
Sparse Plane Wave Approximation of Acoustic Modes to Address Basis Mismatch


Abstract
:1. Introduction
2. PW Approximation of Acoustic Modes
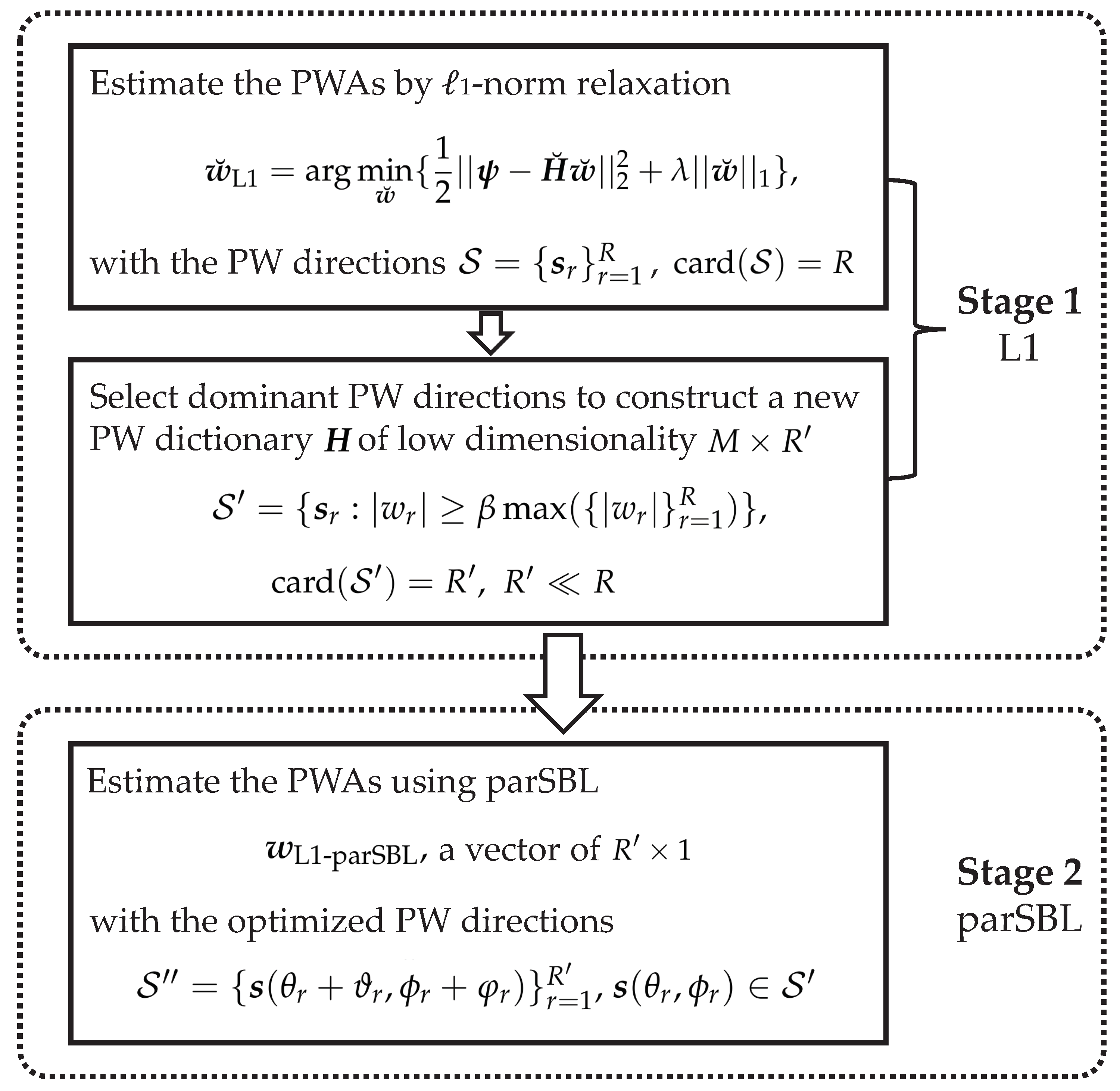
3. Proposed Combined Two-Stage Method
3.1. Stage 1: Selection of Dominant PW Directions Using -Norm Relaxation
3.2. Stage 2: Estimation of PWAs and Directions Using Parametric SBL
3.2.1. Parameterized Dictionary
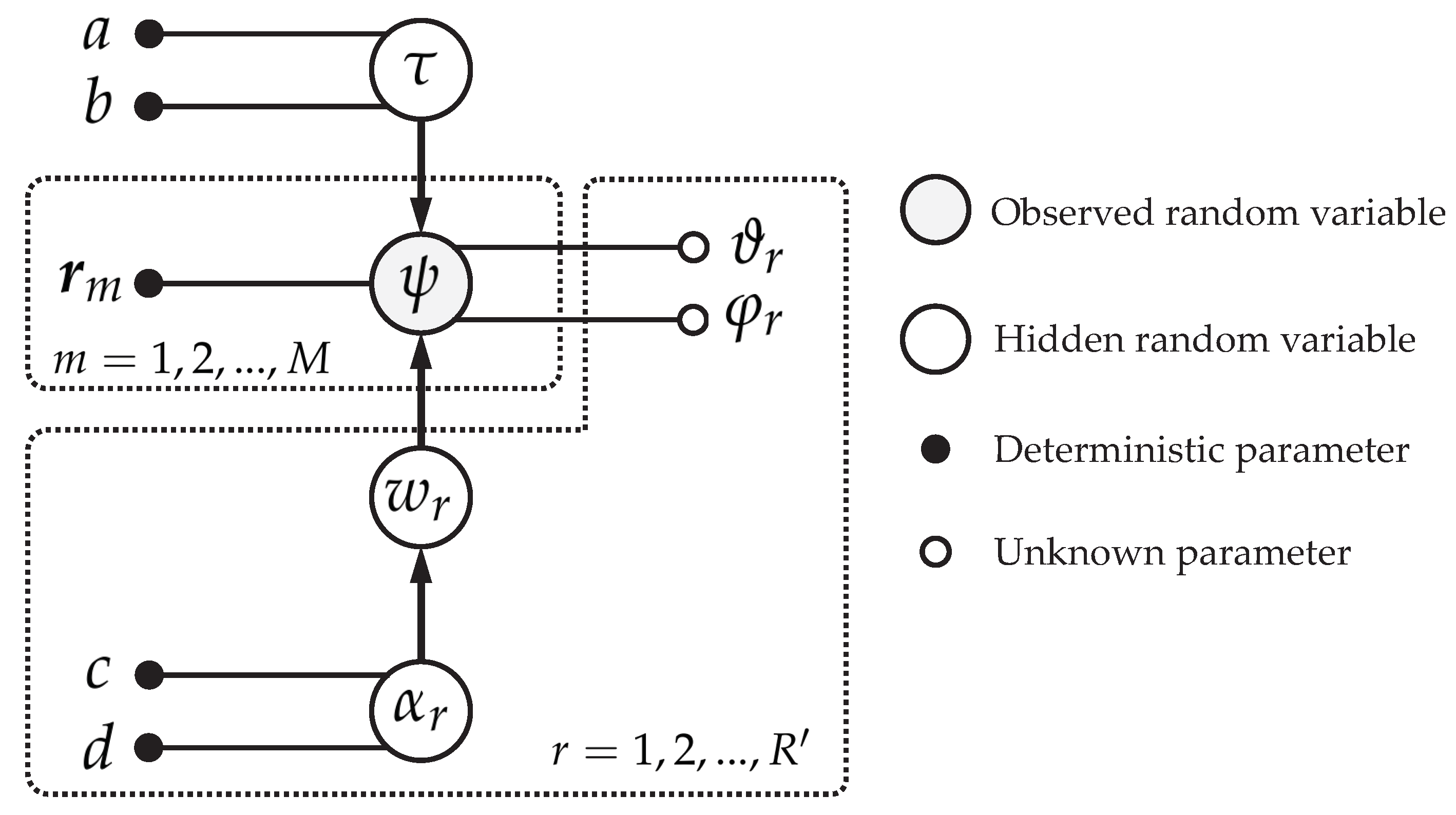
3.2.2. Probabilistic Model for SBL
3.2.3. Hidden Random Variable Inference
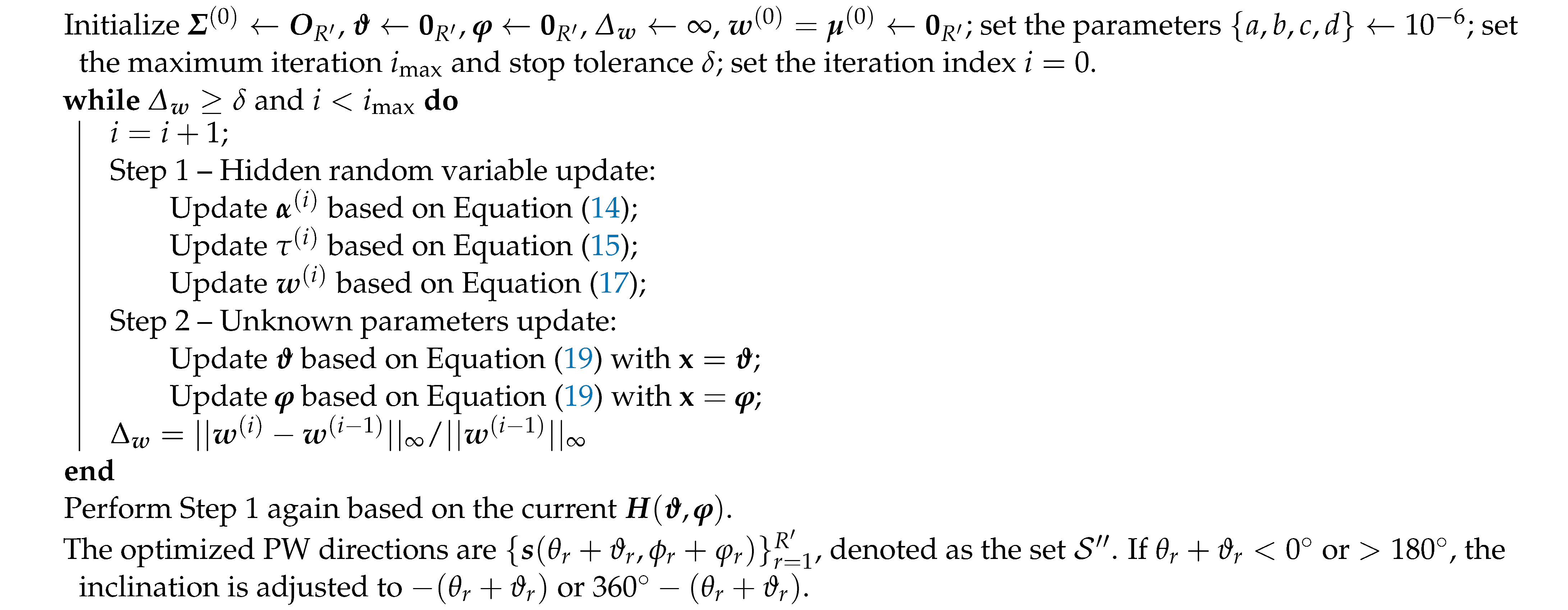
| Algorithm 1: Stage 2: Estimation of PWs using parametric SBL (parSBL). |
 |
4. Simulations
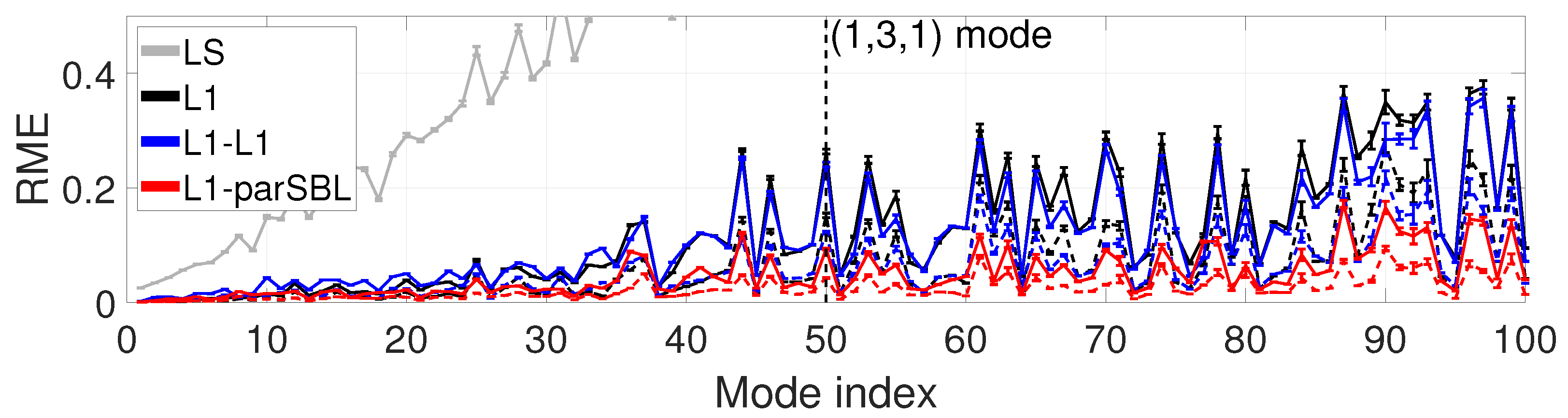
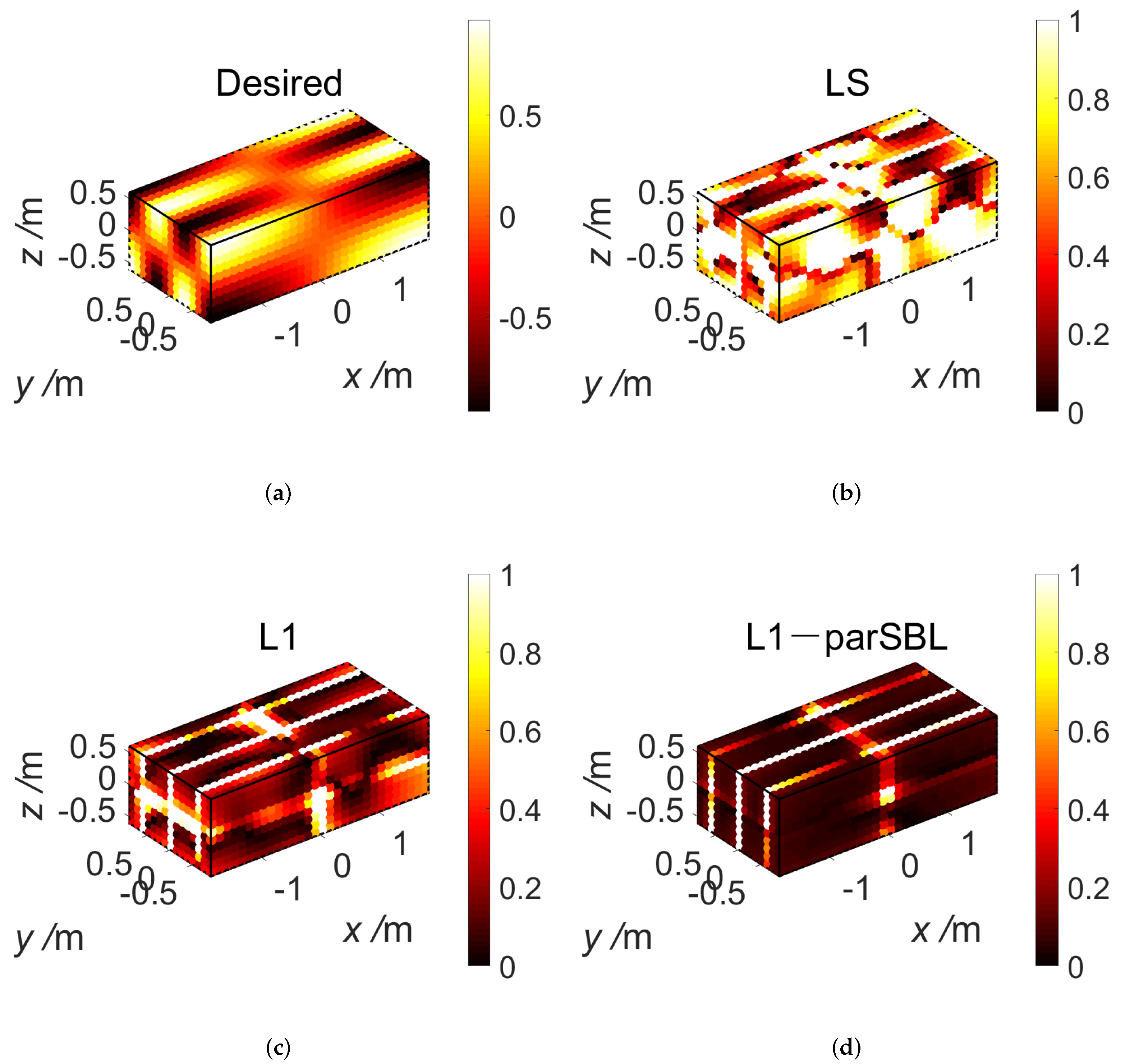
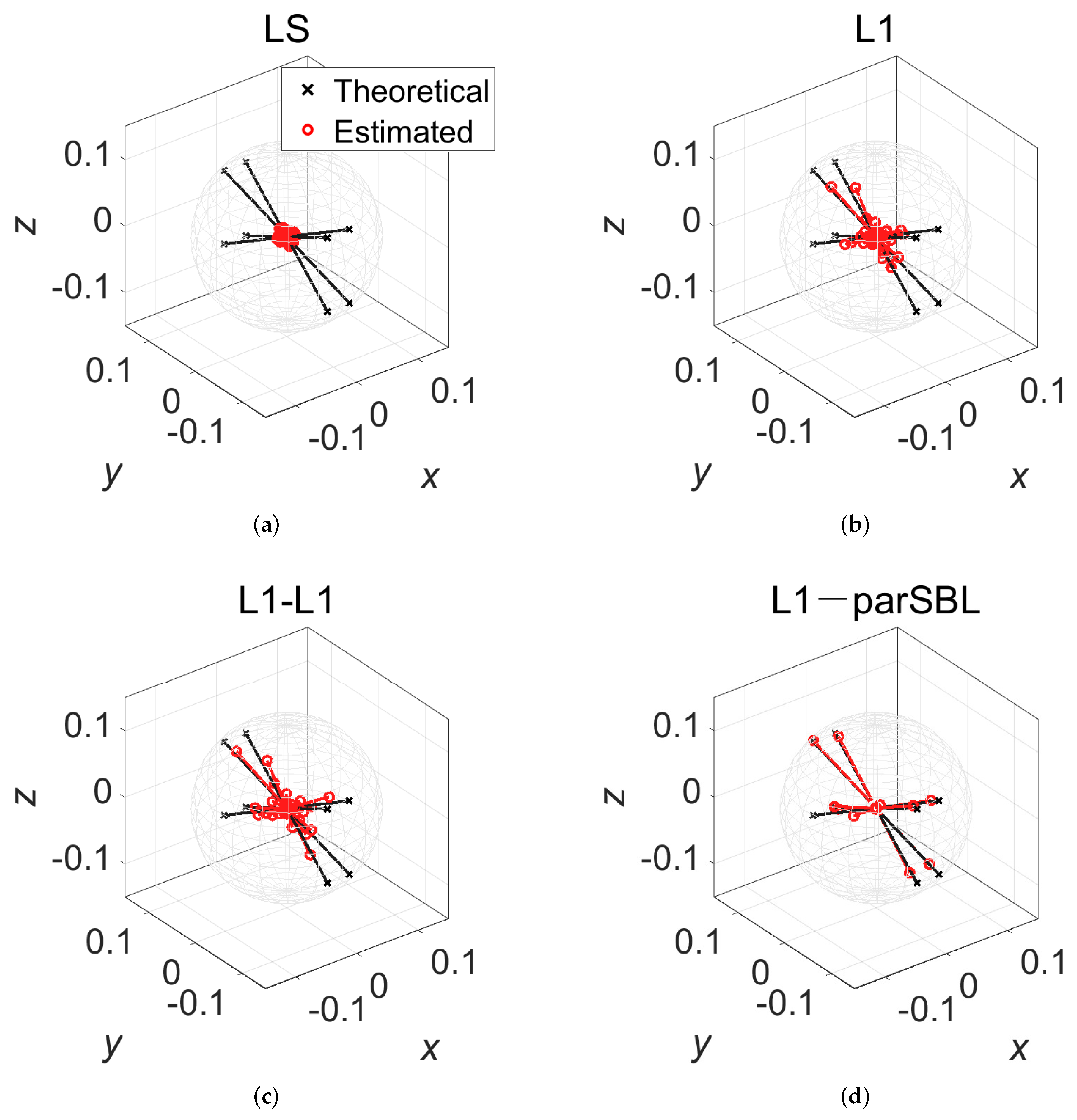
4.1. Validation Case: A Rigid-Walled Rectangular Enclosure
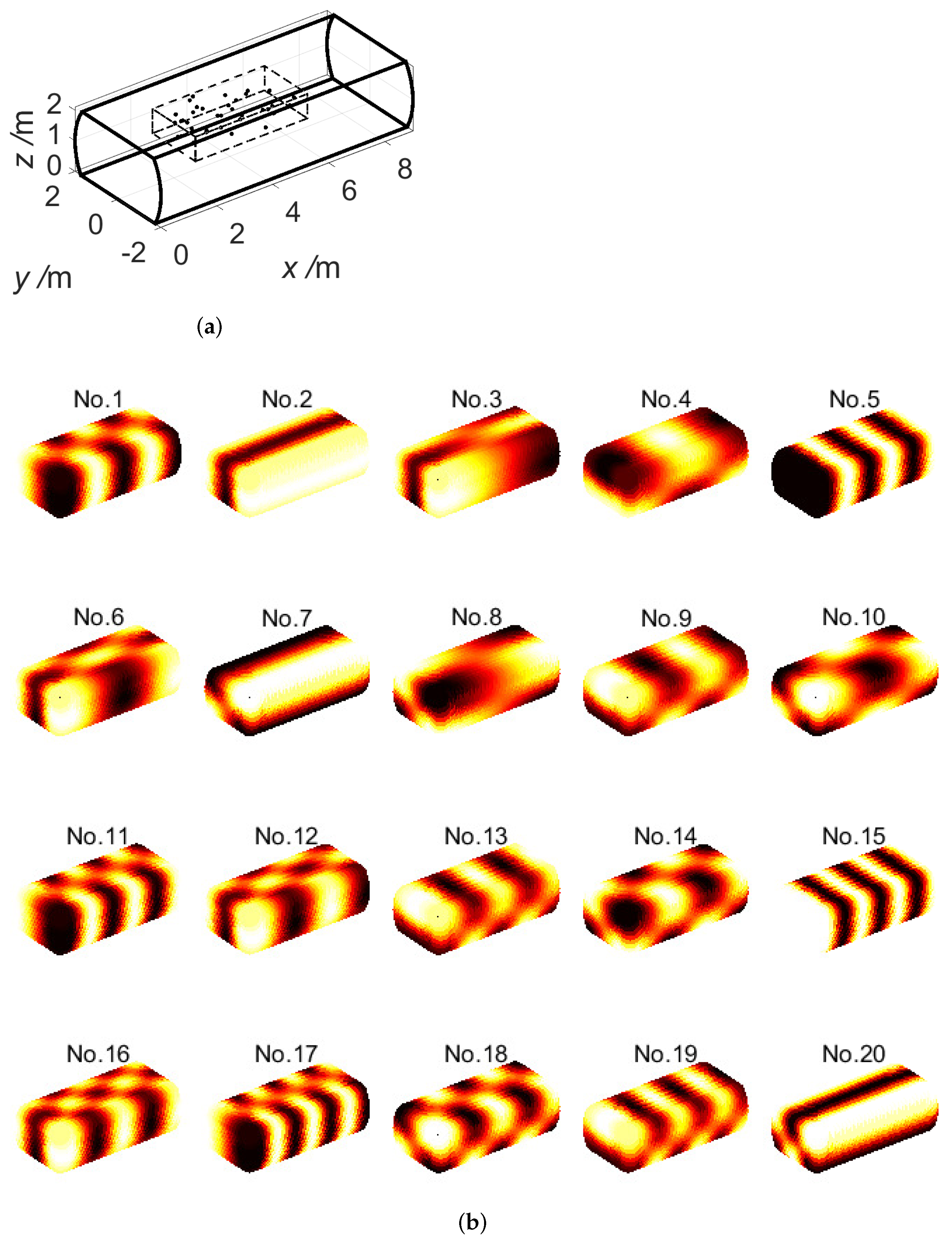
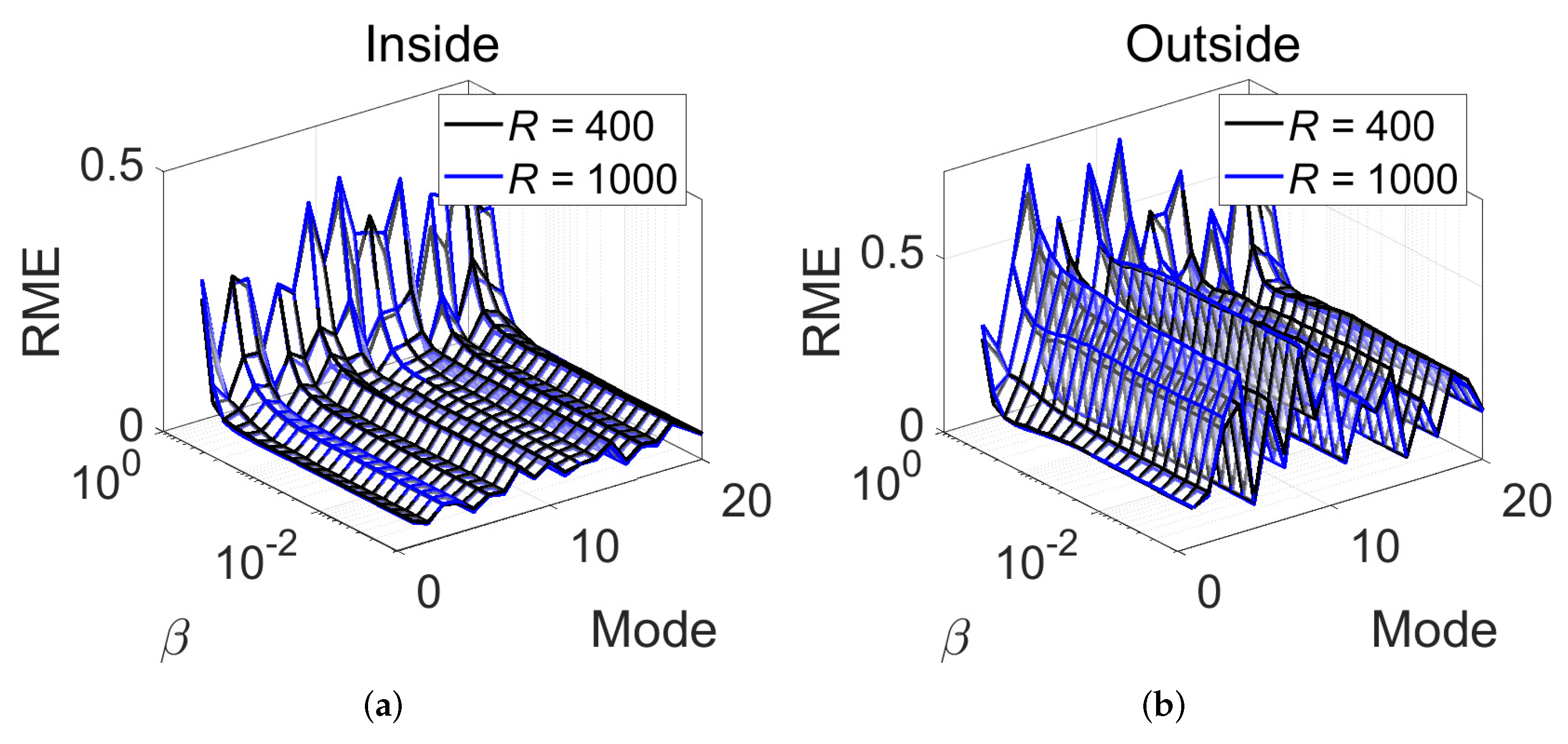
4.2. Case: An Aircraft Cabin with Damping Floor
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Murillo Gómez, D.M.; Astley, J.; Fazi, F.M. Low frequency interactive auralization based on a plane wave expansion. Appl. Sci. 2017, 7, 558. [Google Scholar] [CrossRef]
- Mazur, R.; Katzberg, F.; Mertins, A. Robust room equalization using sparse sound-field reconstruction. In Proceedings of the ICASSP 2019–2019 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019. [Google Scholar]
- Bai, M.; Hsu, H.; Wen, J. Spatial sound field synthesis and upmixing based on the equivalent source method. J. Acoust. Soc. Am. 2014, 135, 269–282. [Google Scholar] [CrossRef]
- Jin, W.; Kleijn, W. Theory and design of multizone soundfield reproduction using sparse methods. IEEE/ACM Trans. Audio Speech Lang. Process. 2015, 23, 2343–2355. [Google Scholar]
- Caviedes-Nozal, D.; Heuchel, F.; Brunskog, J.; Riis, N.; Fernandez-Grande, E. A Bayesian spherical harmonics source radiation model for sound field control. J. Acoust. Soc. Am. 2019, 146, 3425–3435. [Google Scholar] [CrossRef]
- Ajdler, T.; Sbaiz, L.; Vetterli, M. The plenacoustic function and its sampling. IEEE Trans. Signal Process. 2006, 54, 3790–3804. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B. An introduction to compressive sampling. IEEE Signal Process. Mag. 2008, 25, 21–30. [Google Scholar] [CrossRef]
- Gerstoft, P.; Mecklenbräuker, C.F.; Seong, W.; Bianco, M.J. Introduction to compressive sensing in acoustics. J. Acoust. Soc. Am. 2018, 143, 3731–3736. [Google Scholar] [CrossRef] [Green Version]
- Koyama, S. Sparsity-based sound field reconstruction. Acoust. Sci. Technol. 2020, 41, 269–275. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, K. Compressive sensing based spherical harmonics decomposition of a low frequency sound field within a cylindrical cavity. J. Acoust. Soc. Am. 2017, 141, 1812–1823. [Google Scholar] [CrossRef]
- Wang, Y.; Chen, K. Sound field reconstruction within an entire cavity by plane wave expansions using a spherical microphone array. J. Acoust. Soc. Am. 2017, 142, 1858–1870. [Google Scholar] [CrossRef] [PubMed]
- Mignot, R.; Chardon, G.; Daudet, L. Low frequency interpolation of room impulse responses using compressed sensing. IEEE/ACM Trans. Audio Speech Lang. Process. 2014, 22, 205–216. [Google Scholar] [CrossRef] [Green Version]
- Antonello, N.; De Sena, E.; Moonen, M.; Naylor, P.A.; Van Waterschoot, T. Room impulse response interpolation using a sparse spatio-temporal representation of the sound field. IEEE/ACM Trans. Audio Speech Lang. Process. 2017, 25, 1929–1941. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Chen, K. Sparse plane wave decomposition of a low frequency sound field within a cylindrical cavity using spherical microphone arrays. J. Sound Vib. 2018, 431, 150–162. [Google Scholar] [CrossRef]
- Verburg, S.A.; Fernandez-Grande, E. Reconstruction of the sound field in a room using compressive sensing. J. Acoust. Soc. Am. 2018, 143, 3770–3779. [Google Scholar] [CrossRef] [PubMed]
- Fernandez-Grande, E. Sound Field Reconstruction in a Room from Spatially Distributed Measurements. In Proceedings of the 23rd International Congress on Acoustics, Aachen, Germany, 9–13 September 2019; pp. 4983–4990. [Google Scholar]
- Pham Vu, T.; Hervé, L. Low frequency sound field reconstruction in a non-rectangular room using a small number of microphones. Acta Acust. 2020, 4, 5. [Google Scholar] [CrossRef]
- Vekua, I. New Methods for Solving Elliptic Equations; North-Holland Publishing Co.: Amsterdam, The Netherlands, 1967. [Google Scholar]
- Moiola, A.; Hiptmair, R.; Perugia, I. Plane wave approximation of homogeneous Helmholtz solutions. Z. Angew. Math. Phys. 2011, 62, 809–837. [Google Scholar] [CrossRef] [Green Version]
- Chi, Y.; Scharf, L.L.; Pezeshki, A.; Calderbank, A.R. Sensitivity to basis mismatch in compressed sensing. IEEE Trans. Signal Process. 2011, 59, 2182–2195. [Google Scholar] [CrossRef]
- Murata, N.; Koyama, S.; Takamune, N.; Saruwatari, H. Sparse sound field decomposition with parametric dictionary learning for super-resolution recording and reproduction. In Proceedings of the 2015 IEEE 6th International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), Cancun, Mexico, 13–16 December 2015; pp. 69–72. [Google Scholar]
- Wang, L.; Liu, Y.; Zhao, L.; Wang, Q.; Zeng, X.; Chen, K. Acoustic source localization in strong reverberant environment by parametric Bayesian dictionary learning. Signal Process. 2018, 143, 232–240. [Google Scholar] [CrossRef]
- You, K.; Guo, W.; Peng, T.; Liu, Y.; Zuo, P.; Wang, W. Parametric sparse Bayesian dictionary learning for multiple sources localization with propagation parameters uncertainty and nonuniform noise. IEEE Trans. Signal Process. 2020, 68, 4194–4209. [Google Scholar] [CrossRef]
- Yang, Y.; Chu, Z.; Yang, Y.; Yin, S. Two-dimensional Newtonized orthogonal matching pursuit compressive beamforming. J. Acoust. Soc. Am. 2020, 148, 1337–1348. [Google Scholar] [CrossRef]
- Beal, M. Variational Algorithms for Approximate Bayesian Inference; University of London: London, UK, 2004. [Google Scholar]
- Buchgraber, T. Variational Sparse Bayesian Learning: Centralized and Distributed Processing; Graz University of Technology: Graz, Austria, 2013. [Google Scholar]
- Tibshirani, R. Regression selection and shrinkage via the lasso. J. R. Stat. Soc. Ser. B 1994, 58, 267–288. [Google Scholar] [CrossRef]
- Rish, I.; Grabarnik, G.Y. Sparse Modeling: Theory, Algorithms, and Applications; CRC Press: Boca Raton, FL, USA, 2014. [Google Scholar]
- Hald, J. A comparison of iterative sparse equivalent source methods for near-field acoustical holography. J. Acoust. Soc. Am. 2018, 143, 3758–3769. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Xie, L.; Zhang, C. Off-grid direction of arrival estimation using sparse bayesian inference. IEEE Trans. Signal Process. 2013, 61, 38–43. [Google Scholar] [CrossRef] [Green Version]
- Fletcher, R. Practical Methods of Optimization, Volume 1: Unconstrained Optimization; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 1980. [Google Scholar]
- Jacobsen, F.; Juhl, P.M. Fundamentals of General Linear Acoustics; John Wiley & Sons Ltd.: Hoboken, NJ, USA, 2013. [Google Scholar]
- Semechko, A. S2-Sampling-Toolbox. Available online: https://github.com/AntonSemechko/S2-Sampling-Toolbox (accessed on 16 December 2021).
- Piironen, J.; Vehtari, A. On the hyperprior choice for the global shrinkage parameter in the horseshoe prior. Artif. Intell. Stat. 2017, 54, 905–913. [Google Scholar]
- Bush, D.; Xiang, N. A model-based Bayesian framework for sound source enumeration and direction of arrival estimation using a coprime microphone array. J. Acoust. Soc. Am. 2018, 143, 3934–3945. [Google Scholar] [CrossRef] [PubMed] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R | L1 | L1-L1 | L1-parSBL |
|---|---|---|---|
| 400 | 0.95 s | 0.96 s | 1.17 s |
| 1000 | 6.23 s | 6.24 s | 6.43 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, J.; Chen, K.; Wang, L.; Zhang, J. Sparse Plane Wave Approximation of Acoustic Modes to Address Basis Mismatch. Appl. Sci. 2022, 12, 837. https://doi.org/10.3390/app12020837
Xu J, Chen K, Wang L, Zhang J. Sparse Plane Wave Approximation of Acoustic Modes to Address Basis Mismatch. Applied Sciences. 2022; 12(2):837. https://doi.org/10.3390/app12020837
Chicago/Turabian StyleXu, Jian, Kean Chen, Lei Wang, and Jiangong Zhang. 2022. "Sparse Plane Wave Approximation of Acoustic Modes to Address Basis Mismatch" Applied Sciences 12, no. 2: 837. https://doi.org/10.3390/app12020837
APA StyleXu, J., Chen, K., Wang, L., & Zhang, J. (2022). Sparse Plane Wave Approximation of Acoustic Modes to Address Basis Mismatch. Applied Sciences, 12(2), 837. https://doi.org/10.3390/app12020837