1. Introduction
A sexually mature female has two almond-shaped ovaries about the size of a large grape, one on each side of the uterus. The human ovary consists of a surface, an inner medulla and outer cortex, with indistinct boundaries between the latter two. The medulla contains the blood vessels, lymphatic vessels and nerves, while the cortex embraces the developing follicles [
1]. The follicle is certainly a very important part of the ovary. It is similar to a small sac filled with liquid, holding one immature egg (ovum). The ovary contains thousands of follicles. A few selected follicles begin to develop (grow) during each woman’s menstrual cycle. At the end of the menstrual cycle, typically, only one of these follicles reaches maturity and the rest deteriorate. This mature, so-called dominant, follicle breaks open and releases the egg from the ovary for possible fertilisation [
1,
2].
Monitoring changes in the ovary, especially follicle growth dynamics during the menstrual cycle, is crucial for the fields of Obstetrics and Gynaecology (e.g., for In-Vitro Fertilisation). On the other hand, the measurement of ovarian volume has been shown to be a useful indirect indicator of the ovarian reserve in women of reproductive age, in the diagnosis and management of a number of disorders of puberty and adult reproductive function, and is under investigation as a screening tool for ovarian cancer [
3]. Clinicians today use non-invasive ultrasound devices regularly for these purposes, with which they conduct frequent examinations of patients. Modern ultrasound devices support 3D recording, and contain computer algorithms that help Sonographers recognise the observed 3D structures. The use of 3D ultrasound devices allows us to capture the entire ovary and follicles in a single sweep, which may take seconds to complete, unlike 2D ultrasound devices, where much more time is needed to capture the imaging material. Besides, the 3D recording enables a more detailed survey of the ovary and follicles compared to 2D ultrasound. Several display modes and standardised examinations permit the observation of ovary and follicles in controlled planes and rendered images from different (optimal) angles. In this way, we can notice the peculiarities of the ovary and follicles faster and more accurately [
4].
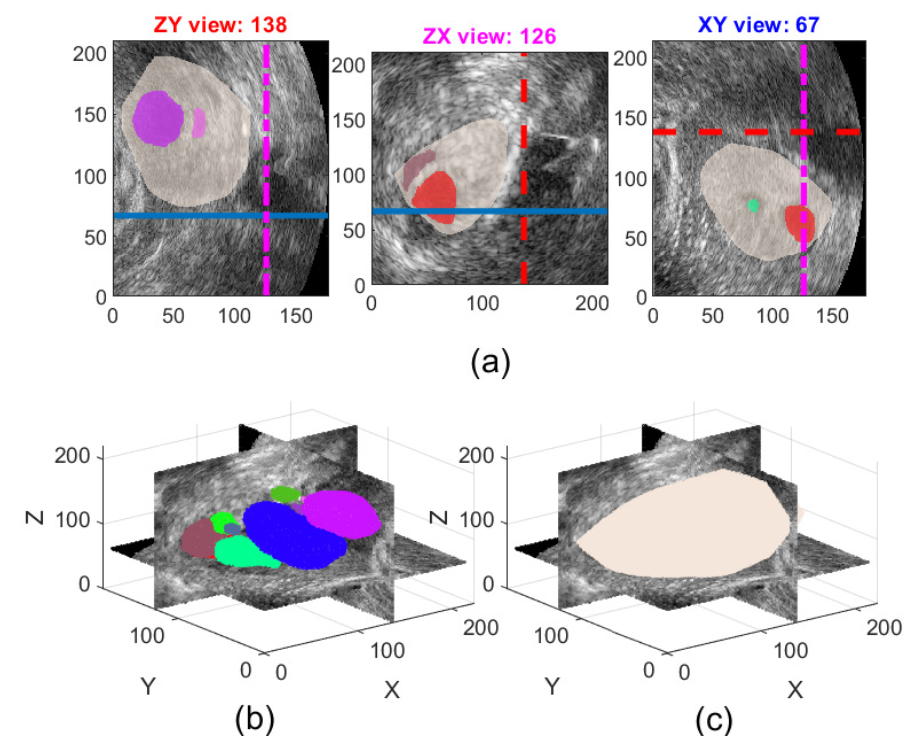
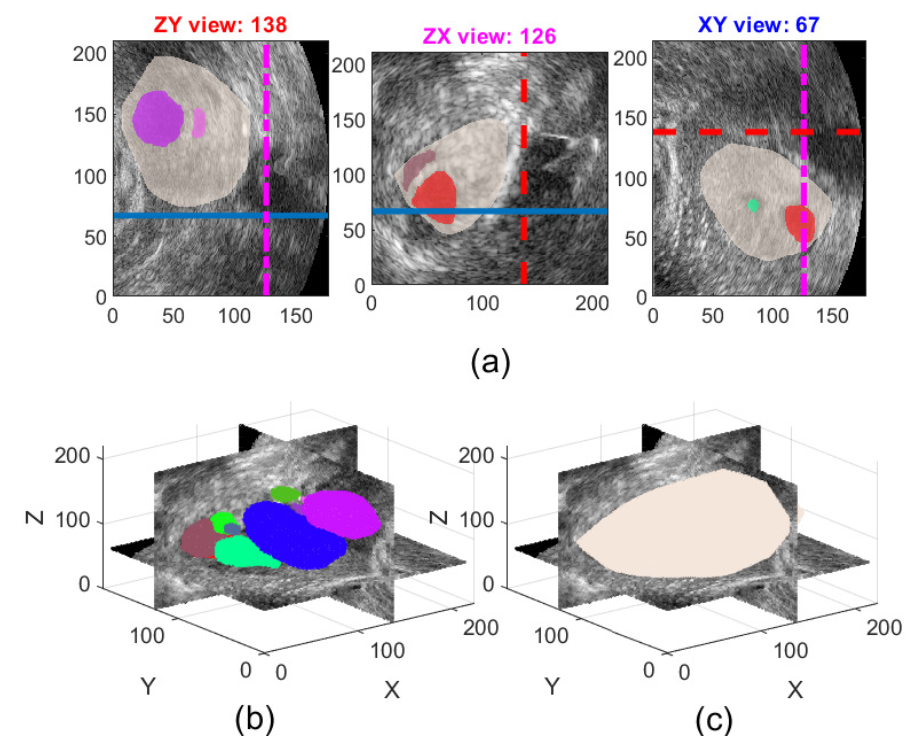
The ovarian follicles manifest on ultrasound images (volumes) as darker regions (volumes) on a brighter background.
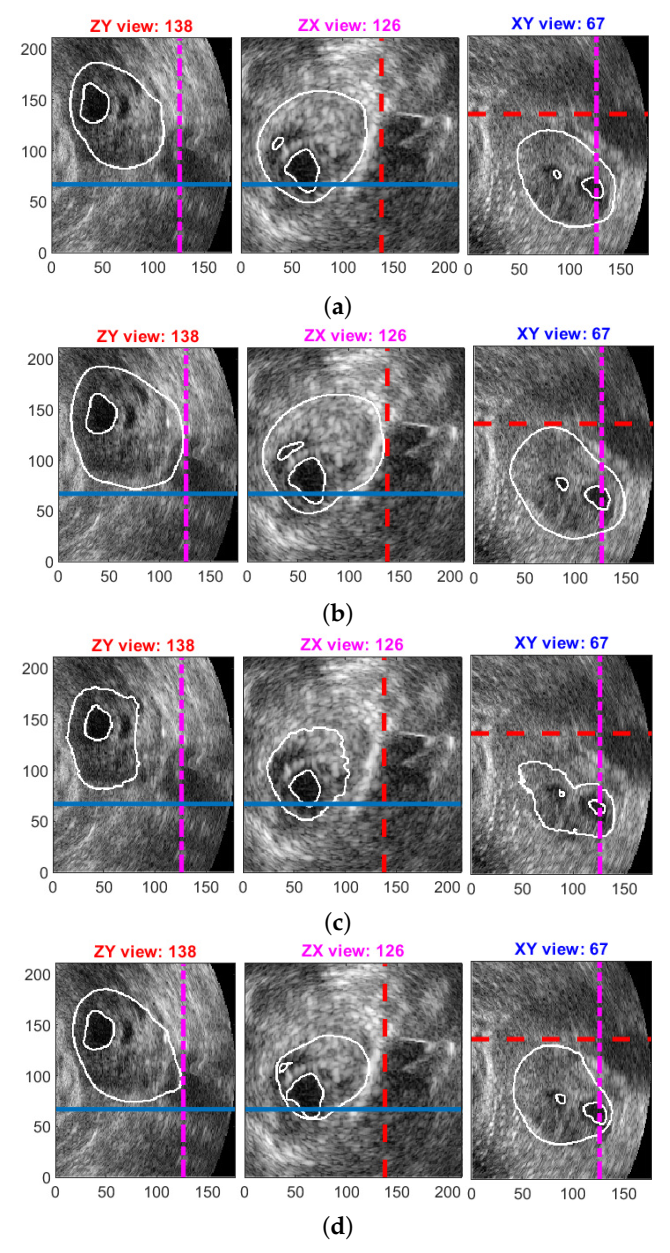
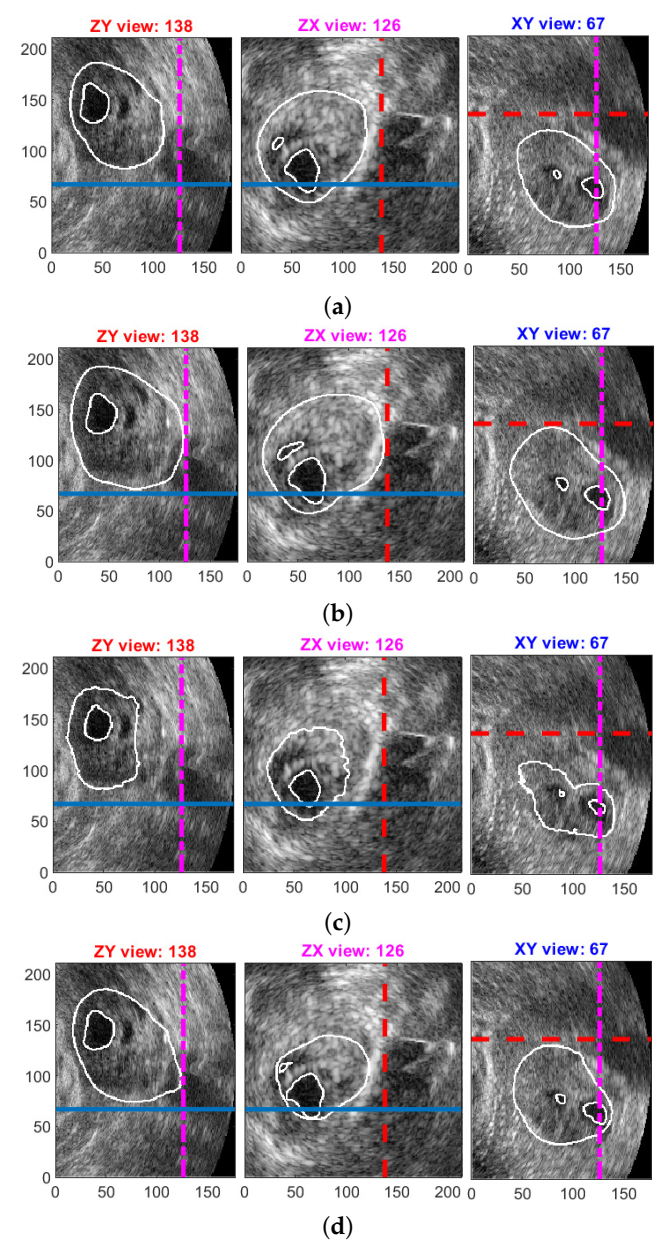
Figure 1 depicts a sample 3D ovarian ultrasound image with follicles (coloured) inside an ovary (ochre) annotated by an expert in 2D views of selected cross-sections through the volume (top row) and in a 3D view (bottom row).
Manual, or non-automated follicle observing in a day-to-day manner is very laborious and time-consuming, and due to the routine nature of the work it can also lead to inaccuracies. Already in the 90s of the last century, computer procedures for follicle detection and recognition began to appear, initially for the 2D ultrasound images [
5]. This research and application field has been evolving constantly with the introduction of increasingly efficient and accurate automated or semi-automated detection algorithms, respectively. Thus, we have witnessed a development from simple 2D detection methods in the 1990s, such as solutions based on heuristic graph searching, optimal thresholding, cellular automata and 2D region growing, all the way to sophisticated approaches at the beginning of the 21st century, such as are knowledge-based methods, methods based on cellular neural networks and the Kalman filter [
5,
6]. The efficiency (usually sensitivity and precision were used as the metrics) and accuracy (metrics mean absolute distance between the detected and annotated follicle) of detection approaches have increased with this development. 3D ultrasound devices began to appear massively around 2000, and in a few years became the de facto Standard in the field of Obstetrics and Gynaecology. Simultaneously, the development of follicle detection approaches has shifted from methods designed to process 2D cross-sections through the ovary to true 3D detection methods that process 3D ovarian ultrasound volumes as a whole. Among them we find successful methods based either on continuous wavelets, levels sets, or on trained probabilistic frameworks of ovary and follicle models [
5,
7]. The proprietary semi-automated detection algorithm SonoAVC [
8], incorporated in the General Electric ultrasound devices designed for automated volume calculation, should also be pointed out. The 3D follicle detection method based on the Directional 3D Wavelet Transform (3D DWT) [
9], developed by our research group, has proven to be also very efficient and accurate.
Recently, Deep Learning based approaches have been proposed for follicle and ovary detection. The CR-Unet network [
10] upgraded a 2D U-Net architecture by spatial Recurrent Neural Network (RNN) modules. These RNN modules were used to learn large scale spatial features in the segmentation model. The model was trained to detect ovaries and follicles simultaneously as a three class segmentation problem. This model was, indeed, trained on 2D ultrasound slices, but can also be applied in a slice-by-slice manner to 3D volumes. The S-Net network [
11] also utilised the 2D U-Net, with the difference that several slices of a 3D volume were processed at once. Such processing enabled the extraction of additional 3D information, and, thus, reduced discontinuities in the 3D segments. S-Net treated ovary and follicle detection as two binary segmentation problems. It used a special composite Binary Cross Entropy loss function that gave an additional penalty to follicle detections outside the ovary. Both mentioned Deep Neural Networks were trained and evaluated on proprietary databases, which makes direct comparisons with these results difficult. However, the methods in [
10,
11] were compared directly, demonstrating S-Net [
11] to be superior.
After a brief review, we concluded that this research field is a mature, but still active field, as the development of improved computer follicle detection approaches still challenges many researchers [
5,
9,
10,
11,
12].
Already in our review article [
5] we identified the problem of unbiased comparison of follicle detection algorithms. In order to validate the solutions, different research groups, namely, use all sorts of metrics, evaluated on their own image datasets, in which the follicles (ovaries) are annotated manually by experts according to their own protocol. Such indefiniteness limits the objective comparison of different follicle-detection approaches. In our previous work [
7], we therefore published the USOVA3D public database of annotated 3D ultrasound images of ovaries, which was supplemented with a precisely specified verification protocol for unbiased assessment of general detection algorithms. Additionally, two baseline algorithms were introduced for follicle and ovary detection. The first algorithm, 3D DWT, uses heuristic features and a classical approach to designing algorithms. In fact, it is a small upgrade of our most efficient follicle detection method to date [
9]. The second baseline algorithm, 2D UNET, demonstrates modern algorithm designing based on Deep Learning, the Convolutional Neural Networks (CNN) theory, and established 2D U-Net architecture. Both algorithms were evaluated on the USOVA3D testing set, and the baseline results (i.e., scores) were established for the follicle and ovary detection efficiency [
7]. We also confirmed by thorough analysis that the USOVA3D database can be a reliable source for developing new detection methods.
We deal with the development of effective learning-based object detection approaches in 3D medical imaging data using 3D Convolutional Neural Networks in this research. Although 2D CNN-based detection methods that process volumes in a slice-by-slice manner and then combine partial results into a whole, generally tend to be superior in respect of the ‘true’ 3D CNN-based detection methods that process volumes as a whole [
13] (the reasons are often the need for an extremely large number of training samples and the huge computational complexity of 3D CNNs), the opposite will be demonstrated in this work. On the case of follicle and ovary detection in ovarian ultrasound volumes, we will confirm experimentally that it is possible to develop sophisticated 3D CNN-based methods that surpass 2D CNN-based methods and 3D methods based on ‘hand-crafted’ features. The development and verification of 3D detection procedures will be conducted by using the USOVA3D public database, which is basically a relatively small database. It is usually the lack of data that is the main reason for the lower efficiency of 3D CNN-based detection methods [
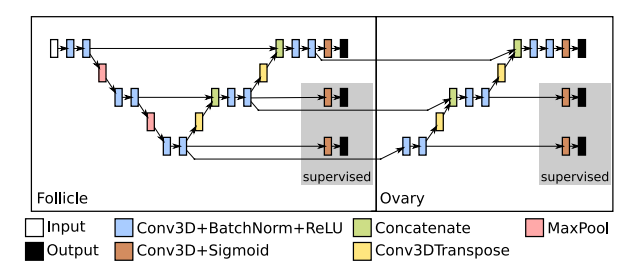
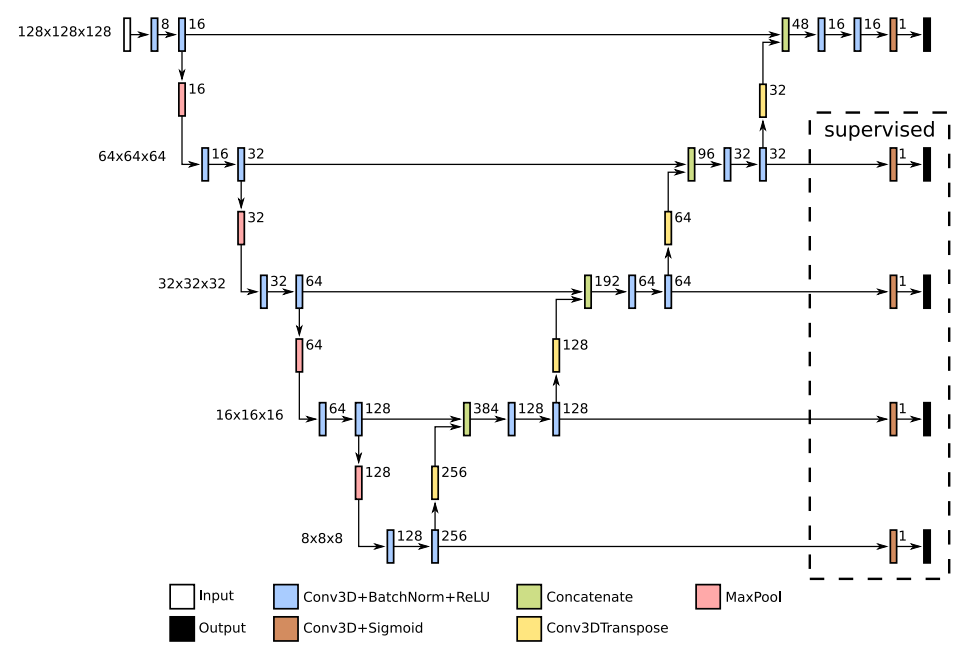
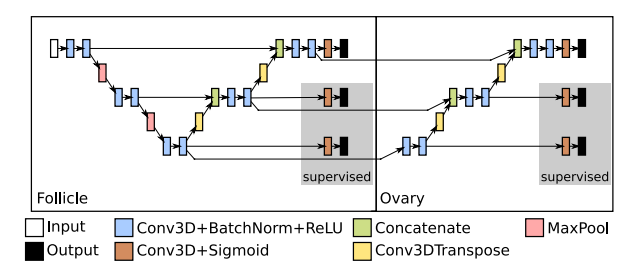
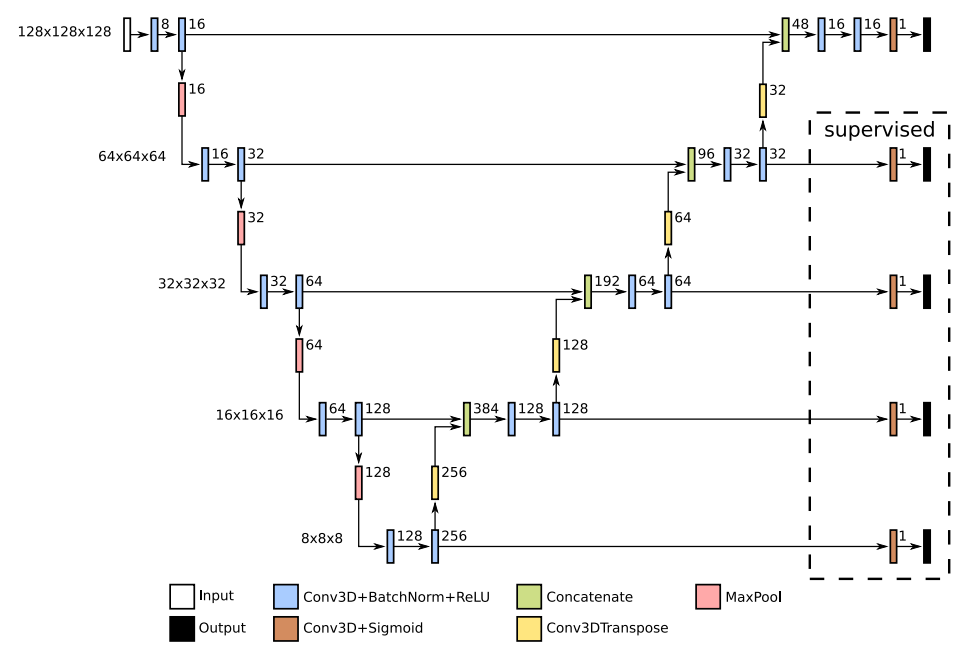
13]. However, it will be proven in this research that we can develop an effective 3D detection method through appropriately supervised learning, despite the relatively small training set. This paper thus introduces advanced solutions based on three-dimensional CNNs for the follicle and ovary detection in ovarian ultrasound volumes. Our solutions are based on the established U-Net architecture [
14,
15]. We have developed advanced methods for 3D object detection in volumes by using the Deep Supervision technique [
16], and by replication of either the entire U-Net architecture or certain parts of the U-Net decoder. The proposed approaches were designed primarily for 3D follicle and ovary detection in ultrasound volumes. The effectiveness of the proposed methods was verified by using the USOVA3D database.
The contribution of this research work is summarised in:
The development of sophisticated two-stage CNN-based algorithms for 3D object detection, whereat the algorithms are built on the U-Net architecture and Deep Supervision;
Introduction of the most effective 3D algorithms for follicle and ovary detection, obtained by appropriately controlled training;
Effectiveness assessment of CNN-based object detection approaches by statistical evaluation of multiple model training repetitions.
This article is structured as follows. A short overview of the USOVA3D public database and employed evaluation protocol is given in
Section 2. Novel 3D object detection algorithms based on the U-Net architecture are described in detail in
Section 3. In addition, guidelines are provided on how to adapt these methods to detect follicles and ovaries.
Section 4 presents some of the results obtained on the USOVA3D database, followed by
Section 5, which emphasises certain aspects of our detection methods.
Section 6 concludes this paper briefly with some hints about future work.
4. Results
Our proposed 3D object detection methods based on established U-Net architecture were evaluated by using the testing set of the USOVA3D database. This testing set contains 19 ovarian ultrasound volumes, whereas manual annotations from two raters for follicles and ovaries are part of a precisely specified validation protocol (see
Section 2.1). The USOVA3D database is supplemented by the 3D DWT and 2D UNET baseline functions [
7] which set the baseline statistical metrics of follicle and ovary detection effectiveness. For that reason, these baseline metrics, as well as the inter-rater variabilities, were incorporated into the results. Algorithms were ranked using an overall (algorithm) score
, whereat a higher value indicates a more effective detection algorithm.
Table 1 contains the results of ovarian follicle detection for the original 3D U-Net (3D UNET) and by Deep Supervision (DS) upgraded (+) 3D U-Net method (3D UNET + DS). Each method was trained and evaluated 50 times on the USOVA3D database. Minimum, maximum, mean and median are presented of the algorithm’s effectiveness over 50 runs. The ‘best’ designates that the CNN model with the lowest validation loss was selected, while the ‘last’ means that the model was picked in a particular run after the final training step. Although both proposed U-Net extensions, i.e., EXT 1 and EXT 2, were not developed primarily for follicle detection, we trained them to detect follicles according to the above described procedure (see also the previous section) and in an ‘end-to-end’ manner. These results were added to the
Table 1 as well.
Afterwards, a comparison was made with both USOVA3D baseline functions, with the state-of-the-art SNET method [
11], and with the variability of both raters by follicle annotating. Inter-rater variability represents the upper limit of performance to which we aspire. This comparison can be seen in
Table 2. We entered the results in this table only for the more effective CNN model, which we got among 50 runs for our individual method (i.e., a run where the max from
Table 1 was obtained). In one row, there are aggregated results over all 19 test volumes for a particular method: Min and max denote the effectiveness (i.e., the final score), on the worst or best detected volume respectively, followed by median statistics over 19 test volumes, and, finally, the overall algorithm score is given. The implementation of the SNET [
11] is not available publicly, so we implemented this method by ourselves based on published information. We applied the specified hyperparameters from [
11]. The same training protocol (i.e., 50 runs) was utilised as by all our methods, and only the max obtained result was entered in
Table 2.
The evaluation protocol used in this study (see
Section 2.1) was published recently in [
7], and is, therefore, not yet used regularly by publishing results. For this reason, we have evaluated the effectiveness of selected follicle detection methods further using Sensitivity or Recall (S), Precision (P), Dice Similarity Coefficient (DSC), Jaccard Index (JCI) and the F1 score (F1), which are established metrics, but each of them covers only one aspect of the algorithm’s detection performance (On the other hand, our used evaluation protocol combines several aspects over several raters into a common assessment or overall score, respectively!). Data in the USOVA3D database were annotated by two raters, therefore, the algorithm’s segmentation result on each volume was compared with each of the annotations, and, finally, the average and Standard Deviation of the selected metric were calculated over all 19 testing volumes and both raters. The metrics calculated in this way are gathered in
Table 3. Only the more successful variants of the proposed and compared methods have been added to this table (see also
Table 2).
For illustration, we also calculated the effectiveness of better follicle detection methods at the level of all detected voxels, i.e., we did not consider to which follicle the voxel belonged. Actually, we evaluated the effectiveness of a binary segmentation of selected 3D detection methods (segmented voxel value 1 determines the Region of Interest, while value 0 means the background). Besides the classical metrics written above, we also calculated the Accuracy (ACC) metric. We were not able to calculate the Accuracy at the ‘follicle level’, as our CNN networks do not return information about True Negatives. It should also be noted that the Dice Similarity Coefficient and the F1 score are the same in the case of Boolean or binary data analysis. The calculated metrics are collected in
Table 4.
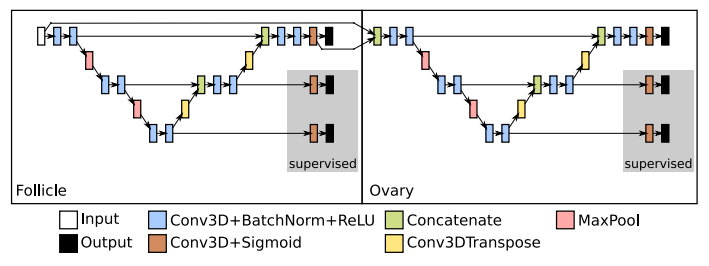
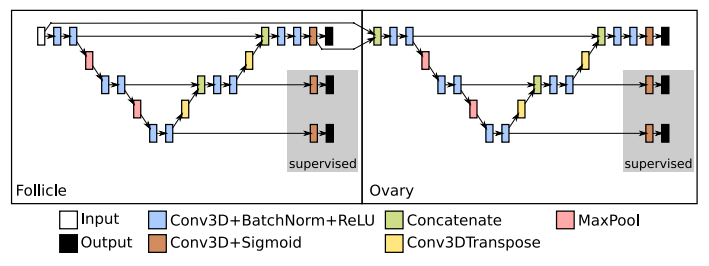
Our methods were then evaluated in respect to the effectiveness of ovary detection. If the 3D U-Net (with or without Deep Supervision) was trained in detecting ovaries directly (as by follicle detection), such an approach was significantly less successful than the baseline methods. A similar result was observed if our U-Net extensions were trained to detect follicles and ovaries simultaneously. Some results of these non-successful experiments are not reported. To detect the ovaries, we therefore utilised variations of both the U-Net extensions (i.e., EXT 1 and EXT 2) proposed in
Section 3.3, whereas the network from the first stage was pretrained on the problem of ovarian follicle detection. A kind of Transfer Learning (see
Section 3.5) was employed, because the weights of the network from the first stage were frozen, and were no longer adapted during the ovary detection training.
Table 5 contains the results of ovary detection for both the proposed pretrained U-Net extensions (EXT 1 and EXT 2), with or without Deep Supervision (+DS). Each method was trained and evaluated 50 times on the USOVA3D database. Minimum, maximum, mean, and median are presented of the algorithm’s effectiveness over 50 runs. The ‘best’ designates that the CNN model with the lowest validation loss was selected, while the ‘last’ means that the model was picked in a particular run after the final training step.
In a similar way to the follicles, a comparison was also made with the state-of-the-art method SNET [
11], USOVA3D baseline functions, and with the variability of both raters in ovary annotating. The results are gathered in
Table 6. The more successful variants of the detection methods from this table were also evaluated using the Dice Similarity Coefficient and Jaccard Index (Sensitivity, Precision, and F1 score equals 1 for all ovary detection methods!). The mean and Standard Deviation of both metrics are presented in
Table 7.
Similarly as for follicles, we also calculated the effectiveness of better ovary detection methods at the level of all detected voxels, i.e., all metrics were calculated across all properly segmented voxels and not at the level of the entire ovary. The results are gathered in
Table 8.
5. Discussion
Training (Convolutional) Neural Networks is, to some extent, a stochastic process. With constant input data, the transformation function that the CNN will learn also depends on the type of chosen optimisation algorithm, and the procedure by which synaptic weights are initialised. Based on a variety of experiments and studies, the research community has developed recommendations for selecting the more appropriate optimisation and weight initialisation procedures [
23]. We followed these guidelines in this study as well. Even if the optimisation function and the weight initialisation procedure are fixed, as they were in this study, the CNN training is still stochastic. The reason is that synaptic weights are set initially to random values determined by some initialisation procedure. We argue that a new CNN is established after each repetition of training, whereas such CNN will, of course, implement a novel transformation function. The latter does not apply only in the exceptional case when the synaptic weights would be initialised to fixed values, thus obtaining an identical CNN after every training. However, the stochastic procedure for synaptic weights’ initialisation is employed commonly in practice (also in this research).
It is a standard convention in reporting the effectiveness of learning-based approaches that only a single best result is presented obtained with the selected CNN architecture. Unfortunately, such compact presentation also has drawbacks, as it is not evident whether the improvement in detection performance was only due to the stochasticity of weight initialisation, or whether it is really a methodological refinement of detection. For the reasons described, the training of our detection methods was repeated 50 times in this study. Various statistics for these 50 training runs, such as minimum, maximum, expected average and median effectiveness, were then summarised in the results (see
Table 1 and
Table 5). By comparison with the state-of-the-art, only the results of the best runs (models) were indeed incorporated in
Table 2 and
Table 6, but, in this discussion, we will evaluate the results more critically.
To begin with, it should be stressed that a kind of ablation study [
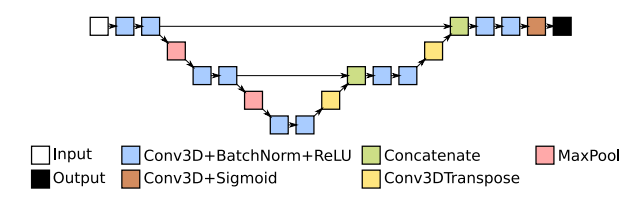
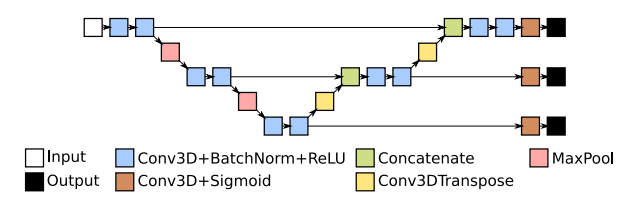
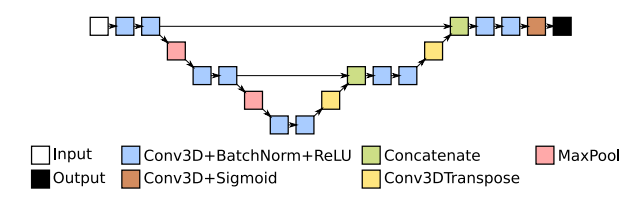
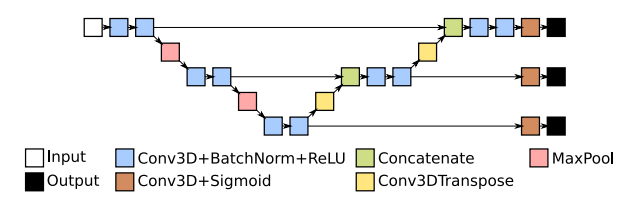
24] was conducted in this article. Namely, we monitored the performance of our detection ‘system’ by removing/adding certain components, to understand the contribution of the component to the overall system. Let us focus on the follicles first. We noticed that the effectiveness of the original 3D U-Net (3D UNET) was in the range of results of the 2D UNET baseline method. The results have improved remarkably with the incorporation of Deep Supervision into 3D UNET (see
Figure 3), which undoubtedly indicates the positive influence of this component on the follicle detection. With the proposed EXT1 and EXT 2 extensions, we were not able to improve the statistically significant the results of the ‘3D UNET + DS (last)’ method. The ‘3D UNET + DS (last)’ and ‘EXT 2 + DS (last)’ methods do not differ statistically significantly (Wilcoxon rank sum test at 5% significance level) based on 50 runs. However, it is also true that, by using our proposed methods, we obtained maximum overall algorithm’s scores higher than the ‘3D UNET + DS (last)’ method. On the other hand, the effectiveness of all the other follicle and ovary detection methods, from
Table 1 and
Table 5, trained and evaluated 50 times on the USOVA3D database, do differ statistically significantly (the same Wilcoxon test was applied).
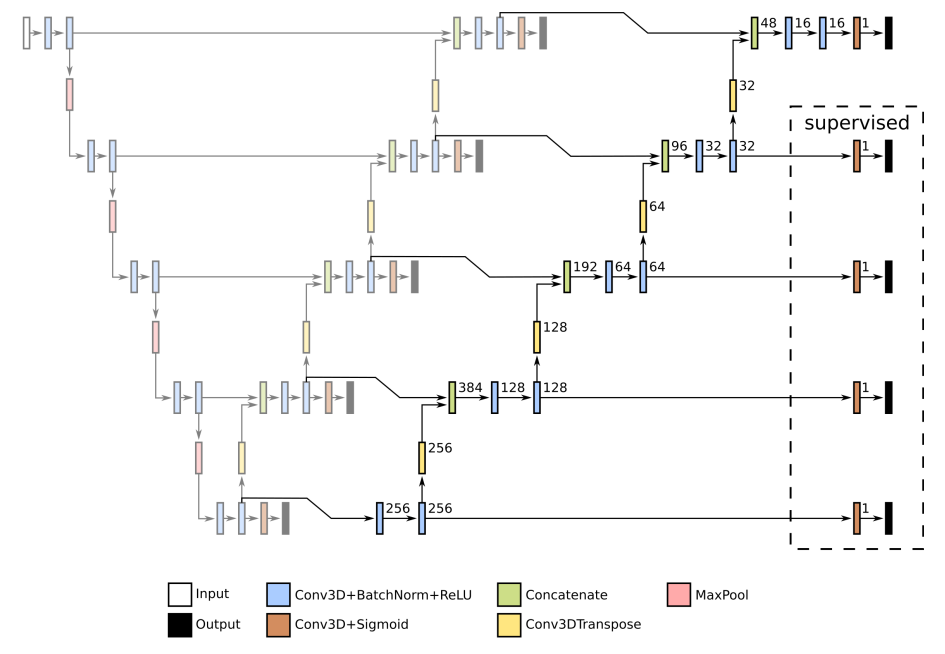
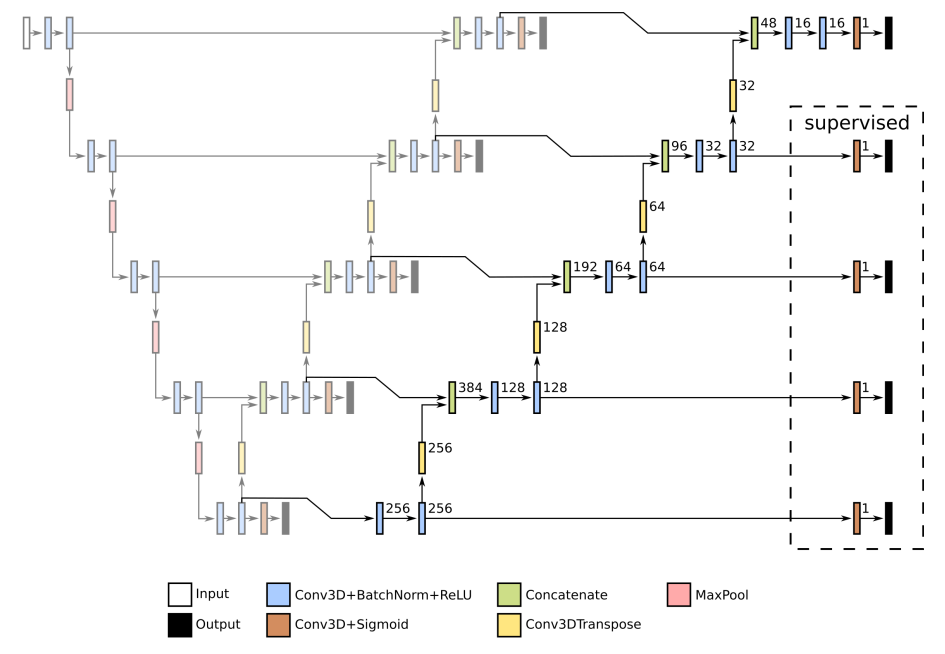
More consideration is needed by the ovary detection. In this work, we have expanded the original 3D U-Net once by duplicating the entire architecture (EXT 1 extension), and the second time by duplicating the decoder components (EXT 2 extension), as detailed in
Section 3.3. The EXT 2 extension hardly improved the 3D UNET results, while the application of EXT 1 contributed on average up to a 2.7 higher overall algorithm score. The introduction of Deep Supervision in EXT 1 and EXT 2 also improved the results notably in the case of the ovaries. The average overall score increased at best by 6.1 (EXT 1) and 7.5 (EXT 2) respectively, simultaneously increasing training stability (see Mean and Standard Deviation in
Table 5). A similar trend was observed for the median of the overall algorithm score. It should be noted that the mere integration of Deep Supervision into the original 3D U-Net has practically not improved the effectiveness of ovary detection.
An additional comment is needed when assessing the results using the best models on the validation set (denoted ‘best’), or the models after the last training step (‘last’), respectively. One would expect that, if a model is effective on a validation set, it will also be effective on a testing set, and vice versa. However, a certain inconsistency was noticed in
Section 4. The reason is sought in the small USOVA3D database for which the testing set was determined manually without serious analysis [
7]. The training set (with the validation set as part of it) does not summarise/reflect the statistics of the data in the testing set credibly, and, as a consequence, there were oscillations in performance by the ‘best’ and ‘last’ models.
Let us analyse the effectiveness of follicle and ovary detection using our proposed methods in this sequel. For follicle detection, it pointed out that the effectiveness of the 3D DWT baseline function was surpassed with the best runs of the ‘3D UNET + DS’ method and our proposed methods (see
Table 2). As mentioned earlier, it can be misleading to observe only the results of the best training run. From
Table 1 it can be noticed that the median of the ‘3D UNET + DS (last)’ and ‘EXT 2 + DS (last)’ methods are almost equal to the result of the 3D DWT baseline function. Based on the median and mean values, we concluded that a result better or equal to the USOVA3D baseline result would be got from every other run of these two methods. The latter undoubtedly confirms that our proposed method also improved the successfulness of the 3D DWT baseline function, and that the higher overall algorithm score was not merely due to the different initialisations of the CNN models. A similar conclusion can be drawn for our 3D ovary detection methods. The obtained results with the best runs of our approaches were at least in the rank of the better 2D UNET baseline function, or the baseline results were exceeded in most cases, respectively. When using both U-Net extensions with integrated Deep Supervision, the results of the best runs were alongside the inter-rater variability, while, in the case of the ‘EXT 1 + DS’ method, this variability was even exceeded. The mean and median statistics in
Table 5 are more conclusive, which first reveal that, so far, the best 2D UNET (baseline) method was surpassed by both the ‘EXT 1 + DS’ and ‘EXT 2 + DS’ methods, and, at the same time, our proposed methods are still behind the accuracy of the raters. We notice in
Table 6 that the inter-rater variability for the ovaries is importantly higher than for the follicles (i.e., lower
for ovaries than for follicles). This discrepancy in the raters’ annotations (labels) certainly affects the CNN models’ training with greater instability, thereby influencing the variation of the obtained results and their scatter (e.g., higher Standard Deviation). Let us emphasise once again that the labels of both raters were considered equally in the training.
Adding noise to training data is one of regularisation techniques that reduces the possibility of CNN overfitting [
23]. Based on the Dice Similarity Coefficient calculated between both raters, we ascertained that the raters annotated the same ovarian ultrasound volume to some extent differently. Nevertheless, we passed both non-identical annotations for the same structure (i.e., for ovary or follicle) into the training, which, of course, introduced some noise into the data, but at the same time prevented the CNN from overfitting. It should also be emphasised that the ultrasound is a rather demanding modality, which is reflected in the subjective interpretation of the imaging material. Particularly pressing is the accurate determination of object boundaries (e.g., for ovaries and follicles), which are often inexpressive and jagged. The complexity of interpreting ultrasound data from the USOVA3D database is, thus, reflected in the higher inter-observer variability (e.g., DSC and JCI coefficients much lower than 1).
In our study, we chose S-Net [
11], which is also based on the U-Net architecture, as a state-of-the-art for a comparison with our methods. Mathur et al. have shown in [
11] that S-Net is currently the most effective follicle and ovary detection method. The latter was substantiated by 0.93 mean Sensitivity and by 0.92 (ovary) and 0.87 (follicle) mean Dice Similarity Coefficient (DSC) by detection, respectively. All metrics were calculated on 20 testing ovarian ultrasound volumes from their private database. To the best of our knowledge, their testing data and the code of S-Net are not publicly available, therefore, we implemented this method by ourselves, and tested it on the public USOVA3D database. The obtained results were evaluated both with our evaluation protocol and with the usual metrics (i.e., DSC, Jaccard index). It pointed out that our proposed ‘EXT 1 + DS’ and ‘EXT 2 + DS’ methods outperformed S-Net in virtually all metrics, both in follicle and ovary detection (see
Table 2,
Table 3,
Table 6 and
Table 7). Besides, we note that the ranking of detection methods based on our evaluation protocol or based on established metrics is consistent, whereat the advantage of our protocol being that we obtain a single effectiveness estimate for each method and, therefore, the methods do not need to be re-ranked according to each of the individual metrics. The following should be also emphasised when comparing effectiveness of our methods and S-Net. S-Net achieved very high mean sensitivity (0.93) and mean DSC (around 0.9) by detection on private testing data. For the public USOVA3D database, however, we observe that even inter-rater variability with 0.88 Sensitivity and Dice Similarity Coefficient of 0.88 (ovary) or 0.86 (follicles) is far behind the S-Net results. The latter indicates undoubtedly that USOVA3D is an extremely challenging database.
In our opinion, a direct comparison of the calculated effectiveness metrics for our methods with the effectiveness metrics of similar works is not relevant, as different research groups have evaluated their solutions (some were designed for 2D ultrasound data) on their private ovarian ultrasound data. The problem of the large variation in the algorithm’s effectiveness metrics, calculated on different data, was, in this study, demonstrated above in the case of the state-of-the-art S-Net method. Cigale et al. [
9] compared in detail their 3D DWT detection method with selected advanced algorithms (including the SonoAVC algorithm integrated into General Electric ultrasound devices) on the same, i.e., today publicly available ovarian ultrasound data (at that time the USOVA3D database was not yet published). They demonstrated the superiority of their method by all criteria. This 3D DWT method was then added to the USOVA3D database as a baseline function 1. In this study, however, we proved experimentally that our proposed solutions surpassed the 3D DWT method in respect to the effectiveness. Based on all the results and analyses, our methods can also be considered the state-of-the-art in the field of Ovary and follicle detection.
Our study is not a clinical study, so information about clinically acceptable detection errors was not available. The comparison was, therefore, made with an inter-observer variability. The DSC coefficient was lower by less than 2% and the JCI index was lower by less than 3% in respect to the inter-observer variability (i.e., an estimate of detection accuracy that we can expect from experts) when detecting ovaries with our best ‘EXT 1 + DS’ method. In the detection of follicles, however, Sensitivity was lower by about 8%, the DSC coefficient by about 6% and the JCI index by about 7% in respect to the inter-observer variability. In summary, our best methods are, for ovary detection, in the range of the experts’ accuracy, while for follicle detection, we are still behind the experts, and, therefore, it would be necessary to verify the results manually in the clinical practice.
Figure 8 depicts some typical qualitative results for the better compared methods. Computer detected follicles and ovary are superimposed on the selected cross-sections of ovarian ultrasound volume. The difficulty of detection in the USOVA3D database can be seen clearly, as the edges of the follicles and ovary are very indistinct. Annotations of rater 1 for this volume and these cross-sections are shown in
Figure 1.
Let us also consider the capacity of our CNN models. The original 3D U-Net has a little over 4.82 Million (M) of free parameters, while this number increased by 484 when the Deep Supervision was integrated. Both 3D U-Net extensions were designed primarily to detect the ovaries, however, they were also applied successfully for follicle detection. The EXT 1 architecture has a total of 9.64 M parameters, of which 4.82 M parameters are frozen or fixed by Transfer Learning (if the case of ovary detection), respectively. The frozen parameters are for the first stage of the EXT 1 model. The proposed EXT 2 extension is more complex, as it has a total of 11.41 M parameters, whereas also 4.82 M parameters from the first stage are frozen or pretrained (by ovary detection), respectively. The integration of Deep Supervison in the 3D U-Net extensions contributed an additional 968 parameters, of which 484 were trainable (by ovary detection). In contrast, although 2D UNET has a total of 31.13 M parameters, which is almost 3 times more than our proposed methods, its effectiveness of follicle and ovary detection is remarkably inferior to our methods. Our deep models were indeed trained on a small number of volumes (16) as there are no more training data available in the USOVA3D database. The lack of data was mitigated by meaningful preprocessing and the use of augmentation. The fact that we train our CNN models of segmentation, where each output voxel represents its own training sample, also contributed to the successful training of our models. The number of voxels in our volumes is, of course, extremely large. (It is also true that samples are not completely independent.) We did not diagnose the overfitting problem when training our CNNs by USOVA3D data.
CNN training is computationally demanding. An exhaustive experimentation with 50 repetitions of CNN models’ training was performed by using the HPC RIVR MAISTER powerful public supercomputer in Maribor, Slovenia (
https://www.hpc-rivr.si, accessed on 1 January 2022). Six dual-processor compute nodes, each with 4 additional Nvidia Tesla V100 Graphics Processing Units, GPU (each GPU had 32 GB of RAM), with a total of 122,952 cores, were utilised on this supercomputer. Follicle detection training took about 3 s per step, or about 70 s per epoch. On the other hand, the EXT 1 and EXT 2 extensions, developed primarily for the ovary detection, took up to 5 s for the training step and about 120 s per epoch, respectively. The trained network conducted an inference in around 9 s per volume, which also includes all volume resizing, and storing the result on the secondary memory.
6. Conclusions
The main intention of this paper was to introduce efficient 3D object detection algorithms, aimed primarily to detect follicles and ovaries in ultrasound volumes. We took a learning-based design approach, relying on the established U-Net architecture, and upgrading it in this research. Two methods for indirect or two-stage object detection were developed respectively, namely, in the first solution the entire U-Net architecture was duplicated, while, in the second solution, just certain parts of the U-Net model decoder were replicated. The first stage of such CNN introduces a kind of prior knowledge into the detection process, as it directs the ‘second stage’ to that part of the 3D space (volume) where the searched object is more likely to be located. Deep Supervision was integrated into both CNNs as well, which had a positive effect on the training of the lower layers of the Neural Network. The proposed methods were verified by the detection of follicles and ovaries in ultrasound volumes. The methods were trained end-to-end by follicle detection, while an idea of Transfer Learning was utilised by ovary detection. The latter means that the ‘first stage’ of the CNN was trained separately on the problem of follicle detection, and, afterwards, the trained ‘first stage’ was, by Transfer Learning, employed by training the ‘second stage’ to detect ovaries.
The follicle detection results pointed out that our proposed U-Net extensions did not statistically significantly improve the results of the with Deep Supervision integrated 3D U-Net. However, we obtained higher effectiveness than 3D U-Net (+ Deep Supervision) by some repetitions of our CNNs’ training. On the other hand, the superiority of our proposed methods was indisputable in the detection of ovaries. The results pointed out up to 7.6% more accurate detection compared to the up-to-date automated ovary detection methods. Our two-stage CNNs estimated follicles only slightly worse than the raters, while our methods estimated the ovaries with almost the same accuracy as the raters. We verified by quantitative metrics that our proposed methods, both in the case of follicle and ovary detection, are more effective than the USOVA3D baseline functions and the state-of-the-art method S-Net [
11] on the very challenging USOVA3D testing data.
We demonstrated that the improvements are not only due to the random initialisation of the CNN models, but that, by using the proposed modifications of the U-Net architecture, the follicles and ovaries were detected more accurately in a systematic way. By analysing 50 repetitions of training (and testing) of our CNNs statistically, we proved that the training is stable, and that in practically every other repetition the CNN is constructed, which is more efficient than the most accurate methods for detecting follicles and ovaries so far. In addition, it was substantiated that, despite using the small USOVA3D database, the detection algorithms can be trained quite successfully and without any data overfitting. A convergence was reached in a reasonable number of training steps.
Let us conclude this paper with some future work directions. One of the succeeding researches will be focused on applying and transferring our solutions to other problem domains. The aim will be to demonstrate that only minimal interventions are needed in our proposed detection algorithms. In the field of Ovarian Ultrasound Volumes’ Processing, we will upgrade our solutions further, in order to detect ovaries accurately in just one pass, without adding prior knowledge about follicles. Special attention will be paid to the augmentation of the small USOVA3D training set. Finally, we recommend that the statistical assessment of repetitive training and testing becomes the rule when also reporting results in the field of CNN-based approaches.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}