
RIS-Assisted High-Speed Communications with Time-Varying Distance-Dependent Rician Channels


Abstract
1. Introduction
- We propose a time-varying channel model for RIS-assisted HSC systems. Compared to previous works, our model contains NLoS (or Rayleigh fading) components, distance-dependent Rician factors, and DS terms;
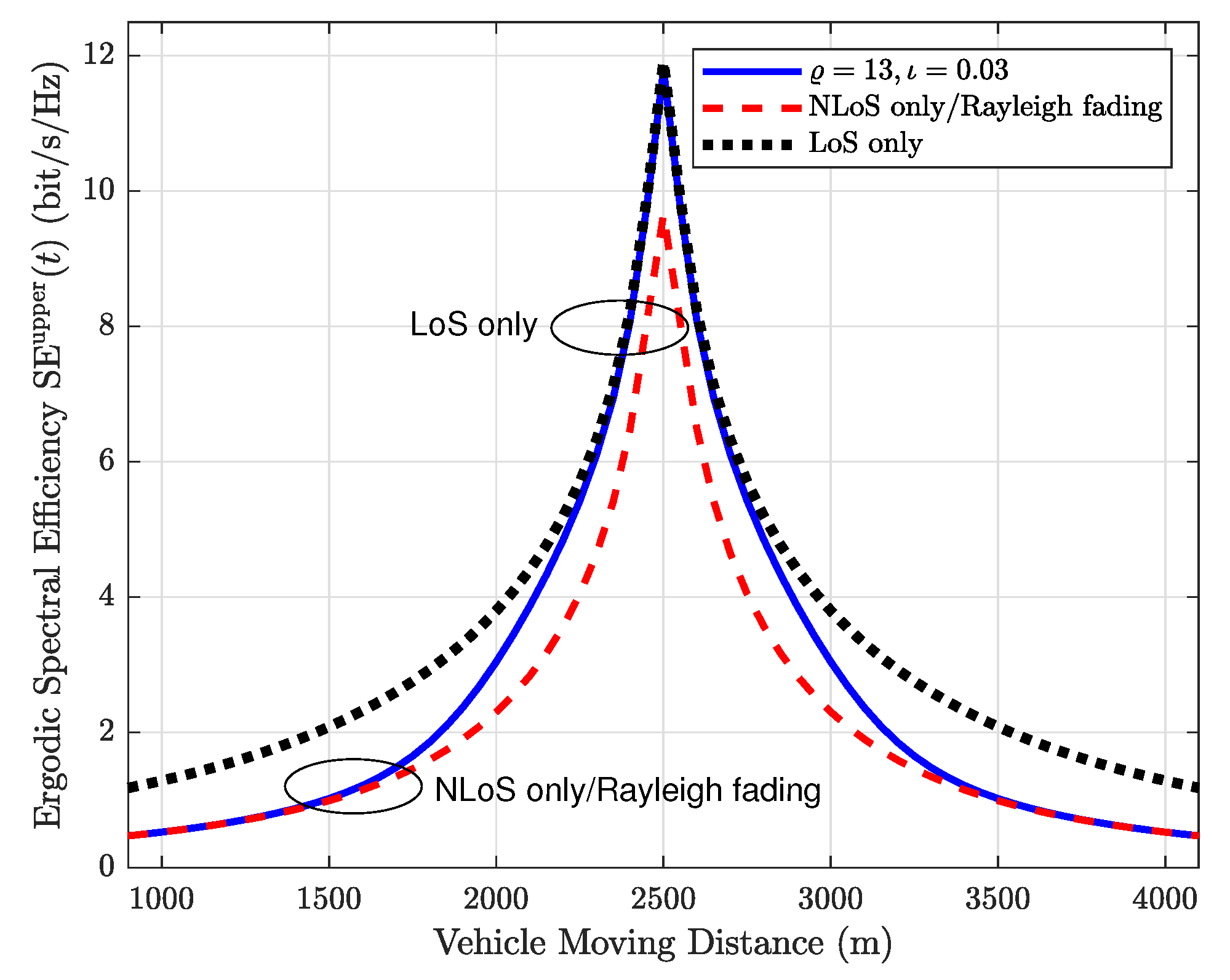
- We show that when the moving user is far from the BS and the RIS, the Rayleigh fading dominates the channel. However, when they are close, the channel is almost equivalent to the LoS channel;
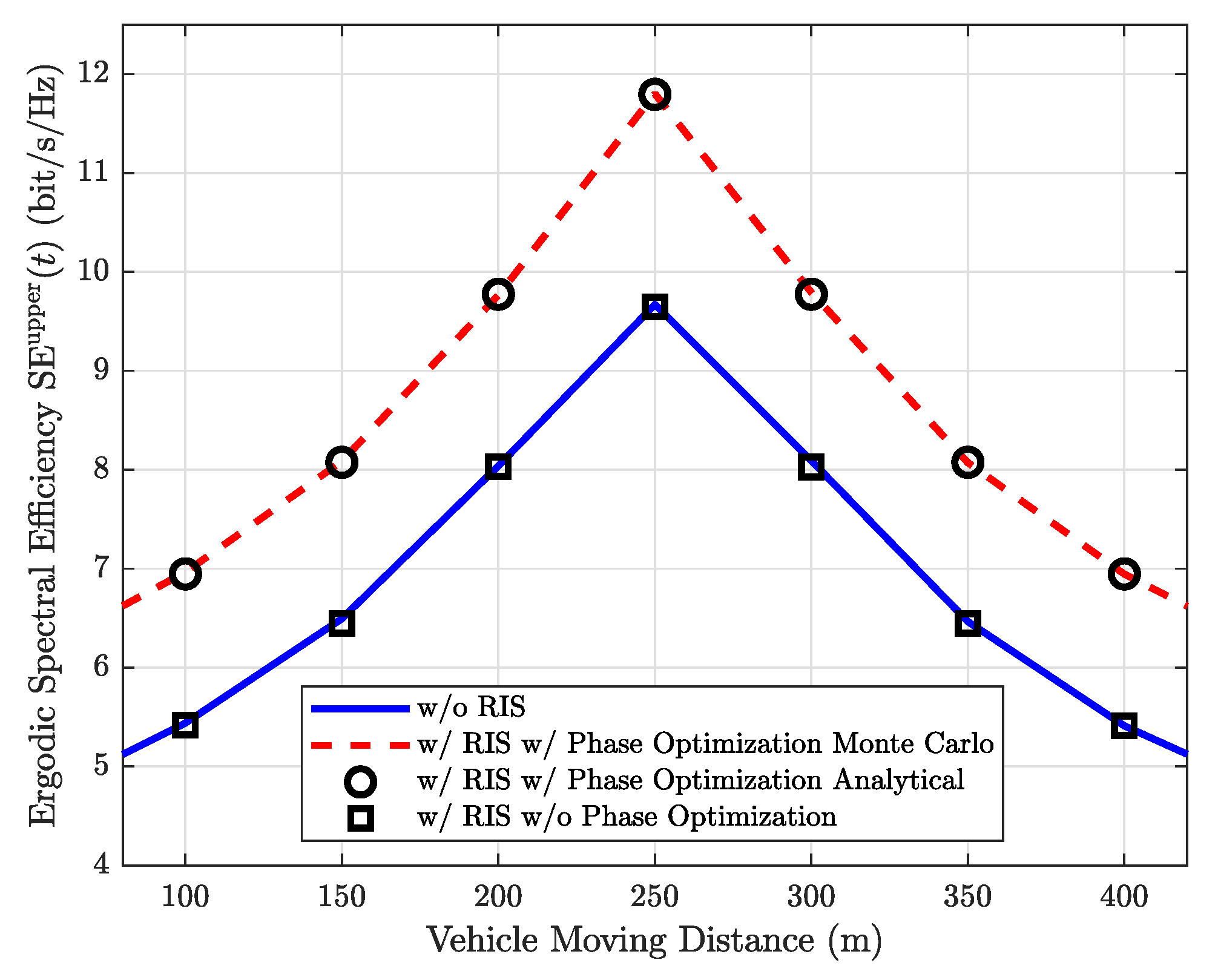
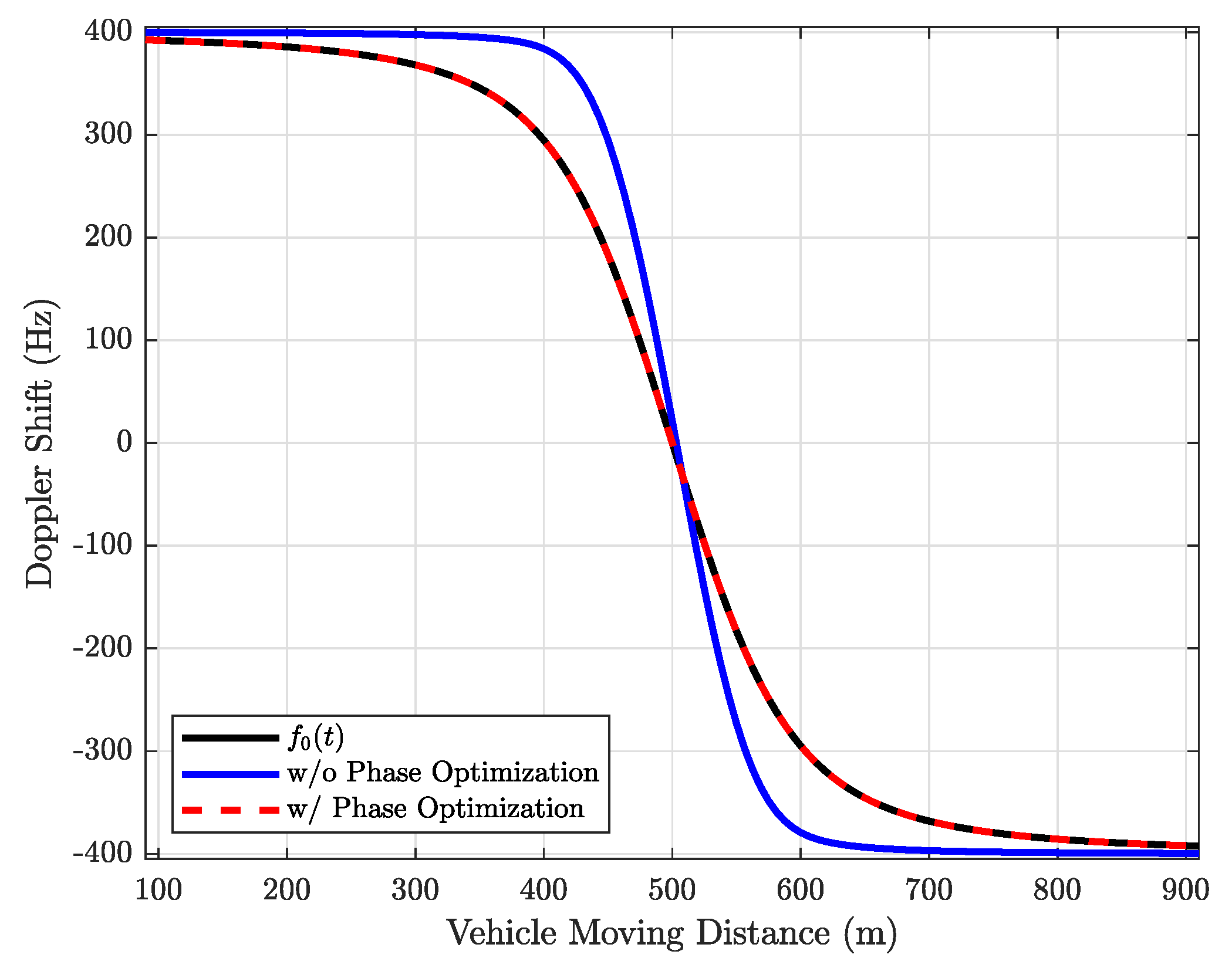
- For the proposed channel model, we further show that using RIS phase shift optimization, the DS of the cascaded links can be aligned to the DS of the direct link. Furthermore, the DS can be completely eliminated when the direct link is obstructed;
- We derive the closed-form expressions for the ergodic spectral efficiency and outage probability of the proposed system. Besides, it is shown that the deployment strategy has an impact on the system performance.
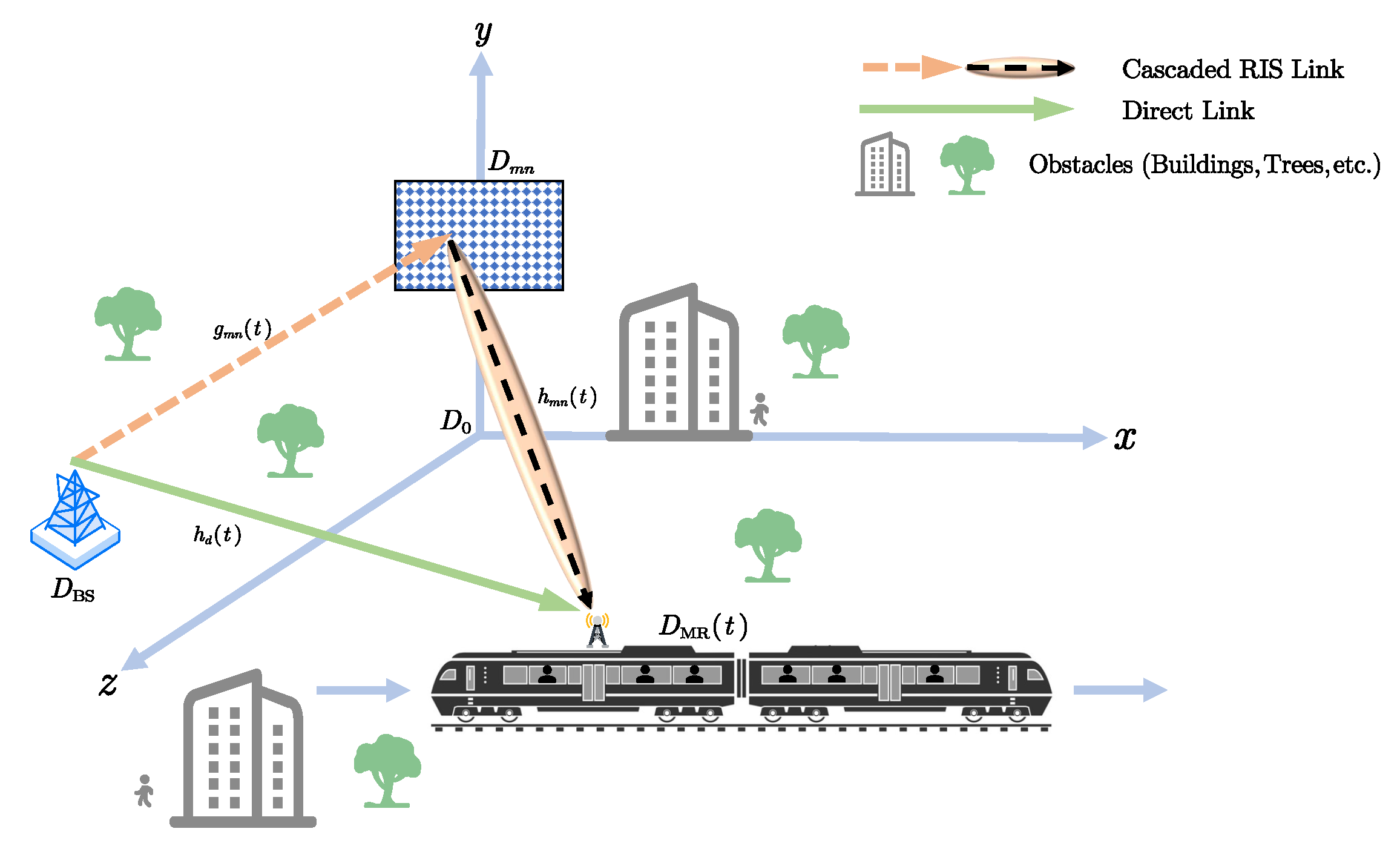
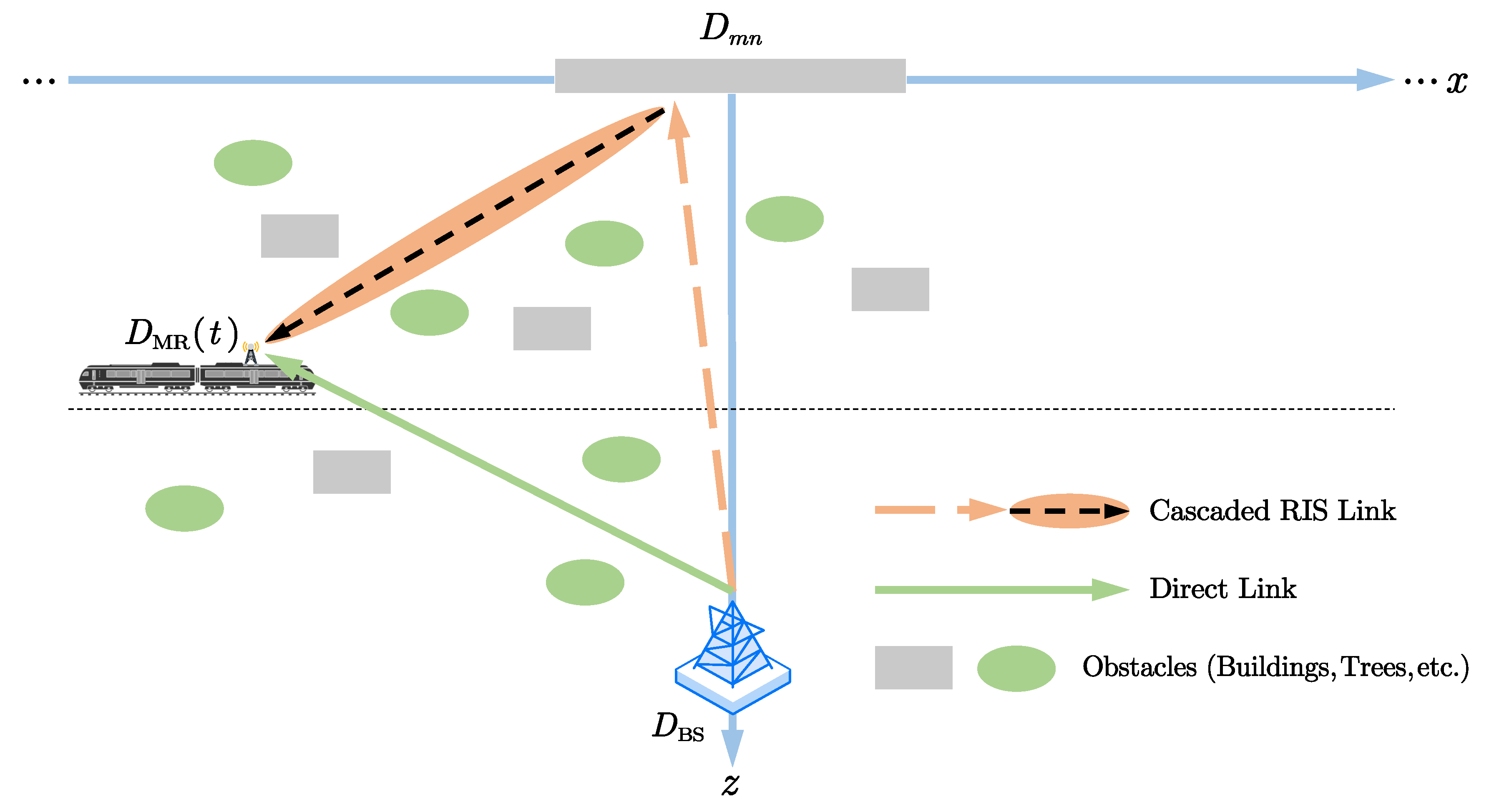
2. System Model with Time-Varying Distance-Dependent Rician Channels
2.1. Direct Link from the BS to the MR
2.2. Cascaded RIS Link from the BS to the RIS and from RIS to the MR
2.3. Distance-Dependent Rician Factors
3. Received Power Maximization and Doppler Shift Alignment
3.1. Received Power Maximization
3.2. Doppler Shift Alignment
4. Performance Analysis
4.1. Ergodic Spectral Efficiency
4.2. Outage Probability
5. Numerical Evaluations and Discussion
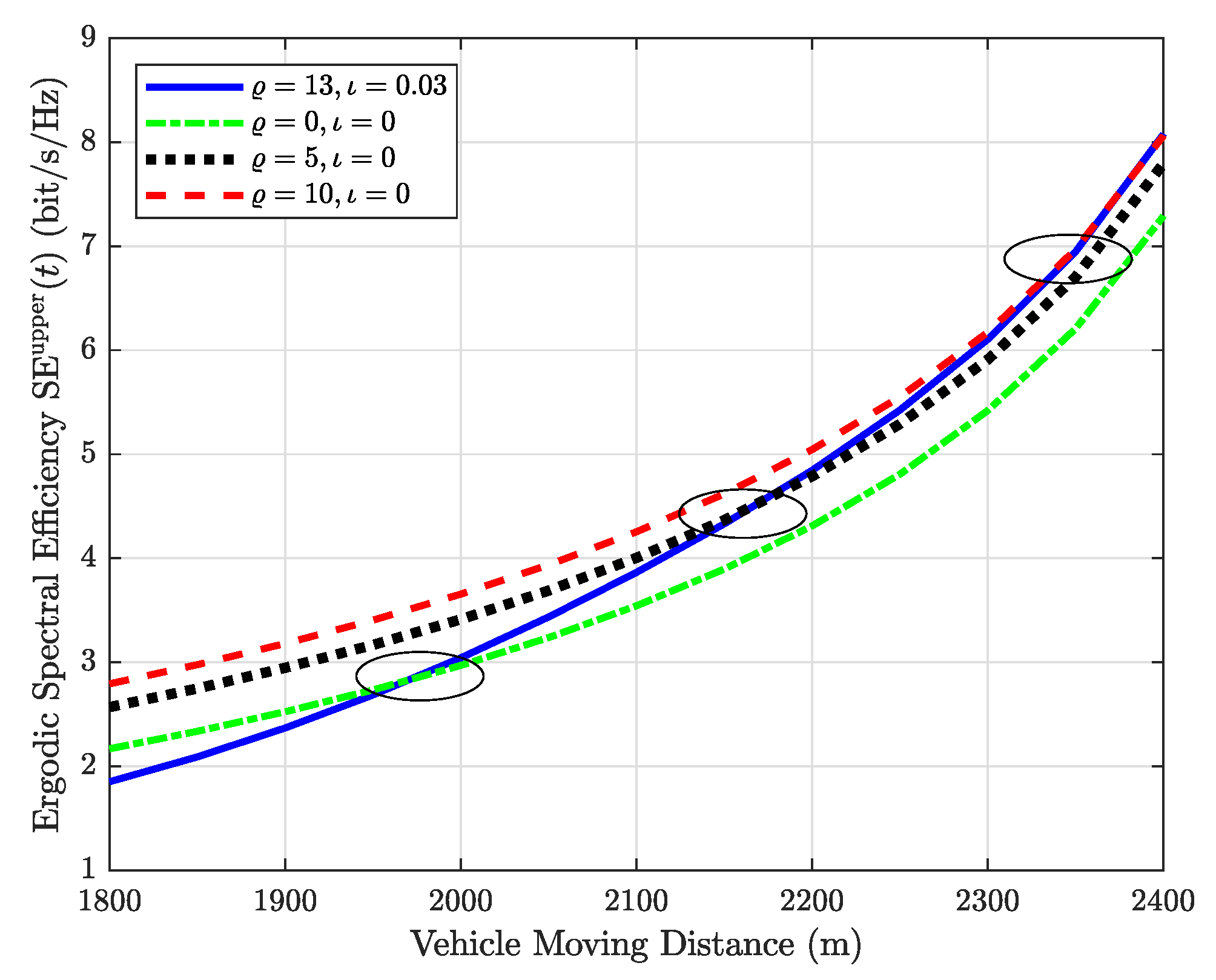
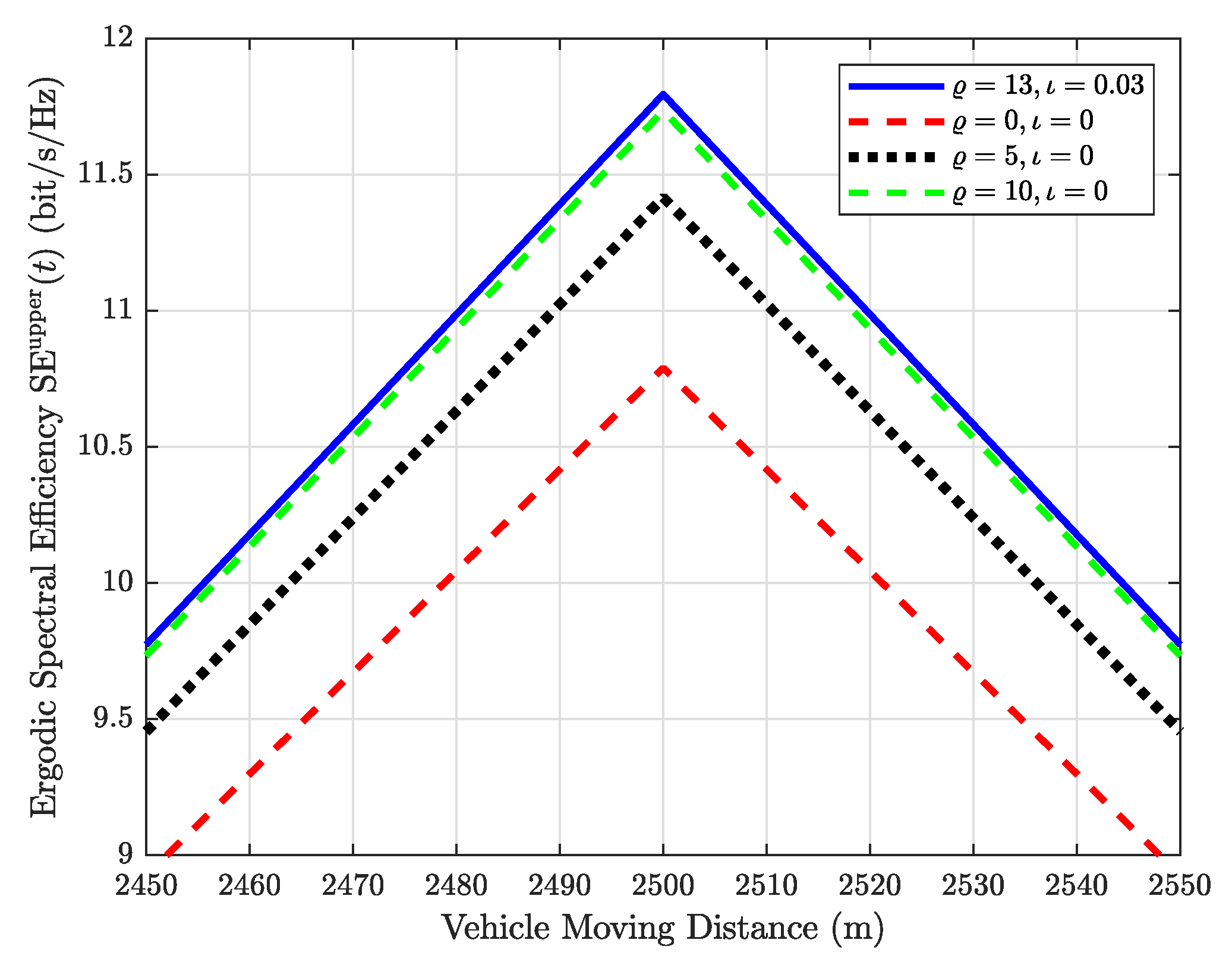
5.1. Ergodic Spectral Efficiency
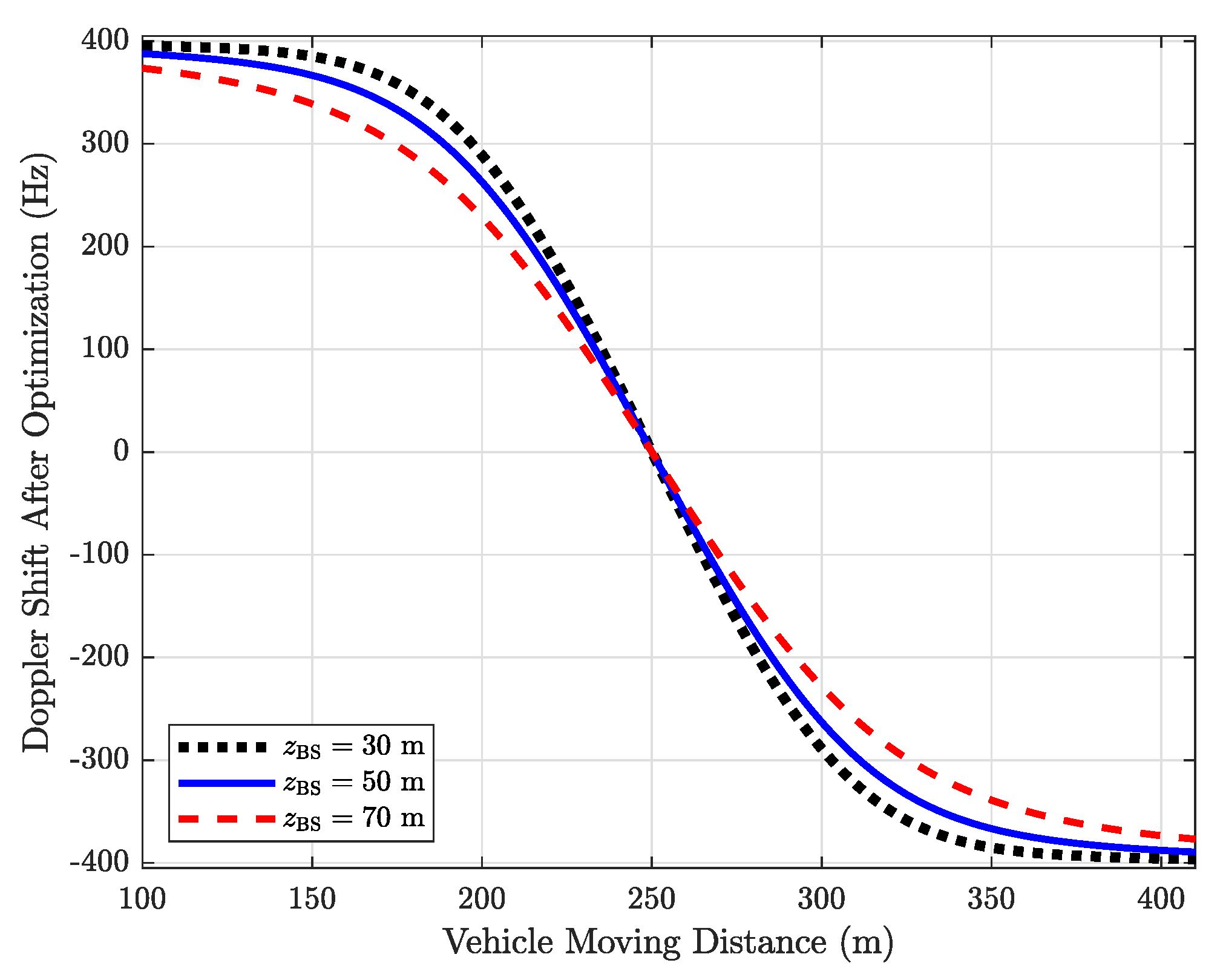
5.2. Doppler Shift
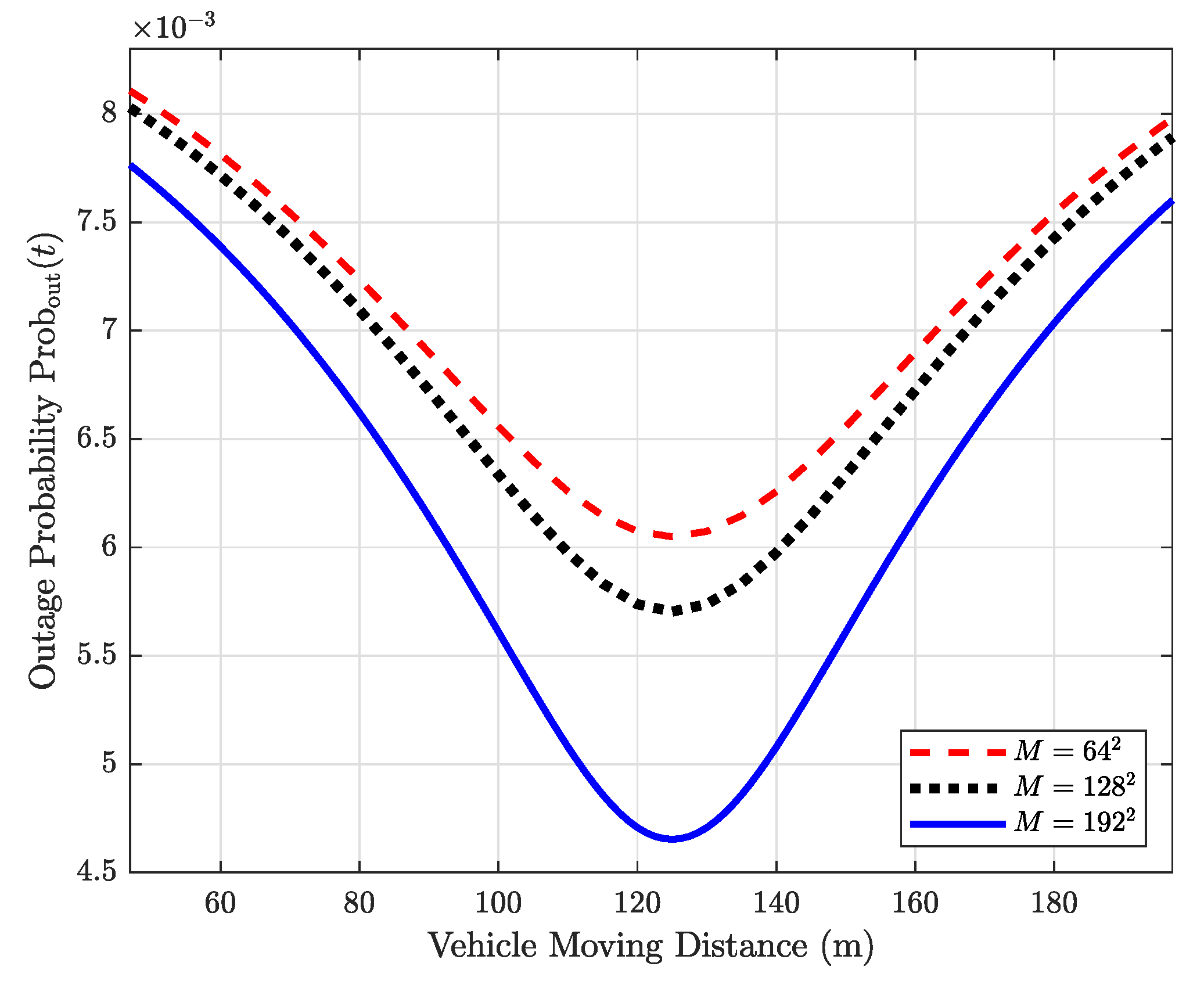
5.3. Outage Probability
5.4. Deployment Analysis
6. Conclusions and Future Works
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Proposition 1
Appendix B. Proof of Proposition 2
Appendix C. Proof of Proposition 3
References
- Renzo, M.; Zappone, A.; Debbah, M.; Alouini, M.S.; Tretyakov, S. Smart Radio Environments Empowered by Reconfigurable Intelligent Surfaces: How it Works, State of Research, and Road Ahead. IEEE J. Sel. Areas Commun. 2020, 38, 2450–2525. [Google Scholar] [CrossRef]
- Pan, C.; Zhou, G.; Zhi, K.; Hong, S.; Wu, T.; Pan, Y.; Ren, H.; Di Renzo, M.; Swindlehurst, A.L.; Zhang, R.; et al. An overview of signal processing techniques for ris/irs-aided wireless systems. IEEE J. Sel. Top. Signal Process. 2022, 16, 883–917. [Google Scholar] [CrossRef]
- Keykhosravi, K.; Keskin, M.F.; Seco-Granados, G.; Popovski, P.; Wymeersch, H. Ris-enabled siso localization under user mobility and spatial-wideband effects. IEEE J. Sel. Top. Signal Process. 2022, 16, 1125–1140. [Google Scholar] [CrossRef]
- Ibrahim, H.; Tabassum, H.; Nguyen, U.T. Exact coverage analysis of intelligent reflecting surfaces with nakagami-m channels. IEEE Trans. Veh. Technol. 2021, 70, 1072–1076. [Google Scholar] [CrossRef]
- Ai, B.; Molisch, A.F.; Rupp, M.; Zhong, Z.-D. 5g key technologies for smart railways. Proc. IEEE 2020, 108, 856–893. [Google Scholar] [CrossRef]
- Zhang, J.; Liu, H.; Wu, Q.; Jin, Y.; Chen, Y.; Ai, B.; Jin, S.; Cui, T.J. Ris-aided next-generation high-speed train communications: Challenges, solutions, and future directions. IEEE Wirel. Commun. 2021, 28, 145–151. [Google Scholar] [CrossRef]
- Huang, Z.; Zheng, B.; Zhang, R. Transforming fading channel from fast to slow: Intelligent refracting surface aided high-mobility communication. IEEE Trans. Wirel. Commun. 2022, 21, 4989–5003. [Google Scholar] [CrossRef]
- Xu, C.; An, J.; Bai, T.; Xiang, L.; Sugiura, S.; Maunder, R.G.; Yang, L.-L.; Hanzo, L. Reconfigurable intelligent surface assisted multi-carrier wireless systems for doubly selective high-mobility ricean channels. IEEE Trans. Veh. Technol. 2022, 71, 4023–4041. [Google Scholar] [CrossRef]
- Xu, J.; Ai, B. When mmwave high-speed railway networks meet reconfigurable intelligent surface: A deep reinforcement learning method. IEEE Wirel. Commun. Lett. 2021, 11, 533–537. [Google Scholar] [CrossRef]
- Wang, K.; Lam, C.-T.; Ng, B.K. IRS-Aided Predictable High-Mobility Vehicular Communication with Doppler Effect Mitigation. In Proceedings of the 2021 IEEE 93rd Vehicular Technology Conference (VTC2021-Spring), Helsinki, Finland, 25–28 April 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Wang, K.; Lam, C.-T.; Ng, B.K. Doppler effect mitigation using reconfigurable intelligent surfaces with hardware impairments. In Proceedings of the 2021 IEEE Globecom Workshops (GC Wkshps), Madrid, Spain, 7–11 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- Wang, K.; Lam, C.-T.; Ng, B.K. Positioning information based high-speed communications with multiple riss: Doppler mitigation and hardware impairments. Appl. Sci. 2022, 12, 7076. [Google Scholar] [CrossRef]
- Wu, J.; Fan, P. A survey on high mobility wireless communications: Challenges, opportunities and solutions. IEEE Access 2016, 4, 450–476. [Google Scholar] [CrossRef]
- Matthiesen, B.; Björnson, E.; Carvalho, E.D.; Popovski, P. Intelligent Reflecting Surface Operation under Predictable Receiver Mobility: A Continuous Time Propagation Model. IEEE Wirel. Commun. Lett. 2021, 10, 216–220. [Google Scholar] [CrossRef]
- Björnson, E.; Wymeersch, H.; Matthiesen, B.; Popovski, P.; Sanguinetti, L.; de Carvalho, E. Reconfigurable intelligent surfaces: A signal processing perspective with wireless applications. IEEE Signal Process. Mag. 2022, 39, 135–158. [Google Scholar] [CrossRef]
- Basar, E. Reconfigurable intelligent surfaces for doppler effect and multipath fading mitigation. Front. Commun. Netw. 2021, 2, 14. [Google Scholar] [CrossRef]
- Xiong, B.; Zhang, Z.; Jiang, H.; Zhang, H.; Zhang, J.; Wu, L.; Dang, J. A statistical mimo channel model for reconfigurable intelligent surface assisted wireless communications. IEEE Trans. Commun. 2021, 70, 1360–1375. [Google Scholar] [CrossRef]
- Sun, G.; He, R.; Ai, B.; Ma, Z.; Li, P.; Niu, Y.; Ding, J.; Fei, D.; Zhong, Z. A 3d wideband channel model for ris-assisted mimo communications. IEEE Trans. Veh. Technol. 2022, 71, 8016–8029. [Google Scholar] [CrossRef]
- Gao, M.; Ai, B.; Niu, Y.; Han, Z.; Zhong, Z. Irs-assisted high-speed train communications: Outage probability minimization with statistical csi. In Proceedings of the ICC 2021—IEEE International Conference on Communications, Virtual Event, 14–23 June 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–6. [Google Scholar]
- 3rd Generation Partnership Project. Technical Specification Group Radio Access Network. Spatial Channel Model for Multiple Input Multiple Output (Mimo) Simulations. 3GPP TR 25.996 V14.0.0. March 2017. Available online: https://portal.3gpp.org/desktopmodules/Specifications/SpecificationDetails.aspx?specificationId=1382 (accessed on 4 July 2017).
- Han, Y.; Tang, W.; Jin, S.; Wen, C.-K.; Ma, X. Large intelligent surface-assisted wireless communication exploiting statistical csi. IEEE Trans. Veh. Technol. 2019, 68, 8238–8242. [Google Scholar] [CrossRef]
- Goldsmith, A. Wireless Communications; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Zhang, Y.; Zhang, J.; Ng, D.W.K.; Xiao, H.; Ai, B. Performance analysis of reconfigurable intelligent surface assisted systems under channel aging. Intell. Converg. Netw. 2022, 3, 74–85. [Google Scholar] [CrossRef]
- Kapinas, V.M.; Mihos, S.K.; Karagiannidis, G.K. On the monotonicity of the generalized marcum and nuttall q-functions. IEEE Trans. Inf. Theory 2009, 55, 3701–3710. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Consider the NLoS Part? | Consider the DS Term? | Consider the Distance- Dependent Rician Factor? | Modeling Complexity | |
|---|---|---|---|---|
| [10,11,14,15] | No | No | No | Low |
| [12,16,19] | Yes | No | No | Low |
| [7] | Yes | Yes | No | Moderate |
| [8] | Yes | Yes | No | High |
| [17,18] | Yes | Yes | No | High |
| Ours | Yes | Yes | Yes | Low |
| Parameters | Values |
|---|---|
| BS position () | meter (m) |
| MR position () | m |
| RIS height (r) | 15 m |
| Speed of the vehicle (v) | 180 km/h |
| Transmit power () | 20 dBm |
| Additive noise () | −80 dBm |
| Carrier frequency () | 2.4 GHz |
| Element size (, ) | m, m |
| Number of elements (M) | |
| Environmental parameters (, ) | 13, |
| SNR threshold () | 10 dB |
| Realization number |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, K.; Lam, C.-T.; Ng, B.K. RIS-Assisted High-Speed Communications with Time-Varying Distance-Dependent Rician Channels. Appl. Sci. 2022, 12, 11857. https://doi.org/10.3390/app122211857
Wang K, Lam C-T, Ng BK. RIS-Assisted High-Speed Communications with Time-Varying Distance-Dependent Rician Channels. Applied Sciences. 2022; 12(22):11857. https://doi.org/10.3390/app122211857
Chicago/Turabian StyleWang, Ke, Chan-Tong Lam, and Benjamin K. Ng. 2022. "RIS-Assisted High-Speed Communications with Time-Varying Distance-Dependent Rician Channels" Applied Sciences 12, no. 22: 11857. https://doi.org/10.3390/app122211857
APA StyleWang, K., Lam, C.-T., & Ng, B. K. (2022). RIS-Assisted High-Speed Communications with Time-Varying Distance-Dependent Rician Channels. Applied Sciences, 12(22), 11857. https://doi.org/10.3390/app122211857