
Advanced Dynamic Thermal Vibration of Laminated FGM Plates with Simply Homogeneous Equation by Using TSDT and Nonlinear Varied Shear Coefficient


Abstract
1. Introduction
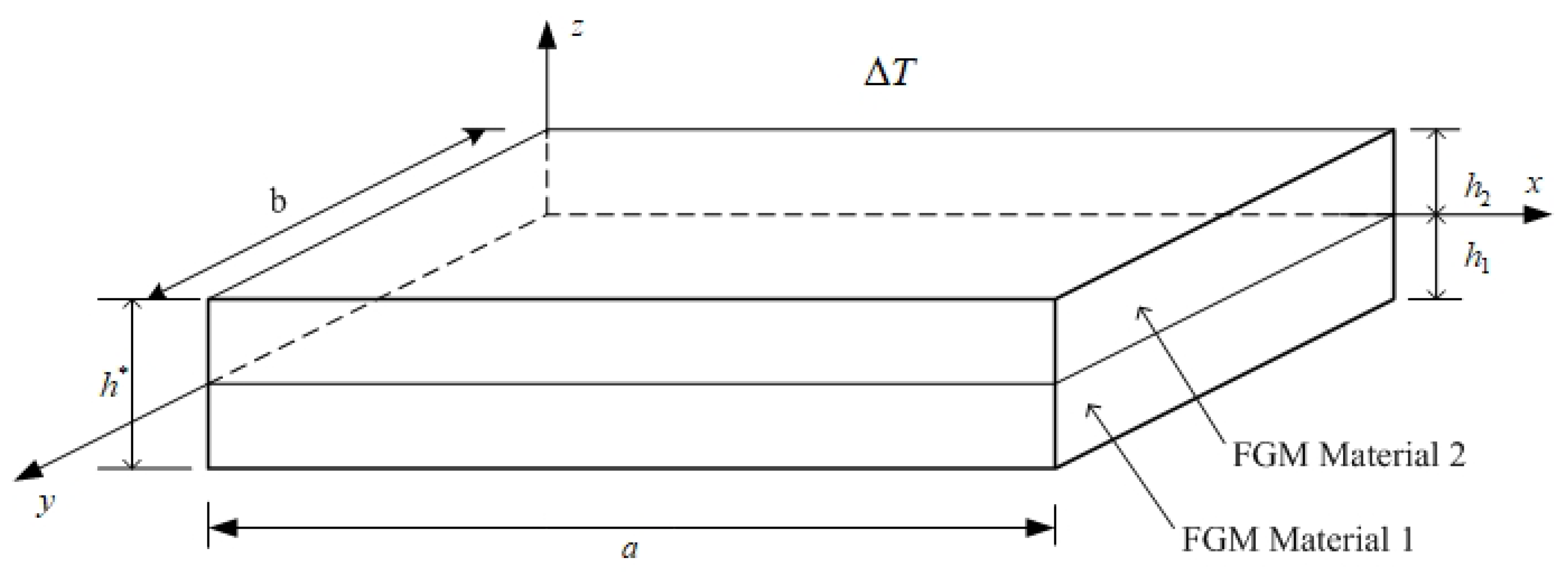
2. Formulation Procedures
- ,
- ,
3. Some Numerical Results and Discussions
3.1. Dynamic Convergence Study
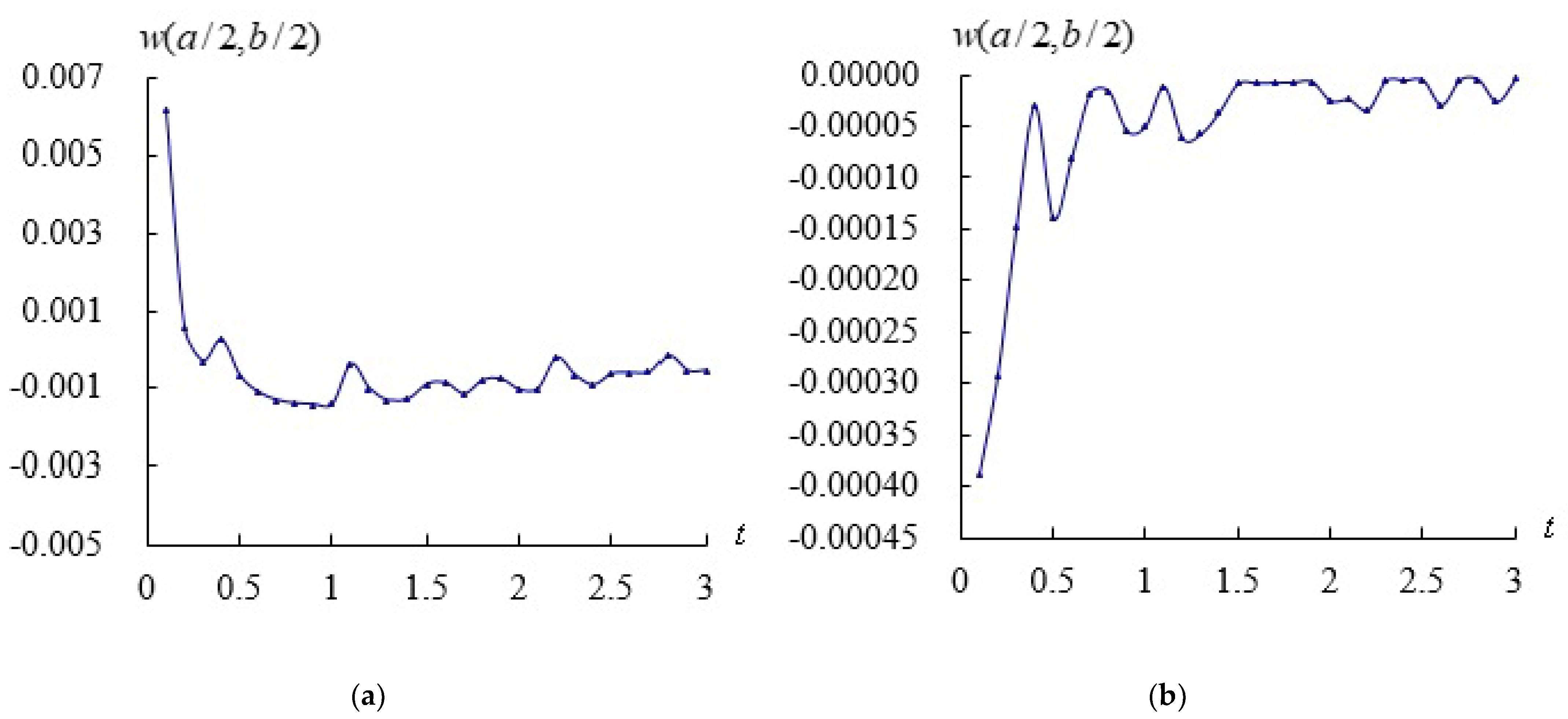
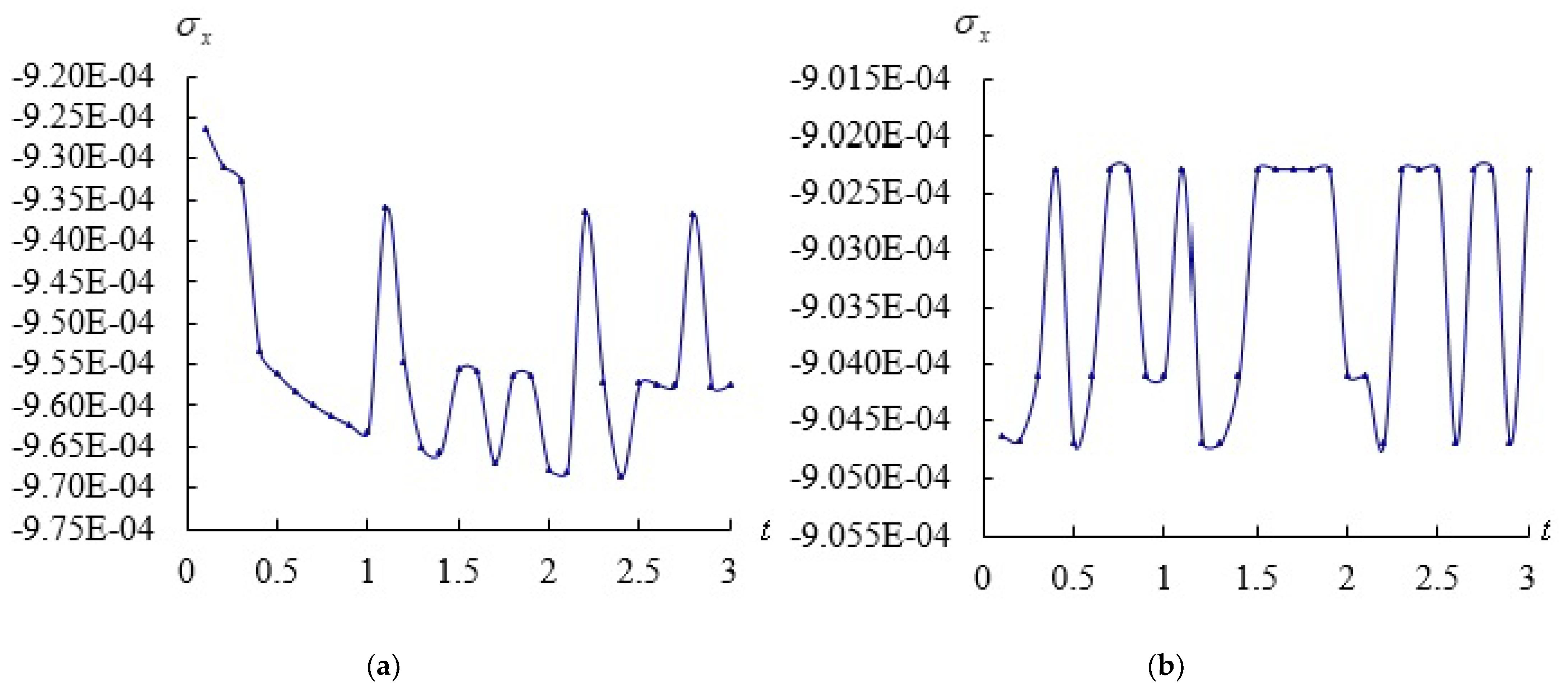
3.2. Time Responses of Deflection and Stress
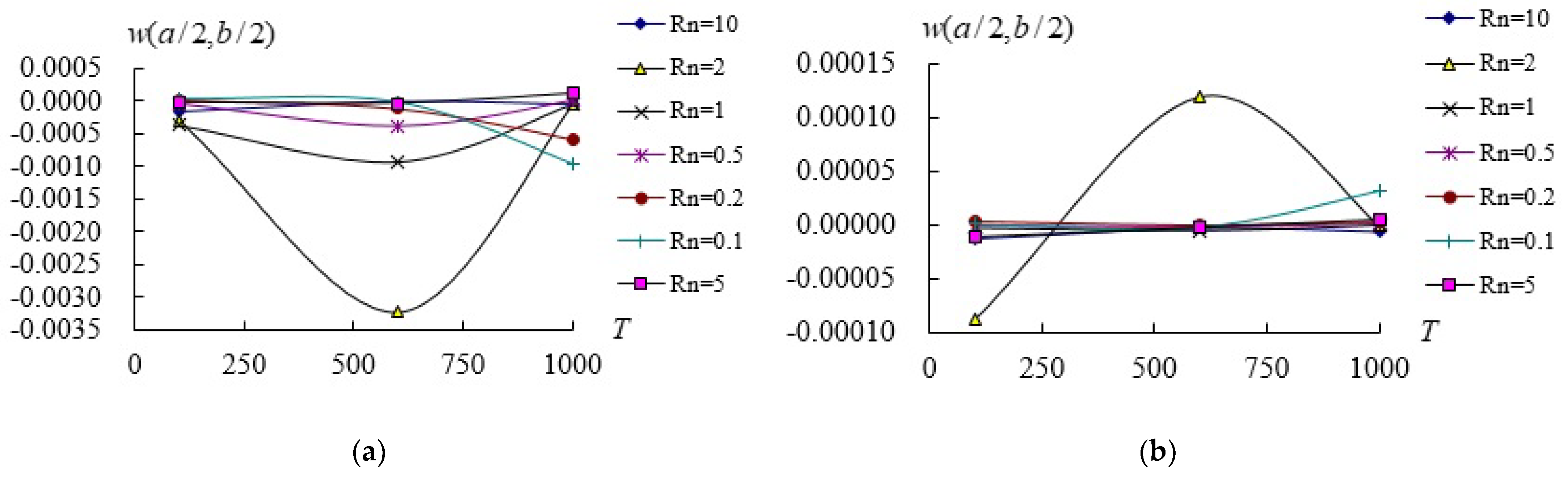
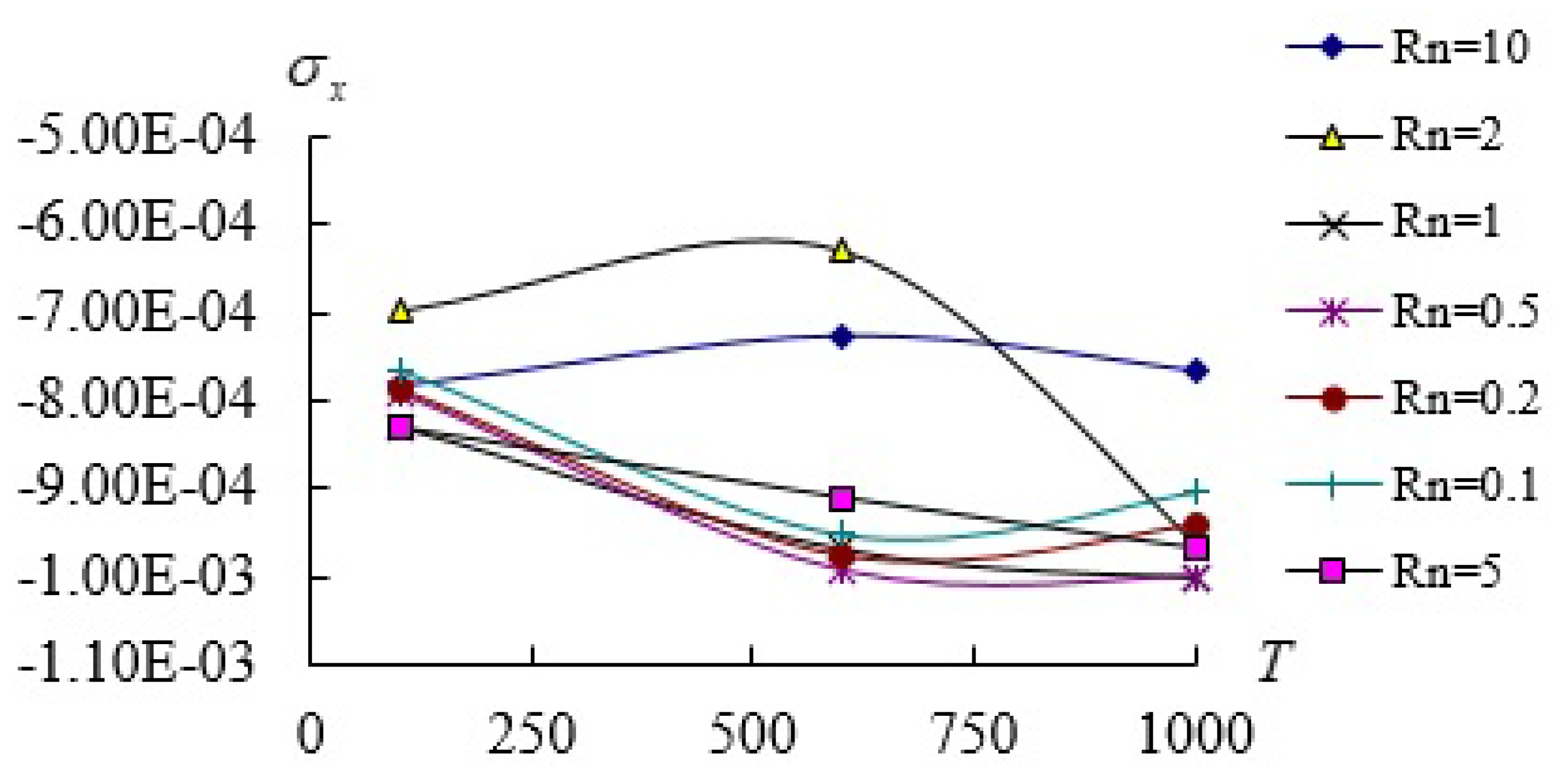
3.3. Deflection and Stress vs. T and Rn
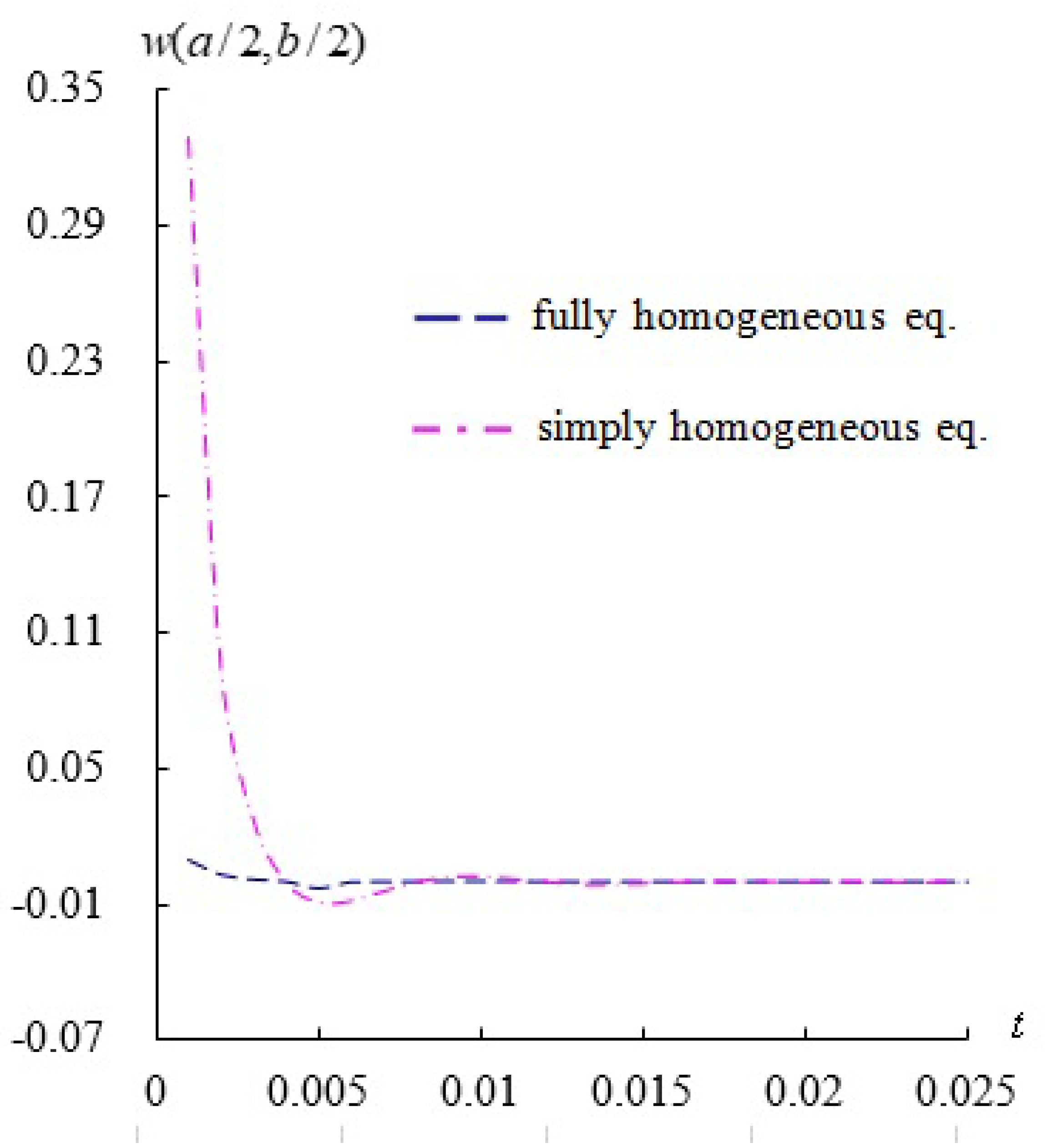
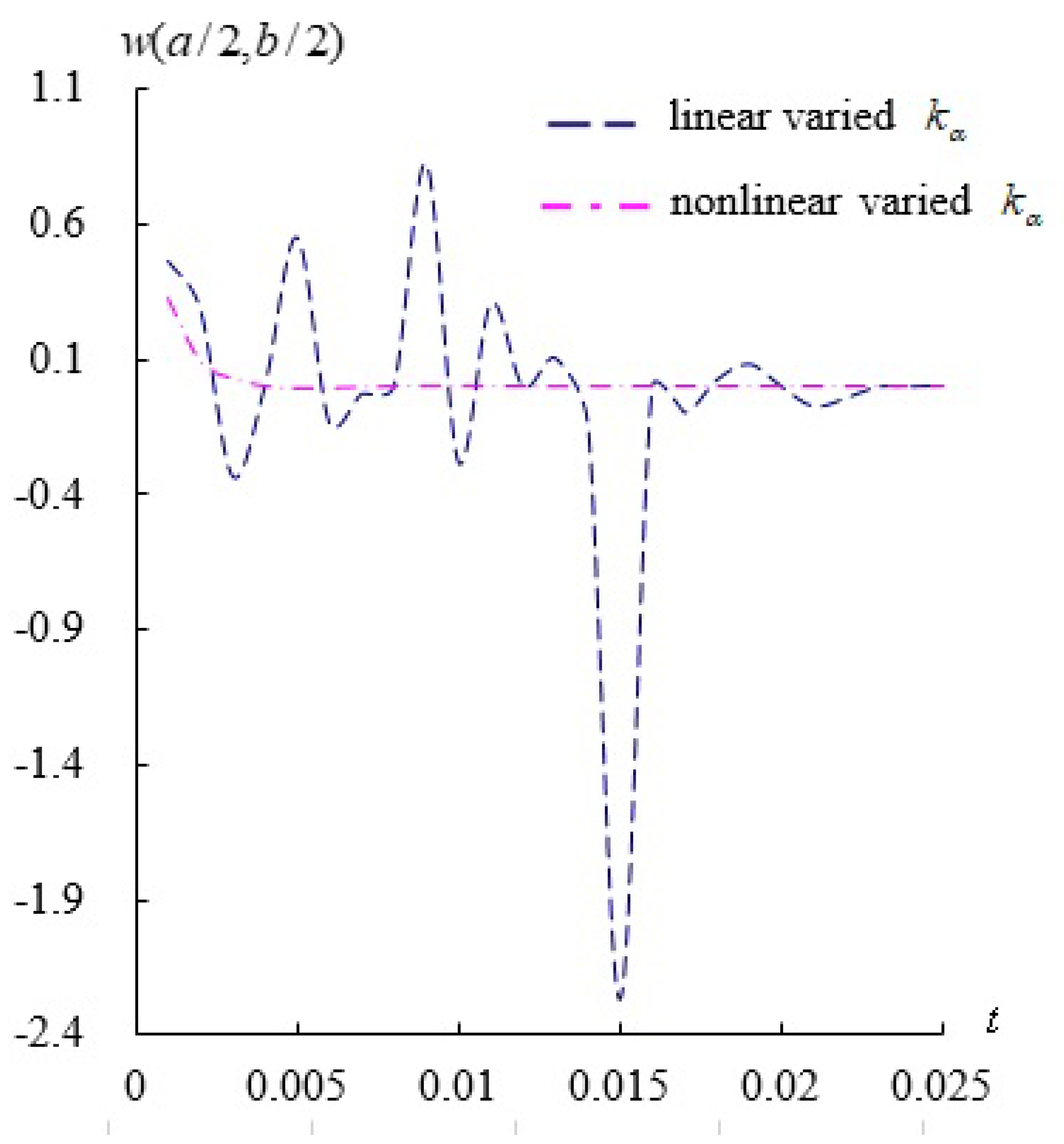
3.4. Transient Responses of Deflection and Stress
3.5. Future Works
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| (unit 1/s) | |||||||||
| 5 | 0.030248 | 0.012079 | 0.010355 | 0.005455 | 0.003399 | 0.007451 | 0.006401 | 0.005629 | 0.005048 |
| 10 | 0.060513 | 0.042673 | 0.035361 | 0.020371 | 0.015934 | 0.031821 | 0.014847 | 0.011815 | 0.006108 |
| (unit 1/s) | |||||||||
| 5 | 0.019082 | 0.009523 | 0.010442 | 0.004176 | 0.007139 | 0.007156 | 0.006237 | 0.005555 | 0.005061 |
| 10 | 0.023112 | 0.030248 | 0.014602 | 0.012079 | 0.015355 | 0.010355 | 0.015735 | 0.005455 | 0.006460 |
| (unit 1/s) | |||||||||
| 5 | 0.008481 | 0.007713 | 0.010970 | 0.009022 | 0.007734 | 0.006781 | 0.006089 | 0.006744 | 0.001734 |
| 10 | 0.027054 | 0.023712 | 0.012403 | 0.016924 | 0.009628 | 0.011476 | 0.015462 | 0.004309 | 0.006783 |
| (unit 1/s) | |||||||||
| 5 | 0.010463 | 0.009661 | 0.008689 | 0.007765 | 0.007011 | 0.006711 | 0.002147 | 0.001856 | 0.001620 |
| 10 | 0.012677 | 0.019082 | 0.010558 | 0.009523 | 0.012944 | 0.010442 | 0.013141 | 0.004176 | 0.007080 |
| (unit 1/s) | |||||||||
| 5 | 0.005210 | 0.007929 | 0.007340 | 0.006738 | 0.006999 | 0.002301 | 0.001972 | 0.001712 | 0.001502 |
| 10 | 0.010366 | 0.015779 | 0.014532 | 0.008480 | 0.008050 | 0.017151 | 0.011124 | 0.004087 | 0.008826 |
| (unit 1/s) | |||||||||
| 5 | 0.006944 | 0.006693 | 0.006307 | 0.005852 | 0.005405 | 0.004941 | 0.004526 | 0.004152 | 0.003821 |
| 10 | 0.008856 | 0.008481 | 0.008063 | 0.007713 | 0.008185 | 0.010970 | 0.009856 | 0.009022 | 0.003542 |
| (unit 1/s) | |||||||||
| 5 | 0.005915 | 0.005753 | 0.005469 | 0.005921 | 0.005027 | 0.004625 | 0.004279 | 0.003964 | 0.003679 |
| 10 | 0.012552 | 0.008211 | 0.011614 | 0.010954 | 0.010263 | 0.009585 | 0.006448 | 0.008361 | 0.007834 |
| (unit 1/s) | |||||||||
| 5 | 0.005130 | 0.005009 | 0.006575 | 0.005036 | 0.004590 | 0.004284 | 0.004006 | 0.003746 | 0.003506 |
| 10 | 0.010707 | 0.010463 | 0.010102 | 0.009661 | 0.009180 | 0.008689 | 0.004282 | 0.007765 | 0.007361 |
| (unit 1/s) | |||||||||
| 5 | 0.004509 | 0.007183 | 0.005173 | 0.004502 | 0.004205 | 0.003967 | 0.003743 | 0.003530 | 0.003328 |
| 10 | 0.005754 | 0.005626 | 0.005439 | 0.005199 | 0.004907 | 0.007963 | 0.007584 | 0.007228 | 0.006915 |
References
- Zenkour, A.M.; El-Shahrany, H.D. Vibration suppression of advanced plates embedded magnetostrictive layers via various theories. J. Mater. Res. Technol. 2020, 9, 4727–4748. [Google Scholar] [CrossRef]
- Wu, D.; Lin, L.; Ren, H. Thermal/vibration joint experimental investigation on lightweight ceramic insulating material for hypersonic vehicles in extremely high-temperature environment up to 1500 °C. Ceram. Int. 2020, 46, 14439–14447. [Google Scholar] [CrossRef]
- Shariyat, M.; Mohammadjani, R. 3D nonlinear variable strain-rate-dependent-order fractional thermoviscoelastic dynamic stress investigation and vibration of thick transversely graded rotating annular plates/discs. Appl. Math. Model. 2020, 84, 287–323. [Google Scholar] [CrossRef]
- Fan, Z.; Liu, Y.; Chen, X.; Jiang, Y.; Zhang, S.; Wang, Y. Research on fatigue of TSV-Cu under thermal and vibration coupled bade on numerical analysis. Microelectron. Reliab. 2020, 106, 113590. [Google Scholar] [CrossRef]
- Su, Z.; Wang, L.; Sun, K.; Wang, D. Vibration characteristic and flutter analysis of electrically restrained stiffened functionally graded plates in thermal environment. Int. J. Mech. Sci. 2019, 157–158, 872–884. [Google Scholar] [CrossRef]
- Fang, J.; Gu, J.; Wang, H.; Zhang, X. Thermal effect on vibrational behaviors of rotating functionally graded microbeams. Eur. J. Mech. A/Solids 2019, 75, 497–515. [Google Scholar] [CrossRef]
- Duc, N.D.; Cong, P.H.; Quang, V.D. Nonlinear dynamic and vibration analysis of piezoelectric eccentrically stiffened FGM plates in thermal environment. Int. J. Mech. Sci. 2016, 115–116, 711–722. [Google Scholar] [CrossRef]
- Huang, X.L.; Shen, H.S. Vibration and dynamic response of functionally graded plates with piezoelectric actuators in thermal environments. J. Sound Vib. 2006, 289, 25–53. [Google Scholar] [CrossRef]
- Huang, X.L.; Shen, H.S. Nonlinear vibration and dynamic response of functionally graded plates in thermal environments. Int. J. Solids Struct. 2004, 41, 2403–2427. [Google Scholar] [CrossRef]
- Hong, C.C. GDQ computation for thermal vibration of thick FGM plates by using fully homogeneous equation and TSDT. Thin-Walled Struct. 2019, 135, 78–88. [Google Scholar] [CrossRef]
- Hong, C.C. Thermal vibration and transient response of magnetostrictive functionally graded material plates. Eur. J. Mech. A/Solids 2014, 43, 78–88. [Google Scholar] [CrossRef]
- Hong, C.C. Rapid heating induced vibration of magnetostrictive functionally graded material plates. Trans. ASME J. Vib. Acoust. 2012, 134, 021019. [Google Scholar] [CrossRef]
- Lee, S.J.; Reddy, J.N.; Rostam-Abadi, F. Transient analysis of laminated composite plates with embedded smart-material layers. Finite Elem. Anal. Des. 2004, 40, 463–483. [Google Scholar] [CrossRef]
- Reddy, J.N. Energy Principles and Variational Methods in Applied Mechanics; Wiley: New York, NY, USA, 2002. [Google Scholar]
- Hong, C.C. Thermal vibration of magnetostrictive material in laminated plates by the GDQ method. Open Mech. J. 2007, 1, 29–37. [Google Scholar] [CrossRef][Green Version]
- Bert, C.W.; Jang, S.K.; Striz, A.G. Nonlinear bending analysis of orthotropic rectangular plates by the method of differential quadrature. Comput. Mech. 1989, 5, 217–226. [Google Scholar] [CrossRef]
- Shu, C.; Du, H. Implementation of clamped and simply supported boundary conditions in the GDQ free vibration analyses of beams and plates. Int. J. Solids Struct. 1997, 34, 819–835. [Google Scholar] [CrossRef]
- Hong, C.C. Advanced frequency analysis of thick FGM plates using third-order shear deformation theory with a nonlinear shear correction coefficient. J. Struct. Eng. Appl. Mech. 2022, 5, 143–160. [Google Scholar] [CrossRef]
- Sirimontree, S.; Thongchom, C.; Saffari, P.R.; Refahati, N.; Saffari, P.R.; Jearsiripongkul, T.; Keawsawasvong, S. Effects of thermal environment and external mean flow on sound transmission loss of sandwich functionally graded magneto-electro-elastic cylindrical nanoshell. Eur. J. Mech. A/Solids 2023, 97, 104774. [Google Scholar] [CrossRef]







| GDQ Method | (Unit mm) at t = 6 s | |||
|---|---|---|---|---|
| 10 | 7 × 7 | −5.289845 × 10−7 | −1.307268 × 10−6 | −4.786723 × 10−6 |
| 9×9 | −5.290359 × 10−7 | −1.307458 × 10−6 | −4.788880 × 10−6 | |
| 11 × 11 | −5.290720 × 10−7 | −1.307463 × 10−6 | −4.788953 × 10−6 | |
| 13 × 13 | −5.290577 × 10−7 | −1.307423 × 10−6 | −4.788916 × 10−6 | |
| 5 | 7 × 7 | −1.058373 × 10−4 | −5.050262 × 10−5 | −1.163284 × 10−4 |
| 9 × 9 | −1.053382 × 10−4 | −5.060298 × 10−5 | −1.163351 × 10−4 | |
| 11 × 11 | −1.053358 × 10−4 | −5.047129 × 10−5 | −1.163347 × 10−4 | |
| 13 × 13 | −1.057038 × 10−4 | −5.047105 × 10−5 | −1.163352 × 10−4 | |
(1/mm2) | (mm) | |||||||
|---|---|---|---|---|---|---|---|---|
| 92.592598 | 0.12 | −0.448521 | −0.456089 | −0.539418 | −0.922718 | 9.852672 | 0.682434 | 0.491249 |
| 0.925925 | 1.2 | −0.448522 | −0.456090 | −0.539419 | −0.922719 | 9.852635 | 0.682434 | 0.491249 |
| 0.231481 | 2.4 | −0.448522 | −0.456089 | −0.539419 | −0.922719 | 9.852635 | 0.682434 | 0.491249 |
| 0.037037 | 6 | −0.448522 | −0.456089 | −0.539418 | −0.922718 | 9.852679 | 0.682434 | 0.491249 |
| 0.009259 | 12 | −0.448522 | −0.456089 | −0.539418 | −0.922718 | 9.852675 | 0.682434 | 0.491249 |
| 0 | 1.2 | 0.899095 | 0.957858 | 1.091129 | 1.200860 | 1.232039 | 1.126363 | 1.021824 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hong, C.-C. Advanced Dynamic Thermal Vibration of Laminated FGM Plates with Simply Homogeneous Equation by Using TSDT and Nonlinear Varied Shear Coefficient. Appl. Sci. 2022, 12, 11776. https://doi.org/10.3390/app122211776
Hong C-C. Advanced Dynamic Thermal Vibration of Laminated FGM Plates with Simply Homogeneous Equation by Using TSDT and Nonlinear Varied Shear Coefficient. Applied Sciences. 2022; 12(22):11776. https://doi.org/10.3390/app122211776
Chicago/Turabian StyleHong, Chih-Chiang. 2022. "Advanced Dynamic Thermal Vibration of Laminated FGM Plates with Simply Homogeneous Equation by Using TSDT and Nonlinear Varied Shear Coefficient" Applied Sciences 12, no. 22: 11776. https://doi.org/10.3390/app122211776
APA StyleHong, C.-C. (2022). Advanced Dynamic Thermal Vibration of Laminated FGM Plates with Simply Homogeneous Equation by Using TSDT and Nonlinear Varied Shear Coefficient. Applied Sciences, 12(22), 11776. https://doi.org/10.3390/app122211776