

Model-Free Adaptive Control Based on Fractional Input-Output Data Model


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Problem Formulation
3. Fractional Input-Output Equivalent Model
- ∘ Rule :
- {IF is and is THEN },
- x is POSITIVE: ;
- x is ZERO: ; and
- x is NEGATIVE,
4. Adaptive Controller
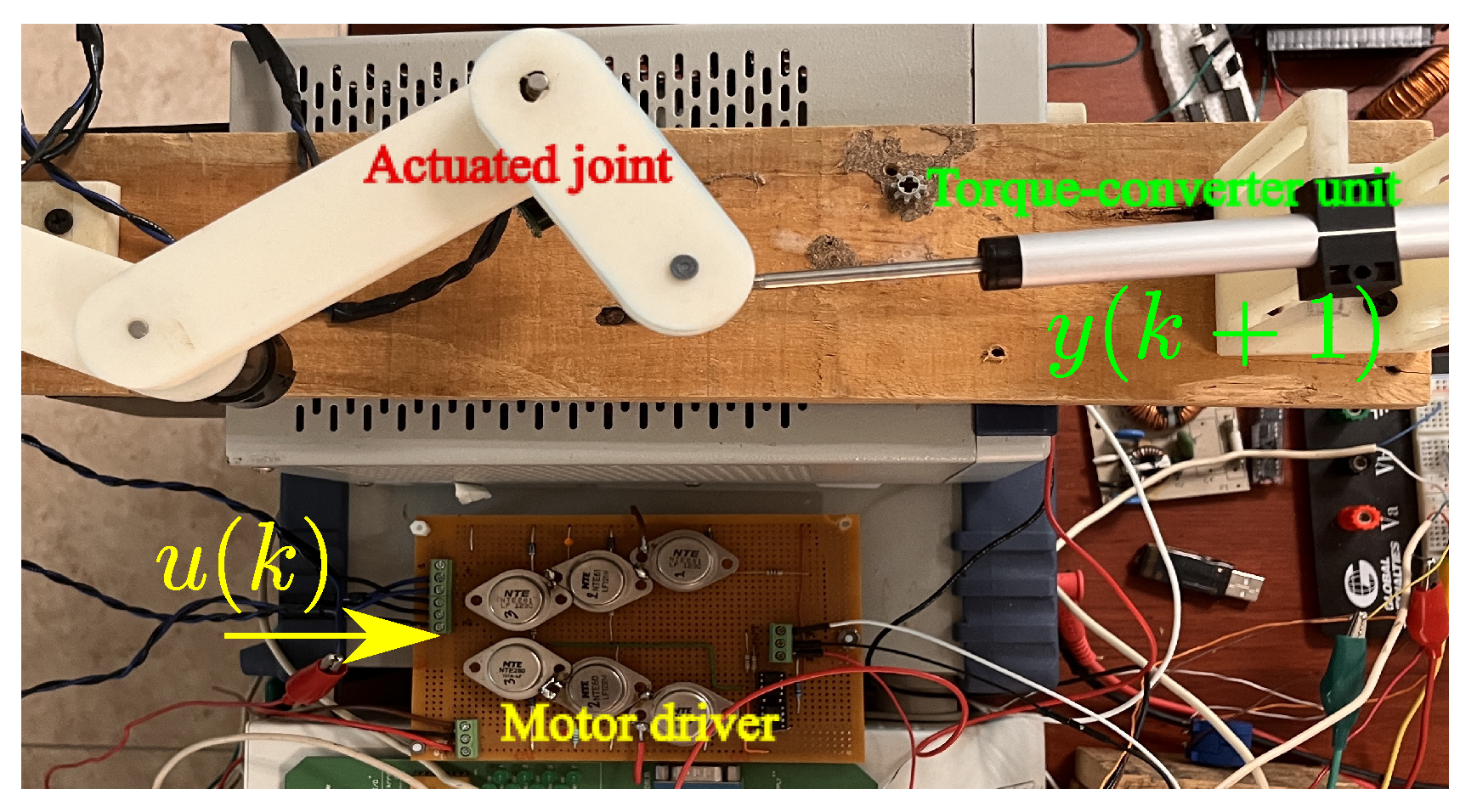
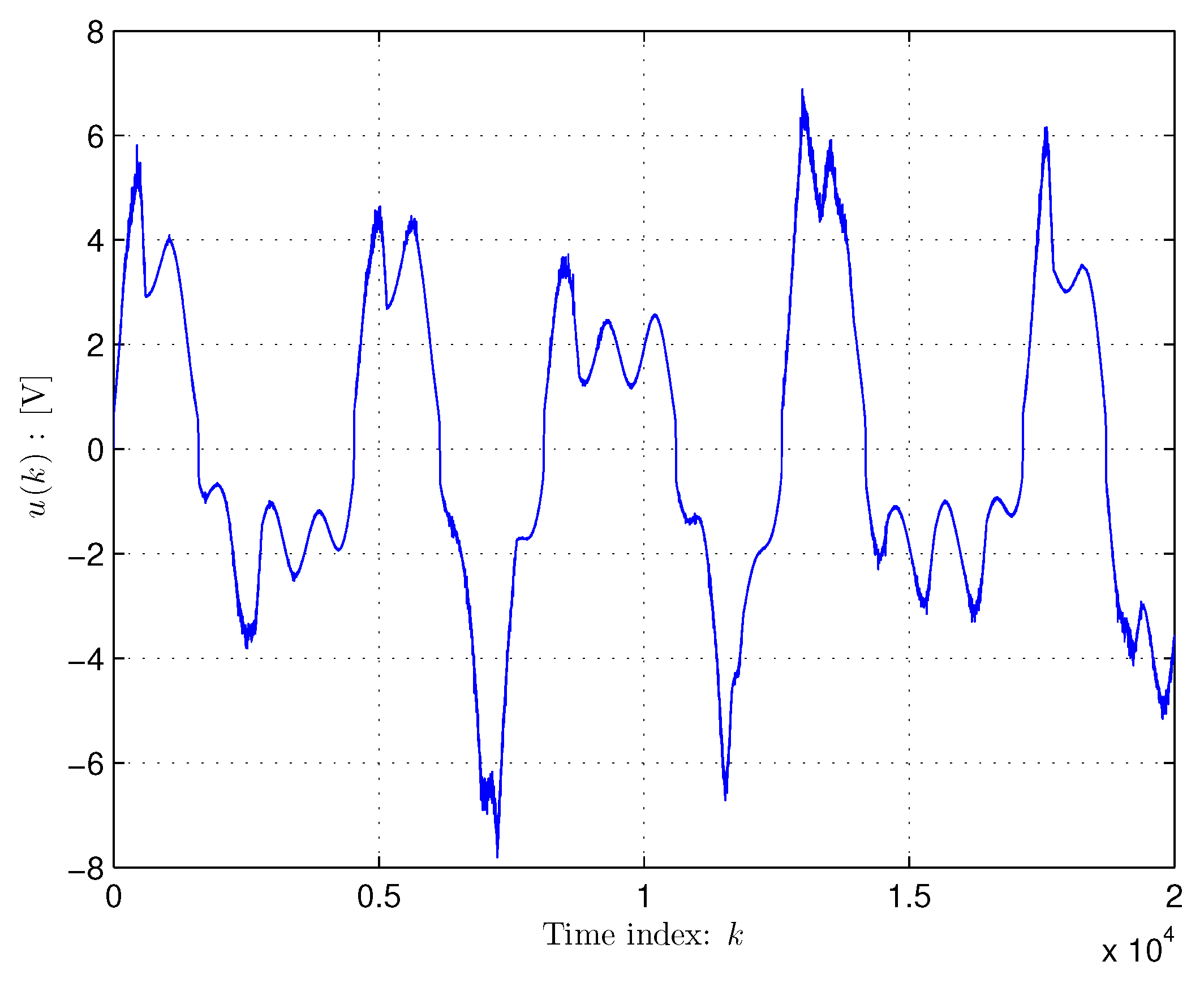
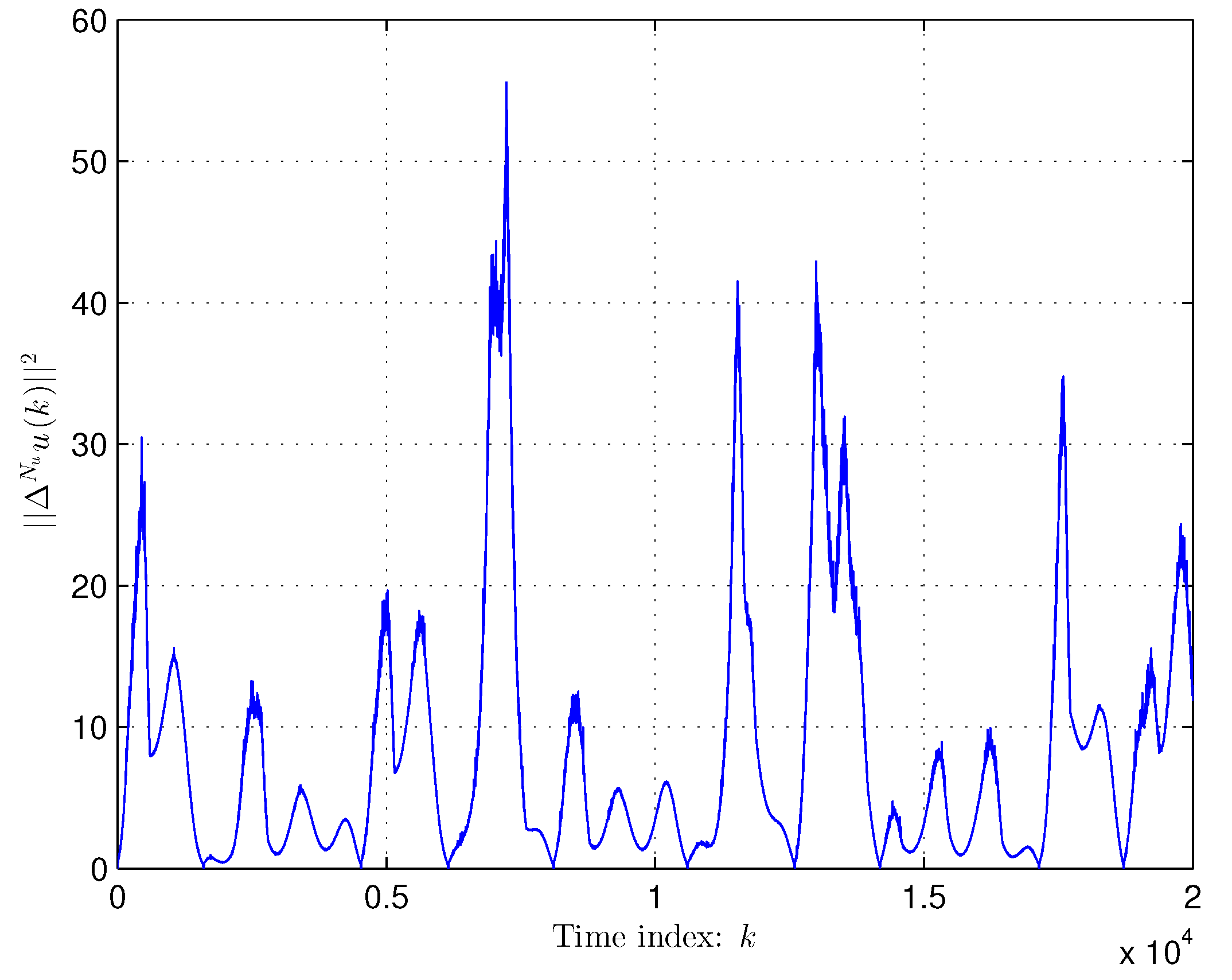
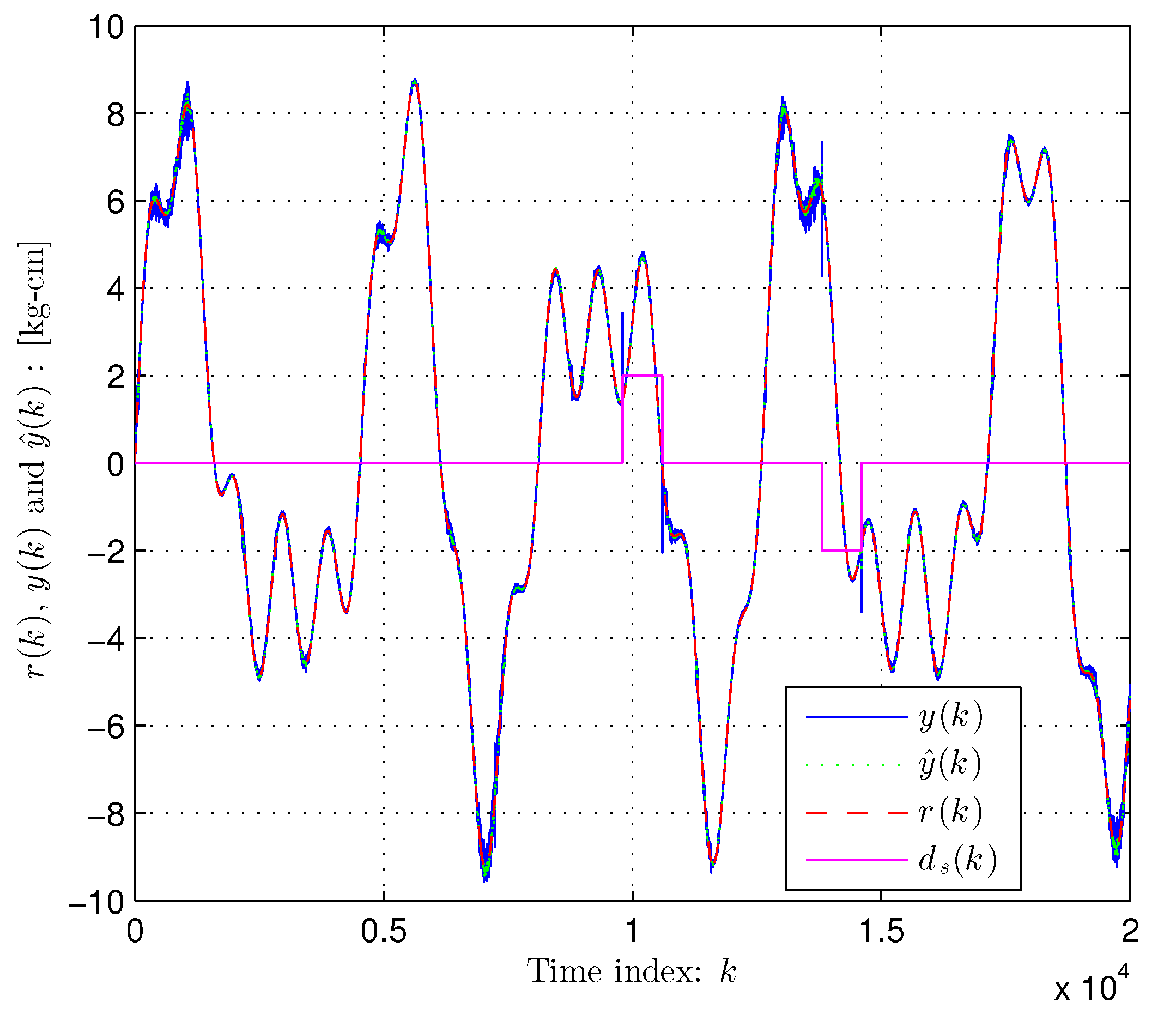
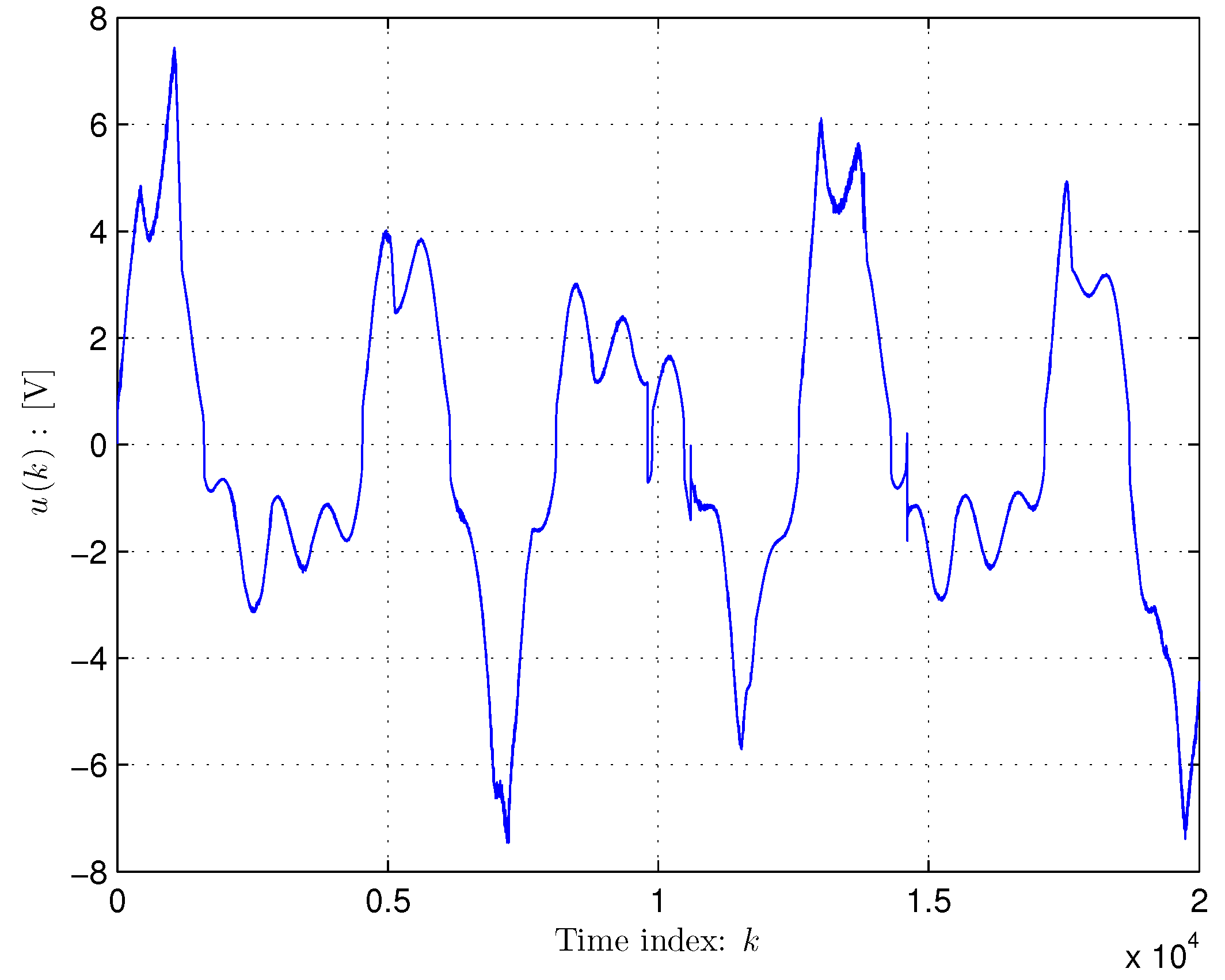
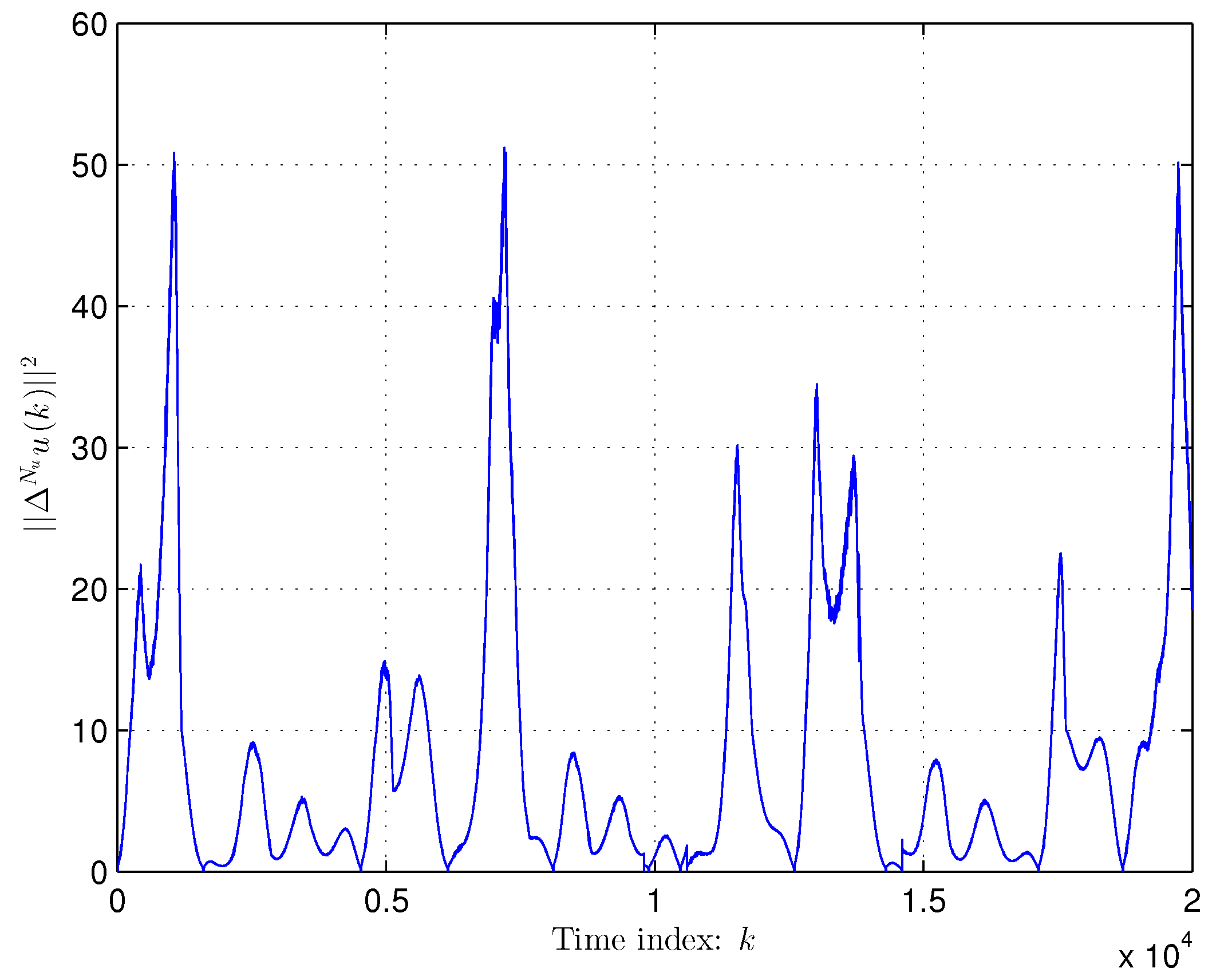
5. Experimental System and Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hou, Z.; Jin, S. Data-driven model-free adaptive control for a class of MIMO nonlinear discrete-time systems. IEEE Trans. Neural Netw. 2011, 22, 2173–2188. [Google Scholar]
- Podlubny, I. Fractional Differential Equations: An Introduction to Fractional Derivatives, Fractional Differential Equations, to Methods of Their Solution and Some of Their Applications; Elsevier: Amsterdam, The Netherlands, 1998. [Google Scholar]
- Stanisławski, R.; Latawiec, K.J. Normalized finite fractional differences: Computational and accuracy breakthroughs. Int. J. Appl. Math. Comput. Sci. 2012, 22, 907–919. [Google Scholar] [CrossRef]
- Singh, A.K.; Mehra, M. Wavelet collocation method based on Legendre polynomials and its application in solving the stochastic fractional integro-differential equations. J. Comput. Sci. 2021, 51, 101342. [Google Scholar] [CrossRef]
- Xu, C.; Mu, D.; Pan, Y.; Aouiti, C.; Pang, Y.; Yao, L. Probing into bifurcation for fractional-order BAM neural networks concerning multiple time delays. J. Comput. Sci. 2022, 62, 101701. [Google Scholar] [CrossRef]
- Yin, S.; Li, X.; Gao, H.; Kaynak, O. Data-based techniques focused on modern industry: An overview. IEEE Trans. Ind. Electron. 2014, 62, 657–667. [Google Scholar] [CrossRef]
- Abouaïssa, H.; Chouraqui, S. On the control of robot manipulator: A model-free approach. J. Comput. Sci. 2019, 31, 6–16. [Google Scholar] [CrossRef]
- Treesatayapun, C.; Muñoz-Vázquez, A.J. Discrete-time data-driven disturbance-observer control based on fuzzy rules emulating networks. J. Comput. Sci. 2021, 54, 101426. [Google Scholar] [CrossRef]
- Hou, Z.; Jin, S. A novel data-driven control approach for a class of discrete-time nonlinear systems. IEEE Trans. Control Syst. Technol. 2010, 19, 1549–1558. [Google Scholar] [CrossRef]
- Svetozarevic, B.; Baumann, C.; Muntwiler, S.; Di Natale, L.; Zeilinger, M.N.; Heer, P. Data-driven control of room temperature and bidirectional EV charging using deep reinforcement learning: Simulations and experiments. Appl. Energy 2022, 307, 118127. [Google Scholar] [CrossRef]
- Sivaraj, S.; Rajendran, S.; Prasad, L.P. Data driven control based on Deep Q-Network algorithm for heading control and path following of a ship in calm water and waves. Ocean Eng. 2022, 259, 111802. [Google Scholar] [CrossRef]
- Prag, K.; Woolway, M.; Celik, T. Towards Data-driven Optimal Control: A Systematic Review of the Landscape. IEEE Access 2022, 10, 32190–32212. [Google Scholar] [CrossRef]
- Jiang, K.; Yan, F.; Zhang, H. Data-driven control of automotive diesel engines and after-treatment systems: State of the art and future challenges. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022. [Google Scholar] [CrossRef]
- Baggio, G.; Bassett, D.S.; Pasqualetti, F. Data-driven control of complex networks. Nat. Commun. 2021, 12, 1429. [Google Scholar] [CrossRef] [PubMed]
- Treesatayapun, C. A data-driven adaptive controller for a class of unknown nonlinear discrete-time systems with estimated PPD. Eng. Sci. Technol. Int. J. 2015, 18, 218–228. [Google Scholar] [CrossRef]
- Li, Y.; Hou, Z.; Liu, X. Full Form Dynamic Linearization based data-driven MFAC for a class of discrete-time nonlinear systems. In Proceedings of the 2011 Chinese Control and Decision Conference (CCDC), Mianyang, China, 23–25 May 2011; pp. 127–132. [Google Scholar]
- Hou, Z.; Zhu, Y. Controller-dynamic-linearization-based model free adaptive control for discrete-time nonlinear systems. IEEE Trans. Ind. Inform. 2013, 9, 2301–2309. [Google Scholar] [CrossRef]
- Datta, A.; Ho, M.T.; Bhattacharyya, S.P. Structure and Synthesis of PID Controllers; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1999. [Google Scholar]
- Jeng, J.C. A model-free direct synthesis method for PI/PID controller design based on disturbance rejection. Chemom. Intell. Lab. Syst. 2015, 147, 14–29. [Google Scholar] [CrossRef]
- Parra-Vega, V.; Arimoto, S.; Liu, Y.H.; Hirzinger, G.; Akella, P. Dynamic sliding PID control for tracking of robot manipulators: Theory and experiments. IEEE Trans. Robot. Autom. 2003, 19, 967–976. [Google Scholar] [CrossRef]
- Eker, I. Sliding mode control with PID sliding surface and experimental application to an electromechanical plant. ISA Trans. 2006, 45, 109–118. [Google Scholar] [CrossRef]
- Vinagre, B.M.; Monje, C.A.; Calderón, A.J.; Suárez, J.I. Fractional PID controllers for industry application. A brief introduction. J. Vib. Control 2007, 13, 1419–1429. [Google Scholar] [CrossRef]
- Kumar, V.; Nakra, B.; Mittal, A. A review on classical and fuzzy PID controllers. Int. J. Intell. Control Syst. 2011, 16, 170–181. [Google Scholar]
- Esfandyari, M.; Fanaei, M.A.; Zohreie, H. Adaptive fuzzy tuning of PID controllers. Neural Comput. Appl. 2013, 23, 19–28. [Google Scholar] [CrossRef]
- Ortigueira, M.D. Fractional discrete-time linear systems. In Proceedings of the 1997 IEEE International Conference on Acoustics, Speech, and Signal Processing, Munich, Germany, 21–24 April 1997; pp. 2241–2244. [Google Scholar]
- Machado, J. Discrete-time fractional-order controllers. Fract. Calc. Appl. Anal. 2001, 4, 47–66. [Google Scholar]
- Liu, Q.; Li, D.; Ge, S.S.; Ji, R.; Ouyang, Z.; Tee, K.P. Adaptive bias RBF neural network control for a robotic manipulator. Neurocomputing 2021, 447, 213–223. [Google Scholar] [CrossRef]
- Sun, Y.; Xu, J.; Lin, G.; Ji, W.; Wang, L. RBF neural network-based supervisor control for maglev vehicles on an elastic track with network time delay. IEEE Trans. Ind. Inform. 2020, 18, 509–519. [Google Scholar] [CrossRef]
- Vu, D.T.; Nguyen, N.K.; Semail, E.; Wu, H. Adaline-Based Control Schemes for Non-Sinusoidal Multiphase Drives–Part I: Torque Optimization for Healthy Mode. Energies 2021, 14, 8302. [Google Scholar] [CrossRef]
- Hou, Y.; Xue, L.; Li, S.; Xing, J. User-experience-oriented fuzzy logic controller for adaptive streaming. Comput. J. 2018, 61, 1064–1074. [Google Scholar] [CrossRef]
- García-Martínez, J.R.; Cruz-Miguel, E.E.; Carrillo-Serrano, R.V.; Mendoza-Mondragón, F.; Toledano-Ayala, M.; Rodríguez-Reséndiz, J. A PID-type fuzzy logic controller-based approach for motion control applications. Sensors 2020, 20, 5323. [Google Scholar] [CrossRef]
- Treesatayapun, C. Prescribed performance of discrete-time controller based on the dynamic equivalent data model. Appl. Math. Model. 2020, 78, 366–382. [Google Scholar] [CrossRef]








Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Treestayapun, C.; Muñoz-Vázquez, A.J. Model-Free Adaptive Control Based on Fractional Input-Output Data Model. Appl. Sci. 2022, 12, 11168. https://doi.org/10.3390/app122111168
Treestayapun C, Muñoz-Vázquez AJ. Model-Free Adaptive Control Based on Fractional Input-Output Data Model. Applied Sciences. 2022; 12(21):11168. https://doi.org/10.3390/app122111168
Chicago/Turabian StyleTreestayapun, Chidentree, and Aldo Jonathan Muñoz-Vázquez. 2022. "Model-Free Adaptive Control Based on Fractional Input-Output Data Model" Applied Sciences 12, no. 21: 11168. https://doi.org/10.3390/app122111168
APA StyleTreestayapun, C., & Muñoz-Vázquez, A. J. (2022). Model-Free Adaptive Control Based on Fractional Input-Output Data Model. Applied Sciences, 12(21), 11168. https://doi.org/10.3390/app122111168