
The Use of a Movable Vehicle in a Stationary Condition for Indirect Bridge Damage Detection Using Baseline-Free Methodology


Abstract
1. Introduction
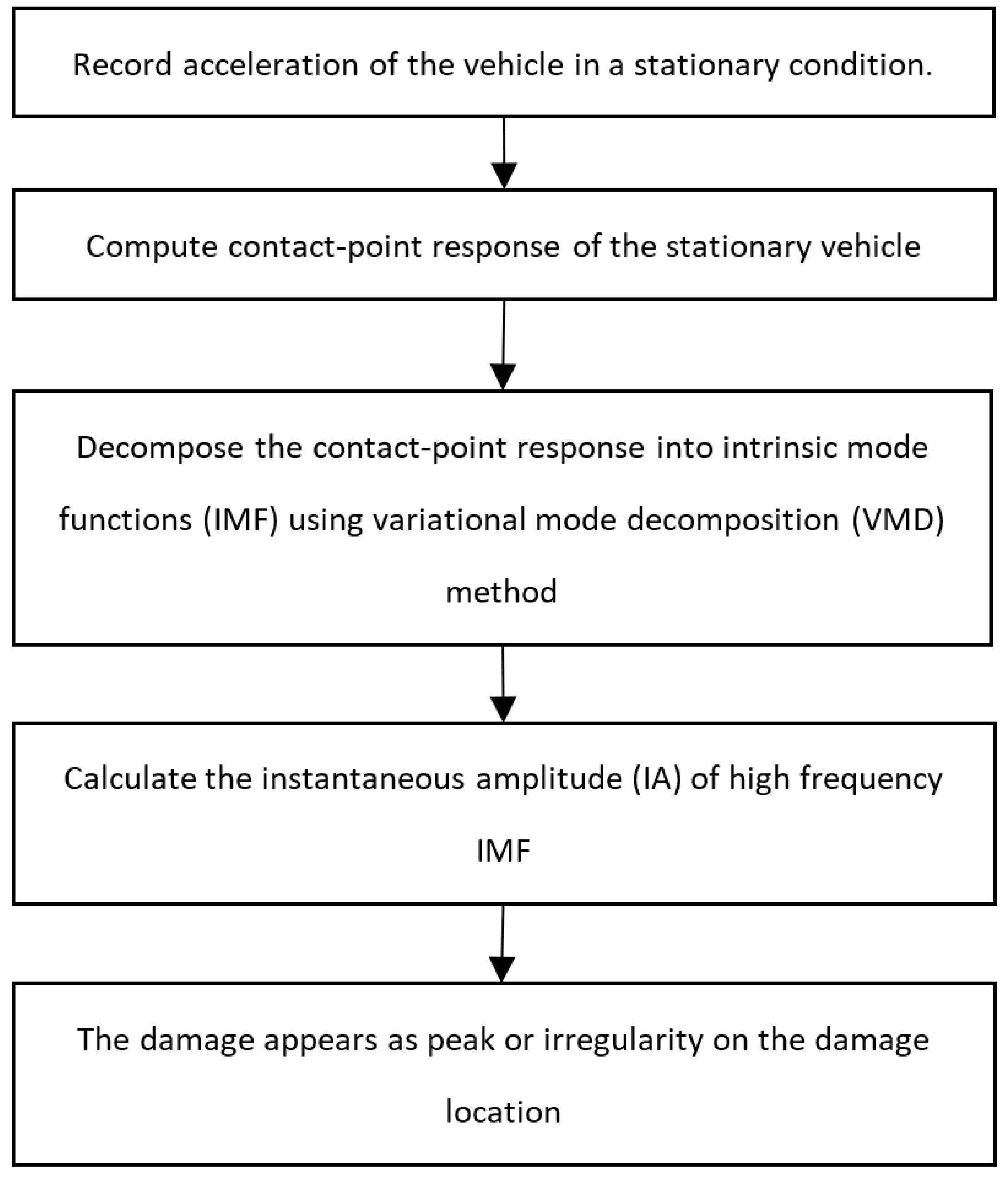
2. Damage Detection Using a Stationary Vehicle
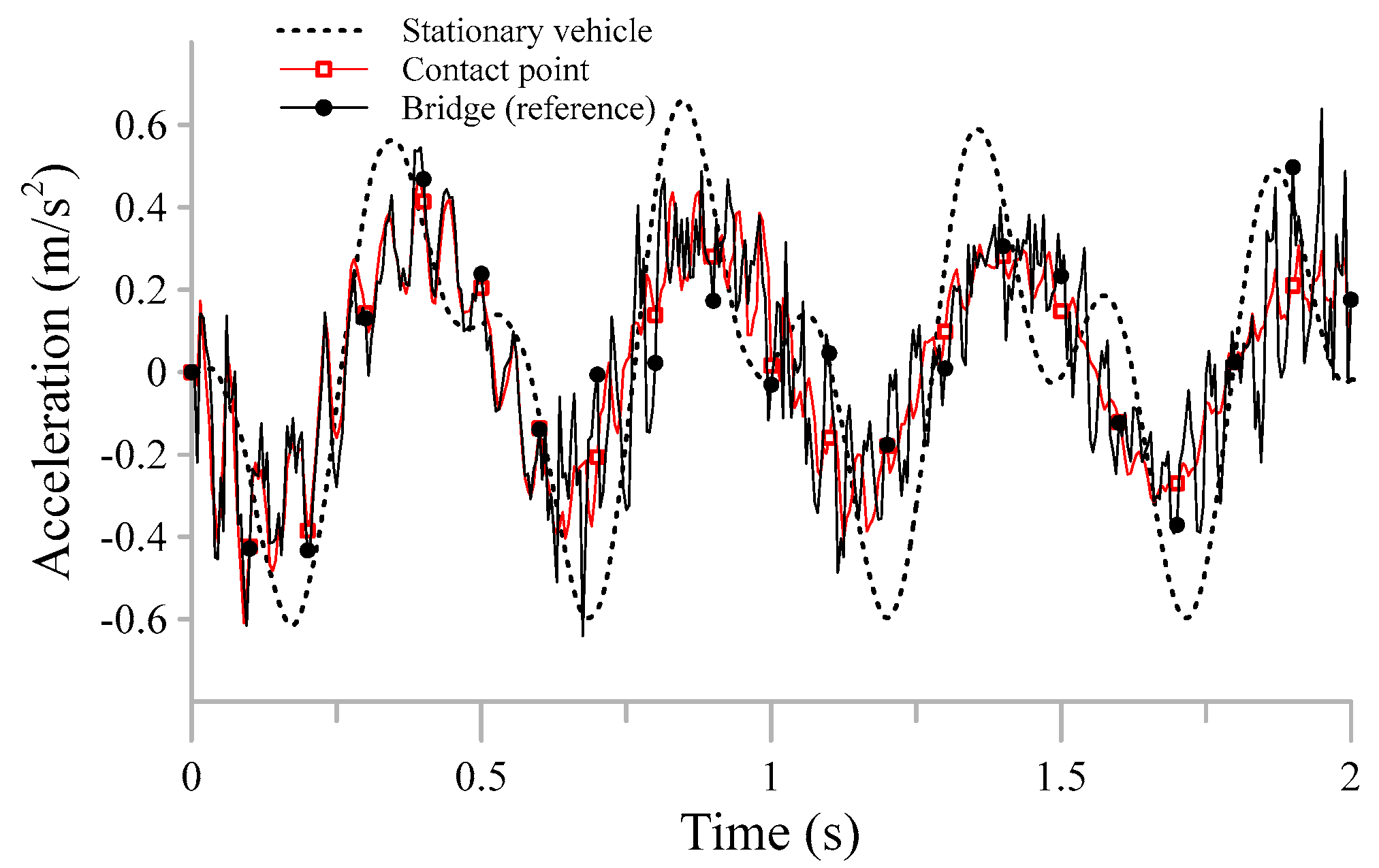
2.1. Contact-Point Response of the Stationary Vehicle
2.2. Decomposition of Contact-Point Response
2.3. Instantaneous Amplitude of High Frequency IMF
3. Finite Element Modulation and Damage Detection
3.1. Stationary Vehicle Location
3.2. Damped Vehicle
3.3. Multiple Damages
3.4. Smaller Damage
3.5. Moving Vehicle Speed
4. Conclusions
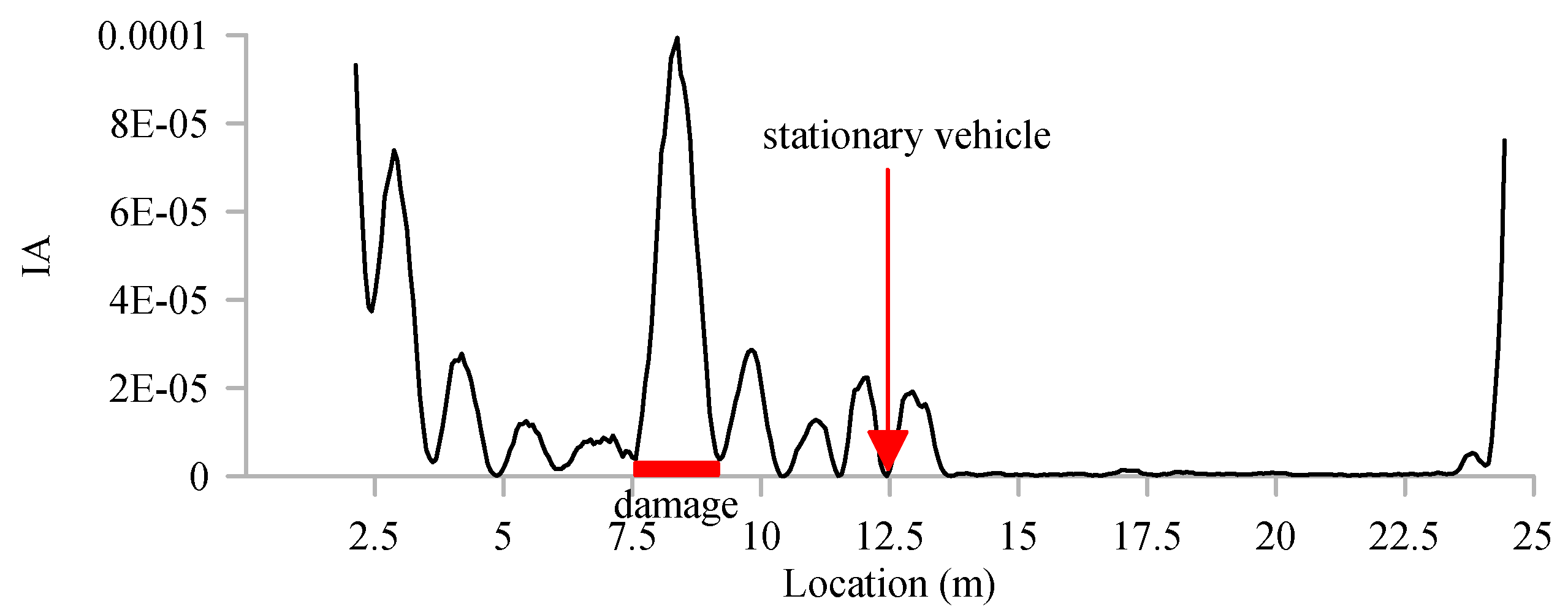
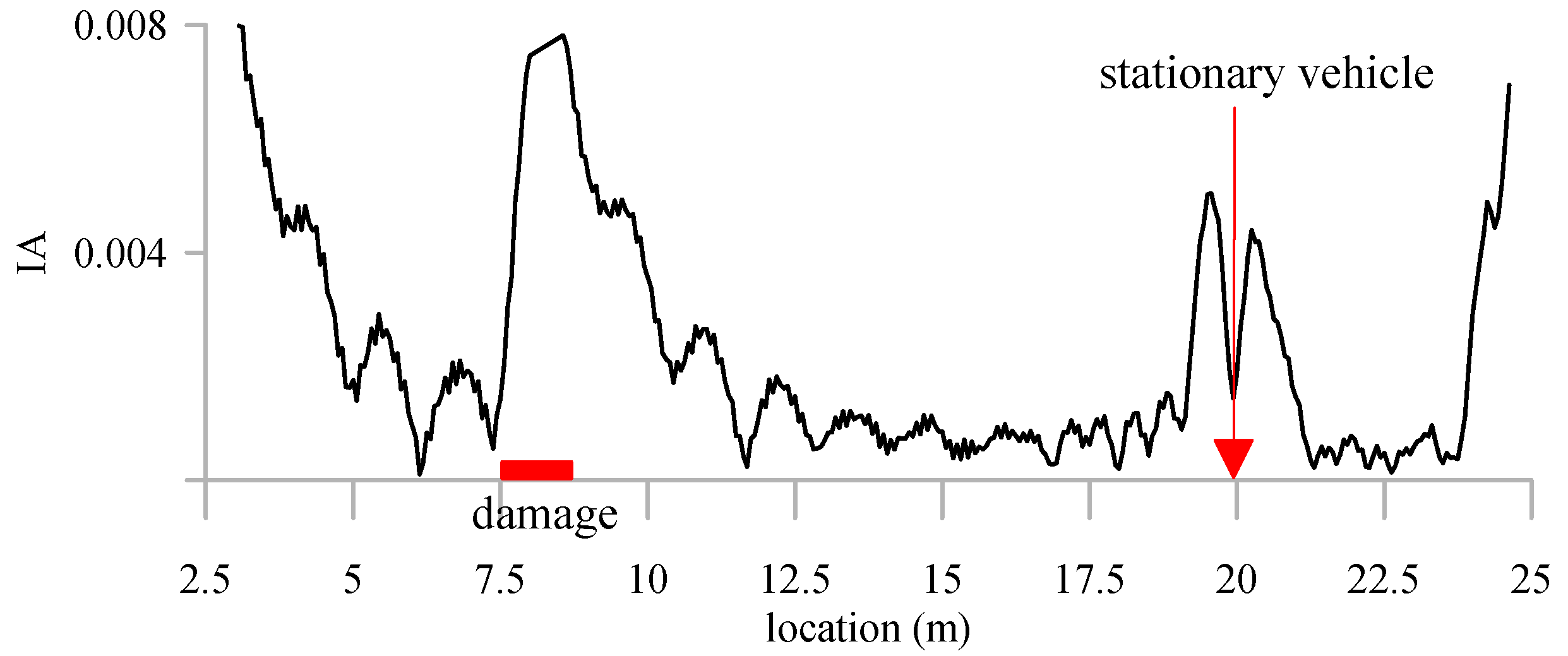
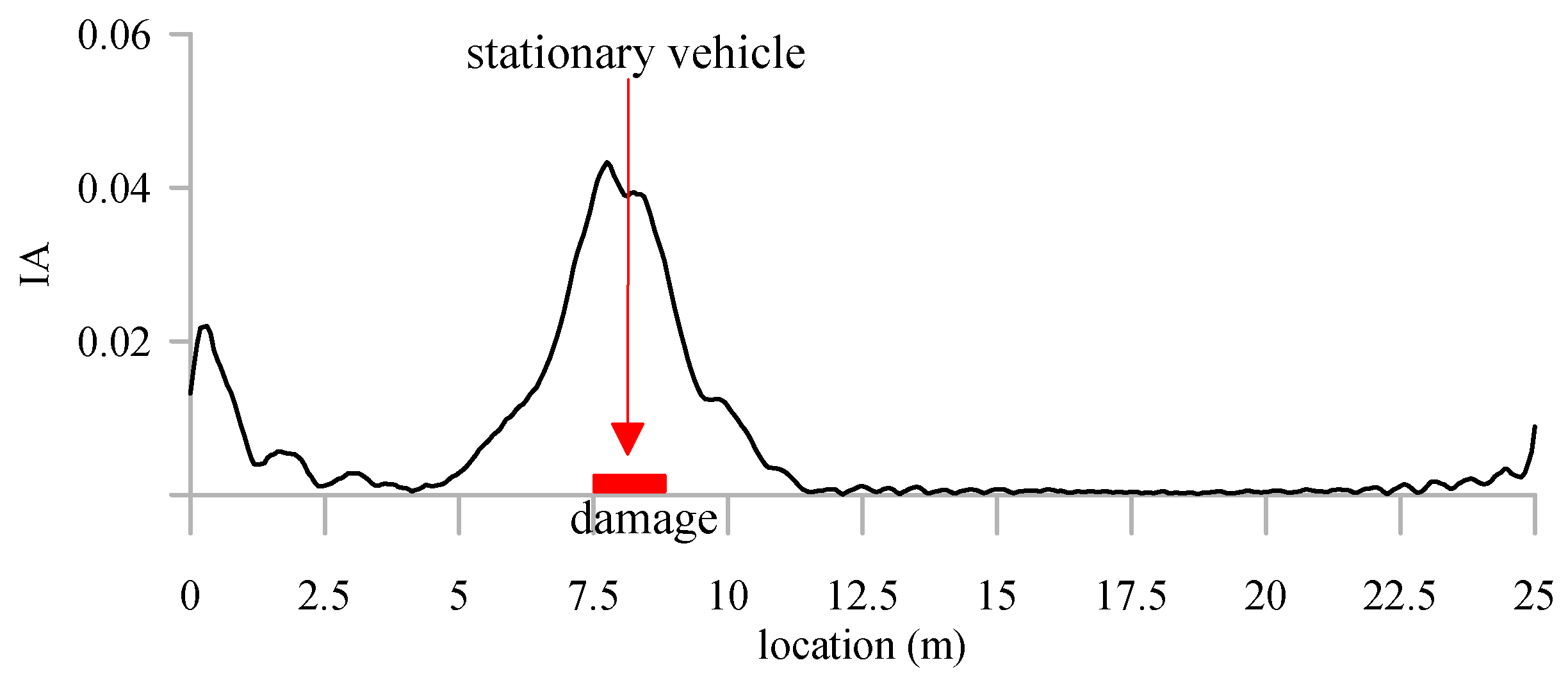
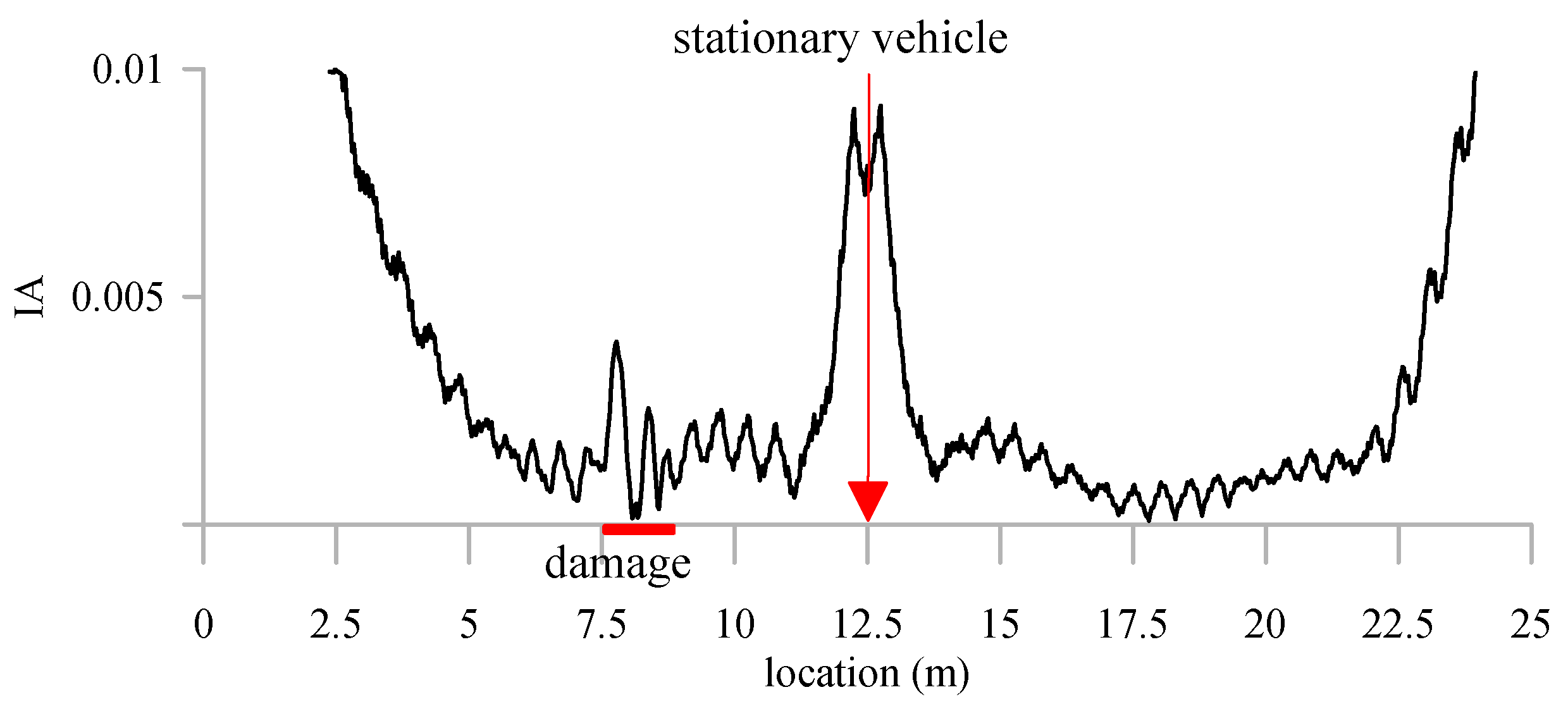
- Considering damage of 1 m in length (from 7.5 to 8.5 m away from the bridge beginning), zero damping of stationary vehicle located at mid-span, and speed of a moving vehicle of 12.5 m/s, the proposed method was able to detect the location of the damage accurately. When the location of the stationary vehicle was moved further away from the damage (20 m away from the bridge beginning), the IA also could show the peak at the correct location of the damage. After identifying the damage location from two positions of the stationary vehicle, the vehicle was stationed at the damage to investigate the response of the vehicle. In this case, only one peak of the IA appeared, and its amplitude was higher than that of the previous cases.
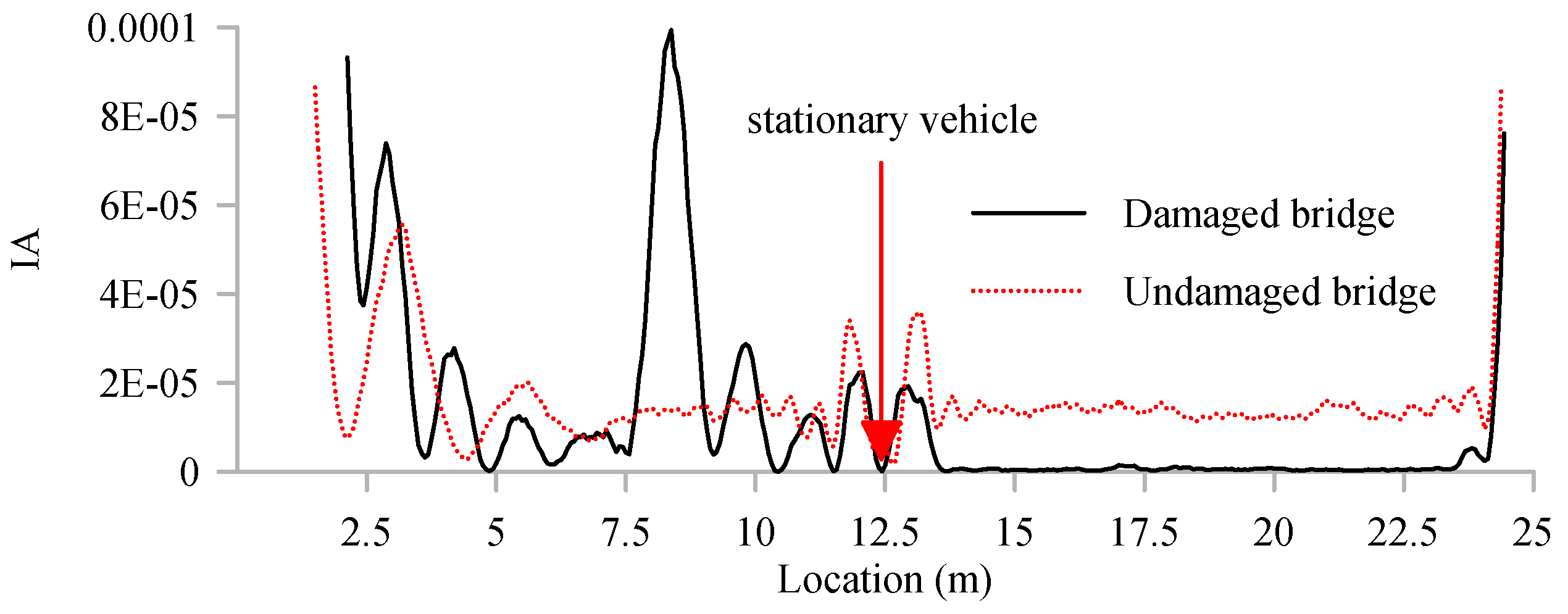
- When the IA of healthy and damaged bridge were compared, the irregularities at the bridge boundary remained similar; however, the peak that represents damage in the damaged bridge did not appear in the healthy bridge IA result. Irregularities at the boundaries do not represent damage and they occur due to the boundary condition of the bridge. Therefore, the method cannot detect damage near the boundaries of the bridge.
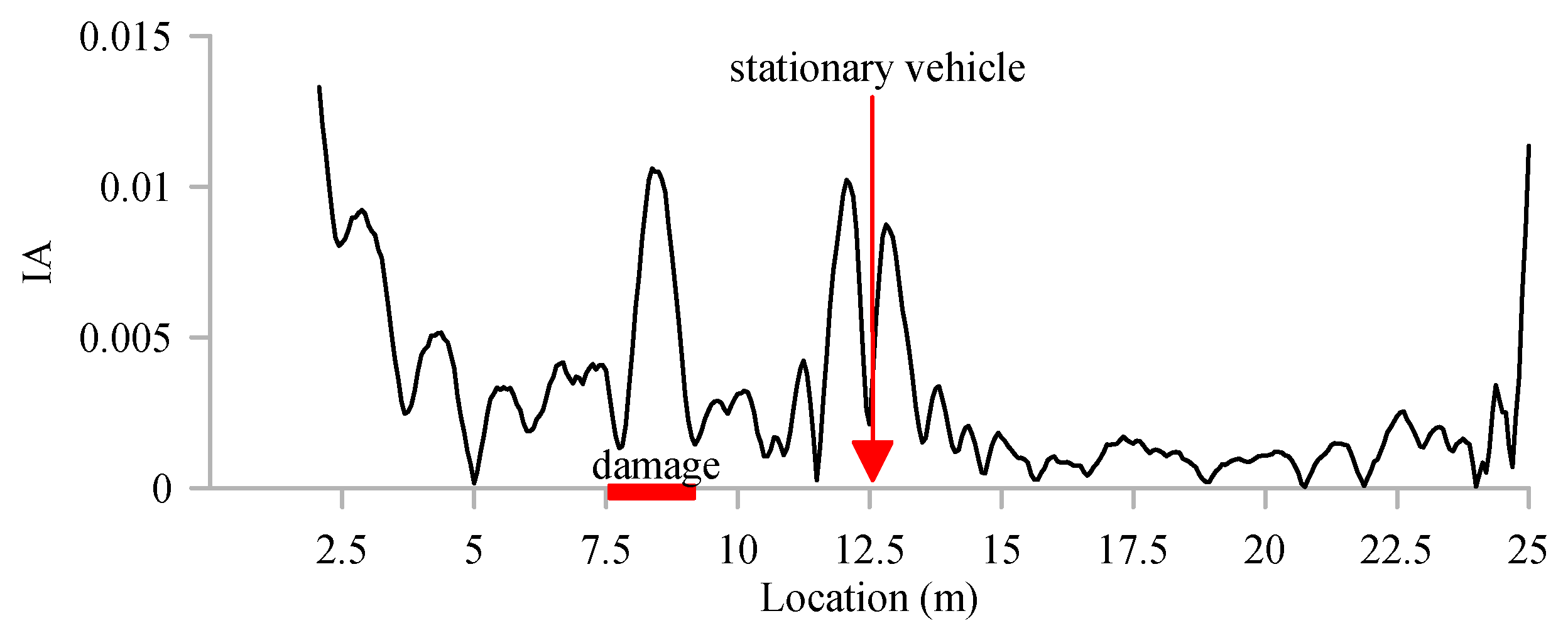
- When multiple damage was considered by adding another damage of 1 m (from 18.5 to 19.5 m) to the bridge, the proposed method could also detect the damage. Therefore, by considering the added mass of the stationary vehicle as a damage, the method could detect up to three points of damage on the bridge.
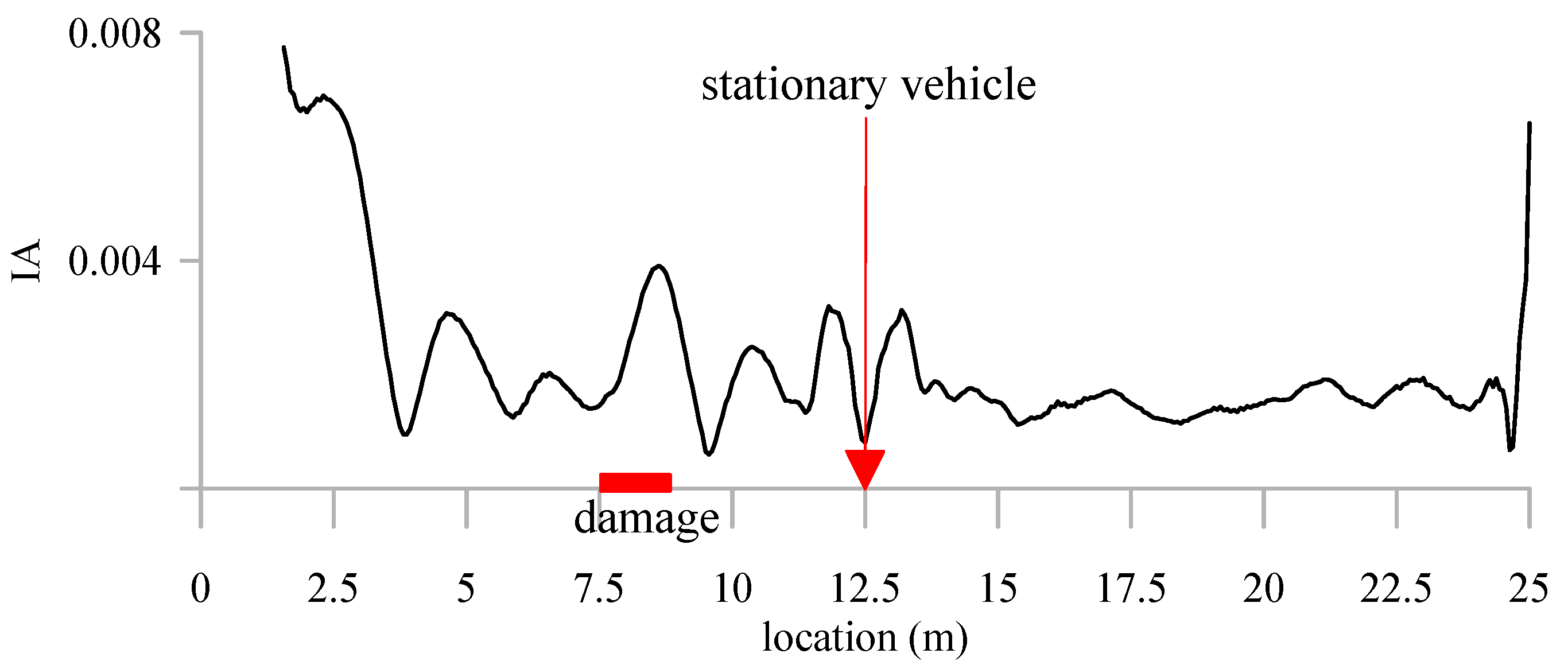
- When damping of 0.05 was added to the stationary vehicle, the vehicle was still able to detect the damage, but with less visibility. In addition, when the length of the single damage case was reduced to 0.5 m (from 8 to 8.5 m), the method could still detect the smaller damage, but with a lower visibility. Finally, when the speed of the moving vehicle was reduced to 5 m/s, lower visibility in the peak of IA was noticed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kim, C.W.; Chang, K.C.; McGetrick, P.J.; Inoue, S.; Hasegawa, S. Utilizing moving vehicles as sensors for bridge condition screening—A laboratory verification. Sens. Mater. 2017, 29, 153–163. [Google Scholar]
- Hajializadeh, D. Deep-Learning-Based Drive-by Damage Detection System for Railway Bridges. Infrastructures 2022, 7, 84. [Google Scholar] [CrossRef]
- Taha, M.M.R.; Noureldin, A.; Lucero, J.L.; Baca, T.J. Wavelet Transform for Structural Health Monitoring: A Compendium of Uses and Features. Struct. Health Monit. 2006, 5, 267–295. [Google Scholar] [CrossRef]
- Tan, C.; Elhattab, A.; Uddin, N. Wavelet-Entropy Approach for Detection of Bridge Damages Using Direct and Indirect Bridge Records. J. Infrastruct. Syst. 2020, 26, 04020037. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Lin, C.; Yau, J. Extracting bridge frequencies from the dynamic response of a passing vehicle. J. Sound Vib. 2004, 272, 471–493. [Google Scholar] [CrossRef]
- Lin, C.; Yang, Y.-B. Use of a passing vehicle to scan the fundamental bridge frequencies: An experimental verification. Eng. Struct. 2005, 27, 1865–1878. [Google Scholar] [CrossRef]
- Malekjafarian, A.; McGetrick, P.J.; Obrien, E.J. A Review of Indirect Bridge Monitoring Using Passing Vehicles. Shock Vib. 2015, 2015, 286139. [Google Scholar] [CrossRef]
- Malekjafarian, A.; Corbally, R.; Gong, W. A review of mobile sensing of bridges using moving vehicles: Progress to date, challenges and future trends. Structures 2022, 44, 1466–1489. [Google Scholar] [CrossRef]
- Yang, Y.B.; Yang, J.P. State-of-the-Art Review on Modal Identification and Damage Detection of Bridges by Moving Test Vehicles. Int. J. Struct. Stab. Dyn. 2018, 18, 1850025. [Google Scholar] [CrossRef]
- Kobayashi, Y.; Sugiura, K.; Yamaguchi, T.; Oshima, Y. Eigenfrequency estimation for bridges using the response of a passing vehicle with excitation system. In Proceedings of the Fourth International Conference on Bridge Maintenance, Safety and Management, Seoul, Korea, 13–17 July 2008. [Google Scholar] [CrossRef]
- Yang, Y.; Chang, K.-C. Extraction of bridge frequencies from the dynamic response of a passing vehicle enhanced by the EMD technique. J. Sound Vib. 2009, 322, 718–739. [Google Scholar] [CrossRef]
- González, A.; O’Brien, E.J.; Li, Y.-Y.; Cashell, K. The use of vehicle acceleration measurements to estimate road roughness. Veh. Syst. Dyn. 2008, 46, 483–499. [Google Scholar] [CrossRef]
- Kim, C.-W.; Isemoto, R.; Toshinami, T.; Kawatani, M.; McGetrick, P.; O’Brien, E.J. Experimental investigation of drive-by bridge inspection. In Proceedings of the 5th International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII-5), Cancun, Mexico, 11–15 December 2011; Instituto de Ingeniería, UNAM: Mexico City, Mexico, 2011. [Google Scholar]
- Siringoringo, D.M.; Fujino, Y. Estimating bridge fundamental frequency from vibration response of instrumented passing vehicle: Analytical and experimental study. Adv. Struct. Eng. 2012, 15, 417–433. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Chang, K. Effect of road surface roughness on the response of a moving vehicle for identification of bridge frequencies. Interact. Multiscale Mech. 2012, 5, 347–368. [Google Scholar] [CrossRef]
- Zhang, C.; Mousavi, A.A.; Masri, S.F.; Gholipour, G.; Yan, K.; Li, X. Vibration feature extraction using signal processing techniques for structural health monitoring: A review. Mech. Syst. Signal Process. 2022, 177, 109175. [Google Scholar] [CrossRef]
- Yang, Y.B.; Li, Y.C.; Chang, K.C. Using two connected vehicles to measure the frequencies of bridges with rough surface: A theoretical study. Acta Mech. 2012, 223, 1851–1861. [Google Scholar] [CrossRef]
- Malekjafarian, A.; O’Brien, E.J. Application of output-only modal method in monitoring of bridges using an instrumented vehicle. In Proceedings of the Civil Engineering Research in Ireland, Belfast, UK, 28–29 August 2014. [Google Scholar]
- Yang, Y.B.; Zhang, B.; Qian, Y.; Wu, Y. Contact-Point Response for Modal Identification of Bridges by a Moving Test Vehicle. Int. J. Struct. Stab. Dyn. 2018, 18, 1850073. [Google Scholar] [CrossRef]
- Yang, Y.; Xu, H.; Zhang, B.; Xiong, F.; Wang, Z. Measuring bridge frequencies by a test vehicle in non-moving and moving states. Eng. Struct. 2020, 203, 109859. [Google Scholar] [CrossRef]
- Hashlamon, I.; Nikbakht, E.; Topa, A.; Elhattab, A. Numerical Parametric Study on the Effectiveness of the Contact-Point Response of a Stationary Vehicle for Bridge Health Monitoring. Appl. Sci. 2021, 11, 7028. [Google Scholar] [CrossRef]
- Hashlamon, I.; Nikbakht, E.; Topa, A. Indirect Bridge Health Monitoring Employing Contact-Point Response of Instrumented Stationary Vehicle. In Proceedings of the International Conference on Civil, Offshore and Environmental Engineering, Dubai, United Arab Emirates, 20–21 December 2021; Springer: Berlin/Heidelberg, Germany, 2021. [Google Scholar] [CrossRef]
- Carden, E.P.; Fanning, P. Vibration Based Condition Monitoring: A Review. Struct. Health Monit. 2004, 3, 355–377. [Google Scholar] [CrossRef]
- Corbally, R.; Malekjafarian, A. Examining changes in bridge frequency due to damage using the contact-point response of a passing vehicle. J. Struct. Integr. Maint. 2021, 6, 148–158. [Google Scholar] [CrossRef]
- Singh, P.; Sadhu, A. A hybrid time-frequency method for robust drive-by modal identification of bridges. Eng. Struct. 2022, 266, 114624. [Google Scholar] [CrossRef]
- ElHattab, A.; Uddin, N.; Obrien, E. Drive-by bridge damage detection using non-specialized instrumented vehicle. Bridg. Struct. 2017, 12, 73–84. [Google Scholar] [CrossRef]
- Janeliukstis, R.; Ručevskis, S.; Wesolowski, M.; Chate, A. Multiple Damage Identification in Beam Structure Based on Wavelet Transform. Procedia Eng. 2017, 172, 426–432. [Google Scholar] [CrossRef]
- Bandara, S.; Rajeev, P.; Gad, E.; Sriskantharajah, B.; Flatley, I. Damage detection of in service timber poles using Hilbert-Huang transform. NDT E Int. 2019, 107, 102141. [Google Scholar] [CrossRef]
- Kim, C.; Isemoto, R.; McGetrick, P.; Kawatani, M.; Obrien, E. Drive-by bridge inspection from three different approaches. Smart Struct. Syst. 2014, 13, 775–796. [Google Scholar] [CrossRef]
- Zhu, X.; Cao, M.; Ostachowicz, W.; Xu, W. Damage Identification in Bridges by Processing Dynamic Responses to Moving Loads: Features and Evaluation. Sensors 2019, 19, 463. [Google Scholar] [CrossRef]
- Mousavi, M.; Holloway, D.; Olivier, J.; Gandomi, A.H. Beam damage detection using synchronisation of peaks in instantaneous frequency and amplitude of vibration data. Measurement 2021, 168, 108297. [Google Scholar] [CrossRef]
- McGetrick, P.J.; Kim, C.W. A Parametric Study of a Drive by Bridge Inspection System Based on the Morlet Wavelet. Key Eng. Mater. 2013, 569–570, 262–269. [Google Scholar] [CrossRef]
- Hester, D.; Gonzalez, A. A discussion on the merits and limitations of using drive-by monitoring to detect localised damage in a bridge. Mech. Syst. Signal Process. 2017, 90, 234–253. [Google Scholar] [CrossRef]
- Fitzgerald, P.; Malekjafarian, A.; Cantero, D.; Obrien, E.J.; Prendergast, L.J. Drive-by scour monitoring of railway bridges using a wavelet-based approach. Eng. Struct. 2019, 191, 1–11. [Google Scholar] [CrossRef]
- Obrien, E.J.; Malekjafarian, A.; González, A. Application of empirical mode decomposition to drive-by bridge damage detection. Eur. J. Mech.—A/Solids 2017, 61, 151–163. [Google Scholar] [CrossRef]
- Kildashti, K.; Alamdari, M.M.; Kim, C.W.; Gao, W.; Samali, B. Drive-by-bridge inspection for damage identification in a cable-stayed bridge: Numerical investigations. Eng. Struct. 2020, 223, 110891. [Google Scholar] [CrossRef]
- Zhang, B.; Qian, Y.; Wu, Y.; Yang, Y. An effective means for damage detection of bridges using the contact-point response of a moving test vehicle. J. Sound Vib. 2018, 419, 158–172. [Google Scholar] [CrossRef]
- Yang, Y.-B.; Zhang, B.; Qian, Y.; Wu, Y. Further Revelation on Damage Detection by IAS Computed from the Contact-Point Response of a Moving Vehicle. Int. J. Struct. Stab. Dyn. 2018, 18, 1850137. [Google Scholar] [CrossRef]
- Zhan, Y.; Au, F.T.K.; Zhang, J. Bridge identification and damage detection using contact point response difference of moving vehicle. Struct. Control Health Monit. 2021, 28, e2837. [Google Scholar] [CrossRef]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Roveri, N.; Carcaterra, A. Damage detection in structures under traveling loads by Hilbert–Huang transform. Mech. Syst. Signal Process. 2012, 28, 128–144. [Google Scholar] [CrossRef]
- Cheraghi, N.; Taheri, F. A damage index for structural health monitoring based on the empirical mode decomposition. J. Mech. Mater. Struct. 2007, 2, 43–61. [Google Scholar] [CrossRef]
- Meredith, J.; González, A.; Hester, D. Empirical mode decomposition of the acceleration response of a prismatic beam subject to a moving load to identify multiple damage locations. Shock Vib. 2012, 19, 845–856. [Google Scholar] [CrossRef]
- Dragomiretskiy, K.; Zosso, D. Variational mode decomposition. IEEE Trans. Signal Process. 2013, 62, 531–544. [Google Scholar] [CrossRef]
- ISO 8608; Mechanical Vibration–Road Surface Profiles–Reporting of Measured Data. ISO: London, UK, 2016.
- He, W.-Y.; Ren, W.-X. Structural damage detection using a parked vehicle induced frequency variation. Eng. Struct. 2018, 170, 34–41. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Property | Value |
|---|---|
| Bridge length | 25 m |
| Elastic modulus | 27.5 GN/m2 |
| Moment of inertia | 0.12 m4 |
| Bridge length density | 4800 kg/m |
| Property | Value |
|---|---|
| Stationary vehicle body mass | 200 kg |
| Stationary vehicle spring stiffness | 1.2 × 105 N/m |
| Stationary vehicle frequency | 3.98 Hz |
| Moving vehicle body mass | 14,000 kg |
| Moving vehicle axle mass | 1000 kg |
| Moving vehicle body stiffness | 1.2 × 105 N/m |
| Moving vehicle axle stiffness | 2000 N/m |
| Moving vehicle body damping | 5% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hashlamon, I.; Nikbakht, E. The Use of a Movable Vehicle in a Stationary Condition for Indirect Bridge Damage Detection Using Baseline-Free Methodology. Appl. Sci. 2022, 12, 11625. https://doi.org/10.3390/app122211625
Hashlamon I, Nikbakht E. The Use of a Movable Vehicle in a Stationary Condition for Indirect Bridge Damage Detection Using Baseline-Free Methodology. Applied Sciences. 2022; 12(22):11625. https://doi.org/10.3390/app122211625
Chicago/Turabian StyleHashlamon, Ibrahim, and Ehsan Nikbakht. 2022. "The Use of a Movable Vehicle in a Stationary Condition for Indirect Bridge Damage Detection Using Baseline-Free Methodology" Applied Sciences 12, no. 22: 11625. https://doi.org/10.3390/app122211625
APA StyleHashlamon, I., & Nikbakht, E. (2022). The Use of a Movable Vehicle in a Stationary Condition for Indirect Bridge Damage Detection Using Baseline-Free Methodology. Applied Sciences, 12(22), 11625. https://doi.org/10.3390/app122211625