
Coastal Flooding Assessment Induced by Barometric Pressure, Wind-Generated Waves and Tidal-Induced Oscillations: Kaštela Bay Real-Time Early Warning System Mobile Application

 ,
,  , ,
, ,  ,
, 
Abstract
1. Introduction
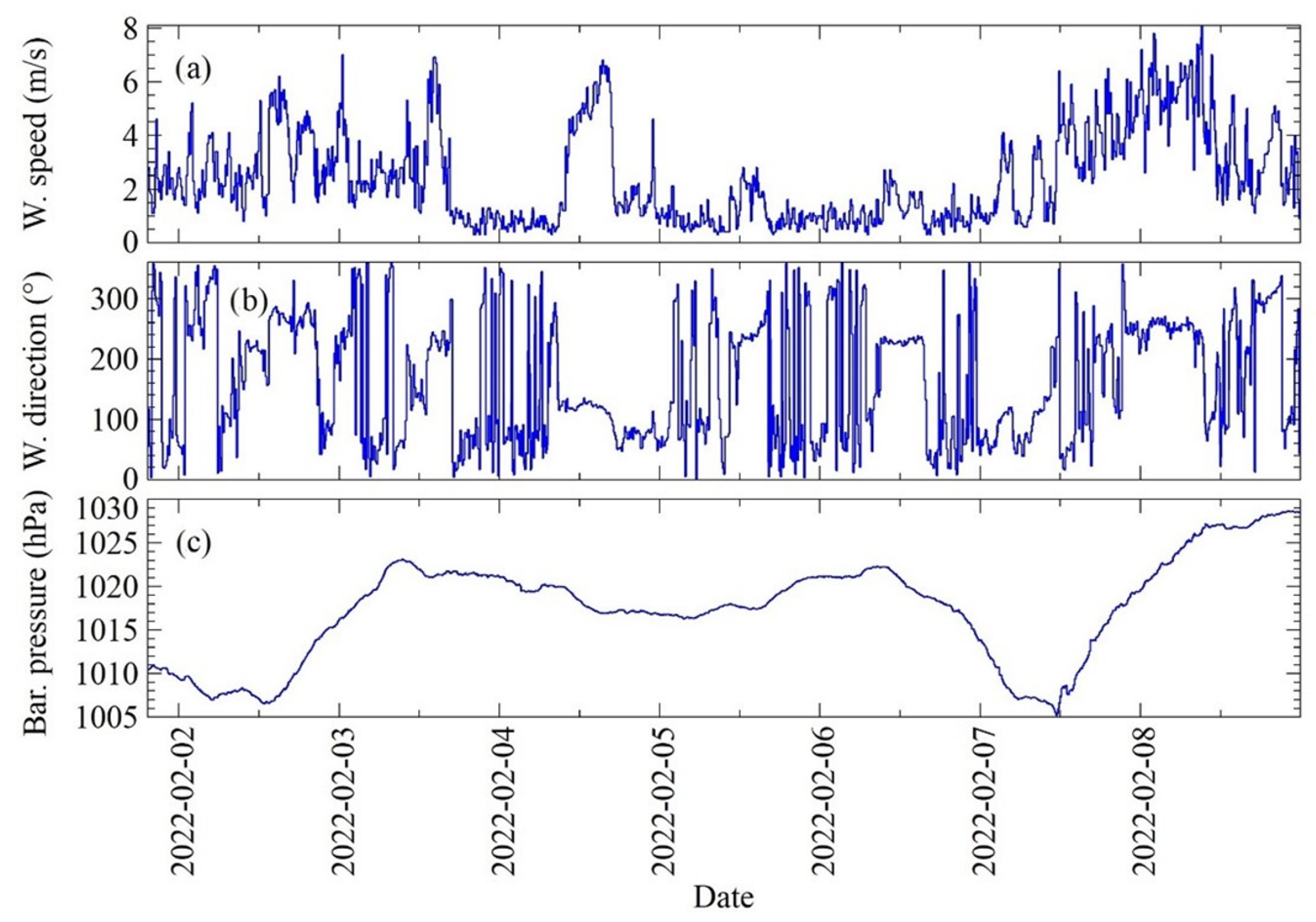
- A monitoring system consisting of an installation of hardware at the site location and appropriate software for real-time data collection. This system observes the wind speed and the barometric pressure.
- Application of mathematical and numerical models for sea level prediction on the coastline: Numerical model is used to analyze the wave transform mechanism. A specific procedure has been established to incorporate simultaneous effects of wind-generated waves, tides and barometric pressure-induced changes in the sea level to determine sea level at the coastline based on the systematic observations of the abovementioned parameters via a real-time monitoring system (wind speed and direction and barometric pressure). Tidal-induced sea level changes have been obtained based on the past observations of the long-term sea level tidal oscillations from the relevant tidal gauge.
- Estimation of the risk of flooding for humans: Using a digital terrain model where each pixel is georeferenced (X, Y coordinates) and assigned altitude Z, the calculated sea heights will be compared with the altitudes, and if the sea elevation is greater than the altitude Z of a pixel, that pixel will be marked as flooded. According to the depth of the sea on land, the risk of flooding for humans will be defined based on an analytical function so that it can be easily integrated into the rest of the system. This information is necessary for the input into the early warning system. For a simple and understandable presentation of the flooding risk, the analyzed coastal area is divided into zones in order to define the total sea level. This division is made according to the criteria of the coast type and the coast height, which have a direct impact on the height of the waves.
- Dissemination and communication of risk information by mobile application: Flood warnings will be given to people who have the mobile application, which was developed for the purpose of the dissemination of information about flood risk in the observed area. Those that have installed the application on their mobile phone and enabled that app to send them push notifications will receive the information.
2. Methodology and Site Description
2.1. Sea Water Elevation Prediction
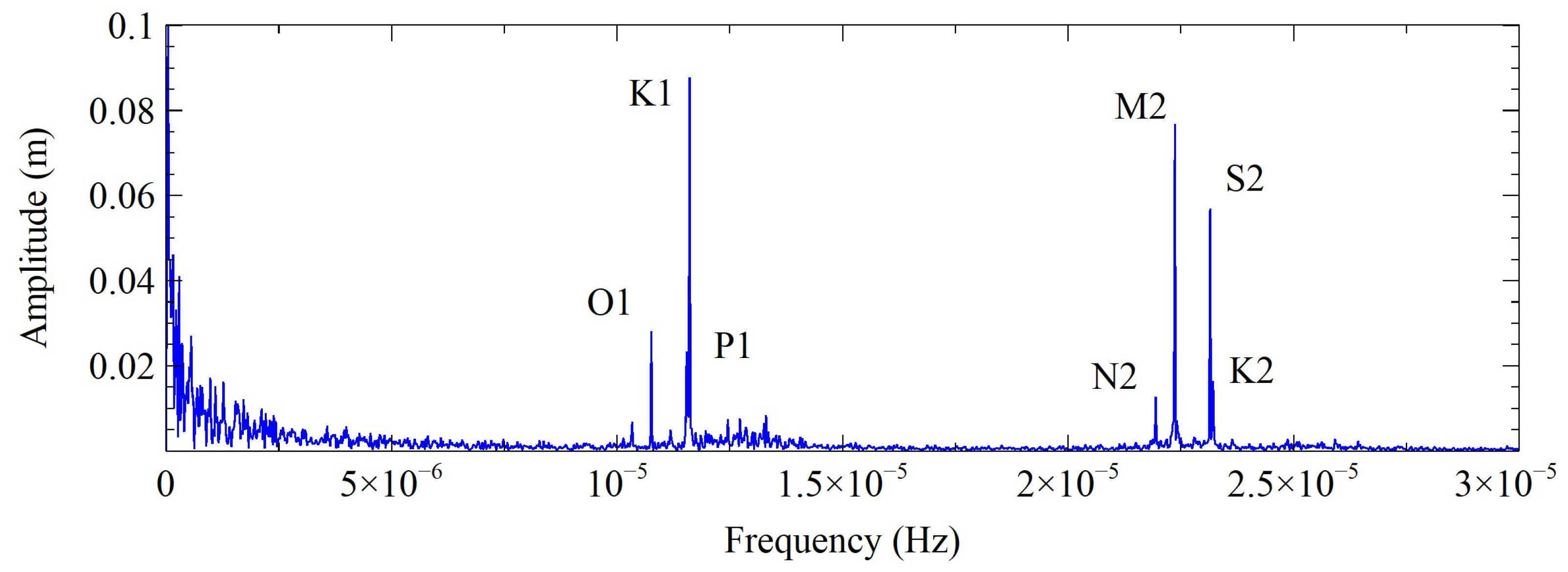
- From observed tidally induced oscillations, the harmonic parameters (amplitude, period and phase) are initially determined based on the Least Square Method application;
- After all harmonic parameters have been determined, tidal-induced sea level oscillation is determined by using Equation (1);
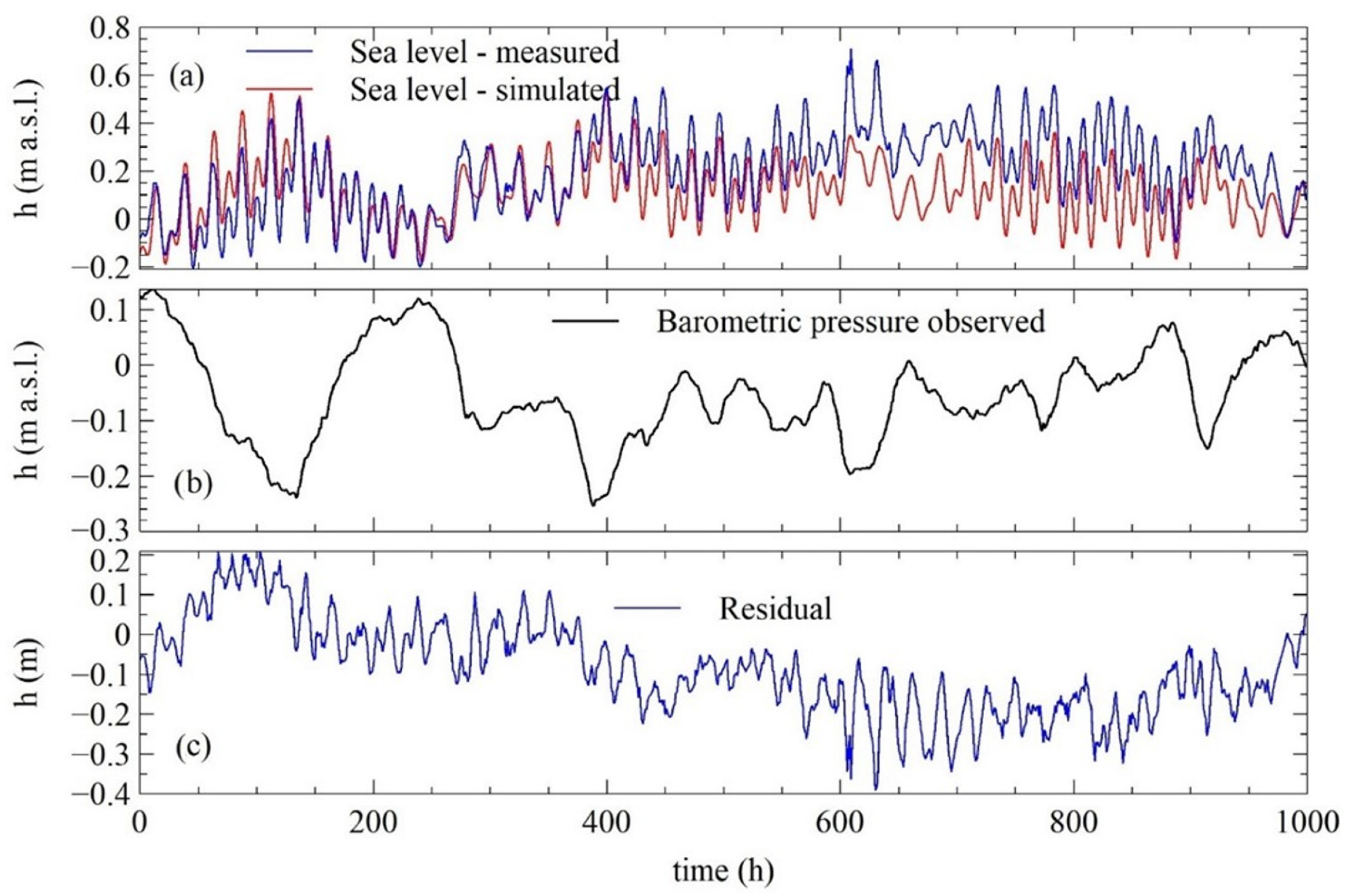
- From observed barometric pressure data, the change in sea level induced by the drop/rise of the barometric pressure is determined from Equation (3);
- Deep water wave parameters are determined depending on incident direction and wind velocity and duration parameters;
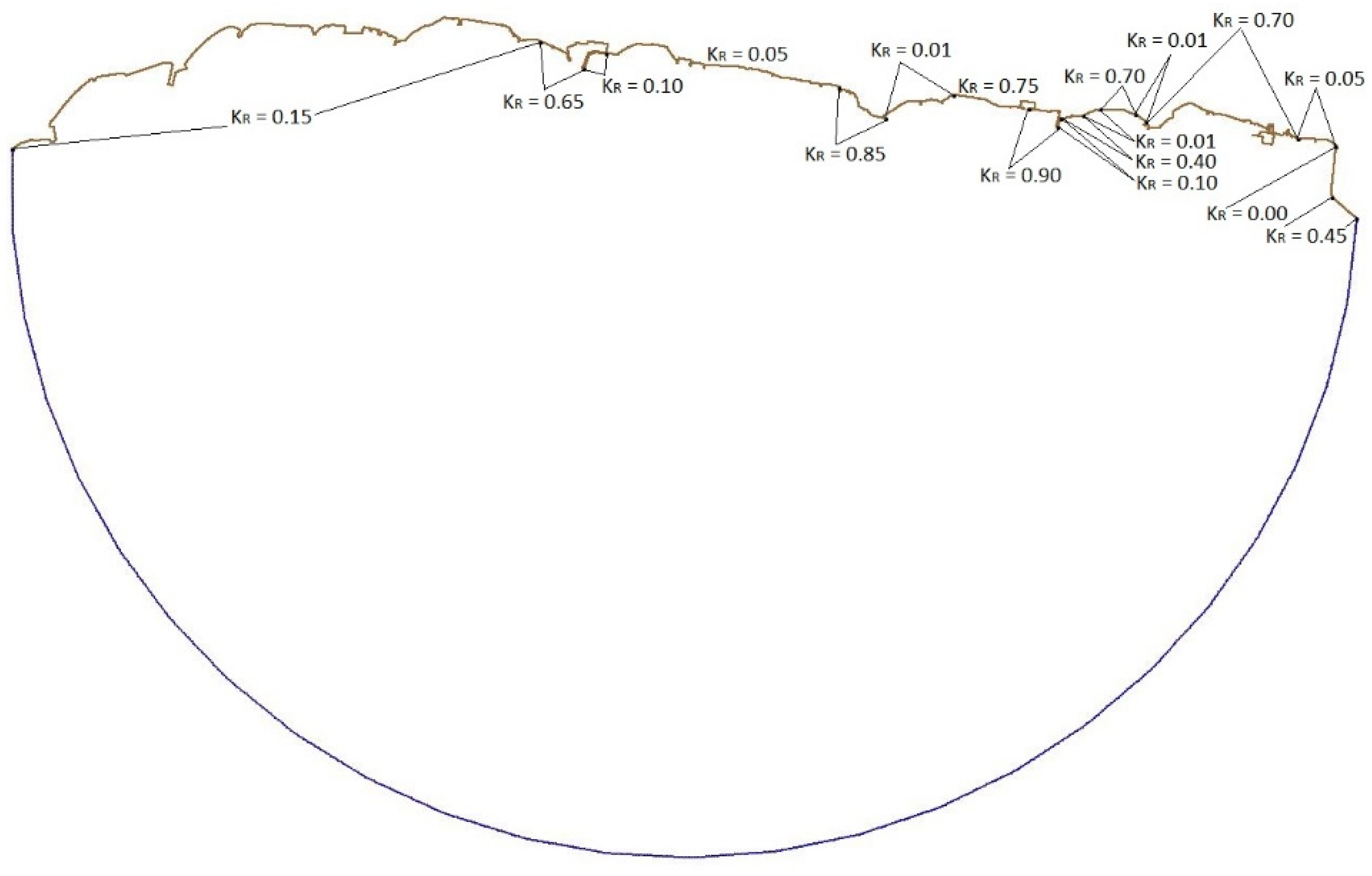
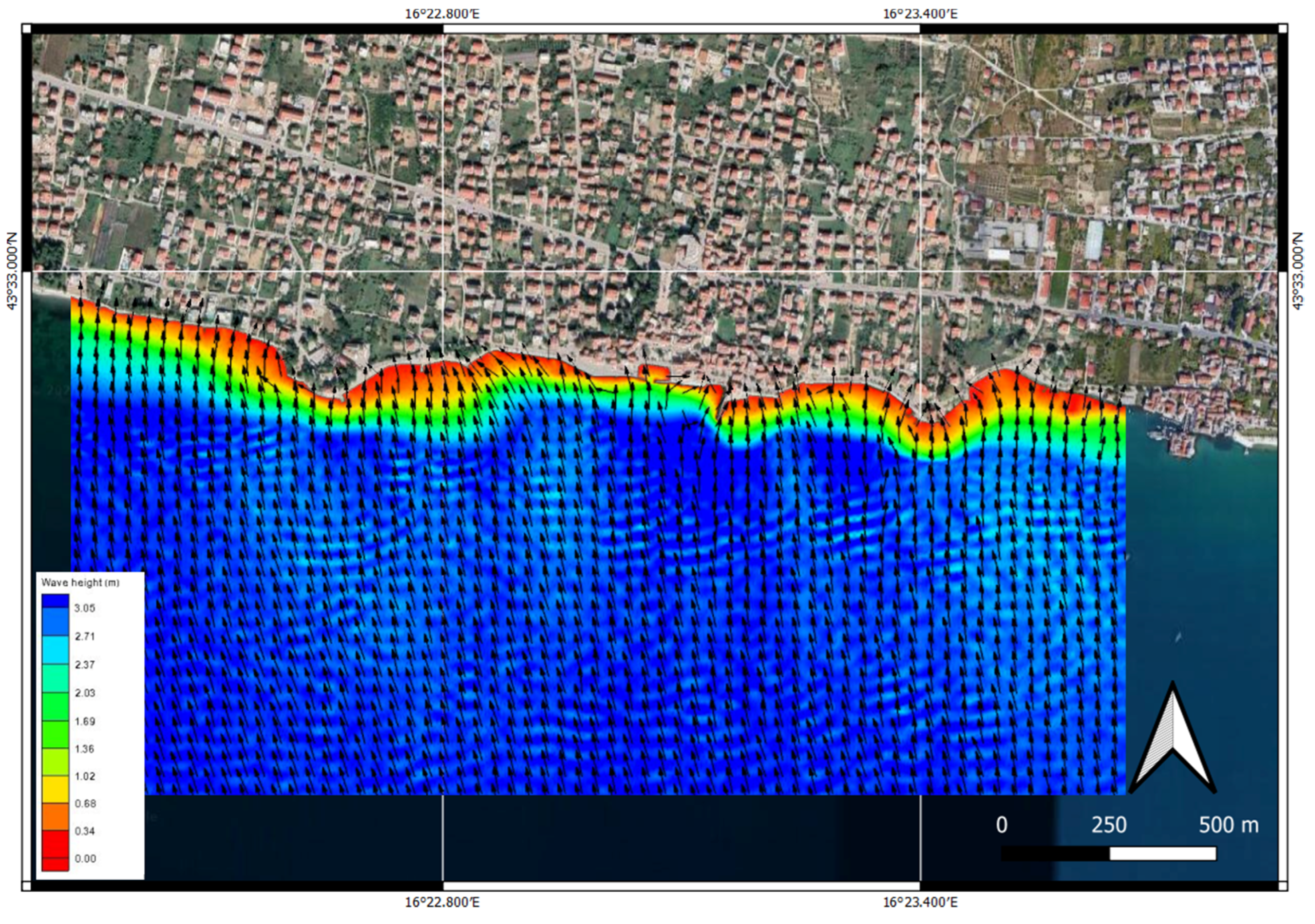
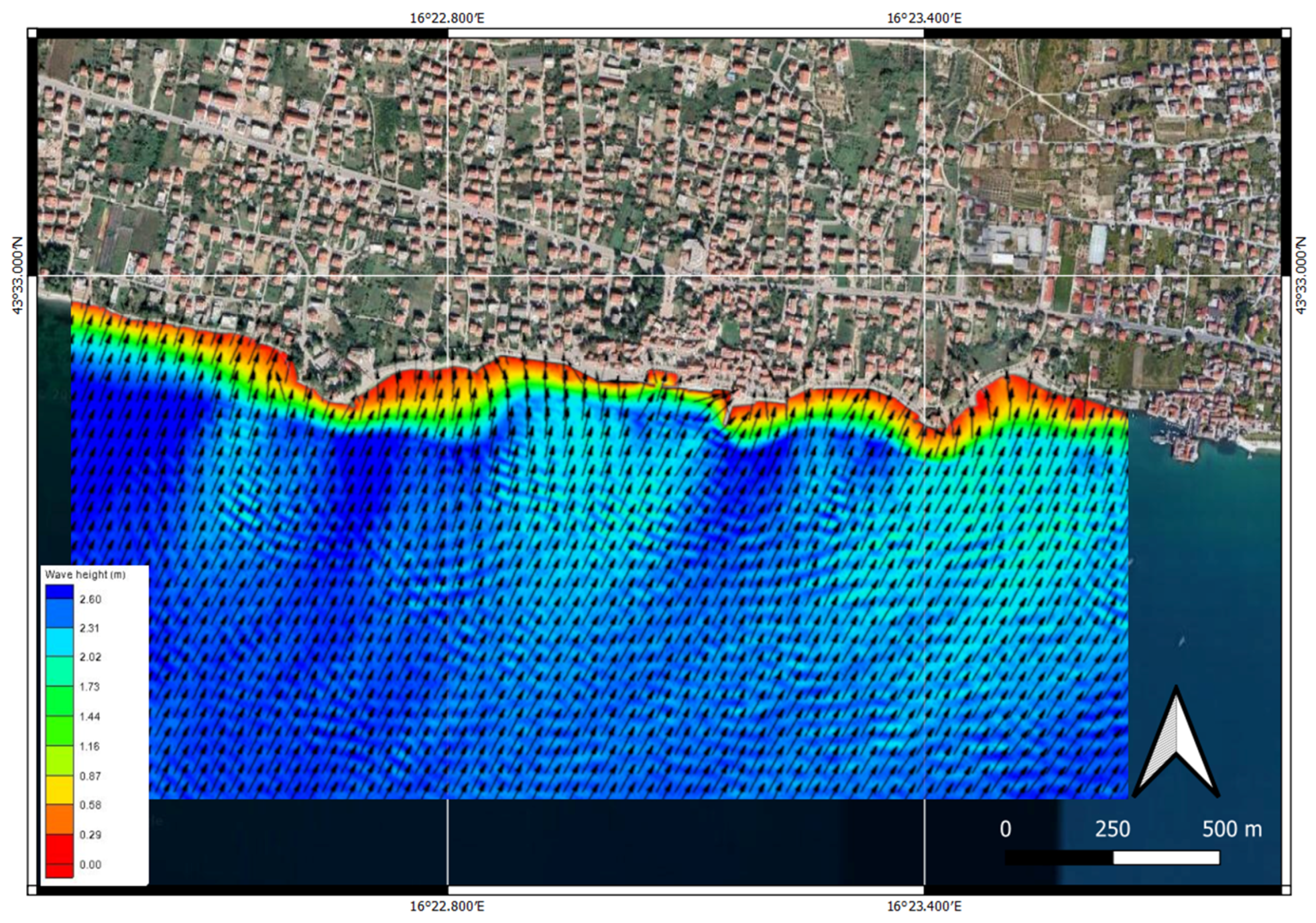
- For relevant incident directions, numerical simulation of the wave transform has been performed by incorporating shoreline reflection coefficients determined on site;
- The study area has been divided into ten zones fundamentally different with regard to reflection features;
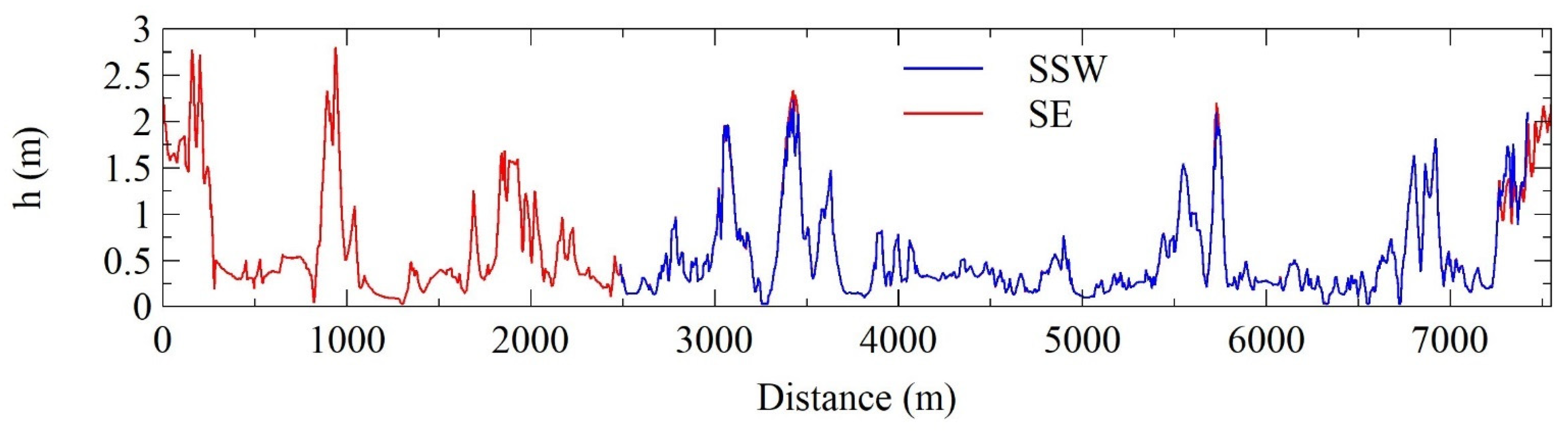
- For each zone wave, parameters have been determined within the zone close to the shoreline (4 m away from the shoreline);
- Final determination of the sea water elevation by incorporating three abovementioned mechanisms is done by:which offers an easy-to-implement way to assess absolute sea level, where represents the tidally induced component, represents the barometric pressure-induced component and stands for the significant wind-generated height as found 4 m offshore. The value of is expressed relative to HVRS71 datum [33].
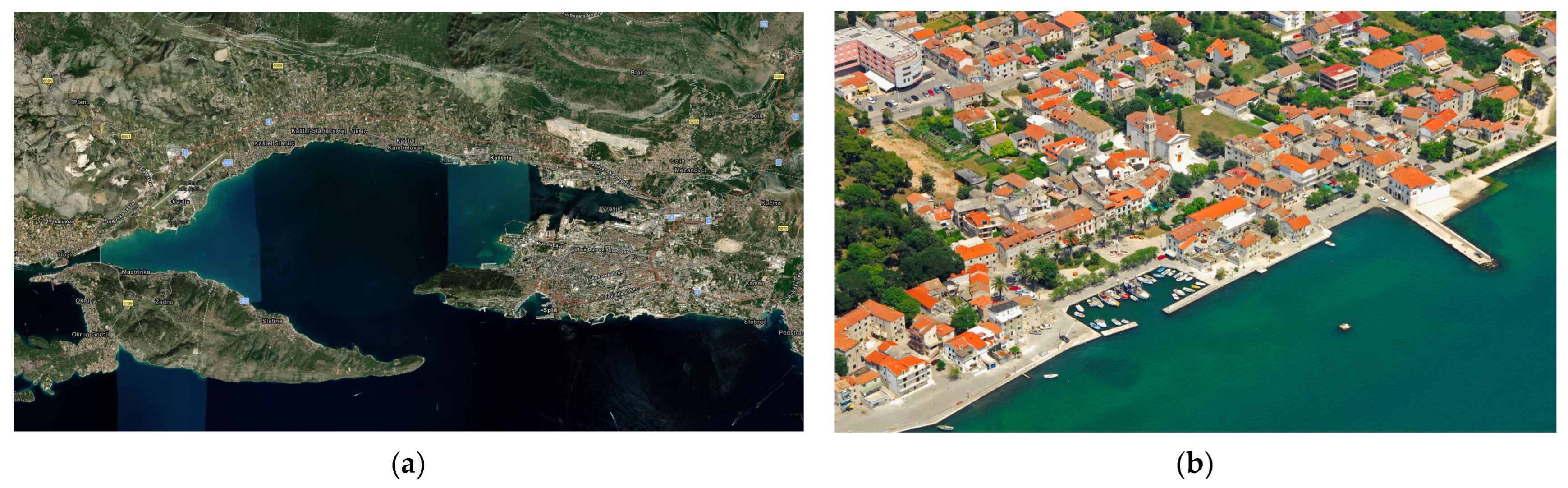
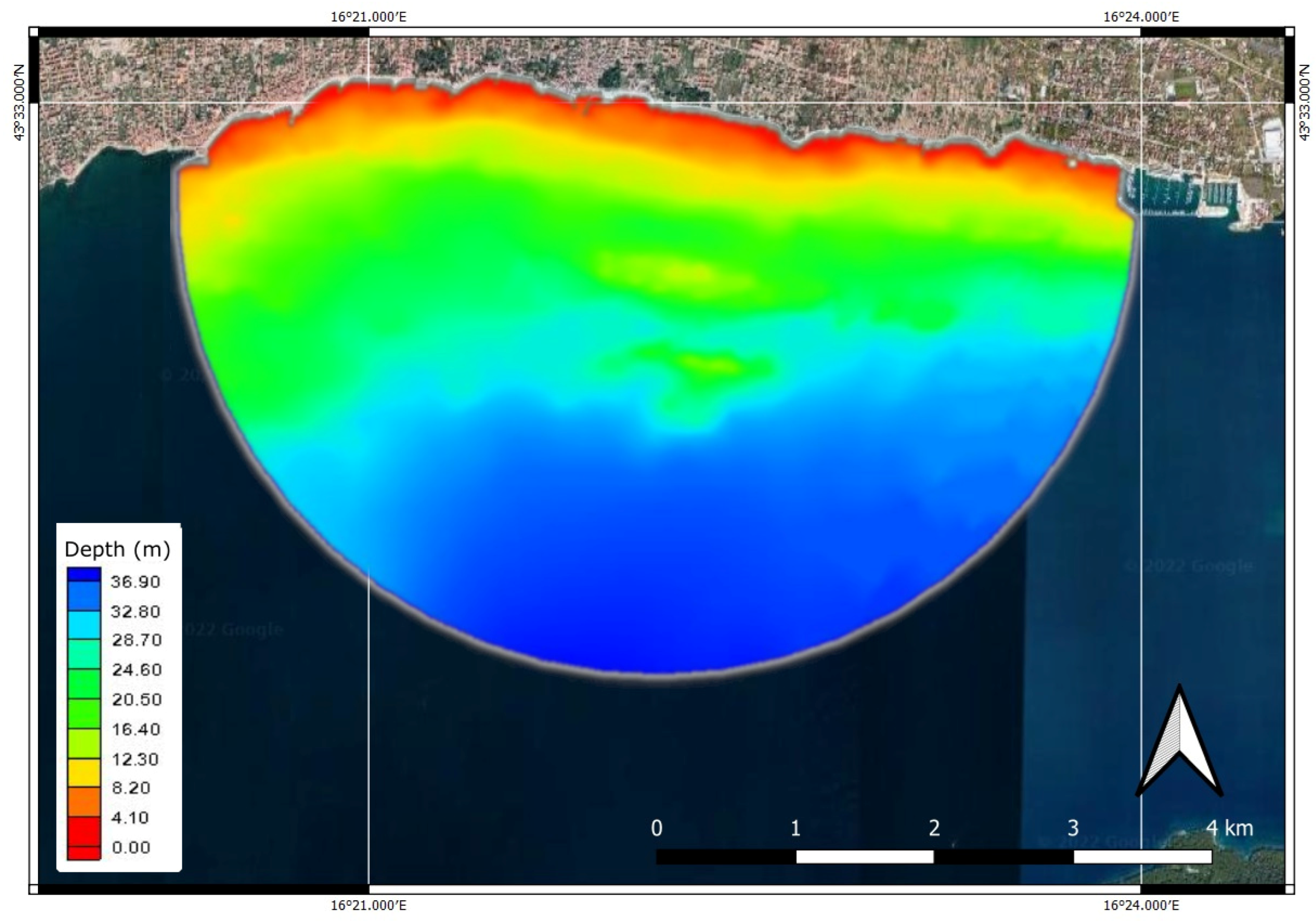
2.2. Site Description
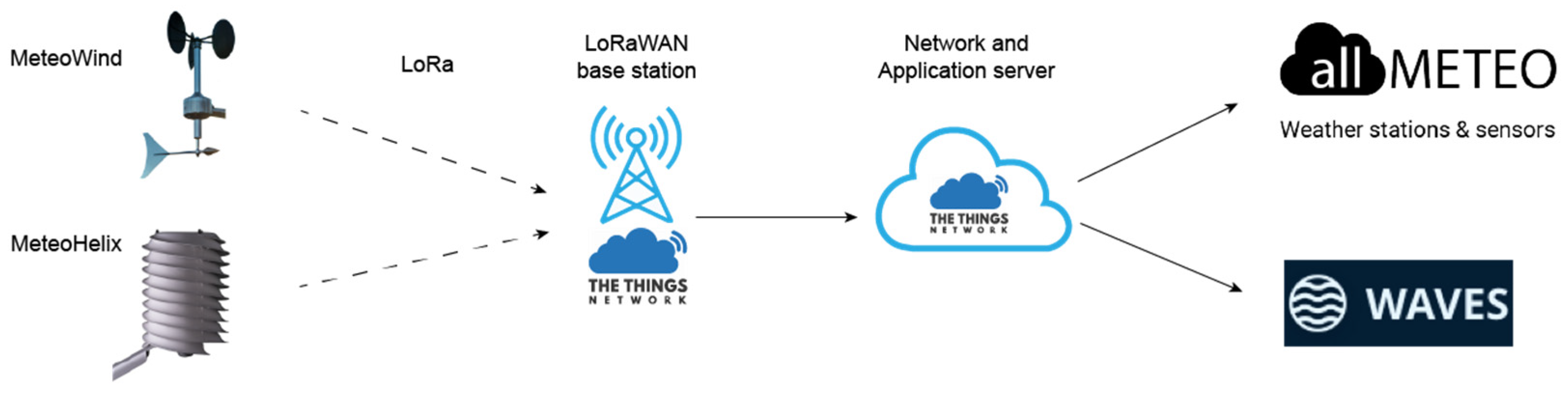
2.3. Data Collection from LoRaWAN-Based Sensor Device
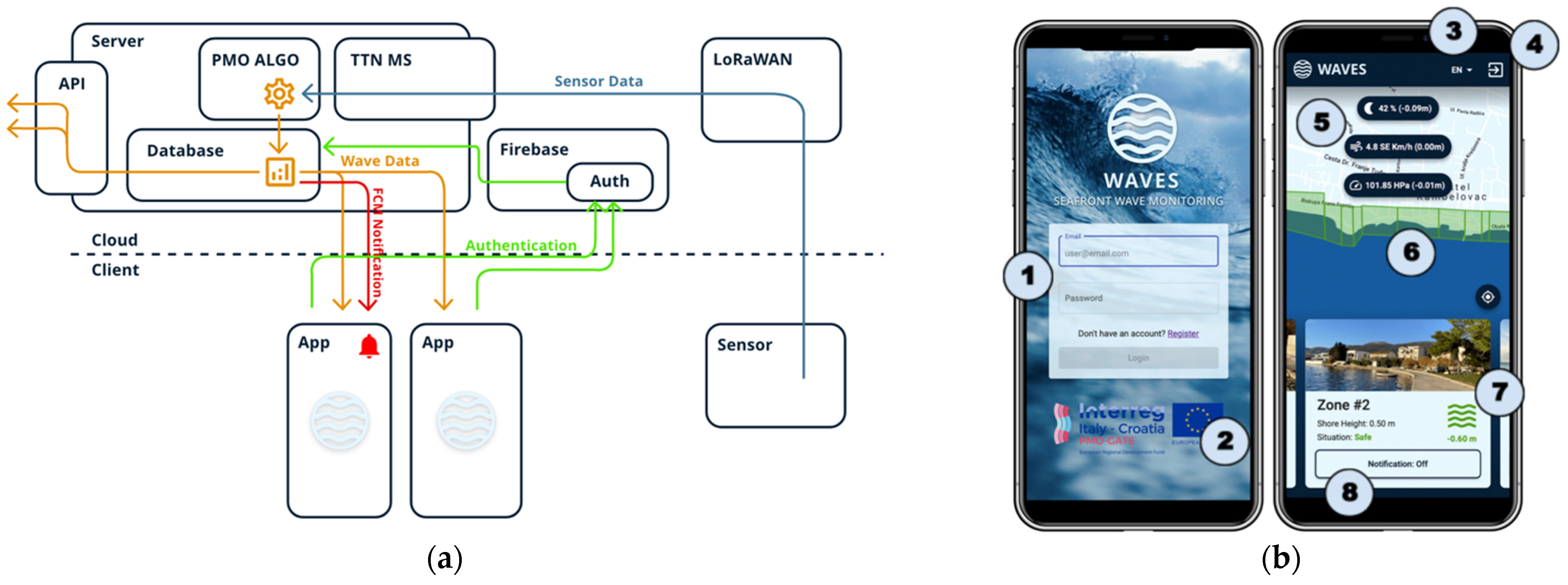
2.4. Waves Seafront Monitoring Architecture—Overview and Functionalities
- A.
- Login interface (Figure 8b)—initial interface for users when opening the application:
- B.
- Registration Interface—the registration interface is analogous to the login interface, only it allows the user to create an account to access the application by entering login information. To simplify logging into the system, there is no special validation of user accounts, such as email confirmation.
- C.
- Map interface (Figure 8b) —the central part of the application, which contains the following basic functionalities:
- At the top is a drop-down menu where the user has a choice between three languages: Croatian, English and Italian. By clicking on an option, the interface text adjusts the interface language (Figure 8b, number 3).
- Log out button from the application (Figure 8b, number 4).
- Values read from the sensor are updated over time depending on how often the data from the TTN arrives. From top to bottom, sea level is the sum of altitudes caused by sea tide, wind speed and direction and barometric pressure (Figure 8b, number 5). The total amount is calculated based on the algorithm submitted by the Client.
- Google maps with plotted polygons that correspond to discretized segments of the coast according to their heights (Figure 8b, number 6). The color of the zone corresponds to the early warning status: green—safe, i.e., the sea level is below the coast level; yellow—warning, i.e., the sea can exceed 20 cm above the height of the shore; orange—dangerous, i.e., the sea can rise up to 50 cm above the height of the shore; red—flooded, i.e., the sea exceeds 50 cm above the height of the coast. By clicking on an individual zone, the cards will position themselves next to the corresponding zone and the map will be centered on the selected zone. Based on the coastal height data, the monitoring area is divided into 10 zones.
- Zone maps showing the names and photos of coastal zones. Here, the user can see exactly the height of this segment of the coast, the estimated sea level in relation to the zone and, consequently, the situation in that zone, which is coded in colors analogous to the zones on the map (Figure 8b, number 7). Each zone information contains the sea level with respect to the coastal height, where the number with the minus sign shows how much the sea level is below the coastal height. Once the number becomes positive, the zones change color since this result corresponds with estimated flood. By moving the tabs left or right, the user can focus on a specific zone, and the map will center on that zone.
- Notification button (Figure 8b, number 8). By clicking on this button individually for each zone, the user can indicate whether he wants to receive notifications when the situation in a particular zone changes.
3. Results
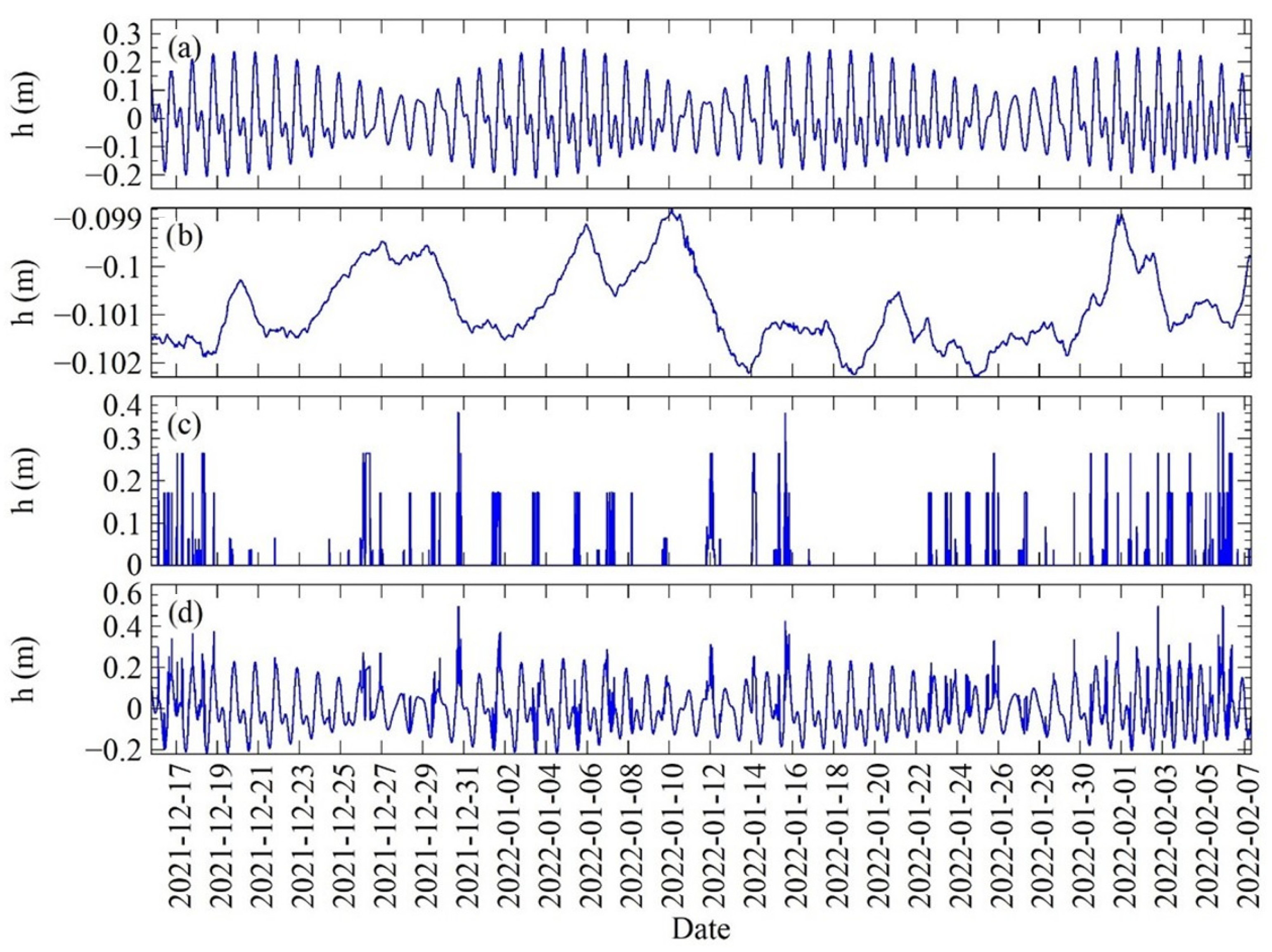
3.1. Sea Level Determination Based on the Tidal Fluctuations
3.2. Sea Level Determination Based on the Tidal Fluctuations and Barometric Pressure Changes
3.3. Wind-Generated Waves
3.4. Real-Time Prediction of Sea Water Elevation and Warning
4. Discussion
5. Conclusions
- The presented procedure to assess coastal flooding induced by seawater has been shown to be efficient when applied to the Kaštela study area.
- The origin of the assessment for the seawater elevation relies on three basic mechanisms: tidal oscillations, barometric pressure-induced oscillations and wind-generated waves. Despite the potential limitation, no significant deflection from the sea water elevation occurred at the site during the period from 15 December 2021 to 7 February 2022 was observed.
- The presented procedure shows robustness in the potential to incorporate other relevant mechanisms influencing sea water elevation and site-specific features. It can be extended to the relevant mechanisms acting toward the sea level definition and adjusted to the local conditions reflecting the site-specific features. In case of need, additional effects can be added: (i) submerged structures overtopping, (ii) wave run-up, (iii) seiche, (iv) beach or shoreline friction effects, (v) dynamic inverse barometric effects, (vi) coastal flooding induced by the precipitation, especially during the cyclone and its superposition with the sea-induced flooding. The latter not only contributes to enhanced capacity of the coastal flooding awareness at the Kaštela site, but also enables the procedure to be applied at other sites.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- IPCC. Changes in climate extremes and their impacts on the natural physical environment. In Managing the Risks of Extreme Events and Disasters to Advance Climate Change Adaptation; Field, C.B., Barros, V., Stocker, T.F., Dahe, Q., Dokken, D.J., Ebi, K.L., Mastrandrea, M., Mach, K.J., Plattner, G.K., Allen, S.K., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2012; pp. 109–230. [Google Scholar]
- Petroliagkis, T.I.; Voukouvalas, E.; Disperati, J.; Bidlot, J. Joint Probabilities of Storm Surge, Significant Wave Height and River Discharge Components of Coastal Flooding Events. In Utilising Statistical Dependence Methodologies and Techniques, JCR Technical Reports; Publications Office of the European Union: Luxembourg, 2016. [Google Scholar]
- Tsoukala, V.K.; Chondros, M.; Kapelonis, Z.G.; Martzikos, N.; Lykou, A.; Belibassakis, K.; Makropoulos, C. An integrated wave modelling framework for extreme and rare events for climate change in coastal areas—The case of Rethymno, Crete. Oceanologia 2016, 58, 71–89. [Google Scholar] [CrossRef]
- Gallien, T.; Sanders, B.; Flick, R. Urban coastal flood prediction: Integrating wave overtopping, flood defenses and drainage. Coast. Eng. 2014, 91, 18–28. [Google Scholar] [CrossRef]
- Barnard, P.L.; Van Ormondt, M.; Erikson, L.H.; Eshleman, J.; Hapke, C.; Ruggiero, P.; Adams, P.; Foxgrover, A.C. Development of the Coastal Storm Modeling System (CoSMoS) for predicting the impact of storms on high-energy, active-margin coasts. Nat. Hazards 2014, 74, 1095–1125. [Google Scholar] [CrossRef]
- Mendoza, E.T.; Jimenez, J.A. Regional vulnerability analysis of Catalan beaches to storms. In Proceedings of the Institution of Civil Engineers—Maritime Engineering; Thomas Telford Ltd.: London, UK, 2009; Volume 162, pp. 127–135. [Google Scholar]
- De Kleermaeker, S.; Verlaan, M.; Kroos, J.; Zijl, F. A new coastal flood forecasting system for the Netherlands. In Proceedings of the Hydro12 Conference Proceedings: Taking Care of the Sea, Rotterdam, The Netherlands, 13–15 November 2012; Dorst, L., van Dijk, T., van Ree, R., Boers, J., Brink, W., Kinneging, N., van Lancker, V., de Wulf, A., Nolte, H., Eds.; Hydrographic Society Benelux: Heeg, The Netherlands, 2012. [Google Scholar] [CrossRef]
- Doong, D.-J.; Chuang, L.Z.H.; Wu, L.-C.; Fan, Y.-M.; Kao, C.C.; Wang, J.-H. Development of an operational coastal flooding early warning system. Nat. Hazards Earth Syst. Sci. 2012, 12, 379–390. [Google Scholar] [CrossRef]
- Bogaard, T.; De Kleermaeker, S.; Jaeger, W.S.; Van Dongeren, A. Development of Generic Tools for Coastal Early Warning and Decision Support. In Proceedings of the E3S Web of Conferences—3rd European Conference on Flood Risk Management (FLOODrisk 2016), Lyon, France, 17–21 October 2016; EDP Sciences: Paris, France, 2016; Volume 7, p. 18017. [Google Scholar] [CrossRef]
- Dreier, N.; Fröhle, P. Operational wave forecast in the German Bight as part of a sensor and risk based early warning system. J. Coast. Res. 2018, 85, 1161–1165. [Google Scholar] [CrossRef]
- Merrifield, M.A.; Johnson, M.; Guza, R.T.; Fiedler, J.W.; Young, A.P.; Henderson, C.S.; Lange, A.M.Z.; O’Reilly, W.C.; Ludka, B.C.; Okihiro, M.; et al. An early warning system for wave-driven coastal flooding at Imperial Beach, CA. Nat. Hazards 2021, 108, 2591–2612. [Google Scholar] [CrossRef]
- Memos, C.; Makris, C.; Metallinos, A.; Karambas, T.; Zissis, D.; Chondros, M.; Spiliopoulos, G.; Emmanouilidou, M.; Papadimitriou, A.; Baltikas, V.; et al. Accu-Waves: A decision support tool for navigation safety in ports. In Proceedings of the 1st In-ternational Conference Design and Management of Port, Coastal and Offshore Works (DMPCO), Athens, Greece, 8–11 May 2019. [Google Scholar]
- Makris, C.; Androulidakis, Y.; Karambas, T.; Papadimitriou, A.; Metallinos, A.; Kontos, Y.; Baltikas, V.; Chondros, M.; Krestenitis, Y.; Tsoukala, V.; et al. Integrated modelling of sea-state forecasts for safe navigation and operational management in ports: Application in the Mediterranean Sea. Appl. Math. Model. 2020, 89, 1206–1234. [Google Scholar] [CrossRef]
- Spiliopoulos, G.; Bereta, K.; Zissis, D.; Memos, C.; Makris, C.; Metallinos, A.; Ka-rambas, T.; Chondros, M.; Emmanouilidou, M.; Papadimitriou, A.; et al. A Big Data framework for Modelling and Simulating high-resolution hydrodynamic models in sea harbours. In Proceedings of the Global Oceans 2020: Singapore–USA Gulf Coast, Biloxi, MS, USA, 5–30 October 2020; IEEE: New York, NY, USA, 2020; pp. 1–5. [Google Scholar]
- Mosavi, A.; Ozturk, P.; Chau, K.-W. Flood Prediction Using Machine Learning Models: Literature Review. Water 2018, 10, 1536. [Google Scholar] [CrossRef]
- Chondros, M.; Metallinos, A.; Papadimitriou, A.; Memos, C.; Vasiliki, T. A Coastal Flood Early-Warning System Based on Offshore Sea State Forecasts and Artificial Neural Networks. J. Mar. Sci. Eng. 2021, 9, 1272. [Google Scholar] [CrossRef]
- Atzori, L.; Iera, A.; Morabito, G. The Internet of Things: A survey. Comput. Netw. 2010, 54, 2787–2805. [Google Scholar] [CrossRef]
- Nižetić, S.; Šolić, P.; López-de-Ipiña González-de-Artaza, D.; Patrono, L. Internet of Things (IoT): Opportunities, issues and challenges towards a smart and sustainable future. J. Clean. Prod. 2020, 274, 122877. [Google Scholar] [CrossRef] [PubMed]
- Reda, H.T.; Daely, P.T.; Kharel, J.; Shin, S.Y. On the application of IoT: Meteorological information display system based on LoRa wireless communication. IETE Tech. Rev. 2018, 35, 256–265. [Google Scholar] [CrossRef]
- LÓpez-Vargas, A.; Fuentes, M.; Vivar, M. On the application of IoT for real-time monitoring of small stand-alone PV systems: Results from a new smart datalogger. In Proceedings of the 2018 IEEE 7th World Conference on Photovoltaic Energy Conversion (WCPEC) (A Joint Conference of 45th IEEE PVSC, 28th PVSEC & 34th EU PVSEC), Waikoloa, HI, USA, 10–15 June 2018; pp. 605–607. [Google Scholar] [CrossRef]
- Idier, D.; Aurouet, A.; Bachoc, F.; Baills, A.; Betancourt, J.; Gamboa, F.; Klein, T.; López-Lopera, A.F.; Pedreros, R.; Rohmer, J.; et al. A User-Oriented Local Coastal Flooding Early Warning System Using Metamodelling Techniques. J. Mar. Sci. Eng. 2021, 9, 1191. [Google Scholar] [CrossRef]
- Janeković, I.; Kuzmić, M. Numerical simulation of the Adriatic Sea principal tidal constituents. Ann. Geophys. 2005, 23, 3207–3218. [Google Scholar] [CrossRef]
- Press, W.; Teukolsky, S.; Vetterline, W.T.; Flannery, B.P. Numerical Recipes: The Art of Scientific Computing; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Cooley, J.W.; Tukey, J.W. An algorithm for the machine calculation of complex Fourier series. Math. Comput. 1965, 19, 297–301. [Google Scholar] [CrossRef]
- Ponte, R.M. Variability in a homogeneous global ocean forced by barometric pressure. Dyn. Atmos. Ocean. 1993, 18, 209–234. [Google Scholar] [CrossRef]
- The Effect of Fetch Width on Wave Generation, US Corps of Engineers, Technical Memorandum No. 70. 1954. Available online: https://usace.contentdm.oclc.org/digital/api/collection/p266001coll1/id/7549/download (accessed on 27 July 2021).
- Goda, J. Revisiting Wilson’s Formulas for Simplified Wind-Wave Prediction. J. Waterw. Port Coast.Ocean Eng. 2003, 129, 2003. [Google Scholar] [CrossRef]
- World Meteorological Organization, Guide to Wave Analysis and Forecasting, Geneve, Switzerland. 2018. Available online: https://library.wmo.int/doc_num.php?explnum_id=10979 (accessed on 31 July 2021).
- SMS 13.2 Tutorial CGWAVE Analysis, Aquaveo, v13.2. USA. 2012. Available online: https://www.aquaveo.com/software/sms-learning-tutorials (accessed on 17 August 2021).
- Demirbilek, Z.; Panchang, V. CGWAVE: A Coastal Surface Water Wave Model of the Mild Slope Equation; Technical Report CHL-98-26; US Army Corps of Engineering: Washington, DC, USA, 1998. [Google Scholar]
- Panchang, G.V.; Wei, G.; Pearce, R.B.; Briggs, J.M. Numerical Simulation of Irregular Wave Propagation over Shoal. J. Waterw. Port Coast. Ocean. Eng. 1990, 116, 324–340. [Google Scholar] [CrossRef]
- Zhao, L.; Panchang, V.; Chen, W.; Demirbilek, Z.; Chhabbra, N. Simulation of wave breaking effects in two-dimensional elliptic harbor wave models. Coast. Eng. 2001, 42, 359–373. [Google Scholar] [CrossRef]
- Brockmann, E.; Harsson, B.-G.; Ihde, J. Geodetic Reference System of the Republic of Croatia—Consultants Final Report on Horizontal and Vertical Datum Definition, Map Projection and Basic Networks for the state geodetic administration of the Republic of Croatia. 2001; 1–35. [Google Scholar]
- Croatian Meteorological and Hydrological Service. Report of Measured Wind Properties on Gauging Station Marjan. 2011. (In Croatian)
- BARANI DESIGN Technologies, “MeteoHelix® IoT Pro”. Available online: https://static1.squarespace.com/static/597dc443914e6bed5fd30dcc/t/5f5f9ce8e52f900a7f1982af/1600101615389/MeteoHelix+IoT+Pro+DataSheet.pdf (accessed on 30 March 2022).
- BARANI DESIGN Technologies, “MeteoWind® IoT Pro”. Available online: https://static1.squarespace.com/static/597dc443914e6bed5fd30dcc/t/5f1813e0fd8f9a4a19feb781/1595413481804/MeteoWind+IoT+Pro+DataSheet.pdf (accessed on 30 March 2022).
- Xia, J.; Falconer, R.A.; Xiao, X.; Wang, Y. New criterion for stability of a human body in floodwaters. J. Hydraul. Res. 2014, 52, 93–104. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Constituent | Amplitude (m) | Period (h) | Phase (°) |
|---|---|---|---|
| O1 | 0.02821644 | 25.81743 | −160.6065 |
| K1 | 0.02339150 | 24.06963 | 105.3624 |
| P1 | 0.08773618 | 23.93077 | 153.1416 |
| N2 | 0.01279412 | 12.65921 | 65.3833 |
| M2 | 0.07688095 | 12.41916 | −31.55806 |
| S2 | 0.05696792 | 12.00000 | −126.8397 |
| K2 | 0.01636003 | 11.96538 | 116.0807 |
| Data Sets (h) | 0–1000 | 1000–2000 | 2000–3000 | 3000–4000 | 4000–5000 | 5000–6000 | 6000–7000 | 7000–8000 | 8000–9000 | 10,000–11,000 | 11,000–12,444 | 0–12,444 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | 0.198 | 0.141 | 0.083 | 0.082 | 0.075 | 0.071 | 0.147 | 0.241 | 0.091 | 0.159 | 0.095 | 0.136 |
| Pear. Corr. Coef. | 0.551 | 0.597 | 0.749 | 0.782 | 0.923 | 0.802 | 0.664 | 0.639 | 0.752 | 0.834 | 0.791 | 0.578 |
| Data Sets (h) | 0–1000 | 1000–2000 | 2000–3000 | 3000–4000 | 4000–5000 | 5000–6000 | 6000–7000 | 7000–8000 | 8000–9000 | 10,000–11,000 | 11,000–12,444 | 0–12,444 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | 0.144 | 0.103 | 0.061 | 0.062 | 0.083 | 0.061 | 0.113 | 0.189 | 0.091 | 0.126 | 0.076 | 0.106 |
| Pear. Corr. Coef. | 0.735 | 0.776 | 0.886 | 0.886 | 0.936 | 0.865 | 0.886 | 0.794 | 0.812 | 0.891 | 0.872 | 0.777 |
| V (ms−1) | t (h) | Fmin (km) | tmin (h) | FEFF (km) | FMJ (km) | HS (m) | TS (s) | L0 (m) |
|---|---|---|---|---|---|---|---|---|
| 1.5 | 13 | 43.36 | 8.65 | 24.8 | 24.8 | 0 | ||
| 3.3 | 13 | 71.25 | 6.02 | 24.8 | 24.8 | 0 | ||
| 5.4 | 13 | 97.17 | 4.8 | 24.8 | 24.8 | 0.5 | 2.6 | 10.55 |
| 7.9 | 13 | 123.48 | 4.03 | 24.8 | 24.8 | 0.85 | 3.15 | 15.49 |
| 10.7 | 17 | 215.89 | 3.5 | 24.8 | 24.8 | 1.21 | 3.65 | 20.8 |
| 13.8 | 15 | 213.49 | 3.12 | 24.8 | 24.8 | 1.7 | 4 | 24.98 |
| 17.1 | 11 | 159.77 | 2.82 | 24.8 | 24.8 | 2.19 | 4.35 | 29.54 |
| 20.7 | 4 | 45.07 | 2.59 | 24.8 | 24.8 | 2.78 | 4.76 | 35.38 |
| V (ms−1) | t (h) | Fmin (km) | tmin (h) | FEFF (km) | FMJ (km) | HS (m) | TS (s) | L0 (m) |
|---|---|---|---|---|---|---|---|---|
| 1.5 | 5 | 11.71 | 6.68 | 17.4 | 11.71 | 0 | ||
| 3.3 | 5 | 19.24 | 4.65 | 17.4 | 17.4 | 0 | ||
| 5.4 | 5 | 26.24 | 3.7 | 17.4 | 17.4 | 0.5 | 2.5 | 9.76 |
| 7.9 | 5 | 33.35 | 3.11 | 17.4 | 17.4 | 0.77 | 2.95 | 13.59 |
| 10.7 | 5 | 40.37 | 2.7 | 17.4 | 17.4 | 1.05 | 3.15 | 15.49 |
| 13.8 | 5 | 34.91 | 2.41 | 17.4 | 17.4 | 1.41 | 3.6 | 20.23 |
| 17.1 | 5 | 26.94 | 2.18 | 17.4 | 17.4 | 1.92 | 3.98 | 24.73 |
| 20.7 | 5 | 6.75 | 2 | 17.4 | 6.95 | 2.35 | 4.15 | 26.89 |
| Incident Direction | Hs (m) | T (s) | γ | nn |
|---|---|---|---|---|
| SE (165°) | 3.05 | 6.40 | 3.30 | 4.00 |
| SSW (202.5°) | 2.60 | 5.90 | 3.30 | 4.00 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nikolić, Ž.; Srzić, V.; Lovrinović, I.; Perković, T.; Šolić, P.; Kekez, T. Coastal Flooding Assessment Induced by Barometric Pressure, Wind-Generated Waves and Tidal-Induced Oscillations: Kaštela Bay Real-Time Early Warning System Mobile Application. Appl. Sci. 2022, 12, 12776. https://doi.org/10.3390/app122412776
Nikolić Ž, Srzić V, Lovrinović I, Perković T, Šolić P, Kekez T. Coastal Flooding Assessment Induced by Barometric Pressure, Wind-Generated Waves and Tidal-Induced Oscillations: Kaštela Bay Real-Time Early Warning System Mobile Application. Applied Sciences. 2022; 12(24):12776. https://doi.org/10.3390/app122412776
Chicago/Turabian StyleNikolić, Željana, Veljko Srzić, Ivan Lovrinović, Toni Perković, Petar Šolić, and Toni Kekez. 2022. "Coastal Flooding Assessment Induced by Barometric Pressure, Wind-Generated Waves and Tidal-Induced Oscillations: Kaštela Bay Real-Time Early Warning System Mobile Application" Applied Sciences 12, no. 24: 12776. https://doi.org/10.3390/app122412776
APA StyleNikolić, Ž., Srzić, V., Lovrinović, I., Perković, T., Šolić, P., & Kekez, T. (2022). Coastal Flooding Assessment Induced by Barometric Pressure, Wind-Generated Waves and Tidal-Induced Oscillations: Kaštela Bay Real-Time Early Warning System Mobile Application. Applied Sciences, 12(24), 12776. https://doi.org/10.3390/app122412776