1. Introduction
Currently, research on the magnetic properties of bulk magnetic materials, micro and nanostructures, is an important tool for students in the fields of physics and engineering [
1,
2,
3,
4,
5]. The hysteresis curves of a magnetic material can contribute to determining its basic fields of applications. In addition, different magnetic properties, such as remanence magnetization, coercivity, saturation magnetization, hysteresis, Curie temperature, magnetic anisotropy, and susceptibility, can be determined from magnetic hysteresis curves, obtained at room temperature (about 297 K) [
3,
6]. Magnetic materials can also be classified according to their magnetic curves, and, in the case of nanoparticles, the average diameter can also be estimated [
7]. The use of devices called magnetometers is the most common technique used to obtain hysteresis curves of magnetic materials. It is responsible for detecting the induced magnetic fields of the material in the presence or absence of an applied magnetic field [
1,
2,
8,
9]. Several magnetometers have been developed over the years for different applications and different types of reading systems of sample-induced field, such as the vibrating sample (VSM), perhaps the oldest one [
2], the system based on the superconducting quantum interference device (SQUID) [
10], magneto-optical Kerr effect (MOKE) [
11], and the Hall effect [
1,
8,
9], with different sensitivities and costs. However, most parts of these devices (magnetometers) are high-cost systems, making them unfeasible for low-budget laboratories, academic studies, or teaching laboratories in many universities.
This study presents a very different approach to measuring magnetic samples using low-cost equipment (magnetometer) developed with items normally accessible to most research and teaching laboratories, such as two magnets (K&J Magnetics, model BX8C8), a 5-volt battery or a power system directly from mains, one MLX-90215 sensor (Melexis Inc.), one AD-AD22151 sensor (Analog Devices, Inc.), and bench multimeters (HP 34401A or Iminipa ET-2042D). The first version of this device (magnetometer) was developed and published by Araujo and his collaborators [
12]. This magnetometer has the advantage of being quickly assembled and transported, in addition to the possibility of becoming operational and thus accessible to most research laboratories, being ideal for low-budget basic physics teaching laboratories. The core of this equipment is composed of two magnets, a small circuit board, and an acrylic plate, which serves as a support for the sensors and the sample holder. We use a simple theoretical magnetic dipole model to estimate the magnetic moment. Most commercial magnetometers are not accessible to a teaching laboratory other than the proposed equipment. Thinking about it, we use a simple model to characterize the results obtained in the measurements. The magnetometer was tested using commercially purchased bulk and microparticle samples.
2. Magnetometer Design
We developed equipment using only available and inexpensive components. This was an important issue in the design of this system.
Figure 1a shows a schematic drawing of the designed magnetometer: (1) We used an acrylic plate of 65 × 55 mm with 10.5 mm of thickness, two Hall effect sensors were attached to them, (2) two neodymium magnets of the same configuration containing 12.78 mm thick and 19 mm in diameter, (3) all these were on an iron base containing two screws of the same configuration, with approximately 30 mm in diameter and 109 in length, (4) a printed circuit board used to operate the sensor plate details can be seen in
Figure 1b, (5) an alignment system consisting of a screw and a spring system, necessary to align the probe Hall to improve the detection of the sample induced field, (6) an aluminum base, (7) a battery set or a power supply system that can supply the sensors with 5 V DC—the output readings are taken by a multimeter. The probe is precisely centered between two neodymium magnets (K&J Magnetics), 19 mm diameter and 12.9 mm length. A magnetic field of up to 0.4 T can be detected.
In addition, the homogeneity of the magnetic field applied by the magnets was verified. In this study, we used a 9640 commercial magnetometer (F. W. Bell Inc., Orlando - US). The probe was built using two Hall effect sensors: One MLX-90215 sensor (Melexis Inc.) with an active sensitivity area of 0.20 × 0.20 mm, which has a gain from programming 4.1 to 140 mV/mT, and a voltage that can be adjusted from 0.03 to 4.97 V (this sensor needs to be programmed and calibrated before use), and one AD-AD22151 sensor (Analog Devices, Inc.), which has an active diameter of 300 µm, with sensitivity ranging from 10 to 110 mV/mT. Differently from the first one, this sensor was designed to vary its sensitivity during operation [
12,
13].
First, we analyzed the behavior of the sensors in the laboratory environment, using a thermocouple connected to one of the magnets. At the position of the Melexis sensor, no temperature change was detected during the measurement period, even when the magnet got closer to the sensor. For better performance, we used a circuit board developed by Araujo and his collaborators (See
Figure 1b) [
13].
Figure 1b shows the circuit board specifications: R1 is an 18 kΩ resistor, R2 is a 1 kΩ resistor, R3 is a variable resistor from 0 to 10 kΩ (trimmer), C1 and C2 are capacitors, C1 is a 1 µF power filter and C2 has 0.1 µF, 1 to 8 refers to the connection pins of the AD22151 sensor (sensor input and output connections). Furthermore, in the space between the magnets, where there is an acrylic plate, the magnetic field applied nearby the probe has high homogeneity and is suitable for the sample holder sizes. The noise of both sensors was analyzed, and we measured noise of approximately 40 µV, using equipment to analyze the spectrum (SR760 Stanford Research Systems Inc., Culver City, CA, USA).
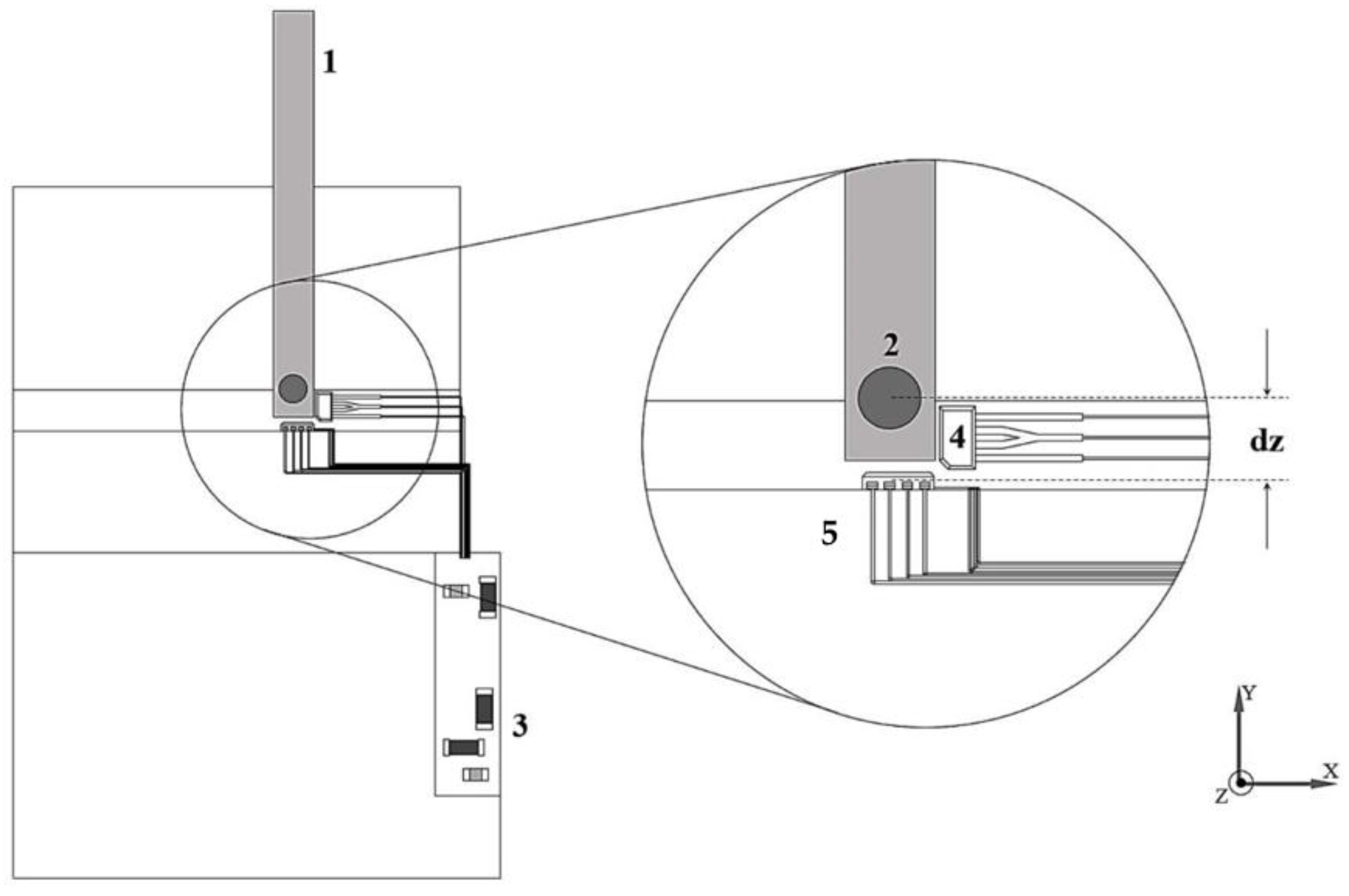
In
Figure 2, we can see the probe Hall built on an acrylic structure, with two bands of 56 × 56 mm and 6.4 mm thickness. One of the bands is used to assemble the sensors, and the other for the sample holder. The probe components are: (1) Acrylic sample holder, (2) containing a cylindrical cavity of 3.0 mm diameter and 3.0 mm deep, located near one of the ends–in addition to analyzing fine particles, the sample holder can analyze bulk materials, particles and liquid samples (such as magnetic nanoparticles in oil), (3) S1 sensor circuit board (See
Figure 2, No. (5)), AD-AD22151 Hall effect sensor (Analog Devices, Inc.), with variable sensitivity, responsible for detecting the sample induced magnetic field on the
y-axis, we can select the sensitivity using a switch attached to the multimeter, (4) S2 MLX-90215 Hall effect sensor (Melexis Inc.), calibrated with a fixed sensitivity of 2.8 mV/mT and an offset of 0.4 V. This sensor is responsible for detecting the magnetic field of magnets in the
z-axis. In this assembly, we used two bench multimeters to detect the two sensors: HP 34401A and Iminipa ET-2042D. To power the Hall effect sensors with 5 V, we can use a battery or a power system connected to the mains.
The developed magnetometer can be seen in
Figure 3a and all components used can be seen in
Figure 3b, as follow: (1) Magnet support base (cylindrical shape) of 30 mm diameter and approximately 109 mm long, (2) aluminum base of 45 × 45 mm and 22 cm length, used as a linear rail, (3) two iron threaded nuts to keep the magnets fixed, bring them closer or move them away from the sample, varying thus the applied magnetic field, (4) fixed iron structure to fix the probe Hall, nuts and alignment screw, (5) device built to activate sensors S1 and S2, this device was connected to a multimeter, (6) probe Hall, (7) cylindrical neodymium magnet of 19 mm diameter and 12.9 mm length, (8) and (9) sample holder, acrylic plates of 5.2 × 3.1 × 32 mm, which is a sample holder that can analyze samples within a cylindrical cavity of 3.0 mm diameter and 3.0 mm length, (10) screw used to align the probe Hall with the magnetic field that can be applied by the magnets, (11) multimeter used for reading Hall sensors.
The AD-AD22151 Hall effect sensor was calibrated to maximum sensitivity (110 mV/mT)
Figure 3a. The calibration curve is shown in
Figure 4a. In this curve, we can observe that the Hall sensor has a linear relationship with the induced field voltage and the applied magnetic field. We can also observe that there was no hysteresis in the sensor, which is a result typical of the Hall effect sensor. In addition, we analyzed the signal/noise ratio of the AD22151 sensor at the minimum and maximum sensitivities. The curves are shown in
Figure 4b. In this figure, we can see that when AD22151 has a noise of approximately 40 µV. These results identify the noise of the magnetometer reading system, the peak of the graph is related to an AC magnetic field applied at 4.0 Hz.
Figure 4c represents a theoretical and experimental graph of the behavior of the magnetic field of the magnet in relation to spatial distance in the
z axis starting from the center of one of the magnet’s surfaces, the theoretical curve was obtained using the cylindrical model used by Camacho and Sosa [
14]. In
Figure 4c, we can verify that the experimental results are in agreement with the theoretical curve based on Equation (1) taken from the paper published by Camacho and Sosa [
14]. Already in
Table 1, we can verify the relationship between the magnetic field applied by the magnet and the distance in the
z axis in mm.
3. Calibration and Results
To estimate the magnetization of the material, we need a mathematical model. The simplest is the single magnetic dipole located at the center of the sample. In this case, we should assume that the sample is homogeneous and neglect the fact that we are measuring too close to it. However, this is a first-order estimate [
12,
13]. The magnetic field induced by a dipole depends on the magnetic moment
and the position in which it is measured
[
15]. When locating the origin of the coordinate system in the magnetic dipole, the field generated by it is given by
where μ
0 is the free space permeability. Our configuration applies the magnetic field in the
z direction, the detects the
x-axis and
y-axis components of the response (
x1,
y1,
z1) and
mz represents the magnetic moment only from the
z direction, so we are measuring,
Magnetization is the magnetic dipole moment normalized by the mass or volume of the sample. In our case, Mz = defined where a is the sample radius.
Therefore, with the help of a handheld microscope (Peak, Inc.) and using the sensor data sheet, we could estimate the relative distances between the center of the sample holder and the active area that lies within the sensor like y
1 = 0.63 ± 0.06 mm and z
1 = 2.30 ± 0.06 mm. We assume that the center of the sphere (3.00 mm diameter) is located in the center of the sample holder, which is the origin of the coordinate system used. Unfortunately, due to the system geometry, we were unable to use the microscope to estimate the position on the
x-axis,
x1. Thus, finally, using
mz = 55.25 Am
2/kg as the mass magnetization of Ni at 0.4 T [
1,
8,
12,
13], we found
x1 = 1.94 mm.
Figure 5 shows the measurements of the sphere in the magnetometer we developed. From this curve, we can estimate some magnetization values for the nickel sphere, close to zero field, as can be seen in
Figure 5. These values were compared with the measurements obtained by a commercial magnetometer (MPMS SQUID, Quantum Design Inc., San Diego, CA, USA) in the same sphere. Comparing the two devices (SQUID and PUC-Rio), the average relative error from the farthest point, in relation to the same magnetic field applied, was approximately 38%, whereas in the saturation region, the largest error was only 17% (See
Table 2).
After calibrating the magnetometer, we measured the 99% pure magnetite microparticles, which had been previously purchased. This sample was previously measured using a scanning magnetic microscope, which has a magnetic moment sensitivity of 1.3 × 10
−11 Am
2 [
16]. To obtain a magnetization curve using this equipment, scanning magnetic maps for each applied magnetic field are necessary.
Figure 6 represents magnetic maps of induced magnetic field, we can obtain the magnetic moment, using the point technique developed by Gutierrez and his collaborators [
17].
This method consists of obtaining two points in each scanning magnetic map: One with the minimum intensity of the sample-induced magnetic field and another with the maximum intensity. Using a moment that considers the cylindrical cavity of the sample holder, we can obtain the magnetic moment. Afterward, by dividing by the sample mass, we can obtain the magnetization curve (See
Figure 6). The scanning magnetic microscope is expensive and has a high cost to be built in most research laboratories because it requires some commercial equipment [
16]. In
Figure 7a, we can observe the comparison curve between the measurement obtained by our homemade instrument and that obtained in a scanning magnetic microscope. Comparing the two devices (Scanning Magnetic Microscope and PUC-Rio), the average relative error of the most distant point, in relation to the same magnetic field applied, was approximately 39%, whereas in the saturation region, the largest error was only 29%. We believe that these values could be improved if an Arduino board or an acquisition board had been used, such as a National Instruments Board, model NI USB-6008 (See
Figure 7b). Thus, more points could be acquired.
The existence of high-resolution magnetometers, which are often expensive equipment, prevents the application of this study in basic physics laboratories. The constituted magnetometer, as well as the theoretical model of a simple dipole, can be a fundamental step for the application of this type of equipment in the teaching of Physics, mainly in the teaching laboratory, since most of the components that make up this equipment are accessible. Feeding in this way, the study of magnetism of materials such as magnetic nanoparticles, microparticles, and even bulk material.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}