
Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Theoretical Background
3. Numerical Analysis
3.1. Single-Span Bridge
3.2. Multi-Span Bridges
4. Conclusions
- The bearing stiffness has a significant influence on the dynamic response on railway bridges at all train speeds considered in the study. Not only the amplitudes of the accelerations varied with the changes in the train speed but also the locations of the maximum accelerations shifted considerably.
- The vertical stiffness of the bearings can be assumed to be infinite when its value exceeds kN/m as neither the bridge frequency nor the acceleration response of the bridge is affected once the vertical bearing stiffness exceeds this value.
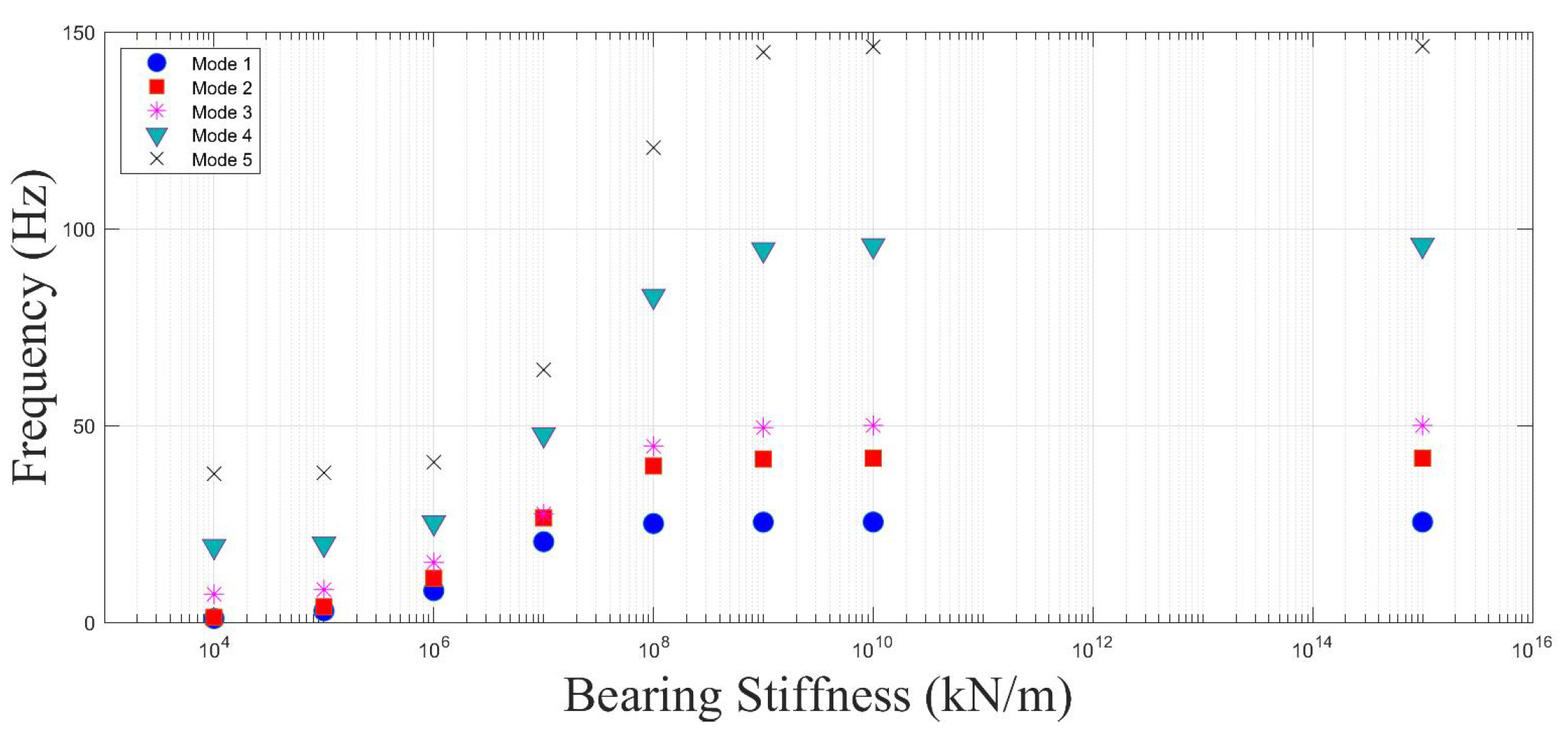
- Even when the first and second mode frequencies of the bridge is not affected by the variations in the bearing stiffness, the subtle change in the higher mode frequencies can lead to significant changes in the acceleration response. For the single-span bridge analysed, only the third mode frequency of the bridge was slightly changed when the bearing stiffness was reduced from kN/m to kN/m while the frequencies of the first two modes remained the same. However, this subtle change combined with the change in the third vertical mode shape led to a significant increase in the acceleration response as well as in a shift in the location of the maximum acceleration.
- For the multi-span bridges, the bearings at the ends of the bridge and the middle supports have a significantly different impact. When all bearings are infinitely rigid, the accelerations at each of the bearings are naturally zero. As the bearing stiffness is decreased, the accelerations at the end bearing increase rapidly, and the maximum accelerations are recorded at these edges. On the other hand, the accelerations over the middle bearings remain the lowest values over the entire bridge for all the bearing stiffness values considered.
- The acceleration response of the bridges was not significantly influenced by the train speed for the speeds considered in this study when the bearing stiffness is lower than kN/m. The effect of train speed in acceleration response is more pronounced for higher bearing stiffness values.
- For certain bearing stiffness values, the finite element analysis can suffer from instabilities at the boundaries, and the results for these cases should be evaluated carefully. However, once the bearing stiffness values drop below kN/m, these instabilities disappear. Modeling the front and back approaches can solve these instabilities and will be included in further research.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vaiana, N.; Sessa, S.; Paradiso, M.; Marmo, F.; Rosati, L. An efficient computational strategy for nonlinear time history analysis of seismically base-isolated structures. In Proceedings of the XXIV AIMETA Conference 2019, Rome, Italy, 15–19 September 2019; pp. 1340–1353. [Google Scholar] [CrossRef]
- Pellecchia, D.; Feudo, S.L.; Vaiana, N.; Dion, J.L.; Rosati, L. A procedure to model and design elastomeric-based isolation systems for the seismic protection of rocking art objects. Comput.-Aided Civ. Infrastruct. Eng. 2022, 37, 1298–1315. [Google Scholar] [CrossRef]
- Natale, A.; Vecchio, C.D.; Ludovico, M.D.; Caner, A.; Naghshineh, A.K.; Jacak, M. Creep effects on elastomeric and ball rubber bearings under sustained lateral loads. Struct. Infrastruct. Eng. 2022, 1–11. [Google Scholar] [CrossRef]
- Gonen, S.; Demirlioglu, K.; Erduran, E. Modal Identification of a Railway Bridge Under Train Crossings: A Comparative Study. In Dynamics of Civil Structures; Springer: Cham, Switzerland, 2022; pp. 33–40. [Google Scholar] [CrossRef]
- Ichikawa, M.; Miyakawa, Y.; Matsuda, A. Vibration analysis of the continuous beam subjected to a moving mass. J. Sound Vib. 2000, 230, 493–506. [Google Scholar] [CrossRef]
- Frýba, L. Vibration of Solids and Structures under Moving Loads; Springer: Berlin/Heidelberg, Germany, 1999. [Google Scholar] [CrossRef]
- Michaltsos, G.; Sophianopoulos, D.; Kounadis, A.N. The effect of a moving mass and other parameters on the dynamic response of a simply supported beam. J. Sound Vib. 1996, 191, 357–362. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yau, J.; Yao, Z.; Wu, Y. Vehicle-Bridge Interaction Dynamics: With Applications to High-Speed Railways; World Scientific: Singapore, 2004. [Google Scholar]
- Garinei, A.; Risitano, G. Vibrations of railway bridges for high speed trains under moving loads varying in time. Eng. Struct. 2008, 30, 724–732. [Google Scholar] [CrossRef]
- Yang, Y.B.; Lin, C.W. Vehicle-bridge interaction dynamics and potential applications. J. Sound Vib. 2005, 284, 205–226. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, N.; Guo, W. Analysis of resonance mechanism and conditions of train–bridge system. J. Sound Vib. 2006, 297, 810–822. [Google Scholar] [CrossRef]
- Lu, Y.; Mao, L.; Woodward, P. Frequency characteristics of railway bridge response to moving trains with consideration of train mass. Eng. Struct. 2012, 42, 9–22. [Google Scholar] [CrossRef]
- Jin, Z.; Li, G.; Pei, S.; Liu, H. Vehicle-induced random vibration of railway bridges: A spectral approach. Int. J. Rail Transp. 2017, 5, 191–212. [Google Scholar] [CrossRef]
- Cheng, Y.S.; Au, F.T.; Cheung, Y.K. Vibration of railway bridges under a moving train by using bridge-track-vehicle element. Eng. Struct. 2001, 23, 1597–1606. [Google Scholar] [CrossRef]
- Kwark, J.W.; Choi, E.S.; Kim, Y.J.; Kim, B.S.; Kim, S.I. Dynamic behavior of two-span continuous concrete bridges under moving high-speed train. Comput. Struct. 2004, 82, 463–474. [Google Scholar] [CrossRef]
- Majka, M.; Hartnett, M. Effects of speed, load and damping on the dynamic response of railway bridges and vehicles. Comput. Struct. 2008, 86, 556–572. [Google Scholar] [CrossRef]
- Xia, H.; Zhang, N. Dynamic analysis of railway bridge under high-speed trains. Comput. Struct. 2005, 83, 1891–1901. [Google Scholar] [CrossRef]
- Ju, S.H.; Lin, H.T. Resonance characteristics of high-speed trains passing simply supported bridges. J. Sound Vib. 2003, 267, 1127–1141. [Google Scholar] [CrossRef]
- Ju, S.H.; Lin, H.T.; Huang, J.Y. Dominant frequencies of train-induced vibrations. J. Sound Vib. 2009, 319, 247–259. [Google Scholar] [CrossRef]
- Arvidsson, T.; Karoumi, R. Train–bridge interaction – a review and discussion of key model parameters. Int. J. Rail Transp. 2014, 2, 147–186. [Google Scholar] [CrossRef]
- Doménech, A.; Museros, P.; Martínez-Rodrigo, M.D. Influence of the vehicle model on the prediction of the maximum bending response of simply-supported bridges under high-speed railway traffic. Eng. Struct. 2014, 72, 123–139. [Google Scholar] [CrossRef]
- González, A.; Covián, E.; Casero, M. Verifying the suitability of uncoupled numerical methods for solving vehicle–bridge interaction problems. Struct. Infrastruct. Eng. 2022, 1–18. [Google Scholar] [CrossRef]
- Liu, K.; De Roeck, G.; Lombaert, G. The effect of dynamic train-bridge interaction on the bridge response during a train passage. J. Sound Vib. 2009, 325, 240–251. [Google Scholar] [CrossRef]
- Choi, J.Y.; Kim, S.H. Impact Evaluation of Track Girder Bearing on Yeongjong Grand Bridge. Appl. Sci. 2020, 10, 68. [Google Scholar] [CrossRef]
- Yang, Y.; Lin, C.; Yau, J.; Chang, D. Mechanism of resonance and cancellation for train-induced vibrations on bridges with elastic bearings. J. Sound Vib. 2004, 269, 345–360. [Google Scholar] [CrossRef]
- Yau, J.; Wu, Y.; Yang, Y. Impact Response of Bridges with Elastic Bearings to Moving Loads. J. Sound Vib. 2001, 248, 9–30. [Google Scholar] [CrossRef]
- Zhang, Z.; Li, X.Z.; Zhang, X.; Liu, Q. Study on the vibration-isolation effects of elastic bearings on train-induced vibration of railway bridge. Eng. Mech. 2015, 32, 103. [Google Scholar] [CrossRef]
- Zhu, X.; Law, S. Moving load identification on multi-span continuous bridges with elastic bearings. Mech. Syst. Signal Process. 2006, 20, 1759–1782. [Google Scholar] [CrossRef]
- Kim, C.W.; Kawatani, M.; Hwang, W.S. Reduction of traffic-induced vibration of two-girder steel bridge seated on elastomeric bearings. Eng. Struct. 2004, 26, 2185–2195. [Google Scholar] [CrossRef]
- Xu, H.; Li, W.L. Dynamic behavior of multi-span bridges under moving loads with focusing on the effect of the coupling conditions between spans. J. Sound Vib. 2008, 312, 736–753. [Google Scholar] [CrossRef]
- Zangeneh, A.; Battini, J.M.; Pacoste, C.; Karoumi, R. Fundamental modal properties of simply supported railway bridges considering soil-structure interaction effects. Soil Dyn. Earthq. Eng. 2019, 121, 212–218. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, L.; Yu, Z.; Gong, W.; Bai, Y. Non-Stationary Random Vibration Analysis of Railway Bridges under Moving Heavy-Haul Trains. Int. J. Struct. Stab. Dyn. 2018, 18, 1–21. [Google Scholar] [CrossRef]
- Erduran, E.; Nordli, C.; Salehi, M.; Gonen, S. Effect of Aging of Bearings on the Behavior of Single-Span Railway Bridges. In European Workshop on Structural Health Monitoring; Springer: Berlin/Heidelberg, Germany, 2022; pp. 680–688. [Google Scholar] [CrossRef]
- MATLAB. Version 9.10.0 (R2021a); The MathWorks Inc.: Natick, MA, USA, 2021. [Google Scholar]
- Erduran, E.; Gonen, S.; Alkanany, A. Parametric analysis of the dynamic response of railway bridges due to vibrations induced by heavy-haul trains. Struct. Infrastruct. Eng. 2022, 1–14. [Google Scholar] [CrossRef]
- Salehi, M.; Demirlioglu, K.; Erduran, E. Evaluation of the effect of operational modal analysis algorithms on identified modal parameters of railway bridges. In Proceedings of the IABSE Congress, Ghent—Structural Engineering for Future Societal Needs, Ghent, Belgium, 22–24 September 2021. [Google Scholar]
- Salehi, M.; Erduran, E. Identification of boundary conditions of railway bridges using artificial neural networks. J. Civ. Struct. Health Monit. 2022, 12, 1223–1246. [Google Scholar] [CrossRef]
- Vaiana, N.; Sessa, S.; Marmo, F.; Rosati, L. Nonlinear dynamic analysis of hysteretic mechanical systems by combining a novel rate-independent model and an explicit time integration method. Nonlinear Dyn. 2019, 98, 2879–2901. [Google Scholar] [CrossRef]
- Biggs, J.M.; Biggs, J. Introduction to Structural Dynamics; McGraw-Hill: New York, NY, USA, 1964. [Google Scholar]
- Glatz, B.; Fink, J. A redesigned approach to the additional damping method in the dynamic analysis of simply supported railway bridges. Eng. Struct. 2021, 241, 112415. [Google Scholar] [CrossRef]
















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erduran, E.; Nordli, C.; Gonen, S. Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction. Appl. Sci. 2022, 12, 11952. https://doi.org/10.3390/app122311952
Erduran E, Nordli C, Gonen S. Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction. Applied Sciences. 2022; 12(23):11952. https://doi.org/10.3390/app122311952
Chicago/Turabian StyleErduran, Emrah, Christian Nordli, and Semih Gonen. 2022. "Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction" Applied Sciences 12, no. 23: 11952. https://doi.org/10.3390/app122311952
APA StyleErduran, E., Nordli, C., & Gonen, S. (2022). Effect of Elastomeric Bearing Stiffness on the Dynamic Response of Railway Bridges Considering Vehicle–Bridge Interaction. Applied Sciences, 12(23), 11952. https://doi.org/10.3390/app122311952