
Remote and Proximal Sensing Techniques for Site-Specific Irrigation Management in the Olive Orchard




Abstract
1. Introduction
2. Materials and Methods
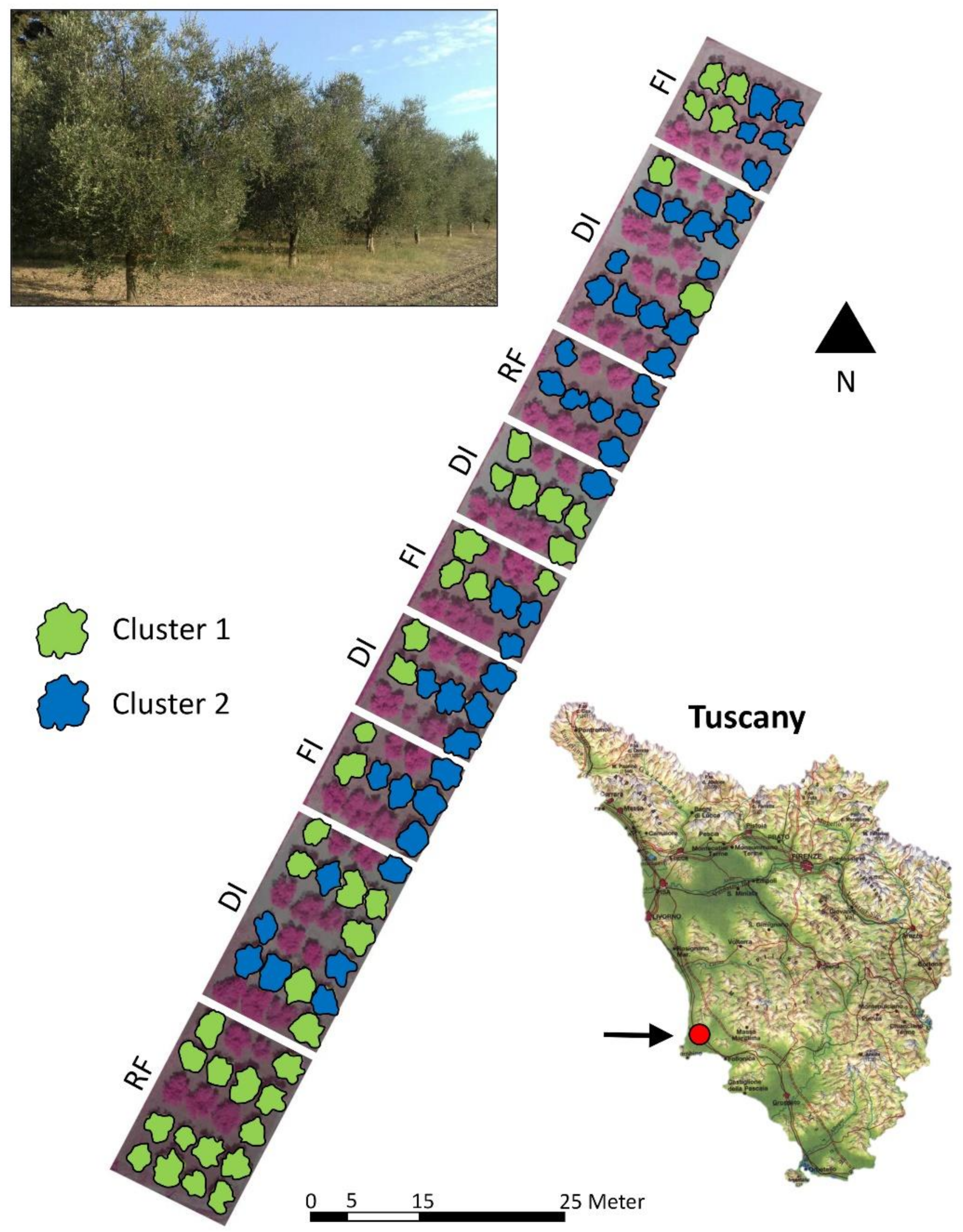
2.1. Plant Material and Site
2.2. Irrigation Management and Measurements
2.3. Multispectral Imagery Acquisition and Analysis
2.4. Proximal Soil Sensing and Soil Analysis
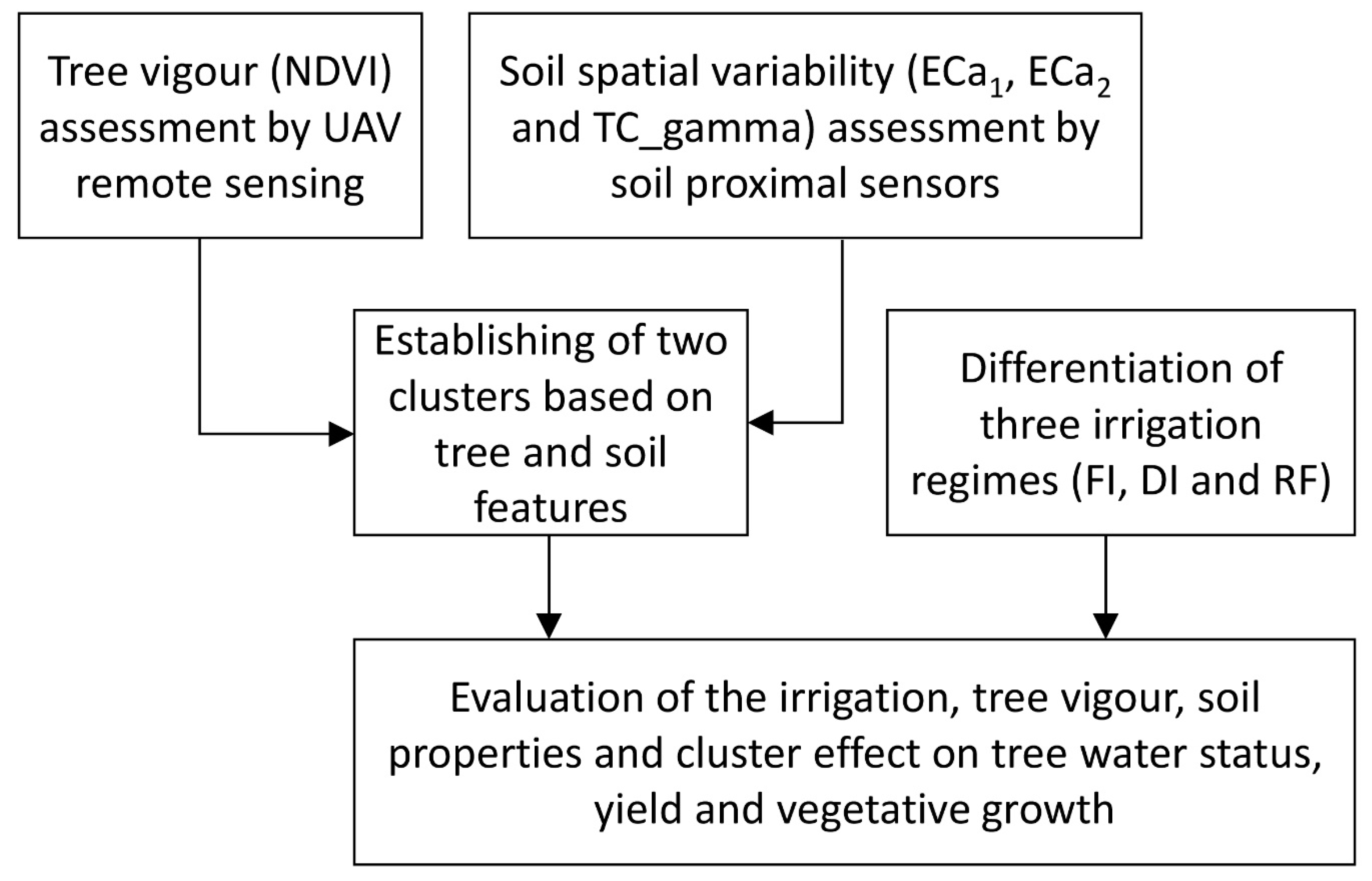
2.5. Experimental Design
2.6. Statistical Analysis
3. Results
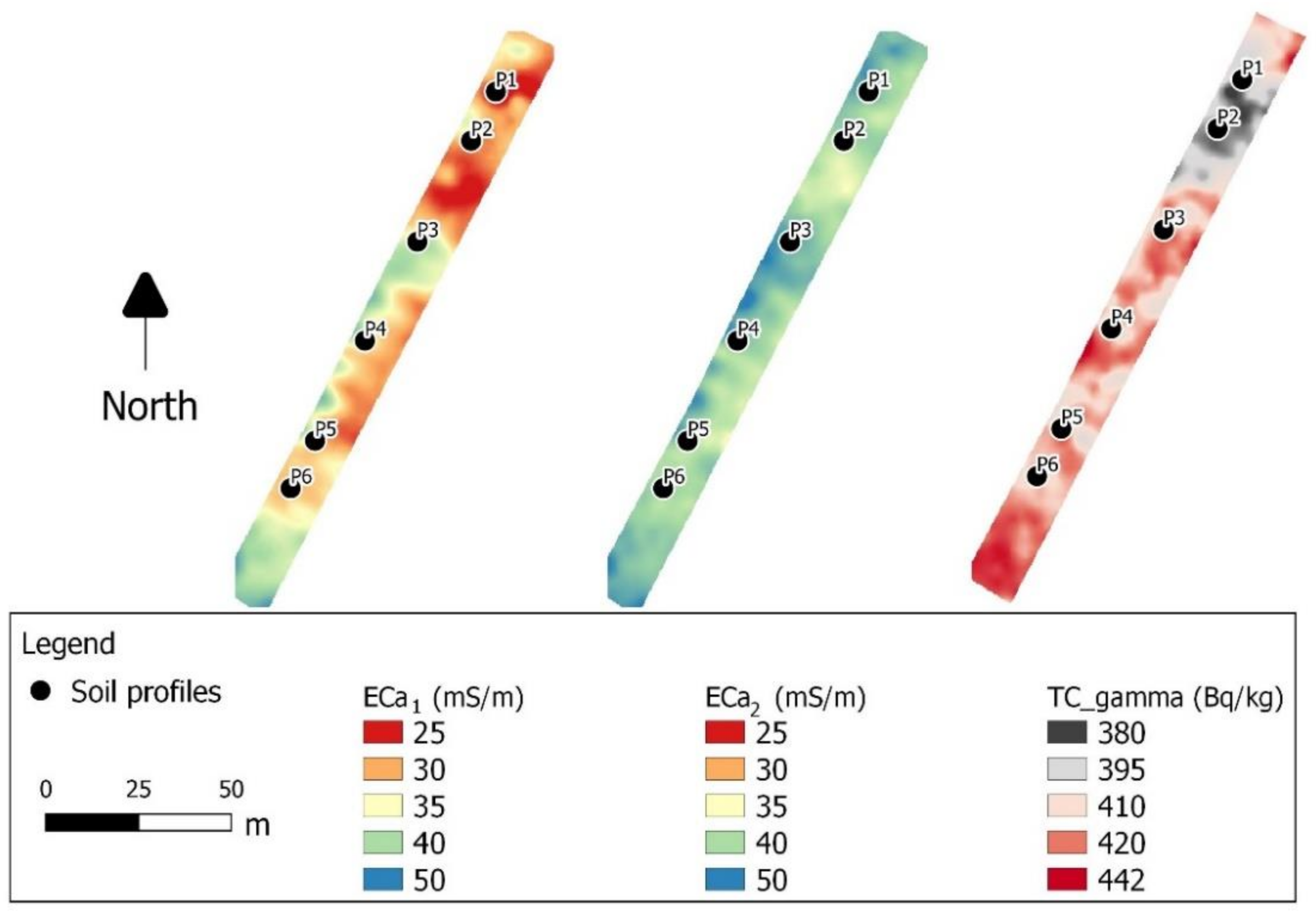
3.1. Proximal Soil Sensing and Profile Description
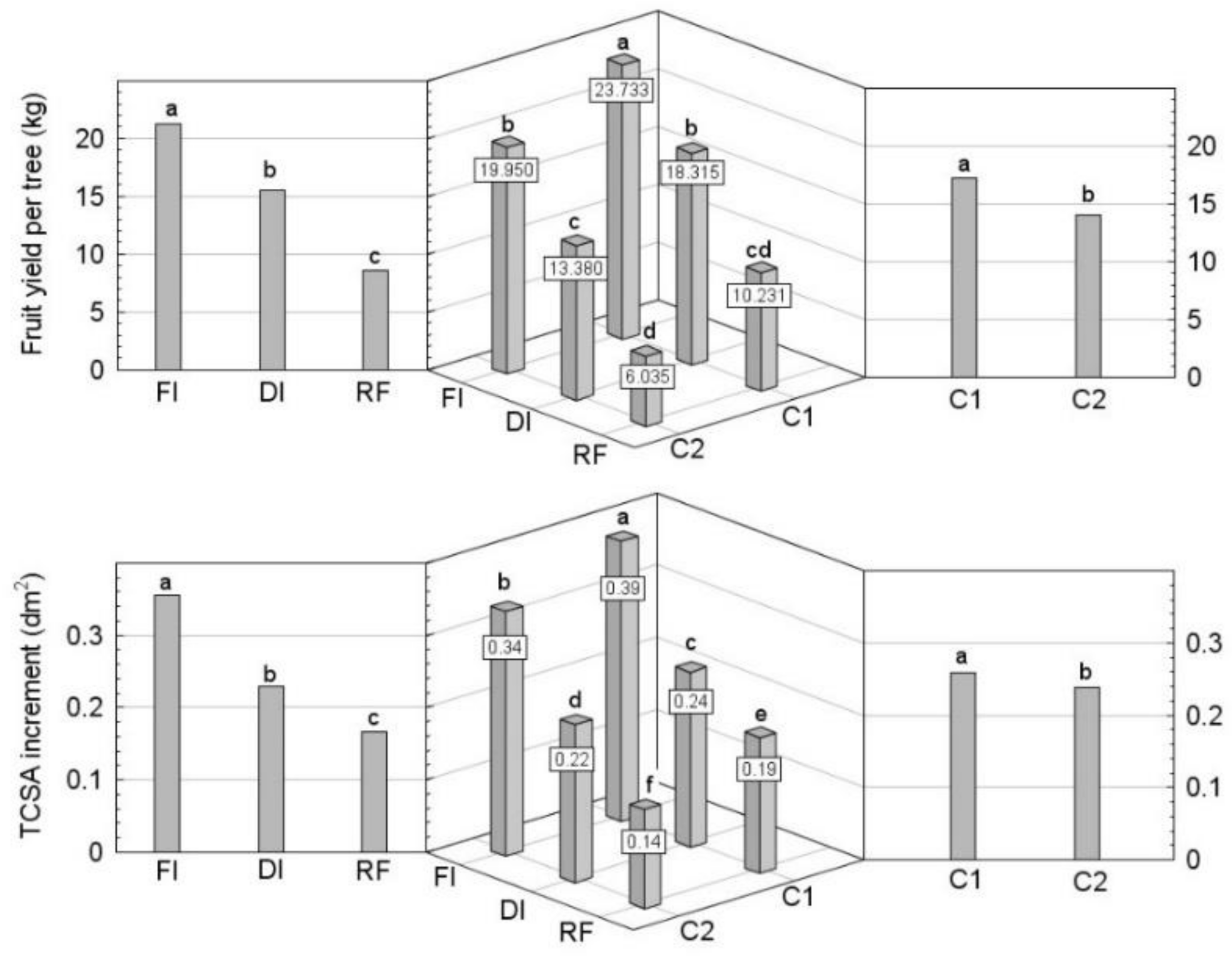
3.2. Irrigation and Cluster Effect on Tree Water Status, Yield and Vegetative Growth
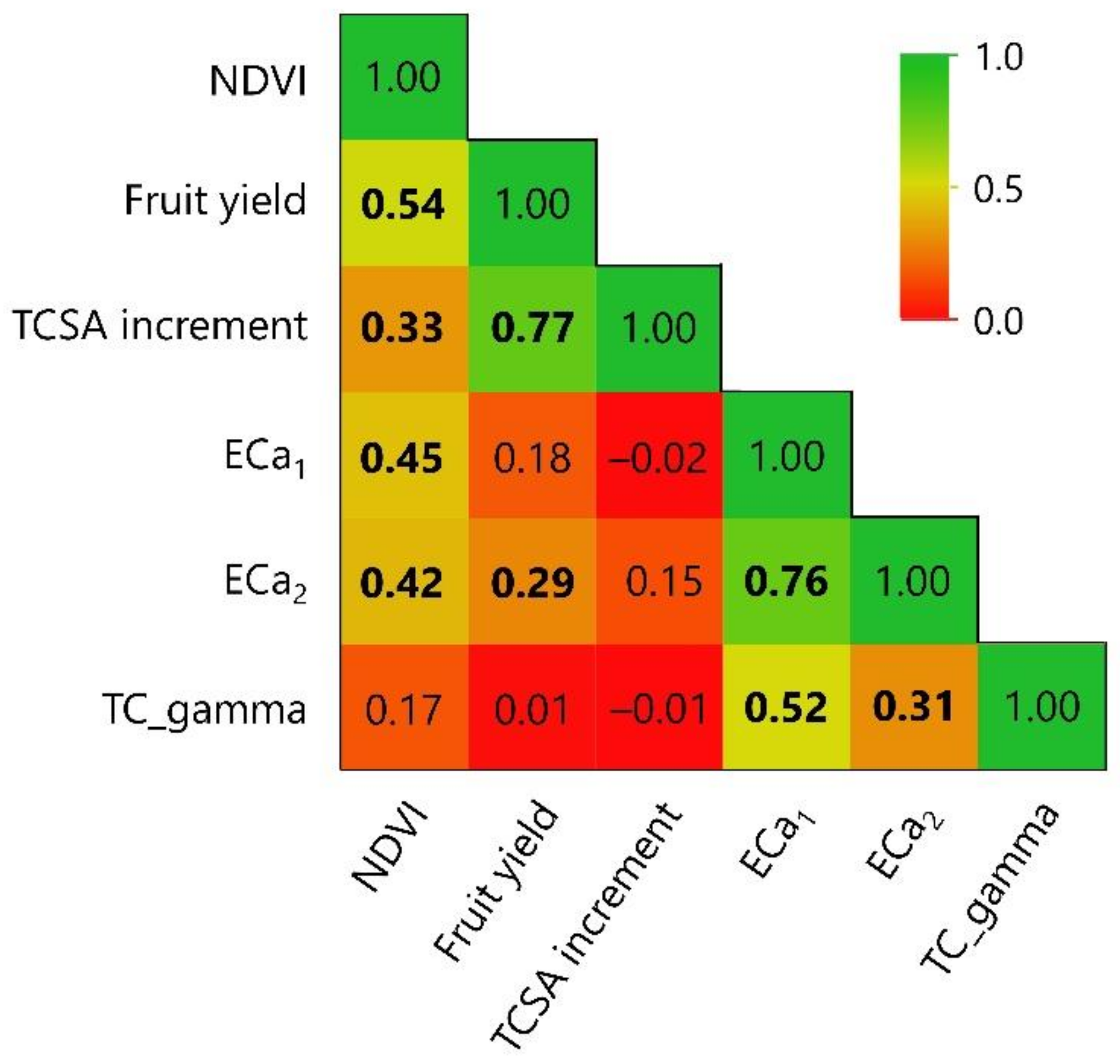
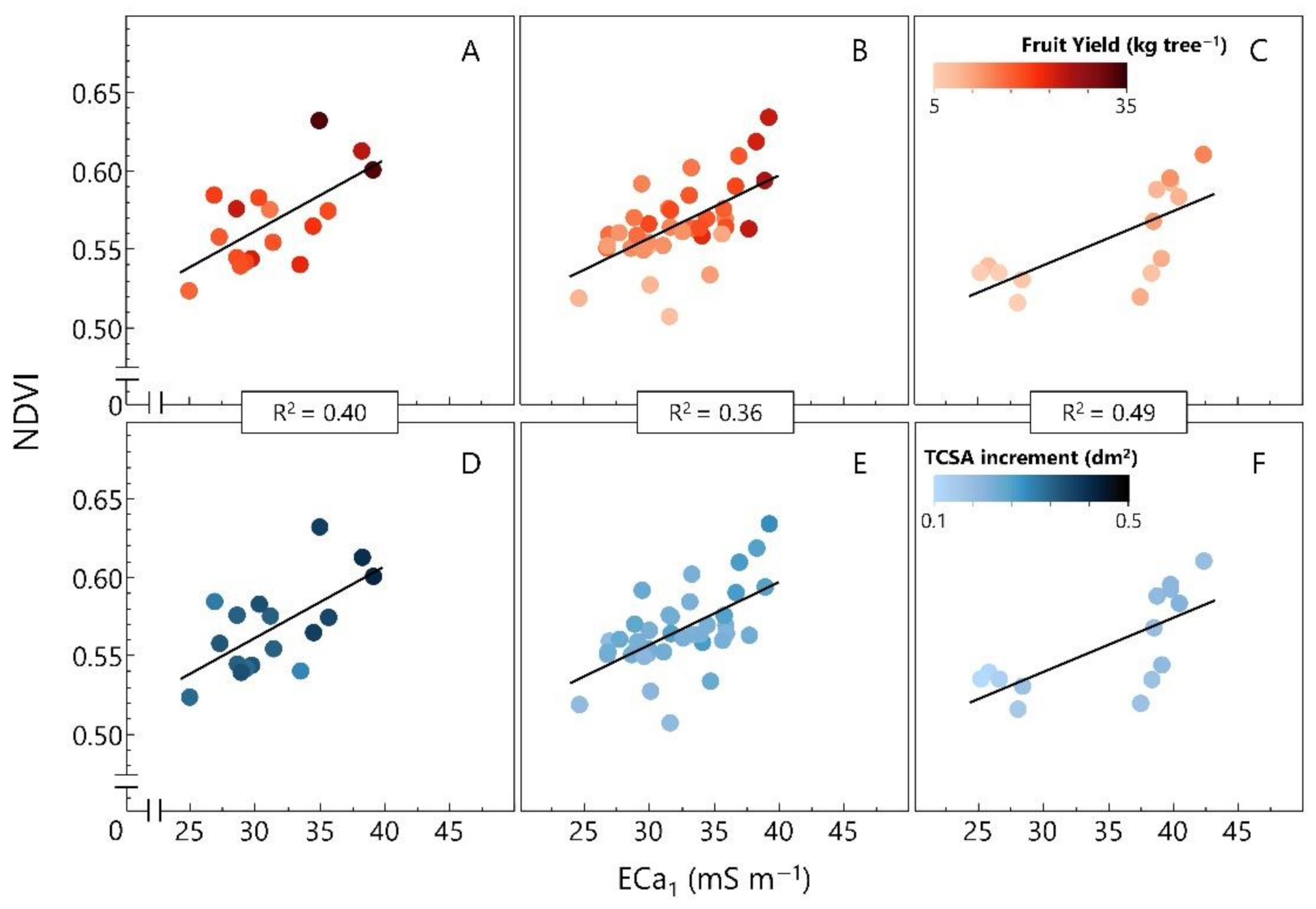
3.3. Comparing Proximal and Remote Sensing Indices against Tree Performances
4. Discussion
4.1. Irrigation and Cluster Effect on Tree Performance
4.2. Comparing Proximal and Remote Sensing Indices against Tree Performance
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Norrant, C.; Douguédroit, A. Monthly and daily precipitation trends in the Mediterranean (1950–2000). Theor. Appl. Climatol. 2006, 83, 89–106. [Google Scholar] [CrossRef]
- Guiot, J.; Cramer, W. Climate change: The 2015 Paris Agreement thresholds and Mediterranean basin ecosystems. Science 2016, 354, 465–468. [Google Scholar] [CrossRef] [PubMed]
- IPCC; Mirzabaev, A.; Wu, J.; Evans, J.; García-Oliva, F.; Hussein, I.A.G.; Iqbal, M.H.; Kimutai, J.; Knowles, T.; Meza, F.; et al. Desertification. In Climate Change and Land: An IPCC Special Report on Climate Change, Desertification, Land Degradation, Sustainable Land Management, Food Security, and Greenhouse Gas Fluxes in Terrestrial Ecosystems; IPCC: New York, NY, USA, 2019. [Google Scholar]
- Spinoni, J.; Naumann, G.; Vogt, J.; Barbosa, P. Meteorological Droughts in Europe: Events and Impacts: Past Trends and Future Projections; EUR 27748; Publications Office of the European Union: Luxembourg, 2016. [Google Scholar]
- Caruso, G.; Rapoport, H.F.; Gucci, R. Long-term evaluation of yield components of young olive trees during the onset of fruit production under different irrigation regimes. Irrig. Sci. 2013, 31, 37–47. [Google Scholar] [CrossRef]
- Caruso, G.; Gucci, R.; Urbani, S.; Esposto, S.; Taticchi, A.; Di Maio, I.; Selvaggini, R.; Servili, M. Effect of different irrigation volumes during fruit development on quality of virgin olive oil of cv. Frantoio. Agric. Water Manag. 2014, 134, 94–103. [Google Scholar] [CrossRef]
- Gucci, R.; Caruso, G.; Gennai, C.; Esposto, S.; Urbani, S.; Servili, M. Fruit growth, yield and oil quality changes induced by deficit irrigation at different stages of olive fruit development. Agric. Water Manag. 2019, 212, 88–98. [Google Scholar] [CrossRef]
- Iniesta, F.; Testi, L.; Orgaz, F.; Villalobos, F.J. The effects of regulated and continuous deficit irrigation on the water use, growth and yield of olive trees. Eur. J. Agron. 2009, 30, 258–265. [Google Scholar] [CrossRef]
- Fernandes-Silva, A.A.; Ferreira, T.C.; Correia, C.M.; Malheiro, A.C.; Villalobos, F.J. Influence of different irrigation regimes on crop yield and water use efficiency of olive. Plant Soil 2010, 333, 35–47. [Google Scholar] [CrossRef]
- Marra, F.P.; Marino, G.; Marchese, A.; Caruso, T. Effects of different irrigation regimes on a super-high-density olive grove cv. “Arbequina”: Vegetative growth, productivity and polyphenol content of the oil. Irrig. Sci. 2016, 34, 313–325. [Google Scholar] [CrossRef]
- Brouder, S.M.; Hofmann, B.S.; Morris, D.K. Mapping soil pH: Accuracy of common soil sampling strategies and estimation techniques. Soil Sci. Soc. Am. J. 2005, 69, 427–442. [Google Scholar] [CrossRef]
- Khosla, R.; Alley, M.M. Soil-specific nitrogen management on mid-Atlantic coastal plain soils. Better Crop. 1999, 83, 6–7. [Google Scholar]
- Moral, F.J.; Rebollo, F.J.; Campillo, C.; Serrano, J.M. Using an objective and probabilistic model to delineate homogeneous zones in hedgerow olive orchards. Soil Till. Res. 2019, 194, 104308. [Google Scholar] [CrossRef]
- Rodrigues, F.A., Jr.; Bramley, R.G.V.; Gobbett, D.L. Proximal soil sensing for precision agriculture: Simultaneous use of electromagnetic induction and gamma radiometrics in contrasting soils. Geoderma 2015, 243, 183–195. [Google Scholar] [CrossRef]
- Munnaf, M.A.; Haesaert, G.; Mouazen, A.M. Map-based site-specific seeding of seed potato production by fusion of proximal and remote sensing data. Soil Till. Res. 2021, 206, 104801. [Google Scholar] [CrossRef]
- Darra, N.; Psomiadis, E.; Kasimati, A.; Anastasiou, A.; Anastasiou, E.; Fountas, S. Remote and proximal sensing-derived spectral indices and biophysical variables for spatial variation determination in vineyards. Agronomy 2021, 11, 741. [Google Scholar] [CrossRef]
- Corwin, D.L.; Lesch, S.M. Application of soil electrical conductivity to precision agriculture: Theory, principles, and guidelines. Agron. J. 2003, 95, 455–471. [Google Scholar] [CrossRef]
- Visconti, F.; De Paz, J.M. Sensitivity of soil electromagnetic induction measurements to salinity, water content, clay, organic matter and bulk density. Precis. Agric. 2021, 22, 1559–1577. [Google Scholar] [CrossRef]
- Priori, S.; Martini, E.; Andrenelli, M.C.; Magini, S.; Agnelli, A.E.; Bucelli, P.; Biagi, M.; Pellegrini, S.; Costantini, E.A.C. Improving wine quality through harvest zoning and combined use of remote and soil proximal sensing. Soil Sci. Soc. Am. J. 2013, 77, 1338–1348. [Google Scholar] [CrossRef]
- Pedrera-Parrilla, A.; Martínez, G.; Espejo-Pérez, A.J.; Gómez, J.A.; Giráldez, J.V.; Vanderlinden, K. Mapping impaired olive tree development using electromagnetic induction surveys. Plant Soil 2014, 384, 381–400. [Google Scholar] [CrossRef]
- Martinez, G.; Huang, J.; Vanderlinden, K.; Giraldez, J.V.; Triantafilis, J. Potential to predict depth-specific soil–water content beneath an olive tree using electromagnetic conductivity imaging. Soil Use Manag. 2018, 34, 236–248. [Google Scholar] [CrossRef]
- Priori, S.; Bianconi, N.; Costantini, E.A.C. Can γ-radiometrics predict soil textural data and stoniness in different parent materials? A comparison of two machine-learning methods. Geoderma 2014, 226–227, 354–364. [Google Scholar] [CrossRef]
- Heggemann, T.; Welp, G.; Amelung, W.; Angst, G.; Franz, S.O.; Koszinski, S.; Schmidt, K.; Pätzold, S. Proximal gamma-ray spectrometry for site-independent in situ prediction of soil texture on ten heterogeneous fields in Germany using support vector machines. Soil Till. Res. 2017, 168, 99–109. [Google Scholar] [CrossRef]
- De Mello, D.C.; Demattê, J.A.M.; De Oliveira Mello, F.A.; Poppiel, R.R.; Silvero, N.E.; Safanelli, J.L.; Barros e Souza, A.; Di Loreto Di Raimo, L.A.; Rizzo, R.; Bispo Resende, M.E.; et al. Applied gamma-ray spectrometry for evaluating tropical soil processes and attributes. Geoderma 2021, 381, 114736. [Google Scholar] [CrossRef]
- Caruso, G.; Zarco-Tejada, P.J.; Gonzalez-Dugo, V.; Moriondo, M.; Tozzini, L.; Palai, G.; Rallo, G.; Hornero, A.; Primicerio, J.; Gucci, R. High-resolution imagery acquired from an unmanned platform to estimate biophysical and geometrical parameters of olive trees under different irrigation regimes. PLoS ONE 2019, 14, e0210804. [Google Scholar] [CrossRef] [PubMed]
- Caruso, G.; Palai, G.; Marra, F.P.; Caruso, T. High-resolution UAV imagery for field olive (Olea europaea L.) phenotyping. Horticulturae 2021, 7, 258. [Google Scholar] [CrossRef]
- Padua, L.; Adão, T.; Sousa, A.; Peres, E.; Sousa, J.J. Individual grapevine analysis in a multi-temporal context using UAV-based multi-sensor imagery. Remote Sens. 2020, 12, 139. [Google Scholar] [CrossRef]
- Torres-Sánchez, J.; López-Granados, F.; Serrano, N.; Arquero, O.; Peña, J. High-throughput 3-D monitoring of agricultural-tree plantations with unmanned aerial vehicle (UAV) technology. PLoS ONE 2015, 10, e0130479. [Google Scholar] [CrossRef] [PubMed]
- Zarco-Tejada, P.J.; Diaz-Varela, R.; Angileri, V.; Loudjani, P. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods. Eur. J. Agron. 2014, 55, 89–99. [Google Scholar] [CrossRef]
- Peña-Barragán, J.M.; Jurado-Expósito, M.; López-Granados, F.; Atenciano, S.; Sánchez-de la Orden, M.; García-Ferrer, A.; García-Torres, L. Assessing land-use in olive groves from aerial photographs. Agric. Ecosyst. Environ. 2004, 103, 117–122. [Google Scholar] [CrossRef]
- Noori, O.; Panda, S.S. Site-specific management of common olive: Remote sensing, geospatial, and advanced image processing applications. Comput. Electron. Agric. 2016, 127, 680–689. [Google Scholar] [CrossRef]
- Sola-Guirado, R.R.; Castillo-Ruiz, F.J.; Jiménez-Jiménez, F.; Blanco-Roldan, G.L.; Castro-Garcia, S.; Gil-Ribes, J.A. Olive actual “on year” yield forecast tool based on the tree canopy geometry using UAS imagery. Sensors 2017, 17, 1743. [Google Scholar] [CrossRef]
- Stateras, D.; Kalivas, D. Assessment of olive tree canopy characteristics and yield forecast model using high resolution UAV imagery. Agriculture 2020, 10, 385. [Google Scholar] [CrossRef]
- De Benedetto, D.; Castrignano, A.; Diacono, M.; Rinaldi, M.; Ruggieri, S.; Tamborrino, R. Field partition by proximal and remote sensing data fusion. Biosyst. Eng. 2013, 114, 372–383. [Google Scholar] [CrossRef]
- Ortega-Blu, R.; Molina-Roco, M. Evaluation of vegetation indices and apparent soil electrical conductivity for site-specific vineyard management in Chile. Precis. Agric. 2016, 17, 434–450. [Google Scholar] [CrossRef]
- Panda, S.S.; Hoogenboom, G.; Paz, J.O. Remote sensing and geospatial technological applications for site-specific management of fruit and nut crops: A review. Remote Sens. 2010, 2, 1973–7997. [Google Scholar] [CrossRef]
- Bonfante, A.; Agrillo, A.; Albrizio, R.; Basile, A.; Buonomo, R.; De Mascellis, R.; Terribile, F. Functional homogeneous zones (fHZs) in viticultural zoning procedure: An Italian case study on Aglianico vine. Soil 2015, 1, 427–441. [Google Scholar] [CrossRef]
- Tardaguila, J.; Diago, M.P.; Priori, S.; Oliveira, M. Mapping and managing vineyard homogeneous zones through proximal geoelectrical sensing. Arch. Agron. Soil Sci. 2018, 64, 409–418. [Google Scholar] [CrossRef]
- Bahat, I.; Netzer, Y.; Grünzweig, J.M.; Alchanatis, V.; Peeters, A.; Goldshtein, E.; Ohana-Levi, N.; Ben-Gal, A.; Cohen, Y. In-season interactions between vine vigor, water status and wine quality in terrain-based management-zones in a ‘Cabernet Sauvignon’ vineyard. Remote Sens. 2021, 13, 1636. [Google Scholar] [CrossRef]
- Caruso, G.; Tozzini, L.; Rallo, G.; Primicerio, J.; Moriondo, M.; Palai, G.; Gucci, R. Estimating biophysical and geometrical parameters of grapevine canopies (‘Sangiovese’) by an unmanned aerial vehicle (UAV) and VIS-NIR cameras. Vitis 2017, 56, 63–70. [Google Scholar] [CrossRef]
- Serrano, J.; Shahidian, S.; Marques da Silva, J.; Paixão, L.; Calado, J.; de Carvalho, M. Integration of soil electrical conductivity and indices obtained through satellite imagery for differential management of pasture fertilization. AgriEngineering 2019, 1, 567–585. [Google Scholar] [CrossRef]
- Bellvert, J.; Mata, M.; Vallverdú, X.; Paris, C.; Marsal, J. Optimizing precision irrigation of a vineyard to improve water use efficiency and profitability by using a decision-oriented vine water consumption model. Precis. Agric. 2021, 22, 319–341. [Google Scholar] [CrossRef]
- Aggelopoulou, K.; Wulfsohn, D.; Fountas, S.; Nanos, G.; Gemtos, T.; Blackmore, S. Spatial variability of yield and quality in an apple orchard. Precis. Agric. 2010, 11, 538–556. [Google Scholar] [CrossRef]
- Türker, U.; Talebpour, B.; Yegül, U. Determination of the relationship between apparent soil electrical conductivity with pomological properties and yield in different apple varieties. Agriculture 2011, 98, 307–314. [Google Scholar]
- Uribeetxebarria, A.; Daniele, E.; Escolà, A.; Arnó, J.; Martinez-Casasnovas, J.A. Spatial variability in orchards after land transformation: Consequences for precision agriculture practices. Sci. Total Environ. 2018, 635, 343–352. [Google Scholar] [CrossRef] [PubMed]
- Millán, S.; Moral, F.J.; Prieto, M.H.; Pérez-Rodríguez, J.M.; Campillo, C. Mapping soil properties and delineating management zones based on electrical conductivity in a hedgerow olive grove. Trans. ASABE 2019, 62, 749–760. [Google Scholar] [CrossRef]
- McCutchan, H.; Shackel, K.A. Stem-water potential as a sensitive indicator of water stress in prune trees (Prunus domestica L. cv. French). J. Am. Soc. Hortic. Sci. 1992, 117, 607–611. [Google Scholar] [CrossRef]
- Gucci, R.; Lodolini, E.; Rapoport, H.F. Productivity of olive trees with different water status and crop load. J. Hortic. Sci. Biotechnol. 2007, 82, 648–656. [Google Scholar] [CrossRef]
- Rouse, J.W., Jr.; Haas, R.H.; Deering, D.W.; Schell, J.A.; Harlan, J.C. Monitoring the Vernal Advancement and Retrogradation (Greenwave Effect) of Natural Vegetation; NASA/GSFC Type III Final Report; NASA: Greenbelt, MD, USA, 1974; p. 371. [Google Scholar]
- McNeill, J.D. Use of electromagnetic methods for groundwater studies. In Geotechnical an Environmental Geophysics: Volume I: Review and Tutorial; Society of Exploration Geophysicists: Houston, TX, USA, 1990; pp. 191–218. [Google Scholar]
- Nocco, M.A.; Ruark, M.D.; Kucharik, C.J. Apparent electrical conductivity predicts physical properties of coarse soils. Geoderma 2019, 335, 1–11. [Google Scholar] [CrossRef]
- Martini, E.; Wollschläger, U.; Musolff, A.; Werban, U.; Zacharias, S. Principal component analysis of the spatiotemporal pattern of soil moisture and apparent electrical conductivity. Vadose Zone J. 2017, 16, 1–12. [Google Scholar] [CrossRef]
- Farzamian, M.; Paz, M.C.; Paz, A.M.; Castanheira, N.L.; Gonçalves, M.C.; Monteiro Santos, F.A.; Triantafilis, J. Mapping soil salinity using electromagnetic conductivity imaging—A comparison of regional and location-specific calibrations. Land Degrad. Dev. 2019, 30, 1393–1406. [Google Scholar] [CrossRef]
- Priori, S.; Fantappiè, M.; Magini, S.; Costantini, E.A.C. Using the ARP-03 for high-resolution mapping of calcic horizons. Int. Agrophys. 2013, 27, 313–321. [Google Scholar] [CrossRef][Green Version]
- Huang, J.; Pedrera-Parrilla, A.; Vanderlinden, K.; Taguas, E.V.; Gómez, J.A.; Triantafilis, J. Potential to map depth-specific soil organic matter content across an olive grove using quasi-2d and quasi-3d inversion of DUALEM-21 data. Catena 2017, 152, 207–217. [Google Scholar] [CrossRef]
- Van Egmond, F.M.; Loonstra, E.H.; Limburg, J. Gamma ray sensor for topsoil mapping: The Mole. In Proximal Soil Sensing; Springer: Dordrecht, The Netherlands, 2010; pp. 323–332. [Google Scholar]
- Coulouma, G.; Caner, L.; Loonstra, E.H.; Lagacherie, P. Analysing the proximal gamma radiometry in contrasting Mediterranean landscapes: Towards a regional prediction of clay content. Geoderma 2016, 266, 127–135. [Google Scholar] [CrossRef]
- Kassim, A.M.; Nawar, S.; Mouazen, A.M. Potential of on-the-go gamma-ray spectrometry for estimation and management of soil potassium site specifically. Sustainability 2021, 13, 661. [Google Scholar] [CrossRef]
- Dierke, C.; Werban, U. Relationships between gamma-ray data and soil properties at an agricultural test site. Geoderma 2013, 199, 90–98. [Google Scholar] [CrossRef]
- Jahn, R.; Blume, H.P.; Asio, V.B.; Spaargaren, O.; Schad, P. Guidelines for Soil Description; FAO: Rome, Italy, 2006. [Google Scholar]
- IUSS Working Group WRB. World Reference Base for Soil Resources 2014, Update 2015. International Soil Classification System for Naming Soils and Creating Legends for Soil Maps. World Soil Resources Reports No. 106; FAO: Rome, Italy, 2015. [Google Scholar]
- Andrenelli, M.C.; Fiori, V.; Pellegrini, S. Soil particle-size analysis up to 250 μm by X-ray granulometer: Device set-up and regressions for data conversion into pipette equivalent values. Geoderma 2013, 192, 380–393. [Google Scholar] [CrossRef]
- Saxton, K.E.; Rawls, W.J. Soil water characteristic estimates by texture and organic matter for hydrologic solutions. Soil Sci. Soc. Am. J. 2006, 70, 1569–1578. [Google Scholar] [CrossRef]
- Rubin, J. Optimal classification into groups: An approach for solving the taxonomy problem. J. Theor. Biol. 1967, 15, 103–144. [Google Scholar] [CrossRef]
- Basso, B.; Ritchie, J.T.; Cammarano, D.; Sartori, L. A strategic and tactical management approach to select optimal N fertilizer rates for wheat in a spatially variable field. Eur. J. Agron. 2011, 35, 215–222. [Google Scholar] [CrossRef]
- Manfrini, L.; Corelli Grappadelli, L.; Morandi, B.; Losciale, P.; Taylor, J. Innovative approaches to orchard management: Assessing the variability in yield and maturity in a ‘Gala’ apple orchard using a simple management unit modeling approach. Eur. J. Hortic. Sci. 2020, 85, 211–218. [Google Scholar] [CrossRef]
- Fountas, S.; Aggelopoulou, K.; Bouloulis, C.; Nanos, G.D.; Wulfsohn, D.; Gemtos, T.A.; Paraskevopoulos, A.; Galanis, M. Site-specific management in an olive tree plantation. Precis. Agric. 2011, 12, 179–195. [Google Scholar] [CrossRef]
- Terrón, J.M.; Blanco, J.; Moral, F.J.; Mancha, L.A.; Uriarte, D.; Marques da Silva, J.R. Evaluation of vineyard growth under four irrigation regimes using vegetation and soil on-the-go sensors. Soil 2015, 1, 459–473. [Google Scholar] [CrossRef]
- Priori, S.; Pellegrini, S.; Perria, R.; Puccioni, S.; Storchi, P.; Valboa, G.; Costantini, E.A. Scale effect of terroir under three contrasting vintages in the Chianti Classico area (Tuscany, Italy). Geoderma 2019, 334, 99–112. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cluster 1 (Profile 1) | Soil Horizons | |||
|---|---|---|---|---|
| Ap1 | Ap2 | Bt | Btg | |
| Depth (m) | 0.8 | 0.40 | 1.00 | 1.50 |
| Clay (dag kg−1) | 13.9 | 22.5 | 17.7 | 22.1 |
| Silt (dag kg−1) | 45.5 | 33.2 | 44.4 | 39.3 |
| Sand (dag kg−1) | 40.6 | 44.3 | 37.9 | 38.6 |
| CF (%vol) | 2 | 2 | 0 | 0 |
| CaCO3 tot (dag kg−1) | 2.4 | 2.5 | 2.3 | 2.1 |
| SOC (dag kg−1) | 31.4 | 11.0 | 9.0 | 7.2 |
| TN (g kg−1) | 24.4 | 9.8 | 9.7 | 7.7 |
| AWC (mm) | 12 | 45 | 84 | 70 |
| Cluster 2 | Soil Horizons | |||
| (Profile 4) | Ap1 | Ap2 | Bt | Btg |
| Depth (m) | 0.10 | 0.35 | 0.90 | 1.15 |
| Clay (dag kg−1) | 18.4 | 16.1 | 16.8 | 24.7 |
| Silt (dag kg−1) | 37.3 | 35.4 | 36.9 | 35.6 |
| Sand (dag kg−1) | 44.3 | 48.5 | 46.3 | 39.7 |
| CF (%vol) | 12 | 12 | 5 | 0 |
| CaCO3 tot (dag kg−1) | 2.4 | 2.3 | 2.3 | 2.3 |
| SOC (dag kg−1) | 9.0 | 13.1 | 9.0 | 6.8 |
| TN (g kg−1) | 9.1 | 13.0 | 8.9 | 7.5 |
| AWC (mm) | 11 | 28 | 66 | 33 |
| Cluster | Irrigation | Stem Water Potential (MPa) | ||
|---|---|---|---|---|
| DOY 187 | DOY 219 | DOY 259 | ||
| C1 + C2 | Full | −1.43 ± 0.07 | −1.49 ± 0.06 a | −1.57 ± 0.06 a |
| Deficit | −1.39 ± 0.09 | −2.49 ± 0.13 b | −2.65 ± 0.07 b | |
| Rainfed | −1.46 ± 0.07 | −3.65 ± 0.09 c | −3.89 ± 0.11 c | |
| C1 | Full | −1.43 ± 0.08 | −1.50 ± 0.09 a | −1.58 ± 0.09 a |
| Deficit | −1.43 ± 0.10 | −2.55 ± 0.05 b | −2.64 ± 0.11 b | |
| Rainfed | −1.42 ± 0.08 | −3.60 ± 0.05 c | -3.88 ± 0.08 c | |
| C2 | Full | −1.42 ± 0.08 | −1.48 ± 0.03 a | −1.56 ± 0.03 a |
| Deficit | −1.38 ± 0.12 | −2.45 ± 0.13 b | −2.63 ± 0.00 b | |
| Rainfed | −1.50 ± 0.05 | −3.70 ± 0.10 c | −3.90 ± 0.15 c | |
| Irrigation | WUEf (g Dry Weight L−1 H2O) | WUEo (g Oil L−1 H2O) | ||||
|---|---|---|---|---|---|---|
| C1 + C2 | C1 | C2 | C1 + C2 | C1 | C2 | |
| FI | 0.91 | 0.95 | 0.88 | 0.36 | 0.38 | 0.35 |
| DI | 0.97 | 1.15 | 0.78 | 0.42 | 0.49 | 0.34 |
| RF | 0.66 | 0.82 | 0.50 | 0.27 | 0.34 | 0.19 |
| Irrigation | Predictive Variables | B | p-Value (t-Test) | R2adj | F (df) | p-Value (Regression) | SEP (kg/Tree) |
|---|---|---|---|---|---|---|---|
| FI | Intercept | −36.7 | 0.021 | 0.48 | 16.5 (16) | 0.001 | 3.92 |
| NDVI | 103.2 | <0.001 | |||||
| DI | Intercept | −48.1 | <0.001 | 0.61 | 31.9 (37) | <0.001 | 2.96 |
| NDVI | 85.5 | <0.001 | |||||
| ECa1 | 0.5 | 0.002 | |||||
| RF | Intercept | 100.5 | 0.038 | 0.55 | 10.7 (14) | 0.001 | 1.98 |
| ECa1 | 0.54 | 0.001 | |||||
| TC_gamma | −0.26 | 0.035 |
| Irrigation | Predictive Variables | B | p-Value (t-Test) | R2adj | F (df) | p-Value (Regression) | SEP (dm2) |
|---|---|---|---|---|---|---|---|
| FI | Intercept | −0.12 | 0.250 | 0.57 | 23.8 (16) | <0.001 | 0.027 |
| NDVI | 0.85 | <0.001 | |||||
| DI | Intercept | −0.15 | 0.017 | 0.49 | 20.1 (37) | <0.001 | 0.018 |
| NDVI | 0.51 | <0.001 | |||||
| ECa2 | 0.01 | 0.059 | |||||
| RF | Intercept | 0.07 | 0.636 | 0.61 | 9.5 (13) | 0.001 | 0.02 |
| NDVI | 0.43 | 0.033 | |||||
| ECa1 | 0.01 | 0.016 | |||||
| ECa2 | −0.01 | 0.072 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caruso, G.; Palai, G.; Gucci, R.; Priori, S. Remote and Proximal Sensing Techniques for Site-Specific Irrigation Management in the Olive Orchard. Appl. Sci. 2022, 12, 1309. https://doi.org/10.3390/app12031309
Caruso G, Palai G, Gucci R, Priori S. Remote and Proximal Sensing Techniques for Site-Specific Irrigation Management in the Olive Orchard. Applied Sciences. 2022; 12(3):1309. https://doi.org/10.3390/app12031309
Chicago/Turabian StyleCaruso, Giovanni, Giacomo Palai, Riccardo Gucci, and Simone Priori. 2022. "Remote and Proximal Sensing Techniques for Site-Specific Irrigation Management in the Olive Orchard" Applied Sciences 12, no. 3: 1309. https://doi.org/10.3390/app12031309
APA StyleCaruso, G., Palai, G., Gucci, R., & Priori, S. (2022). Remote and Proximal Sensing Techniques for Site-Specific Irrigation Management in the Olive Orchard. Applied Sciences, 12(3), 1309. https://doi.org/10.3390/app12031309