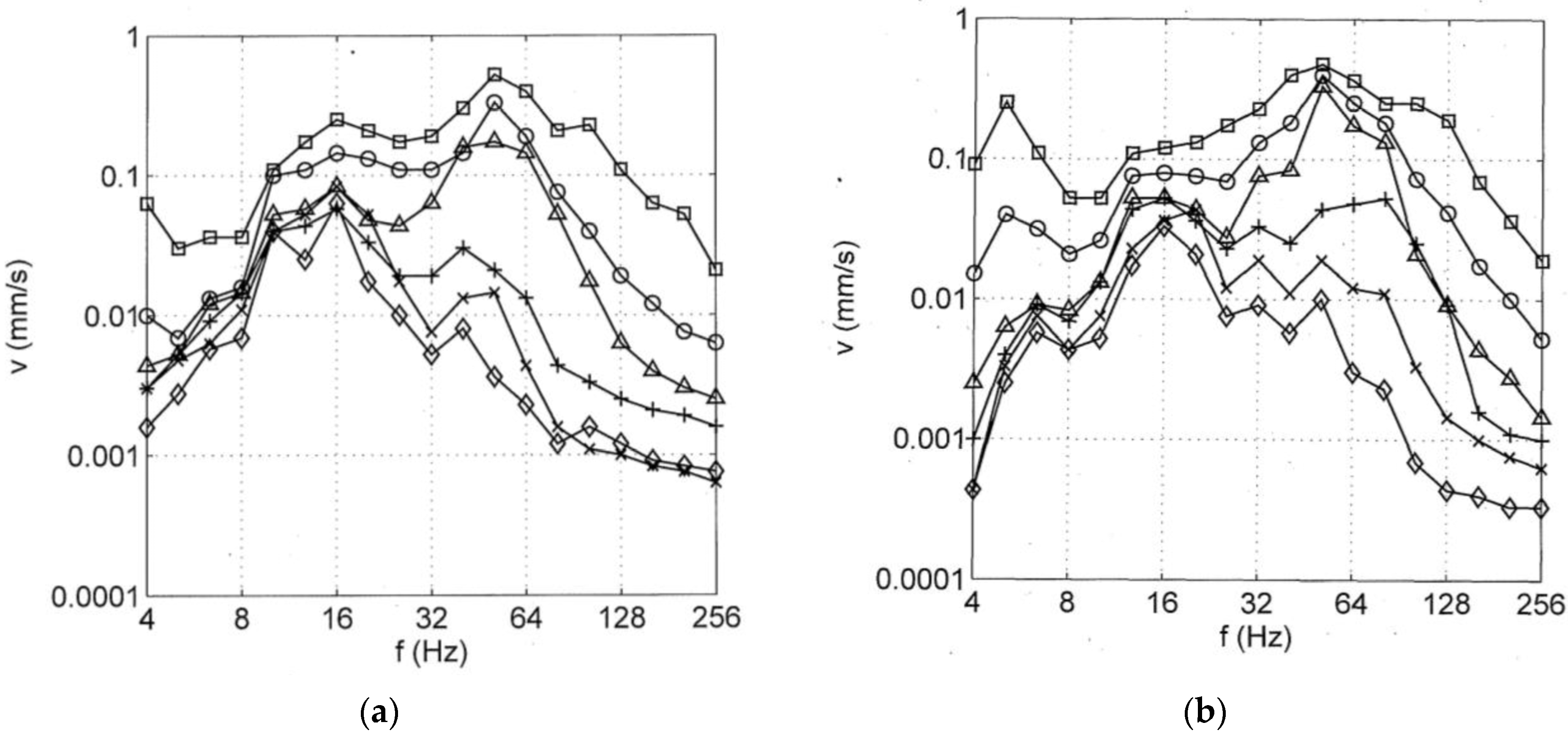
5.3. Ground Vibrations from Static or Dynamic Axle Loads and from Measurement
6. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| a | amplitude vector |
| b | width of the track |
| C | damping matrix of the multi-beam track model |
| df | frequency step |
| dfT | one-third octave frequency band |
| dt | time step |
| dy | load step |
| e1 | base vector (top of the track) |
| en | base vector (bottom of the track) |
| EIj | bending stiffness of track beam j |
| EI | matrix of bending stiffnesses |
| f | frequency |
| fT | one-third octave frequency |
| f0 | cut-off frequency of the track |
| F | force, axle load |
| F′ | force per track length |
| F0 | static axle load |
| FS | force on the soil |
| FT | force on the track |
| F′T | force vector (forces on different track beams) |
| h | height of the soil layer |
| Hzz | transfer function of the homogeneous half-space in wavenumber domain |
| HH | transfer function of the homogeneous half-space in space domain |
| HF | filter function of the track |
| HkT | transfer function for the stiffness irregularity |
| HsT | transfer function for the stiffness variation of the track support |
| HS | transfer function of the soil for a point load |
| HSS | transfer function of the soil for a strip load |
| HT | force transfer of the track |
| HV | vehicle-track transfer function |
| HV* | vehicle-track transfer function for stiffness-induced irregularities |
| kP | stiffness of the sleeper pad |
| kR | stiffness of the rail pad |
| kS | dynamic stiffness of the track support |
| kS* | dynamic stiffness of the Winkler support |
| k0 | average static stiffness of the track support |
| k1 | stiffness variation of the track support |
| KT | dynamic stiffness of the track at the wheel-rail contact point |
| KV | dynamic stiffness of the vehicle at the wheel-rail contact point |
| K0 | average static stiffness of the track |
| K1 | stiffness variation of the track |
| K | stiffness matrix of the multi-beam track model |
| KS | dynamic stiffness matrix of the soil |
| KT | stiffness matrix of the track |
| KTS | stiffness matrix of the track-soil system |
| lB | half the distance between two axles in a bogie |
| mW | mass of the wheelset |
| mj’ | mass per length of track beam j |
| M | mass matrix |
| n | number of loading points |
| nB | number of bogies in a train |
| p | stress distribution across the track |
| q | percentage of the variation in the support stiffness |
| s | (geometric) irregularity |
| s* | equivalent irregularity |
| sD | equivalent displacement variation due to sleeper distance excitation |
| sR | irregularity at rail level |
| sS | irregularity at the track support |
| sW | irregularity of the wheel |
| t | time |
| tj | loading time of position j |
| t | stress vector |
| u | displacement vector |
| uR | displacement of the rail |
| uS | displacement of the track support |
| v | particle velocity (of the soil) |
| vS | shear wave velocity of the soil |
| vS1 | shear wave velocity of the layer |
| vS2 | shear wave velocity of underlying half-space |
| vT | train speed |
| X | axle-sequence spectrum of the train |
| XA | axle-sequence spectrum for two axles of a bogie |
| x | coordinate normal to the track |
| y | coordinate along the track |
| yj | coordinate of the loading point j |
| δ | Dirac function |
| λ | Wavelength |
| ξ | Wavenumber |
| ξx | wavenumber normal to the track |
| ξy | wavenumber along the track |
| ξV | wavenumber of the stiffness variation |
| ω | circular frequency |
Appendix A. Frequency-Wavenumber Domain Methods and Their Approximation for Dynamic Track and Soil Behaviour

References
- Berawi, A. Improving Railway Track Maintenance Using Power Spectral Density (PSD). Ph.D. Thesis, University of Porto, Porto, Potrugal, 2013. [Google Scholar]
- Hamid, A.; Rasmussen, K.; Baluja, M.; Yang, T. Analytical Description of Track Geometry Variations; Report for Federal Railroad Administration; ENSCO Inc.: Springfield, IL, USA, 1983. [Google Scholar]
- Esveld, C. Modern Railway Track; MRT-Productions: Duisburg, Germany, 1989. [Google Scholar]
- Auersch, L. Simultaneous measurements of the vehicle, track, and soil vibrations at a surface, bridge, and tunnel railway line. Shock. Vib. 2017, 2017, 1959286. [Google Scholar] [CrossRef] [Green Version]
- Takemiya, H. Ground vibrations alongside tracks induced by high-speed trains: Prediction and mitigation. In Noise and Vibration from High-Speed Trains; Krylov, V., Ed.; Thomas Telford: London, UK, 2001; pp. 347–391. [Google Scholar]
- Sheng, X.; Jones, C.; Thompson, D. A theoretical model for ground vibration from trains generated by vertical track irregularities. J. Sound Vib. 2004, 272, 937–965. [Google Scholar] [CrossRef]
- Lombaert, G.; Degrande, G.; Kogut, J.; François, S. The experimental validation of a numerical model for the prediction of railway induced vibrations. J. Sound Vib. 2006, 297, 512–535. [Google Scholar] [CrossRef]
- Maldonado, M. Vibrations Dues au Passage d’un Tramway—Mesures Expérimentales et Simulations Numériques. Ph.D. Thesis, Ecole Centrale de Nantes, Nantes, France, 2009. [Google Scholar]
- Ju, S.; Lin, H. Experimentally investigating finite element accuracy for ground vibrations induced by high-speed trains. Eng. Struct. 2008, 30, 733–746. [Google Scholar] [CrossRef]
- Kouroussis, G. Modélisation des Effets Vibratoirs du Traffic Ferroviaire sur L’environnement. Ph.D. Thesis, University of Mons, Mons, Belgium, 2009. [Google Scholar]
- Connolly, D. Ground Borne Vibrations from High-Speed Trains. Ph.D. Thesis, University of Edinburgh, Edinburgh, UK, 2013. [Google Scholar]
- Ekevid, T.; Wiberg, N. Wave propagation related to high-speed train: A scaled boundary FE-approach for unbounded domains. Comput. Methods Appl. Mech. Eng. 2002, 191, 3947–3964. [Google Scholar] [CrossRef]
- Galvin, P.; Dominguez, J. Experimental and numerical analyses of vibrations induced by high-speed trains on the Cordoba-Malaga line. Soil Dyn. Earthq. Eng. 2009, 29, 641–657. [Google Scholar] [CrossRef]
- Romero, A. Predicción, Medida Experimental y Evaluación de las Vibraciones Producidas por el Tráfico Ferroviario. Ph.D. Thesis, University of Sevilla, Sevilla, Spain, 2012. [Google Scholar]
- Yang, Y.; Hung, H. A 2.5D finite/infinite finite element approach for modelling viscoelastic bodies subjected to moving loads. Int. J. Numer. Methods Eng. 2001, 51, 1317–1336. [Google Scholar] [CrossRef]
- Galvin, P.; Francois, S.; Schevenels, M.; Bongini, E.; Degrande, G.; Lombaert, G. A 2.5D coupled FE-BE model for the prediction of railway induced vibrations. Soil Dyn. Earthq. Eng. 2010, 30, 1500–1512. [Google Scholar] [CrossRef] [Green Version]
- Alves Costa, P. Vibrações do Sistema Via-Maciço Induzidas por Tráfego Ferroviário—Modelação Numérica e Validação Experimental. Ph.D. Thesis, University of Porto, Porto, Portugal, 2011. [Google Scholar]
- Krylov, V. Ground vibration boom from high-speed trains: Prediction and reality. Acoust. Bull. 1998, 23, 15–22. [Google Scholar]
- Triepaischajonsak, N.; Thompson, D.; Jones, C.; Ryue, J.; Priest, J. Ground vibration from trains: Experimental parameter characterisation and validation of a numerical model. Rail Rapid Transp. 2011, 225, 140–153. [Google Scholar] [CrossRef]
- Auersch, L. Theoretical and experimental excitation force spectra for railway induced ground vibration—Vehicle-track soil interaction, irregularities and soil measurements. Veh. Syst. Dyn. 2010, 48, 235–261. [Google Scholar] [CrossRef]
- Verheijen, E. A survey on roughness measurement. J. Sound Vib. 2006, 293, 784–794. [Google Scholar] [CrossRef]
- Johansson, A. Out-of-Round Railway Wheels—Literature Survey, Field Tests and Numerical Simulations. Ph.D. Thesis, University of Göteborg, Gothenburg, Sweden, 2003. [Google Scholar]
- Hunt, H. Types of rail roughness and the selection of vibration isolation measures. In Noise and Vibration Mitigation for Rail Transportation Systems; Notes on Numerical Fluid Mechanics and Multidisciplinary Design; Springer: Berlin/Heidelberg, Germany, 2008; Volume 99, pp. 341–347. [Google Scholar]
- Auersch, L. Excitation of ground vibration due to the passage of trains over a track with trackbed irregularities and a varying support stiffness. Veh. Syst. Dyn. 2015, 53, 1–29. [Google Scholar] [CrossRef]
- Verachtert, R.; Hunt, H.; Hussein, M.; Degrande, G. Changes of perceived unevenness by in-track vibration countermeasures in slab track. Eur. J. Mech. A/Solids 2017, 65, 40–58. [Google Scholar] [CrossRef]
- Auersch, L. Parametric excitation of rail-wheel-system: Calculation of vehicle–track–subsoil-dynamics and experimental results of the high-speed train Intercity experimental. Arch. Appl. Mech. 1990, 60, 141–156. (In German) [Google Scholar]
- Nielsen, J.; Igeland, A. Vertical dynamic interaction between train and track—Influence of wheel and track imperfections. J. Sound Vib. 1995, 187, 825–839. [Google Scholar] [CrossRef]
- Fröhling, R. Deterioration of Railway Track Due to Dynamic Vehicle Loading and Spatially Varying Track Stiffness. Ph.D. Thesis, University of Pretoria, Pretoria, South Africa, 1997. [Google Scholar]
- Oscarsson, J. Dynamic train-track interaction: Variability attributable to scatter in the track properties. Veh. Syst. Dyn. 2002, 37, 59–79. [Google Scholar] [CrossRef]
- Berggren, E. Railway Track Stiffness—Dynamic Measurements and Evaluation for Efficient Maintenance. Ph.D. Thesis, KTH Stockholm, Stockholm, Sweden, 2009. [Google Scholar]
- Auersch, L. The role of vehicle dynamics in train-induced ground vibrations and the detection of irregular axle-pulse responses due to a varying track stiffness. Rail Rapid Transit 2022, 236. accepted for publication. [Google Scholar]
- Auersch, L. Dynamics of the railway track and the underlying soil: The boundary-element solution, theoretical results and their experimental verification. Veh. Syst. Dyn. 2005, 43, 671–695. [Google Scholar] [CrossRef]
- Auersch, L. Static and dynamic behaviours of isolated and un-isolated ballast tracks using a fast wavenumber domain method. Arch. Appl. Mech. 2017, 87, 555–574. [Google Scholar] [CrossRef]
- Auersch, L. The excitation of ground vibration by rail traffic: Theory of vehicle–track–soil interaction and measurements on high-speed lines. J. Sound Vib. 2005, 284, 103–132. [Google Scholar] [CrossRef]
- Auersch, L. Wave propagation in layered soil: Theoretical solution in wavenumber domain and experimental results of hammer and railway traffic excitation. J. Sound Vib. 1994, 173, 233–264. [Google Scholar] [CrossRef]
- Sheng, X.; Jones, C.; Thompson, D. A comparison of a theoretical model for quasi-statically and dynamically induced environmental vibration from trains with measurements. J. Sound Vib. 2003, 267, 621–635. [Google Scholar] [CrossRef] [Green Version]
- Auersch, L. Ground vibration due to railway traffic—The calculation of the effects of moving static loads and their experimental verification. J. Sound Vib. 2006, 293, 599–610. [Google Scholar] [CrossRef]
- Lombaert, G.; Degrande, G. Ground-borne vibration due to static and dynamic axle loads of InterCity and high-speed trains. J. Sound Vib. 2009, 319, 1036–1066. [Google Scholar] [CrossRef]
- Auersch, L. Train induced ground vibrations: Different amplitude-speed relations for two layered soils. J. Rail Rapid Transit 2012, 226, 469–488. [Google Scholar] [CrossRef]
- Auersch, L. Fast trains and isolating tracks on inhomogeneous soils. In Ground Vibrations from High-Speed Railways: Prediction and Mitigation; Krylov, V., Ed.; ICE Publishing: London, UK, 2019; pp. 27–76. [Google Scholar]
- Degrande, G.; Schillemanns, L. Free field vibrations during the passage of a Thalys high-speed train at variable speed. J. Sound Vib. 2001, 247, 131–144. [Google Scholar] [CrossRef] [Green Version]
- Zhai, W.; Wei, K.; Song, X.; Shao, M. Experimental investigation into ground vibrations induced by very high speed trains on a non-ballasted track. Soil Dyn. Earthq. Eng. 2015, 72, 24–36. [Google Scholar] [CrossRef] [Green Version]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Auersch, L. Different Types of Continuous Track Irregularities as Sources of Train-Induced Ground Vibration and the Importance of the Random Variation of the Track Support. Appl. Sci. 2022, 12, 1463. https://doi.org/10.3390/app12031463
Auersch L. Different Types of Continuous Track Irregularities as Sources of Train-Induced Ground Vibration and the Importance of the Random Variation of the Track Support. Applied Sciences. 2022; 12(3):1463. https://doi.org/10.3390/app12031463
Chicago/Turabian StyleAuersch, Lutz. 2022. "Different Types of Continuous Track Irregularities as Sources of Train-Induced Ground Vibration and the Importance of the Random Variation of the Track Support" Applied Sciences 12, no. 3: 1463. https://doi.org/10.3390/app12031463
APA StyleAuersch, L. (2022). Different Types of Continuous Track Irregularities as Sources of Train-Induced Ground Vibration and the Importance of the Random Variation of the Track Support. Applied Sciences, 12(3), 1463. https://doi.org/10.3390/app12031463